Уровень техники
Изобретение в общем относится к наземному рабочему оборудованию, такому как сельскохозяйственное оборудование, а более конкретно к орудию, выполненному с возможностью определения положения инструментов для взаимодействия с землей путем измерения давления текучей среды в цилиндрах, которые управляют положением инструментов для взаимодействия с землей.
Обычно, сеялки буксируются позади трактора или другого рабочего транспортного средства посредством установочного кронштейна, закрепленного на жесткой раме посадочной машины или сеялки. Эти сеялки обычно включают в себя одно или более инструментов для взаимодействия с землей или сошников, которые образуют посевную борозду для закладки семян в почву. Сошники используются для вскрытия почвы, чтобы обеспечивать возможность закладки семян. После того, как семена заложены, за каждым сошником следует заделывающее колесо, которое заделывает почву поверх заложенных семян.
В некоторых конфигурациях сошники могут быть выполнены с возможностью перемещения между рабочим положением и нерабочим положением. Например, после завершения ряда семян сошники могут быть перемещены в нерабочее положение, в котором они не расцепляются с почвой. В результате семена не будут закладываться в почву, когда орудие разворачивают, например, на поворотной полосе поля. Как только орудие выровнено с краем ранее засаженной полосы почвы, сошники могут быть перемещены в рабочее положение, в котором они зацепляют почву.
Следует отметить, что может быть желательно прекращать поток продукта (например, семян, удобрения и т.д.) к сошникам, пока они находятся в нерабочем положении. В некоторых конфигурациях фермер может вручную включать и выключать поток продукта. В качестве альтернативы, для автоматического регулирования потока продукта на основании положения сошников, может применяться электронный рабочий переключатель. Например, в некоторых конфигурациях, сошники соединены с рамой орудия, которая поворачивается между рабочим и нерабочим положениями. Электронный рабочий переключатель может быть соединен с рамой и выполнен с возможностью отслеживания вращения для определения положения сошников. Например, электронный рабочий переключатель может отправлять сигнал, указывающий положение рамы, контроллеру, выполненному с возможностью регулирования потока продукта на основании сигнала. Тем не менее, некоторые сеялки включают в себя неподвижную раму и сошники, выполненные с возможностью перемещения по отдельности между рабочим и нерабочим положениями. В таких конфигурациях соединение электронного рабочего переключателя с каждым сошником для определения положения может быть чрезмерно сложным и дорогостоящим.
Краткое описание изобретения
