[Область техники]
[0001]
Настоящее изобретение относится к способу дистанционного управления транспортным средством и устройству дистанционного управления транспортным средством, которые позволяют транспортному средству, имеющему функцию автономного управления движением, автономно перемещаться посредством дистанционного осуществления операции.
[Уровень техники]
[0002]
Известен способ дистанционного управления транспортным средством (Патентный Документ 1). В этом способе делается определение того, соответствует ли жест, который вводится на сенсорной панели устройства дистанционного осуществления операции транспортного средства, предопределенному жесту. Когда введенный жест соответствует предопределенному жесту, транспортному средству позволяется исполнять предопределенную функцию, выделенную для этого жеста.
[Документ предшествующего уровня техники]
[Патентный Документ]
[0003]
[Патентный Документ 1] US2016/0170494A
[Сущность изобретения]
[Проблемы, решаемые изобретением]
[0004]
В вышеприведенном предшествующем уровне техники невозможно определить, действительно ли жест, вводимый на сенсорной панели, вводится оператором.
[0005]
Задача, решаемая настоящим изобретением, состоит в том, чтобы обеспечить способ дистанционного управления транспортным средством и устройство дистанционного управления транспортным средством, которые способны определять, вводится ли жест оператором.
[Средство для решения проблем]
[0006]
В настоящем изобретении, когда операция рассматриваемого транспортного средства, имеющего функцию автономного управления движением, осуществляется дистанционно с помощью устройства дистанционного осуществления операции, получают информацию обнаруженных координат, указывающую временную переходную характеристику в обнаруженных координатах жеста, обнаруженного сенсорной панелью устройства дистанционного осуществления операции, и обнаруживают величину изменения собственно физического изменения, происходящего с устройством дистанционного осуществления операции, для получения информации переходной характеристики устройства осуществления операции, указывающей временную переходную характеристику в величине изменения. Затем частотные характеристики информации обнаруженных координат сравниваются с частотными характеристиками информации переходной характеристики устройства осуществления операции для определения, имеется ли корреляция, и, когда корреляция имеется, транспортное средство управляется для исполнения автономного управления движением.
[Эффект изобретения]
[0007]
Согласно настоящему изобретению, когда имеется корреляция между частотными характеристиками информации обнаруженных координат и частотными характеристиками информации переходной характеристики устройства осуществления операции, может быть сделано определение, что физическое изменение, происходящее с устройством дистанционного осуществления операции, вызвано вводом жеста на сенсорной панели. Таким образом, может быть сделано определение относительно того, введен ли введенный жест оператором.
[Краткое описание чертежей]
[0008]
ФИГ. 1 представляет собой блок-схему, иллюстрирующую систему дистанционной парковки, к которой применяются способ дистанционного управления транспортным средством и устройство дистанционного управления транспортным средством согласно настоящему изобретению.
ФИГ. 2 представляет собой вид сверху, иллюстрирующий пример дистанционной парковки задним ходом, исполняемой в системе дистанционной парковки по ФИГ. 1.
ФИГ. 3 представляет собой пояснительную схему, иллюстрирующую состояние обнаружения относительного положения блока расширения по ФИГ. 1 по отношению к рассматриваемому транспортному средству.
ФИГ. 4 представляет собой блок-схему, иллюстрирующую конфигурацию устройства дистанционного осуществления операции по ФИГ. 1.
ФИГ. 5 представляет собой пояснительную схему, иллюстрирующую состояние, в котором руководство по вводу для жеста отображается на сенсорной панели по ФИГ. 4.
ФИГ. 6A представляет собой график, иллюстрирующий обнаруживаемое значение осуществляемой касанием операции в направлении оси X, обнаруживаемое сенсорной панелью по ФИГ. 4, и информацию обнаруживаемой координаты, получаемую из обнаруживаемого значения.
ФИГ. 6B представляет собой график, иллюстрирующий обнаруживаемое значение осуществляемой касанием операции в направлении оси Y, обнаруживаемое сенсорной панелью по ФИГ. 4, и информацию обнаруживаемой координаты, получаемую из обнаруживаемого значения.
ФИГ. 7A представляет собой график, иллюстрирующий составную величину изменения пространственного положения устройства дистанционного осуществления операции, обнаруживаемую датчиком по ФИГ. 4.
ФИГ. 7B представляет собой график, иллюстрирующий величину изменения пространственного положения, происходящего с устройством дистанционного осуществления операции из-за ввода жеста, которая извлекается из составной величины изменения пространственного положения, проиллюстрированной на ФИГ. 7A.
ФИГ. 8 представляет собой набор диаграмм для сравнения между информацией обнаруженных координат, проиллюстрированной на ФИГ. 6A и 6B, и величиной изменения пространственного положения, происходящего с устройством дистанционного осуществления операции из-за ввода жеста, проиллюстрированной на ФИГ. 7B.
ФИГ. 9 представляет собой блок-схему последовательности операций, иллюстрирующую пример процедуры управления, исполняемой в системе дистанционной парковки по ФИГ. 1.
ФИГ. 10 представляет собой блок-схему последовательности операций, иллюстрирующую процедуру дистанционного осуществления операции по ФИГ. 9.
ФИГ. 11 представляет собой блок-схему последовательности операций, иллюстрирующую процедуру дистанционного осуществления операции по второму варианту осуществления.
ФИГ. 12 представляет собой блок-схему последовательности операций, иллюстрирующую процедуру дистанционного осуществления операции по третьему варианту осуществления.
ФИГ. 13 представляет собой пояснительную схему, иллюстрирующую состояние, в котором информация руководства отображается на сенсорной панели устройства дистанционного осуществления операции.
[Вариант(ы) осуществления настоящего изобретения]
[0009]
«Первый вариант осуществления»
Далее вариант осуществления настоящего изобретения будет описан со ссылкой на чертежи. ФИГ. 1 представляет собой блок-схему, иллюстрирующую систему 1 дистанционной парковки, к которой применяются способ дистанционного управления транспортным средством и устройство дистанционного управления транспортным средством согласно настоящему изобретению. В настоящем описании «автономное управление движением» относится к управлению транспортным средством для движения посредством автоматизированного или автономного управления, исполняемого бортовым устройством управления движением, не полагаясь на операцию водителя по вождению, в то время как «автономное управление парковкой», которое является одним типом автономного управления движением, относится к управлению транспортным средством для парковки (въезда или выезда с парковочного места или гаража) посредством автоматизированного или автономного управления, исполняемого бортовым устройством управления движением, не полагаясь на операцию водителя по вождению. Также в настоящем описании «парковка» относится к постоянной стоянке транспортного средства на парковочном месте, а термин «маршрут движения» охватывает не только маршрут парковки в случае въезда на парковочное место или в гараж, но также и маршрут для выезда из парковочного места или гаража. В этом смысле «способ управления движением транспортного средства и устройство управления движением транспортного средства, используемые при парковке» охватывают как управление движением транспортного средства во время въезда на парковочное место или в гараж, так и управление движением транспортного средства во время выезда из парковочного места или гаража. Въезд на парковочное место или в гараж можно просто называть въездом или заездом, а выезд из парковочного места или гаража можно просто называть выездом или отъездом. В следующих вариантах осуществления конкретные примеры настоящего изобретения будут описаны со ссылкой на пример, в котором способ дистанционного управления и устройство дистанционного управления согласно настоящему изобретению применяются к системе дистанционной парковки, в которой дистанционно управляемое транспортное средство паркуется посредством автономного управления движением. Система 1 дистанционной парковки по настоящему варианту осуществления выполняет автономное управление движением в режиме помощи, в котором оператор, такой как водитель, садится в транспортное средство, и операция вмешательства, выполняемая оператором, является возможной. После этого оператор выходит из транспортного средства и выполняет автономное управление движением извне транспортного средства в режиме дистанционного управления с использованием устройства дистанционного осуществления операции.
[0010]
Система 1 дистанционной парковки согласно настоящему варианту осуществления представляет собой систему для выполнения операции въезда на парковочное место или в гараж, или выезда из него посредством автономного управления движением при выполнении упомянутой операции. В частности, водитель выходит из транспортного средства на полпути въезда на парковочное место или в гараж и продолжает передавать сигнал исполнения команды с устройства дистанционного осуществления операции, убеждаясь при этом в безопасности, и, таким образом, транспортное средство продолжает автономное управление парковкой. Когда транспортное средство может столкнуться с препятствием, автономное управление парковкой останавливается путем приостановки передачи сигнала исполнения команды с устройства дистанционного осуществления операции. В нижеследующем описании режим автономного управления движением, в котором оператор, например водитель, садится в транспортное средство и может выполнять операцию вмешательства, будет называться режимом помощи, а режим автономного управления движением, в котором оператор выходит из транспортного средства и выполняет операцию въезда в или выезда с парковочного места или из гаража с использованием дистанционного осуществления операции, будет называться режимом дистанционного управления.
[0011]
В узком парковочном месте, в котором боковые двери не могут быть полностью открыты, например, в узком гараже или месте для стоянки, в котором, например, другие транспортные средства припаркованы с обеих сторон, водителю может быть трудно войти в или выйти из транспортного средства. Чтобы обеспечить возможность парковки даже в таком случае, режим дистанционного управления может быть использован вместе с дистанционно осуществляемой операцией. При выполнении въезда на парковочное место в режиме дистанционного управления, после инициирования режима дистанционного управления для вычисления маршрута въезда на выбранное парковочное место и запуска автономного управления парковкой, водитель выходит из транспортного средства, перенося при этом устройство дистанционного осуществления операции. Водитель, вышедший из транспортного средства, продолжает передавать сигнал исполнения команды с устройства дистанционного осуществления операции на транспортное средство для завершения въезда на выбранное парковочное место.
[0012]
С другой стороны, при выполнении выезда из парковочного места, водитель включает двигатель внутреннего сгорания или приводной электродвигатель транспортного средства с использованием устройства дистанционного осуществления операции, переносимого водителем, и после того, как режим дистанционного выезда инициирован для вычисления маршрута выезда в выбранное положение выезда и запуска автономного управления выездом, водитель продолжает передавать сигнал исполнения команды с устройства дистанционного осуществления операции для завершения выезда с парковочного места, а затем садится в транспортное средство. Таким образом, система 1 дистанционной парковки по настоящему варианту осуществления представляет собой систему, имеющую такой режим дистанционного управления, использующий дистанционное осуществление операции. Автономное управление парковкой будет показано на примере автономного управления парковкой задним ходом, проиллюстрированном на ФИГ. 2, но настоящее изобретение также может применяться для выезда с парковочного места или гаража, автономной параллельной парковки и другой автономной парковки.
[0013]
Система 1 дистанционной парковки по настоящему варианту осуществления включает в себя устройство 11 установки целевого парковочного места, блок 12 обнаружения положения транспортного средства, блок 13 обнаружения объекта, генератор 14 маршрута парковки, вычислитель 15 замедления до объекта, контроллер 16 следования по маршруту, генератор 17 целевой скорости транспортного средства, контроллер 18 угла поворота, контроллер 19 скорости транспортного средства, базовый блок 20, устройство 21 дистанционного осуществления операции и блок 22 расширения. Устройство 11 установки целевого парковочного места, блок 12 обнаружения положения транспортного средства, блок 13 обнаружения объекта, генератор 14 маршрута парковки, вычислитель 15 замедления до объекта, контроллер 16 следования по маршруту, генератор 17 целевой скорости транспортного средства, контроллер 18 угла поворота, контроллер 19 скорости транспортного средства и базовый блок 20 установлены в транспортном средстве. Устройство 21 дистанционного осуществления операции и блок 22 расширения переносятся оператором, таким как водитель. Каждая конфигурация будет описана ниже.
[0014]
В режиме дистанционного управления устройство 11 установки целевого парковочного места ищет парковочные места, существующие вокруг рассматриваемого транспортного средства, и позволяет оператору выбирать желаемое парковочное место из числа доступных парковочных мест. Кроме того, устройство 11 установки целевого парковочного места выводит информацию о положении выбранного парковочного места (например, координаты относительного положения от текущего положения рассматриваемого транспортного средства и широту/долготу) в генератор 14 маршрута парковки.
[0015]
Для достижения вышеописанных функций устройство 11 установки целевого парковочного места включает в себя переключатель ввода, множество камер, блок обнаружения парковочного места и дисплей типа сенсорной панели (ничто из упомянутого не проиллюстрировано). Переключатель ввода избирательно выбирает режим дистанционного управления или режим помощи. Множество камер захватывает изображения вокруг транспортного средства. Камеры устройства 11 установки целевого парковочного места также могут использоваться в качестве одной или более камер блока 13 обнаружения объекта, который будет описан ниже. Блок обнаружения парковочного места представляет собой компьютер, на котором установлена программа программного обеспечения для поиска доступных парковочных мест по данным изображений, захваченным камерами. Дисплей типа сенсорной панели используется для отображения обнаруженных парковочных мест и выбора парковочного места.
[0016]
Когда оператор, например водитель, выбирает режим дистанционного управления, используя переключатель ввода, устройство 11 установки целевого парковочного места использует множество камер для получения данных изображений вокруг рассматриваемого транспортного средства и анализирует данные изображений для обнаружения доступных парковочных мест. Кроме того, устройство 11 установки целевого парковочного места отображает изображение, включающее в себя доступные парковочные места, на дисплее типа сенсорной панели и побуждает оператора к выбору парковочного места, в котором оператор желает припарковать транспортное средство. Когда оператор выбирает желаемое парковочное место из числа отображаемых парковочных мест, устройство 11 установки целевого парковочного места выводит информацию о положении этого парковочного места в генератор 14 маршрута парковки. При поиске доступных парковочных мест, когда картографическая информация, хранимая в навигационном устройстве, включает в себя информацию о парковке с подробной информацией о положении, может быть использована эта информация о парковке.
