Область техники
Изобретение в целом относится к инструментам, в частности, к сельскохозяйственным инструментам.
Предшествующий уровень техники
Инструменты, такие как сельскохозяйственные инструменты, используют для прицепления навесных приспособлений, в том числе высевающих секций, для высевания, удобрения, перемешивания почвы и так далее. Так как инструменты продолжают становиться шире, то они склонны обладать более длинными, жесткими секциями, которые не могут хорошо обработать неровные поля. Например, поле может содержать овраги и/или валы, которые нарушают способность высевающих секций надлежащим образом работать в поле. В качестве примера, когда сеялка встречает вал, колеса рамы инструмента поднимают высевающие секции вверх, от земли. Наоборот, когда колеса перемещаются вниз обратно по валу, рама всем весом опирается на высевающие секции. В любом случае возможные отрицательные результаты включают в себя недостаточную урожайность из-за слишком поверхностного или слишком глубокого посева семян.
Раскрытие изобретения
Один вариант осуществления изобретения содержит рамный элемент; навесной брус, связанный с рамным элементом, при этом навесной брус расположен параллельно и сзади рамного элемента; высевающую секцию, связанную с навесным брусом; и исполнительный механизм, присоединенный между рамным элементом и навесным брусом, при этом исполнительный механизм приспособлен для поворота навесного бруса на основе определенного положения навесного бруса.
Описаны определенные варианты осуществления системы с следующим рельефу навесным брусом и соответствующего способа, которые позволяют инструменту с высевающими секциями перемещаться по неровным полям с одновременным управлением взаимным расположением земли и навесного бруса высевающей секции, независимо от колес инструмента, установленных на раме. В одном варианте осуществления изобретения система с следующим рельефу навесным брусом содержит исполнительный механизм, присоединенный между рамным элементом и навесным брусом, при этом исполнительный механизм втягивают или выдвигают на основе положения навесного бруса, определенного одним или более датчиками, при этом навесной брус, в свою очередь, поддерживает контакт связанных высевающих секций (например, при посеве) с почвой, несмотря на рельеф поверхностей поля. В некоторых вариантах осуществления изобретения, система с следующим рельефу навесным брусом использует определенное положение навесного бруса для осуществления операций посева в поле, в том числе подъема и поворота в конце поля.
Немного отвлекаясь заметим, что почти все конструкции инструментов (например, сеялок) содержат навесной брус высевающих секций, который остается жестким при перемещении инструмента по рельефным поверхностям поля. Когда инструмент буксируют по валу, например, высевающая секция может подниматься над землей из-за используемых жестких структур, что приводит к поверхностному посеву или посеву на уровне поверхности. В других примерах, например, когда высевающая секция приближается к долине или оврагу, где тягач находится на большей высоте, высевающая секция может принять всю весовую нагрузку рамы, что приводит к чрезмерной глубине посева и возможному повреждению высевающей секции. В отличие от сказанного, определенные варианты выполнения системы с следующим рельефу навесным брусом активно управляют поворотом навесного бруса высевающей секции, приспосабливая поворот так, чтобы следовать за рельефом поверхностей поля и, следовательно, всегда пытаться сохранять контакт высевающих секций с землей (например, путем такого управления навесным брусом, что он находится в положении уровня относительно земли или, говоря по-другому, путем поддержания сравнительно постоянной высоты навесного бруса относительно земли).
Краткое описание чертежей
Многие аспекты системы с следующим рельефу навесным брусом согласно изобретению можно лучше понять при рассмотрении чертежей. Представленные на этих чертежах компоненты не обязательно изображены в масштабе; вместо этого основное внимание уделяется четкому пояснению принципов работы системы с следующим рельефу навесным брусом. Кроме того, на чертежах одинаковыми ссылочными позициями обозначены одинаковые или аналогичные детали.
На фиг. 1 схематично показан пример оборудования, в котором может быть использована система с следующим рельефу навесным брусом согласно примеру варианта осуществления;
на фиг. 2 – система с следующим рельефу навесным брусом согласно примеру варианта осуществления, при этом указанный навесной брус расположен в плоской конфигурации или в положении с нулевым углом, вид сбоку;
на фиг. 3 – система с следующим рельефу навесным брусом согласно примеру варианта осуществления, при этом навесной брус расположен в разных угловых положениях, вид сбоку с фрагментами;
на фиг. 4А – 4В – пример рельефов поля, которые активируют приведение в действие исполнительных механизмов, соответствующих системе с следующим рельефу навесным брусом согласно примеру варианта осуществления, виды сбоку с фрагментами;
на фиг. 5А – пример системы управления для системы с следующим рельефу навесным брусом согласно примеру варианта осуществления;
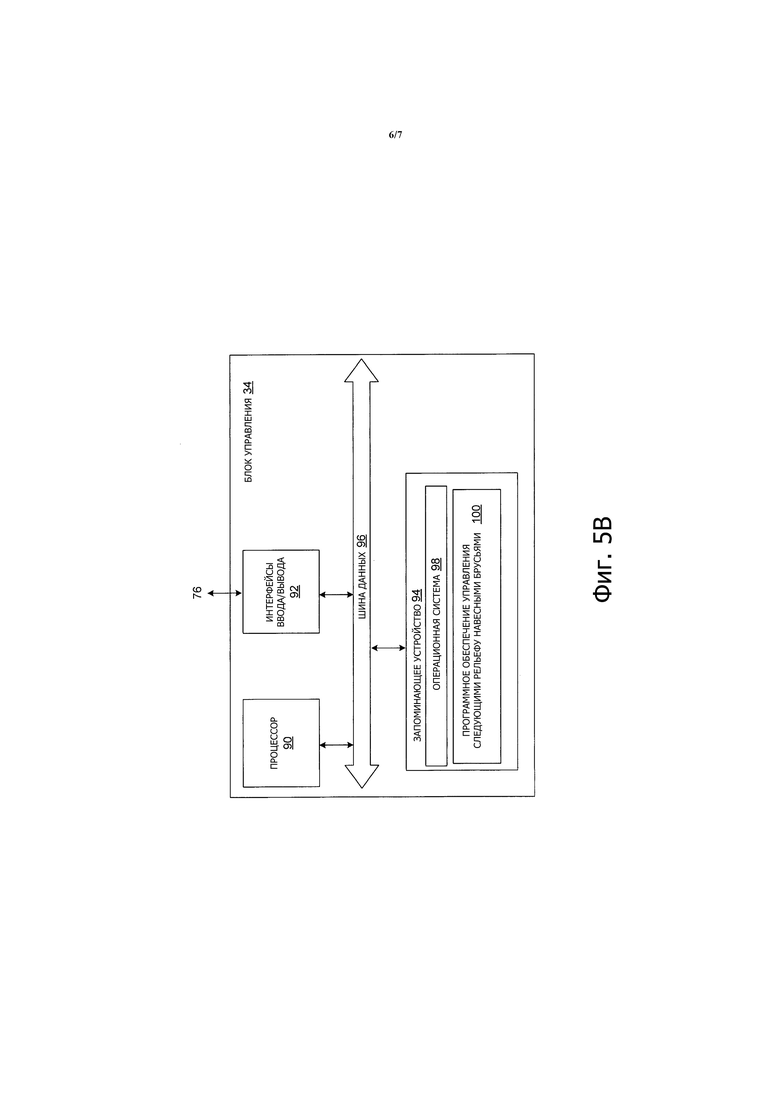
на фиг. 5В – блок-схема, поясняющая пример блока управления для системы управления на фиг. 5А;
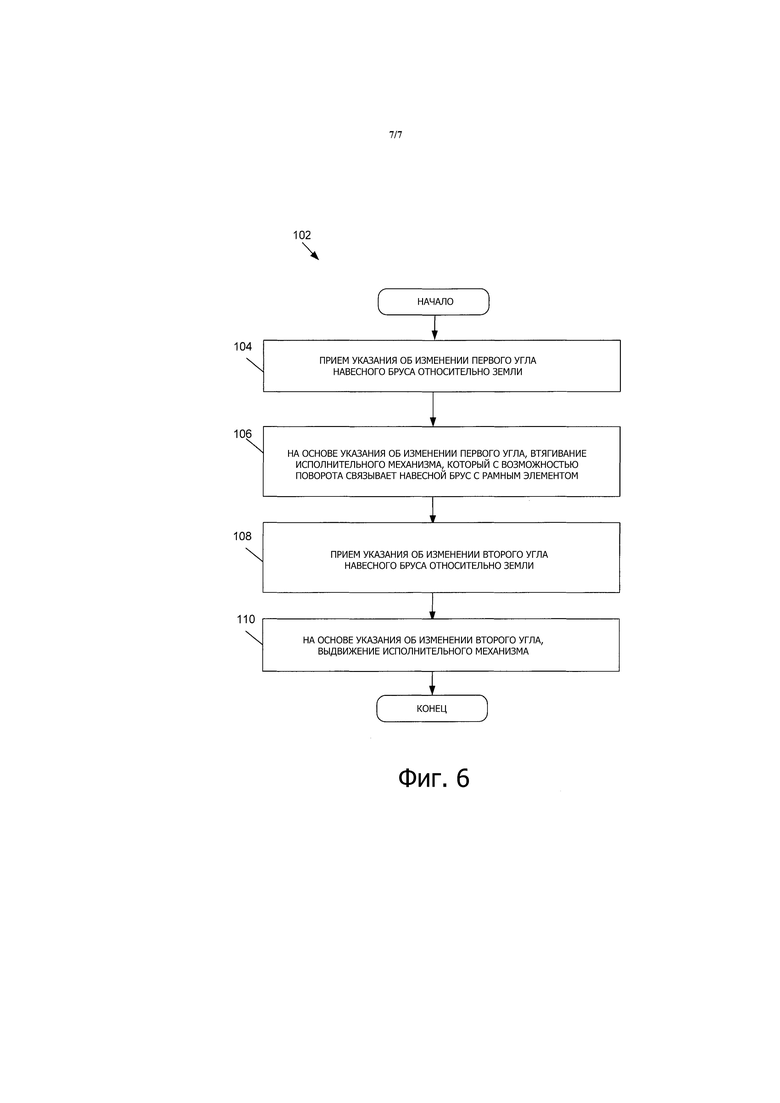
на фиг. 6 – блок-схема способа обеспечения следования рельефу навесного бруса согласно примеру варианта осуществления.
