ОБЛАСТЬ ТЕХНИКИ
Это изобретение относится, в целом, к обнаружению в объектах представляющих интерес частиц или веществ. Более конкретно, данное изобретение относится к детекторной установке и к системе обнаружения. Данное изобретение также относится к способу обработки данных от детекторной установки.
УРОВЕНЬ ТЕХНИКИ
При добыче алмазов обычным способом с целью извлечения алмазов расходуются огромные объемы ресурсов, таких как вода и энергия, для переработки, в основном, пустой породы. Переработка породы обычно включает в себя наносящую серьезный ущерб последовательность дробления породы и извлечения алмазов, часто с относительно низким выходом, например, приблизительно 1 карат на тонну переработанной породы. Однако дробление породы обычным способом может привести к разрушению алмазов, тем самым снижая рентабельность работы алмазного рудника.
Технологии, основанные на применении сенсоров или датчиков, являются попыткой свести к минимуму такие нежелательные эффекты за счет раннего обнаружения относительно необработанных алмазоносных пород, которые далее могут быть изолированы и переработаны экологически безопасным способом, сохраняющим целостность алмаза. Однако такая технология позволяет получать данные, которые необходимо обрабатывать сложными способами, позволяющими повысить чувствительность и точность обнаружения алмазов. Такая обработка может предусматривать использование сложных алгоритмических процессов для обеспечения желаемой чувствительности за счет вычислительных ресурсов.
В одной из технологий, известных из предшествующего уровня техники, для обнаружения алмазов в горных породах предусмотрено использование позитронно-эмиссионной томографии (ПЭТ). Этот подход включает облучение горной породы пучком гамма-лучей от тормозного излучения, например, электронов с энергией 40 МэВ, или другого источника фотонов, отличающегося от тормозного излучения, например, обратного комптоновского рассеяния, или других технологий. Порода возвращается к умеренным уровням удельной радиоактивности в течение нескольких минут, к этому времени доминирующую остаточную активность представляют собой изотопы ПЭТ. Когда, по прошествии приблизительно 30 минут, доминирующая радиоактивность представлена ПЭТ-изотопом 11С, породу обследуют с помощью детекторной установки с целью определения того, содержатся ли в ней алмазы, или нет.
Данные классификации, сформированные при использовании этого подхода, обычно связаны с фотонами, выявленными детекторной установкой. Эти фотоны испускаются породой в результате аннигиляции позитронов в породе. Когда изотоп ПЭТ в породе высвобождает частицу позитрон посредством бета-распада, этот позитрон аннигилирует с ближайшим электроном после прохождения короткого пути, который может содержать множественные события рассеяния.
Наиболее частым результатом такой аннигиляции является образование близким к коллинеарным взаимно встречных гамма-квантов с энергией 511 кэВ. Затем каждый фотон проходит через окружающий материал, иногда по пути изменяя энергию и направление. Когда фотоны достигают детекторной установки, эта детекторная установка может выдавать данные классификации в виде данных о событии столкновения/соударения с чувствительным элементом.
Известные схемы обнаружения варьируются от простых чувствительных элементов до относительно сложных детекторных установок, которые обычно включают в себя массивы отдельных чувствительных элементов. Более простые чувствительные элементы могут не обладать необходимой чувствительностью, если только они не предназначены для обнаружения относительно крупных алмазов. Поэтому обычно требуется использовать более сложные детекторные установки. Однако проблема, связанная с более сложными детекторными установками предшествующего уровня техники или системами обнаружения или классификации, с которыми они связаны, заключается в том, что они могут оказаться неспособными передавать и/или обрабатывать данные в требуемых объемах и с требуемым быстродействием.
Данные, передаваемые и/или обрабатываемые при обследовании облученных пород с высокой пропускной способностью и чувствительностью, которая является приемлемой и коммерчески жизнеспособной в горнодобывающей отрасли, где в час перерабатываются значительные объемы (например, приблизительно 700 тонн породы), могут превышать пропускную способность одного высокопроизводительного канала или вычислительную мощность одного компьютера. Эта проблема может усугубляться тем, что для эффективного функционирования расположенных далее по ходу породы систем принудительного отделения обнаружение обычно должно быть выполнено в течение нескольких секунд.
Имеется ряд причин, по которым может быть желательно предусмотреть более высокие скорости передачи данных. Примеры приведены ниже.
Как упоминалось выше, может быть желательным выявление относительно небольших алмазов. Можно считать, что алмаз обнаружен, если собрано достаточно информации для того, чтобы выявленный алмаз являлся статистически значимым по сравнению со случайными колебаниями фона. Чтобы находить более мелкие алмазы, может потребоваться сбор большего объема данных. Этого можно добиться путем повышения уровня активации облучаемой породы и/или увеличения охвата чувствительными элементами, что может привести к увеличению скорости поступления данных.
Также может быть желательным поиск и выявление алмазов в относительно больших объектах, таких как относительно крупные частицы кимберлитовой породы. Фотоны с энергией 511 кэВ, выявляемые методом обнаружения ПЭТ, могут быть поглощены при их прохождении через кимберлит. Обычно при этом должны быть одновременно обнаружены два взаимно встречных фотона на противоположных плоскостях детекторной установки (например, над кимберлитовой породой и под ней), образующие линию отклика (line of response, LoR). Чем больше длина пути через кимберлит, тем выше вероятность того, что фотон будет поглощен, a LoR не будет зарегистрирована. По мере увеличения размеров частиц кимберлита (или увеличения глубины слоя кимберлита) длина пути возрастает. Это должно быть компенсировано увеличением активации и, следовательно, скорости поступления данных.
Кроме того, может быть желательным увеличение пропускной способности системы, например, количества тонн породы, которое может быть переработано за час. Для этого может потребоваться повышение активации, чтобы обеспечить быстрый сбор данных, а материал при этом мог проходить через чувствительные элементы с большей скоростью. Пропускную способность также можно увеличить путем проведения большего объема активированной породы через детекторную установку за любое заданное время. Такие технологии могут обусловить повышение требований к обработке данных в системе обнаружения.
Кроме того, так называемые «ложно-положительные объекты» снижают соотношение сигнал/шум, что затрудняет идентификацию алмазов. «Ложно-отрицательные объекты» могут излишне увеличивать скорость поступления данных и, таким образом, затруднять передачу и обработку данных с удовлетворительной скоростью в системе обнаружения. LoR регистрируют путем определения местоположения двух фотонов, которые попадают в противоположные плоскости детектора в течение короткого временного окна, известного как «окно совпадения» или «время разрешения совпадения». Это окно определяет максимальное временное разделение между обнаруженными событиями совпадения для данной системы обнаружения. Если разница во времени обнаружения двух событий меньше окна совпадений, их классифицируют как совпадающие события. Выбор окна совпадений - это задача оптимизации, которая зависит от характеристик системы (степень активации, объем породы, размер и форма чувствительного элемента и т.д.). Если длительность такого окна слишком мала, то теряются информативные LoR; при слишком большой длительности будут выявляться ложноположительные LoR.
Факторы, влияющие на окно совпадений, включают в себя время полета фотонов (например, если аннигиляция позитрона происходит ближе к верхнему, а не к нижнему чувствительному элементу, то верхний фотон прибывает немного раньше, чем нижний фотон, из-за конечной скорости света), свойства детекторной установки и/или отдельных чувствительных элементов (например, различные сцинтиллирующие кристаллы, которые преобразуют фотоны в световые вспышки, имеют разное время нарастания светового импульса и световой выход), а также свойства электронных элементов.
Ненулевое значение длины/времени, связанное с окнами совпадений, подразумевает, что во время работы в пределах окна совпадений события может поступить некоррелированный случайный сигнал, что приведет к созданию «ложной» LoR, то есть LoR, которая состоит из двух событий обнаружения, которые не являются парными фотонами с энергией 511 кэВ, возникшими в результате аннигиляции одного и того же позитрона. Для окна совпадения заданного размера частота ложных LoR обычно увеличивается по мере увеличения примерно квадрата общей скорости поступления данных, поскольку на секунду приходится больше событий, что увеличивает вероятность того, что одно из них случайно произойдет в течение окна совпадения. По мере повышения активации породы количество ложных LoR может резко возрасти.
Поэтому желательно разработать систему обнаружения, которая снижала бы количество ложных LoR до относительно небольшой доли от истинных LoR. Активность должна быть достаточно низкой с учетом окна совпадений, приводящей к допустимой частоте ложных совпадений, в то время как количество LoR, которое может быть получено для заданного объема породы, должно быть достаточно высоким, чтобы обеспечить минимальное обнаружение, необходимое для функционирования такой системы обнаружения на удовлетворительном уровне.
Существует потребность в установке, системе и/или способе, способных решить или по меньшей мере облегчить некоторые из упомянутых выше проблем.
В рамках настоящего описания термин «объект», можно понимать как означающий частицу горной породы, такой как кимберлит, независимо от ее размера, или свободный алмаз. Соответственно, термины «объект», «порода», «частица» и «кимберлит» могут использоваться в данном документе как взаимозаменяемые. Термин «объект» может также распространяться и на другие объекты, которые отображаются или анализируются с помощью способа обнаружения, например, тело человека или животного или часть тела, поскольку концепции, содержащиеся в данном документе, применяются, с необходимыми изменениями, в медицинских установках позитронно-эмиссионной томографии (ПЭТ).
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В соответствии с одной задачей данного изобретения предложена детекторная установка, содержащая, по меньшей мере, один массив чувствительных элементов, при этом такие чувствительные элементы выполнены с возможностью обнаружения фотонов, испускаемых объектом в результате аннигиляции позитронов из-за облучения объекта фотонами с заданной энергией, при этом каждый чувствительный элемент в массиве связан или ассоциирован с одним или несколькими другими чувствительными элементами в массиве для определения области интереса (RoI), при этом каждая RoI включает в себя подмножество чувствительных элементов в массиве, и при этом такая детекторная установка включает в себя или соединена с возможностью связи с блоком триггера совпадений, который выполнен с возможностью регистрации или определения совпадения в ответ на прием сигналов обнаружения от двух разных чувствительных элементов, составляющих часть одной и той же RoI, указывающих на обнаружение, по существу, встречных коллинеарных и совпадающих фотонов в RoI.
Обнаружение по существу встречных коллинеарных и совпадающих фотонов в RoI может быть использовано при определении представляющего интерес материала/материалов в объекте.
Предварительно заданная энергия может быть энергией, при которой из-за ядерной реакции между фотонами и углеродом возникает гигантский дипольный резонанс (ГДР, GDR), что позволяет использовать детекторную установку для обнаружения алмаза или других представляющих интерес материалов. Фотоны могут быть фотонами гамма-излучения. Детекторная установка может выполнена с возможностью обнаружения фотонов, имеющих уровень энергии приблизительно 511 кэВ, и отклонения фотонов, не имеющих уровня энергии, приближенного к 511 кэВ.