Настоящее изобретение обеспечивает орудие, содержащее контроллер, выполненный с возможностью определения положения инструментов для взаимодействия с землей на основании давления текучей среды, подаваемой к приводным цилиндрам, выполненным с возможностью перемещения инструментов для взаимодействия с землей между рабочим положением и нерабочим положением. В приведенном в качестве примера варианте осуществления сельскохозяйственное орудие содержит инструмент для взаимодействия с землей, выполненный с возможностью зацепления почвы в рабочем положении и расцепления с почвой в нерабочем положении. Орудие также содержит приводной цилиндр, соединенный с инструментом для взаимодействия с землей и выполненный с возможностью перемещения инструмента для взаимодействия с землей между рабочим положением и нерабочим положением на основании потока текучей среды из системы подачи текучей среды. Кроме того, орудие содержит по меньшей мере один датчик, выполненный с возможностью выдачи сигнала, указывающего давление текучей среды в системе подачи текучей среды, и контроллер, выполненный с возможностью определения на основании сигнала находится ли инструмент для взаимодействия с землей в рабочем положении или в нерабочем положении. Некоторые конфигурации могут включать в себя множество инструментов для взаимодействия с землей и соответствующее количество приводных цилиндров. Измеряя давление текучей среды в системе подачи текучей среды, положение инструментов для взаимодействия с землей может быть определено без подсоединения к каждому инструменту отдельного переключателя, сокращая тем самым производственные затраты и сложность.
Краткое описание чертежей
Эти и другие признаки, аспекты и преимущества настоящего изобретения станут более понятными при прочтении нижеследующего подробного описания со ссылкой на прилагаемые чертежи, на которых аналогичными позициями обозначены аналогичные элементы на всех чертежах и на которых:
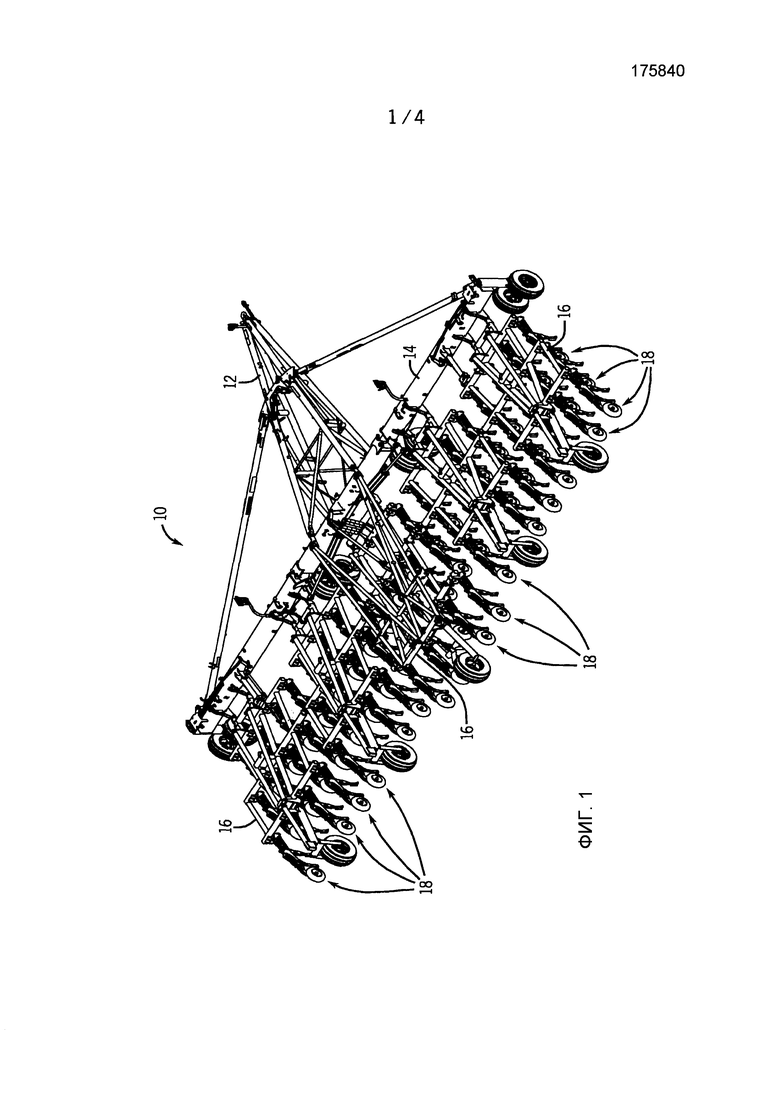
Фиг.1 представляет собой вид в перспективе орудия, содержащего контроллер, выполненный с возможностью определения положения инструментов для взаимодействия с землей на основании давления текучей среды, подаваемой к приводным цилиндрам, выполненным с возможностью перемещения инструментов для взаимодействия с землей между рабочим положением и нерабочим положением;
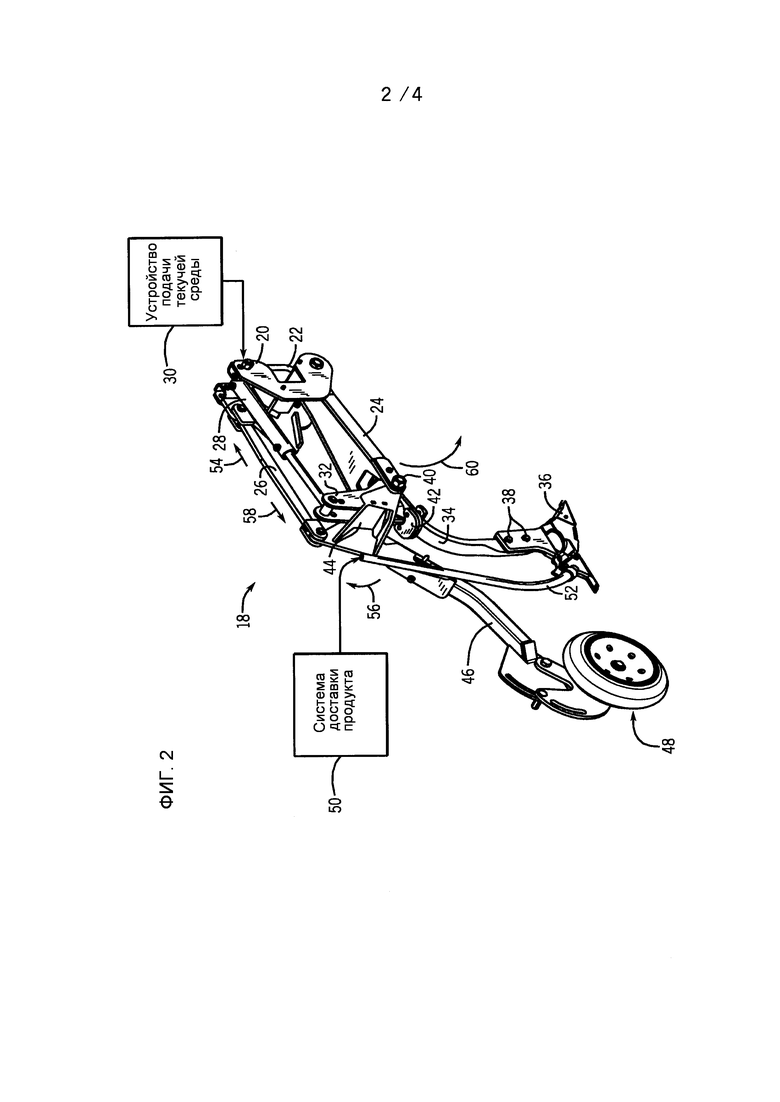
Фиг.2 представляет собой вид в перспективе приведенного в качестве примера сошника, имеющего приводной цилиндр, выполненный с возможностью перемещения инструмента для взаимодействия с землей между рабочим положением и нерабочим положением;
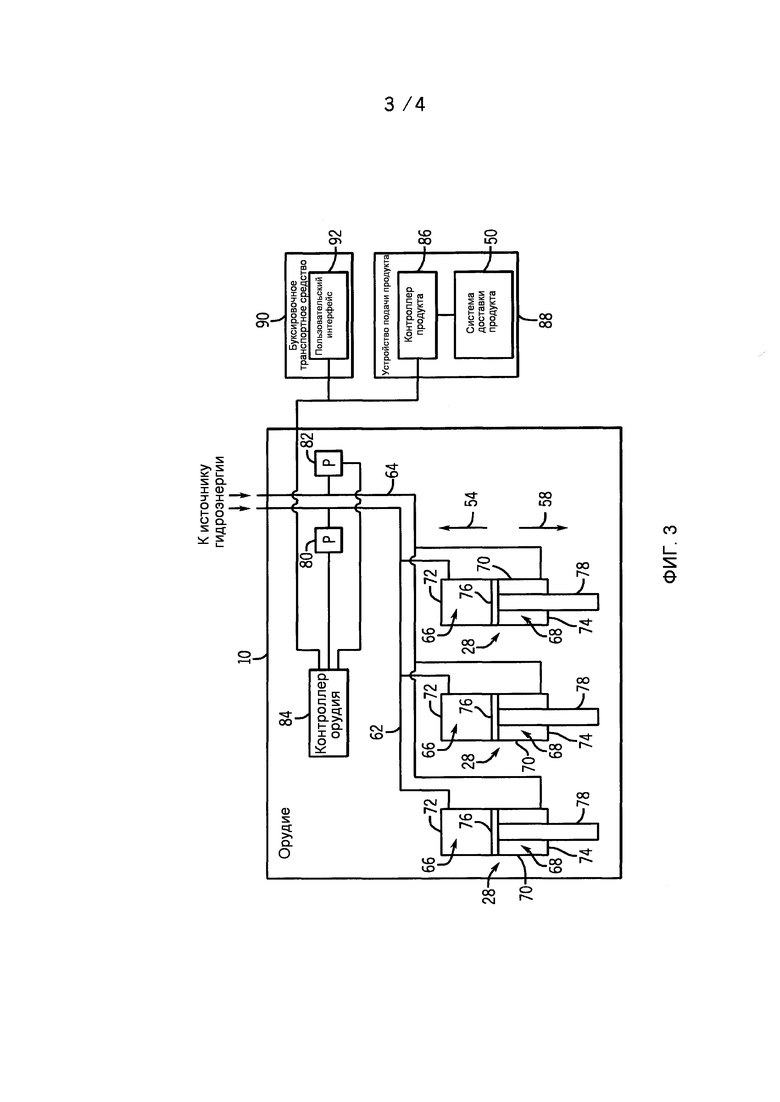
Фиг.3 представляет собой схематичный вид приведенного в качестве примера орудия, содержащего контроллер и датчики давления текучей среды, выполненные с возможностью определения положения инструментов для взаимодействия с землей; и
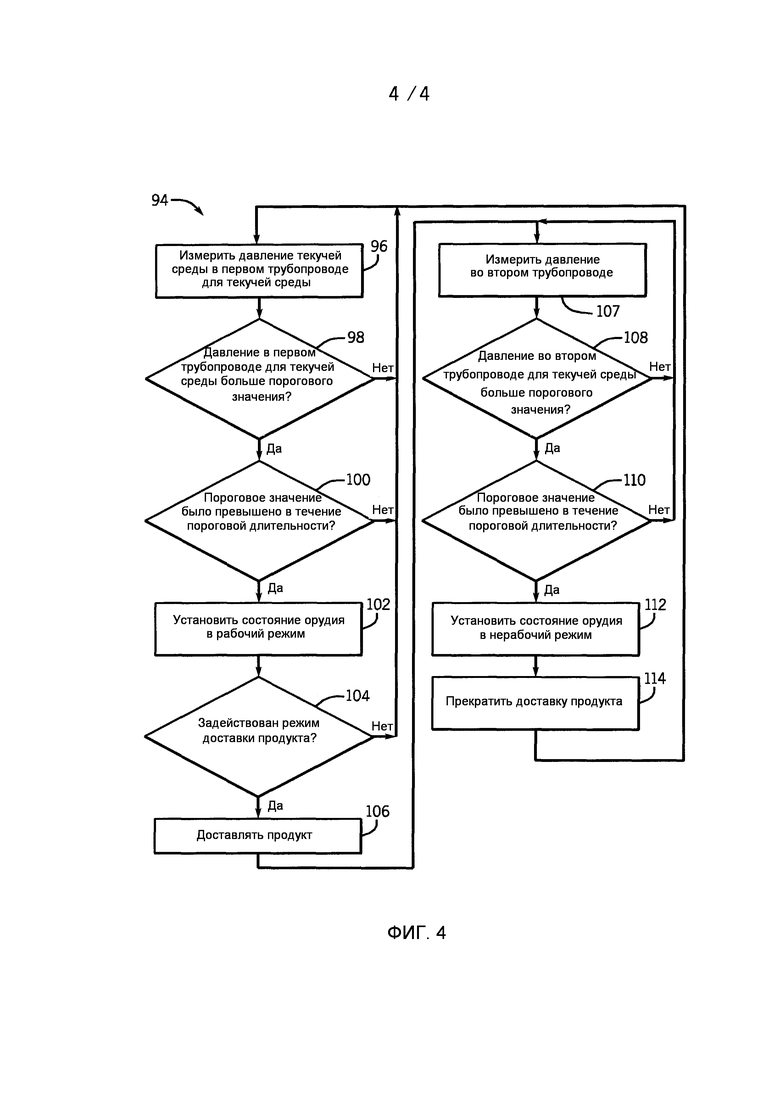
Фиг.4 представляет собой блок-схему последовательности операций приведенного в качестве примера способа эксплуатации орудия для автоматического регулирования потока продукта к инструментам для взаимодействия с землей на основании измерения давления текучей среды.
