Область техники, к которой относится настоящее изобретение
Настоящее изобретение относится, в общем, к обнаружению целевых частиц или веществ в объектах, что эквивалентно получению высококачественных трехмерных (3D) изображений объекта, представляющего интерес. В частности, настоящее изобретение относится к устройству обнаружения и системе обнаружения. Настоящее изобретение также относится к способу динамического позиционирования устройства обнаружения с целью уменьшения артефактов изображения.
Предшествующий уровень техники настоящего изобретения
Во время выполнения стандартных операций по добыче алмазов для их извлечения необходимо затратить огромный объем ресурсов, таких как вода и энергия, которые расходуются на переработку большей частью пустой породы. Переработка породы обычно предусматривает последовательность разрушительных операций по дроблению породы и извлечению алмазов, часто с относительно небольшим выходом, например, около одного карата в расчете на тонну переработанной породы. Однако дробление породы обычным способом может привести к размалыванию алмазов, что снижает рентабельность месторождения алмазов.
Технологии на базе сенсоров или детекторов пытаются купировать эти нежелательные последствия за счет обеспечения возможности раннего обнаружения относительно непереработанных алмазоносных пород, которые затем могут быть отделены и переработаны экологически приемлемым способом с сохранением целостности алмазов.
Одна из технологий предшествующего уровня техники, основанная на применении детекторов, использует позитронно-эмиссионную томографию (PET), обеспечивающую возможность обнаружения алмазов в породе. Этот подход предусматривает облучение породы пучком гамма-лучей тормозного излучения, например, электронов с энергией 40 МэВ или другого источника фотонов, отличного от источника тормозного излучения, например, методом обратного рассеяния Комптона или другими методами. В течение нескольких минут порода возвращается к средним уровням удельной активности, и к этому времени РЕТ-изотопы будут отображать преобладающую остаточную активность. Когда преобладающую активность отображает PET-изотоп 11С, спустя примерно 30 минут, то порода проверяется с помощью устройства обнаружения с тем, чтобы определить, присутствует ли в ней алмаз или нет.
Классификационные данные, генерируемые во время применения указанного подхода, обычно увязаны с фотонами, которые детектируются устройством обнаружения. Эти фотоны испускаются породой вследствие позитронной аннигиляции в толще породы. Самым распространенным результатом аннигиляции является формирование по существу коллинеарных непрерывно следующих фотонов гамма-лучей с энергией 511 кэВ. Каждый фотон проходит через окружающий материал, иногда попутно меняя свою энергию и направление движения. Когда фотоны доходят до устройства обнаружения, это устройство может выдавать классификационные данные в виде данных о событиях попадания/падения фотонов на детектор.
Устройство обнаружения, используемое при построении изображения алмаза методом PET, может содержать пару детекторных матриц, например, расположенных, соответственно, над и под конвейерной лентой, транспортирующей породу, эффективно зажимая ленту и перемещающуюся на ней породу. Матрица может характеризоваться наличием верхней детекторной плоскости, которая состоит из множества отдельных чувствительных элементов, и нижней детекторной плоскости, которая состоит из множества отдельных чувствительных элементов. Обычно чувствительные элементы могут быть выполнены в виде сцинтиллирующих кристаллов и фотоэлектронных умножителей с соответствующей электроникой.
Обычно два непрерывно следующих фотона должны детектироваться по существу одновременно в противолежащих плоскостях устройства обнаружения, формируя линию ответа (LoR). Линия LoR соответствует воображаемой линии, которая проходит через породу, связывая попадания на чувствительные элементы, располагающиеся на противоположных сторонах объекта, с попаданиями, которые соответствуют непрерывно следующим коллинеарным и совпадающим фотонам, которые испускаются породой.
Детекторные матрицы обычно дискретизируются на пиксели с фиксированными геометрическими характеристиками, согласующимися с геометрией ленты, которая транспортирует породу. Каждый пиксель спарен или сопряжен с одним чувствительным элементом, т.е. с одним фотоэлектронным умножителем.
При реконструкции PET-изображения артефакты изображения могут возникать вследствие дискретизации, указанной выше. Чувствительные элементы обычно не обладают способностью определения, в каком месте данного пикселя произошло событие. Фактически, как показывает опыт авторов изобретения, события обычно переотображаются так, как будто они могут произойти только в заданном множестве дискретных позиций, расположенных по центру пикселей. Поскольку позиция в периодической матрице с верхней плоскости отображается на позицию в периодической матрице на нижней плоскости, множество всех возможных линий ответа (LoR), связывающих чувствительные элементы, образует регулярные структуры. В результате при реконструкции РЕТ-изображения может сформироваться регулярная структура с более яркими или менее яркими пятнами. Позиции с более высокой яркостью лежат на прямых путях, соединяющих центры многих пар чувствительных элементов. Позиции с более низкой яркостью располагаются между этими позициями с более высокой яркостью и не на многих прямых путях.
В свете вышеизложенного исходные точки в позициях с более высокой яркостью могут обладать повышенной эффективностью в части генерирования возможных линий LoR в системе обнаружения. Это может привести к систематическим искажениям получаемых в итоге изображений.
В волновых системах при интерференции двух разных волн области с более высокой яркостью, обусловленные усиливающей интерференцией, называются «узлами», тогда как области с низкой яркостью, обусловленные ослабляющей интерференцией, называются «междоузлиями». Аналогичным образом в устройстве обнаружения «узлами» могут называться позиции с более высокой яркостью, а «междоузлиями» могут называться позиции с более низкой яркостью.
Как показывает опыт авторов изобретения, это искажение/эффект не ограничен конкретным методом реконструкции РЕТ-изображений, а является скорее результатом фиксированных геометрических параметров детекторных матриц и/или переотображения событий на центр пикселей. Таким образом, указанное искажение/эффект может проявляться, по меньшей мере, в определенной степени вне зависимости от применяемого метода реконструкции.
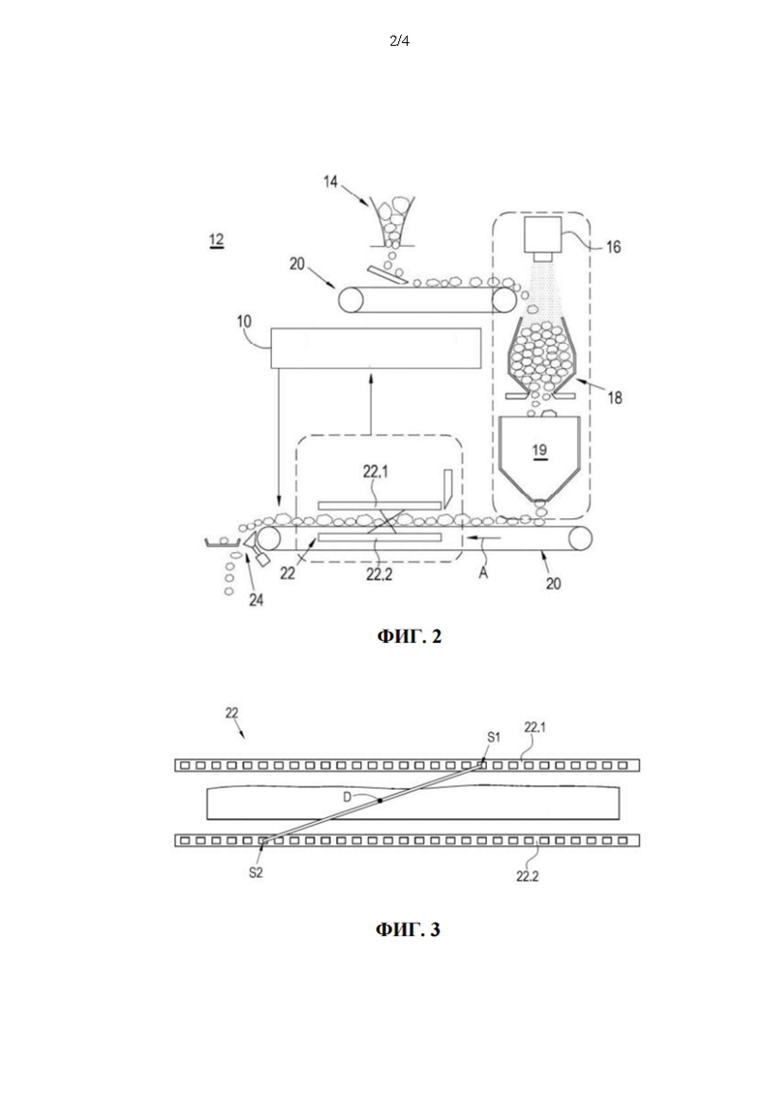
К примеру, на фиг.1 показана детекторная матрица 2 с пятью верхними пикселями и пятью нижними пикселями, которые располагаются вдоль оси X. Эти пиксели обычно выстроены параллельно направлению движения (по оси X) потока объектов (например, породы), изображение которых должно быть построено. На фиг.1 показаны все возможные линии 4 LoR между верхней детекторной плоскостью 6 и нижней детекторной плоскостью 8 детекторной матрицы 2.