Как упоминалось выше, отображаемый объект может не ограничиваться контекстом добычи полезных ископаемых, но может представлять собой биологический материал или любой другой материал или среду. Важной является потребность в ПЭТ, медицинского или какого-либо другого назначения, обеспечивающей высокую пропускную способность при обращении или обработке данных ПЭТ. Например, это может быть полное ПЭТ-обследование тела или ПЭТ-видео, которые характеризуются значительными объемами данных и высокими скоростями их обработки.
По меньшей мере, один массив чувствительных элементов может включать в себя пару разнесенных в пространстве массивов чувствительных элементов, ориентированных, как правило, параллельно друг другу. Каждая область интереса (RoI) может включать в себя, по меньшей мере, один чувствительный элемент из каждого массива чувствительных элементов, а блок триггера совпадений может быть выполнен с возможностью регистрации совпадения в ответ на прием сигналов обнаружения от чувствительного элемента каждого массива чувствительных элементов, при условии, что чувствительные элементы расположены в одной и той же RoI. В некоторых вариантах осуществления каждая RoI включает в себя один чувствительный элемент из одного из массивов и множество чувствительных элементов из одного из других массивов.
Блок триггера совпадений может быть выполнен с возможностью, в ответ на регистрацию совпадения, передачи сигнала совпадения обратно к каждому из двух чувствительных элементов в качестве информации о срабатывании, указывающей на такое совпадение. Чувствительные элементы могут быть выполнены с возможностью передачи или выпуска данных о событии, относящихся к зарегистрированному сигналу совпадения, на отдельный компьютер для сбора данных (DAQ) в ответ на прием информации о срабатывании, указывающей на сигнал совпадения. Информацией о срабатывании может быть сигнал совпадения. В других примерных вариантах осуществления на уровне чувствительного элемента также может быть предусмотрена быстродействующая система(ы) управления в аппаратном/микропрограммном/программном исполнении, которая способна определять геометрическую информацию обоих локальных субдетекторов-партнеров в событии триггера совпадений, дополнительно позволяя локальному детекторному блоку для адресовать передачу на соответствующий компьютер сбора данных (DAQ).
В соответствии с другой задачей данного изобретения, предложена система обнаружения, которая включает в себя детекторную установку, блок триггера совпадений и, по меньшей мере, один компьютер DAQ, по существу, как описано выше.
В некоторых вариантах осуществления система может включать в себя множество компьютеров DAQ. Каждый компьютер DAQ может быть выполнен с возможностью приема данных о событиях только от тех чувствительных элементов, которые составляют часть одной или нескольких RoI, которые ассоциированы с конкретным компьютером DAQ.
Данные события могут быть необработанными выходными данными, и каждый компьютер DAQ может быть выполнен с возможностью определения линии отклика (LoR) на основе необработанных выходных данных, полученных от чувствительных элементов. LoR может соответствовать воображаемой линии, проходящей через объект и соединяющей столкновения с чувствительными элементами на противоположных сторонах объекта, причем эти столкновения соответствуют встречным коллинеарным и совпадающим фотонам, которые испускаются объектом или от объекта.
В некоторых вариантах осуществления детекторная установка может быть выполнена с возможностью выполнения обнаружения в потоке объектов, проходящем через детекторную установку, например, в горной породе, которая движется через детекторную установку или мимо нее на ленточной или другой конвейерной установке.
Следует понимать, что описанные здесь чувствительные элементы могут окружать ленту. В одном примерном варианте осуществления чувствительные элементы могут окружать ленту так, что LoR имеет ось, которая, по существу, является перпендикулярной направлению перемещения объекта/объектов. В случае медицинских установок, чувствительные элементы могут окружать пациента и/или животное или их часть для достижения той же цели, которая описана в данном документе.
Система обнаружения может быть выполнена с возможностью разделения потока объектов на виртуальные контейнеры. Каждая LoR может быть связана, по меньшей мере, с одним виртуальным контейнером. Каждый компьютер DAQ может быть выполнен с возможностью передачи LoR на компьютер или подсистему обработки объема, настроенную только для обработки LoR, относящихся к одному или нескольким конкретным виртуальным контейнерам. Компьютер или подсистема обработки объема могут быть выполнены с возможностью формирования ПЭТ-изображения на основе LoR, ассоциированных с конкретным виртуальным контейнером.
Следует понимать, что виртуальные контейнеры могут быть привязаны к координатам движущейся ленты. В одном примерном варианте осуществления компьютер DAQ может быть привязан к координатам чувствительного элемента. В связи с этим компьютеры DAQ могут быть не привязаны к виртуальным контейнерам, а могут обрабатывать непрерывную вереницу виртуальных контейнеров.
Система обнаружения может включать в себя множество узлов обработки, ассоциированных с каждым виртуальным контейнером и/или каждым компьютером или подсистемой обработки объема так, что каждый узел обработки оперативно обрабатывает суб-объем объема, ассоциированного с каждым виртуальным контейнером.
В широком смысле, в соответствии с другой задачей данного изобретения, предложен способ обработки данных от детекторной установки, в котором детекторная установка включает в себя, по меньшей мере, один массив чувствительных элементов, причем такой способ содержит:
связывание или ассоциирование каждого чувствительного элемента в массиве с одним или несколькими другими чувствительными элементами в массиве для определения области интереса (RoI), причем каждая RoI включает в себя подмножество чувствительных элементов в массиве;
обнаружение массивом чувствительных элементов фотонов, испускаемых объектом в результате аннигиляции позитронов, возникающих из-за облучения объекта фотонами заданной энергии;
прием блоком триггера совпадений сигналов обнаружения от, по меньшей мере, двух чувствительных элементов; и
регистрация или определение совпадения, если блок триггера совпадений принимает сигналы обнаружения от двух разных чувствительных элементов, образующих часть одной и той же RoI и указывающих на обнаружение в RoI, по существу, встречных коллинеарных и совпадающих фотонов.
RoI могут перекрываться, поэтому подмножества чувствительных элементов, которые формируют RoI, не являются взаимоисключающими подмножествами.
Данный способ может дополнительно содержать:
передачу блоком триггера совпадений в каждый из двух чувствительных элементов информации триггера, указывающей на сигнал совпадения, в ответ на регистрацию или определение совпадения; и
передачу или выдачу двумя чувствительными элементами на компьютер сбора данных (DAQ) данных о событиях, относящихся к зарегистрированному совпадению.
Система обнаружения может включать в себя способность выделять информацию о RoI, относящуюся к каждой конечной точке LoR. Детекторный блок, который был инициирован, как обнаруживший, по меньшей мере, одну из двух совпадающих конечных точек LoR, выдает информацию об этой конечной точке в одну или несколько отдельных систем на следующем уровне (DAQ). Если существует неоднозначность относительно того, какой именно чувствительный элемент RoI мог принять партнерскую конечную точку LoR, этот блок будет выдавать данные более чем в одну систему уровня DAQ. Затем на уровне DAQ будет определена геометрическая часть критериев достоверности LoR, и LoR может быть сформирована правильно. Также на этом этапе может быть выполнено назначение LoR виртуальному ковшу движущейся породы для правильной передачи далее. Чувствительные элементы обладают интеллектуальными функциями, позволяющими выпускать их данные в независимую сеть компьютеров DAQ разной топологии, достигая разделения сигналов в разных сетях.
В соответствии с дополнительной задачей данного изобретения, предложена система обработки для алмазного рудника, которая включает в себя детекторную установку и/или систему обнаружения, по существу, описанную выше.
В еще одной дополнительной задаче данного изобретения предложена система медицинской позитронно-эмиссионной томографии (ПЭТ), при этом такая система содержит, по меньшей мере, одну из детекторных установок, по существу, описанную выше, и систему обнаружения, по существу, описанную выше.