[0017]
Блок 12 определения положения транспортного средства состоит из блока GPS, гиродатчика, датчика скорости транспортного средства и других компонентов. Блок GPS обнаруживает радиоволны, передаваемые от множества спутниковых передач, и периодически получает информацию о положении рассматриваемого транспортного средства. Блок 12 обнаружения положения транспортного средства обнаруживает текущее положение рассматриваемого транспортного средства на основе информации о положении рассматриваемого транспортного средства, получаемой посредством блока GPS, информации об изменении угла, получаемой от гиродатчика, и скорости транспортного средства, получаемой от датчика скорости транспортного средства. Информация о положении рассматриваемого транспортного средства, обнаруживаемая блоком 12 обнаружения положения транспортного средства, выводится в генератор 14 маршрута парковки и контроллер 16 следования по маршруту в предопределенные временные интервалы.
[0018]
Блок 13 обнаружения объекта выполнен с возможностью выполнения поиска, присутствует ли объект, например препятствие, в окружении рассматриваемого транспортного средства. Блок 13 обнаружения объекта включает в себя одну или более камер, радар (например, радар миллиметрового диапазона, лазерный радар или ультразвуковой радар), сонар или подобное, или их комбинацию. Камеры, радар, сонар или подобное, или их комбинация крепятся к части внешней панели рассматриваемого транспортного средства. Положение, к которому крепится блок 13 обнаружения объекта, конкретно не ограничено. Один или более блоков 13 обнаружения объекта могут быть прикреплены, например, ко всем или к части участков в центре и по обеим сторонам переднего бампера, в центре и по обеим сторонам заднего бампера, к порогам под правой и левой центральными стойками и к подобному.
[0019]
Каждый блок 13 обнаружения объекта дополнительно включает в себя компьютер, на котором установлена программа программного обеспечения для указания положения объекта, обнаруживаемого камерами, радаром или подобным. Этот компьютер выводит информацию об указанном объекте (информацию о целевом объекте) и информацию о его положении (такую как координаты относительного положения по отношению к текущему положению рассматриваемого транспортного средства и широту/долготу) в генератор 14 маршрута парковки и вычислитель 15 замедления до объекта. Перед запуском автономного управления парковкой информация об указанном объекте и информация о его положении используются генератором 14 маршрута парковки для генерирования маршрута парковки. Когда во время автономного управления парковкой обнаруживается такой объект, как внезапное препятствие, вычислитель 15 замедления до объекта использует информацию об объекте и информацию о его положении для управления замедлением или остановкой рассматриваемого транспортного средства. Во время автономного управления парковкой информация об объекте и информация о его положении используются вычислителем 15 замедления до объекта для управления замедлением или остановкой рассматриваемого транспортного средства при обнаружении объекта, такого как внезапное препятствие.
[0020]
Генератор 14 маршрута парковки вычисляет маршрут парковки от текущего положения рассматриваемого транспортного средства до целевого положения парковки (маршрут парковки относится к маршруту въезда в случае режима дистанционного управления, здесь и далее). Маршрут парковки вычисляется таким образом, чтобы не допустить столкновение или взаимодействие с объектом. Вычисление маршрута парковки включает в себя использование предварительно сохраненного размера рассматриваемого транспортного средства (например, ширины транспортного средства, длины транспортного средства или минимального радиуса поворота), целевого положения парковки (которое относится к информации о положении парковочного места в случае режима дистанционного управления, здесь и далее) от устройства 11 установки целевого парковочного места, информации о текущем положении рассматриваемого транспортного средства от блока 12 обнаружения положения транспортного средства и информации о положении объекта (препятствия) от блока 13 обнаружения объекта.
[0021]
ФИГ. 2 представляет собой вид сверху, иллюстрирующий пример режима дистанционного управления. В текущем положении P1 рассматриваемого транспортного средства V, проиллюстрированном на ФИГ. 2, когда оператор U, например водитель, осуществляет операцию переключателя ввода внутри транспортного средства, чтобы выбрать режим дистанционного управления, устройство 11 установки целевого парковочного места осуществляет поиск доступных парковочных мест, TPS, и отображает изображение, включающее в себя эти парковочные места, TPS, на дисплее. В ответ на это, когда оператор U выбирает парковочное место, TPS, генератор 14 маршрута парковки вычисляет маршрут R1 парковки от текущего положения P1 в положение P3 поворота для парковки и маршрут R2 парковки от положения P3 поворота для парковки в парковочное место, TPS, которое является целью. Затем генератор 14 маршрута парковки выводит эту серию маршрутов R1 и R2 парковки в контроллер 16 следования по маршруту и генератор 17 целевой скорости транспортного средства.
[0022]
Вычислитель 15 замедления до объекта принимает информацию о положении препятствий и других объектов от блока 13 обнаружения объекта и вычисляет время до столкновения рассматриваемого транспортного средства с объектом (TTC: время до столкновения) на основе расстояния от объекта и скорости транспортного средства, тем самым вычисляя момент начала замедления рассматриваемого транспортного средства. Например, в режиме дистанционного управления, проиллюстрированном на ФИГ. 2, объекты-препятствия включают в себя стену W с правой стороны дороги в положении P3 поворота для парковки, дома H1 и H2 как с правой, так и с левой стороны от маршрута R2 парковки до целевого парковочного места, TPS, и садовые деревья WD. Когда расстояние от такого препятствия больше или равно предопределенному значению, вычислитель 15 замедления до объекта устанавливает скорость транспортного средства на изначально устанавливаемое значение и снижает скорость транспортного средства собственно рассматриваемого транспортного средства V в момент, когда время ТТС до столкновения рассматриваемого транспортного средства V с этим препятствием становится меньше или равно предопределенному значению. Аналогичным образом, когда внезапное препятствие обнаруживается на маршруте R1 или R2 парковки во время исполнения последовательного автономного управления парковкой, проиллюстрированного на ФИГ. 2, рассматриваемое транспортное средство V замедляется или останавливается в момент, когда время TTC до столкновения рассматриваемого транспортного средства V с этим препятствием становится меньше или равно предопределенному значению. Этот момент времени замедления выводится в генератор 17 целевой скорости транспортного средства.
[0023]
Контроллер 16 следования по маршруту вычисляет, в предопределенные временные интервалы, целевой угол поворота для следования рассматриваемого транспортного средства по маршрутам парковки на основе маршрутов парковки от генератора 14 маршрута парковки и текущего положения рассматриваемого транспортного средства от блока 12 обнаружения положения транспортного средства. Что касается маршрутов R1 и R2 парковки на ФИГ. 2, контроллер 16 следования по маршруту вычисляет, в предопределенный временной интервал для каждого текущего положения рассматриваемого транспортного средства V, целевой угол поворота по маршруту R1 парковки для движения прямо вперед и поворота вправо от текущего положения P1 в положение P3 поворота для парковки. Аналогично, контроллер 16 следования по маршруту вычисляет, в предопределенный временной интервал для каждого текущего положения рассматриваемого транспортного средства V, целевой угол поворота по маршруту R2 парковки для поворота влево и движения прямо вперед от положения P3 поворота для парковки в парковочное место, TPS. Контроллер 16 следования по маршруту выводит вычисленные целевые углы поворота в контроллер 18 угла поворота.
[0024]
Генератор 17 целевой скорости транспортного средства вычисляет, в предопределенные временные интервалы, целевую скорость транспортного средства для следования рассматриваемого транспортного средства V по маршрутам парковки на основе маршрутов парковки от генератора 14 маршрута парковки и момента начала замедления от вычислителя 15 замедления до объекта. Что касается маршрутов R1 и R2 въезда на ФИГ. 2, генератор 17 целевой скорости транспортного средства вычисляет, в предопределенный временной интервал для каждого текущего положения рассматриваемого транспортного средства V, целевую скорость транспортного средства при трогании из текущего положения P1, движении прямо вперед и повороте вправо, и остановке в положении P3 поворота для парковки, и выводит вычисленную целевую скорость транспортного средства в контроллер 19 скорости транспортного средства. Аналогично, генератор 17 целевой скорости транспортного средства вычисляет, в предопределенный временной интервал для каждого текущего положения рассматриваемого транспортного средства V, целевую скорость транспортного средства при трогании снова (движении задним ходом) из положения P3 поворота для парковки и повороте влево на пути в целевое парковочное место, TPS, и целевую скорость транспортного средства при приближении к целевому парковочному месту, TPS, и остановке в нем, и выдает вычисленные целевые скорости транспортного средства в контролер 19 скорости транспортного средства. Когда внезапное препятствие обнаруживается на маршруте R1 или R2 парковки во время исполнения последовательного автономного управления парковкой, проиллюстрированного на ФИГ. 2, момент замедления или остановки выводится из вычислителя 15 замедления до объекта, и поэтому целевая скорость транспортного средства выводится в контроллер 19 скорости транспортного средства в соответствии с этим моментом.
[0025]
Контроллер 18 угла поворота генерирует управляющий сигнал для осуществления операции исполнительного механизма рулевого управления, обеспеченного в системе рулевого управления рассматриваемого транспортного средства V, на основе целевого угла поворота от контроллера 16 следования по маршруту. Контроллер 19 скорости транспортного средства также генерирует управляющий сигнал для осуществления операции исполнительного механизма акселератора, обеспеченного в системе привода рассматриваемого транспортного средства V, на основе целевой скорости транспортного средства от генератора 17 целевой скорости транспортного средства. Контроллер 18 угла поворота и контроллер 19 скорости транспортного средства управляются одновременно, чтобы исполнять автономное управление парковкой.
[0026]
Далее будут описаны блок 22 расширения и базовый блок 20. Международный стандарт для автономного управления движением транспортного средства определяет условие для разрешения дистанционного осуществления операции транспортного средства, при котором расстояние между транспортным средством и оператором находится в пределах предопределенного расстояния дистанционного осуществления операции (например, в пределах 6 м). Таким образом, в системе 1 дистанционной парковки по настоящему варианту осуществления блок 22 расширения, переносимый оператором U, и базовый блок 20, установленный в рассматриваемом транспортном средстве V, используются для обнаружения относительного положения блока 22 расширения по отношению к рассматриваемому транспортному средству V, то есть относительного положения оператора U, который переносит блок 22 расширения, по отношению к рассматриваемому транспортному средству V. Блок 22 расширения и базовый блок 20 составляют так называемую систему бесключевого доступа. Система бесключевого доступа представляет собой систему, выполненную так, что, когда оператор U, например водитель, приближается к рассматриваемому транспортному средству V в пределах предопределенного расстояния в состоянии переноса блока 22 расширения, между базовым блоком 20, установленным в рассматриваемом транспортном средстве V, и блоком 22 расширения устанавливается беспроводная связь для выполнения автоматического отпирания дверного замка или подобного.
[0027]
В настоящем варианте осуществления, как проиллюстрировано на ФИГ. 3, например, антенны 202a-202d, подключенные к базовому блоку 20, установлены на предопределенных участках рассматриваемого транспортного средства V. Базовый блок 20 передает сигналы поиска блока расширения от антенн 202a-202d. При приближении к рассматриваемому транспортному средству V в пределах предопределенного расстояния блок 22 расширения принимает сигналы поиска блока расширения, передаваемые от антенн 202a-202d, и измеряет интенсивность радиочастотного поля сигнала поиска блока расширения от каждой из антенн 202a-202d. Интенсивность радиочастотного поля сигнала поиска блока расширения изменяется в зависимости от расстояния между блоком 22 расширения и каждой из антенн 202a-202d. То есть, когда блок 22 расширения находится рядом с антенной 202b вблизи левой стороны переднего бампера, интенсивность радиочастотного поля сигнала поиска блока расширения, принимаемого от антенны 202b, является самой высокой, тогда как интенсивность радиочастотного поля сигнала поиска блока расширения, принимаемого от антенны 202с вблизи правой стороны заднего бампера, является самой слабой.
[0028]
Блок 22 расширения передает измеренную интенсивность радиочастотного поля сигнала поиска блока расширения от каждой из антенн 202a-202d в базовый блок 20. Базовый блок 20 имеет блок 201 обнаружения положения, то есть, например компьютер с установленной программой программного обеспечения для вычисления положения блока 22 расширения по интенсивностям радиочастотного поля антенн 202a-202d, с которыми осуществляется прием от блока 22 расширения, например используя способ триангуляции. На основе интенсивностей радиочастотного поля антенн 202a-202d, с которыми осуществляется прием от блока 22 расширения, блок 201 обнаружения положения обнаруживает относительное положение блока 22 расширения по отношению к рассматриваемому транспортному средству V, то есть относительное положение оператора U, который несет блок 22 расширения, по отношению к рассматриваемому транспортному средству V. Блок 201 обнаружения положения выводит обнаруженное относительное положение блока 22 расширения в контроллер 16 следования по маршруту и генератор 17 целевой скорости транспортного средства (в качестве их альтернативы могут быть контроллер 18 угла поворота и контроллер 19 скорости транспортного средства) и передает обнаруженное относительное положение блока 22 расширения в устройство 21 дистанционного осуществления операции.
[0029]
Устройство 21 дистанционного осуществления операции является устройством для выдачи команды оператором U извне транспортного средства относительно того, следует ли продолжить или остановить исполнение автономного управления парковкой, которое установлено устройством 11 установки целевого парковочного места. Таким образом, устройство 21 дистанционного осуществления операции имеет функцию беспроводной связи для передачи сигнала исполнения команды в контроллер 16 следования по маршруту и генератор 17 целевой скорости транспортного средства (в качестве их альтернативы могут быть контроллер 18 угла поворота и контроллер 19 скорости транспортного средства) и выполняет связь с помощью функции беспроводной связи рассматриваемого транспортного средства V.
[0030]
Международный стандарт автономного управления движением транспортного средства определяет, что транспортному средству позволяется исполнять автономное управление движением только тогда, когда оператор осуществляет операцию устройством дистанционного осуществления операции непрерывно. Таким образом, в системе 1 дистанционной парковки по настоящему варианту осуществления сигнал исполнения команды продолжает передаваться от устройства 21 дистанционного осуществления операции к рассматриваемому транспортному средству V только тогда, когда на сенсорной панели устройства 21 дистанционного осуществления операции непрерывно вводится предопределенный жест. Кроме того, рассматриваемое транспортное средство V исполняет автономное управление парковкой только при приеме сигнала исполнения команды, передаваемого от устройства 21 дистанционного осуществления операции. То есть, когда жест перестает обнаруживаться устройством 21 дистанционного осуществления операции и сигнал исполнения команды перестает передаваться, исполнение автономного управления парковкой приостанавливается или останавливается.