Как можно видеть на фиг.1, наиболее выделяющиеся узлы и междоузлия расположены вдоль срединной линии «М» между двумя детекторными плоскостями 6 и 8 по оси X, где узлы «N» разделены половиной расстояния между центрами непосредственно примыкающих друг к другу пикселей «Р» детектора. Расстояние между центрами непосредственно примыкающих друг к другу пикселей будет называться далее по тексту «пиксельным расстоянием». Узлы над и под срединной линией «М» располагаются по отношению друг к другу с разными интервалами.
В качестве иллюстрации на фиг.1 представлена двухмерная визуализация структуры, сформированной всеми возможными линиями LoR. Следует понимать, что может быть сформирована более сложная структура узлов и междоузлий, если изображение строится в трех измерениях. Авторы изобретения установили, что при создании изображения характер и вид наблюдаемой структуры зависит от ряда факторов, таких как шаг пикселей, размер объемных элементов в трехмерном изображении и конкретный метод реконструкции изображения, используемый в процессе его построения.
Наличие этих «узлов» и «междоузлий» в реконструированном изображении может привести к ухудшению результативности, в частности, при построении изображений алмазов небольших размеров. Узлы могут обуславливать появление ярких пятен, которые могут быть ложно идентифицированы как алмазы. С другой стороны, если алмаз располагается в междоузлии, то определенный сигнал/некоторые сигналы, имеющие отношение к его обнаружению, могут быть эффективно распределены по ближайшим узлам, и алмаз может быть пропущен. Этот эффект может также привести к неточной оценке размеров алмаза.
Таким образом, существует потребность в уменьшении или устранении артефактов изображения (или их последствий), обусловленных конфигурациями чувствительных элементов, которые применяются при построении РЕТ-изображений. Варианты осуществления настоящего изобретения предлагают устройство, систему и/или способ устранения или уменьшения, по меньшей мере, некоторых из указанных проблем.
В контексте представленного описания термин «объект» может обозначать частицу породы, такой как кимберлит, вне зависимости от ее размера, или ряд частиц породы, или отдельный алмаз. Таким образом, термины «объект», «порода», «частица» и «кимберлит» в настоящем документе могут быть использованы взаимозаменяемо. Термин «объект» может также распространяться и на другие объекты, изображение которых строится, или которые анализируются в рамках способа обнаружения, например, на тело человека или животного или на часть тела.
Краткое раскрытие настоящего изобретения
Согласно одному из аспектов настоящего изобретения предложено устройство обнаружения, содержащее, по меньшей мере, одну матрицу чувствительных элементов или пикселей, причем указанная матрица содержит или разделена на множество подблоков или подматриц, а каждый подблок включает в себя множество чувствительных элементов, задающих подплоскость, причем чувствительные элементы выполнены с возможностью детектирования фотонов, испускаемых объектом, который располагается вдоль, по меньшей мере, первой оси, заданной плоскостью объекта, в результате ядерных реакций, происходящих внутри объекта, при этом один или оба элемента из числа объекта и матрицы чувствительных элементов выполнены функционально подвижными относительно друг друга, и при этом каждая подплоскость наклонена под индивидуальным углом или выполнена с возможностью наклона под индивидуальным углом ко второй оси и/или третьей оси, причем вторая ось проходит через плоскость объекта в поперечном направлении к первой оси, а третья ось проходит перпендикулярно первой оси в сторону от плоскости объекта.
Согласно другому аспекту настоящего изобретения предложено устройство обнаружения, содержащее, по меньшей мере, одну матрицу чувствительных элементов или пикселей, которые задают детекторную плоскость, причем чувствительные элементы выполнены с возможностью детектирования фотонов, испускаемых объектом, который располагается вдоль, по меньшей мере, первой оси, заданной плоскостью объекта, в результате ядерных реакций, происходящих внутри объекта, причем один или оба элемента из числа объекта и матрицы чувствительных элементов выполнены функционально подвижными относительно друг друга, при этом детекторная плоскость наклонена под углом или выполнена с возможностью наклона под углом ко второй оси и/или третьей оси, и при этом вторая ось проходит через плоскость объекта в поперечном направлении к первой оси, а третья ось проходит перпендикулярно первой оси в сторону от плоскости объекта.
Согласно еще одному из аспектов настоящего изобретения предложено устройство обнаружения, содержащее, по меньшей мере, одну матрицу чувствительных элементов или пикселей, которые задают детекторную плоскость, при этом чувствительные элементы выполнены с возможностью детектирования фотонов, испускаемых объектом в результате позитронной аннигиляции вследствие облучения объекта фотонами с заданной энергией, при этом объект функционально перемещается относительно матрицы вдоль первой оси, заданной плоскостью объекта, и при этом детекторная плоскость наклонена под углом или выполнена с возможностью наклона под углом ко второй оси и/или третьей оси, причем вторая ось проходит через плоскость объекта в поперечном направлении к первой оси, а третья ось проходит перпендикулярно первой оси в сторону от плоскости объекта.
В некоторых вариантах осуществления настоящего изобретения устройство обнаружения может быть выполнено с возможностью выполнения детектирования потока объектов, например, породы/частиц породы, проходящих через устройство обнаружения или минующих его. Этот поток может располагаться на транспортном приспособлении, например, на ленте.
Угол или углы детекторной плоскости ко второй оси и/или третьей оси могут быть выбраны таким образом, чтобы точка в плоскости объекта, проходящая через устройство обнаружения или минующая его, проходила, по меньшей мере, одно пиксельное расстояние, а в предпочтительном варианте несколько пиксельных расстояний горизонтальных размеров матрицы вдоль второй оси и/или вдоль третьей оси.
Продольное направление транспортного приспособления может задавать первую ось («ось X»), а поперечное направление транспортного приспособления может задавать вторую ось («ось Y»). Третья ось («ось Z») может проходить перпендикулярно первой оси и второй оси в направлении от транспортного приспособления к детекторной плоскости. Таким образом, детекторная плоскость, заданная матрицей, может быть наклонена под углом или наклонена относительно оси Y или оси Z, заданной транспортным приспособлением.
Плоскость объекта может быть задана поверхностью транспортирования транспортного приспособления. Первая ось может представлять собой направление перемещения потока объектов, проходящих через устройство обнаружения, например, вдоль длины ленты.
По меньшей мере, одна матрица чувствительных элементов может включать в себя пару отстоящих друг от друга детекторных матриц с их детекторными плоскостями, ориентированных, в общем, параллельно друг другу. Чувствительные элементы могут отстоять друг от друга на противолежащих сторонах транспортного приспособления, например, над и под лентой.
Каждая детекторная матрица может включать в себя или делиться на множество подблоков или подматриц. Каждый подблок или подматрица может включать в себя множество чувствительных элементов или пикселей, задающих подплоскость. Каждая подплоскость может быть индивидуально наклонена под определенным углом или наклонена относительно второй оси и/или третьей оси по существу так, как это описано выше.
Фотоны, испускаемые объектом, могут быть результатом позитронной аннигиляции, обусловленной облучением объекта фотонами с заданной энергией и/или введением радиоизотопов в объект любыми средствами. Последний из указанных двух вариантов особенно востребован в сферах применения настоящего изобретения при построении РЕТ-изображений медицинского назначения, где радиоизотопы вводятся/впрыскиваются в человеческие тела/тела животных.
В некоторых примерах осуществления настоящего изобретения, предназначенных для применения технологии, описанной в настоящем документе, в медицинских целях, источники когерентного тормозного излучения могут быть использованы для эффективной активации РЕТ-изотопов только гамма излучением без излучения электронов.
Фотоны могут представлять собой фотоны гамма-лучей. Фотоны могут подвергаться ядерному взаимодействию с углеродом, создавая радиоактивные изотопы и обеспечивая тем самым возможность использования устройства обнаружения для детектирования алмазов. Заданная энергия может представлять собой энергию, при которой во время ядерной реакции между фотонами и углеродом возникает гигантский дипольный резонанс (GDR), что позволяет эффективно активировать углерод. Устройство обнаружения может быть выполнено с возможностью детектирования фотонов, обладающих энергией на уровне около 511 кэВ, и отбрасывания фотонов, не обладающих энергией на уровне около 511 кэВ.
В некоторых примерах осуществления настоящего изобретения заданная энергия может выходить за пределы значения, при котором возникает GDR (или в большую, или в меньшую сторону). Резонанс GDR соотносится с максимальным сечением, но следует иметь в виду, что в других энергетических областях предусмотрено ненулевое сечение, и поэтому в некоторых сферах применения имеется возможность активации фотонами без использования GDR (с более высокой, или более низкой энергией).