Варианты осуществления изобретения
После краткого описания различных особенностей системы с следующим рельефу навесным брусом согласно вариантам осуществления изобретения, далее приведено подробное описание системы c следующим рельефу навесным брусом со ссылками на чертежи. Хотя изобретение описано со ссылками на эти чертежи, отсутствует намерение ограничить изобретение описанным вариантом осуществления изобретения или вариантами осуществления изобретения. Далее, хотя в описании рассматриваются или описываются конкретные особенности одного или нескольких вариантов осуществления изобретения, такие конкретные особенности не обязательно являются частью каждого возможного варианта осуществления, равно как и все указанные преимущества, обеспечиваемые каким-либо одним вариантом выполнения. Напротив, цель заключается в раскрытии всех возможных вариантов, модификаций и эквивалентных конструкторских решений, охватываемых сущностью и объемом изобретения, т.е. системы с следующим рельефу навесным брусом, определяемых пунктами формулы изобретения. Кроме того, в контексте изобретения следует отметить, что формула изобретения не обязательно ограничивается описанными конкретными вариантами осуществления.
Следует отметить, что используемые в описании понятия, указывающие направление, такие как «передний», «задний», «левый» и «правый», определяются при взгляде вперед от задней части инструмента.
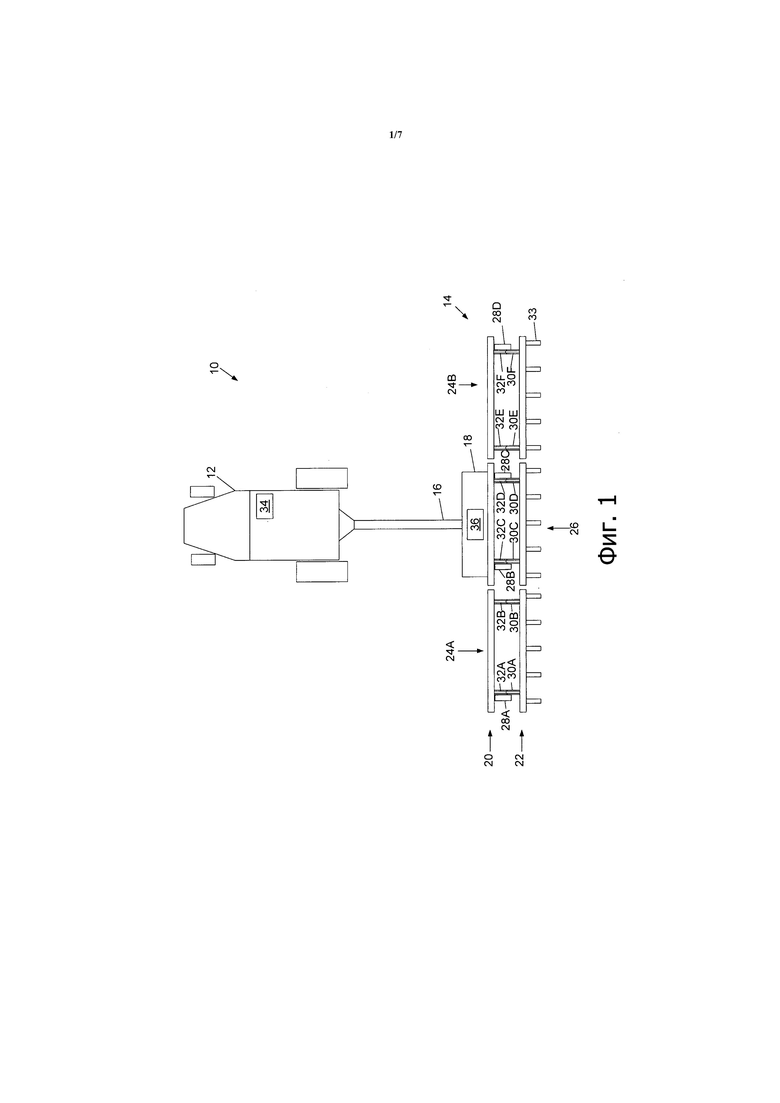
На фиг. 1 схематично показан пример оборудования 10, в котором может быть использована система с следующим рельефу навесным брусом согласно варианту осуществления изобретения. Специалисту в данной области будет ясно, что в контексте изобретения оборудование 10, показанное на фиг. 1, является исключительно поясняющим, и что в некоторых вариантах осуществления может быть использовано и другое оборудование. Показанное в качестве примера оборудование 10 включает в себя тягач 12 (в данном примере, трактор), который тянет за собой инструмент 14. Трактор 12 и инструмент 14 показаны частично. В некоторых вариантах осуществления могут быть использованы тягачи других типов, в том числе, самоходные машины с встроенным инструментом (взамен прицепного инструмента), или тягачи с осями или шасси других конструкций; эти варианты также охватываются объемом изобретения. Трактор 12 соединен с инструментом 14 посредством любого известного сцепного узла 16 и/или узла 16 дышла. Инструмент 14 может выполнять функцию опоры приспособления 18, которое может включать в себя один или несколько продуктовых контейнеров, компоненты управления, насосы, емкости и другие приспособления, используемые для распределения продукта и управления работой инструмента и/или его навесных приспособлений. Инструмент 14 содержит шасси, которое включает в себя параллельные рамные элементы 20, 22, расположенные один перед другим, соответственно, при развертывании (т.е. когда инструмент тянут в направлении вперед). В рассматриваемом примере инструмент 14 расположен в направлении, перпендикулярном направлению перемещения по полю. Инструмент 14 содержит боковые секции 24 (например, 24A, 24B) и центральную секцию 26, на которой установлено приспособление 18, и которая перемещается непосредственно за трактором 12. В некоторых вариантах осуществления, трактор 12 может тянуть инструмент 14 в положении, в котором центральная секция 26 физически смещена относительно центра трактора 12. Хотя это и не показано на фиг. 1, каждая из боковых секций 24 шарнирно соединена с центральной секцией 26, чем обеспечивается возможность их складывания в плоскость, занимаемую трактором 12 и инструментом 14, с целью уменьшения габаритов при операциях транспортировки. В некоторых вариантах осуществления складывание боковых секций 24 может осуществляться вне плоскости, занимаемой трактором 12 и инструментом 14, например, они могут складываться выше и сзади этой плоскости). К рамным элементам 20 боковых секций 24A, 24B и центральной секции 26 прикреплены соответствующие колеса 28 (например, колесо 28A – к рамному элементу 20 боковой секции 24A, колеса 28B-28C – к рамному элементу 20 центральной секции 26 и колесо – 28D к рамному элементу 20 боковой секции 24B). В некоторых вариантах осуществления системы с следующим рельефу навесным брусом можно использовать дополнительные колеса (например, в тандеме или парами или другим образом) в тех же или других положениях, или же колеса могут быть расположены в других местах, отличных от показанных. Например, в некоторых вариантах осуществления изобретения колеса 28 могут не располагаться между рамными элементами 20, 22. Тем не менее, в показанном примере колеса 28 расположены между рамными элементами 20, 22. Каждый рамный элемент 20, 22 содержит, соответственно, поперечные плечи 42 (не обозначенные на фиг. 1, но показанные на фиг. 2) и 30 (например, 30А – 30F), которые с возможностью поворота связывают (например, посредством шарнирного соединения с поперечными плечами рамного элемента 20) рамные элементы 22 с рамными элементами 20.