[0031]
Устройство 21 дистанционного осуществления операции обеспечивается, например как мобильный информационный терминал, такой как смартфон, на котором установлено прикладное программное обеспечение для дистанционного управления (далее именуемое приложением). Смартфон, на котором установлено это приложение, служит в качестве устройства 21 дистанционного осуществления операции системы 1 дистанционной парковки посредством активации данного приложения.
[0032]
Мобильные информационные терминалы, такие как смартфоны, включают в себя терминалы, оснащенные функцией автоматизации операции в стандартной комплектации, а также терминалы, которые могут получить такую функцию автоматизации операции посредством установки прикладного программного обеспечения. Функция автоматизации операции используется для записи и повторного воспроизведения осуществленной касанием операции на сенсорной панели 211. Как описано выше, мобильный информационный терминал, такой как смартфон, используется в качестве устройства 21 дистанционного осуществления операции, и, следовательно, автономное управление парковкой рассматриваемого транспортного средства V может быть исполнено посредством ввода жеста с использованием функции автоматизации операции, даже если оператор фактически жест не вводит. В частности, когда для увеличения расстояния дистанционного осуществления операции рассматриваемого транспортного средства V оператор U размещает блок 22 расширения вблизи рассматриваемого транспортного средства V или на крыше рассматриваемого транспортного средства V и осуществляет операцию функции автоматизации операции устройства 21 дистанционного осуществления операции для ввода жеста, не перенося при этом блок 22 расширения, рассматриваемое транспортное средство V будет выполнять автономное управление парковкой в положении, удаленном от оператора U, без участия оператора U. В системе 1 дистанционной парковки по настоящему варианту осуществления для подавления ввода жеста с использованием функции автоматизации операции делается определение того, вводится ли жест, вводимый в устройство 21 дистанционного осуществления операции, посредством осуществляемой касанием операции оператора U. Затем, когда жест не вводится осуществляемой касанием операцией оператора U, исполнение автономного управления парковкой рассматриваемого транспортного средства V приостанавливается или запрещается.
[0033]
Как проиллюстрировано на ФИГ. 4, устройство 21 дистанционного осуществления операции включает в себя сенсорную панель 211, датчик 212, генератор 213 информации, блок 214 хранения, блок 215 определения, командный блок 216 и блок 217 связи. Сенсорная панель 211 обнаруживает жест, который вводится посредством осуществляемой касанием операции оператора U. Датчик 212 определяет величину изменения собственно физического изменения, которое происходит с устройством 21 дистанционного осуществления операции. Генератор 213 информации генерирует информацию обнаруженных координат на основе обнаруженных координат жеста, обнаруженного сенсорной панелью 211. Генератор 213 информации также генерирует информацию переходной характеристики устройства осуществления операции, которая указывает временную переходную характеристику в величине изменения (набор или профиль переходных характеристик величины изменения по отношению к направлению оси времени) собственно физического изменения устройства 21 дистанционного осуществления операции. Блок 214 хранения хранит информацию обнаруженных координат, информацию командного жеста, относящуюся к предварительно установленному командному жесту, и информацию переходной характеристики устройства осуществления операции. Блок 215 определения сравнивает информацию обнаруженных координат с информацией командного жеста, чтобы определить, является ли жест, обнаруженный сенсорной панелью 211, командным жестом. Блок 215 определения также сравнивает частотные характеристики информации обнаруженных координат с частотными характеристиками информации переходной характеристики устройства осуществления операции для определения, имеется ли корреляция. Командный блок 216 генерирует сигнал исполнения команды, когда обнаруженный жест является командным жестом, и корреляция между частотными характеристиками информации обнаруженных координат и частотными характеристиками информации переходной характеристики устройства осуществления операции имеется. Блок 217 связи передает сигнал исполнения команды, генерируемый командным блоком 216, на рассматриваемое транспортное средство V.
[0034]
Каждая часть устройства 21 дистанционного осуществления операции будет описана ниже более подробно. В качестве сенсорной панели 211 используется дисплей с сенсорной панелью смартфона, который служит в качестве устройства 21 дистанционного осуществления операции. В режиме дистанционного управления сенсорная панель 211 обнаруживает жест, который вводится осуществляемой касанием операцией оператора U. Жест, подлежащий вводу на сенсорной панели 211, представляет собой заданный командный жест, который установлен предварительно. В настоящем варианте осуществления в качестве заданного командного жеста установлена фигура в форме круга. Фигура в форме круга замкнута таким образом, что начальная часть, где начинается один ввод жеста, и конечная часть, где заканчивается этот один ввод жеста, перекрываются друг с другом. Как проиллюстрировано на ФИГ. 5, на сенсорной панели 211, когда начинается ввод жеста, отображается направляющая 212a ввода, которая указывает форму командного жеста, имеющего заданный размер. Рядом с направляющей 212а ввода отображается сообщение, такое как «Пожалуйста выполните осуществляемую касанием операцию на отображаемой направляющей ввода вдоль направления стрелки». Направляющая 211a ввода может быть скрыта после того, как введенный жест определен в качестве командного жеста.
[0035]
Датчик 212 представляет собой так называемый датчик движения, например датчик ускорения, гиродатчик или датчик ориентации, который предварительно обеспечен в мобильном информационном терминале, который служит в качестве устройства 21 дистанционного осуществления операции. Датчик ускорения, гироскоп и датчик ориентации являются известными датчиками, поэтому их подробное описание будет опущено. В настоящем варианте осуществления величина изменения собственно изменения в пространственном положении устройства 21 дистанционного осуществления операции обнаруживается как величина изменения собственно физического изменения, которое происходит с устройством 21 дистанционного осуществления операции. Например, при вводе жеста в устройство 21 дистанционного осуществления операции оператор U держит устройство 21 дистанционного осуществления операции одной рукой и вводит жест другой рукой или держит устройство 21 дистанционного осуществления операции одной рукой и вводит жест большим пальцем со стороны удержания. Таким образом, когда оператор U держит устройство 21 дистанционного осуществления операции для ввода жеста, изменение в пространственном положении устройства 21 дистанционного осуществления операции происходит из-за ввода жеста. Датчик 212 обнаруживает величину изменения собственно изменения в пространственном положении устройства 21 дистанционного осуществления операции, когда рассматриваемое транспортное средство V дистанционно управляется с использованием устройства 21 дистанционного осуществления операции.
[0036]
Когда центральный процессор (CPU) мобильного информационного терминала, который служит в качестве устройства 21 дистанционного осуществления операции, осуществляет операции в соответствии с приложением, генератор 213 информации функционирует. Каждый из графиков, проиллюстрированных на ФИГ. 6A и 6B, иллюстрирует пример обнаруживаемого значения осуществляемой касанием операции, обнаруживаемой сенсорной панелью 211, когда оператор U вводит жест на сенсорной панели 211. На графике ФИГ. 6A горизонтальная ось представляет время, а вертикальная ось представляет обнаруженное значение xraw осуществляемой касанием операции в направлении оси X. Положительная сторона вертикальной оси на графике на ФИГ. 6A указывает правую сторону центральной линии на оси X сенсорной панели 211, тогда как отрицательная сторона указывает левую сторону центральной линии на оси X. Аналогично, на графике ФИГ. 6B горизонтальная ось представляет время, а вертикальная ось представляет обнаруженное значение yraw осуществляемой касанием операции в направлении оси Y. Положительная сторона вертикальной оси на графике на ФИГ. 6B указывает верхнюю сторону центральной линии на оси Y сенсорной панели 211, тогда как отрицательная сторона указывает нижнюю сторону центральной линии на оси Y. То есть обнаруженные значения xraw и yraw указывают обнаруженные координаты осуществляемой касанием операции, обнаруживаемой сенсорной панелью 211. Генератор 213 информации вычисляет значения скользящего среднего для обнаруженных значений xraw и yraw, которые выводятся из сенсорной панели 211, и сохраняет вычисленные значения скользящего среднего в блоке 214 хранения в качестве информации обнаруженных координат Dx и Dy, которые указывают временные переходные характеристики в обнаруженных координатах (наборы или профили переходных характеристик в обнаруженных координатах относительно направления оси времени).
[0037]
Генератор 213 информации также генерирует информацию переходной характеристики устройства осуществления операции, которая указывает временную переходную характеристику в величине изменения пространственного положения устройства 21 дистанционного осуществления операции, обнаруживаемого датчиком ускорения, гиродатчиком и датчиком ориентации датчика 212. На графике, проиллюстрированном на ФИГ. 7А, горизонтальная ось представляет время, а вертикальная ось представляет величину изменения пространственного положения и направление изменения устройства 21 дистанционного осуществления операции, обнаруживаемые датчиком 212. Когда оператор U вводит жест в состоянии удержания устройства 21 дистанционного осуществления операции, устройство 21 дистанционного осуществления операции подвергается не только изменению пространственного положения из-за этого ввода жеста, но и изменению пространственного положения из-за других различных факторов. Например, оператор U может перемещать устройство 21 дистанционного осуществления операции вверх/вниз и/или вправо/влево при вводе жеста на сенсорной панели 211. Кроме того, когда оператор U вводит жест во время ходьбы, также происходит изменение пространственного положения из-за вибрации при ходьбе. График, проиллюстрированный на ФИГ. 7A, представляет составную величину P изменения пространственного положения, которое происходит с устройством 21 дистанционного осуществления операции из-за таких различных факторов.
[0038]
Генератор 213 информации извлекает из составной величины изменения пространственного положения, обнаруживаемой датчиком 212, величину изменения пространственного положения, вызываемого вводом жеста на сенсорной панели 211 (далее именуемую величиной изменения пространственного положения жестом), и сохраняет извлеченную величину изменения пространственного положения жестом в блоке 214 хранения в качестве информации переходной характеристики устройства осуществления операции. Например, в примере, проиллюстрированном на ФИГ. 7А, генератор 213 информации извлекает из составной величины P изменения пространственного положения участок, имеющий частотные характеристики, близкие к частотным характеристикам описанной выше информации обнаруженных координат Dx и Dy, например, величину изменения пространственного положения, обозначаемую ссылочным обозначением E на ФИГ. 7А, в качестве величины изменения пространственного положения жестом. Затем, как проиллюстрировано на ФИГ. 7B, извлеченная величина изменения пространственного положения жестом сохраняется в блоке 214 хранения в качестве информации S переходной характеристики устройства осуществления операции.
[0039]
Схема извлечения величины изменения пространственного положения жестом из составной величины изменения пространственного положения не ограничивается приведенной выше схемой. Например, другая схема может включать в себя разложение составной величины изменения пространственного положения на множество величин изменения пространственного положения в соответствии с частотными характеристиками, выбор величины изменения пространственного положения, имеющей частотные характеристики, близкие к частотным характеристикам информации обнаруженных координат Dx и Dy, из числа множества полученных разложением величин изменения пространственного положения и принятие выбранной величины изменения пространственного положения в качестве информации переходной характеристики устройства осуществления операции. Еще одна схема может включать в себя предварительное сохранение средней величины изменения пространственного положения устройства 21 дистанционного осуществления операции, вызванного вводом жеста, в блоке 214 хранения в качестве образца и извлечение величины изменения пространственного положения жестом из составной величины изменения пространственного положения на основе упомянутого образца.
[0040]
Блок 214 хранения представляет собой хранилище, такое как память, которое предварительно обеспечено в мобильном информационном терминале, который служит в качестве устройства 21 дистанционного осуществления операции. Блок 214 хранения сохраняет описанную выше информацию обнаруженных координат Dx и Dy и информацию S переходной характеристики устройства осуществления операции. Блок 214 хранения также сохраняет информацию командного жеста, касающуюся формы, размера и т.д. командного жеста, которые предварительно установлены. Кроме того, информация автоматизации операции, указывающая содержание осуществляемой касанием операции, записанной с использованием функции автоматизации операции, сохраняется в хранилище, которое составляет блок 214 хранения. Информация автоматизации операции соответствует информации обнаруживаемых координат, поскольку она является информацией, указывающей временную переходную характеристику координат ввода жеста, обнаруживаемого сенсорной панелью 211 устройства 21 дистанционного осуществления операции во время записи осуществляемой касанием операции с использованием функции автоматизации операции.
[0041]
Когда CPU смартфона, который служит в качестве устройства 21 дистанционного осуществления операции, осуществляет операции в соответствии с приложением, блок 215 определения функционирует. Блок 215 определения получает из блока 214 хранения информацию обнаруженных координат, указывающую временную переходную характеристику в обнаруженных координатах жеста, обнаруживаемого сенсорной панелью 211. То есть, когда жест на сенсорной панели 211 вводи оператор U, блок 215 определения получает информацию обнаруживаемых координат Dx и Dy, генерируемую генератором 213 информации, а когда жест вводится с использованием функции автоматизации операции, блок 215 определения получает информацию автоматизации операции в качестве информации обнаруживаемых координат.
[0042]
Блок 215 определения сравнивает полученную информацию обнаруженных координат Dx и Dy с информацией командного жеста, чтобы определить, является ли жест, обнаруженный сенсорной панелью 211 командным жестом, и находится ли скорость ввода этого жеста в пределах предопределенного диапазона. Причина, по которой скорость ввода жеста используется для определения командного жеста, состоит в том, чтобы отличить жест, который вводится из-за касания какого-либо объекта сенсорной панели 211, от жеста оператора U. Дополнительно или альтернативно, когда блок 215 определения получает информацию автоматизации операции в качестве информации обнаруженных координат, информация автоматизации операции и информация командного жеста сравниваются друг с другом.
[0043]
Чтобы определить, вводится ли жест, вводимый в устройство 21 дистанционного осуществления операции, осуществляемой касанием операцией оператора U, блок 215 определения сравнивает частотные характеристики информации обнаруженных координат Dx и Dy с частотными характеристиками информации S переходной характеристики устройства осуществления операции для определения, имеется ли корреляция. Например, ФИГ. 8 представляет собой набор диаграмм для сравнения между описанной выше информацией обнаруженных координат Dx и Dy и информацией S переходной характеристики устройства осуществления операции. Как видно из этих диаграмм, информация обнаруженной координаты Dx и информация S переходной характеристики устройства осуществления операции совпадают друг с другом в по меньшей мере таких частотных характеристиках, как период и длина волны. Таким образом, блок 215 определения определяет, что информация обнаруженных координат Dx и информация S переходной характеристики устройства осуществления операции имеют корреляцию. Таким образом, когда частотные характеристики информации обнаруженных координат Dx и частотные характеристики информации S переходной характеристики устройства осуществления операции имеют корреляцию, может быть сделано определение, что жест вводится на сенсорной панели 211 в состоянии, в котором устройство 21 дистанционного осуществления операции удерживается оператором U.