Специалистам в данной области техники будет понятно, что комментарии, которые приведены выше в отношении каждой задачи данного изобретения, могут быть применены, с соответствующими изменениями, ко всем задачам данного изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
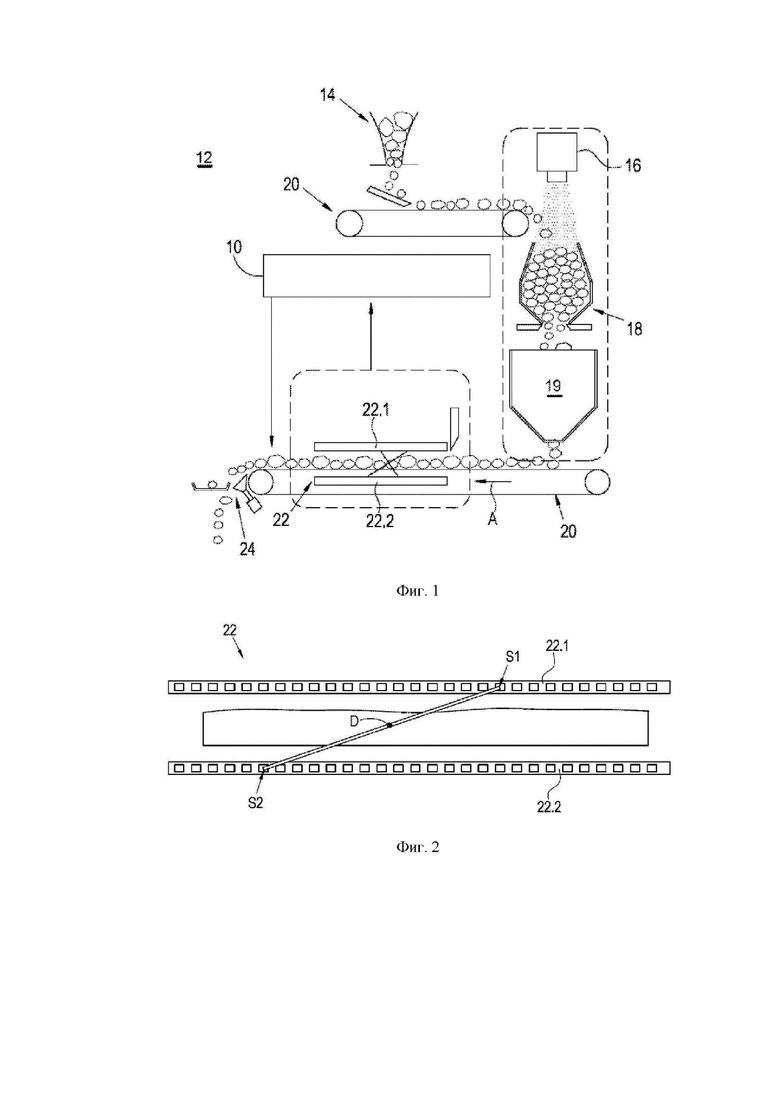
На Фиг. 1 показано схематическое представление примера технологической системы алмазного рудника, в составе которой могут быть реализованы варианты осуществления данного изобретения;
На Фиг. 2 показано изображение кимберлитовой породы на движущейся ленте между панелями чувствительных элементов детекторной установки в соответствии с примерным вариантом осуществления настоящего изобретения, с Ндвумя показанными встречными совпадающими гамма-лучами с энергией 511 кэВ, которые совместно образуют линию отклика (LoR);
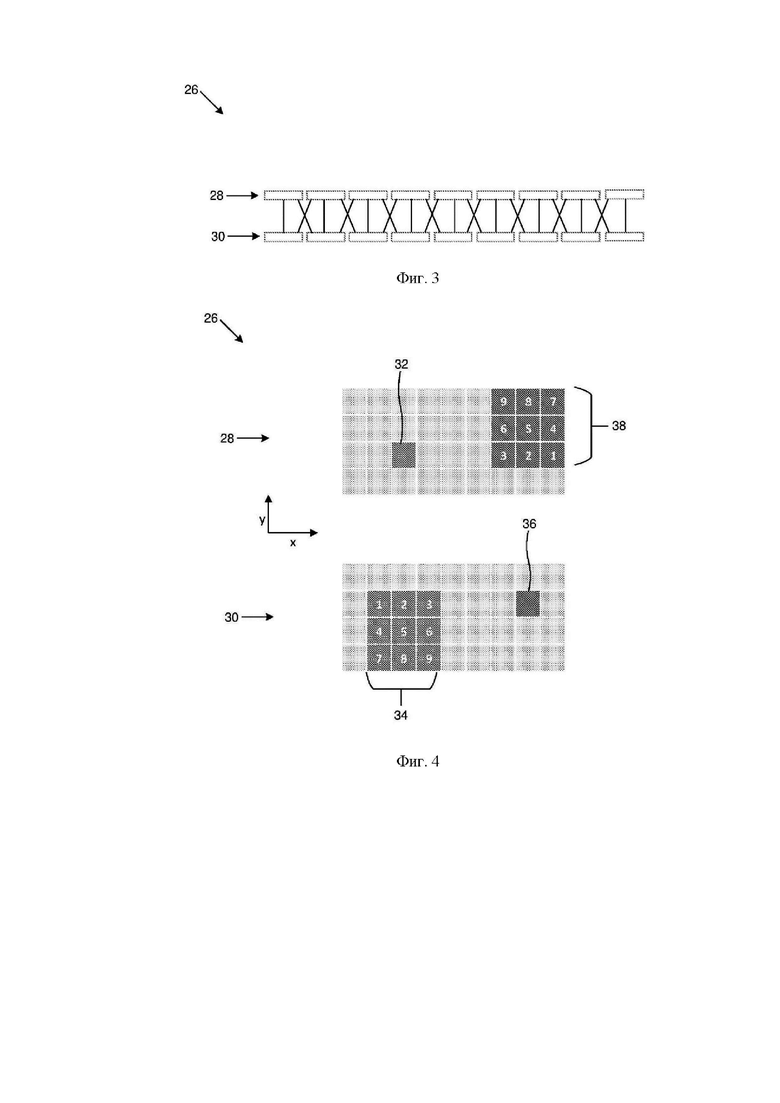
На Фиг. 3 схематически показан вид сбоку детекторной установки, в которой смежные чувствительные элементы в противоположных плоскостях связаны согласно варианту осуществления данного изобретения;
На Фиг. 4 схематически показано присоединение чувствительных элементов в верхней и нижней детекторных плоскостях детекторной установки, показанной на Фиг. 3;
На Фиг. 5 схематически показан первый пример ассоциации чувствительных элементов с компьютерами сбора данных (DAQ) в соответствии с вариантом осуществления данного изобретения;
На Фиг. 6 схематически показан второй пример ассоциации чувствительных элементов с компьютерами DAQ в соответствии с вариантом осуществления данного изобретения;
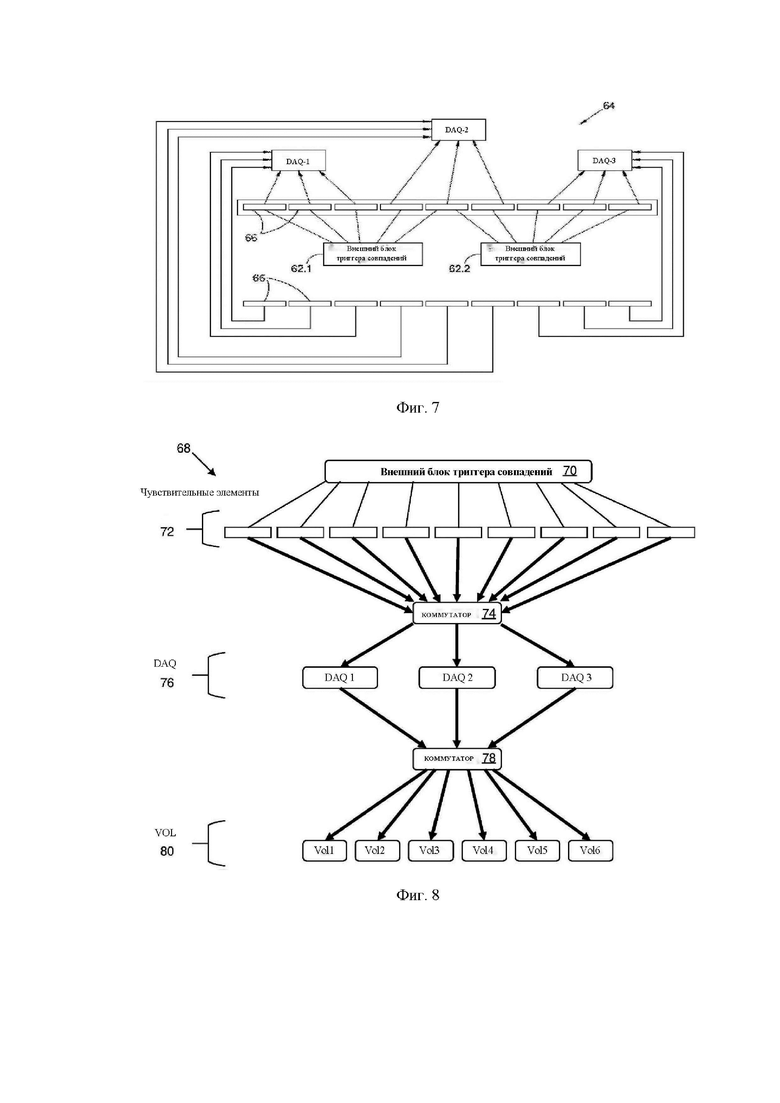
На Фиг. 7 показан первый пример топологии сети, которая включает в себя соединения между чувствительными элементами и внешними блоками триггера совпадений, а также между чувствительными элементами и компьютерами DAQ, в соответствии с вариантом осуществления данного изобретения;
На Фиг. 8 показан второй пример топологии сети, которая включает в себя различные уровни деления системы обнаружения в соответствии с вариантом осуществления данного изобретения;
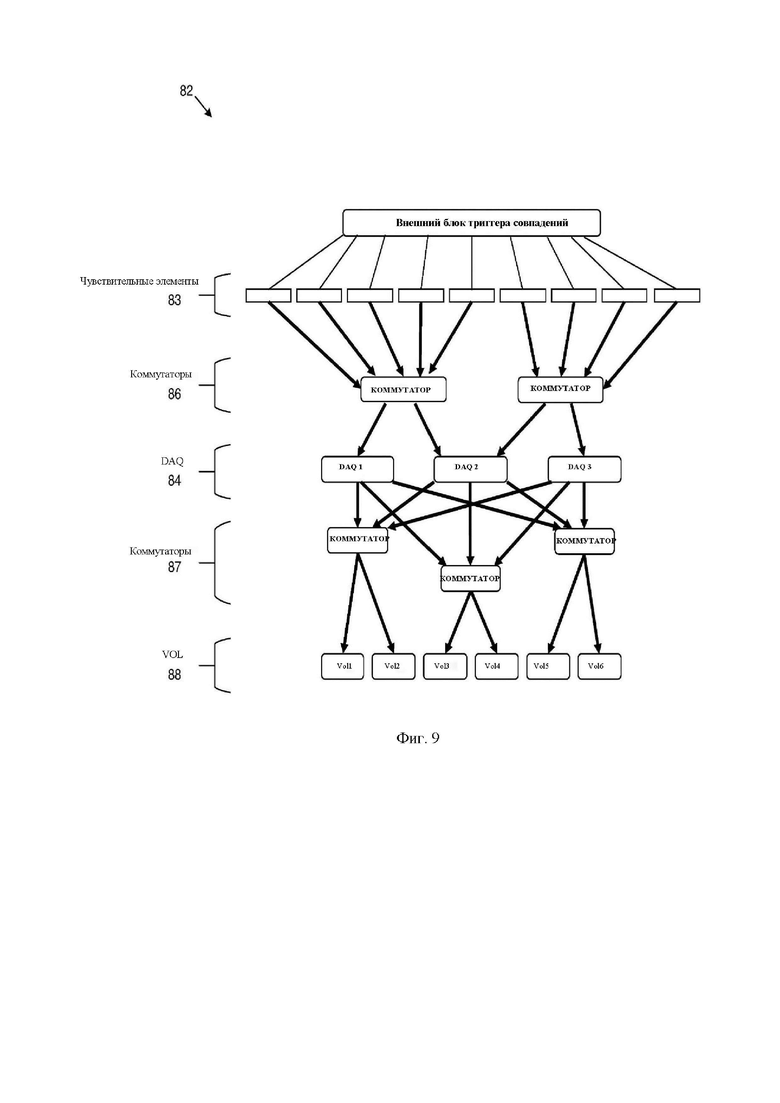
На Фиг. 9 показан третий пример топологии сети, которая включает в себя различные уровни деления системы обнаружения в соответствии с вариантом осуществления данного изобретения;
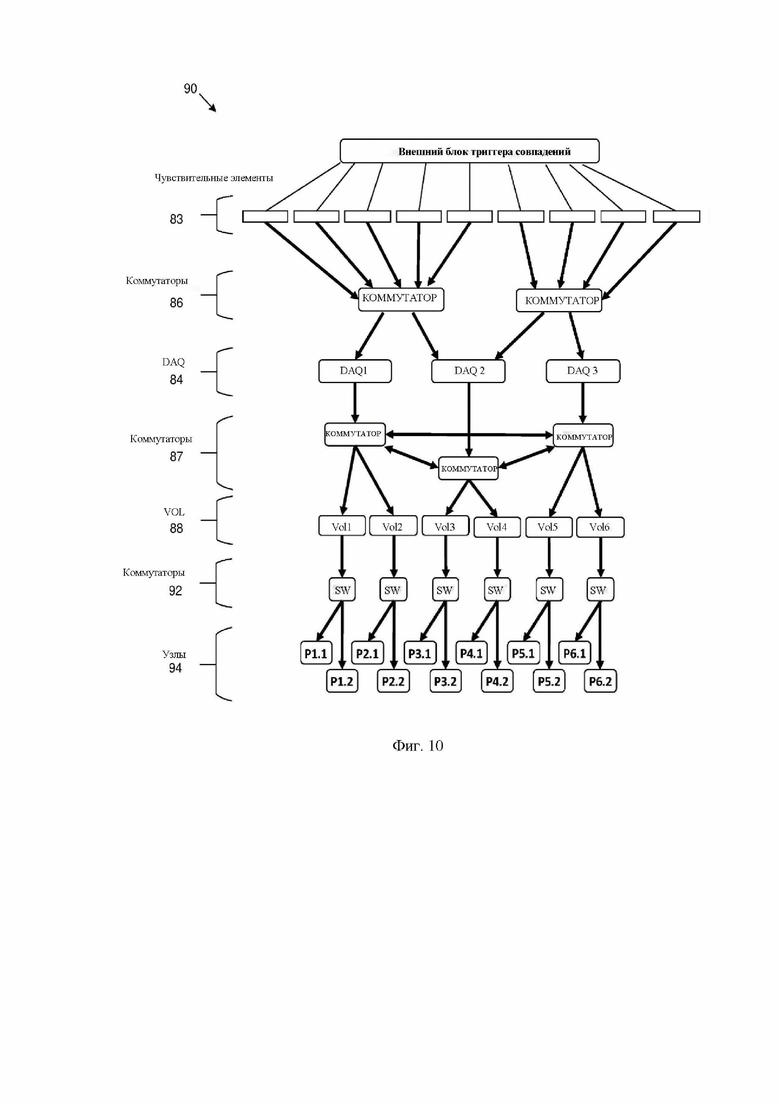
На Фиг. 10 показан четвертый пример топологии сети, которая включает в себя различные уровни деления системы обнаружения в соответствии с вариантом осуществления данного изобретения; и
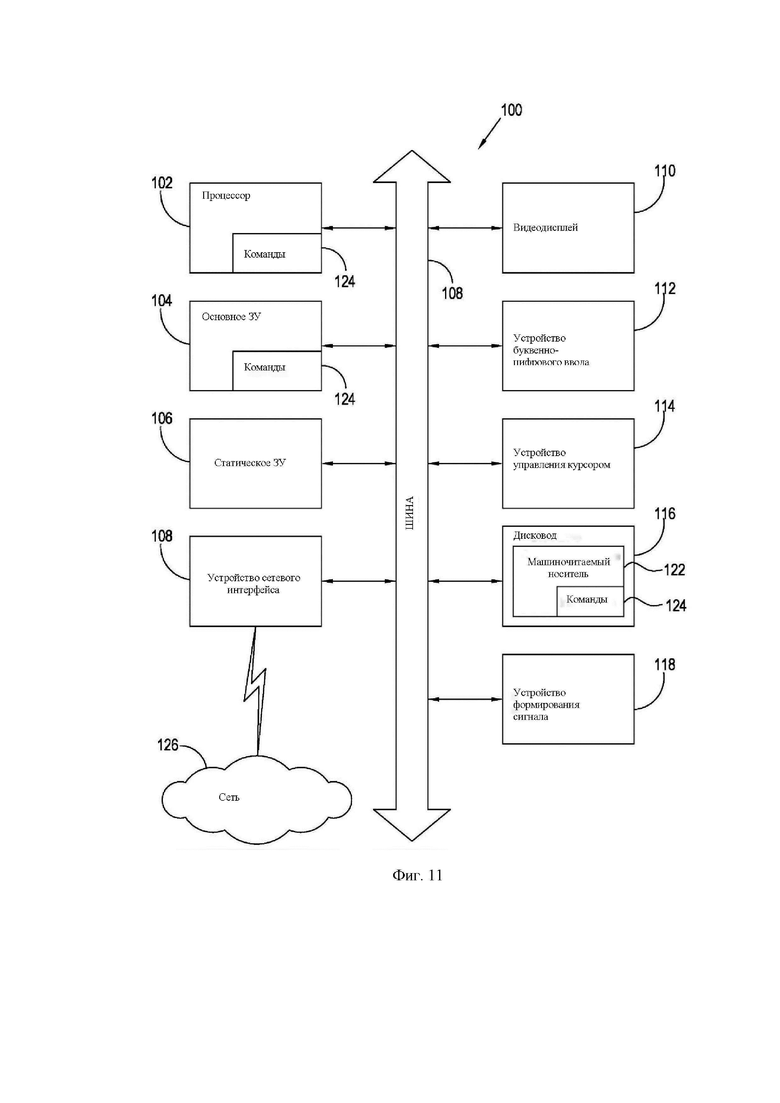
На Фиг. 11 показано схематическое представление машины в примерной форме компьютерной системы, в которой может быть выполнен набор команд, предписывающих машине реализацию любой одной или нескольких методик, рассмотренных в данном документе.
ПОДРОБНОЕ ОПИСАНИЕ СО ССЫЛКОЙ НА ЧЕРТЕЖИ
Последующее описание изобретения предоставлено для более полного понимания изобретения. Специалисты в соответствующей области техники должны понимать, что в описанный вариант осуществления можно внести множество изменений, при этом все еще достигая положительных результатов настоящего изобретения. Также должно быть очевидно, что некоторые из желаемых преимуществ настоящего изобретения могут быть достигнуты путем выбора некоторых признаков настоящего изобретения без использования прочих признаков. Соответственно, специалисты в данной области техники должны понимать, что модификации и адаптации настоящего изобретения возможны, и даже могут быть желательны при определенных обстоятельствах, при этом они являются частью настоящего изобретения. Таким образом, последующее описание приведено для иллюстрирования принципов настоящего изобретения, а не его ограничения.
Следует понимать, что выражение «например», «такой как» и его варианты описывают неограничивающие варианты осуществления раскрываемого объекта изобретения. Ссылка в описании на «один примерный вариант реализации», «другой примерный вариант реализации», «некоторый примерный вариант реализации» или их варианты означает, что конкретный признак, структура или характеристика, описанные в связи с вариантом(-ами) реализации, включены, по меньшей мере, в один вариант осуществления раскрываемого объекта изобретения. Таким образом, использование фразы «один примерный вариант осуществления», «другой примерный вариант осуществления», «некоторый примерный вариант осуществления» или их вариантов не обязательно относится к одному и тому же варианту(ам) осуществления.
