Область техники, к которой относится изобретение
Настоящее изобретение относится к дистанционному управлению высокоавтоматизированным транспортным средством (ВАТС), а более конкретно к мониторингу и управлению работой транспортного средства, дистанционному заданию маршрутов, смене маршрутов, чтобы повысить эффективность и безопасность движения ВАТС.
Уровень техники
Из уровня техники известно достаточно много различных диспетчерских пунктов с дистанционным управлением, например, известна система управления транспортным средством (FR 2866746 A1, G06F 19/00, опубл. 26.08.2005), содержащая блоки оповещения, когда скорость транспортного средства превышает один из контрольных пределов скорости.
Описанное изобретение позволяет фиксировать и передавать в центр мониторинга текущее положение транспортного средства посредством его оборудования такими навигационными системами как GPS, с большой погрешностью до 20/30 метров. Данным решением не предусмотрены механизмы формирования оптимального маршрута и механизмы автоматической корректировки маршрута при возникновении непредвиденных факторов (препятствия, люди или другие транспортные средства).
Известна система и способ оптимизации рейса для транспортного средства (RU 2481988 C2, B61L 3/00, опубл. 20.05.2013), включающие базу данных на борту транспортного средства для хранения характеристической информации для каждого из множества различных типов топлива, при этом транспортное средство содержит двигатель, сконфигурированный для работы на множестве различных типов топлива, процессор на борту транспортного средства, сконфигурированный для приема информации из упомянутой базы данных, алгоритм, осуществленный в рамках процессора, имеющий доступ к информации из базы данных о множестве различных типов топлива и сконфигурированный, чтобы создать план рейса, содержащий, по меньшей мере, одну из установок мощности или торможения для управления транспортным средством, когда оно следует согласно указанному рейсу, причем алгоритм дополнительно сконфигурирован для создания плана рейса для минимизации общего расхода топлива из множества различных видов топлива и в соответствии с одним или более рабочим критерием для указанного транспортного средства.
В данном решении способ управления транспортным средством содержит этапы, на которых определяется местоположение транспортного средства и собирается информация о территории нахождения транспортного средства, что вносит задержку в скорость реакции на изменение внешних факторов. Также решение распространяется на железнодорожный состав/локомотив и другие транспортные средства, включающие в себя внедорожные и морские транспортные средства, которые, ввиду физических ограничений устройства двигателя, имеют ограничения по времени завершения выполнения управляющего воздействия от диспетчерской системы.
За прототип взят способ автоматизированного управления эксплуатацией беспилотного воздушного судна (БВС) в общем воздушном пространстве для обеспечения безопасного полета с выявлением случаев несанкционированного изменения трафика полета (RU 2662611 C1, G05D 1/00, опубл. 26.07.2018) при помощи использования бортовой автоматической системы управления, спутниковой навигационной системы, высокоточных синхронизированных часов, а также бортового вычислителя и приемо-передающей радиостанции, с помощью которой осуществляется цифровая радиосвязь с базовой радиостанцией, со стационарным или подвижным пунктами управления, которые оборудованы автоматизированным рабочим местом диспетчера, отличающийся тем, что параметры трафика своего полета, измеренные с использованием спутниковой навигационной системы, а также информация, полученная по линии связи о трафиках полета других беспилотных воздушных судов, каждое беспилотное воздушное судно передает стационарным или подвижным пунктами управления, причем полученная информация о трафиках полета других БВС обрабатывается, например, используя принцип Доплера, для уточнения реальных координат других БВС, при этом эти данные также передаются по каналу связи в службу управления воздушным движением, которая использует эти данные для контроля управления полетом беспилотного авиационного судна и обеспечения возможности безаварийного продолжения полета, а также выявления случаев получения недостоверной информации о трафике полета с БВС, которые отклоняются от санкционированного трафика полета, а при необходимости для обеспечения безопасности полетов корректируют трафики полетов таких БВС, а в случае невозможности корректировки полета БВС, например, когда недостоверная информация с БВС передается умышленно, информация о времени потери управления с таким БВС и параметрах его движения, планируемом трафике полета, а также технические данные в режиме онлайн передаются в службу пресечения несанкционированного полета БВС, причем к санкционированным полетам допускаются лишь БВС, зарегистрированные на специальном портале, где отражается вся информация о БВС на протяжении всего его жизненного цикла.