[0044]
С другой стороны, когда ввод жеста выполняется устройством 21 дистанционного осуществления операции с использованием функции автоматизации операции, блок 215 определения получает информацию автоматизации операции в качестве информации обнаруженных координат из блока 214 хранения. Когда жест вводится с использованием функции автоматизации операции, изменение пространственного положения, вызываемое вводом жеста, не происходит на устройстве 21 дистанционного осуществления операции, так что информация переходной характеристики устройства осуществления операции, генерируемая генератором 213 информации, не включает в себя величину изменения пространственного положения, вызываемого вводом жеста. Следовательно, даже когда блок 215 определения сравнивает частотные характеристики информации автоматизации операции с частотными характеристиками информации переходной характеристики устройства осуществления операции, никакая корреляция не распознается. Таким образом, делается определение, что жест не является вводом от оператора U, и сигнал исполнения команды не передается на рассматриваемое транспортное средство V; следовательно, ввод жеста с использованием функции автоматизации операции может быть подавлен.
[0045]
Далее будут описаны командный блок 216 и блок 217 связи устройства 21 дистанционного осуществления операции. Когда CPU смартфона, который служит в качестве устройства 21 дистанционного осуществления операции, осуществляет операции в соответствии с приложением, командный блок 216 функционирует. Когда блок 215 определения операции определяет, что жест, обнаруженный на сенсорной панели 211, является командным жестом, и что этот жест вводится оператором U, командный блок 216 генерирует сигнал исполнения команды для управления исполнением рассматриваемым транспортным средством V автономного управления парковкой с использованием функции автономного управления движением. Командный блок 216 вводит сгенерированный сигнал исполнения команды в блок 217 связи.
[0046]
Блок 217 связи использует функцию связи, которая предварительно обеспечена в смартфоне, который служит в качестве устройства 21 дистанционного осуществления операции. Блок 217 связи представляет собой, например, блок беспроводной связи, такой как блок Bluetooth (зарегистрированный товарный знак), и в режиме дистанционного управления подключается к блоку беспроводной связи (не проиллюстрирован), установленному в рассматриваемом транспортном средстве V. Блок 217 связи передает сигнал исполнения команды, генерируемый командным блоком 216 на рассматриваемое транспортное средство V. Также в качестве блока 217 связи может использоваться беспроводная локальная сеть (LAN), такая как Wi-Fi (зарегистрированный товарный знак), линия мобильной связи или подобное.
[0047]
Как показано на ФИГ. 1 сигнал исполнения команды, передаваемый рассматриваемому транспортному средству V, вводится в контроллер 16 следования по маршруту и генератор 17 целевой скорости транспортного средства. Как описано выше, относительное положение между рассматриваемым транспортным средством V и блоком 22 расширения вводится из блока 201 обнаружения положения в контроллер 16 следования по маршруту и генератор 17 целевой скорости транспортного средства. Когда расстояние между рассматриваемым транспортным средством V и блоком 22 расширения находится в пределах расстояния дистанционного осуществления операции и сигнал исполнения команды вводится от устройства 21 дистанционного осуществления операции, контроллер 16 следования по маршруту выводит целевой угол поворота в контроллер 18 угла поворота. Аналогично, когда расстояние между рассматриваемым транспортным средством V и блоком 22 расширения находится в пределах расстояния дистанционного осуществления операции и сигнал исполнения команды вводится от устройства 21 дистанционного осуществления операции, генератор 17 целевой скорости транспортного средства выводит целевую скорость транспортного средства в контроллер 19 скорости транспортного средства. На основе целевого угла поворота от контроллера 16 следования по маршруту контроллер 18 угла поворота генерирует управляющий сигнал для осуществления операции исполнительным механизмом рулевого управления, обеспеченным в системе рулевого управления рассматриваемого транспортного средства. На основе целевой скорости транспортного средства от контроллера 17 целевой скорости транспортного средства контроллер 19 скорости транспортного средства генерирует управляющий сигнал для осуществления операции исполнительным механизмом акселератора, обеспеченным в системе привода рассматриваемого транспортного средства V.
[0048]
В случае, когда расстояние между рассматриваемым транспортным средством V и блоком 22 расширения больше, чем расстояние дистанционного осуществления операции, контроллер 16 следования по маршруту не выводит целевой угол поворота в контроллер 18 угла поворота, даже когда сигнал исполнения команды вводится от устройства 21 дистанционного осуществления операции. Аналогично, в случае, когда расстояние между рассматриваемым транспортным средством V и блоком 22 расширения больше, чем расстояние дистанционного осуществления операции, генератор 17 целевой скорости транспортного средства не выводит целевую скорость транспортного средства в контроллер 19 скорости транспортного средства, даже когда сигнал исполнения команды вводится от устройства 21 дистанционного осуществления операции. То есть, в случае, когда расстояние между рассматриваемым транспортным средством V и блоком 22 расширения больше, чем расстояние дистанционного осуществления операции, автономное управление парковкой не исполняется даже когда командный жест вводится от устройства 21 дистанционного осуществления операции.
[0049]
Далее будет описан поток управления системы 1 дистанционной парковки по настоящему варианту осуществления со ссылкой на ФИГ. 9 и 10. Здесь будет описана сцена, в которой парковка задним ходом, проиллюстрированная на ФИГ. 2, исполняется посредством автономного управления парковкой. ФИГ. 9 представляет собой блок-схему последовательности операций, иллюстрирующую процедуру управления, исполняемую в системе 1 дистанционной парковки по настоящему варианту осуществления. ФИГ. 10 представляет собой блок-схему последовательности операций, иллюстрирующую процедуру в устройстве 21 дистанционного осуществления операции для обнаружения и определения жеста и передачи сигнала исполнения команды.
[0050]
Сначала, когда рассматриваемое транспортное средство V прибывает в положение P1 вблизи целевого парковочного места, TPS, на этапе S1, проиллюстрированном на ФИГ. 9, оператор U, например водитель, включает переключатель запуска дистанционной парковки бортового устройства 11 установки целевого парковочного места для выбора режима дистанционного въезда. На этапе S2 устройство 11 установки целевого парковочного места осуществляет поиск одного или более доступных парковочных мест для рассматриваемого транспортного средства V, используя множество бортовых камер или подобное. На этапе S3 устройство 11 установки целевого парковочного места определяет, имеется ли одно или более доступных парковочных мест. Когда имеется одно или более доступных парковочных мест, процесс переходит на этап S4, а когда никаких доступных парковочных мест нет, процесс возвращается на этап S1. Когда на этапе S2 доступных парковочных мест не обнаружено, оператор может быть проинформирован об этом факте с помощью языкового отображения или голоса, например, «парковочные места отсутствуют», и этот процесс может быть завершен.
[0051]
На этапе S4 устройство 11 установки целевого парковочного места управляет бортовым дисплеем для отображения доступных парковочных мест и побуждает оператора U выбирать желаемое парковочное место. Когда оператор U выбирает конкретное парковочное место, TPS, устройство 11 установки целевого парковочного места выводит информацию о целевом положении парковки в генератор 14 маршрута парковки. На этапе S5 генератор 14 маршрута парковки генерирует маршруты R1 и R2 парковки, проиллюстрированные на ФИГ. 2, из текущего положения P1 рассматриваемого транспортного средства V в парковочное место, TPS, которое представляет целевое положение парковки. Вычислитель 15 замедления до объекта вычисляет момент начала замедления при автономном управлении парковкой на основе информации об объекте, обнаруженном блоком 13 обнаружения объекта. Маршруты R1 и R2 парковки, генерируемые генератором 14 маршрута парковки, выводятся в контроллер 16 следования по маршруту, а момент начала замедления, вычисляемый вычислителем 15 замедления до объекта, выводится в генератор 17 целевой скорости транспортного средства.
[0052]
Благодаря вышеперечисленным процессам автономное управление парковкой переходит в режим ожидания; следовательно, когда оператору U предлагается согласиться с запуском автономного управления парковкой, а затем он соглашается с таким запуском на этапе S6, автономное управление движением запускается в режиме помощи. При парковке задним ходом, проиллюстрированной на ФИГ. 2, как только рассматриваемое транспортное средство V продвинулось вперед при повороте вправо из текущего положения P1 и достигло положения P3 поворота для парковки, рассматриваемое транспортное средство V движется задним ходом при повороте влево до промежуточного положения P4 остановки.
[0053]
На этапе S7, когда положение рассматриваемого транспортного средства V достигает промежуточного положения P4 остановки, рассматриваемое транспортное средство V останавливается, и оператору U предлагается выйти из рассматриваемого транспортного средства V. Когда оператору U предложено выйти из рассматриваемого транспортного средства V на этапе S7, и он/она выходит с устройством 21 дистанционного осуществления операции, за этапом S7 следует этап S8, на котором оператор U активирует устройство 21 дистанционного осуществления операции. Это запускает дистанционное осуществление операции. Примеры запускающего ввода для дистанционного осуществления операции устройством 21 дистанционного осуществления операции включают в себя активацию приложения, установленного в устройстве 21 дистанционного осуществления операции, операцию отпирания дверей, операцию запирания/отпирания дверей, а также их комбинацию и активацию приложения. Рассматриваемое транспортное средство V находится в состоянии остановки во время этапов с S7 по S9.
[0054]
На этапе S9 выполняется процесс сопряжения между устройством 21 дистанционного осуществления операции и рассматриваемым транспортным средством V. Когда процесс сопряжения на этапе S9 обеспечивает возможность рассматриваемому транспортному средству V аутентифицировать устройство 21 дистанционного осуществления операции, чтобы можно было принимать команду, дистанционное осуществление операции запускается на этапе S10.
[0055]
При дистанционном управлении с помощью устройства 21 дистанционного осуществления операции обнаружение относительного положения блока 22 расширения по отношению к рассматриваемому транспортному средству V, то есть относительного положения оператора U, который несет блок 22 расширения, начинается на этапе S101 на ФИГ. 10. Блок 22 расширения принимает сигналы поиска блока расширения, передаваемые от антенн 202a-202d рассматриваемого транспортного средства V, и измеряет интенсивность радиочастотного поля сигнала поиска блока расширения от каждой из антенн 202a-202d. Блок 22 расширения передает измеренную интенсивность радиочастотного поля сигнала поиска блока расширения в базовый блок 20. Блок 201 обнаружения положения базового блока 20 обнаруживает относительное положение блока 22 расширения по отношению к рассматриваемому транспортному средству V на основе интенсивностей радиочастотного поля антенн 202a-202d, с которыми осуществляется прием от блока 22 расширения. Посредством этой операции, когда оператор U несет блок 22 расширения, относительное положение оператора U по отношению к рассматриваемому транспортному средству V может быть обнаружено. Блок 201 обнаружения положения выводит обнаруженное относительное положение в контроллер 16 следования по маршруту и генератор 17 целевой скорости транспортного средства (в качестве их альтернативы могут быть контроллер 18 угла поворота и контроллер 19 скорости транспортного средства) и передает обнаруженное относительное положение в устройство 21 дистанционного осуществления операции.
[0056]
На следующем этапе S102, когда расстояние между рассматриваемым транспортным средством V и блоком 22 расширения находится в пределах предопределенного расстояния дистанционного осуществления операции, процесс переходит на этап S103, на котором устройство 21 дистанционного осуществления операции подтверждает ввод жеста. Когда на этапе S102 расстояние между рассматриваемым транспортным средством V и блоком 22 расширения не находится в пределах предопределенного расстояния дистанционного осуществления операции, на сенсорной панели 211 отображается сообщение, такое как «Пожалуйста, подойдите к транспортному средству в пределы 6 м».
[0057]
Когда ввод жеста выполняется на этапе S103, за этим этапом следует этап S104, на котором блок 215 определения принимает из блока 214 хранения информацию обнаруженных координат, указывающую временную переходную характеристику в обнаруженных координатах жеста, обнаруженного сенсорной панелью 211. То есть, когда оператор U вводит жест на сенсорной панели 211, получают информацию обнаруживаемых координат Dx и Dy, генерируемую генератором 213 информации, тогда как когда жест вводится с использованием функции автоматизации операции, информацию автоматизации операции получают в качестве информации обнаруживаемых координат.
[0058]
На следующем этапе S105 генератор 213 информации извлекает величину изменения пространственного положения, которая генерируется из-за ввода жеста на сенсорной панели 211, из составной величины изменения пространственного положения, обнаруживаемой датчиком 212, и сохраняет извлеченную величину изменения пространственного положения в блоке 214 хранения в качестве информации S переходной характеристики устройства осуществления операции.
[0059]
На этапе S106 блок 215 определения сравнивает информацию обнаруженных координат Dx и Dy, полученную из блока 214 хранения, с информацией командного жеста и определяет, является ли жест, обнаруженный сенсорной панелью 211, командным жестом. Кроме того, когда введенный жест является командным жестом, блок 215 определения определяет на следующем этапе S107, находится ли скорость ввода этого жеста в пределах предопределенного диапазона. Когда введенный жест является командным жестом и скорость ввода находится в пределах предопределенного диапазона, блок 215 определения определяет, что введен командный жест. При обнаружении информации автоматизации операции в качестве информации обнаруженных координат блок 215 определения сравнивает информацию автоматизации операции с информацией командного жеста. Информация автоматизации операции получается путем записи осуществляемой касанием операции соответствующего жеста, которая должна быть определена как командный жест, для автоматизированного ввода жеста, и поэтому блок 215 определения определяет, что жест является командным жестом.