Если не указано иное, некоторые особенности объекта, описанного в данном документе, которые для ясности описаны в контексте отдельных вариантов осуществления, также могут быть предоставлены в комбинации в одном варианте осуществления. Аналогично, различные признаки раскрытого здесь объекта изобретения, которые описаны в контексте одного варианта осуществления, также могут быть предоставлены отдельно или в любой подходящей субкомбинации.
Ссылаясь на Фиг. 1 чертежей, пример технологической системы алмазного рудника, в целом обозначен позицией 12. Обнаружение алмазов будет использовано в этом описании в качестве примера реализации вариантов осуществления данного изобретения. Однако следует принимать во внимание, особенно специалистам в данной области техники, что альтернативные варианты осуществления распространяются на другие типы обнаружения и на установки визуализации в средах с большим объемом и высокой скоростью перемещения, например ПЭТ-визуализация/обнаружение, применяемые к телу человека или животного (например, медицинская ПЭТ для всего тела и ПЭТ-видео).
Система 12 обычно включает в себя систему 10 классификации или обнаружения, которая обычно представляет собой компьютеризированную систему, выполненную с возможностью выполнения визуализации и обнаружения алмазов как индивидуальных, отдельных объектов, как встроенных во вмещающие объекты, или как объектов, включенных в массу других объектов.
Технологическая система 12 алмазного рудника может быть расположена в алмазном руднике или рядом с ним, и может содержать подходящее обычное горнодобывающее оборудование, такое как дробилка 14, для грубого измельчения добытой породы до размеров приблизительно 160 мм в диаметре или меньше. Система 12 дополнительно содержит соответствующий излучатель 16 для облучения дробленой породы фотонами. Фотоны, которые облучают горную породу, могут происходить из пучков гамма-лучей от тормозного излучения электронов с энергией примерно 40 МэВ. Вместо этого или в дополнение, эти фотоны могут происходить от обратного комптоновского рассеяния, устройства с плазменным кильватерным полем или подобных устройств. Такие фотоны имеют энергию, при которой из-за ядерной реакции между фотонами и углеродом в породе возникает гигантский дипольный резонанс (ГДР).
Система 12 содержит бункерную установку 18, 19 для удержания облученной породы в течение заданного периода времени. Облученная порода возвращается к умеренным уровням удельной радиоактивности в течение нескольких минут, и к этому времени доминирующую остаточную активность представляют собой изотопы ПЭТ. С учетом этого, бункерная установка 18, 19 выполнена с возможностью удерживать облученную породу в течение времени выдержки, составляющего от двадцати до тридцати минут, при этом ПЭТ-изотоп 11С имеет доминирующую активность в течение этого времени. По истечении времени выдержки бункерная установка 18, 19 может автоматически высвобождать породу.
Система 12 содержит конвейерную установку 20, содержащую соответствующие конвейерные ленты, которые не ослабляют фотоны ПЭТ, для автоматизированной транспортировки породы в системе 12. Конвейерная установка 20 может быть выполнена с возможностью транспортировки породы в потоке пород в системе 12 с постоянной заданной скоростью, например, 1 метр в секунду.
Данная система также содержит детекторную установку 22, которая расположена дальше по ходу от бункерной установки 18, 19 и рядом с конвейерной установкой 20, в частности, рядом с ее лентой так, чтобы обнаруживать испускаемые от нее фотоны ПЭТ.
В одном примерном варианте осуществления и как показано на Фиг. 1 и 2, детекторная установка 22 может содержать пару массивов 22.1 и 22.2 чувствительных элементов, которые расположены над лентой и под ней, соответственно, так, чтобы эффективно охватывать ленту и движущуюся по ней породу. В других вариантах осуществления детекторная установка может быть выполнена иначе, например, она может быть, по существу, цилиндрической, чтобы полностью охватывать ленту.
Массив 22.1 может ограничивать верхнюю детекторную плоскость, которая состоит из множества отдельных чувствительных элементов или детекторных блоков, а массив 22.2 может ограничивать нижнюю детекторную плоскость, которая состоит из множества отдельных чувствительных элементов или детекторных блоков. Массивы 22.1, 22.2 имеют оси зондирования, которые, по существу, расположены поперечно относительно направления перемещения А породы. В одном примерном варианте осуществления детекторная установка 22 содержит чувствительные элементы, подходящие для обнаружения фотонов. При этом чувствительные элементы установки 22 могут быть выполнены в виде сцинтиллирующих кристаллов и детекторов на фотоэлектронных умножителях (ФЭУ) с соответствующими электронными компонентами.