Решение предназначено для контроля исполнения маршрута БВС, которое позволяет сигнализировать о возникновении несанкционированных маршрутов и о коллизиях маршрутов многочисленных БВС. Сами же маршруты назначаются собственными системами БВС (пунктами управления), и информация о них передается в службу управления воздушным движением для контроля управления полетом. Это общесистемное, инфраструктурное решение, не содержащее алгоритмов поведения при возникновении локальных, непредвиденных факторов (заграждения, другие БВС и так далее) на пути следования по маршруту, так же, как и не содержащее алгоритмов автоматической корректировки маршрутов при возникновении таких факторов.
Раскрытие сущности изобретения
Технической задачей заявляемого изобретения является создание способа дистанционного управления высокоавтоматизированным транспортным средством.
Техническим результатом является возможность одновременного дистанционного управления более чем одним высокоавтоматизированным транспортным средством и обеспечение короткого времени реакции на происшествия (ограничение накладывается только задержкой в сетях передачи данных) в процессе выполнения рейсов.
Указанный технический результат достигается при помощи заявленного способа дистанционного управления высокоавтоматизированным транспортным средством, содержащего вычислительный модуль высокоавтоматизированного транспортного средства, к которому подключены модем, посредством которого осуществляется передача данных по сетям мобильной связи 3G/LTE/5G, используя сетевой стек протоколов TCP/IP и UDP и сенсоры, такие как сонары, лидары, датчики скорости и местоположения, при этом на вычислительном модуле высокоавтоматизированного транспортного средства данные от сенсоров считываются из файловых дескрипторов устройства автопилота, входящего в состав вычислительного модуля, и, путем копирования через оперативную память, передаются в облачный агент, который, в свою очередь, копирует данные сенсоров из оперативной памяти и отправляет по сетям 3G/LTE/5G посредством модема на сервер в брокер сообщений, затем брокер сообщений копирует полученные данные в оперативную память и по протоколам сетевого стека TCP/IP и UDP уведомляет обработчик сообщений о поступлении новых данных, при этом обработчик сообщений копирует данные из сетевого стека протоколов TCP/IP и UDP в оперативную память и путем подстановки данных в программную структуру формирует сообщение, которое сохраняет в очередь сообщений, причем потребителями данной очереди сообщений выступают независимые, параллельно работающие сервисы, такие как журнал событий высокоавтоматизированного транспортного средства, обработчик предупреждений, сервис цифровых копий высокоавтоматизированного транспортного средства, блок управления высокоавтоматизированного транспортного средства, при этом журнал событий высокоавтоматизированного транспортного средства без предварительной фильтрации регистрирует в системе управления базами данных, полученное из очереди, сообщение об очередном событии и перенаправляет его в сервис ретрансляции событий по протоколам сетевого стека TCP/IP и UDP, причем сервис ретрансляции событий преобразует полученное сообщение из машинного вида в текстовый, человеко-читаемый и по протоколам сетевого стека TCP/IP и UDP отправляет на компьютер диспетчера, в свою очередь, обработчик предупреждений регистрирует в системе управления базами данных, полученное из очереди, сообщение об очередном событии, фильтрует по признаку наличия происшествия и, в случае возникновения происшествия, преобразует полученное сообщение из машинного вида в текстовый, человеко-читаемый и по протоколам сетевого стека TCP/IP и UDP отправляет на компьютер диспетчера, при этом сервис цифровых копий высокоавтоматизированного транспортного средства фильтрует, полученное из очереди, сообщение, по признаку наличия данных телеметрии, регистрирует отфильтрованные сообщения в системе управления базами данных и по запросу перенаправляет последние сохраненные данные в блок управления высокоавтоматизированного транспортного средства и шлюз программной платформы по протоколам сетевого стека TCP/IP и UDP, причем шлюз программной платформы, в свою очередь, по запросу от программного обеспечения рабочего места диспетчера, перенаправляет данные телеметрии на компьютер диспетчера, в свою очередь, посредством обращения в файловое хранилище, картографический сервис предоставляет допустимые маршруты по местности функционирования высокоавтоматизированного транспортного средства, позволяет сохранять и считывать картографические данные, такие как доступные маршрутные точки и спутниковые снимки местности функционирования высокоавтоматизированного транспортного средства, по протоколам TCP/IP и UDP из файлового хранилища, причем при помощи программного обеспечения диспетчер может выбрать на мониторе компьютера маршрут для требуемого высокоавтоматизированного транспортного средства, далее через шлюз программной платформы по протоколам TCP/IP и UDP команда будет передана в блок управления высокоавтоматизированного транспортного средства, который путем копирования маршрутных данных в структуру в оперативной памяти сформирует сообщение и через очередь сообщений отправит его сначала в обработчик сообщений, а затем в брокер сообщений, далее через брокер сообщений по сетям 3G/LTE/5G команда будет передана в модем, который по протоколам TCP/IP и UDP отправит команду управления в облачный агент, а облачный агент скопирует данные команды в оперативную память, отфильтрует ее по признаку управления и в зависимости от команды скопирует соответствующую команду в файловый дескриптор исполнительного модуля, при этом исполнительный модуль путем управления повышением напряжения электрического тока на двигатель приводит в движение высокоавтоматизированное транспортное средство.