Подробное описание изобретения
Со ссылкой на чертежи, на фиг.1 показан вид в перспективе посевного орудия 10. Орудие 10 предназначено для буксировки позади рабочего транспортного средства, такого как трактор. Орудие 10 включает в себя буксирный тяговый узел 12, который показан в виде рамного прицепного узла в виде буквы А. Буксирный тяговый узел 12 может включать в себя сцепку, используемую для крепления к подходящей тракторной сцепке посредством шарового, вилочного или другого соединения. Буксирный тяговый узел 12 соединен с брусом 14 для навешивания рабочих органов, который служит опорой для множества инструментальных рам 16. Каждая инструментальная рама 16 включает в себя множество посевные орудий, такие как показанные сошники 18. Как подробно рассмотрено ниже, каждый сошник 18 включает в себя приводной цилиндр, выполненный с возможностью изменения рабочего положения инструмента для взаимодействия с землей, соединенного с сошником 18. В данном варианте осуществления приводные цилиндры питаются трубопроводами, продолжающимися от устройства подачи текучей среды. Датчики давления, соединенные с трубопроводами, выполнены с возможностью измерения давления текучей среды и отправки контроллеру сигнала, указывающего давление в каждом трубопроводе. Контроллер, в свою очередь, выполнен с возможностью определения на основании сигнала рабочего положения сошников. Таким образом, к каждому из сошников 18 может быть автоматически начат поток продукта (например, семян, удобрения и т.д.), когда сошники находятся в рабочем положении, и автоматически прекращен, когда сошники 18 находятся в нерабочем положении.
На фиг.2 показан вид в перспективе приведенного в качестве примера сошника 18, имеющего приводной цилиндр, выполненный с возможностью перемещения инструмента для взаимодействия с землей между рабочим положением и нерабочим положением. Следует понимать, что сошник 18 это разновидность высевающей секции, которая может быть размещена на сельскохозяйственном орудии, таком как посевное орудие 10, показанное на фиг.1. Как показано, сошник 18 включает в себя рамную опору 20, установочные кронштейны 22, первый элемент 24, второй элемент 26, и смещающий элемент, такой как приводной цилиндр 28 (например, гидравлический и/или пневматический цилиндропоршневой узел). Цилиндр 28 может быть соединен по текучей среде с устройством 30 подачи, которое обеспечивает поток текучей среды под давлением, который смещает шток поршня, продолжающийся из цилиндра. Следует понимать, что система подачи текучей среды может быть гидравлической или пневматической, питая таким образом гидравлический или пневматический цилиндр 28. Рамная опора 20 и рамный кронштейн 22 выполнены с возможностью сопряжения с инструментальной рамой 16, закрепляя тем самым сошник 18 на посевном орудии 10. Например, множество сошников 18 могут быть установлены параллельно вдоль инструментальной рамы 16. В данной конфигурации первый элемент 24, второй элемент 26 и рамная опора 20 образуют элементы с параллельной связью, также известные как четырехзвенный механизм. Следует понимать, что составные элементы сошника 18, такие как рамная опора 20, установочные кронштейны 22, первый элемент 24 и второй элемент 26 могут быть выполнены из любого подходящего материала, например, стали.
Цилиндр 28 прикреплен к переходнику 32 для хвостовика посредством штыря на конце штока поршня. Переходник 32 для хвостовика также соединен с хвостовиком 34 и инструментом 36 для взаимодействия с землей. Инструмент 36 для взаимодействия с землей соединен с хвостовиком 34 при помощи крепежных элементов 38, которые обеспечивают регулирование по высоте инструмента 36 для взаимодействия с землей, так что можно изменять глубину посева. Штырь 40 соединен с первым элементом 24 и переходником 32 для хвостовика, обеспечивая шарнирный поворот переходника 32 для хвостовика вокруг штыря 40 при выдвижении и втягивании цилиндра 28. Инструмент 36 для взаимодействия с землей, соответственно, перемещается вниз или вверх, основываясь на выдвижении или втягивании цилиндра 28. Переходник 32 для хвостовика может иметь несколько отверстий для приема штыря, соединяющего конец цилиндра 28 с переходником 32. Отверстия в переходнике могут использоваться для регулирования угла цилиндра 28 относительно узла с параллельной связью, изменяя тем самым угол и величину усилий цилиндра.
Перемещение вверх инструмента 36 для взаимодействия с землей может ограничиваться контактом между стопорной пластиной 42 и задней рамой 44. В данном варианте осуществления частичный сброс давления к поршневой полости цилиндра 28 может уменьшать направленное вниз усилие, прикладываемое к узлу 46 заделывающего колеса. Кроме того, прикладывание давления к штоковой полости цилиндра 28 поднимет узел 46 заделывающего колеса, и в конечном счете поднимет заделывающее колесо 48 от земли. В данном варианте осуществления узел 46 заделывающего колеса может обеспечивать регулирование по высоте заделывающего колеса 48 в виде крепежного элемента и щели или эквивалентной структуры. В некоторых случаях результирующее подъемное усилие может компенсировать увеличенное заделывающее усилие, вызываемое изменениями в возвышенности местности, повышая таким образом точность посева. Для обеспечения закладки семян во время работы инструмент 36 для взаимодействия с землей соединен с системой 50 доставки продукта через трубу 52.