Исполнительные механизмы 32 (например, 32А, 32В, 32Е и 32F) прикреплены к поперечным плечам 30A, 30B, 30E, 30F боковых секций 24А, 24В, и исполнительные механизмы 32 (например, 32С, 32D) прикреплены к поперечным плечам 30C, 30D центральной секции 26. Заметим, что расположение и/или количество поперечных плеч 30 и/или исполнительных механизмов 32, показанное на фиг. 1, приведено для пояснения одного варианта осуществления изобретения и что в некоторых вариантах осуществления изобретения могут быть использованы другие и/или дополнительные количества и/или расположения. Исполнительные механизмы 32 могут быть выполнены в виде гидравлических исполнительных механизмов с одним штоком (например, действующий линейно узел с поршнем и штоком, хотя в некоторых вариантах осуществления изобретения может быть использовано приведение в действие с поворотом). В некоторых вариантах осуществления изобретения исполнительные механизмы 32 могут быть выполнены как пневматические, электрические, магнитные или электромагнитные исполнительные механизмы. Исполнительные механизмы 32 приспособлены для поворота рамных элементов 22 (например, навесного бруса) боковых и центральной секций 24, 26 в/ из любого положения вдоль диапазона положений, составляющего примерно 110°, хотя в некоторых вариантах осуществления изобретения диапазон может быть больше или меньше. Например, для работы в поле и операций транспортировки исполнительные механизмы 32 могут поворачивать рамные элементы 22 относительно рамных элементов 20 до угловых положений, образующих 0° (например, работа в поле с горизонтальной или ровной поверхностью), примерно 20 – 40° (например, поднимая рамный элемент 22, соответственно, для освобождения минимальной рекомендуемой высоты для концов поля или максимального рекомендуемого поворота для концов поля) или примерно 90° (например, для транспортировки в узкой конфигурации). Заметим, что угловое положение берется относительно горизонтальной плоскости рамных элементов 20. Исполнительные механизмы 32 также приспособлены для поворота рамных элементов 22 боковых и центральной секций 24, 26 до угловых положений ниже центра или положения в 0°. Например, в одном варианте осуществления изобретения исполнительные механизмы 32 могут быть выдвинуты (например, выдвинуты штоки) до углового положения, составляющего примерно 10° ниже опорного уровня, равного 0° (ниже уровня), чтобы приспособиться к перемещению по холмам, или даже до углового положения, образующего большие углы (как предложено на угол, равный 25° на фиг. 3), что описано далее. Другими словами, угловой размах положений, на которые может быть повернут рамный элемент 22 относительно рамного элемента 20, содержит тупой угол (например, более 90°).
Почвообрабатывающие приспособления 33, в том числе высевающие секции, с помощью которых осуществляют посев, удобрение и/или перемешивание почвы, съемно прикреплены к рамным элементам 22 и расположены сзади рамных элементов 22. Хотя показано, что высевающие секции 33 расположены полностью сзади рамных элементов 22, в некоторых вариантах осуществления изобретения высевающие секции 33 могут быть расположены поочередно в шахматном порядке, при этом положение высевающих секций 33 находится полностью сзади и немного впереди и сзади рамного элемента 22. Могут быть использованы другие конфигурации, что ясно специалистам в рассматриваемой области.
Трактор 12 также содержит блок 34 управления, который активирует приведение в действие исполнительных механизмов 32 на основе входных данных от оператора, программного обеспечения и/или входных данных устройства и/или сигналов датчиков, что дополнительно будет описано далее. Например, когда исполнительные механизмы 32 выполнены как гидравлические цилиндры, управление гидравлической жидкостью может быть достигнуто посредством управляющего компонента 36, который содержит одну или более клапанных коробок, каждая из которых содержит один или более управляющих клапанов, которые управляют состоянием гидравлических цилиндров 32 (например, управляют изменением давления и/или изменением объемного расхода гидравлической жидкости через цилиндры). Приведение в действие управляющего компонента 36 может осуществляться беспроводным образом или посредством проводного соединения (например, Isobus) в соответствии с командами от блока 34 управления.
Заметим, что система с следующим рельефу навесным брусом в некоторых вариантах осуществления изобретения может содержать компоненты, которые описаны для всего оборудования 10, или в некоторых вариантах осуществления изобретения может содержать подмножество описанных компонентов.
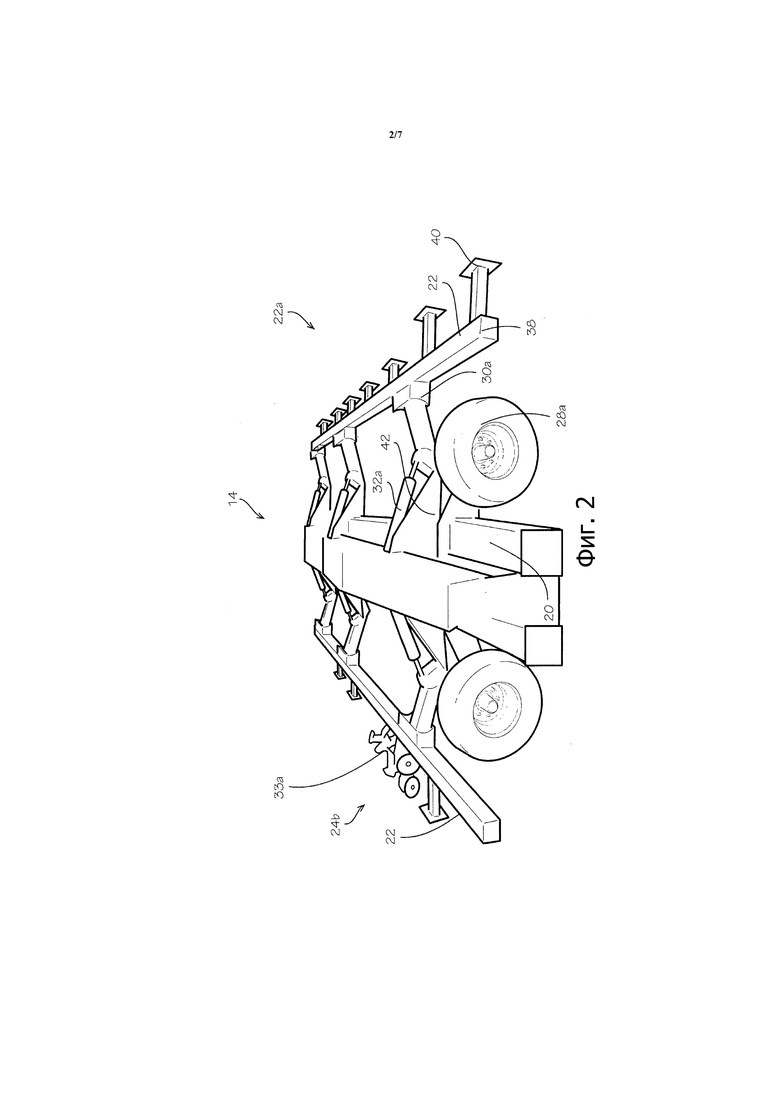
В общем описан пример оборудования 10, в котором может быть использован вариант системы с следующим рельефу навесным брусом со ссылками на фиг. 2, на которой показан пример инструмента 14 с положением с нулевым углом или уровнем рамного элемента 22 относительно рамного элемента 20. В показанном примере боковые секции 24 сложены вперед относительно центральной секции 26. Только одна высевающая секция 33А показана как прикрепленная к рамному элементу 22, при этом ясно, что обычно вдоль рамных элементов 22 прикреплены дополнительные высевающие секции. Обращая внимание на боковую секцию 24А, в частности обращая основное внимание на компоненты, связанные с исполнительным механизмом 32А, при этом ясно, что аналогичное описание применимо к поворотным компонентам оставшейся части боковой секции 24А, боковой секции 24В и центральной секции 26, которые здесь для ясности опущены, рамный элемент 22 содержит навесной брус 38. Навесной брус 38 может иметь прямоугольную форму и, в одном варианте осуществления изобретения, содержит на задней стороне скобы 40 для приспособлений, которые равномерно распределены вдоль навесного бруса 38. Скобы 40 для приспособлений прикреплены к навесному брусу 38 посредством любого известного механизма крепления, в том числе посредством сварки, болтов и так далее. Скобы 40 для приспособлений облегчают закрепление соответствующих почвообрабатывающих приспособлений 33, таких как высевающие секции 33А. На противоположной стороне навесного бруса 38 расположены поперечные плечи 30, которые отходят вперед от навесного бруса 38. Поперечные плечи 30 связаны через шарнирное соединение с продолжающимися назад поперечными плечами 42, которые отходят от рамного элемента 20.