Предпочтительно, к вычислительному модулю высокоавтоматизированного транспортного средства посредством USB или ethernet могут подключаться дополнительно передние, задние и боковые бортовые камеры.
Предпочтительно, может содержаться видео-агент, считывающий видео - потоки из файловых дескрипторов камер, подключенных посредством USB или ethernet, и отправляющий их по сетям 3G/LTE/5G посредством модема, используя сетевой стек протоколов TCP/IP и UDP, на компьютер диспетчера.
Краткое описание чертежей
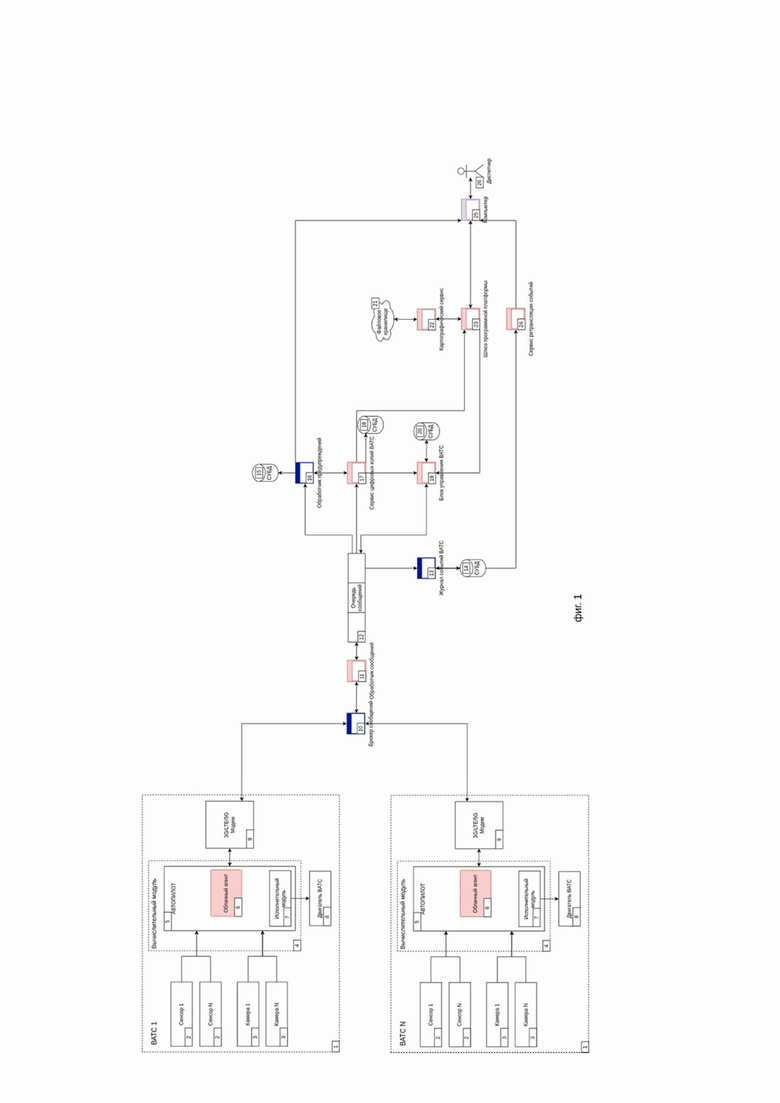
На фиг. 1 представлена схема компонентов, участвующих в процессах передачи, обработки и визуализации данных телеметрии и видео-потоков, использующихся для дистанционного управления ВАТС, где:
1 - высокоавтоматизированное транспортное средство;
2 - сенсор;
3 - камера;
4 - вычислительный модуль;
5 - автопилот;
6 - облачный агент;
7 - исполнительный модуль;
8 - двигатель ВАТС;
9 - 3G/LTE/5G модем;
10 - брокер сообщений;
11 - обработчик сообщений;
12 - очередь сообщений;
13 - журнал событий ВАТС;
14 - СУБД для хранения журнала событий ВАТС;
15 - СУБД для хранения предупреждения;
16 - обработчик предупреждений;
17 - сервис цифровых копий ВАТС;
18 - СУБД для хранения цифровых копий;
19 - блок управления ВАТС;
20 - СУБД для хранения данных блока управления ВАТС;
21 - файловое хранилище карт;
22 - картографический сервис;
23 - шлюз программной платформы;
24 - сервис ретрансляции событий;
25 - компьютер диспетчера;
26 – диспетчер.
Осуществление изобретения
ВАТС состоит из программно-аппаратной платформы. Аппаратная часть состоит из вычислительного модуля, к которому подключены модем, камеры и сенсоры общего назначения такие как сонары, лидары, датчики скорости и местоположения. Программная часть выполняется на вычислительном модуле и называется автопилотом, предоставляя функции передачи данных телеметрии и выполнения движения по дистанционно заданной траектории. Автопилот запускается на вычислительном модуле. Дополнительно к вычислительному модулю ВАТС любым доступным для камеры способом (например, по USB или ethernet) могут подключаться передние, задние, боковые и другие бортовые камеры.