Специалистам в данной области техники должно быть понятно, что вводимые или генерируемые изотопы могут варьироваться в зависимости от сферы применения изобретения, раскрытого в настоящем документе. Например, активация кислорода-15 (с периодом полураспада 2 минуты) при его применении в медицинских целях обеспечивает детектирование фотонов устройством обнаружения, описанным в настоящем документе, с возвращением тела человека/животного в «нормальное» состояние спустя всего несколько минут.
Следует отметить, что выходные данные устройства обнаружения, такие как данные чувствительных элементов, соотносимые с фотонами или характеризующие фотоны и/или соответствующие фотонам, которые детектируются устройством обнаружения, могут быть использованы для генерирования изображений объекта/объектов.
Согласно еще одному из аспектов настоящего изобретения предложено устройство обнаружения, содержащее, по меньшей мере, одну матрицу чувствительных элементов или пикселей, причем матрица включает в себя или разделена на множество подблоков или подматриц, а каждый подблок включает в себя множество чувствительных элементов, задающих подплоскость, причем чувствительные элементы выполнены с возможностью детектирования фотонов, испускаемых объектом в результате позитронной аннигиляции вследствие облучения объекта фотонами с заданной энергией, при этом объект функционально перемещается относительно матрицы вдоль первой оси, заданной плоскостью объекта, и при этом каждая подплоскость наклонена под индивидуальным углом или выполнена с возможностью наклона под индивидуальным углом ко второй оси и/или третьей оси, причем вторая ось проходит через плоскость объекта в поперечном направлении к первой оси, а третья ось проходит перпендикулярно первой оси в сторону от плоскости объекта.
Согласно еще одному из аспектов настоящего изобретения предложена система обнаружения, которая включает в себя:
устройство обнаружения, содержащее, по меньшей мере, одну матрицу чувствительных элементов или пикселей, задающих детекторную плоскость, причем чувствительные элементы выполнены с возможностью детектирования фотонов, испускаемых объектом в результате позитронной аннигиляции вследствие облучения объекта фотонами с заданной энергией; и
транспортное приспособление, выполненное с возможностью обеспечения перемещения объекта относительно матрицы вдоль первой оси, заданной плоскостью объекта;
при этом плоскость объекта наклонена под углом или выполнена с возможностью наклона под углом ко второй оси и/или третьей оси, причем вторая ось проходит через плоскость объекта в поперечном направлении к первой оси, а третья ось проходит перпендикулярно первой оси в сторону от плоскости объекта.
Согласно еще одному из аспектов настоящего изобретения предложена система обнаружения, которая включает в себя:
устройство обнаружения, содержащее, по меньшей мере, одну матрицу чувствительных элементов или пикселей, причем указанная матрица содержит или разделена на множество подблоков или подматриц, а каждый подблок включает в себя множество чувствительных элементов, задающих подплоскость, причем чувствительные элементы выполнены с возможностью детектирования фотонов, испускаемых объектом в результате позитронной аннигиляции вследствие облучения объекта фотонами с заданной энергией; и
транспортное приспособление, выполненное с возможностью обеспечения перемещения объекта относительно матрицы вдоль первой оси, заданной плоскостью объекта;
при этом каждая подплоскость наклонена под индивидуальным углом или выполнена с возможностью наклона под индивидуальным углом ко второй оси и/или третьей оси, причем вторая ось проходит через плоскость объекта в поперечном направлении к первой оси, а третья ось проходит перпендикулярно первой оси в сторону от плоскости объекта.
Согласно еще одному из аспектов настоящего изобретения предложена система переработки для месторождений алмазов, которая включает в себя устройство обнаружения и/или систему обнаружения, по существу аналогичную той, которая описана выше.
Согласно еще одному из аспектов настоящего изобретения предложен способ позиционирования устройства обнаружения с целью уменьшения артефактов изображения, причем этот способ предусматривает:
обеспечение наличия устройства обнаружения, по существу аналогичного тому, которое описано выше;
обеспечение наличия транспортного приспособления, которое позволяет объекту перемещаться относительно устройства обнаружения вдоль первой оси, заданной плоскостью объекта; и
позиционирование устройства обнаружения так, чтобы его детекторная плоскость или каждая подплоскость, если таковая предусмотрена, проходила под углом ко второй оси и/или третьей оси, причем вторая ось проходит через плоскость объекта в поперечном направлении к первой оси, а третья ось проходит перпендикулярно первой оси в сторону от плоскости объекта.
Позиционирование устройства обнаружения может предусматривать наклон или отклонение устройства обнаружения относительно транспортного приспособления таким образом, чтобы точка в плоскости объекта, проходящая через устройство обнаружения или минующая его, проходила, по меньшей мере, одно пиксельное расстояние, а в предпочтительном варианте - несколько пиксельных расстояний горизонтальных размеров матрицы вдоль второй оси и/или вдоль третьей оси.
Следует иметь в виду, что описанный способ может представлять собой динамический способ позиционирования устройства обнаружения.
Методы, разработанные для построения изображений алмазов с использованием PET, могут с равным успехом применяться в медицинских целях с использованием выходных данных чувствительных элементов. Пациенты, активируемые, например, путем введения радиоизотопов, могут проходить через детекторы вместо использования традиционной статической схемы, при которой пациент остается в одном положении, окруженный чувствительными элементами. Это обеспечивает преимущества, аналогичные тем, которые достигаются на месторождениях, в плане повышения производительности (в данном случае количества изображений пациента, получаемых в час) и обеспечения единообразия РЕТ-отклика для реконструкции изображения.
Специалистам в данной области техники должно быть понятно, что выходные данные устройства обнаружения, описанного в настоящем документе, могут быть использованы для генерирования трехмерных изображений более высокого качества.
Краткое описание фигур
На фиг.1 представлен концептуальный вид сбоку устройства обнаружения, где показаны все возможные линии LOR между верхней детекторной плоскостью и нижней детекторной плоскостью;
На фиг.2 представлено схематическое изображение одного из примеров системы переработки для месторождений алмазов, в которой могут быть реализованы варианты осуществления настоящего изобретения;
На фиг.3 проиллюстрирована кимберлитовая порода на движущейся ленте между детекторными плоскостями устройства обнаружения;
На фиг.4 показан концептуальный вид сверху первого примера осуществления устройства обнаружения согласно одному из вариантов осуществления настоящего изобретения;
На фиг.5 показан концептуальный вид сбоку второго примера осуществления устройства обнаружения согласно одному из вариантов осуществления настоящего изобретения; и
На фиг.6 показан концептуальный вид сбоку третьего примера осуществления устройства обнаружения согласно одному из вариантов осуществления настоящего изобретения.
Подробное раскрытие настоящего изобретения
Последующее описание заявленного изобретения представлено с тем, чтобы обеспечить возможность ознакомления с настоящим изобретением. Специалистам в соответствующей области техники должно быть понятно, что в описанные варианты осуществления может быть внесено множество изменений с достижением при этом положительных результатов настоящего изобретения. Также очевидно, что некоторые из желательных преимуществ настоящего изобретения могут быть достигнуты за счет выбора некоторых его признаков без использования других признаков. Соответственно, специалистам в данной области техники должно быть понятно, что модификации и изменения, вносимые в настоящее изобретения, возможны, а при определенных обстоятельствах могут быть даже желательны, и являются неотъемлемой частью настоящего изобретения. Таким образом, последующее описание предложено как иллюстрирующее принципы настоящего изобретения, но не ограничивающее его.
Следует иметь в виду, что фразы «например», «такой как» и их производные описывают варианты осуществления предмета изобретения, раскрытые в настоящем документе, которые не носят ограничительного характера. Ссылки в описании на «один из примеров осуществления», «еще один пример осуществления», «некоторые примеры осуществления» или на их производные означают, что конкретный признак, структура или характеристика, описанная в привязке к вариантам/варианту осуществления настоящего изобретения, включена, по меньшей мере, в один вариант осуществления раскрытого в настоящем документе предмета изобретения. Таким образом, использование фраз «один из примеров осуществления», «еще один пример осуществления», «некоторые примеры осуществления» или их производные не обязательно относится к одному и тому же варианту/вариантам осуществления настоящего изобретения.
Если не указано иное, то некоторые признаки предмета изобретения, раскрытого в настоящем документе, которые описаны в контексте отдельных вариантов осуществления с целью исключения двусмысленного толкования, также могут быть представлены в сочетании в одном единственном варианте осуществления настоящего изобретения. Аналогичным образом различные признаки предмета изобретения, раскрытого в настоящем документе, которые описаны в контексте одного единственного варианта осуществления, могут быть также представлены по отдельности или в любой подходящей подкомбинации.