Множество исполнительных механизмов 32 (например, 32А) предоставляют возможность поворота рамным элементам 20, 22. В одном варианте осуществления изобретения исполнительный механизм 32А (и другие исполнительные механизмы 32) прикреплен к верхней части рамного элемента 20 (например, к верхней части поперечного плеча 42 или рядом с верхней частью поперечного плеча 42) и поперечному плечу 30 напротив навесного бруса 38. Могут быть использованы другие местоположения, если обеспечивается поворот навесного бруса 38 относительно рамного элемента 20. На фиг. 2 исполнительные механизмы 32 повернули навесной брус 38 к углу, равному 0°, относительно горизонтальной плоскости поперечного компонента рамного элемента 20. В этой ориентации высевающие секции 33А могут работать и контактировать с почвой.
На фиг. 3 показан пример системы с следующим рельефу навесным брусом согласно варианту осуществления, при этом инструмент 14А содержит навесной брус 38А, показанный в разных угловых положениях. Инструмент 14А, показанный на фиг. 3, может иметь аналогичную конструкцию и может быть выполнен также, как и инструмент 14, показанный на фиг. 1 – 2. Инструмент 14А показан схематично, при этом рамный элемент 20А содержит поперечное плечо 42А, причем поперечное плечо 42А с возможностью поворота связано с навесным брусом 38А (например, посредством шарнирного соединения на поперечном плече 30 (фиг. 2) и поперечном плече 42). Исполнительный механизм 32А-1 обеспечивает втягивание и выдвижение, в результате которых навесной брус 38А поворачивается относительно рамного элемента 20А. Навесной брус 38А связан с высевающей секцией 33В посредством рычажного механизма 44. Рычажный механизм 44 состоит из известной структуры в форме параллелограмма и позволяет ограниченное параллелограммом движение между навесным брусом 38А и высевающей секцией 33В. Колесо 28А-1 известным образом связано с рамным элементом 20, аналогично показанному на фиг. 2, хотя, как описано выше, в некоторых вариантах осуществления изобретения могут использовать другие конфигурации шасси и, следовательно, упомянутые варианты считаются находящимися в пределах объема изобретения. Инструмент 14А показан опирающимся на поле 46, при этом поле 46 показано как горизонтальная поверхность и также наклоненная для представления того, когда исполнительному механизму 32А-1 нужно (выдвинуть) опустить навесной брус 38А для следования изменяющемуся рельефу поверхности поля. Один из моментов, которые показаны на фиг. 3, заключается в том, что в системе с следующим рельефу навесным брусом постоянно пытаются управлять размером «Х», чтобы высевающая секция 33В контактировала с землей (например, для осуществления надлежащего посева, перемешивания и так далее). Размер «Х» определяют относительно местоположения рядом с соединением высевающей секции с навесным брусом 38А (например, посредством соединения с рычажным механизмом в форме параллелограмма) относительно земли и, следовательно, он соответствует положению навесного бруса относительно земли.
Навесной брус 38А (38А в положении с нулевым углом) показан в нескольких угловых положениях, в том числе навесной брус 38А-1, навесной брус 38А-2 и навесной брус 38А-3. У навесного бруса 38А-1 исполнительный механизм 32А-1 поднял (например, посредством полного выдвижения соответствующего штока) навесной брус 38А-1 до примерно 90° (например, относительно горизонтального уровня или продольной оси рамного элемента 20А) для транспортировки в узкой конфигурации.
У навесного бруса 38А-2 исполнительный механизм 32А-1 поднял навесной брус 38А-2 до примерно 10° относительно горизонтального уровня или продольной оси рамного элемента 20А. Такое приведение в действие может быть осуществлено, например, если высевающая секция 33В пересекает заднюю сторону вала, чтобы попытаться управлять размером Х относительно поверхности земли, чтобы высевающая секция 33В контактировала (что также может предотвратить чрезмерные нагрузки на высевающую секцию 33В). Также для операций в поле, для предоставления возможности поворота в конце поля могут определять промежуточное положение навесного бруса 38А, близкое к положению, показанному на фиг. 3 для навесного бруса 38А-2. Например, навесной брус 38А может быть поднят примерно до 20 - 30°, при этом поворот определяют для того, чтобы предоставить блоку 34 управления возможность остановить в этом рабочем положении.
У навесного бруса 38А-3 исполнительный механизм 32А-1 опустил навесной брус 38А-3 ниже 0° (например, примерно на 10° ниже нулевого углового положения). Такое приведение в действие может быть осуществлено тогда, когда высевающая секция 33В перемещается на верхней стороне холма, как в показанном примере (для простоты пояснения высевающая секция 33В фактически не показана пересекающей наклон в 25°). Другими словами, приведение в действие служит для того, чтобы попытаться поддержать размер Х для навесного бруса 38А (например, аналогичное относится к высевающей секции 33В), что, в свою очередь, также исключает подъем высевающей секции 33В от поверхности поля 46. Как изложено выше, для даже больших изменений в рельефе пересекаемого поля (например, 25°) может быть осуществлено дополнительное приведение в действие, чтобы управлять размером «Х». Как показано на фиг. 3, положение навесного бруса регулируют для того, чтобы попытаться поддержать рабочее положение на уровне относительно рельефа поверхности, и чтобы предоставить возможность надлежащего контакта высевающей секции 33В с полем 46.
В одном варианте осуществления изобретения управление приведением в действие основано на одном или более датчиках, которые определяют положение навесного бруса 38А. Датчики могут быть выполнены для каждой высевающей секции 33В сеялки, или один или более датчиков могут быть использованы для всех высевающих секций 33В. В общем, чтобы предоставить навесному брусу 38А (и, следовательно, навесному брусу 38А) возможность следовать рельефу поля, принимают информацию от датчиков, касающуюся (относительного) положения навесного бруса 38А (и, расширяя, относительного положения высевающей секции 33В) относительно земли. Датчик высевающей секции, такой как датчик 50, используют для операции следования рельефу. В одном варианте осуществления изобретения используют по меньшей мере один датчик 50 высевающей секции, хотя в некоторых вариантах осуществления изобретения датчик 50 высевающей секции может быть выполнен для каждой высевающей секции 33В. Кроме того, поворот навесного бруса для осуществления операции в поле также может опираться на информацию от датчиков. Например, в конце «прохода» высевающие секции 33В поднимают в положение для конца поля, тягач разворачивается и высевающие секции 33В снова опускают для контакта с полем при следующем проходе. Эту операцию называют поворотом в конце поля, что включает в себя переход от положения следования рельефу или положения работы в поле для навесного бруса 38А (и, следовательно, высевающих секций 33В) до заранее заданного (или, в некоторых вариантах осуществления изобретения, задаваемого оператором) промежуточного угла навесного бруса 38А. Повороту в конце поля помогает использование информации от датчиков, касающейся положения навесного бруса относительно рамы 20А. В одном варианте осуществления изобретения для предоставления этой информации может быть использован один или более датчиков, в том числе датчик 48. Может присутствовать один датчик 48, который соответствует нескольким высевающим секциям, или может присутствовать несколько датчиков 48 (например, по одному на каждую высевающую секцию 33В). Датчик 48 также может быть использован для способствования в перемещении, например, для активирования электронной остановки (по сигналу от блока 34 управления), когда навесной брус 38А достиг положения для транспортировки (например, примерно 90°).
