Изобретение относится к измерительной технике и может быть использовано для определения углов наклона, в частности подвижных объектов.
Известны устройства для определения углов наклона подвижных объектов, использующие в своем составе маятник (авторское свидетельство СССР №727992, кл. G01C 9/12, 1976 г., опубл. 15.04.1980, бюл. №14; авторское свидетельство СССР №1500823, кл. G01C 9/12, 1987 г., опубл. 15.08.1989, бюл. №30). Наличие маятника делает зависимым показания датчиков от линейных ускорений, действующих на подвижный объект. Применение демпферов, компенсаторов действия инерционных сил усложняет конструкция, но не устраняет полностью влияния линейных ускорений.
Наиболее близким к предлагаемому изобретению является маятниковый датчик угла наклона (патент на изобретение RU 2500988, МПК G01C 9/12, 27.06.2012 г., опубл. 10.12.2013, бюл. №34), содержащий в качестве маятника два соединенных между собой стержня, подвешенные на площадке и связанные с датчиками углов, при этом совместное отклонение этих стержней взаимно компенсирует появление вредного сигнала от их отклонения под действием линейных ускорений.
Существенным недостатком такого датчика является установка датчиков углов на площадке, а не на оси ее подвеса. Перемещение стержней приведет к изменению положения центра масс всего маятника и повороту самой площадки, на которой подвешены стержни. Это приведет к погрешности в измерении угла поворота объекта.
Технической задачей изобретения является повышение точности измерения угла наклона объекта при его движении.
Указанная задача достигается тем, что согласно изобретению оба датчика угла установлены на одной оси подвеса, жестко закрепленной в корпусе датчика, и их роторы жестко закреплены на этой оси, статор и шестерня одного датчика угла жестко соединены с маятником и установлены с возможностью их совместного поворота вокруг оси подвеса относительно ротора этого датчика угла, статор и шестерня другого датчика угла установлены с возможностью их совместного поворота вокруг оси подвеса относительно ротора этого датчика угла, шестерни, соединенные со статорами датчиков углов, находятся в зацеплении через четное количество промежуточных шестерен, выходные обмотки статоров датчиков углов соединены с возможностью суммирования их выходных сигналов.
Существенным отличием предлагаемого технического решения является то, что оба датчика угла установлены на одной оси подвеса, жестко закрепленной в корпусе датчика, и их роторы жестко закреплены на этой оси, статор и шестерня одного датчика угла жестко соединены с маятником и установлены с возможностью их совместного поворота вокруг оси подвеса относительно ротора этого датчика угла, статор и шестерня другого датчика угла установлены с возможностью их совместного поворота вокруг оси подвеса относительно ротора этого датчика угла, шестерни, соединенные со статорами датчиков углов, находятся в зацеплении через четное количество промежуточных шестерен, выходные обмотки статоров датчиков углов соединены с возможностью суммирования их выходных сигналов.
На фиг. показан маятниковый датчик угла наклона подвижного объекта.
В корпусе прибора 1 жестко закреплена ось 2, на которой жестко закреплены роторы 3 и 4 датчиков углов, статоры которых 5 и 6 жестко соединены соответственно с шестернями 7 и 8. Статор 6 и шестерня 8 жестко соединены с маятником 9. Шестерни 7 и 8 находятся в зацеплении через промежуточные шестерни 10 и 11, оси которых могут поворачиваться в корпусе 1.
В исходном положении при отсутствии наклона объекта и действующих на него линейных ускорений статоры датчиков не повернуты относительно их роторов, суммарный сигнал, снимаемый с обмоток статоров датчиков углов, равен нулю.