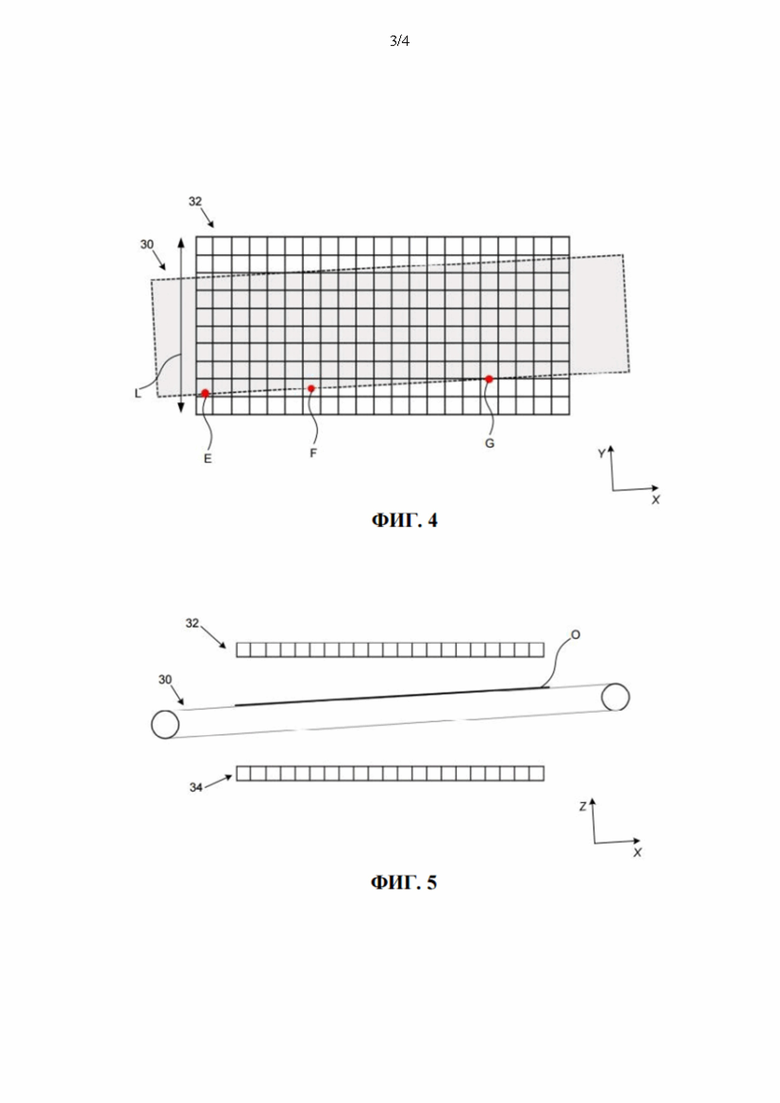
Как показано на фиг.2, один из примеров осуществления системы переработки для месторождений алмазов обозначен, в общем, ссылочной позицией 12. Обнаружение алмазов будет использовано в представленном описании в качестве одного из примеров реализации вариантов осуществления настоящего изобретения. Однако следует иметь в виду, что альтернативные варианты осуществления заявленного изобретения распространяются и на другие типы детектирования и сферы формирования изображений в большом объеме и с высокой скоростью, например, построения/детектирования РЕТ-изображений применительно к телу человека или животного (например, медицинской РЕТ-томографии всего тела и РЕТ-видео).
Система 12 обычно включает в себя блок 10 классификации или обнаружения, который обычно представляет собой автоматизированный блок или систему, выполненную с возможностью формирования изображений и обнаружения алмазов в виде индивидуальных отдельных объектов, в виде включений в объекты-хозяева, или в виде объектов, включенных в массивы других объектов.
Система 12 переработки для месторождений алмазов может быть установлена на месторождении алмазов или рядом с ним, и она может содержать пригодное для использования стандартное горнодобывающее оборудование, такое как дробилка 14, предназначенная для дробления горной массы до частиц размерами около 160 мм в диаметре или меньше. Система 12 дополнительно содержит пригодный для использования излучатель 16, предназначенный для облучения дробленой породы фотонами. Фотоны, которые облучают породу, могут исходить из пучков гамма-лучей тормозного излучения электронов с энергией около 40 МэВ. Вместо этого или в дополнение эти фотоны могут порождаться обратным рассеянием Комптона, плазменным ускорителем кильватерного поля и тому подобным. Фотоны предпочтительно обладают энергией, при которой возникает гигантский дипольный резонанс (GDR) вследствие ядерной реакции между фотонами и углеродом в породе. Было установлено, что наиболее эффективная активация может быть обеспечена, если энергия фотонов настроена на GDR. Однако следует понимать, что фотоны по-прежнему взаимодействуют с ядрами углерода с другими энергиями.
Система 12 включает в себя засыпной аппарат 18, 19, предназначенный для удержания породы во время ее облучения и для удержания облученной породы в течение заданного периода времени. Облученная порода возвращается к средним уровням конкретной активности в течение нескольких минут, и к этому времени РЕТ-изотопы будут отображать преобладающую остаточную активность. В этой связи засыпной аппарат 18, 19 выполнен с возможностью удержания облученной породы в течение времени удержания, составляющего от двадцати до тридцати минут, в течение которого РЕТ-изотоп 11С отображает преобладающую активность. После этого засыпной аппарат 18, 19 может автоматически выгрузить породу по истечении времени ее удержания.
Засыпной аппарат 18, 19 может включать в себя облучаемый бункер 18 и удерживающий бункер 19 (как это показано на фиг.2). В этом случае облучающий бункер 18 выполнен с возможностью удержания породы во время ее облучения излучателем 16, а удерживающий бункер 19 выполнен с возможностью удержания активированного материала в течение заданного периода времени, например, около 30 минут. Облучающий бункер 18 может принимать самые разные формы в зависимости от варианта практической реализации; например, он может включать в себя вертикальный желоб или три горизонтальные конвейерные ленты.
Система 12 включает в себя транспортное приспособление 20, содержащее подходящие конвейерные ленты, которые не ослабляют РЕТ-фотоны при транспортировке породы в системе 12 в автоматическом режиме. Транспортное приспособление 20 может быть выполнено с возможностью транспортировки породы в виде каменной россыпи с постоянной заданной скоростью в системе 12, например, 1 м в секунду.
Система также содержит устройство 22 обнаружения, которое располагается за засыпным аппаратом 18, 19, примыкая к транспортному приспособлению 20, в частности, его ленте, для детектирования испускаемых им РЕТ-фотонов. Направление движения породы через устройство 22 обнаружения обозначено стрелкой, помеченной литерой «А» на фиг.2. Это направление движения, проходящее по длине ленты 20, может быть задано в качестве первой оси или оси X, что подробнее будет описано ниже.
В одном из примеров осуществления настоящего изобретения, как это показано на фиг.2 и 3, устройство 22 обнаружения может содержать пару детекторных матриц 22.1 и 22.2, которые располагаются над и под лентой, соответственно, эффективно зажимая ленту и перемещающуюся на ней породу.
Матрица 22.1 может состоять из множества отдельных чувствительных элементов/пикселей, задающих верхнюю детекторную плоскость, а матрица 22.2 может состоять из множества отдельных чувствительных элементов/пикселей, задающих нижнюю детекторную плоскость. В одном из примеров осуществления настоящего изобретения устройство 22 обнаружения содержит чувствительные элементы, пригодные для детектирования фотонов. В этой связи чувствительные элементы устройства 22 могут быть представлены в виде сцинтиллирующих кристаллов и фотоэлектронных умножителей (РМТ) с соответствующей электроникой.
Система 12 также включает в себя подходящее сортировальное устройство 24, которое может представлять собой механическое сортировальное устройство 24 с электронным управлением, выполненное с возможностью отделения потенциально алмазоносной породы или, иными словами, алмазосодержащей породы или отдельных алмазов от пустой породы или, иными словами, породы, не содержащей алмазы.
Блок 10 обнаружения коммуникативно связан с устройством 22 обнаружения для приема классификационных данных с устройства 22 обнаружения и генерирования соответствующих управляющих сигналов для управления сортировальным устройством 24 с целью отделения алмазоносной породы от пустой породы. В этой связи важно, чтобы блок 10 мог обработать классификационные данные с достаточной скоростью с тем, чтобы можно было вовремя передать сигнал (данные) активации на сортировальное устройство 24.
Сортировальное устройство 24 может быть выполнено с возможностью разделения алмазов или алмазоносной породы на одну или несколько категорий в соответствии с одним или несколькими конкретными свойствами обнаруженного алмаза/алмазоносной породы в противоположность ее простого отделения от пустой породы.