Датчик 48 может быть расположен рядом шарниром поперечного плеча 42 рамного элемента 20 и там, где навесной брус 38А соединен с поперечным плечом 42. В этом положении датчик 48 определяет угловое положение и/или изменение углового положения между навесным брусом 38А и рамным элементом 20. Датчик 50 может быть расположен у шарнира между рычажным механизмом 44 и навесным брусом 38А и может быть использован для определения положения навесного бруса 38А (и, следовательно, положения высевающей секции 33В) относительно земли. То есть, система с следующим рельефу навесным брусом пытается следовать рельефу поля 46 (управляя размером «Х»), когда области поворота начинают перемещаться в ответ на изменения поверхностей поля. Короче говоря, система с следующим рельефу навесным брусом пытается сохранить сравнительно постоянный размер «Х» или расстояние навесного бруса 38А относительно земли и также управляет перемещением навесного бруса 38А таким образом, чтобы высевающая секция 33В контактировала с землей.
В одном варианте осуществления изобретения каждый из датчиков 48 и 50 может быть выполнен как кодовый датчик угла поворота, который предоставляет значение угла для каждой запрограммированной величины определенного поворота. Например, кодовый датчик угла поворота может быть оптическим и для каждого определенного поворота или щелчка (например, единичный поворот или «щелчок» соответствует одному градусу, хотя могут быть использованы другие разрешения) блок 34 управления (фиг. 1) может отслеживать, на основе сигнала от датчиков 48, 50, на какой угол навесной брус 38А повернулся относительно рамы 20А (по датчику 48) и земли (по датчику 50).
Для управления следованием рельефу блок 34 управления может быть запрограммирован для активирования приведения в действие исполнительного механизма 32А-1 на основе определенного (например, посредством датчика 50) порогового значения в градусах от опорного уровня, равного 0°, что обеспечивает буфер для чрезмерных приведений в действие. В некоторых вариантах осуществления изобретения скорость поворота также может активировать блок 34 управления, чтобы он передавал скорость приведения в действие. Например, при одном щелчке датчика 50, блок 34 управления может передать скорость приведения в действие в определенных процентах (например, 1%) или значение, и поворот в 5° может активировать передачу большей скорости (например, 50%) для того, чтобы служить опережающим образом, чтобы исключить широкий или быстрый ход исполнительного механизма 32А-1.
В некоторых вариантах осуществления изобретения датчики 48 и/или 50 могут быть выполнены в виде электромагнитных датчиков неконтактного типа, в том числе ультразвуковых, радиолокационных или оптических радиолокационных датчиков, или в виде комбинации датчиков углового положения и неконтактных датчиков. Например, электромагнитные датчики могут определять положение земли (например, с помощью передачи в сторону земли и отражения от земли) относительно навесного бруса 38А и передавать сигнал на блок 34 управления, чтобы запустить регулирование навесного бруса 38А, чтобы управлять (например, поддерживать) размером Х между навесным брусом и землей, чтобы он был, по существу, постоянным. Заметим, что в некоторых вариантах осуществления изобретения электромагнитные датчики могут быть расположены в других местах, в том числе на высевающей секции 33В, электромагнитные датчики могут быть выполнены с возможностью определения абсолютной высоты навесного бруса 38А относительно земли или изменения высоты относительно земли.
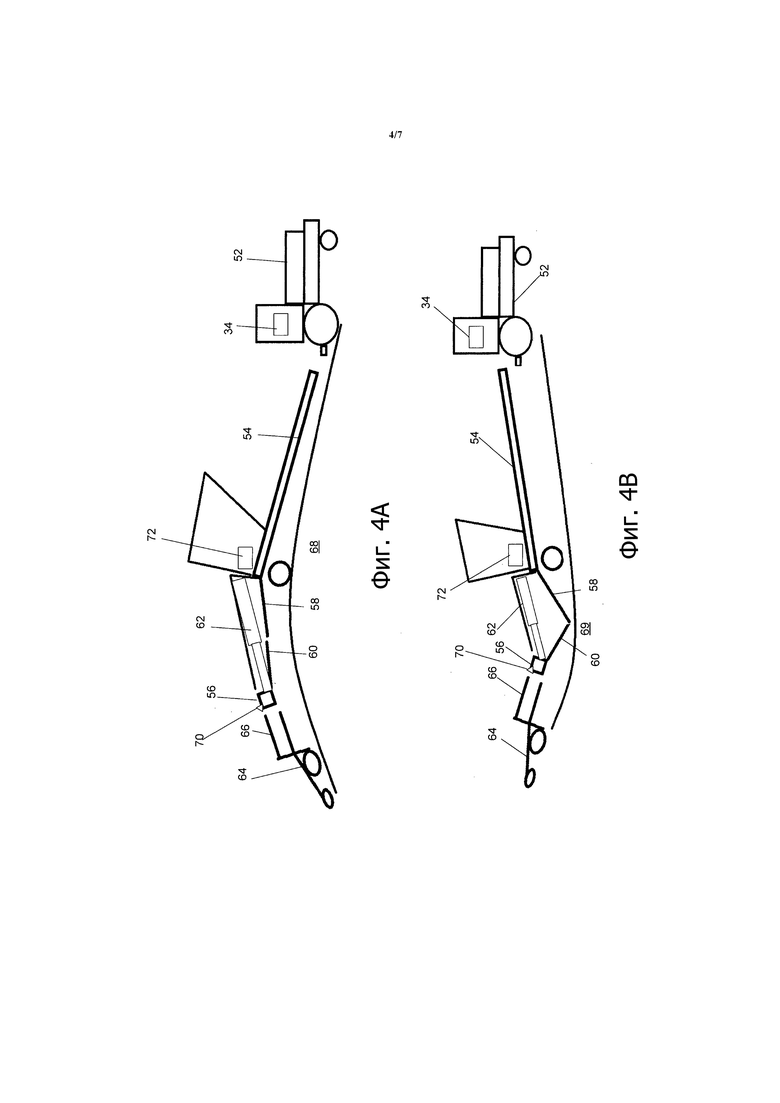
Далее обратим внимание на фиг. 4А - 4В, на которых схематично показан пример операций для системы с следующим рельефу навесным брусом согласно варианту осуществления. На фиг. показан трактор 52, соединенный с рамой 54 сеялки. Рама 54 сеялки с возможностью поворота соединена с навесным брусом 56 через поперечные плечи 58, 60. Исполнительный механизм 62 расположен между поперечными плечами 58, 60. Навесной брус 56 дополнительно связан с высевающей секцией 64 через рычажный механизм 66. Заметим, что рама 54 сеялки может быть аналогична рамному элементу 20 (фиг. 1), и поперечные плечи 58, 60 могут быть аналогичны поперечным плечам 42 и 30 (фиг. 1 - 2). Также навесной брус 56 может быть аналогичен навесному брусу 38 (фиг. 3), а высевающая секция 64 и рычажный механизм 66 могут быть аналогичны, соответственно, высевающей секции 33 (фиг. 1 - 2) и рычажному механизму 44 (фиг. 3). На фиг. 4А рама 54 сеялки показана перемещающейся вниз по склону холма 68. Датчик 70 угла расположен рядом с навесным брусом 56 и высевающей секцией 64, и он определяет изменение положения навесного бруса 56 (и, следовательно, высевающей секции 64) относительно земли и направляет сигналы на блок 34 управления. Блок 34 управления, в свою очередь, обрабатывает принятый сигнал и направляет результат на управляющий компонент 72 для изменения состояния исполнительного механизма 62 (например, изменения давления и/или потока жидкости в случае гидравлического исполнительного механизма) в соответствии с определенным изменением угла, в результате чего шток исполнительного механизма 62 выдвигается с целью поворота навесного бруса 56 вниз для приспособления к изменению рельефа. Заметим, что в обычных системах высевающая секция может быть поднята от земли из-за используемых жестких структур, что приводит к недостаточной глубине посева.