Система 12 также содержит подходящий сортировщик 24, который может быть механическим сортировщиком 24 с электронным управлением, который выполнен с возможностью сортировки потенциально алмазоносных или, другими словами, содержащих алмазы пород или свободных алмазов от потенциально непродуктивных пород или, другими словами, горных пород, не содержащих алмазов.
Система 10 обнаружения соединена с возможностью связи с детекторной установкой 22 и сортировщиком 24 так, чтобы получать данные классификации от детекторной установки 22 и формировать соответствующие управляющие сигналы для управления сортировщиком 24 для разделения алмазоносных и непродуктивных пород. В этом отношении для системы 10 важной является обработка данных классификации с достаточной скоростью, чтобы иметь возможность своевременно отправлять сигнал (данные) активации на сортировщик 24. Система 10 может включать в себя различные вычислительные компоненты, такие как те, которые упоминаются ниже со ссылкой на Фиг. 5-10.
Сортировщик 24 может быть выполнен с возможностью сортировки алмазов или алмазоносных пород по одной или нескольким категориям в соответствии с одним или несколькими конкретными свойствами обнаруженного алмаза/алмазоносной породы, в отличие от простого отделения алмазов/алмазоносной породы от непродуктивной породы.
Система 10 может быть сопряжена с детекторной установкой 22 и/или сортировщиком 24 проводным или беспроводным способом. В одном примерном варианте осуществления система 10 соединена с возможностью связи с установкой 22 через коммуникационную сеть, которая может содержать один или несколько различных типов коммуникационных сетей. В этом отношении коммуникационная сеть может представлять собой одну сеть или несколько сетей из Интернета, локальной сети (LAN), глобальной сети (WAN), городской сети (MAN), различных типов телефонных сетей (например, телефонная коммутируемая сеть общего пользования (PSTN) с технологией цифровой абонентской линии (DSL)) или сети мобильной связи (например, глобальная система мобильной связи (GSM), общая услуга пакетной радиосвязи (GPRS), множественный доступ с кодовым разделением каналов (CDMA), а также другие подходящие технологии сети мобильной связи) или любое их сочетание. Отсюда следует, что, хотя это не обязательно может быть практичным, предполагается, что в некоторых примерных вариантах осуществления система 10 не обязательно должна находиться на территории рудника, а может быть удалена от нее. В некоторых вариантах осуществления установка 22 может составлять часть системы 10.
Система 10 выполнена/запрограммирована для приема данных классификации и определения того, является ли объект потенциально алмазом или алмазоносным, путем обработки полученных данных классификации. Данные классификации обычно связаны с фотонами, обнаруженными установкой 22, которые испускаются объектом в результате аннигиляции позитронов в облученном объекте, принятом из бункера 18. В частности, со ссылкой на Фиг. 2 чертежей, когда изотоп ПЭТ в кимберлитовой породе высвобождает частицу позитрон посредством бета-распада, этот позитрон аннигилирует с ближайшим электроном после прохождения короткого пути, который может содержать множественные события рассеяния. Наиболее частым результатом такой аннигиляции является образование близким к коллинеарным взаимно встречных гамма-квантов с энергией 511 кэВ. Затем каждый фотон проходит через окружающий материал, иногда по пути изменяя энергию и направление. Когда фотоны достигают массивов 22.1, 22.2 детекторной установки в точках S1, S2, установка 22 выводит данные классификации в форме данных о событии столкновения/соударения с чувствительным элементом, например, которые содержат данные, указывающие на местоположение столкновения с массивами 22.1, 22.2, энергию фотона и временную метку. Это позволяет определить или оценить положение алмаза (см «D» на Фиг. 2).
Как пояснялось выше в разделе «Предшествующий уровень техники», элементарной единицей изображения ПЭТ является линия отклика (LoR), возникающая в результате обнаружения события аннигиляции одиночного позитрона с учетом положения детекторной установкой 22. В связи с этим для обнаружения алмаза на каждый кусок породы (диаметром 10 см) может потребоваться примерно миллион таких событий. LoR должны быть преобразованы в реконструированные с помощью ПЭТ 3D-изображения, с размерами вокселей в миллиметровом диапазоне. Отсюда следует, что при стандартной пропускной способности 700 тонн в час необходимо анализировать сотни таких изображений в секунду. Таким образом, система 10 обнаружения и/или детекторная установка 22 могут иметь значительные нагрузки, связанные с обработкой, передачей и/или вычислениями.
Варианты осуществления настоящего изобретения предусматривают управление данными с высокой пропускной способностью в системе обнаружения, такой как система 10. Данные, передаваемые и/или обрабатываемые такой системой, могут превышать транспортные возможности одного канала с высокой пропускной способностью или обрабатывающие возможности одного компьютера.
Принцип, который может быть применен для управления данными с высокой пропускной способностью, это так называемое «распараллеливание». Это означает, что набор данных должен быть сегментирован на отдельные потоки, каждый из которых имеет достаточно низкие требования к пропускной способности, чтобы их можно было как поместить в полосе пропускания каналов связи, так и обработать вычислительными мощностями компьютеров в системе обнаружения за достаточно короткое время. Распараллеливание не относится к простому сегментированию потока данных. Сегменты должны относиться к областям интереса (RoI), которые необходимо тщательно выбирать, как будет показано ниже. Предпочтительно, чтобы RoI имели низкую корреляцию между собой так, чтобы всех данных для заданной RoI было достаточно для обработки этой RoI.
Кроме того, могут быть заданы несколько уровней распараллеливания. Один уровень относится к сегментированию системы обнаружения или детекторной установки на RoI детектора, другой относится к сегментированию потока породы на набор RoI движущейся породы. Третий уровень сегментации относится к сегментированию системы компьютерного анализа по мере необходимости, для выполнения требуемого анализа за достаточно короткое время. Примеры этих уровней распараллеливания представлены ниже.
Первый пример распараллеливания проиллюстрирован на Фиг. 3 и 4 и относится к разделению инициирования совпадений.
Детекторная установка 26 на Фиг. 3 и 4 включает в себя верхний массив чувствительных элементов (далее «верхняя плоскость 28») и нижний массив чувствительных элементов (далее «нижняя плоскость 30»).
Разделение выполняется системой обнаружения, которая способна распознавать определенные связи или ассоциации между отдельными чувствительными элементами в верхней плоскости 28 и нижней плоскости 30. Блок триггера выполнен с возможностью приема сигналов обнаружения (быстрых сигналов) от отдельных чувствительных элементов детекторной установки 26. Все линии быстрых сигналов, представляющих собой синхронизированные одиночные обнаружения (соответствующих параметров), от чувствительного элемента к внешнему блоку совпадений, могут быть согласованы по длине, чтобы устранить разницу во времени задержки сигналов от разных чувствительных элементов, когда они передаются во внешний блок совпадения.
Если время прихода быстрых сигналов, полученных от двух чувствительных элементов, находится в пределах окна совпадений, внешний блок триггера совпадений отправляет инициирующую информацию, указывающую на сигнал совпадения (быстрый стробирующий сигнал), обратно на оба рассматриваемых чувствительных элемента (т.е. один расположен в верхней плоскости 26, и один - в нижней плоскости 28), и затем они могут передавать, сообщать или выдавать свои события в сеть или систему обнаружения. Эти события могут быть помещены в буфер для устранения рандомизации частоты событий, что позволяет повысить пропускную способность для данных. Если чувствительный элемент не получает от внешнего блока триггера инициирующую информацию, указывающую на стробирующий сигнал подтверждения совпадения, событие отменяется без потребности в какой-либо дополнительной обработке и длительном формировании события, и чувствительный элемент является свободным для обнаружения следующего события. Это сводит к минимуму время загрузки детектора.
Разделение необработанных выходных данных чувствительного элемента через топологически разнесенные сети с целью обработки поступающих с высокой скоростью исходных данных основано на геометрическом положении LoR и возрастающей декорреляции LoR, которые относятся к точкам источников, которые дополнительно разнесены друг от друга. Следовательно, разделение основано на геометрии. LoR возникает из достоверного совпадения, зарегистрированного в двух разных местах детектора. Термин «достоверный» относится к временному окну совпадения, а также к пространственной взаимосвязи конечных точек LoR. Существуют несколько способов, с помощью которых может быть реализовано условие достоверности, а также оно может быть реализовано на разных уровнях распараллеливания. В качестве одного примера, детекторный блок, который был инициирован, как обнаруживший, по меньшей мере, одну из двух совпадающих конечных точек LoR, выдает информацию об этой конечной точке в одну или несколько отдельных систем на следующем уровне (DAQ). Если существует неоднозначность относительно того, какой именно чувствительный элемент RoI мог принять партнерскую конечную точку LoR, этот блок будет выдавать данные более чем в одну систему уровня DAQ. Затем на уровне DAQ будет определена геометрическая часть критериев достоверности LoR, и LoR может быть сформирована правильно. Также на этом этапе может быть выполнено назначение LoR виртуальному ковшу движущейся породы для правильной передачи далее. Также может быть предусмотрена отдельная быстродействующая система на уровне распараллеливания чувствительных элементов, которая устанавливает, будут ли конечные точки LoR иметь правильное пространственное соотношение. Концептуально это возможно, поскольку существует возможность добавить в локальную систему обнаружения достаточный объем интеллектуальных функций, чтобы установить, соответствуют ли конечные точки LoR условию правильного пространственного соотношения.
В примере, показанном на Фиг. 3 и 4, чувствительные элементы в детекторной установке 26 разделены способом, описанным выше. Это допускает совпадения или ассоциации/связи только между теми чувствительными элементами, которые расположены близко друг к другу с геометрической точки зрения. Например, данный чувствительный элемент 32 в верхней плоскости 28 сопряжен с 9 детекторными блоками нижней плоскости 30 (обозначенными от 1 до 9 и промаркированными как «34» на Фиг. 4), расположенными под ним: один непосредственно под ним, четыре являются смежными по сторонам и еще четыре - смежными по диагонали, как показано на Фиг. 4. Аналогично, чувствительный элемент 36 в нижней плоскости 30 может быть сопряжен с 9 детекторными блоками верхней плоскости 28 (обозначенными от 1 до 9 и промаркированными как «38» на Фиг. 4). На Фиг. 3 показаны линии, изображающие сопряженные чувствительные элементы в противоположных плоскостях 28, 30, которые могут образовывать совпадения. Можно сказать, что каждый из этих наборов «сопряженных» чувствительных элементов образует отдельную RoI, которая состоит из подмножества от общего количества используемых чувствительных элементов.