Блок 10 может быть соединен с устройством 22 обнаружения и/или сортировальным устройством 24 путем прямого проводного подключения или беспроводным образом. В одном из примеров осуществления настоящего изобретения блок 10 коммуникативно соединен с устройством 22 посредством сети связи, которая может включать в себя сети связи одного или нескольких типов. В этом плане система связи может представлять собой одну или несколько таких систем, как Интернет, локальная вычислительная сеть (LAN), глобальная вычислительная сеть (WAN), городская вычислительная сеть (MAN), различные типы телефонных сетей (например, телефонная коммутируемая сеть общего пользования (PSTN) с технологией цифровой абонентской линией (DSL)) или сети мобильной связи (например, глобальная система мобильной связи (GSM), система пакетной радиосвязи общего пользования (GPRS), система множественного доступа с кодовым разделением каналов (CDMA) и другие пригодные для использования технологии сетей мобильной связи) или любые комбинации перечисленных систем. Соответственно, из этого следует, хотя это не обязательно может оказаться практически реализуемым вариантом, что в некоторых примерах осуществления настоящего изобретения блок 10 не обязательно должен находиться на площадке производства работ, а может находиться на удалении от этой площадки. В некоторых вариантах осуществления настоящего изобретения устройство 22 может образовывать часть блока 10. В некоторых вариантах осуществления настоящего изобретения устройство 22 и лента 20 вместе могут образовывать систему обнаружения, тогда как блок 10 задан как система классификации.
Блок 10 выполнен с возможностью приема/запрограммирован на прием классификационных данных и определения того, может ли потенциально объект быть алмазом или представлять собой алмазоносный объект, путем обработки принимаемых классификационных данных. Классификационные данные обычно соотносятся с фотонами, детектированными устройством 22, которые испускаются объектом в результате позитронной аннигиляции в облучаемом объекте, поступившем из засыпного аппарата 18, 19. В частности, как показано на фиг.3, когда PET-изотоп в кимберлитовой породе высвобождает позитрон вследствие бета-распада, этот позитрон аннигилирует с ближайшим электроном, пройдя короткий путь, который может охватывать множество актов рассеяния. Чаще всего результатом этой аннигиляции является выработка по существу коллинеарных непрерывно следующих фотонов гамма-лучей с энергией 511 кэВ. После этого каждый фотон проходит через окружающий материал, иногда попутно меняя свою энергию и направление движения. Когда фотоны доходят до матриц 22.1 и 22.2 устройства обнаружения в точках S1 и S2, устройство 22 обнаружения выдает классификационные данные в виде данных о событии попадания/падения фотона на детектор, которые включают в себя, например, данные, указывающие на местоположение падения фотона на матрицы 22.1 и 22.2, энергию фотона и отметку времени. Это позволяет определить или рассчитать позицию алмаза (см. «D» на фиг.3).
Как было указано в приведенном выше разделе «Предшествующий уровень техники настоящего изобретения», детекторные матрицы, такие как матрицы 22.1 и 22.2, обычно дискретизируются на пиксели с фиксированными геометрическими характеристиками, согласующимися с геометрией ленты 20, которая транспортирует породу. Каждый пиксель спарен или сопряжен с одним чувствительным элементом. Чувствительные элементы обычно не обладают способностью определения, в каком месте данного пикселя произошло событие, и события обычно переотображаются так, как будто они могут произойти только в заданном множестве дискретных позиций, расположенных по центру пикселей. Поскольку позиция в периодической матрице с верхней плоскости отображается на позицию в периодической матрице на нижней плоскости, множество всех возможных линий ответа (LoR), связывающих чувствительные элементы, образует регулярные структуры, как было описано выше в привязке к фиг.1. В результате при реконструкции РЕТ-изображения может сформироваться регулярная структура с более яркими или менее яркими пятнами («узлами» и «междоузлиями»), как было описано выше. Это может привести к возникновению артефактов изображения.
Авторы изобретения установили, что для уменьшения артефактов изображения при РЕТ-детектировании могут быть применены определенные принципы теории выборки, особенно при обнаружении алмазов. В теории выборки во временной области дискретизация выборок предусматривает максимальную частоту отсечки. Если рассматриваемый сигнал ограничен шириной полосы частот, а скорость дискретизации в два раза превышает предельную ширину полосы частот, то дискретизация не приводит к возникновению артефактов, а частота дискретизации называется «частотой Найквиста».
Если невозможно производить выборку, по меньшей мере, с частотой Найквиста, то может быть использован статистический метод «супердискретизации». Этот метод предусматривается объединение множества серий выборок (K), частота каждой из которых меньше частоты Найквиста. Выборки в серии выборок при супердискретизации должны быть некоррелированными. На практике выборки будут идти дискретно с интервалом времени, который превышает частоту Найквиста; и, следовательно, они будут независимы друг от друга. Можно доказать, что их объединение (интегрирование) приводит к улучшению  отношения «сигнал-шум».
отношения «сигнал-шум».
Этот метод супердискретизации во временной области, который предусматривает смещение независимых выборок в пределах интервала основного времени выборки, может быть применен для РЕТ-реконструкции в пространственной области. Если зафиксировать кадр измерения на движущемся потоке породы, изображение которой должно быть построено, стробоскопически зафиксировав положение ленты с введением поправки на скорость ее движения, то можно проанализировать четкость отдельной линии LoR. Например, может быть проанализирована перпендикулярная линия LoR, проходящая по оси Z (оси, перпендикулярной направлению движения ленты и проходящей между детекторными плоскостями), соединяя центры двух пикселей, вместе с другой немного смещенной, но также перпендикулярной линией LoR. По указанным выше причинам эти две линии LoR могут отображаться на одни и те же два пикселя, обычно при условии, что смещение dx меньше половины периода пикселей (Dx/2). Если проводятся серии измерений числом K с шаговым смещением позиции чувствительного элемента K раз в пределах размеров пикселя (Dx), то для исходной точки данной линии LoR будет предусмотрено разное распределение четкости, так как точная точка пересечения, в которой она отображается на следующий пиксель, будет зависеть от ее положения с разрешением Dx/K.
Таким образом, авторы изобретения установили, что с помощью метода супердискретизации можно повысить разрешение и по существу устранить неоднородную четкость исходных точек LoR. В практическом смысле этот подход может быть применен при построении РЕТ-изображений путем регулировки ориентации/угла наклона детекторных плоскостей относительно плоскости объекта, заданной поверхностью транспортирования ленты. Соответствующие примеры приведены ниже.
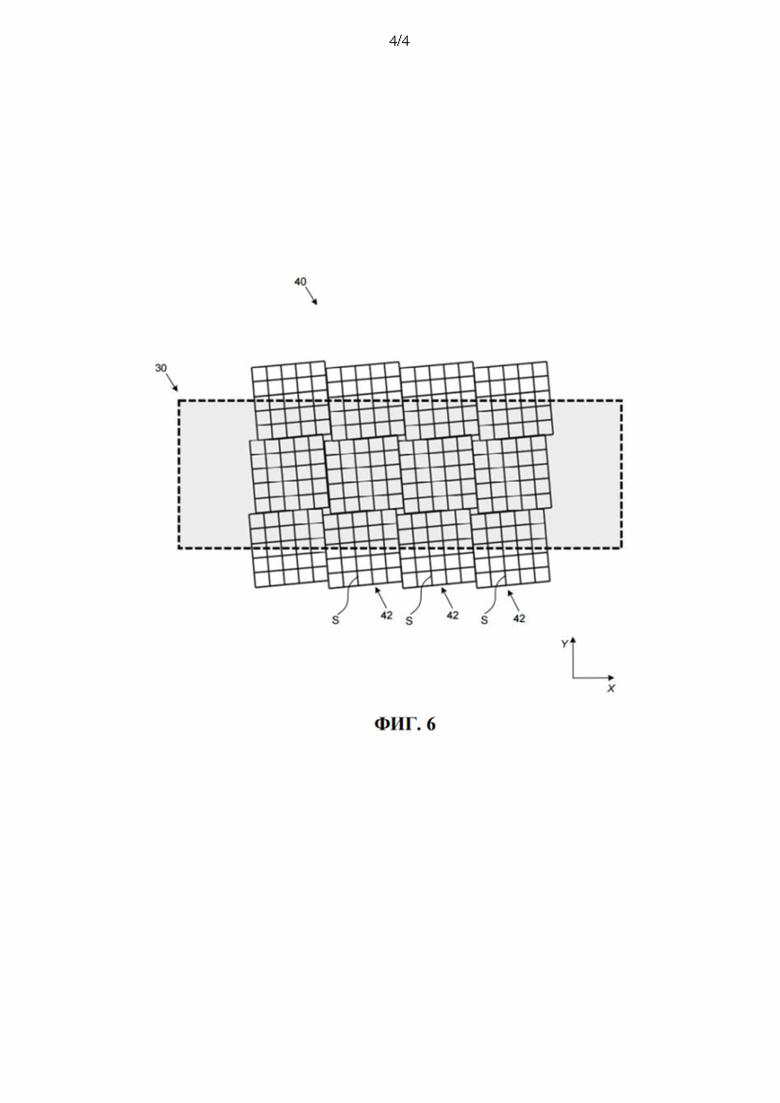
В рамках иллюстрации примеров, приведенных на фиг.4-6, задана система координат, где величина х обозначает направление, в котором движется конвейерная лента 30; величина у обозначает направление поперек ленты 30; а величина z обозначает направление, перпендикулярное ленте и проходящее от верхней детекторной плоскости 32/40 к нижней детекторной плоскости 34. Поверхность транспортирования, переносящая породу между плоскостями 32/40 и 34 (т.е. на которой объекты, изображение которых должно быть построено, функционально перемещаются относительно чувствительных элементов), называется «плоскостью объекта» (см. «О» на фиг.5).