При наклоне объекта, а вместе с ним и корпуса прибора 1 поворачивается закрепленная в корпусе 1 ось 2, а вместе с ней и закрепленные на ней роторы 3 и 4 датчиков углов. При повороте корпуса 1 промежуточная шестерня 10 обегает шестерню 8 статора 6, которые удерживаются неподвижно весом маятника 9. Шестерня 10 через шестерню 11 поворачивает шестерню 7 и вместе с ней статор 5 на угол, равный углу поворота корпуса 1 вместе с осью 2 и ротором 3. Таким образом, ротор 3 и статор 5 повернутся в одну сторону на равный угол, сигнал на выходе обмотки статора 5 будет равен нулю. В то же время ротор 4 повернется относительно неподвижного статора 6, в выходной обмотке которого появится напряжение, пропорциональное углу поворота ротора (и объекта). Так как выходные обмотки статоров соединены с возможностью суммирования их выходных сигналов, сигнал на выходе датчика будет пропорционален углу наклона объекта.
При действии на маятник 9 линейных ускорений произойдет его поворот вместе с шестерней 8 и статором 6 относительно неподвижного ротора 4. При этом шестерня 8 повернет через шестерни 10 и 11 шестерню 7, а вместе с ней и статор 5 относительно неподвижного ротора 3 в направлении, противоположном повороту статора 6. Таким 6образом, в статорах 5 и 6 появятся равные, но противоположные по знаку напряжения. В результате напряжение на выходе датчика угла наклона, равное сумме напряжений выходных обмоток статоров датчиков углов, будет равно нулю.
Таким образом, напряжение на выходе датчика будет пропорционально углу наклона объекта, при этом возможные линейные ускорения, хотя и приведут к отклонению маятника, не приведут к погрешностям выходного сигнала.
Предлагаемое техническое решение позволяет исключить влияние линейного ускорения при движении объекта на результаты измерения угла его наклона, что повышает точность измерения угла наклона объекта при его движении.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК ДЛЯ ИЗМЕРЕНИЯ УГЛОВ ПОВОРОТА ПОДВИЖНЫХ ЭЛЕМЕНТОВ КОНСТРУКЦИЙ | 2015 |
|
RU2605005C1 |
| МАЯТНИКОВЫЙ ДАТЧИК УГЛА НАКЛОНА | 2012 |
|
RU2500988C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ МАЯТНИКОВЫЙ ДАТЧИК УГЛА НАКЛОНА | 2022 |
|
RU2807094C1 |
| Маятниковый датчик угла наклона подвижного объекта | 1987 |
|
SU1500823A1 |
| Гироскопический маятник | 2020 |
|
RU2747913C1 |
| ДАТЧИК УГЛА | 2007 |
|
RU2342634C1 |
| МНОГОСТУПЕНЧАТЫЙ ДАТЧИК УГЛА | 2008 |