Ограничивая количество чувствительных элементов, которые могут формировать совпадения или совмещения, можно иметь большую систему обнаружения (например, систему с более высоким уровнем активации, более высокой пропускной способностью, более высокой производительностью и/или более высокой скоростью) с практически той же частотой ложных срабатываний, как и в системе обнаружения значительно меньшего размера. Разделение, описанное со ссылкой на Фиг. 3 и 4, не допускает наклонных LoR. В связи с этим следует отметить, что наклонные LoR должны проходить в среднем через множество частиц породы, а это означает, что один или оба фотона с энергией 511 кэВ с большой вероятностью будут поглощены или рассеяны по пути. Таким образом, наклонные LoR встречаются редко, поскольку они подавляются в силу геометрических особенностей породы. С другой стороны, в большом массиве чувствительных элементов ложноположительные наклонные LoR распространены в относительно большей степени, поскольку, если выбрать случайное событие на верхней плоскости и случайное событие на нижней плоскости, которые происходят в окне совпадений, существует вероятность, что они не будут находиться прямо друг над другом. В целом это означает, что если наблюдается наклонная LoR, скорее всего, это не истинная LoR, а, скорее, случайное совпадение несвязанных событий в разных частях чувствительного элемента. Наконец, когда действительно получают реальные наклонные совпадения, они, скорее всего, будут неточными из-за высокой вероятности рассеяния. С учетом вышеизложенного в контексте обсуждаемого примерного варианта осуществления, является желательным вырезать наклонные LoR.
Несмотря на это, следует принимать во внимание, что в некоторых примерных вариантах осуществления данного изобретения наклонные LoR могут быть полезны в детекторных установках, где плоскость детектора расположена выше и ниже породы, но отсутствуют чувствительные элементы по бокам. Отсутствие информации от боковых углов означает, что разрешение детектора ухудшается в направлении Z, и точки источников, в конечном итоге, выглядят как сигары, развернутые сверху вниз. Наклонные LoR дают информацию об отсутствующих боковых углах. Если угол наклона составляет меньше 45 градусов, преимущества вырезания наклонных LoR могут перевесить преимущества их включения. Специалистам в области данного изобретения будет понятно, что возможно применение геометрической схемы детектора MinPET, которая действительно имеет полный охват всех углов (сторон) LoR.
Второй пример распараллеливания проиллюстрирован на Фиг. 5 и 6 и относится к разделению при формировании LoR.
Следует понимать, что каждый чувствительный элемент имеет доступ только к «своей» информации, то есть информации об одном событии с одной стороны массива чувствительных элементов, вместе с информацией, включенной в сигнал от внешнего блока триггера совпадений. Таким образом, формирование LoR основано на рассмотрении перечня отдельных событий от противоположных плоскостей детектора, например верхней и нижней плоскостей 28, 30, как описано со ссылкой на Фиг. 3 и 4, и сопоставление этих событий с их корректными парами для формирования LoR на основе окна совпадения и временной отметки с высоким разрешением, связанной с таким событием.
Если каждый чувствительный элемент в большой системе обнаружения для выполнения сопоставления событий выдает каждое событие на один принимающий компьютер обработки, это может привести к превышению возможностей передачи данных в сети и возможностей обработки одной машины. Соответственно, варианты осуществления данного изобретения обеспечивают распараллеливание формирования LoR на нескольких компьютерах сбора данных (DAQ), каждый из которых выполнен с возможностью выполнения обработки отдельно. Для этого разделения используют знание геометрической исходной точки конца кандидата на LoR. Блок локального чувствительного элемента, обеспечивающий это обнаружение столкновений, будет выдавать свои данные только на один или несколько компьютеров DAQ, через конкретную сеть, в зависимости от возможных RoI, которым может принадлежать такая потенциальная конечная точка LoR. Компьютер сбора данных, который также принимает другой конец потенциальной LoR, может тестировать временное и геометрическое соответствие. Он может построить LoR и определить, к какому виртуальному ковшу, движущемуся по ленте, принадлежит эта LoR, и отправить ее на дальнейшую обработку в распараллеленную систему с помощью определенной независимой топологической сети. Также возможно использование управляющего аппаратного/микропрограммного/программного уровня, который способен определять RoI на уровне триггера LoR для более эффективного выполнения той же функции, которая описана выше (описанная выше методика внешнего блока триггера совпадений). Это ограничивает совпадения смежными чувствительными элементами или чувствительными элементами, которые идентифицированы как принадлежащие к одной и той же RoI, и для чувствительных элементов из относительно удаленных секций системы формирование LoR может оказаться невозможным. Таким образом, каждый компьютер DAQ может принимать события только от тех чувствительных элементов, которые расположены близко друг к другу, то есть с большой вероятностью находятся в одной и той же RoI.
Примеры разделения чувствительных элементов между компьютерами DAQ показаны на Фиг. 5 и 6. В контексте данного описания термин «компьютер» в понятии «компьютер DAQ» следует интерпретировать в широком смысле, и он может относиться к одному или нескольким процессорам, одной или нескольким компьютерным системам, серверу, кластеру компьютеров и т.п.
На Фиг. 5 показана детекторная плоскость 40, то есть массив чувствительных элементов, который разделен на три RoI 42, 44, 46. Каждая RoI 42, 44, 46 включает в себя набор 3×4 отдельных детекторных блоков и ассоциирована с конкретным компьютером DAQ (обозначенным DAQ1, DAQ2 и DAQ3 на Фиг. 5). Следует понимать, что для формирования всей рассматриваемой RoI каждый набор 3×4 может быть спарен с соответствующим набором 3×4, расположенным в противоположной плоскости, например, выше или ниже него, или каким-либо иным образом.
На Фиг. 6 показан другой пример детекторной плоскости 48. Плоскость 48 разделена на шесть RoI - 50, 52, 54, 56, 58, 60. Каждая RoI 50, 52, 54, 56, 58, 60 включает в себя набор 3×3 отдельных детекторных блоков и ассоциирована с конкретным компьютером DAQ (обозначенным DAQ1, DAQ2, DAQ3, DAQ4, DAQ5 и DAQ6 на Фиг. 6).
Области интереса RoI на Фиг. 5 и 6 показаны как перекрывающиеся, поскольку блок триггера в некоторых вариантах осуществления может допускать совпадения между смежными чувствительными элементами. Соответственно, в наихудшем сценарии чувствительные элементы в углах перекрывающихся областей должны будут отправлять каждое событие на четыре разных компьютера DAQ, поскольку LoR может находиться в одной из четырех перекрывающихся областей DAQ.
Согласно вариантам осуществления изобретения, каждый чувствительный элемент в системах обнаружения может иметь два соединения. Одно может представлять собой двунаправленное соединение с блоками триггера совпадений 62.1, 62.2. В примере топологии 64 на Фиг. 7 эти двунаправленные соединения показаны пунктирными линиями. Эти соединения могут передавать сигналы от разных чувствительных элементов 66 параллельно, поэтому суммарная скорость передачи данных не становится проблематичной. Другой тип соединения может представлять собой однонаправленное соединение, через которое чувствительные элементы 66 отправляют данные о событиях на компьютеры DAQ, показанное сплошными стрелками на Фиг. 7.
Следует понимать, что в вариантах осуществления данного изобретения в состав системы обнаружения могут быть включены один или несколько блоков триггера совпадений. В некоторых случаях могут использоваться внутренние блоки триггера совпадений (т.е. составляющие часть детекторной установки), обладающие теми же функциональными возможностями, что и описанные здесь внешние блоки триггера совпадений.
Компьютеры DAQ, связанные с каждой RoI, могут отвечать за проверку событий и объединение пар одиночных событий столкновения (которые, как известно, должны иметь совпадающие парные столкновения) в события LoR для данной RoI, и каждый такой компьютер DAQ может представлять собой физически и/или логически разделенную топологическую сеть, систему или устройство для уменьшения скорости поступления данных во всей системе обнаружения до субскоростей в отдельных сетях, системах или устройствах.
Третий пример распараллеливания проиллюстрирован на рисунках 8 и 9 и относится к разделению на так называемые «движущиеся объемы».
Во многих случаях ни один узел обработки не сможет выполнить реконструкцию ПЭТ и обнаружение алмазов в реальном времени при проведении обнаружения для объемов практически целесообразной величины. Таким образом, некоторые варианты осуществления данного изобретения позволяют распараллеливать объемы и узлы обработки. Как было разъяснено со ссылкой на пример Фиг. 1, каждая частица породы может перемещаться через детекторную систему на конвейерной ленте. Реконструкция ПЭТ может быть распараллелена на объемы, которые привязаны к положению ленты, в отличие от формирования LoR, где привязка осуществляется относительно положений чувствительного элемента. RoI для породы, движущейся в потоке, можно рассматривать как имеющие сопутствующее перемещение, а также, в некоторых случаях, как перекрывающиеся «виртуальные контейнеры с породой».
Информация о метке времени и положении конечных точек каждой LoR может быть использована для расчета, какой именно объем(ы), имеющий привязку относительно ленты, она пересекает. Поток породы на ленте можно предварительно разделить на перекрывающиеся виртуальные контейнеры. Затем LoR ассоциируют, по меньшей мере, с одним конкретным совместно перемещающимся виртуальным контейнером. Пакет LoR для этого виртуального контейнера передают на узел, компьютер, процессор или вычислительную систему, названную «VOL», так как этот элемент относится к конкретному виртуальному контейнеру (объему) породы. Подмножество LoR в каждом объеме (виртуальном контейнере) затем может быть обработано собственным «VOL» для получения изображения ПЭТ, и это изображение ПЭТ может быть проанализировано, чтобы определить, имеется ли алмаз. При необходимости, ПЭТ-изображения из различных «VOL» могут быть объединены в более крупное изображение.
Такая обработка, по мере необходимости, может быть передана для выполнения путем дальнейшей сегментации с целью улучшения таких показателей, как скорость.
Вариант реализации сетевой топологии 68, предусматривающий различные уровни разделения, включая разделение системы на движущиеся объемы, показан на Фиг. 8. В такой установке чувствительные элементы 72 обмениваются данными с блоком 70 триггера совпадений, как описано выше. Чувствительные элементы 72 отправляют данные о событиях в DAQ 76, каждый из которых отвечает за часть общей системы обнаружения. DAQ 76 отправляет LoR процессорам 80 объема с привязкой относительно ленты. В одном варианте осуществления каждый объема с привязкой относительно ленты обрабатывается одним узлом обработки (например, всего может быть шесть виртуальных контейнеров, как показано на Фиг. 8 с обозначениями от Vol1 по Vol6). Узел накапливает LoR пока объем, с которым он ассоциирован, анализируется чувствительными элементами 72. Как только объем выходит за пределы чувствительных элементов 72, узел переходит к ПЭТ-реконструкции и анализу наличия алмазов. После этого узел может быть использован повторно, и ему будет назначен новый объем, находящийся в начале системы обнаружения.