Следовательно, направление х, проходящее по длине ленты 30, задает первую ось («ось X»); ширина ленты 30, т.е. направление у, проходящее через ленту 30, задает вторую ось («ось Y»); а третья ось («ось Z») проходит перпендикулярно оси X и оси Y в сторону от ленты 30, т.е. между детекторными плоскостями 32/40 и 34.
Если анализировать движение ленты 30 по оси X, то оно служит для сглаживания всех «узлов» и «междоузлий», которые могут быть образованы. Это может рассматриваться фактически в качестве «автоматической» супердискретизации, обусловленной обычной геометрической конфигурацией и движением в процессе РЕТ-томографии. В заданный момент времени точка на ленте 30 может лежать на линии (LoR), соединяющей два чувствительных элемента, или между разными линиями. По мере прохождения ленты 30 через структуру узлов и междоузлий каждая позиция на ленте занимает в узлах по существу столько же времени, сколько и в междоузлиях, и ни одна из позиций не имеет существенного положительного или отрицательного смещения. Эквивалентно каждая линия LoR под определенным углом со временем пройдет через каждый пиксель в почти сплошной цепочке позиций, в результате чего пересечение ею границ пикселей будет происходить с точностью, превышающей дискретизацию на уровне пикселя. Фиксация чувствительным элементом конечных точек LoR после их увязки с поправкой на скорость фактически будет подвергнута процессу супердискретизации. В случае интегрирования, о котором идет речь выше, это обеспечивает итоговое распределение, которой становится не связанным (по меньшей мере, в определенной степени) с первоначальной дискретизацией.
Вдоль оси Y могут наблюдаться артефакты, если детекторные плоскости 32 и 34 точно совпадают с движением ленты. Иначе говоря, это может иметь место, если две оси, заданные плоскостями 32 и 34, совпадают с осью X и осью Y, заданными лентой 30, или проходят параллельно этим осям. Например, если заданное положение ленты 30 по оси Y находится между двумя детекторными позициями по оси Y, то она останется между этими детекторными позициями на всем пути своего перемещения вдоль плоскости О объекта между детекторными плоскостями 32 и 34. Для достижения аналогичного сглаживания узлов и междоузлий, которое наблюдается в направлении х, может быть предусмотрен поворот/наклон под определенным углом устройства обнаружения относительно ленты 30, как это показано на фиг.4.
Рассмотрим точку на ленте 30 с детекторной плоскостью 32, наклоненной под определенным углом к плоскости О объекта/ленте 30, как это показано на фиг.4. В позиции «Е» она располагается примерно посередине между двумя детекторными пикселями. В позиции «F» она располагается по центру пикселя. В положении «G» она располагается точно посередине между двумя пикселями. Следовательно, благодаря наличию угла между детекторными плоскостями 32 и 34 и лентой 30 каждая точка на ленте 30 может плавно проходить между узлами и междоузлиями, как и в случае «автоматического» перехода (без использования поворота) для направления х.
Угол детекторных плоскостей 32 и 34 относительно ленты 30 может быть выбран, исходя из пиксельного расстояния в соответствующих матрицах и общей длины устройства обнаружения, гарантируя, что каждая точка в плоскости О объекта при ее прохождении через плоскости 32 и 34 может проходить на своем пути несколько пиксельных расстояний горизонтального размера «L» плоскостей 32 и 34 (или матрицы) и/или несколько пиксельных расстояний вдоль оси Y. Следует понимать, что в иллюстративных целях размеры пикселей на фиг.4-6 преувеличены, и что на практике пиксели обладают существенно меньшими размерами, что приводит к перекрещиванию множества пиксельных расстояний на размере «L».
Аналогичный эффект может быть получен вдоль оси Z за счет поворота/наклона детекторных плоскостей 32 и 34 под определенным углом к ленте вокруг оси Y (в противоположность наклону под определенным углом к оси Z, описанному в привязке к фиг.4), как это показано на фиг.5. В этом случае каждая точка на ленте 30 будет проходить несколько пиксельных расстояний по оси Z, плавно проходя между узлами и междоузлиями.
Как следует из примеров, приведенных на фиг.4 и 5, когда устройство обнаружения или отдельные детекторные плоскости отклонены/наклонены под определенным углом к ленте спереди и сзади чувствительного элемента, лента оказывается смещенной относительно середины детекторных плоскостей. В результате области, которые находятся относительно далеко от центра ленты, могут не обеспечивать требуемый охват обнаружения и, следовательно, могут характеризоваться низким уровнем отклика чувствительных элементов. Для устранения этой потенциальной проблемы может быть предусмотрен наклон/отклонение детекторных подблоков или подматриц, как это показано на фиг.6.
В примере, приведенном на фиг.6, каждая детекторная плоскость (показана только верхняя детекторная плоскость 40) разделена на 12 подблоков 42. Чувствительные элементы или пиксели этих подблоков задают «подплоскости» (см. «S» на фиг.6). В этом примере отдельные подплоскости 42 повернуты относительно ленты 30 вокруг оси Z (следует понимать, что в альтернативном варианте или дополнительно они могут быть повернуты вокруг оси Y). Кроме того, подблоки 42 смещены относительно друг друга, вследствие чего пиксели не совпадают там, где сходятся подблоки 42. Это обеспечивает возможность перемещения точки на плоскости О объекта на ленте 30 между разными относительными пиксельными позициями без введения большого результирующего поворота для детекторной плоскости 40, так что лента 30 остается вблизи центра детекторной плоскости 40.
Устройства обнаружения, описанные в привязке к фиг.4-6, могут применяться в системе переработки и/или обнаружения, такой как система 12, описанная в привязке к фиг.2.
Соответственно, настоящим документом предложено устройство обнаружения, система обнаружения и способ позиционирования устройства обнаружения. За счет наклона детекторных плоскостей к плоскости объекта, на которой объекты, изображение которых должно быть построено, может быть уменьшено или устранено присутствие пятен с более высокой или более низкой яркостью на итоговом изображении. Методы, обозначенные выше, позволяют уменьшить артефакты изображения за счет эффективного использования движения транспортного приспособления (например, ленты) без необходимости введения какого-либо другого движения, например, вибрации ленты.
Таким образом, может быть сокращено количество ложных (ложно-положительных) идентификаций алмазов и/или количество пропущенных алмазов, что может привести к повышению рентабельности работ.