В результате этой приведенной в качестве примера конфигурации сошника инструмент 36 для взаимодействия с землей может перемещаться между рабочим положением и нерабочим положением, основываясь на выдвижении и втягивании цилиндра 28. Как рассмотрено выше, втягивание цилиндра 28 в направлении 54 вызывает поворот инструмента 36 для взаимодействия с землей в направлении 56 вверх, извлекая тем самым инструмент 36 для взаимодействия с землей из почвы и переводя инструмент 36 в нерабочее положение или транспортное положение. Установка каждого инструмента 36 для взаимодействия с землей в нерабочее положение облегчает транспортировку посевного орудия 10, потому что инструмент 36 для взаимодействия с землей каждого сошника 18 больше не находится в контакте с почвой. Кроме того, как подробно рассмотрено ниже, поток продукта (например, семян, удобрения и т.д.) к сошникам 18 может быть временно приостановлен, когда инструменты 36 для взаимодействия с землей находятся в нерабочем положении. Следовательно, можно перемещать посевное орудие 10 по полю (например, разворачивать на поворотной полосе), не закладывая продукт в почву.
С другой стороны, каждый инструмент 36 для взаимодействия с землей может перемещаться в рабочее положение путем выдвижения цилиндра 28 в направлении 58, вызывая тем самым поворот инструмента 36 для взаимодействия с землей в направлении 60. Следует понимать, что пока инструмент 36 для взаимодействия с землей находится в рабочем положении, инструмент 36 может рыть в почве борозду при перемещении орудия 10 по полю. Как только борозда вырыта, при помощи системы 50 доставки продукта можно закладывать в почву посредством трубы 52 семена и/или удобрение. Заделывающее колесо 48 может затем закрывать борозду, формируя таким образом ряд семян, пригодный для развития культуры.
Как подробно рассмотрено ниже, трубопроводы для текучей среды могут быть проложены от устройства 30 подачи текучей среды к каждому из цилиндров 28 с параллельной компоновкой потока. Например, первый трубопровод может продолжаться до первой стороны каждого цилиндра 28, а второй трубопровод - до второй стороны. В такой конфигурации прикладывание давления текучей среды к первому трубопроводу вызовет выдвижение каждого цилиндра 28, а прикладывание давления текучей среды ко второму трубопроводу, вызовет втягивание каждого цилиндра 28. Мониторинг давления текучей среды в первом и/или втором трубопроводах может показывать, выдвигаются ли цилиндры 28 или втягиваются. Поскольку выдвижение и втягивание цилиндров 29 определяет положение инструментов 36 для взаимодействия с землей, уровень давления текучей среды может использоваться, чтобы определять, находятся ли инструменты 36 для взаимодействия с землей в рабочем положении или в нерабочем положении. В некоторых вариантах осуществления поток продукта к сошникам 18 может быть автоматически начат, когда инструменты 36 для взаимодействия с землей находятся в рабочем положении, и автоматически прекращен, когда инструменты 36 для взаимодействия с землей находятся в нерабочем положении.
На фиг.3 показан схематичный вид приведенного в качестве примера орудия 10, включающего в себя контроллер и датчики давления текучей среды, выполненные с возможностью определения положения инструментов для взаимодействия с землей. Как показано, первый трубопровод 62 для текучей среды и второй трубопровод 64 для текучей среды продолжаются от устройства 30 подачи текучей среды к каждому приводному цилиндру 28. Хотя показаны три приводных цилиндра 28, следует понимать, что в орудии 10 может быть применено больше или меньше цилиндров 28. Например, в некоторых конфигурациях для каждого сошника 18, чтобы перемещать каждый инструмент 36 для взаимодействия с землей между рабочим и нерабочим положениями, может применяться один приводной цилиндр 28. В альтернативных вариантах осуществления для перемещения всего орудия 10 между рабочим и нерабочим положениями путем поворота орудия в направлении вверх может применяться, например, единственный цилиндр 28. В дополнительных вариантах осуществления один приводной цилиндр 28 может быть соединен с каждой инструментальной рамой 16 и выполнен с возможностью поворота каждой инструментальной рамы 16 относительно бруса 14 для навешивания рабочих органов для перемещения сошников 18 между рабочим и нерабочим положениями. В каждом варианте осуществления цилиндры 28 могут быть выполнены в конфигурации с параллельным потоком, в которой каждый цилиндр 28 непосредственно соединен с устройством 30 подачи текучей среды при помощи первого трубопровода 62 и второго трубопровода 64. Другими словами, текучая среда не течет от одного цилиндра 28 к другому в конфигурации с последовательным потоком.
Как показано, первый трубопровод 62 для текучей среды соединен с первой стороной каждого цилиндра 28, а второй трубопровод 64 для текучей среды соединен со второй стороной каждого цилиндра 28. В данном варианте осуществления, первый трубопровод 62 для текучей среды соединен с поршневой стороной 66 каждого цилиндра 28, а второй трубопровод 64 для текучей среды соединен со штоковой стороной 68 цилиндра 28. Следовательно, прикладывание давления текучей среды к первому трубопроводу 62 вызывает выдвижение цилиндра 28 в направлении 58, а прикладывание давления текучей среды ко второму трубопроводу 64 вызывает втягивание цилиндра 28 в направлении 54. Следует понимать, что в альтернативных вариантах осуществления цилиндр 28 может быть перевернут так, что первый трубопровод 62 для текучей среды будет соединен со штоковой стороной 68, а второй трубопровод 64 для текучей среды будет соединен с поршневой стороной 66. В таком варианте осуществления прикладывание давления текучей среды к первому трубопроводу 62 для текучей среды будет вызывать втягивание цилиндра 28 в направлении 54, а прикладывание давления текучей среды ко второму трубопроводу 64 будет вызывать выдвижение цилиндра 28 в направлении 58.
Как показано, приводные цилиндры 28 включают в себя гильзу 70, имеющую торцевую крышку 72, сальник 74 и поршень 76. Следует понимать, что поршневая полость 66 определяется объемом, образованным поршнем 76, гильзой 70 и торцевой крышкой 72, а штоковая полость 68 определяется объемом, образованным поршнем 76, гильзой 70 и сальником 74. Кроме того, шток 78 соединен с поршнем 76 так, что перемещение поршня 76 приводит к тому, что шток 78 сдвигается в направлении 54 и/или 58. Как следует понимать далее, между штоком 78 и сальником 74 для блокирования выхода потока текучей среды из цилиндра 28 могут применяться различные уплотнения. Кроме того, поршень 76 включает в себя дополнительные уплотнения для блокирования потока текучей среды между поршневой стороной 66 и штоковой стороной 68 цилиндра 28. В данном варианте осуществления прикладывание давления текучей среды к первому трубопроводу 62 увеличивает давление к поршневой стороне 66 цилиндра 28, приводя тем самым поршень 76 и шток 78 в движение в направлении 58. С другой стороны, прикладывание давления текучей среды ко второму трубопроводу 64 увеличивает давление к штоковой стороне 68 цилиндра 28, приводя тем самым поршень 76 и шток 78 в движение в направлении 54. Следует понимать, что увеличение давления в одном трубопроводе может сопровождаться уменьшением давления в другом трубопроводе для облегчения перемещения поршня 76 в гильзе 70. Также следует понимать, что цилиндры 28 могут быть в частности выполнены с возможностью работы на основании пневматического или гидравлического давления текучей среды.