|
RU2379627C1 |
| Трехосный гиростабилизатор киноаппарата | 1981 |
|
SU979855A1 |
| Одноосный силовой горизонтальный гиростабилизатор | 2019 |
|
RU2716599C1 |
| Гироскопический маятник | 2019 |
|
RU2719241C1 |
Изобретение относится к измерительной технике и может быть использовано для определения углов наклона, в частности подвижных объектов. Техническим результатом изобретения является повышение точности измерения угла наклона объекта при его движении. Маятниковый датчик угла наклона содержит маятник и два датчика угла, состоящие из статора и ротора. Статоры датчиков углов соединены соосно с шестернями. Оба датчика угла установлены на одной оси подвеса и их роторы жестко закреплены на этой оси. Статор и шестерня одного датчика угла жестко соединены с маятником и установлены с возможностью их совместного поворота вокруг оси подвеса относительно ротора этого датчика угла. Статор и шестерня другого датчика угла установлены с возможностью их совместного поворота вокруг оси подвеса относительно ротора этого датчика угла. Шестерни, соединенные со статорами датчиков углов, находятся в зацеплении через четное количество промежуточных шестерен, выходные обмотки статоров датчиков углов соединены с возможностью суммирования их выходных сигналов. 1 ил.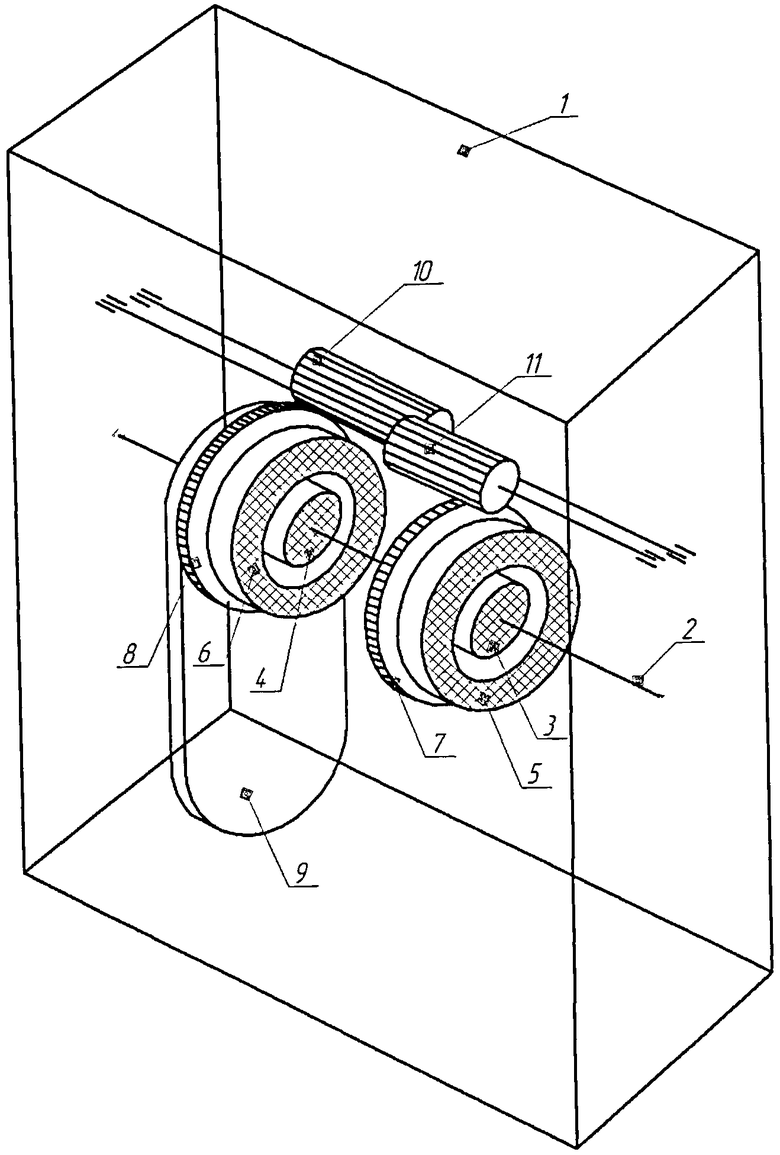
Маятниковый датчик угла наклона, содержащий маятник и два датчика угла, состоящие из статора и ротора, статоры датчиков углов соединены соосно с шестернями, отличающийся тем, что оба датчика угла установлены на одной оси подвеса, жестко закрепленной в корпусе датчика, и их роторы жестко закреплены на этой оси, статор и шестерня одного датчика угла жестко соединены с маятником и установлены с возможностью их совместного поворота вокруг оси подвеса относительно ротора этого датчика угла, статор и шестерня другого датчика угла установлены с возможностью их совместного поворота вокруг оси подвеса относительно ротора этого датчика угла, шестерни, соединенные со статорами датчиков углов, находятся в зацеплении через четное количество промежуточных шестерен, выходные обмотки статоров датчиков углов соединены с возможностью суммирования их выходных сигналов.
| МАЯТНИКОВЫЙ ДАТЧИК УГЛА НАКЛОНА | 2012 |
|
RU2500988C1 |
| Маятниковый датчик угла наклона подвижного объекта | 1987 |
|
SU1500823A1 |
| Гироскопический инклинометр | 1981 |
|
SU1002551A1 |
| JP 61139716 А, 27.06.1986 | |||