Предусмотрено, что, по меньшей мере, некоторые методики и конфигурации, описанные в настоящем документе, могут найти свое применение в сферах, отличных от обнаружения алмазов (или иных драгоценных частиц). К примеру, по меньшей мере, некоторые из методик и конфигураций, описанных в настоящем документе, могут использоваться при построении/детектировании РЕТ-изображений применительно к телу или части тела человека или животного. Следует иметь в виду, что в сфере применения изобретения, описанного в настоящем документе, в медицинских целях транспортное приспособление может быть выполнено в виде съемной подложки или платформы или замещаемой системы обнаружения, которая выполнена с возможностью пространственного перемещения тела человека/животного или его части в плоскости объекта относительно устройства обнаружения. В этой связи пространственное перемещение может предусматривать движение в первом направлении и/или во множестве направлений, включая первое направление. Например, в одном из вариантов осуществления настоящего изобретения подложка или платформа может перемещать объект вперед и назад в первом направлении в пределах плоскости объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДЕТЕКТОРНАЯ УСТАНОВКА, СИСТЕМА ОБНАРУЖЕНИЯ И СПОСОБ ОБРАБОТКИ ДАННЫХ, ПОЛУЧЕННЫХ ОТ ДЕТЕКТОРНОЙ УСТАНОВКИ, ОБЕСПЕЧИВАЮЩИЙ ВЫСОКУЮ ПРОПУСКНУЮ СПОСОБНОСТЬ ПРИ ОБРАЩЕНИИ С ДАННЫМИ | 2019 |
|
RU2807250C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ОБНАРУЖЕНИЯ АЛМАЗОВ В КИМБЕРЛИТЕ И СПОСОБ ПРЕДВАРИТЕЛЬНОГО ОБОГАЩЕНИЯ АЛМАЗОВ С ИХ ПРИМЕНЕНИЕМ | 2015 |
|
RU2623692C2 |
| РЕНТГЕНОГРАФИЧЕСКИЙ СЕПАРАТОР МИНЕРАЛОВ | 2019 |
|
RU2715374C1 |
| УСОВЕРШЕНСТВОВАННАЯ ТЕМПЕРАТУРНАЯ КОМПЕНСАЦИЯ И СХЕМА УПРАВЛЕНИЯ ДЛЯ ОДНОФОТОННЫХ СЧЕТЧИКОВ | 2010 |
|
RU2518589C2 |
| ОБНАРУЖЕНИЕ АЛМАЗОВ | 2005 |
|
RU2334974C2 |
| СИСТЕМЫ ОБНАРУЖЕНИЯ | 2008 |
|
RU2460098C2 |
| СПОСОБ МАГНИТОРЕЗОНАНСНОЙ ТОМОГРАФИИ (MRI) ДЛЯ НАЗНАЧЕНИЯ ИНДИВИДУАЛЬНЫМ ПИКСЕЛАМ ИЛИ ВОКСЕЛАМ СПЕЦИФИЧЕСКИХ ДЛЯ ТКАНИ ЗНАЧЕНИЙ ОСЛАБЛЕНИЯ ПОЗИТРОННО-ЭМИССИОННОЙ ТОМОГРАФИИ (РЕТ) | 2013 |
|
RU2608975C2 |
| НЕДОРОГОСТОЯЩАЯ КОНСТРУКЦИЯ ЦИФРОВОГО ПЭТ (ПОЗИТРОННОГО ЭМИССИОННОГО ТОМОГРАФА) | 2015 |
|
RU2705758C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ИЗМЕРЕНИЯ РАСХОДА И СОСТАВА МНОГОФАЗНОЙ ФЛЮИДНОЙ СМЕСИ | 2011 |
|
RU2565346C2 |
| ВИРТУАЛЬНЫЙ ДЕТЕКТОР РЕТ И СХЕМА КВАЗИПИКСЕЛИРОВАННОГО СЧИТЫВАНИЯ ДЛЯ РЕТ | 2008 |
|
RU2473099C2 |

Использование: для обнаружения целевых частиц/веществ в объектах и для получения высококачественных трехмерных (3D) изображений указанного объекта. Сущность изобретения заключается в том, что устройство обнаружения содержит матрицу чувствительных элементов, задающих детекторную плоскость, причем эти элементы детектируют фотоны, испускаемые объектом, который располагается, по меньшей мере, вдоль первой оси, заданной плоскостью объекта, в результате ядерных реакций, протекающих в объекте. Объект и/или матрица выполнены подвижными относительно друг друга, а детекторная плоскость наклонена под определенным углом/выполнена с возможностью наклона под определенным углом ко второй оси и/или третьей оси. Вторая ось проходит через плоскость объекта в поперечном направлении к первой оси, а третья ось проходит перпендикулярно первой оси. Технический результат: обеспечение возможности уменьшения артефактов изображения. 6 н. и 41 з.п. ф-лы, 6 ил.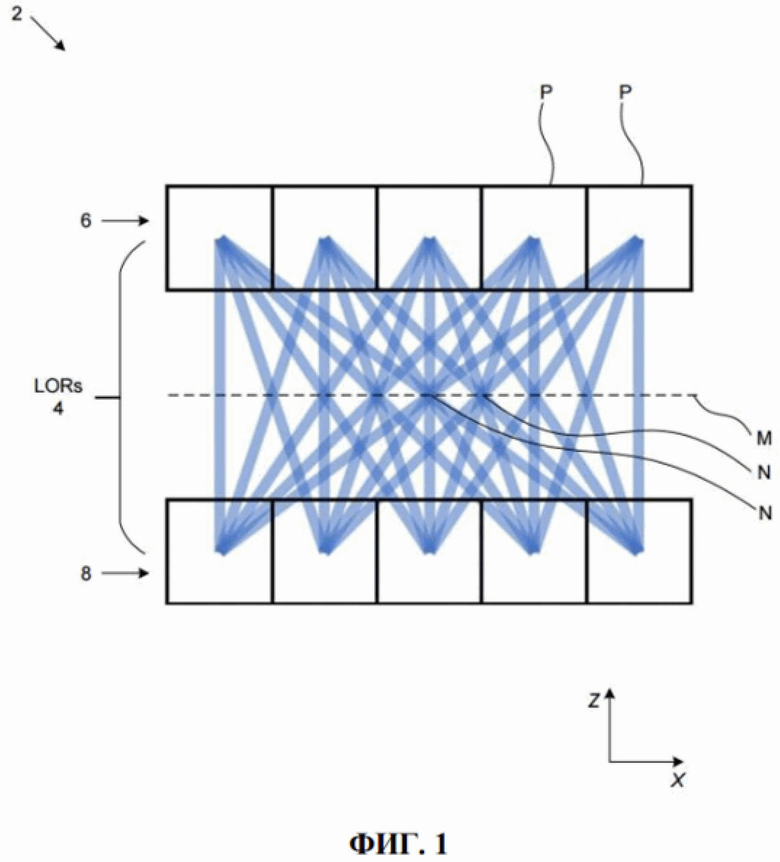
1. Устройство обнаружения целевых частиц или веществ в объектах, содержащее, по меньшей мере, одну матрицу чувствительных элементов или пикселей, задающих детекторную плоскость, причем чувствительные элементы выполнены с возможностью детектирования фотонов, испускаемых объектом, который располагается вдоль, по меньшей мере, первой оси, заданной плоскостью объекта, в результате ядерных реакций, протекающих в объекте, при этом один или оба элемента из числа объекта и матрицы чувствительных элементов выполнены функционально подвижными относительно друг друга, причем детекторная плоскость наклонена под углом или выполнена с возможностью наклона под углом ко второй оси и/или третьей оси, и причем вторая ось проходит через плоскость объекта в поперечном направлении к первой оси, а третья ось проходит перпендикулярно первой оси в сторону от плоскости объекта.
2. Устройство обнаружения по п. 1, в котором один или оба элемента из числа объекта и матрицы выполнены с возможностью перемещения относительно первой оси.
3. Устройство обнаружения по п. 1 или 2, в котором объект функционально перемещается относительно матрицы вдоль первой оси, заданной плоскостью объекта.
4. Устройство обнаружения по п. 1, в котором устройство обнаружения выполнено с возможностью выполнения детектирования потока объектов, проходящих через устройство обнаружения или минующих его.
5. Устройство обнаружения по п. 4, в котором поток объектов располагается на транспортном приспособлении, которое перемещает объекты относительно устройства обнаружения.
6. Устройство обнаружения по п. 1, в котором устройство обнаружения выполнено с возможностью выполнения детектирования, по меньшей мере, одного объекта или части объекта, перемещающегося относительно устройства обнаружения в плоскости объекта, по меньшей мере, вдоль первой оси.
7. Устройство обнаружения по п. 1, в котором, по меньшей мере, один объект или часть объекта располагается на транспортном приспособлении, которое перемещает, по меньшей мере, один объект или часть объекта, по меньшей мере, вдоль первой оси в пределах плоскости объекта.
8. Устройство обнаружения по п. 1, в котором, по меньшей мере, один объект или часть объекта располагается на транспортном приспособлении, которое перемещает, по меньшей мере, один объект или часть объекта вдоль множества осей в пределах плоскости объекта.
9. Устройство обнаружения по п. 1, в котором угол или углы детекторной плоскости относительно второй оси и/или третьей оси выбираются таким образом, что точка в плоскости объекта при ее перемещении относительно устройства обнаружения проходит, по меньшей мере, одно пиксельное расстояние горизонтальных размеров матрицы вдоль второй оси и/или вдоль третьей оси.
10. Устройство обнаружения по п. 5, в котором продольное направление транспортного приспособления задает первую ось, т.е. ось X, а поперечное направление транспортного приспособления задает вторую ось, т.е. ось Y, причем третья ось, т.е. ось Z, проходит перпендикулярно первой оси и второй оси от транспортного приспособления до детекторной плоскости.
11. Устройство обнаружения по п. 10, в котором детекторная плоскость, заданная матрицей, наклонена под определенным углом или отклонена относительно оси Y или оси Z, заданной транспортным приспособлением.
12. Устройство обнаружения по п. 5, в котором плоскость объекта задана поверхностью транспортирования транспортного приспособления.
13. Устройство обнаружения по п. 4 или 5, в котором первая ось совпадает с направлением прохождения потока объектов через устройство обнаружения или проходит параллельно указанному направлению.
14. Устройство обнаружения по п. 1, в котором, по меньшей мере, одна матрица чувствительных элементов включает в себя пару разнесенных относительно друг друга детекторных матриц, детекторные плоскости которых ориентированы, в общем, параллельно друг другу.
15. Устройство обнаружения по п. 14, в котором чувствительные элементы разнесены относительно друг от друга, располагаясь на противоположных сторонах транспортного приспособления.
16. Устройство обнаружения по п. 1, в котором детекторная матрица включает в себя или разделена на множество подблоков или подматриц, причем каждый подблок или подматрица включает в себя множество чувствительных элементов или пикселей, задающих подплоскость.
17. Устройство обнаружения по п. 16, в котором каждая подплоскость наклонена под индивидуальным углом или отклоняется относительно второй оси и/или третьей оси.