Сервер состоит из программно-аппаратной платформы. Программная часть реализуется в виде набора программных модулей (сервисов), которые могут подключаться к системам управления базами данных (СУБД) и файловым хранилищам. Файловое хранилище обеспечивает дистанционный доступ к файлам по протоколам TCP/IP или UDP. Файловые хранилища, СУБД и сервисы запускаются на компьютере с архитектурой x64.
Рабочее место диспетчера выполняет роль клиентской стороны. Программным обеспечением диспетчера выступает клиентское приложение (десктопное, браузерное или мобильное). Клиентское приложение выполняется на компьютерах с возможными архитектурами x86, x64 или ARM.
ВАТС связывается с сервером через бортовой модем по общедоступным сетям мобильной связи 3G/LTE/5G. По каналам мобильной связи ВАТС отправляет и принимает данные, используя стек протоколов TCP/IP и UDP.
Клиентские приложения связываются с сервером через интернет.
На вычислительном модуле ВАТС данные от сенсоров считываются из файловых дескрипторов устройств автопилотом и, путем копирования через оперативную память, передаются в облачный агент, который, в свою очередь, копирует данные сенсоров из оперативной памяти и отправляет по сетям 3G/LTE/5G посредством модема на сервер в брокер сообщений. Дальше брокер сообщений копирует полученные данные в оперативную память и по протоколам сетевого стека TCP/IP и UDP уведомляет обработчик сообщений о поступлении новых данных. Обработчик сообщений копирует данные из сетевого стека в оперативную память и путем подстановки данных в программную структуру формирует сообщение, которое сохраняет в очередь сообщений. Потребителями данных очереди сообщений выступают независимые, параллельно работающие сервисы:
- Журнал событий ВАТС
- Обработчик предупреждений
- Сервис цифровых копий ВАТС
- Блок управления ВАТС
Сервис журнала событий ВАТС без предварительной фильтрации регистрирует в СУБД, полученное из очереди, сообщение об очередном событии и перенаправляет его в сервис ретрансляции событий по протоколам TCP/IP и UDP. Сервис ретрансляции событий преобразует полученное сообщение из машинного вида в текстовый, человеко-читаемый и по протоколам TCP/IP и UDP отправляет на компьютер диспетчера. Далее программное обеспечение на рабочем месте диспетчера по запросу выводит на монитор сообщение с произошедшим событием.