[0060]
Когда обнаруженный жест является командным жестом, процесс переходит на следующий этап S108, на котором блок 215 определения сравнивает частотные характеристики информации обнаруженных координат с частотными характеристиками информации S переходной характеристики устройства осуществления операции для определения, имеется ли корреляция. Когда информация обнаруженных координат, полученная блоком 215 определения, является информацией обнаруженных координат Dx и Dy, сгенерированной оператором U, вводящим жест на сенсорной панели 211, тогда, как проиллюстрировано на ФИГ. 8, например, информация обнаруженных координат Dx и информация S переходной характеристики устройства осуществления операции совпадают друг с другом в по меньшей мере таких частотных характеристиках, как период и длина волны. Таким образом, блок 215 определения определяет, что информация обнаруженных координат Dx и информация S переходной характеристики устройства осуществления операции имеют корреляцию.
[0061]
Когда блок 215 определения определяет, что частотные характеристики информации обнаруженных координат Dx и частотные характеристики информации S переходной характеристики устройства осуществления операции имеют корреляцию, процесс переходит на следующий этап S109, на котором командный блок 216 генерирует исполняемую команду и блок 217 связи передает сигнал исполнения команды на рассматриваемое транспортное средство V. Когда ввод жеста продолжается на следующем этапе S110, процесс возвращается на этап S104, с которого осуществляется повтор определения жеста и передачи сигнала исполнения команды.
[0062]
С другой стороны, когда ввод жеста выполняется в устройстве 21 дистанционного осуществления операции с использованием функции автоматизации операции, блок 215 определения получает информацию автоматизации операции из блока 214 хранения вместо информации обнаруженных координат Dx и Dy. Информация переходной характеристики устройства осуществления операции, сгенерированная генератором 213 информации, не включает в себя частотные характеристики, представляющие величину изменения пространственного положения, вызванного вводом жеста, поскольку изменение пространственного положения, вызванное вводом жеста, не происходит с устройством 21 дистанционного осуществления операции. Соответственно, на этапе S108 блок 215 определения сравнивает информацию автоматизации операции с информацией S переходной характеристики устройства осуществления операции, чтобы определить, что корреляция отсутствует, и, следовательно, сигнал исполнения команды не передается рассматриваемому транспортному средству V.
[0063]
Обратимся снова к ФИГ. 7, на этапе S11, когда расстояние между рассматриваемым транспортным средством V и блоком 22 расширения находится в пределах расстояния дистанционного осуществления операции и сигнал исполнения команды вводится от устройства 21 дистанционного осуществления операции, контроллер 16 следования по маршруту выводит целевой угол поворота в контроллер 18 угла поворота. Аналогично, когда расстояние между рассматриваемым транспортным средством V и блоком 22 расширения находится в пределах расстояния дистанционного осуществления операции и сигнал исполнения команды вводится от устройства 21 дистанционного осуществления операции, генератор 17 целевой скорости транспортного средства выводит целевую скорость транспортного средства в контроллер 19 скорости транспортного средства. На основе целевого угла поворота от контроллера 16 следования по маршруту контроллер 18 угла поворота генерирует управляющий сигнал для осуществления операции исполнительным механизмом рулевого управления, обеспеченным в системе рулевого управления рассматриваемого транспортного средства. На основе целевой скорости транспортного средства от генератора 17 целевой скорости транспортного средства контроллер 19 скорости транспортного средства генерирует управляющий сигнал для осуществления операции исполнительным механизмом акселератора, обеспеченным в системе привода рассматриваемого транспортного средства V. Это позволяет выполнить автономное управление парковкой на следующем этапе S12.
[0064]
Процессы с этапа S10 по этап S13, которые будут описаны ниже, исполняются с предопределенными временными интервалами до тех пор, пока рассматриваемое транспортное средство V не прибудет в целевое парковочное место, TPS, на этапе S13. На этапе S13 делается определение, прибыло ли рассматриваемое транспортное средство V в целевое парковочное место, TPS. Пока рассматриваемое транспортное средство V не прибыло в парковочное место, TPS, процесс возвращается на этап S10, а когда рассматриваемое транспортное средство V прибыло в целевое парковочное место, TPS, рассматриваемое транспортное средство V останавливается, и процесс завершается. Таким образом, автономное управление движением в режиме помощи исполняется по маршруту движения от текущего положения Р1 рассматриваемого транспортного средства V до промежуточного положения Р4 остановки, а автономное управление движением в режиме дистанционного управления исполняется по маршруту движения от промежуточного положения P4 остановки до целевого парковочного места, TPS.
[0065]
Как описано выше, согласно системе 1 дистанционной парковки, к которой применяются способ дистанционного управления и устройство дистанционного управления для транспортного средства по настоящему изобретению, когда операция рассматриваемого транспортного средства V, имеющего функцию автономного управления движением, осуществляется дистанционно с помощью устройства 21 дистанционного осуществления операции, получают информацию обнаруженных координат Dx и Dy, указывающую временную переходную характеристику в обнаруженных координатах жеста, обнаруженного сенсорной панелью 211 контроллера 21, и обнаруживают величину изменения собственно физического изменения, происходящего с устройством 21 дистанционного осуществления операции, для генерирования информации S переходной характеристики устройства осуществления операции, указывающей временную переходную характеристику в величине изменения. Затем частотные характеристики информации обнаруженных координат Dx и Dy сравниваются с частотными характеристиками информации S переходной характеристики устройства осуществления операции для определения, имеется ли корреляция, и, когда корреляция имеется, рассматриваемое транспортное средство V управляется для исполнения автономного управления движением. То есть, когда частотные характеристики информации обнаруженных координат Dx и Dy и частотные характеристики информации S переходной характеристики устройства осуществления операции имеют корреляцию, может быть сделано определение, что жест вводится осуществляемой касанием операцией оператора U. С другой стороны, когда информация автоматизации операции получена в качестве информации обнаруженных координат, обнаруживается, что обнаруженные координаты жеста, обнаруженного сенсорной панелью 211 с использованием информации автоматизации операции, изменяются, но с устройством 21 дистанционного осуществления операции не происходит никакое физическое изменение; следовательно, частотные характеристики информации автоматизации операции и частотные характеристики информации S переходной характеристики устройства осуществления операции не имеют корреляции, и может быть сделано определение, что жест не является вводом посредством осуществляемой касанием операции оператора U. Когда жест не является вводом посредством осуществляемой касанием операции оператора U, сигнал исполнения команды не передается на рассматриваемое транспортное средство V, и, таким образом, ввод жеста с использованием функции автоматизации операции может быть подавлен.
[0066]
Кроме того, изменение пространственного положения, происходящее с устройством 21 дистанционного осуществления операции, используется как физическое изменение, происходящее с устройством 21 дистанционного осуществления операции; следовательно, может быть сделано определение, вводит ли оператор U жест в состоянии удержания устройства 21 дистанционного осуществления операции, и, таким образом, ввод жеста с использованием функции автоматизации операции может быть подавлен.
[0067]
Кроме того, делается определение относительно того, является ли жест командным жестом, который предварительно установлен, и когда жест является командным жестом, частотные характеристики информации обнаруженных координат сравниваются с частотными характеристиками информации переходной характеристики устройства осуществления операции для определения, имеется ли корреляция. Затем, когда корреляция между частотными характеристиками информации обнаруженных координат и частотными характеристиками информации переходной характеристики устройства осуществления операции имеется, рассматриваемое транспортное средство V управляется для исполнения автономного управления движением. Это может побудить оператора U к вводу заданного командного жеста посредством осуществляемой касанием операции, и, таким образом, ввод жеста с использованием функции автоматизации операции может быть подавлен.
[0068]
Кроме того, в качестве устройства 21 дистанционного управления используется мобильный информационный терминал, который служит в качестве устройства 21 дистанционного управления посредством исполнения процесса установленного прикладного программного обеспечения, и физическое изменение, происходящее с устройством 21 дистанционного управления, обнаруживается датчиком, который предварительно обеспечен в мобильном информационном терминале. Это может снизить стоимость, поскольку отсутствует необходимость в новом датчике в устройстве 21 дистанционного осуществления операции.
[0069]
Кроме того, в настоящем изобретении, когда жест перестает обнаруживаться, рассматриваемым транспортным средством V управляют, чтобы остановить автономное управление парковкой. Следовательно, операция управления рассматриваемого транспортного средства V для остановки автономного управления парковкой не требуется, и, таким образом, дистанционное осуществление операции транспортного средства (транспортным средством) V является простым.
[0070]
«Второй вариант осуществления»
Далее будет приведено описание второго варианта осуществления системы дистанционной парковки, к которой применяются способ дистанционного управления транспортным средством и устройство дистанционного управления транспортным средством по настоящему изобретению. Для тех же конфигураций, что и в первом варианте осуществления, будут использоваться те же позиционные обозначения, что и в первом варианте осуществления, и их подробное описание будет опущено.
[0071]
В настоящем варианте осуществления изменение давления, прилагаемого к сенсорной панели 211, используется в качестве физического изменения, происходящего с устройством 21 дистанционного осуществления операции. Когда датчик 212 включает в себя датчик давления, который обнаруживает давление на сенсорной панели 211, изменение давления, прилагаемого к сенсорной панели 211, может быть обнаружено с использованием значения обнаружения этого датчика давления. Когда сенсорная панель 211 является сенсорной панелью, чувствительной к давлению, или когда сенсорная панель 211 снабжена датчиком давления, может использоваться значение обнаружения, обнаруживаемое сенсорной панелью 211.
[0072]
Когда жест вводится осуществляемой касанием операцией на сенсорной панели 211 устройства 21 дистанционного осуществления операции, давление осуществляемой касанием операции не является постоянным, и давление может быть высоким в положении, в котором осуществляемую касанием операцию выполнить легко, и низким в положении, в котором осуществляемую касанием операцию выполнить трудно. С другой стороны, в положении, в котором осуществляемую касанием операцию выполнить трудно, давление может быть неосознанно увеличено для надежного выполнения осуществляемой касанием операции, а в положении, в котором осуществляемую касанием операцию выполнить легко, давление может быть уменьшено. Таким образом, давление осуществляемой касанием операции во время ввода жеста меняется в зависимости от того, как оператор U держит устройство 21 дистанционного осуществления операции, привычки в отношении осуществляемой касанием операции и т. д.
[0073]
В настоящем варианте осуществления, как проиллюстрировано на ФИГ. 11, процесс переходит от этапа S101 на этап S104 согласно той же процедуре, что и в первом варианте осуществления, но на этапе S105a обнаруживается величина изменения давления, прикладываемого к сенсорной панели 211, и генератор 213 информации генерирует информацию переходной характеристики устройства осуществления операции, указывающую временную переходную характеристику этой величины изменения. Затем на этапах S106-S108, как и в первом варианте осуществления, блок 215 определения сравнивает частотные характеристики информации обнаруженных координат с частотными характеристиками информации переходной характеристики устройства осуществления операции для определения, имеется ли корреляция. Затем, когда корреляция между частотными характеристиками информации обнаруженных координат и частотными характеристиками информации переходной характеристики устройства осуществления операции имеется, командный блок 216 генерирует сигнал исполнения команды и блок 217 связи передает этот сигнал исполнения команды на рассматриваемое транспортное средство V на этапе S109. С другой стороны, когда корреляция между частотными характеристиками информации обнаруженных координат и частотными характеристиками информации переходной характеристики устройства осуществления операции отсутствует, сигнал исполнения команды не передается на рассматриваемое транспортное средство V.
[0074]
Таким образом, изменение давления, прикладываемого к сенсорной панели 211, используется как физическое изменение, происходящее с устройством 21 дистанционного осуществления операции; следовательно, может быть сделано определение относительно того, действительно ли для ввода жеста оператор U выполняет осуществляемую касанием операцию на сенсорной панели 211, и, таким образом, ввод жеста с использованием функции автоматизации операции может быть подавлен.
[0075]
«Третий вариант осуществления»
Далее будет приведено описание третьего варианта осуществления системы дистанционной парковки, к которой применяются способ дистанционного управления транспортным средством и устройство дистанционного управления транспортным средством по настоящему изобретению. Для тех же конфигураций, что и в первом варианте осуществления, будут использоваться те же позиционные обозначения, что и в первом варианте осуществления, и их подробное описание будет опущено.
[0076]
В первом варианте осуществления и втором варианте осуществления необходимо вводить жесты множество раз, чтобы сгенерировать информацию переходной характеристики устройства осуществления операции. Другими словами, чтобы точно сгенерировать информацию переходной характеристики устройства осуществления операции, необходимо увеличить число отсчетов величины изменения собственно физического изменения, происходящего с устройством 21 дистанционного осуществления операции, и поэтому запуск автономного управления парковкой рассматриваемого транспортного средства V замедляется. Настоящий вариант осуществления предназначен для решения такой проблемы, так что автономное управление парковкой рассматриваемого транспортного средства V может быть запущено быстро.
[0077]
В настоящем варианте осуществления, как проиллюстрировано на ФИГ. 12, этапы S121-S124 являются теми же процессами, что и этапы S101-S104 в первом варианте осуществления, проиллюстрированном на ФИГ. 10. Кроме того, этапы S125-S127 являются теми же процессами, что и этапы S106, S107 и S109 в первом варианте осуществления. То есть в настоящем варианте осуществления блок 215 определения предварительно определяет, является ли вводимый жест командным жестом, и, когда вводимый жест является командным жестом, командный блок 216 генерирует сигнал исполнения команды, а блок 217 связи передает этот сигнал исполнения команды на рассматриваемое транспортное средство V.
[0078]
На следующем этапе S128 генератор 213 информации может генерировать информацию переходной характеристики устройства осуществления операции по величине изменения пространственного положения устройства 21 дистанционного осуществления операции как на этапе S105 в первом варианте осуществления, проиллюстрированном на ФИГ. 10, или может также генерировать информацию переходной характеристики устройства осуществления операции по изменению давления, прилагаемого к сенсорной панели 211, как на этапе S105a во втором варианте осуществления, проиллюстрированном на ФИГ. 11.
[0079]
На следующем этапе S129 так же, как на этапе S108 в первом варианте осуществления, проиллюстрированном на ФИГ. 10, блок 215 определения сравнивает частотные характеристики информации обнаруженных координат с частотными характеристиками информации переходной характеристики устройства осуществления операции для определения, имеется ли корреляция. Затем, когда корреляция между частотными характеристиками информации обнаруженных координат и частотными характеристиками информации переходной характеристики устройства осуществления операции имеется, генерирование и передача сигнала исполнения команды продолжаются на этапе S130. С другой стороны, когда корреляция между частотными характеристиками информации обнаруженных координат и частотными характеристиками информации переходной характеристики устройства осуществления операции отсутствует, генерирование и передача сигнала исполнения команды останавливаются на этапе S131.