18. Устройство обнаружения по п. 1, в котором фотоны, испускаемые объектом, являются результатом введения радиоизотопов в объект и/или являются результатом ядерных реакций, протекающих в объекте вследствие облучения объекта фотонами гамма-лучей с заданной энергией, при которой в объекте генерируются радиоактивные изотопы, что обеспечивает возможность использования устройства обнаружения для детектирования одной или нескольких целевых частиц в пределах объекта.
19. Устройство обнаружения по п. 18, в котором одна или несколько частиц, представляющих интерес, представляют собой алмазы и/или живые клетки.
20. Устройство обнаружения по п. 1, в котором заданная энергия фотонов, при которой возникает гигантский дипольный резонанс (GDR) вследствие ядерной реакции между фотонами и углеродом, обеспечивает надлежащую активацию углерода.
21. Устройство обнаружения по п. 1, отличающееся тем, что это устройство обнаружения выполнено с возможностью детектирования фотонов с энергией на уровне около 511 кэВ и отбрасывания фотонов, не обладающих энергией на уровне около 511 кэВ.
22. Устройство обнаружения целевых частиц или веществ в объектах, содержащее, по меньшей мере, одну матрицу чувствительных элементов или пикселей, причем эта матрица включает в себя или разделена на множество подблоков или подматриц, а каждый подблок включает в себя множество чувствительных элементов, задающих подплоскость, причем чувствительные элементы выполнены с возможностью детектирования фотонов, испускаемых объектом, который располагается вдоль, по меньшей мере, первой оси, заданной плоскостью объекта, в результате ядерных реакций, протекающих в объекте, при этом один или оба элемента из числа объекта и матрицы чувствительных элементов выполнены функционально подвижными относительно друг друга, и при этом каждая подплоскость наклонена под индивидуальным углом или выполнена с возможностью наклона под индивидуальным углом ко второй оси и/или третьей оси, причем вторая ось проходит через плоскость объекта в поперечном направлении к первой оси, а третья ось проходит перпендикулярно первой оси в сторону от плоскости объекта.
23. Устройство обнаружения по п. 22, в котором один или оба элемента из числа объекта и матрицы выполнены с возможностью перемещения относительно первой оси.
24. Устройство обнаружения по п. 22 или 23, в котором объект функционально перемещается относительно матрицы вдоль первой оси, заданной плоскостью объекта.
25. Устройство обнаружения по п. 22, отличающееся тем, что это устройство обнаружения выполнено с возможностью выполнения детектирования потока объектов, проходящих через устройство обнаружения или минующих его.
26. Устройство обнаружения по п. 25, в котором поток объектов располагается на транспортном приспособлении, которое перемещает эти объекты относительно устройства обнаружения.
27. Устройство обнаружения по п. 22, отличающееся тем, что это устройство обнаружения выполнено с возможностью выполнения детектирования, по меньшей мере, одного объекта или части объекта, перемещающейся относительно устройства обнаружения в плоскости объекта, по меньшей мере, вдоль первой оси.
28. Устройство обнаружения по п. 22, в котором, по меньшей мере, один объект или часть объекта располагается на транспортном приспособлении, которое перемещает, по меньшей мере, один объект или часть объекта, по меньшей мере, вдоль первой оси в плоскости объекта.
29. Устройство обнаружения по п. 22, в котором, по меньшей мере, один объект или часть объекта располагается на транспортном приспособлении, которое перемещает, по меньшей мере, один объект или часть объекта вдоль множества осей в плоскости объекта.
30. Устройство обнаружения по п. 22, в котором угол или углы детекторных подплоскостей относительно второй оси и/или третьей оси выбираются таким образом, что точка в плоскости объекта при ее перемещении относительно устройства обнаружения проходит, по меньшей мере, одно пиксельное расстояние горизонтальных размеров матрицы вдоль второй оси и/или вдоль третьей оси.
31. Устройство обнаружения по п. 26, в котором продольное направление транспортного приспособления задает первую ось, т.е. ось X, а поперечное направление транспортного приспособления задает вторую ось, т.е. ось Y, причем третья ось, т.е. ось Z, проходит перпендикулярно первой оси и второй оси от транспортного приспособления до подплоскостей.
32. Устройство обнаружения по п. 31, в котором детекторные подплоскости, заданные подматрицами, наклонены под определенным углом или отклоняются относительно оси Y или оси Z, заданной транспортным приспособлением.
33. Устройство обнаружения по п. 26, в котором плоскость объекта задана поверхностью транспортирования транспортного приспособления.
34. Устройство обнаружения по п. 25 или 26, в котором первая ось совпадает с направлением прохождения потока объектов через устройство обнаружения или параллельно указанному направлению.
35. Устройство обнаружения по п. 22, в котором фотоны, испускаемые объектом, являются результатом введения радиоизотопов в объект и/или ядерных реакций, протекающих в объекте вследствие облучения объекта фотонами гамма-лучей с заданной энергией, при которой в объекте генерируются радиоактивные изотопы, что обеспечивает возможность использования устройства обнаружения для детектирования одной или нескольких целевых частиц в пределах объекта.
36. Система обнаружения целевых частиц или веществ в объектах, включающая в себя:
устройство обнаружения по п. 1; и
транспортное приспособление, выполненное с возможностью обеспечения возможности смещения объекта относительно матрицы вдоль, по меньшей мере, первой оси, заданной плоскостью объекта.
37. Система обнаружения по п. 36, в которой транспортное приспособление содержит конвейерную ленту, выполненную с возможностью функционального перемещения объекта относительно устройства обнаружения в направлении, которое совпадает с первым направлением или проходит параллельно ему.
38. Система обнаружения по п. 36, в которой транспортное приспособление содержит платформу или подложку, выполненную с возможностью пространственного смещения в пределах плоскости объекта.
39. Система обнаружения по п. 38, в которой платформа или подложка выполнена с возможностью перемещения объекта, по меньшей мере, в направлении движения, совпадающего с первой осью или параллельного ей.
40. Система переработки для месторождений алмазов, содержащая устройство обнаружения по п. 1 или систему обнаружения по п. 36.
41. Система позитронно-эмиссионной томографии медицинского назначения, содержащая устройство обнаружения по п. 1 или систему обнаружения по п. 36.
42. Способ позиционирования устройства обнаружения целевых частиц или веществ в объектах для уменьшения артефактов изображения, причем этот способ предусматривает:
обеспечение наличия устройства обнаружения по п. 1;
обеспечение наличия транспортного приспособления, которое позволяет объекту перемещаться или смещаться относительно устройства обнаружения, по меньшей мере, вдоль первой оси, заданной плоскостью объекта; и
позиционирование устройства обнаружения так, чтобы его детекторная плоскость или каждая подплоскость, если таковая предусмотрена, проходила под углом ко второй оси и/или третьей оси, причем вторая ось проходит через плоскость объекта в поперечном направлении к первой оси, а третья ось проходит перпендикулярно первой оси в сторону от плоскости объекта.
43. Способ по п. 42, в котором позиционирование устройства обнаружения предусматривает наклон под определенным углом или отклонение устройства обнаружения относительно транспортного приспособления таким образом, что точка в плоскости объекта, проходящая через устройство обнаружения или минующая его, проходит, по меньшей мере, одно пиксельное расстояние горизонтальных размеров матрицы вдоль второй оси и/или вдоль третьей оси.
44. Способ по п. 43, в котором точка в плоскости объекта, проходящая через устройство обнаружения или минующая его, проходит несколько пиксельных расстояний горизонтальных размеров матрицы вдоль второй оси и/или вдоль третьей оси.
45. Способ по п. 42, отличающийся тем, что этот способ предусматривает введение радиоизотопов в объект.
46. Способ по п. 42, отличающийся тем, что этот способ предусматривает облучение объекта фотонами гамма-лучей с заданной энергией для инициирования ядерной реакции внутри объекта вследствие взаимодействия фотонов гамма-лучей и химических элементов в объекте.
47. Способ по п. 42, отличающийся тем, что этот способ предусматривает сбор данных с устройства обнаружения и генерирование одного или нескольких изображений объекта.
| WO 2005088283 A1, 22.09.2005 | |||
| WO 2013033572 A2, 07.03.2013 | |||
| US 5339962 A, 23.08.1994 | |||
| СПОСОБ РЕНТГЕНОРАДИОМЕТРИЧЕСКОЙ СЕПАРАЦИИ МИНЕРАЛИЗОВАННОЙ МАССЫ | 1999 |
|
RU2154537C1 |
| СПОСОБ СЕПАРАЦИИ ЧАСТИЦ ПОЛЕЗНОГО МАТЕРИАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2517148C1 |
| СПОСОБ СЕПАРАЦИИ АЛМАЗОСОДЕРЖАЩИХ МАТЕРИАЛОВ | 2006 |
|
RU2322304C1 |