Обработчик предупреждений регистрирует в СУБД, полученное из очереди, сообщение об очередном событии, фильтрует по признаку наличия происшествия и, в случае возникновения происшествия, преобразует полученное сообщение из машинного вида в текстовый, человеко-читаемый и по протоколам TCP/IP и UDP отправляет на компьютер диспетчера. Далее программное обеспечение на рабочем месте диспетчера принудительно выводит на монитор сообщение с произошедшим событием. Таким образом, диспетчер, находясь на своем дистанционном рабочем месте, может за короткий промежуток времени, который ограничен скоростью передачи данных по сетям 3G/LTE/5G, среагировать на происходящие происшествия в процессе выполнения рейсов более чем одним высокоавтоматизированным транспортным средством.
Сервис цифровых копий ВАТС фильтрует, полученное из очереди, сообщение, по признаку наличия данных телеметрии, регистрирует в СУБД и по запросу перенаправляет последние сохраненные данные в блок управления ВАТС и шлюз программной платформы по протоколам TCP/IP и UDP. Шлюз программной платформы, по запросу от программного обеспечения рабочего места диспетчера, перенаправляет данные телеметрии на компьютер диспетчера. Далее программное обеспечение на рабочем месте, по запросу диспетчера, выводит на монитор данные телеметрии требуемых ВАТС. Дополнительно, в случае выхода данных телеметрии за пределы допустимых норм, сервис цифровых копий ВАТС формирует сообщение с происшествием и по протоколам TCP/IP и UDP отправляет в обработчик предупреждений.
Блок управления ВАТС реализует функции управления. Используя программное обеспечение рабочего места, диспетчер может подавать команды запуска и остановки ходовой части ВАТС и запуска и остановки движения по маршрутным точкам в блок управления ВАТС, который, в свою очередь, использует данные телеметрии сервиса цифровых копий ВАТС для контроля нахождения их в пределах допустимых норм в процессе выполнения команд диспетчера.
Картографический сервис позволяет сохранять и считывать картографические данные (такие как доступные маршрутные точки и спутниковые снимки местности функционирования ВАТС) по протоколам TCP/IP и UDP из файлового хранилища. Дополнительно, посредством обращения в файловое хранилище, он предоставляет допустимые маршруты по местности функционирования ВАТС. При помощи программного обеспечения диспетчер может выбрать на мониторе компьютера маршрут для требуемого ВАТС. Через шлюз программной платформы по протоколам TCP/IP и UDP команда будет передана в блок управления ВАТС, который путем копирования маршрутных данных в структуру в оперативной памяти сформирует сообщение и через очередь сообщений отправит его сначала в обработчик сообщений, а затем в брокер сообщений. Далее, через брокер сообщений по сетям 3G/LTE/5G команда будет передана в модем, который по протоколам TCP/IP и UDP отправит команду управления в облачный агент. Облачный агент скопирует данные команды в оперативную память, отфильтрует ее по признаку управления и в зависимости от команды (начало, пауза, продолжение или отмена движения по маршруту) скопирует соответствующую команду в файловый дескриптор исполнительного модуля.
Исполнительный модуль путем управления повышением напряжения электрического тока на двигатель приводит в движение высокоавтоматизированное транспортное средство.
Заявленное изобретение позволяет корректировать рейс в гибридном режиме - диспетчером диспетчерского пункта и локально средствами самого транспортного средства (без диспетчера), что позволяет оперативно реагировать на изменения во внешней среде. Кроме того, заявленное изобретение решает задачу, при которой затруднено или невозможно выполнение коррекции рейса непосредственно на транспортном средстве (водителем или автоматизированной системой).