Как рассмотрено выше, выдвижение цилиндра 28 в направлении 58 вызывает поворот инструмента 36 для взаимодействия с землей в направлении 60 вниз, тем самым зацепляя почву. Следовательно, увеличение давления текучей среды в первом трубопроводе 62 и уменьшение давления текучей среды во втором трубопроводе 64 вызывает перемещение инструмента 36 для взаимодействия с землей в рабочее положение. Напротив, втягивание цилиндра 28 в направлении 54 вызывает поворот инструмента 36 для взаимодействия с землей в направлении 56 вверх, тем самым расцепляясь с почвой. Поэтому, увеличение давления текучей среды во втором трубопроводе 64 и уменьшение давления текучей среды в первом трубопроводе 62 вызывает перемещение инструмента 36 для взаимодействия с землей в нерабочее положение. В результате этого, мониторинг давлений в первом трубопроводе 62 и втором трубопроводе 64 может обеспечивать указание на то, перемещается ли инструмент 36 для взаимодействия с землей в рабочее положение или нерабочее положение.
Настоящее изобретение включает в себя первый датчик 80 давления, соединенный с первым трубопроводом 62, и второй датчик 82 давления, соединенный со вторым трубопроводом 64. Датчики 80 и 82 давления выполнены с возможностью мониторинга давления текучей среды в трубопроводах 62 и 64, соответственно. Следует понимать, что датчики 80 и 82 давления могут включать в себя любую подходящую конфигурацию датчиков давления, как например, волоконно-оптический датчик или датчик на основании микроэлектромеханических систем и т.п. В некоторых вариантах осуществления каждый датчик 80 и/или 82 может быть представлен множеством датчиков (например, одним, двумя, тремя, четырьмя, пятью, шестью или больше), выполненными с возможностью измерения давления текучей среды в одной или более областях соответствующих трубопроводов 62 и/или 64. В данном варианте осуществления датчики 80 и 82 давления размещены довольно высоко по потоку относительно цилиндра 28, так что датчики 80 и 82 измеряют общее давление в первом трубопроводе 62 и втором трубопроводе 64. Таким образом, колебания давления между цилиндрами 28 могут быть выровнены до измерения датчиками 80 и 82. Как показано, датчики 80 и 82 давления соединены с возможностью сообщения с контроллером 84 орудия и выполнены с возможностью отправки контроллеру 84 орудия сигнала, указывающего давление в трубопроводах 62 и 64.
Контроллер 84 орудия выполнен с возможностью определения на основании сигнала, передаваемого датчиками 80 и 82, находятся ли инструменты 36 для взаимодействия с землей в рабочем положении или нерабочем положении. В некоторых вариантах осуществления контроллер 84 орудия может быть выполнен с возможностью определения увеличения давления в первом трубопроводе 62 или втором трубопроводе 64, чтобы определять положение инструментов 36 для взаимодействия с землей. Например, оператор может перемещать инструменты 36 для взаимодействия с землей в рабочее положение путем увеличения давления в первом трубопроводе 62 и уменьшения давления во втором трубопроводе 64 (например, путем регулирования направляющего клапана в буксировочном транспортном средстве). Следовательно, первый датчик 80 будет определять увеличение давления в первом трубопроводе 62 и отправлять контроллеру 84 сигнал, указывающий на увеличение давления. Контроллер 84 затем будет сравнивать давление, определенное в первом трубопроводе 62, с пороговым значением, указывающим, что инструменты 36 для взаимодействия с землей перемещаются в рабочее положение. Если определяемое давление больше порогового значения, контроллер 84 будет выдавать сигнал, указывающий, что инструменты 36 для взаимодействия с землей перемещаются в рабочее положение.
Аналогичным образом, оператор может перемещать инструменты 36 для взаимодействия с землей в нерабочее положение путем увеличения давления во втором трубопроводе 64 и уменьшения давления в первом трубопроводе 62. Следовательно, второй датчик 82 будет определять увеличение давления во втором трубопроводе 64 и отправлять контроллеру 84 сигнал, указывающий на увеличение давления. Контроллер 84 затем будет сравнивать давление, определенное во втором трубопроводе 64, с пороговым значением, указывающим, что инструменты 36 для взаимодействия с землей перемещаются в нерабочее положение. Если определяемое давление больше порогового значения, контроллер 84 будет выдавать сигнал, указывающий, что инструменты 36 для взаимодействия с землей перемещаются в нерабочее положение.
С помощью мониторинга увеличения давления в трубопроводах 62 и 64 для текучих сред или в участке контура для текучей среды, сообщающегося с трубопроводами, можно устанавливать перемещение между положениями вскоре после того, как оператор начинает перемещение. Например, когда инструменты 36 для взаимодействия с землей находятся в рабочем положении, инструменты 36 располагаются в почве. Следовательно, поскольку текучая среда подается к штоковой полости 68 цилиндров 28 во время перемещения в нерабочее положение, давление во втором трубопроводе 64 быстро увеличивается благодаря подъему инструментов 36 для взаимодействия с землей из почвы. В некоторых конфигурациях пороговое значение, указывающее на перемещение в нерабочее положение, может быть ниже давления, достаточного чтобы поднимать инструменты 36 для взаимодействия с землей из почвы. В результате этого контроллер 84 может определять перемещение в нерабочее положение до того, как инструменты 36 для взаимодействия с землей расцепляются с почвой. Как подробно рассмотрено выше, определение перемещения в нерабочее положение вскоре после того, как перемещение начато, может обеспечивать системе 50 доставки продукта выключение потока продукта до завершения перемещения, существенно сокращая тем самым или устраняя возможность распределения продукта инструментами 36 для взаимодействия с землей в нерабочем положении.
Аналогичным образом, когда инструменты 36 для взаимодействия с землей находятся в нерабочем положении, инструменты 36 размещены над почвой. Следовательно, когда текучая среда подается к поршневой полости 66 цилиндров 28 во время перемещения в рабочее положение, давление в первом трубопроводе 62 быстро увеличивается вследствие противодействия между инструментами 36 для взаимодействия с землей и почвой, так как инструменты 36 для взаимодействия с землей находятся в контакте с почвой. В некоторых конфигурациях пороговое значение, указывающее на перемещение в рабочее положение, может быть ниже давления, достаточного, чтобы вводить инструменты для взаимодействия с землей 36 в почву. В результате этого контроллер 84 может определять перемещение в рабочее положение до того, как инструменты 36 для взаимодействия с землей зацепят почву. Как подробно рассмотрено ниже, определение перемещения в рабочее положение вскоре после того, как начато перемещение, может обеспечивать системе 50 доставки продукта включение потока продукта до завершения перемещения, гарантируя таким образом, что поток продукта из инструментов 36 для взаимодействия с землей начинается, как только инструменты 36 находятся в надлежащем положении для закладки продукта.
В альтернативных вариантах осуществления для определения перемещения между рабочим положением и нерабочим положением может применяться единственный датчик 80 или 82 давления. Например, в некоторых вариантах осуществления только первый датчик 80 давления может использоваться для измерения давления в первом трубопроводе 62. Как рассмотрено выше, во время перемещения в рабочее положение давление в первом трубопроводе 62 увеличивается, а во втором трубопроводе 64 уменьшается. Напротив, во время перемещения в нерабочее положение давление в первом трубопроводе 62 уменьшается, а во втором трубопроводе 64 увеличивается. Следовательно, первый датчик 80 давления может отправлять контроллеру 84 орудия сигнал, указывающий на увеличение давления во время перемещения в рабочее положение, и уменьшение давления во время перемещения в нерабочее положение. Контроллер 84 может сравнивать давление в первом трубопроводе 62 с минимальным пороговым значением, чтобы определять, перемещаются ли инструменты 36 для взаимодействия с землей в нерабочее положение, и сравнивать давление в первом трубопроводе 62 с максимальным пороговым значением, чтобы определять, перемещаются ли инструменты 36 для взаимодействия с землей в рабочее положение. Таким образом, для определения положения инструментов 36 для взаимодействия с землей может использоваться единственный датчик 80. В дополнительных вариантах осуществления аналогичным образом для определения положения инструментов 36 для взаимодействия с землей может использоваться единственный датчик 82, соединенный со вторым трубопроводом 64 для текучей среды.