Как показано на фиг. 4В, рама 54 сеялки перемещается вверх по склону, а высевающая секция 64 перемещается вниз к долине 69 или оврагу. Датчик 70 определяет изменение углового положения навесного бруса 56 (и высевающей секции 64) относительно земли и направляет сигнал на блок 34 управления. В свою очередь блок 34 управления направляет сигнал на управляющий компонент 72, в соответствии с определенным изменением угла, в результате чего шток исполнительного механизма 62 втягивается, чтобы навесной брус 56 повернулся вверх для приспособления к изменению рельефа. В обычной системе высевающая секция может потерять контакт с полем, в результате чего семена будут расположены слишком глубоко, что отрицательно скажется на урожайности. Также высевающая секция в обычной системе может подвергаться воздействию чрезмерных сил (например, возможно вызывающих повреждение или поломку высевающей секции).
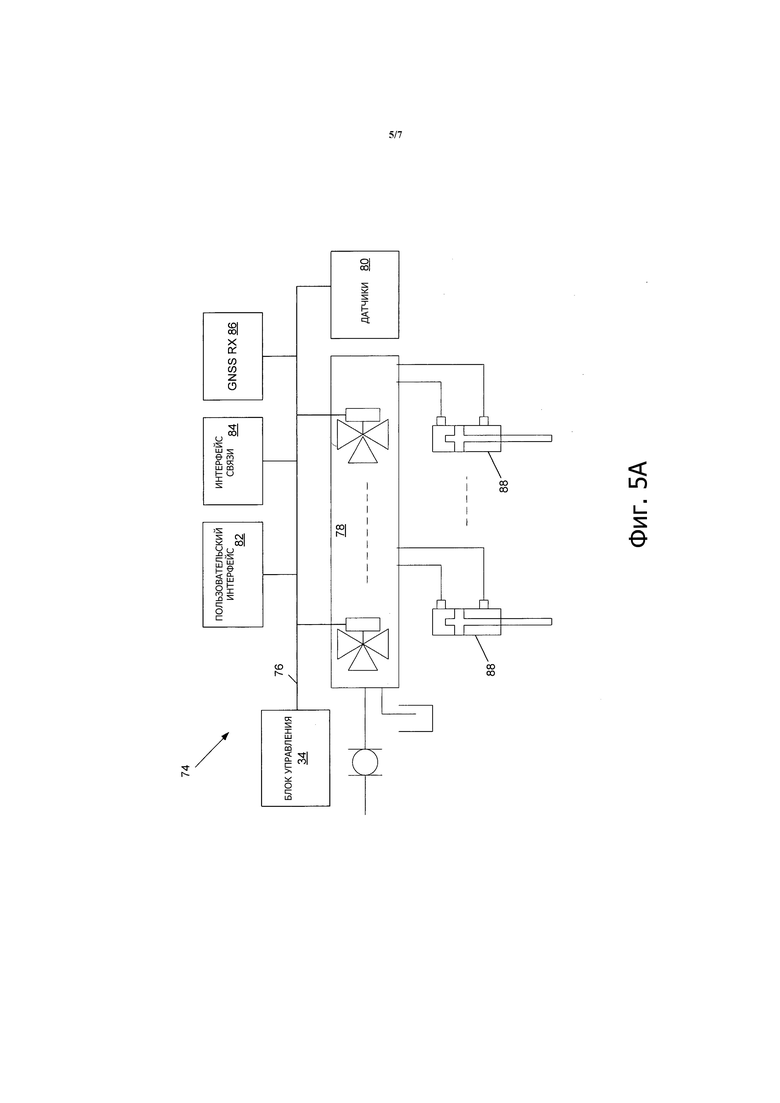
Далее рассмотрим фиг. 5А, на которой показан пример системы 74 управления согласно варианту осуществления, используемой для управления операциями поворотов навесного бруса системы с следующим рельефу навесным брусом согласно варианту осуществления. Ясно, что в контексте изобретения некоторые варианты осуществления изобретения могут содержать дополнительные компоненты или меньшее количество или другие компоненты и что пример, показанный на фиг. 5А, является пояснением одного варианта осуществления изобретения из нескольких. Система 74 управления может быть расположена полностью на инструменте (например, инструменте 14, фиг. 1), может быть распределена по тягачу (например, трактору 12, фиг. 1) и инструменту, или по дополнительным устройствам (например, устройствам дистанционного управления). Кроме того, хотя на фиг. показан один блок 34 управления, в некоторых вариантах осуществления изобретения система 74 управления может состоять из множества блоков управления, которые выполнены аналогично блоку 34 управления. В показанном варианте выполнения блок 34 управления связан через одну или более сетей, таких как сеть 76 (например, локальную сеть интеллектных контроллеров (сеть CAN) или другую сеть, такую как сеть, соответствующая стандарту ISO 11783, также называемую «Isobus»), с управляющими компонентами 78, одним или более датчиками 80, пользовательским интерфейсом 82, интерфейсом 84 связи и устройством 86 приема систем глобальной спутниковой навигации (GNSS). Управляющие компоненты 78 могут быть выполнены аналогично управляющим компонентам 36 (фиг. 1) и 72 (фиг. 4А). Датчики 80 могут быть выполнены аналогично датчикам 48, 50 (фиг. 3) и/или 70 (фиг. 4А). Заметим, что работа системы управления описана, в основном, в контексте управления через один блок 34 управления, при этом ясно, что в описанные функциональные возможности в некоторых вариантах осуществления изобретения могут быть включены дополнительные блоки управления.
Управляющие компоненты 78 могут содержать клапанную коробку, которая содержит один или более или комбинацию управляющих клапанов, воздушных клапанов, переключателей, реле, соленоидов, двигателей и так далее для активации приведения в действие исполнительных механизмов (например, исполнительного механизма 32, фиг. 2), которые управляют поворотом навесных брусьев (например, навесного бруса 38, фиг. 2). В показанном примере управляющие компоненты 78 содержат один или более многопозиционных (например, трехпозиционных) гидравлических управляющих клапанов, которые связаны с соленоидами, при этом соленоиды принимают сигналы от блока 34 управления и активируют перемещение золотника или тарелки (тарелок) управляющих клапанов. В свою очередь управляющие клапаны регулируют поток в исполнительные механизмы и из исполнительных механизмов, которые, в одном варианте осуществления изобретения, содержат действующие линейно гидравлические цилиндры 88 с штоком и одним поршнем. Регулировка потока и/или давления для поршня позволяет при необходимости втягивать или выдвигать шток. Как предложено выше, технология управления может быть пневматической, электрической, магнитной или электромагнитной.
Датчики 80 могут содержать датчики углового положения (например, кодовые датчики угла поворота, в том числе основанные на оптических или других электромагнитных частотах) или датчики неконтактного типа, в том числе радиолокационные, акустические, оптические радиолокационные и другие. В некоторых вариантах осуществления изобретения может быть использована комбинация датчиков этих типов. Датчики 80 используют для определения положения навесного бруса высевающей секции, в том числе определения расстояния между навесным брусом и поверхностью земли и/или углового положения навесного бруса относительно рамного элемента (например, рамного элемента 20, фиг. 1).
Пользовательский интерфейс 82 может содержать один или более компонентов, в том числе любое устройство или комбинацию устройств из следующих: клавиатура, мышь, микрофон, устройство отображения сенсорного или не сенсорного типа (например, монитор или экран), джойстик, рулевое колесо, FNR рычаг и/или другие устройства (например, переключатели, гарнитура с эффектом присутствия), которые позволяют оператору осуществлять ввод и/или вывод. Например, в некоторых вариантах осуществления изобретения пользовательский интерфейс 82 может быть использован для представления на экране дисплея вариантов управления инструментом (например, опустить навесной брус для контакта высевающих секций с почвой, поднять навесной брус для концов поля, поднять навесной брус для транспортировки и так далее), чтобы оператор имел возможность выбора, и/или пользовательский интерфейс 82 может обеспечить обратную связь, когда эти действия были предприняты или подлежат выполнению, когда их осуществляют автоматически (например, оператору предоставляют возможность отклонить или подтвердить или просто наблюдать). В некоторых вариантах осуществления изобретения обратная связь может принимать форму рекомендаций оператору для выполнения определенных действий. В одном варианте осуществления изобретения на экране может быть представлено визуальное изображение инструмента, при этом данные датчиков передают в форме данных и/или визуальной информации о перемещении навесного бруса относительно рельефа поля. В некоторых вариантах осуществления изобретения функции поворота вручную навесного бруса в разные рабочие положения могут быть выполнены с помощью активирования переключателя, рычага, рукоятки и так далее или с помощью вербальной команды.