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЫРАВНИВАНИЕ СЕТЕВОЙ НАГРУЗКИ С ПОМОЩЬЮ УПРАВЛЕНИЯ СОЕДИНЕНИЕМ | 2004 |
|
RU2387002C2 |
| ВЫРАВНИВАНИЕ СЕТЕВОЙ НАГРУЗКИ С ПОМОЩЬЮ ИНФОРМАЦИИ СТАТУСА ХОСТА | 2004 |
|
RU2380746C2 |
| Система классификации трафика | 2018 |
|
RU2697648C2 |
| СПОСОБ СИНХРОНИЗАЦИИ И ПЕРЕДАЧИ ВЫГРУЖЕННОГО СОЕДИНЕНИЯ СЕТЕВОГО СТЕКА В СЕТЕВОЙ СТЕК | 2003 |
|
RU2336652C2 |
| СИСТЕМА АГРЕГАЦИИ СЕТЕВЫХ ДАННЫХ В КОМПЬЮТЕРНЫХ СЕТЯХ | 2019 |
|
RU2694025C1 |
| Способ и система предотвращения вредоносных автоматизированных атак | 2021 |
|
RU2768567C1 |
| Способ и система предотвращения вредоносных автоматизированных атак | 2020 |
|
RU2740027C1 |
| ОТКАЗОУСТОЙЧИВАЯ СВЯЗЬ В МАРШРУТИЗОВАННЫХ СЕТЯХ | 2006 |
|
RU2420897C2 |
| МУЛЬТИТУННЕЛЬНЫЙ АДАПТЕР ВИРТУАЛЬНОЙ КОМПЬЮТЕРНОЙ СЕТИ | 2015 |
|
RU2675147C1 |
| Способ, устройство, сетевое устройство, носитель информации для передачи данных | 2021 |
|
RU2834599C1 |
Настоящее изобретение относится к дистанционному управлению высокоавтоматизированным транспортным средством. Технический результат заключается в обеспечении возможности одновременного дистанционного управления более чем одним высокоавтоматизированным транспортным средством (ВАТС) и обеспечении короткого времени реакции на происшествия в процессе выполнения рейсов. Технический результат достигается за счет того, что ВАТС состоит из программно-аппаратной платформы. Аппаратная часть состоит из вычислительного модуля, к которому подключены модем, камеры и сенсоры общего назначения, такие как сонары, лидары, датчики скорости и местоположения. Программная часть выполняется на вычислительном модуле и называется автопилотом, предоставляя функции передачи данных телеметрии и выполнения движения по дистанционно заданной траектории. Автопилот запускается на вычислительном модуле. Дополнительно к вычислительному модулю ВАТС любым доступным для камеры способом (например, по USB или ethernet) могут подключаться передние, задние, боковые и другие бортовые камеры. 2 з.п. ф-лы, 1 ил.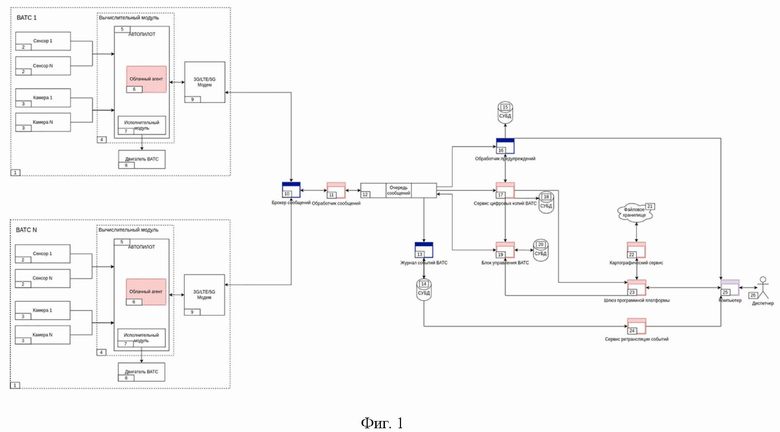
1. Способ дистанционного управления высокоавтоматизированным транспортным средством, содержащий вычислительный модуль высокоавтоматизированного транспортного средства, к которому подключены модем, посредством которого осуществляется передача данных по сетям мобильной связи 3G/LTE/5G, используя сетевой стек протоколов TCP/IP и UDP и сенсоры, такие как сонары, лидары, датчики скорости и местоположения, при этом на вычислительном модуле высокоавтоматизированного транспортного средства данные от сенсоров считываются из файловых дескрипторов устройства автопилота, входящего в состав вычислительного модуля, и, путем копирования через оперативную память, передаются в облачный агент, который, в свою очередь, копирует данные сенсоров из оперативной памяти и отправляет по сетям 3G/LTE/5G посредством модема на сервер в брокер сообщений, затем брокер сообщений копирует полученные данные в оперативную память и по протоколам сетевого стека TCP/IP и UDP уведомляет обработчик сообщений о поступлении новых данных, при этом обработчик сообщений копирует данные из сетевого стека протоколов TCP/IP и UDP в оперативную память и путем подстановки данных в программную структуру формирует сообщение, которое сохраняет в очередь сообщений, причем потребителями данной очереди сообщений выступают независимые, параллельно работающие сервисы, такие как журнал событий высокоавтоматизированного транспортного средства, обработчик предупреждений, сервис цифровых копий высокоавтоматизированного транспортного средства, блок управления высокоавтоматизированного транспортного средства, при этом журнал событий высокоавтоматизированного транспортного