В некоторых вариантах осуществления контроллер 84 может не только сравнивать давление в первом трубопроводе 62 и/или втором трубопроводе 64 с пороговым значением, но также проверять перед отправкой сигнала, указывающего на перемещение, что давление остается за пределами порогового значения в течение пороговой длительности. Например, если датчик 80 давления определяет увеличение давления в первом трубопроводе 62 для текучей среды, контроллер 84 может задерживать отправку сигнала, указывающего на перемещение в рабочее положение до тех пор, пока давление не остается за пределами порогового значения в течение конкретной длительности. С такой конфигурацией можно существенно сокращать или устранять возможность того, что контроллер 84 отправит неточный сигнал, указывающий положение инструментов 36 для взаимодействия с землей. Например, если инструменты 36 для взаимодействия с землей наталкиваются на препятствие в почве (например, камень, корень и т.д.), инструмент 36 может поворачиваться к нерабочему положению. Однако, как только препятствие было удалено, инструмент 36 будет поворачиваться обратно в рабочее положение. В таких ситуациях благодаря задержке сигнала контроллер 84 может непрерывно выдавать сигнал, указывающий, что инструменты 36 находятся в рабочем положении. С такой конфигурацией можно гарантировать, что к сошникам 18 обеспечивается непрерывная подача продукта, даже если один или более инструментов 36 для взаимодействия с землей наталкиваются на препятствие.
Как показано, контроллер 84 орудия соединен с возможностью сообщения с контроллером 86 продукта в устройстве 88 подачи продукта. Устройство 88 подачи продукта включает в себя ранее рассмотренную систему 50 доставки продукта, выполненную с возможностью доставки продукта (например, семян, удобрения и т.д.) к сошникам 18. Как только контроллер 84 орудия определяет, что произошло перемещение, контроллер 84 отправляет контроллеру 86 продукта сигнал, указывающий на положение инструментов 36 для взаимодействия с землей. Контроллер 86 продукта затем отрегулирует поток продукта из системы 50 доставки продукта к сошникам 18. Например, если давление в первом трубопроводе 62 увеличивается выше порогового значения в течение пороговой длительности, контроллер 84 орудия может послать контроллеру 86 продукта сигнал, указывающий, что инструменты 36 для взаимодействия с землей перемещаются в рабочее положение. Затем контроллер 86 продукта может включать систему 50 доставки продукта, подавая таким образом к сошникам 18 продукт. Следует понимать, что между приведением в действие системы 50 доставки продукта и потоком продукта из инструментов 36 для взаимодействия с землей может быть временная задержка. Как рассмотрено выше, контроллер 84 может быть выполнен с возможностью определения перемещения в рабочее положение до того, как инструменты 36 для взаимодействия с землей достигнут надлежащей глубины для закладки продукта. В некоторых вариантах осуществления временная задержка между определением перемещения и достижением надлежащей глубины может быть по существу равной временной задержке между приведением в действие системы 50 доставки продукта и потоком продукта из инструментов 36 для взаимодействия с землей. В результате этого продукт может распределяться из сошников 18, как только инструменты 36 для взаимодействия с землей находятся на месте, существенно сокращая тем самым или устраняя растраченный понапрасну продукт, который может быть доставлен на ненадлежащую глубину.
Аналогичным образом, если давление во втором трубопроводе 64 увеличивается выше порогового значения в течение пороговой длительности, контроллер 84 орудия может отправлять контроллеру 86 продукта сигнал, указывающий, что инструменты для взаимодействия 36 с землей перемещаются в нерабочее положение. Контроллер 86 продукта может затем выключать систему 50 доставки продукта, останавливая таким образом поток продукта к сошникам 18. Аналогично временной задержке, описанной выше, следует понимать, что между выводом из работы системы 50 доставки продукта и прекращением потока продукта из инструментов 36 для взаимодействия с землей может быть временная задержка. Как рассмотрено выше, контроллер 84 может быть выполнен с возможностью определения перемещения в нерабочее положение до того, как инструменты 36 для взаимодействия с землей покинут почву. В некоторых вариантах осуществления время между определением перемещения и извлечением из почвы может быть по существу равным временной задержке между выводом из действия системы 50 доставки продукта и прекращением потока продукта из инструментов 36 для взаимодействия с землей. В результате этого поток продукта может быть прекращен до того, как инструменты 36 для взаимодействия с землей расцепятся с почвой, существенно сокращая тем самым или устраняя потраченный понапрасну продукт, который может доставляться на ненадлежащую глубину.
В данном варианте осуществления поток продукта также регулируется оператором в буксировочном транспортном средстве 90. А именно, оператор может выбирать режим доставки продукта посредством пользовательского интерфейса 92, который соединен с возможностью сообщения с контроллером 84 орудия и контроллером 86 продукта. Например, оператор может задействовать режим доставки продукта, так что контроллер 86 продукта может автоматически включать или выключать поток продукта к сошникам 18, основываясь на положение инструментов 36 для взаимодействия с землей. В качестве альтернативы, оператор может выключать режим доставки продукта, так что продукт не будет распределяться из системы 50 доставки продукта независимо от положения инструмента для взаимодействия с землей. В некоторых вариантах осуществления оператор через взаимодействие с пользовательским интерфейсом 92 может вручную управлять потоком продукта. С такой конфигурацией можно гарантировать, что к сошникам 18 во время каждой фазы операций посадки и/или посева обеспечивается надлежащий поток продукта.
На фиг.4 показана блок-схема последовательности операций приведенного в качестве примера способа 94 эксплуатации орудия 10 для автоматического регулирования потока продукта к инструментам 36 для взаимодействия с землей на основании измерения давления текучей среды. Во-первых, как показано блоком 96, измеряют давление в первом трубопроводе 62 для текучей среды. Как рассмотрено выше, положение инструментов 36 для взаимодействия с землей может быть определено путем измерения давления текучей среды в первом трубопроводе 62, втором трубопроводе 64 или комбинации двух трубопроводов 62 и 64. Хотя в показанном сейчас способе 94 давление текучей среды измеряют в двух трубопроводах 62 и 64, следует понимать, что в альтернативных вариантах осуществления давление может измеряться в единственном трубопроводе 62 или 64.
Затем, как показано блоком 98, измеренное давление в первом трубопроводе 62 сравнивается с пороговым значением, указывающим на перемещение в рабочее положение. Если давление в первом трубопроводе 62 больше порогового значения, в способе 94 приступают к этапу 100, на котором продолжительность времени, когда давление превышает пороговое значение, сравнивается с пороговой длительностью. Если давление в первом трубопроводе 62 превышает пороговое значение в течение пороговой длительности, то состояние орудия устанавливается в рабочий режим, как показано блоком 102. Как рассмотрено выше, оператор может задействовать режим доставки продукта посредством пользовательского интерфейса 92 в буксировочном транспортном средстве 90. Как показано блоком 104, если запущен режим доставки продукта, то продукт доставляется к инструментам 36 для взаимодействия с землей, как показано блоком 106.