Интерфейс 84 связи может содержать модуль беспроводного сетевого интерфейса (например, содержащий модем радиочастотной связи и/или модем сотовой связи) для беспроводной связи с другими устройствами комбинации тягач/инструмент или с удаленными устройствами (например, внешними устройствами по отношению к машине или буксирующему транспортному средству). Интерфейс 84 связи может работать вместе с программным обеспечением связи (например, содержащим программное обеспечение браузера) в блоке 34 управления или в качестве части другого блока управления, связанного с сетью 76 и выделенного в качестве шлюза для беспроводной связи с другими устройствами или сетями. Интерфейс 84 связи может содержать MAC и PHY компоненты (например, схему радио, содержащую устройства приемо-передачи, антенны и так далее), что должно быть ясно специалисту в рассматриваемой области.
Устройство 86 приема GNSS (GNSS RX) может содержать GPS устройство приема, например, для приема координат местоположения тягача и/или инструмента. Устройство 86 приема GNSS может работать совместно с картами поля, которые хранятся локально в блоке 34 управления (или с доступом из удаленного сервера) для того, чтобы определить концы поля, дороги, входы на поле и/или места расположения элементов поверхности (например, холмов, оврагов) и так далее. Например, использование мест расположения элементов поверхности может быть частично использовано для того, чтобы предоставить блоку 34 управления возможность улучшения предвидения величины (например, скорости), характеризующей приведение в действие для поворота навесного бруса.
На фиг. 5В дополнительно показан пример варианта выполнения блока 34 управления. Специалисту в рассматриваемой области должно быть ясно в контексте изобретения, что пример блока 34 управления является просто пояснением и что некоторые варианты выполнения блоков управления могут содержать меньшее количество компонентов или дополнительные компоненты и/или некоторые функциональные возможности, связанные с разными компонентами, которые показаны на фиг. 5В, могут быть объединены или дополнительно распределены по дополнительным модулям, в некоторых вариантах осуществления изобретения. Необходимо учитывать, что, хотя описание приведено в контексте расположения в тягаче (например, тракторе 52, фиг. 4А), в некоторых вариантах осуществления изобретения блок 34 управления или все его функциональные возможности или часть его соответствующих функциональных возможностей может быть реализована в инструменте (например, инструменте 14, фиг. 1) или в вычислительном устройстве или системе, которые расположены вне трактора и/или инструмента. Как показано на фиг. 5А и 5В, блок 34 управления или электронный блок (ECU) управления в этом примере является компьютером, но он может быть реализован как программируемый логический контроллер (PLC), вентильная матрица (FPGA), программируемая пользователем, специализированная интегральная схема (ASIC) и как другие устройства. Необходимо учитывать, что определенные хорошо известные компоненты компьютеров опущены для исключения затруднения понимания значимых особенностей блока 34 управления. В одном варианте осуществления изобретения блок 34 управления содержит один или более процессоров (также называемых блоками обработки или обрабатывающими элементами), таких как процессор 90, интерфейс (интерфейсы) 92 ввода/вывода и запоминающее устройство 94, которые связаны с одной или более шинами данных, такими как шина 96 данных. Запоминающее устройство 94 может содержать любой один или комбинацию из элементов энергозависимой памяти (оперативное запоминающее устройство RAM, такое как DRAM и SRAM и так далее) и элементов энергонезависимой памяти (например, ROM, флеш-память, накопитель на жестких дисках, EPROM, EEPROM, CDROM и так далее). Запоминающее устройство 94 может хранить собственную операционную систему, одно или более собственных приложений, системы эмуляции или эмулированные приложения для любой из множества операционных систем и/или эмулированные аппаратные платформы, эмулированные операционные системы и так далее.
В варианте осуществления изобретения, показанном на фиг. 5В, запоминающее устройство 94 содержит операционную систему 98 и программное обеспечение (SW) 100 управления следующими рельефу навесными брусьями. Необходимо учитывать, что в некоторых вариантах осуществления изобретения в запоминающем устройстве 94 или дополнительном запоминающем устройстве могут быть размещены дополнительные или меньшее количество модулей программного обеспечения (например, объединенные функциональные возможности). Например, запоминающее устройство 94 также может содержать программное обеспечение браузера и/или программное обеспечение для связи. В некоторых вариантах осуществления изобретения отдельное устройство хранения может быть связано с шиной 96 данных, такое как постоянная память (например, оптическая, магнитная и/или полупроводниковая память и соответствующие приводы).
Программное обеспечение 100 (SW) управления следующими рельефу навесными брусьями принимает входные данные от пользовательского интерфейса 82 (через интерфейсы 92 ввода/вывода и сеть 76) и входные данные от датчиков 80 (через интерфейсы 92 ввода/вывода и сеть 76). В некоторых вариантах осуществления изобретения программное обеспечение 100 (SW) управления следующими рельефу навесными брусьями может принимать дополнительные входные данные, содержащие координаты местоположения, от устройства приема GNSS, чтобы идентифицировать определенные признаки поверхности, концы поля и/или дороги для активирования определенных поворотов навесного бруса. Как предложено выше, входные данные от датчиков преобразуют в сигнал приведения в действие (содержащий величину и, при желании, скорость), который используют для получения подходящего хода для требуемого компенсирующего перемещения, осуществляемого посредством исполнительного механизма (например, цилиндров 88) для регулировки поворота навесного бруса. В некоторых вариантах осуществления изобретения входные данные от оператора в пользовательском интерфейсе 82 также передают и преобразуют в сигнал приведения в действие для перемещения навесного бруса в надлежащее положение (например, для подъема навесного бруса на конце поля, для транспортировки в узкой конфигурации и так далее). Программное обеспечение 100 (SW) управления следующими рельефу навесными брусьями также обеспечивает функциональные возможности пользовательского интерфейса с целью предоставления обратной связи об определенных поворотах навесного бруса с или без возможности оператору вмешиваться, как объяснено ранее.
Исполнение программного обеспечения 100 (SW) управления следующими рельефу навесными брусьями может быть реализовано посредством процессора 90 под управлением и/или контролем операционной системы 98. Процессор 90 может быть реализован как выполненный на заказ или серийно выпускаемый процессор, центральный обрабатывающий блок (CPU) или вспомогательный процессор среди нескольких процессоров, основанный на полупроводниках микропроцессор (в форме интегральной микросхемы), микропроцессор, одна или несколько специализированных интегральных схем (ASIC), несколько подходящим образом сконфигурированных цифровых логических элементов и/или другие хорошо известные электрические конфигурации, содержащие дискретные элементы, как отдельные, так и в различных комбинациях для координирования всей работы блока 34 управления.
Интерфейсы 92 ввода/вывода обеспечивают один или несколько интерфейсов для сети 76 и других сетей. Другими словами, интерфейсы 92 ввода/вывода могут содержать любое количество интерфейсов для ввода и вывода сигналов (например, аналоговых или цифровых данных) для передачи информации (например, данных) по сети 76. Ввод может включать в себя ввод оператором (локальный или удаленный) посредством пользовательских интерфейсов 82 и ввод из сигналов, переносящих информацию от одного или нескольких компонентов системы 74 управления, как описано выше.
Когда определенные варианты осуществления блока 34 управления реализованы по меньшей мере частично посредством программного обеспечения (в том числе аппаратнореализованного программного обеспечения), как показано на фиг. 5В, следует отметить, что программное обеспечение может хранится на разных долговременных считываемых компьютером носителях информации для использования разнообразными связанными с компьютерами системами или способами или для использования применительно к упомянутым системам или способам. В контексте этого документа считываемый компьютером носитель может содержать электронное, магнитное, оптическое или другое физическое устройство или оборудование, которое может содержать или хранить компьютерную программу (например, исполнимый код или команды) для использования связанными с компьютерами системами или способами или для использования применительно к упомянутым системам или способам. Программное обеспечение может быть встроено в разнообразные считываемые компьютером носители для использования с или применительно к исполняющей команды системе, устройству или оборудованию, такому как система на основе компьютера, содержащая процессор система или другая система, которая может считывать команды из исполняющей команды системы, устройства или оборудования, и исполнять упомянутые команды.
Когда определенный вариант осуществления блока 34 управления реализован, по меньшей мере частично, посредством аппаратного обеспечения, такие функциональные возможности могут быть реализованы посредством любой из следующих технологий или посредством комбинации следующих технологий, которые хорошо известны в технике: дискретная логическая схема (схемы), содержащая логические элементы для реализации логических функций для сигналов данных, специализированная интегральная схема (ASIC) с надлежащими комбинаторными логическими элементами, программируемая матрица (матрицы) (PGA) логических элементов, вентильная матрица (FPGA), программируемая пользователем и так далее.