[0080]
Как описано выше, в настоящем варианте осуществления делается определение относительно того, является ли жест командным жестом, который установлен заранее, и, когда жест является командным жестом, рассматриваемое транспортное средство V управляется для исполнения автономного управления движением. Затем, после исполнения автономного управления движением рассматриваемого транспортного средства V, частотные характеристики информации обнаруженных координат сравниваются с частотными характеристиками информации переходной характеристики устройства осуществления операции для определения, имеется ли корреляция, и когда корреляция имеется, рассматриваемое транспортное средство V управляется для продолжения автономного управления движением, в то время как при отсутствии корреляции рассматриваемое транспортное средство V управляется для остановки автономного управления движением. Посредством этой операции можно быстро запустить автономное управление парковкой рассматриваемого транспортного средства V. Более того, когда ввод жеста не выполняется посредством осуществляемой касанием операции оператора U, а выполняется с использованием функции автоматизации операции после начала автономного управления парковкой рассматриваемого транспортного средства V, автономное управление парковкой рассматриваемого транспортного средства V останавливается, и, таким образом, ввод жеста с использованием функции автоматизации операции может быть подавлен.
[0081]
В вышеупомянутых вариантах осуществления с первого по третий, когда оператор U вводит жест с использованием функции автоматизации операции мобильного информационного терминала, автономное управление движением рассматриваемого транспортного средства V не исполняется, но в то же время может быть представлено руководство оператору U, чтобы побудить оператора U к вводу жеста с помощью осуществляемой касанием операции. В примере, проиллюстрированном на ФИГ. 13, например, информация 211b руководства, такая как «Пожалуйста прекратите использовать функцию автоматизации операции и выполните осуществляемую касанием операцию», отображается на сенсорной панели 211 устройства 21 дистанционного осуществления операции. Это может уведомить оператора U о том, что функция автоматизации операций не может быть использована и что необходимо ввести жест с помощью осуществляемой касанием операции. Информация 211b руководства может быть представлена голосом, или голос и отображение на сенсорной панели 211 могут использоваться в комбинации.
[Описание позиционных обозначений]
[0082]
1 Система дистанционной парковки
11 Устройство установки целевого парковочного места
12 Блок обнаружения положения транспортного средства
13 Блок обнаружения объекта
14 Генератор маршрута парковки
15 Вычислитель замедления до объекта
16 Контроллер следования по маршруту
17 Генератор целевой скорости транспортного средства
18 Контроллер угла поворота
19 Контроллер скорости транспортного средства
20 Базовый блок
22 Блок расширения
21 Устройство дистанционного осуществления операции
211 Сенсорная панель
212 Датчик
213 Генератор информации
214 Блок хранения
215 Блок определения
216 Командный блок
217 Блок связи
V Рассматриваемое транспортное средство
TPS Целевое парковочное место
R1, R2 Маршрут парковки
W Стена (препятствие)