Поток продукта может быть прекращен, как только инструменты 36 для взаимодействия с землей перемещены в нерабочее положение. Как рассмотрено выше, увеличение давления во втором трубопроводе 64 может указывать на перемещение в нерабочее положение. Следовательно, как показано блоком 107, во втором трубопроводе 64 измеряют давление, и давление сравнивается с пороговым значением, указывающим на перемещение в нерабочее положение, как показано блоком 108. Если давление во втором трубопроводе 64 больше порогового значения, в способе 94 приступают к этапу 110, на котором продолжительность времени, когда давление превышает пороговое значение, сравнивается с пороговой длительностью. Если давление во втором трубопроводе 64 превышает пороговое значение в течение пороговой длительности, то состояние орудия устанавливается в нерабочий режим, как показано блоком 112. Затем, как показано блоком 114, прекращается доставка продукта к инструментам 36 для взаимодействия с землей. В способе 94 затем приступают к блоку 96, где процесс повторяется.
Хотя в настоящем способе 94 определяют, перемещаются ли инструменты 36 для взаимодействия с землей в рабочее положение на основании давления в первом трубопроводе 62, следует понимать, что в альтернативных вариантах осуществления может использоваться давление во втором трубопроводе 64. Например, уменьшение давления во втором трубопроводе 64 может указывать на перемещение в рабочее положение. Следовательно, в некоторых вариантах осуществления, чтобы определять, перемещаются ли инструменты 36 для взаимодействия с землей в рабочее положение, может использоваться давление во втором трубопроводе 64. Кроме того, хотя в настоящем способе 94 определяют, перемещаются ли инструменты 36 для взаимодействия с землей в нерабочее положение на основании давления во втором трубопроводе 64, следует понимать, что в альтернативных вариантах осуществления может использоваться давление в первом трубопроводе 62. Например, уменьшение давления в первом трубопроводе 62 может указывать на перемещение в нерабочее положение. Следовательно, в некоторых вариантах осуществления, чтобы определить, перемещаются ли инструменты 36 для взаимодействия с землей в рабочее положение, может использоваться давление в первом трубопроводе 62.
В дополнительных вариантах осуществления этапы 100 и/или 110 могут быть опущены, так что состояние орудия устанавливается в рабочий режим или нерабочий режим без времени ожидания, связанного со сравнением превышенного порогового значения с пороговой длительностью. Такие варианты осуществления могут обеспечивать более быстрые перемещения между режимами, но могут не учитывать случайный контакт между инструментами 36 для взаимодействия с землей и препятствием в почве. В других дополнительных вариантах осуществления могут опускаться этапы доставки продукта, как показано блоком 106, и прекращение доставки продукта, как показано блоком 114. Например, вместо регулирования непосредственно потока продукта к инструментам 36 для взаимодействия с землей по способу можно сохранять положение инструментов 36 для взаимодействия с землей в регистраторе данных для более позднего анализа и/или обеспечивать указание оператору положения инструмента через пользовательский интерфейс 92.
Следует отметить, что хотя вышеприведенное описание ссылается на определение давлений в трубопроводах для текучих сред, следует понимать, что термин включает в себя любой из ряда элементов доставки текучих сред между насосом и цилиндром. То есть, давление может измеряться в направляющей или иной клапанной системе, в фитингах, в том числе специализированных фитингах для датчиков давления, металлических трубах или мягких шлангах и самом цилиндре. Некоторые из них могут быть предпочтительней других, в зависимости от физической компоновки машины, типа используемого датчика, типа используемых элементов, требуемой маршрутизации сигналов о давлении и так далее.
Аналогичным образом, хотя некоторые из элементов будут на буксируемом орудии и встроены в него, другие могут быть либо на орудии, либо на буксировочном транспортном средстве. Например, на тракторе могут быть расположены схемы обработки, схемы управления и так далее, выполненные с возможностью получения сигналов о давлении посредством подходящих разъемов. Например, датчики, выполненные с возможностью измерения давления в трубопроводах для текучей среды, могут быть выполнены с возможностью отправки сигнала контроллеру в буксировочном транспортном средстве для определения положения инструментов для взаимодействия с землей. Такой сигнал может передаваться через подходящий интерфейс, такой, например, как шина CAN. Подразумевается, что прилагаемая формула изобретения охватывает все такие средства.
Хотя здесь были показаны и описаны только некоторые признаки изобретения, специалистам в данной области техники будут очевидны множество дополнений и изменений. Поэтому, следует понимать, что прилагаемая формула изобретения охватывает все такие дополнения и изменения.
Изобретение относится к области сельского хозяйства и может быть использовано в сеялках. Система сельскохозяйственного орудия содержит в одном варианте инструмент для взаимодействия с землей, выполненный с возможностью зацепления почвы в рабочем положении и расцепления с почвой в нерабочем положении. С инструментом для взаимодействия с землей соединен приводной цилиндр, который перемещает данный инструмент между его рабочим положением и нерабочим положением на основании потока текучей среды из системы подачи текучей среды. В системе подачи текучей среды установлен по меньшей мере один датчик, выполненный с возможностью выдачи сигнала, указывающего давление текучей среды в этой системе. Кроме того, имеется контроллер, выполненный с возможностью определения на основании сигнала, указывающего давление текучей среды, находится ли инструмент для взаимодействия с землей в рабочем положении или в нерабочем положении. При этом приводной цилиндр содержит первую сторону, питаемую первым трубопроводом для текучей среды, и вторую сторону, питаемую вторым трубопроводом для текучей среды. Увеличение давления текучей среды к первой стороне вызывает перемещение инструмента для взаимодействия с землей в рабочее положение, а увеличение давления текучей среды ко второй стороне вызывает перемещение инструмента для взаимодействия с землей в нерабочее положение. При этом система содержит первый датчик, сообщающийся по текучей среде с первым трубопроводом для текучей среды и выполненный с возможностью выдачи сигнала, указывающего давление текучей среды в первой стороне приводного цилиндра, и второй датчик, сообщающийся по текучей среде со вторым трубопроводом для текучей среды и выполненный с возможностью выдачи сигнала, указывающего давление текучей среды во второй стороне приводного цилиндра, или их комбинацию. В другом варианте система сельскохозяйственного орудия имеет множество указанных инструментов и приводных цилиндров. Изобретение позволит уменьшить расход распределяемого по полю продукта при упрощении конструкции. 3 н. и 13 з.п. ф-лы, 4 ил.
1. Система сельскохозяйственного орудия, содержащая:
инструмент для взаимодействия с землей, выполненный с возможностью зацепления почвы в рабочем положении и расцепления с почвой в нерабочем положении;
приводной цилиндр, соединенный с инструментом для взаимодействия с землей и выполненный с возможностью перемещения инструмента для взаимодействия с землей между рабочим положением и нерабочим положением на основании потока текучей среды из системы подачи текучей среды;
по меньшей мере один датчик, выполненный с возможностью выдачи сигнала, указывающего давление текучей среды в системе подачи текучей среды; и
контроллер, выполненный с возможностью определения на основании сигнала, находится ли инструмент для взаимодействия с землей в рабочем положении или в нерабочем положении,
при этом приводной цилиндр содержит первую сторону, питаемую первым трубопроводом для текучей среды, и вторую сторону, питаемую вторым трубопроводом для текучей среды, причем увеличение давления текучей среды к первой стороне вызывает перемещение инструмента для взаимодействия с землей в рабочее положение, а увеличение давления текучей среды ко второй стороне вызывает перемещение инструмента для взаимодействия с землей в нерабочее положение,
при этом система содержит первый датчик, сообщающийся по текучей среде с первым трубопроводом для текучей среды и выполненный с возможностью выдачи сигнала, указывающего давление
текучей среды в первой стороне приводного цилиндра, второй датчик, сообщающийся по текучей среде со вторым трубопроводом для текучей среды и выполненный с возможностью выдачи сигнала, указывающего давление текучей среды во второй стороне приводного цилиндра, или их комбинацию.