Когда описаны некоторые примеры вариантов выполнения системы с следующим рельефу навесным брусом, ясно, что с учетом изобретения один вариант осуществления реализуемого компьютером способа для инструмента, который содержит навесной брус, к которому прикреплены высевающие секции, этот способ выполнен для регулировки поворота навесного бруса на основе рельефа поля, по которому перемещается инструмент, указанный способ, обозначенный как способ 102 и показанный на фиг. 6, включает в себя следующее, в блоке управления (например, блоке 34 управления, фиг. 5B): принимают (104) указание об изменении первого угла навесного бруса относительно земли; на основе указания об изменении первого угла вызывают втягивание (106) исполнительного механизма, который с возможностью поворота связывает навесной брус с рамным элементом; принимают (108) указание об изменении второго угла навесного бруса относительно земли; и на основе указания об изменении второго угла вызывают выдвижение (110) исполнительного механизма.
Любые описания процессов или блоки в блок-схемах надо понимать как представляющие модули, сегменты или части кода, которые содержат одну или более исполнимых команд для реализации конкретных логических функций или этапов в процессе, и альтернативные реализации находятся в пределах объема вариантов осуществления изобретения, в которых функции могут быть исполнены в порядке, отличном от показанного или описанного, в том числе, по существу, одновременно или в обратном порядке, в зависимости от рассматриваемых функциональных возможностей, что ясно специалистам в рассматриваемой области.
Следует подчеркнуть, что описанные выше варианты выполнения системы с следующим рельефу навесным брусом являются просто возможными примерами реализаций, изложенными для ясного понимания принципов системы с следующим рельефу навесным брусом. Можно предложить большое количество изменений и модификаций, описанных выше вариантов выполнения системы с следующим рельефу навесным брусом, по существу, не выходящих за пределы идеи и принципов раскрытия. Все такие модификации и изменения считаются не выходящими за пределы объема изобретения и защищенными формулой изобретения.

Группа изобретений относится к сельскому хозяйству. Система для выравнивания по рельефам поля навесного бруса, несущего высевающие секции, содержит рамный элемент, навесной брус, связанный с рамным элементом через шарнир и ориентированный параллельно рамному элементу, первый датчик, выполненный с возможностью определения положения навесного бруса относительно земли. С навесным брусом связаны высевающие секции. Между рамным элементом и навесным брусом присоединен исполнительный механизм, приспособленный для поворота навесного бруса относительно рамного элемента на основе определенного положения навесного бруса. Система управления для выравнивания по рельефам поля инструмента, содержащего рамный элемент и навесной брус, через шарнир присоединенный к рамному элементу, параллельно рамному элементу, и к которому прикреплены высевающие секции. Указанная система содержит блок управления, по меньшей мере один датчик, выполненный с возможностью определения положения навесного бруса относительно земли, и исполнительный механизм, который присоединен между рамным элементом и навесным брусом. Блок управления выполнен с возможностью приема по меньшей мере одного сигнала от по меньшей мере одного датчика, указывающего положение навесного бруса относительно земли, и активации исполнительного механизма для поворота навесного бруса на основе определенного положения навесного бруса. Обеспечивается следование за рельефом поверхности поля. 2 н. и 17 з.п. ф-лы, 8 ил.
1. Система для выравнивания по рельефам поля навесного бруса, несущего высевающие секции, содержащая:
рамный элемент;
навесной брус, связанный с рамным элементом через шарнир и ориентированный параллельно рамному элементу;
высевающие секции, связанные с навесным брусом;
первый датчик, выполненный с возможностью определения положения навесного бруса относительно земли; и
исполнительный механизм, присоединенный между рамным элементом и навесным брусом и приспособленный для поворота навесного бруса относительно рамного элемента на основе определенного положения навесного бруса.
2. Система по п. 1, дополнительно содержащая второй датчик, выполненный с возможностью определения угла между навесным брусом и рамным элементом.
3. Система по п. 2, дополнительно содержащая блок управления, выполненный с возможностью приема первого и второго сигналов от первого и второго датчиков и активации приведения в действие исполнительного механизма на основе первого и второго сигналов.
4. Система по п. 3, дополнительно содержащая управляющий компонент, который приводит в действие исполнительный механизм, при этом блок управления выполнен с возможностью активации приведения в действие путем направления сигнала к управляющему компоненту.
5. Система по п. 4, в которой управляющий компонент содержит управляющий клапан, воздушный клапан, электронный управляющий компонент, магнитный управляющий компонент или электромагнитный управляющий компонент.
6. Система по п. 3, в которой блок управления дополнительно выполнен с возможностью активации регулировки скорости поворота на основе первых сигналов от первого датчика.
7. Система по п. 1, дополнительно содержащая блок управления, при этом блок управления выполнен с возможностью приема сигнала от первого датчика и активации приведения в действие исполнительного механизма на основе этого сигнала.
8. Система по п. 7, дополнительно содержащая управляющий компонент, который приводит в действие исполнительный механизм, при этом блок управления выполнен с возможностью активации приведения в действие путем направления сигнала к управляющему компоненту.
9. Система по п. 8, в которой управляющий компонент содержит управляющий клапан, воздушный клапан, электронный управляющий компонент, магнитный управляющий компонент или электромагнитный управляющий компонент.
10. Система по п. 7, в которой блок управления дополнительно выполнен с возможностью активации регулировки скорости поворота на основе сигналов от первого датчика.
11. Система по п. 1, в которой определенное положение является положением относительно поверхности поля, при этом система дополнительно содержит один или более электромагнитных датчиков, связанных с рамным элементом, навесным брусом или комбинацией из рамного элемента и навесного бруса, при этом один или более электромагнитных датчиков выполнены с возможностью определения абсолютной высоты или изменения высоты между поверхностью поля и навесным брусом или комбинацией рамного элемента и навесного бруса.
12. Система по п. 11, дополнительно содержащая блок управления, выполненный с возможностью приема одного или более сигналов от одного или более электромагнитных датчиков и активации приведения в действие исполнительного механизма на основе этого одного или более сигналов.
13. Система по п. 12, дополнительно содержащая управляющий компонент, который приводит в действие исполнительный механизм, при этом блок управления выполнен с возможностью активации приведения в действие путем направления сигнала к управляющему компоненту.
14. Система по п. 13, в которой управляющий компонент содержит управляющий клапан, воздушный клапан, электронный управляющий компонент, магнитный управляющий компонент или электромагнитный управляющий компонент.
15. Система по п. 12, в которой блок управления дополнительно выполнен с возможностью активации регулировки скорости поворота на основе одного или более сигналов от одного или более электромагнитных датчиков.
16. Система по п. 11, в которой один или более электромагнитных датчиков содержат ультразвуковой, оптический радиолокационный или радиолокационный датчики.
17. Система по п. 1, в которой исполнительный механизм выполнен с возможностью поворота навесного бруса в диапазоне тупых углов.
18. Система по п. 1, дополнительно содержащая по меньшей мере одно колесо, присоединенное к рамному элементу и по меньшей мере частично поддерживающее рамный элемент относительно земли.
19. Система управления для выравнивания по рельефам поля инструмента, содержащего рамный элемент и навесной брус, через шарнир присоединенный к рамному элементу, параллельно рамному элементу, и к которому прикреплены высевающие секции, включающая в себя:
блок управления;
по меньшей мере один датчик, выполненный с возможностью определения положения навесного бруса относительно земли; и
исполнительный механизм, который присоединен между рамным элементом и навесным брусом, при этом блок управления выполнен с возможностью приема по меньшей мере одного сигнала от по меньшей мере одного датчика, указывающего положение навесного бруса относительно земли, и активации исполнительного механизма для поворота навесного бруса на основе определенного положения навесного бруса.
| US 2016165789 A1, 16.06.2016 | |||
| DE 19722787 A1, 03.12.1998 | |||
| US 2015230391 A1, 20.08.2015 | |||
| US 6581695 B2, 24.06.2003 | |||
| US 2010096149 A1, 22.04.2010 | |||
| СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ИНСТРУМЕНТА ДЛЯ ВЗАИМОДЕЙСТВИЯ С ЗЕМЛЕЙ НА ОСНОВАНИИ ДАВЛЕНИЯ ТЕКУЧЕЙ СРЕДЫ | 2011 |
|
RU2586156C2 |