Если узким местом в передаче данных являются возможности сетевых коммутаторов 74, 78, могут быть созданы сети более сложной топологии, позволяющие передавать данные параллельно. Например, в топологии 82, показанной на Фиг. 9, возможное узкое место между чувствительными элементами 83 и компьютерами 84 DAQ устраняют путем группирования чувствительных элементов 83 в подсети с различными коммутаторами 86. Каждый из этих коммутаторов, в свою очередь, подключен к компьютерам 84 сбора данных (DAQ), которые отрабатывают формирование совпадений от чувствительных элементов 83, которые находятся в рамках каждой подсети. Если подсети сформированы из чувствительных элементов, которые расположены близко друг к другу, то каждая такая подсеть может нуждаться в подключении только к подмножеству компьютеров 84 DAQ. Кроме того, возможное узкое место между компьютерами 84 DAQ и процессорами 88 объемов с привязкой относительно ленты может быть устранено путем назначения наборов объемов различным коммутаторам 87. Каждый компьютер 84 DAQ может быть подключен к каждому из коммутаторов 87, как показано в примере на Фиг. 9.
Четвертый пример распараллеливания проиллюстрирован на Фиг. 10 и относится к дополнительному разделению узлов обработки, связанных с объемами, имеющими привязку к ленте. Топология 90 на Фиг. 10 аналогична топологии на Фиг. 9, при этом одинаковые позиции относятся к аналогичным компонентам.
Может оказаться полезным с помощью дополнительных коммутаторов 92 дополнительно разделить каждый объем с привязкой относительно ленты для нескольких узлов 94 обработки. Это позволяет каждому узлу 94 обработки обрабатывать относительно небольшой частичный объем «виртуального контейнера», чтобы помочь в реконструкции изображения, в то время как объемы с привязкой относительно ленты могут оставаться большими. Это может иметь, по меньшей мере, два преимущества: во-первых, в сети присутствует не так много объемов. Во-вторых, может быть снижено дублирование LoR. Дублирование может возникнуть, когда объемы с привязкой относительно ленты становятся меньше, поскольку каждая LoR потенциально может проходить через несколько объемов.
Как показано на Фиг. 10, каждый VOL 88 может быть снабжен дополнительным уровнем узлов обработки (например, узлами Р1.1 и Р1.2, которые обслуживают Vol1 через один из коммутаторов 92). Топология 90 на Фиг. 10 дополнительно отличается от топологии 82 на Фиг. 10 тем, что в топологии 82 каждый DAQ 84 подключен ко всем коммутаторам 87, в то время как в топологии 90 каждый DAQ 84 подключен к одному коммутатору 87, при этом между самими коммутаторами 87 предусмотрены взаимные соединения. Причина этого заключается в том, что конфигурация, показанная на Фиг. 9, не может быть масштабирована после определенной точки. Таким образом, может потребоваться добавить уровень взаимосвязи между коммутаторами 87. Хотя это может добавить этап к маршруту, который проходит каждая LoR, он, вероятно, будет более пригодным к масштабированию с точки зрения количества коммутаций между компьютерами DAQ и объемами с привязкой относительно ленты.
Топологии 64, 68, 82, 90 или их части могут составлять часть системы обнаружения, предназначенной для использования при обнаружении алмазов, например, системы обнаружения 10 на Фиг. 1.
Обратимся теперь к Фиг. 11 чертежей, где показано схематическое представление машины на примере компьютерной системы 100, в которой может быть выполнен набор команд, предписывающих машине осуществление любой одной или нескольких методик, рассмотренных в данном документе. В других примерных вариантах осуществления машина работает как автономное устройство или может быть подключена (например, по сети) к другим машинам. В сетевом примерном варианте осуществления машина может работать в качестве сервера или клиентской машины в сетевой среде сервер-клиент или как равноправная машина в одноранговой (или распределенной) сетевой среде. Машина может быть персональным компьютером (ПК), планшетным ПК, компьютерной приставкой к телевизору (STB), персональным цифровым помощником (PDA), сотовым телефоном, веб-устройством, сетевым маршрутизатором, коммутатором или шлюзом, или любым другим устройством, способным выполнять набор команд (последовательных или иных), которые определяют действия, подлежащие выполнению этой машиной. Кроме того, хотя для удобства показана только одна машина, термин «машина» также следует понимать как включающий в себя любую совокупность машин, включая виртуальные машины, которые индивидуально или совместно выполняют набор (или несколько наборов) команд для осуществления любой или нескольких методик, рассмотренных в данном документе.
В любом случае примерная компьютерная система 100 включает в себя процессор 102 (например, центральный процессор (CPU), графический процессор (GPU) или оба), основную память 104 и статическую память 106, которые обмениваются данными друг с другом через шину 108. Компьютерная система 100 может дополнительно включать в себя блок 110 отображения видео (например, жидкокристаллический дисплей (ЖКД) или электроннолучевую трубку (ЭЛТ)). Компьютерная система 100 также включает в себя устройство 112 буквенно-цифрового ввода (например, клавиатуру), устройство 114 навигации по интерфейсу пользователя (UI) (например, мышь или сенсорную панель), блок 116 дисковода, устройство 118 подачи сигнала (например, динамик) и устройство 120 сетевого интерфейса.
Дисковод 16 включает в себя энергонезависимый машиночитаемый носитель 122, хранящий один или несколько наборов команд и структур данных (например, программное обеспечение 124), реализующих любую одну или несколько методик или функций, описанных в данном документе, или используемых ими. Программное обеспечение 124 также может находиться, полностью или, по меньшей мере, частично в основной памяти 104 и/или в процессоре 102 во время его исполнения компьютерной системой 100, основной памятью 104 и процессором 102, также составляющими машиночитаемый носитель.
Программное обеспечение 124 дополнительно может быть передано или принято по сети 126 с помощью устройства 120 сетевого интерфейса с использованием любого из ряда широко известных протоколов передачи (например, HTTP).
Хотя машиночитаемый носитель 122 показан в примерном варианте осуществления как единственный носитель, термин «машиночитаемый носитель» может относиться к одиночному носителю или множеству носителей (например, централизованное или распределенное хранилище данных и/или связанные с ним буферная память и серверы), в которых хранятся один или несколько наборов команд. Термин «машиночитаемый носитель» также может рассматривать, как включающий в себя любой носитель, который способен хранить, кодировать или переносить набор команд для выполнения их машиной, который предписывает машине осуществлять одну или несколько методик по настоящему изобретению, или который способен хранить, кодировать или переносить структуры данных, используемые таким набором команд или связанные с ним. Соответственно, термин «машиночитаемый носитель» может включать в себя, но не ограничиваться ими, твердотельную память, оптические и магнитные носители, а также сигналы несущей волны.
Описанные здесь варианты осуществления могут обеспечить многочисленные преимущества. Например, за счет связывания чувствительных элементов только со смежными с ними, и, в частности, только с теми из них, которые расположены выше или ниже, или иным образом близко к ним в противоположной плоскости, может быть снижена скорость вывода данных и уменьшено количество ложных срабатываний (за счет управления геометрическими эффектами).
Детекторная установка может быть разделена на RoI, чтобы обеспечить трансляцию для обработки исключительно достоверные события или большинство таких событий. В сетевой топологии системы обнаружения может быть использовано распараллеливание, при котором каждый чувствительный элемент может направлять свои выходные данные в соответствующий топологический сегмент сети. Предусмотрено, что в некоторых реализациях совместное использование данных может осуществляться повторно, если будет обнаружено, что они также имеют отношение к другому топологическому сегменту сети. Часть данных также может обрабатываться в нескольких сегментах более одного раза. Это перекрытие данных сегментов детектора может быть допустимым, поскольку общая пропускная способность по сегментам все еще может быть увеличена.
Работа, которая должна быть выполнена системой обнаружения, может быть физически и/или логически разделена на разные этапы, чтобы обработка и передача данных происходили параллельно. Как описано выше, разделение может быть основано на положении чувствительных элементов (то есть разделении по инициированию совпадения или разделении по формированию LoR), в объемах, перемещающихся относительно детекторной установки, и/или на разделении системы обнаружения на отдельные и параллельные узлы обработки.
Варианты осуществления данного изобретения делают возможным сбор и обработку большего количества данных. В свою очередь, это может позволить обнаруживать относительно небольшие алмазы и выявлять алмазы в относительно крупных объектах, таких как крупные частицы кимберлита. Кроме того, описанные здесь методики распараллеливания могут позволить системе обнаружения работать на повышенном уровне пропускной способности.
Предполагается, что по меньшей мере некоторые из описанных здесь технологий и архитектур могут найти применение в сферах, не относящихся к обнаружению алмазов (или других благородных частиц). Например, по меньшей мере, некоторые из технологий и архитектур, описанных в данном документе, могут быть применены в ПЭТ-визуализации/обнаружении, применяемых телу или части тела человека или животного.