2. Система по п. 1, в которой контроллер выполнен с возможностью выдачи сигнала, указывающего на то находится ли инструмент для взаимодействия с землей в рабочем положении или нерабочем положении, на основании сигнала от первого датчика, второго датчика или их комбинации.
3. Система по п. 2, в которой контроллер выполнен с возможностью сравнения давления текучей среды в первой стороне приводного цилиндра, давления текучей среды во второй стороне приводного цилиндра или их комбинацию с одним или более пороговыми значениями для определения, находится ли инструмент для взаимодействия с землей в рабочем положении или нерабочем положении.
4. Система по п. 3, в которой контроллер выполнен с возможностью выдачи сигнала, указывающего на то, находится ли инструмент для взаимодействия с землей в рабочем положении или нерабочем положении, только если давление текучей среды в первой стороне приводного цилиндра, давление текучей среды во второй стороне приводного цилиндра или их комбинация находится за пределами одного или более пороговых значений в течение пороговой длительности.
5. Система по п. 1, содержащая множество инструментов для взаимодействия с землей, присоединенных к раме, при этом приводной цилиндр выполнен с возможностью перемещения множества инструментов для взаимодействия с землей между рабочим положением и нерабочим положением поворотом рамы.
6. Система сельскохозяйственного орудия, содержащая:
множество инструментов для взаимодействия с землей, каждый из которых выполнен с возможностью зацепления почвы в рабочем положении и расцепления с почвой в нерабочем положении;
множество приводных цилиндров, каждый из которых соединен с одним или более инструментами для взаимодействия с землей, при этом каждый приводной цилиндр содержит первую сторону, питаемую первым трубопроводом для текучей среды, и вторую сторону, питаемую вторым трубопроводом для текучей среды, причем увеличение давления текучей среды к первой стороне вызывает перемещение одного или более инструментов для взаимодействия с землей приводным цилиндром в рабочее положение, а увеличение давления текучей среды ко второй стороне вызывает перемещение одного или более инструментов для взаимодействия с землей приводным цилиндром в нерабочее положение;
первый датчик, сообщающийся по текучей среде с первым трубопроводом для текучей среды и выполненный с возможностью выдачи первого сигнала, указывающего общее давление текучей среды в первой стороне множества приводных цилиндров, второй датчик, сообщающийся по текучей среде со вторым трубопроводом для текучей среды и выполненный с возможностью выдачи второго сигнала, указывающего общее давление текучей среды во второй стороне множества приводных цилиндров, или их комбинацию; и
контроллер, выполненный с возможностью определения на основании первого сигнала, второго сигнала или их комбинации, находится ли множество инструментов для взаимодействия с землей в рабочем положении или нерабочем положении.
7. Система по п. 6, в которой контроллер выполнен с возможностью выдачи сигнала, указывающего на то, что множество инструментов для взаимодействия с землей входят в рабочий режим, если общее давление текучей среды в первой стороне множества приводных цилиндров превышает первое пороговое значение, если общее давление текучей среды во второй стороне множества приводных цилиндров уменьшается ниже второго порогового значения, или их комбинацию.
8. Система по п. 7, в которой контроллер выполнен с возможностью задержки выдачи сигнала до тех пор, пока общее давление текучей среды в первой стороне множества приводных цилиндров не превышает первого порогового значения, общее давление текучей среды во второй стороне множества приводных цилиндров не уменьшается ниже второго порогового значения или их комбинацию в течение пороговой длительности.
9. Система по п. 6, в которой контроллер выполнен с возможностью выдачи сигнала, указывающего на то, что множество инструментов для взаимодействия с землей входят в нерабочий режим, если общее давление текучей среды во второй стороне множества приводных цилиндров превышает первое пороговое значение, если общее давление текучей среды в первой стороне множества приводных цилиндров уменьшается ниже второго порогового значения или их комбинацию.
10. Система по п. 9, в которой контроллер выполнен с возможностью задержки выдачи сигнала до тех пор, пока общее давление текучей среды во второй стороне множества приводных цилиндров не превышает первого порогового значения, общее давление текучей среды в первой стороне множества приводных цилиндров не уменьшается ниже второго порогового значения, или их комбинацию в течение пороговой длительности.
11. Система по п. 6, в которой каждый приводной цилиндр соединен с одним инструментом для взаимодействия с землей.
12. Система по п. 6, в которой контроллер выполнен с возможностью выдачи устройству подачи продукта сигнала, указывающего положение множества инструментов для взаимодействия с землей, при этом устройство подачи продукта выполнено с возможностью доставки продукта к множеству инструментов для взаимодействия с землей при получении сигнала, указывающего, что множество инструментов для взаимодействия с землей входят в рабочее положение, и прекращения доставки продукта к инструментам для взаимодействия с землей при получении сигнала, указывающего, что множество инструментов для взаимодействия с землей входят в нерабочее положение.
13. Система по п. 6, в которой контроллер соединен с сельскохозяйственным орудием.
14. Способ эксплуатации системы сельскохозяйственного орудия, включающий этапы, на которых:
измеряют давление в первом трубопроводе для текучей среды, продолжающемся к первой стороне приводного цилиндра, соединенного с инструментом для взаимодействия с землей, при этом приводной цилиндр выполнен с возможностью перемещения инструмента для взаимодействия с землей между рабочим положением и нерабочим положением;
измеряют давление во втором трубопроводе для текучей среды, продолжающемся ко второй стороне приводного цилиндра;
выдают первый сигнал, указывающий рабочий режим эксплуатации, если давление в первом трубопроводе для текучей среды находится за пределами первого порогового значения, указывающего, что инструмент для взаимодействия с землей входит в рабочее положение; и
выдают второй сигнал, указывающий нерабочий режим эксплуатации, если давления в первом трубопроводе для текучей среды и во втором трубопроводе для текучей среды находятся за пределами второго порогового значения, указывающего, что инструмент для взаимодействия с землей входит в нерабочее положение.
15. Способ по п. 14, в котором задерживают выдачу первого сигнала до тех пор, пока давление в первом трубопроводе для текучей среды не находится за пределами первого порогового значения в течение пороговой длительности.
16. Способ по п. 14, в котором задерживают выдачу второго сигнала до тех пор, пока давление во втором трубопроводе для текучей среды не находится за пределами второго порогового значения в течение пороговой длительности.
| US 20090079624 A1, 26.03.2009 | |||
| Прибор для отбирания средней пробы из нефтехранилищ | 1928 |
|
SU12366A1 |
| US 7588089 B2, 15.09.2009 | |||
| Регулятор гидросистемы управления сельскохозяйственными орудиями | 1990 |
|
SU1764533A1 |
| DE 10330344 A1, 24.02.2005. | |||