средства без предварительной фильтрации регистрирует в системе управления базами данных, полученное из очереди, сообщение об очередном событии и перенаправляет его в сервис ретрансляции событий по протоколам сетевого стека TCP/IP и UDP, причем сервис ретрансляции событий преобразует полученное сообщение из машинного вида в текстовый, человеко-читаемый и по протоколам сетевого стека TCP/IP и UDP отправляет на компьютер диспетчера, в свою очередь, обработчик предупреждений регистрирует в системе управления базами данных, полученное из очереди, сообщение об очередном событии, фильтрует по признаку наличия происшествия и, в случае возникновения происшествия, преобразует полученное сообщение из машинного вида в текстовый, человеко-читаемый и по протоколам сетевого стека TCP/IP и UDP отправляет на компьютер диспетчера, при этом сервис цифровых копий высокоавтоматизированного транспортного средства фильтрует, полученное из очереди, сообщение, по признаку наличия данных телеметрии, регистрирует отфильтрованные сообщения в системе управления базами данных и по запросу перенаправляет последние сохраненные данные в блок управления высокоавтоматизированного транспортного средства и шлюз программной платформы по протоколам сетевого стека TCP/IP и UDP, причем шлюз программной платформы, в свою очередь, по запросу от программного обеспечения рабочего места диспетчера, перенаправляет данные телеметрии на компьютер диспетчера, в свою очередь, посредством обращения в файловое хранилище, картографический сервис предоставляет допустимые маршруты по местности функционирования высокоавтоматизированного транспортного средства, позволяет сохранять и считывать картографические данные, такие как доступные маршрутные точки и спутниковые снимки местности функционирования высокоавтоматизированного транспортного средства, по протоколам TCP/IP и UDP из файлового хранилища, причем при помощи программного обеспечения диспетчер может выбрать на мониторе компьютера маршрут для требуемого высокоавтоматизированного транспортного средства, далее через шлюз программной платформы по протоколам TCP/IP и UDP команда будет передана в блок управления высокоавтоматизированного транспортного средства, который путем копирования маршрутных данных в структуру в оперативной памяти сформирует сообщение и через очередь сообщений отправит его сначала в обработчик сообщений, а затем в брокер сообщений, далее через брокер сообщений по сетям 3G/LTE/5G команда будет передана в модем, который по протоколам TCP/IP и UDP отправит команду управления в облачный агент, а облачный агент скопирует данные команды в оперативную память, отфильтрует ее по признаку управления и в зависимости от команды скопирует соответствующую команду в файловый дескриптор исполнительного модуля, при этом исполнительный модуль путем управления повышением напряжения электрического тока на двигатель приводит в движение высокоавтоматизированное транспортное средство.
2. Способ по п.1, отличающийся тем, что к вычислительному модулю высокоавтоматизированного транспортного средства посредством USB или ethernet могут подключаться дополнительно передние, задние и боковые бортовые камеры.
3. Способ по п.2, отличающийся тем, что может содержать видеоагент, считывающий видеопотоки из файловых дескрипторов камер, подключенных посредством USB или ethernet, и отправляющий их по сетям 3G/LTE/5G посредством модема, используя сетевой стек протоколов TCP/IP и UDP, на компьютер диспетчера.
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| US 10884412 B2, 05.01.2021 | |||
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| СПОСОБ И УСТРОЙСТВО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2019 |
|
RU2795171C1 |