Группа изобретений относится к области обнаружения в объектах представляющих интерес частиц или веществ. Детекторная установка содержит по меньшей мере один массив чувствительных элементов, в котором чувствительные элементы выполнены с возможностью обнаружения фотонов, испускаемых объектом в результате аннигиляции позитронов. Каждый чувствительный элемент в массиве связан или ассоциирован с одним или несколькими другими чувствительными элементами в массиве, чтобы ограничить область интереса (Rol). Детекторная установка содержит блок триггера совпадений или соединена с ним с возможностью связи, при этом блок триггера совпадения выполнен с возможностью регистрировать или определять совпадение в ответ на прием сигналов обнаружения от двух разных чувствительных элементов, составляющих часть одной и той же Rol и указывающих на обнаружение, по существу, встречных коллинеарных и совпадающих фотонов в этой Rol. Технический результат – повышение чувствительности и точности обнаружения алмазов. 3 н. и 25 з.п. ф-лы, 11 ил.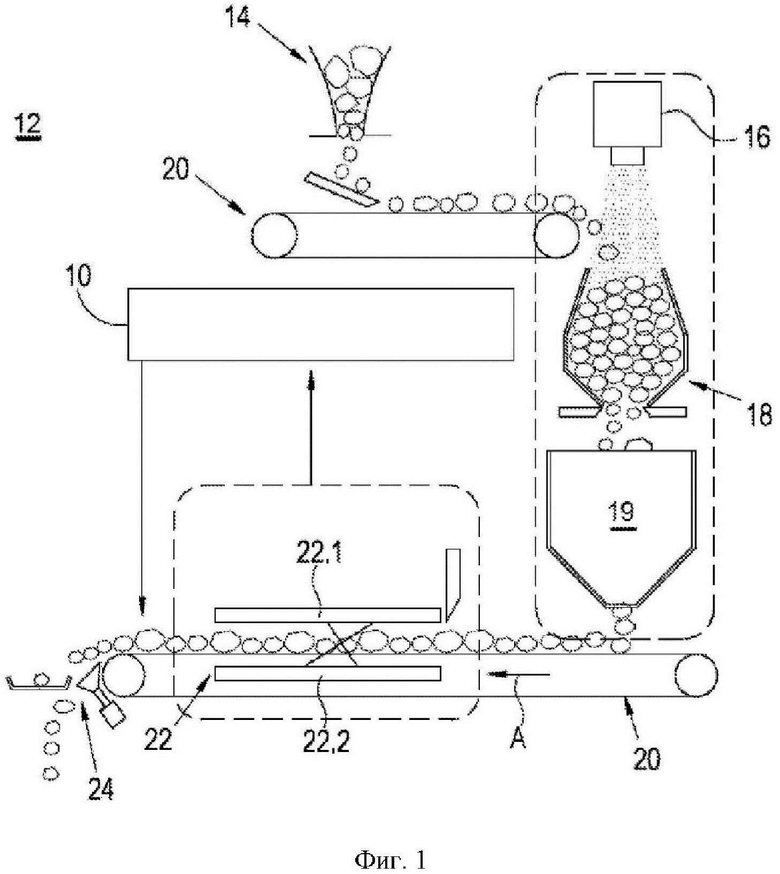
1. Детекторная установка, содержащая пару разнесенных в пространстве массивов чувствительных элементов, ориентированных, как правило, параллельно друг другу, в которой такие чувствительные элементы выполнены с возможностью обнаружения фотонов, испускаемых объектом, при этом каждый чувствительный элемент в одном из массивов связан или ассоциирован с одним или несколькими другими чувствительными элементами в другом одном из массивов для определения области интереса (RoI), при этом каждая RoI включает в себя подмножество чувствительных элементов в паре массивов, и при этом такая детекторная установка содержит блок триггера совпадений или соединена с ним с возможностью связи, который выполнен с возможностью регистрации или определения совпадения в ответ на прием сигналов обнаружения от двух разных чувствительных элементов, составляющих часть одной и той же RoI, указывающих на обнаружение, по существу, встречных коллинеарных и совпадающих фотонов в RoI.
2. Детекторная установка по п. 1, в которой предварительно заданная энергия может быть энергией, при которой из-за ядерной реакции между фотонами и углеродом возникает гигантский дипольный резонанс (GDR), что позволяет использовать такую детекторную установку для обнаружения алмаза в объекте.
3. Детекторная установка по п. 1, в которой фотонами являются фотоны гамма-излучения.
4. Детекторная установка по п. 1, в которой такая детекторная установка выполнена с возможностью обнаружения фотонов, имеющих уровень энергии приблизительно 511 кэВ, и отклонения фотонов, не имеющих уровня энергии, приближенного к 511 кэВ.
5. Детекторная установка по п. 1, в которой чувствительные элементы выполнены с возможностью обнаружения фотонов, испускаемых объектом в результате аннигиляции позитронов, возникающих из-за облучения объекта фотонами заданной энергии.
6. Детекторная установка по п. 1, в которой каждая область интереса (RoI) включает в себя по меньшей мере один чувствительный элемент из каждого массива чувствительных элементов, а блок триггера совпадений выполнен с возможностью регистрации совпадения в ответ на прием сигналов обнаружения от чувствительного элемента каждого массива чувствительных элементов, при условии, что чувствительные элементы расположены в одной и той же RoI.
7. Детекторная установка по п. 1, в которой каждая RoI включает в себя один чувствительный элемент из одного из массивов и множество чувствительных элементов из одного из других массивов.
8. Детекторная установка по п. 1, в которой блок триггера совпадений выполнен с возможностью, в ответ на регистрацию совпадения, передачи сигнала совпадения обратно к каждому из двух чувствительных элементов в качестве информации о срабатывании, указывающей на такое совпадение.
9. Детекторная установка по п. 8, в которой чувствительные элементы выполнены с возможностью передачи или выпуска данных о событии, относящихся к зарегистрированному сигналу совпадения, на отдельный компьютер для сбора данных (DAQ) в ответ на прием информации о срабатывании, указывающей на сигнал совпадения.
10. Система обнаружения, которая содержит:
детекторную установку, содержащую по меньшей мере один массив чувствительных элементов, при этом такие чувствительные элементы выполнены с возможностью обнаружения фотонов, испускаемых объектом, причем каждый чувствительный элемент в массиве связан или ассоциирован с одним или несколькими другими чувствительными элементами в массиве для ограничения области интереса (RoI), причем каждая RoI включает в себя подмножество чувствительных элементов массива;
блок триггера совпадений, образующий часть детекторной установки или соединенный с ней с возможностью связи, при этом блок триггера совпадения выполнен с возможностью регистрировать или определять совпадение в ответ на прием сигналов обнаружения от двух разных чувствительных элементов, составляющих часть одной и той же RoI и указывающих на обнаружение, по существу, встречных коллинеарных и совпадающих фотонов в RoI; и
множество компьютеров сбора данных (DAQ), выполненных с возможностью приема данных событий от детекторной установки, при этом данные события связаны с совпадением, зарегистрированным или определенным блоком триггера совпадений, при этом каждый компьютер DAQ выполнен с возможностью приема данных события только от чувствительных элементов, которые составляют часть одной или нескольких RoI, связанных с конкретным компьютером DAQ.
11. Система по п. 10, в которой фотоны, испускаемые объектом, являются результатом аннигиляции позитронов, возникающих из-за облучения объекта фотонами заданной энергии.
12. Система по п. 10, в которой данные о событии представляют собой необработанные выходные данные детекторной установки, а каждый компьютер DAQ выполнен с возможностью определять линию отклика (LoR), исходя из необработанных выходных данных детекторной установки.
13. Система по п. 12, в которой LoR соответствует воображаемой линии, проходящей через объект и соединяющей столкновения с чувствительными элементами на противоположных сторонах объекта, причем эти столкновения соответствуют встречным коллинеарным и совпадающим фотонам, которые испускаются объектом или от объекта.
14. Система по п. 10, в которой детекторная установка выполнена с возможностью выполнять обнаружение в потоке объектов, проходящем через детекторную установку.
15. Система по п. 14, в которой система обнаружения выполнена с возможностью разделения потока объектов на виртуальные контейнеры, причем каждая LoR ассоциирована с по меньшей мере одним виртуальным контейнером.
16. Система по п. 15, в которой каждый компьютер DAQ выполнен с возможностью передачи LoR в компьютер или подсистему обработки объема, выполненную с возможностью обработки только тех LoR, которые относятся к одному или нескольким конкретным виртуальным контейнерам, при этом компьютер или подсистема обработки объема выполнена с возможностью формирования изображения позитронно-эмиссионной томографии (ПЭТ) на основе LoR, ассоциированных с конкретным виртуальным контейнером.
17. Система по п. 15, в которой виртуальные контейнеры имеют привязку в координатах движущейся ленты.
18. Система по п. 15, в которой компьютеры DAQ имеют привязку в координатах детектора.
19. Система по п. 15, в которой компьютеры DAQ не имеют привязки к виртуальным контейнерам, но обрабатывают непрерывную вереницу виртуальных контейнеров.
20. Система по п. 15, в которой система обнаружения содержит множество узлов обработки, ассоциированных с каждым виртуальным контейнером и/или каждым компьютером или подсистемой обработки объема так, что каждый узел обработки оперативно обрабатывает суб-объем объема, ассоциированного с каждым виртуальным контейнером.
21. Способ обработки данных от детекторной установки, в котором детекторная установка включает в себя по меньшей мере один массив чувствительных элементов, причем такой способ содержит:
связывание или ассоциирование каждого чувствительного элемента в массиве с одним или несколькими другими чувствительными элементами в массиве для определения области интереса (RoI), причем каждая RoI включает в себя подмножество чувствительных элементов в массиве;
обнаружение, с помощью массива чувствительных элементов, фотонов, испускаемых объектом,
прием блоком триггера совпадений сигналов обнаружения от по меньшей мере двух чувствительных элементов;
регистрацию или определение совпадения, если блок триггера совпадений принимает сигналы обнаружения от двух разных чувствительных элементов, образующих часть одной и той же RoI и указывающих на обнаружение в RoI, по существу, встречных коллинеарных и совпадающих фотонов;
передачу блоком триггера совпадений в каждый из двух чувствительных элементов информации триггера, указывающей на сигнал совпадения, в ответ на регистрацию или определение совпадения; и
передачу или выдачу двумя чувствительными элементами на один из множества компьютеров сбора данных (DAQ) данных о событиях, относящихся к зарегистрированному совпадению.
22. Способ по п. 21, в котором фотон, испускаемый объектом, является результатом аннигиляции позитрона, возникающего из-за облучения объекта фотонами заданной энергии.
23. Способ по п. 21, в котором RoI могут перекрываться, поэтому подмножества чувствительных элементов, которые образуют RoI, не являются взаимоисключающими подмножествами.
24. Способ по п. 21, в котором детекторная система содержит способность выявлять информацию RoI, относящуюся к каждой конечной точке LoR.
25. Способ по п. 21, в котором чувствительный элемент в детекторной установке, который был инициирован как обнаруживший по меньшей мере одну из двух совпадающих конечных точек LoR, выдает информацию об этой конечной точке в одну или несколько отдельных систем на следующем уровне (DAQ).
26. Способ по п. 25, в котором, если существует неоднозначность относительно того, какой именно чувствительный элемент RoI мог принять партнерскую конечную точку LoR, этот блок будет выдавать данные более чем в один уровень DAQ.
27. Способ по п. 26, в котором геометрическая часть критериев достоверности LoR будет определена на уровне DAQ, и LoR может быть сформирована правильно.
28. Способ по п. 21, в котором чувствительные элементы детекторной установки обладают интеллектуальными функциями, позволяющими выпускать их данные в независимую сеть компьютеров DAQ разной топологии, за счет этого достигая разделения сигналов по разным сетям.
| СПОСОБ ЛЕЧЕНИЯ РЕГМАТОГЕННОЙ ОТСЛОЙКИ СЕТЧАТКИ | 2008 |
|
RU2360656C1 |
| S | |||
| Ballestrero, F | |||
| Bornman et al.: "Mineral-PET: Kimberlite sorting by nuclear-medical technology", 2010, pp | |||
| Прибор для переработки спирта в газовую смесь для двигателей внутреннего сгорания | 1920 |
|
SU589A1 |
| ОБНАРУЖЕНИЕ АЛМАЗОВ | 2005 |
|
RU2334974C2 |
| WO 2018200493 A1, 01.11.2018. | |||