H1, H2 Дом (препятствие)
WD Садовое дерево (препятствие)
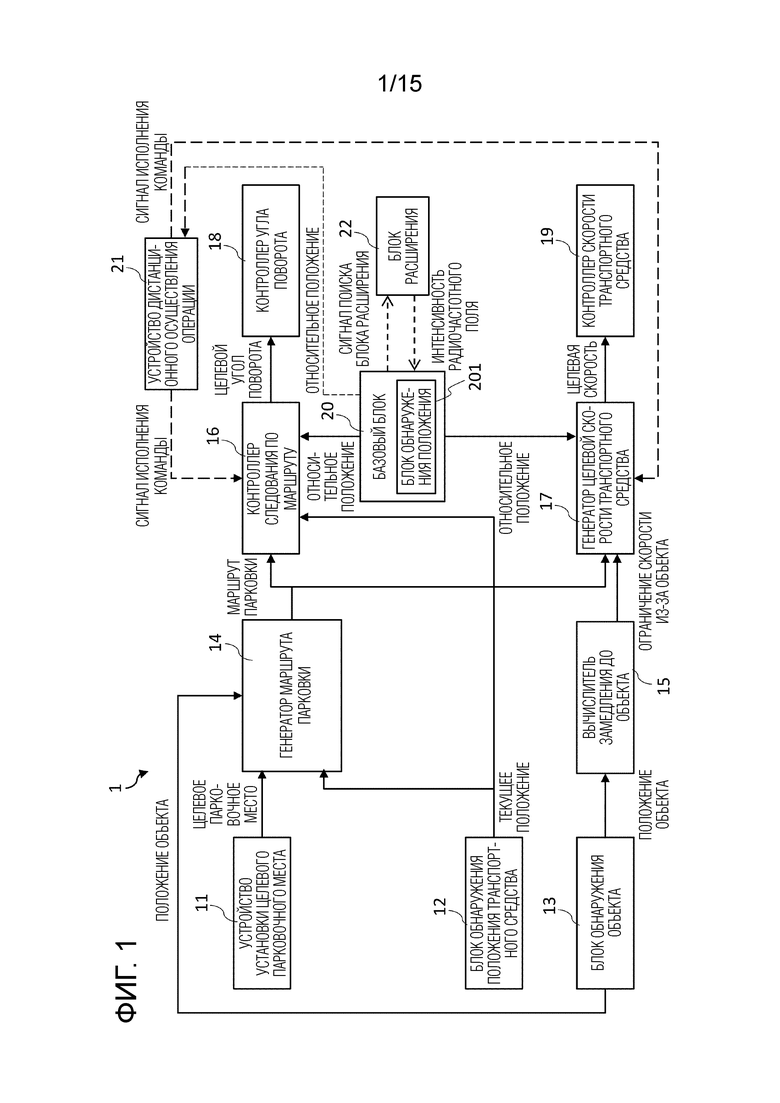
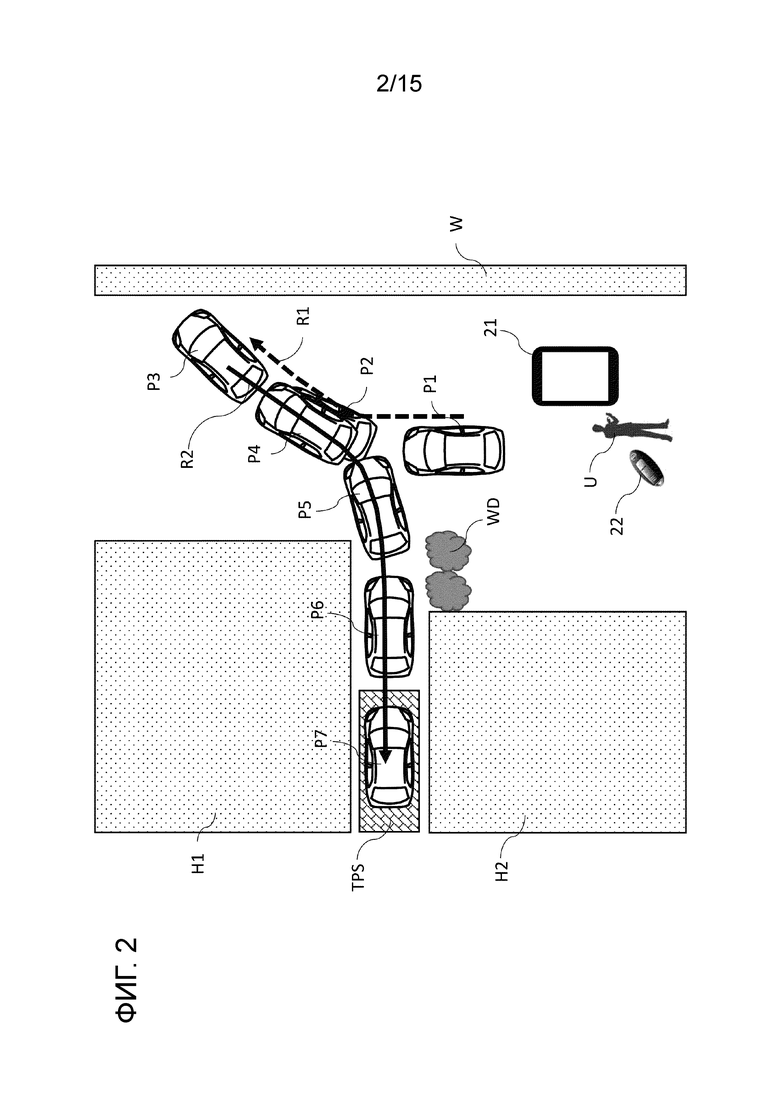
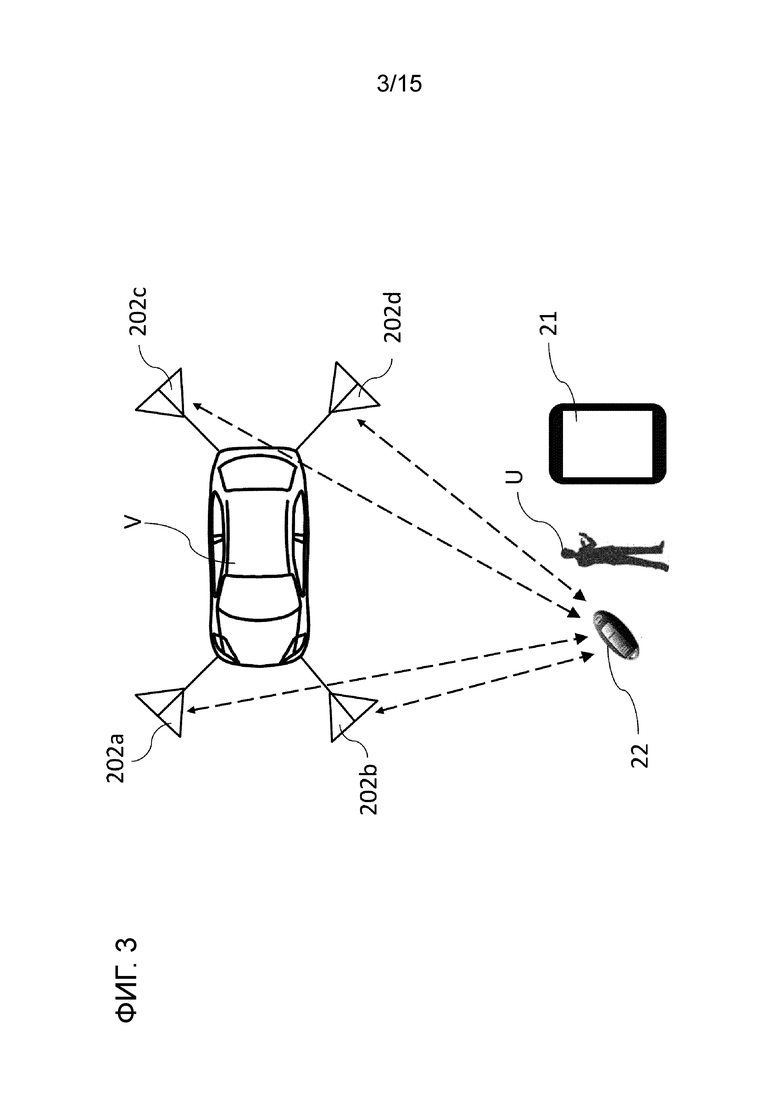
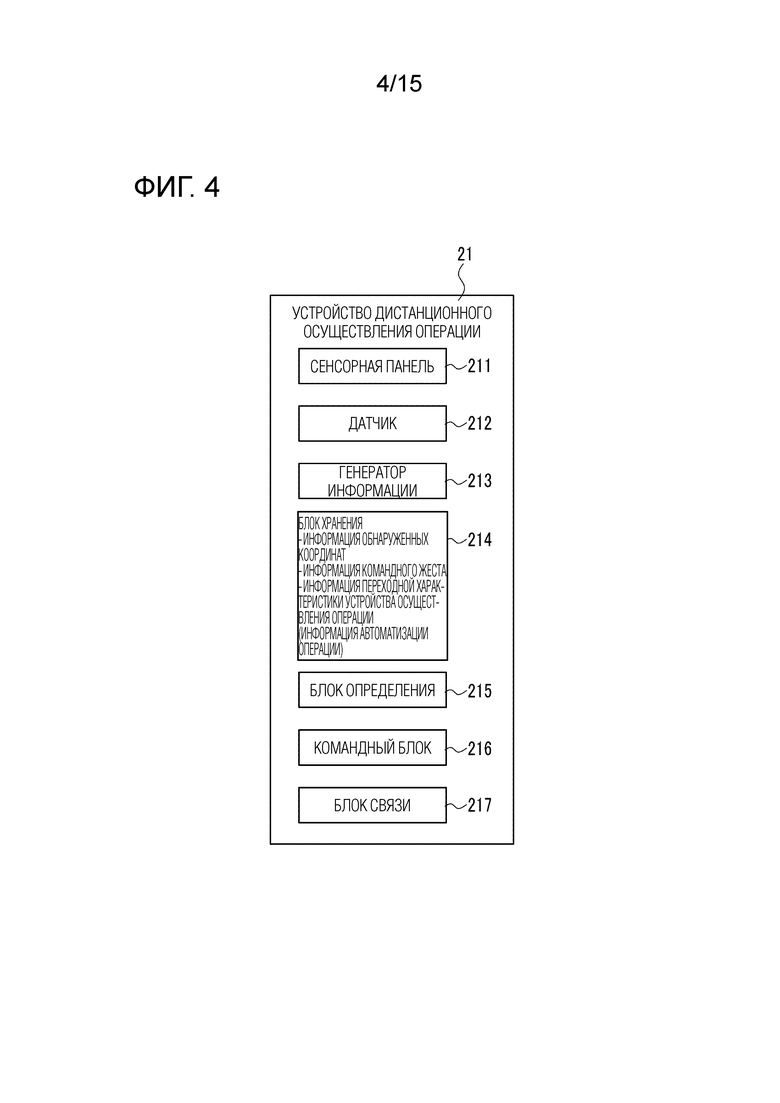
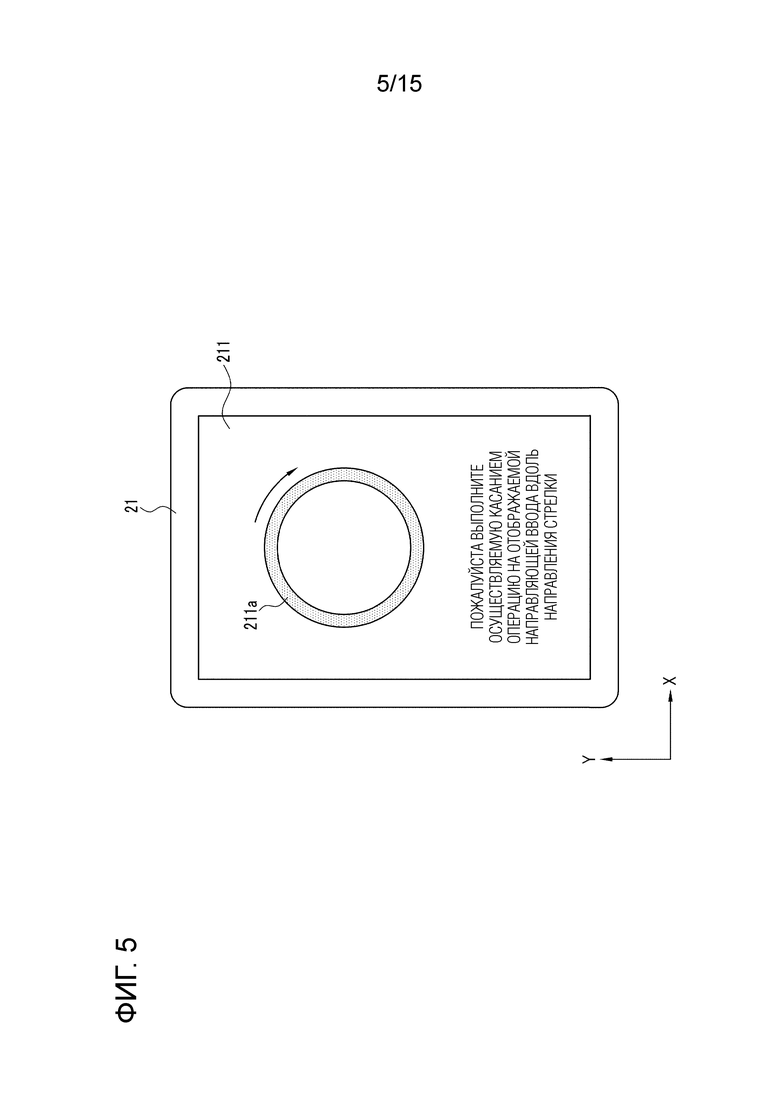
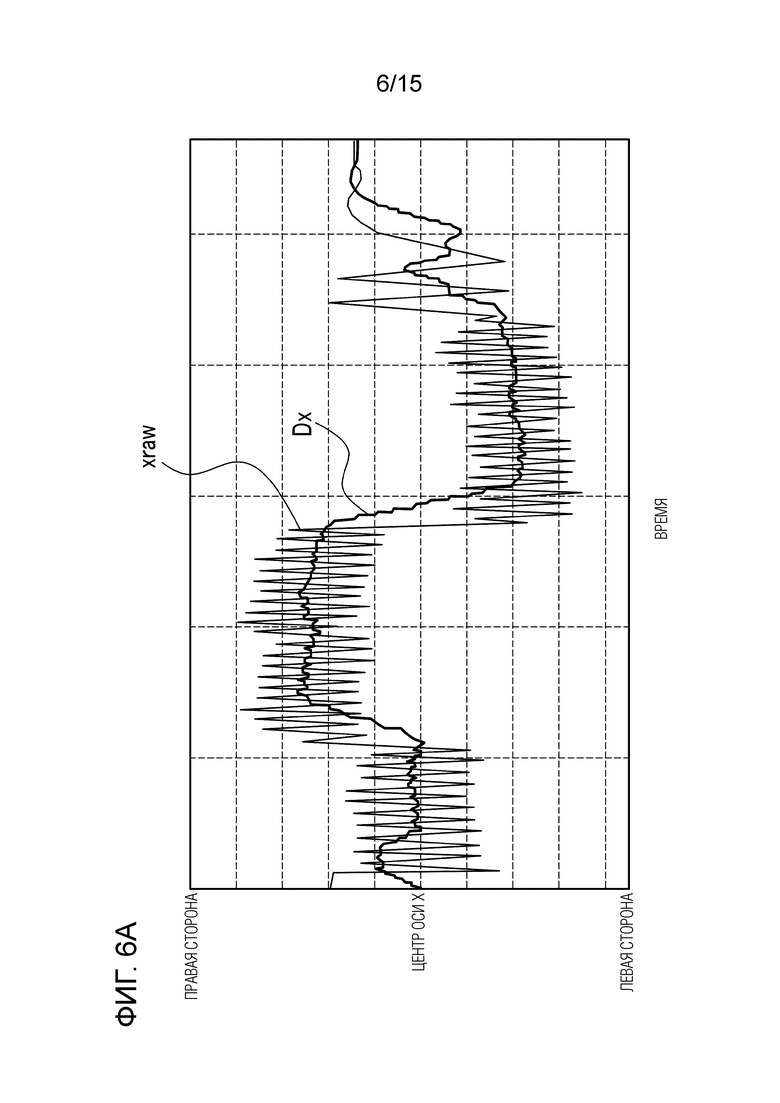

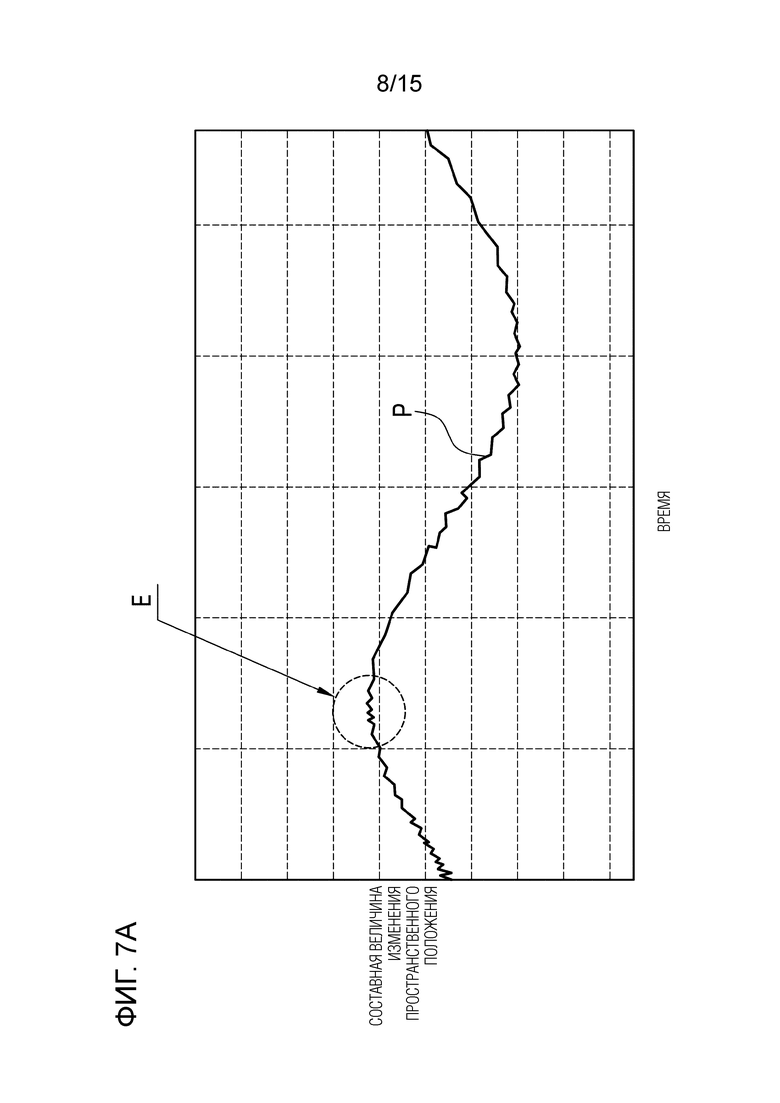
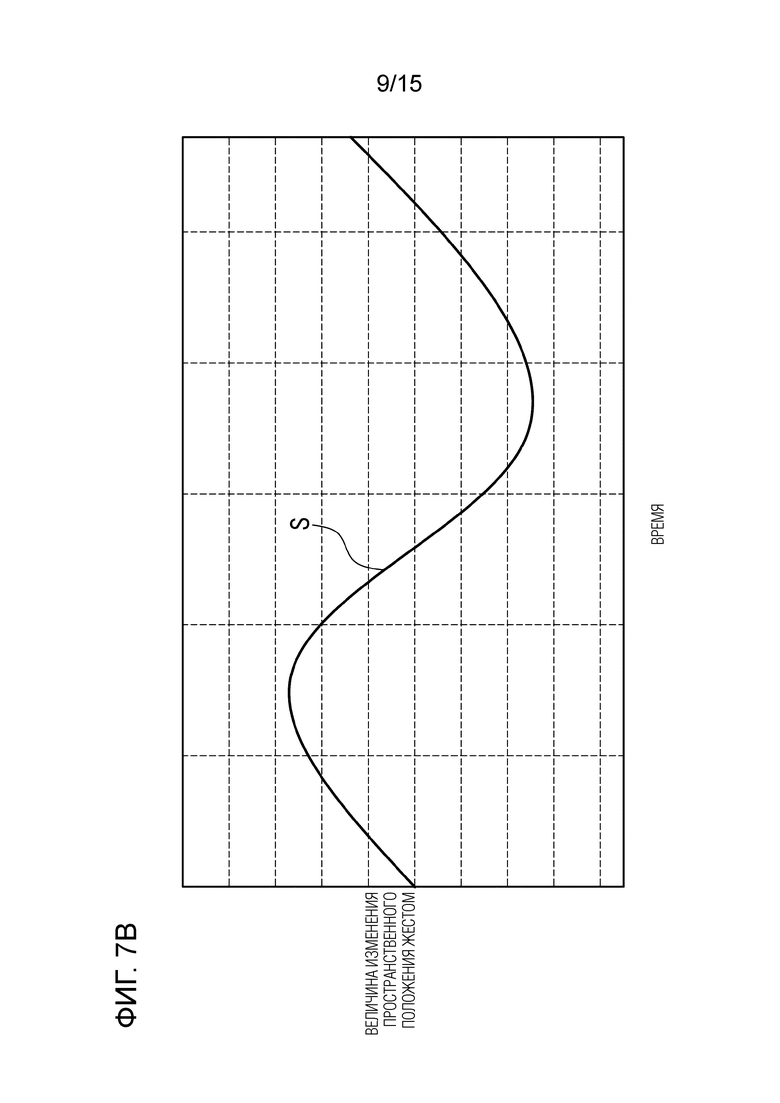
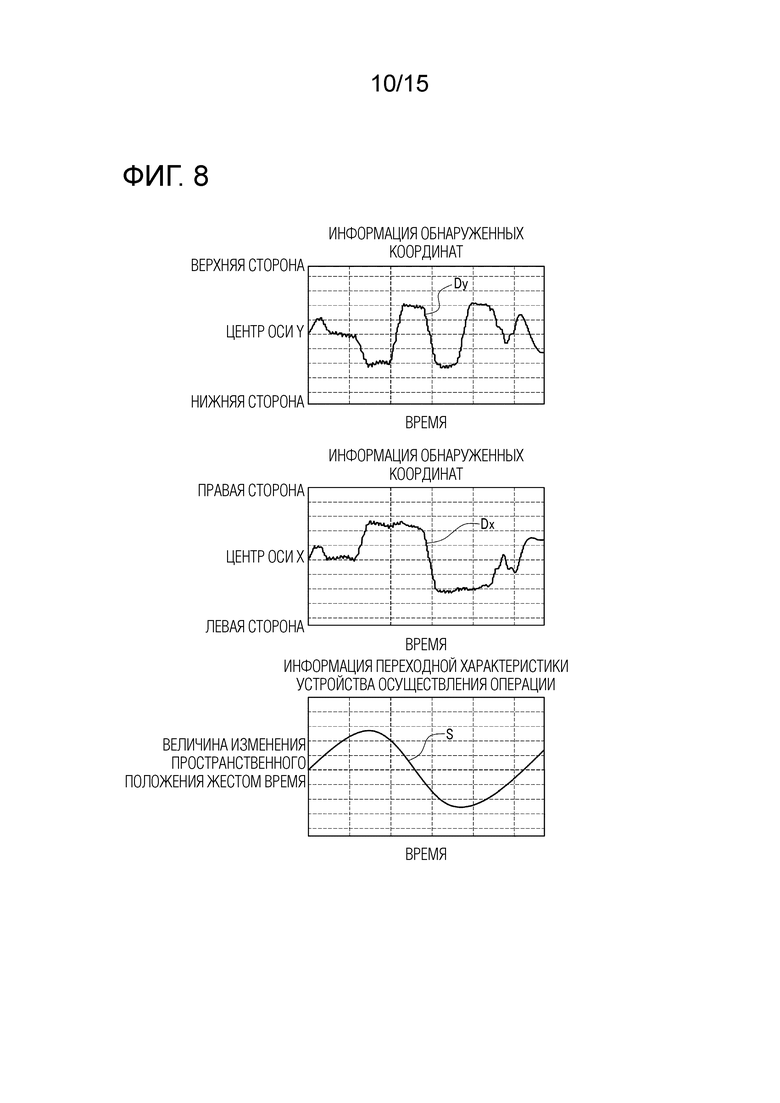
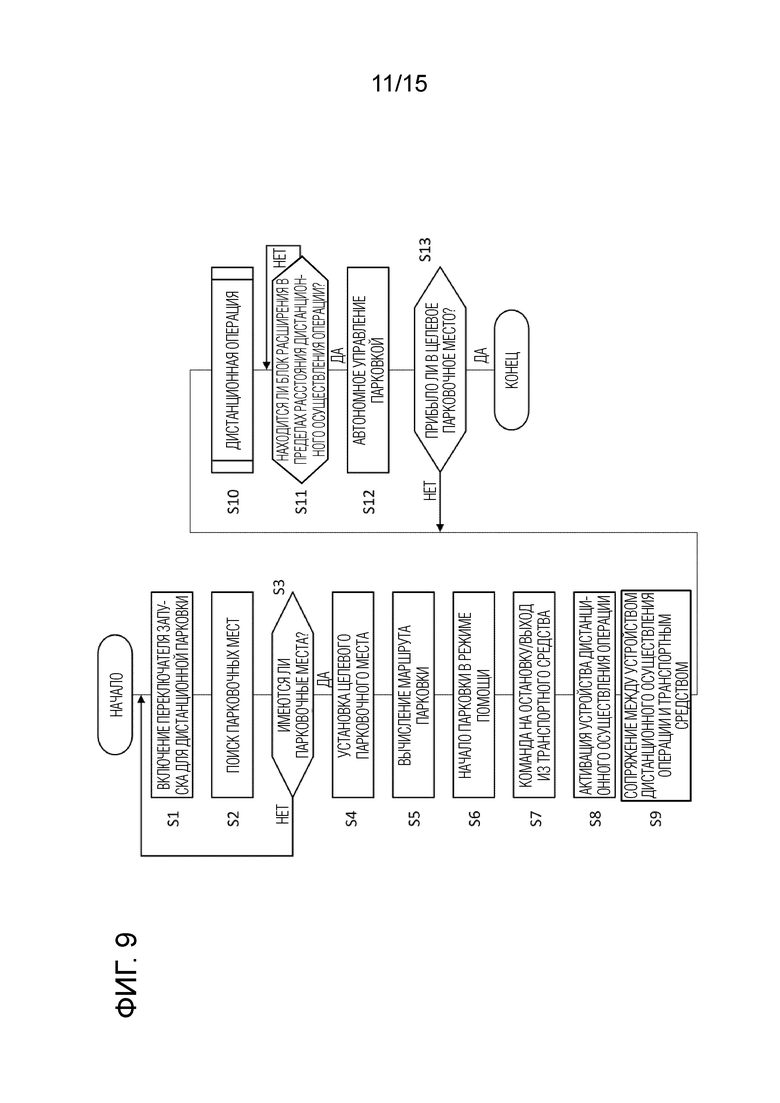
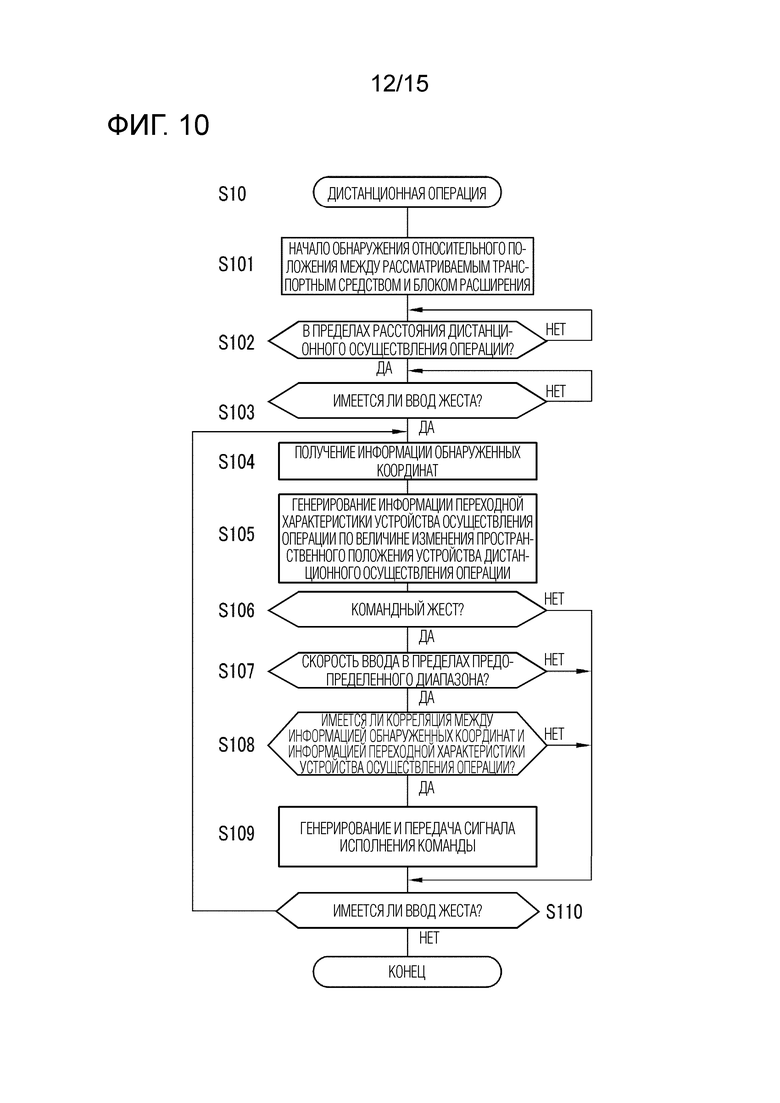
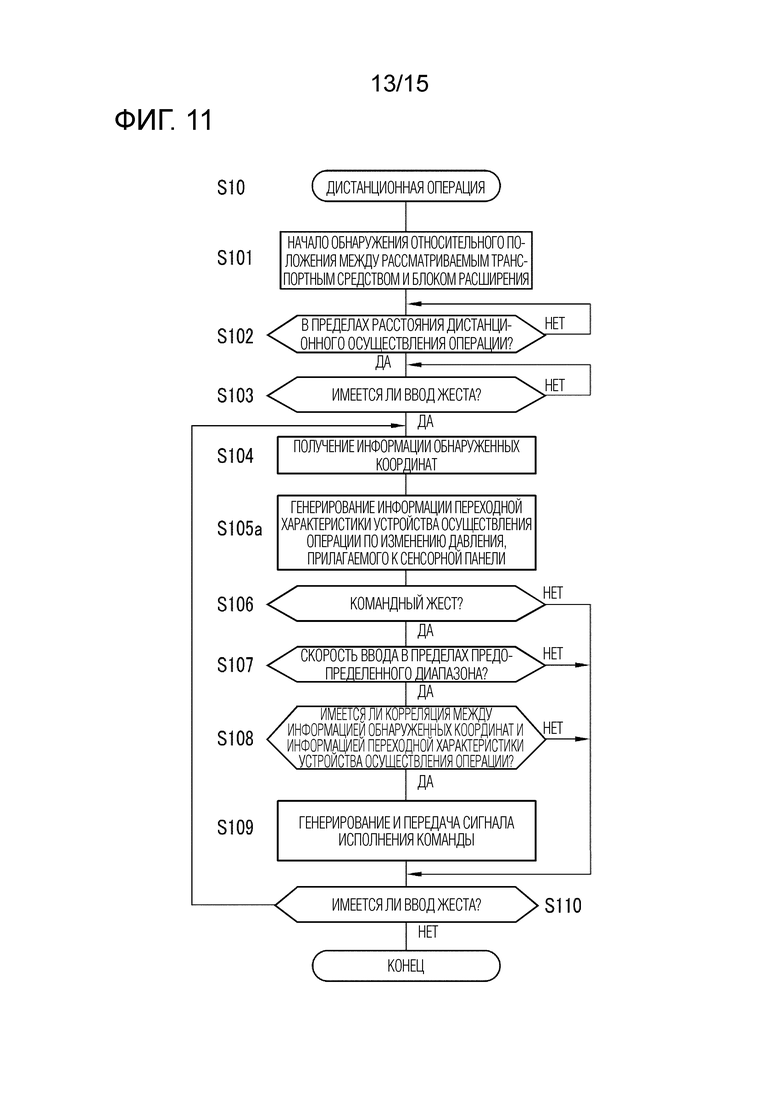
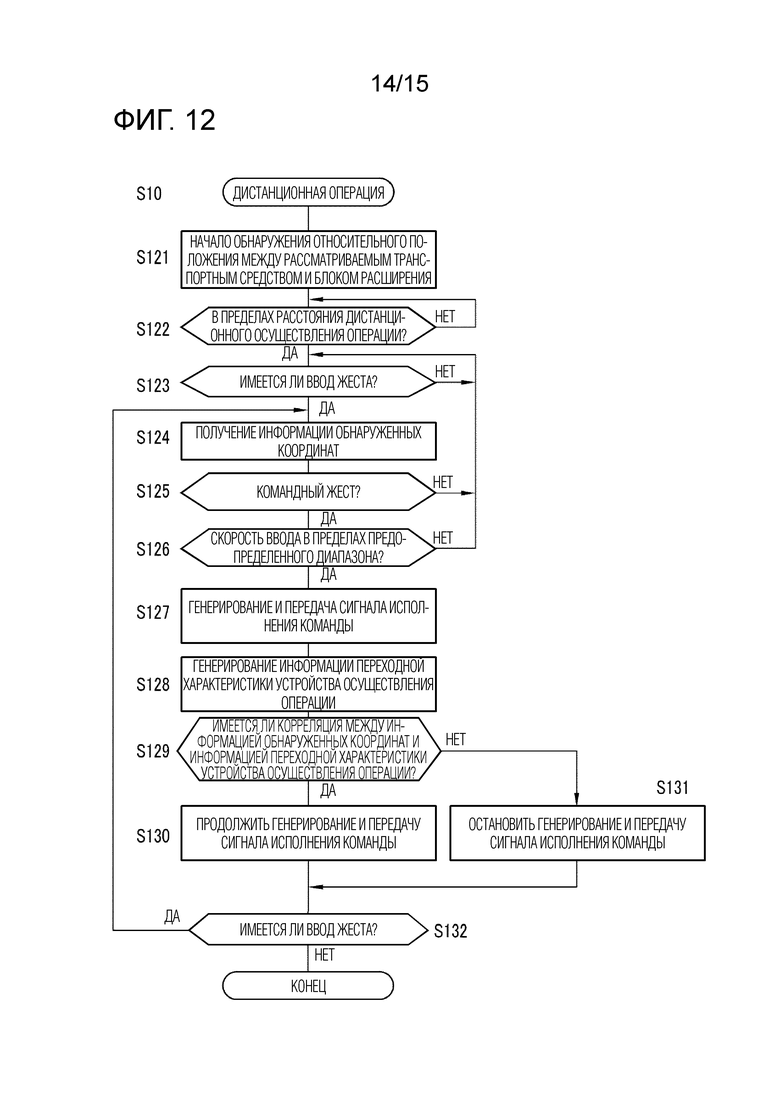
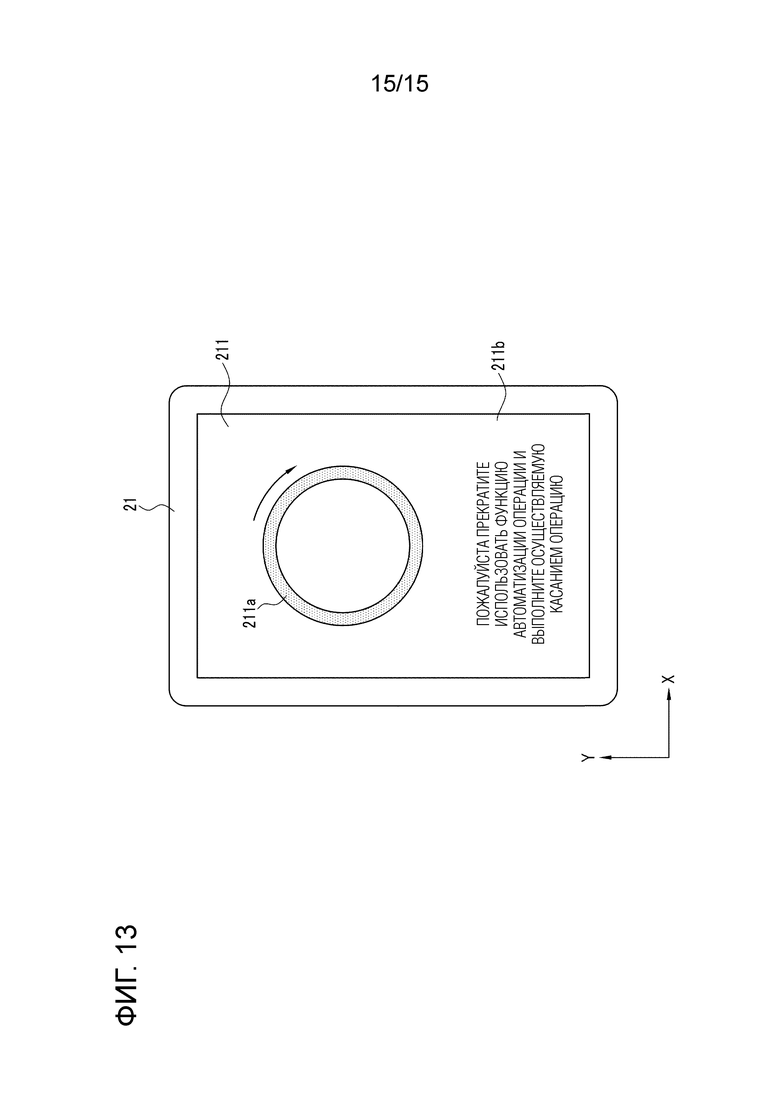
Группа изобретений относится к устройству и способу дистанционного управления транспортным средством. Устройство содержит: блок определения и командный блок. Блок определения выполнен с возможностью: обнаружения величины изменения собственно физического изменения; получения информации переходной характеристики устройства осуществления операции; получения информации обнаруженных координат; сравнения частотных характеристик информации обнаруженных координат с частотными характеристиками информации переходной характеристики устройства осуществления операции. Командный блок выполнен с возможностью управления транспортным средством для исполнения автономного управления движением. При этом должна быть корреляция между частотными характеристиками информации обнаруженных координат и частотными характеристиками информации переходной характеристики устройства осуществления операции. Достигается определение, вводится ли жест управления транспортным средством оператором. 2 н. и 7 з.п. ф-лы, 15 ил.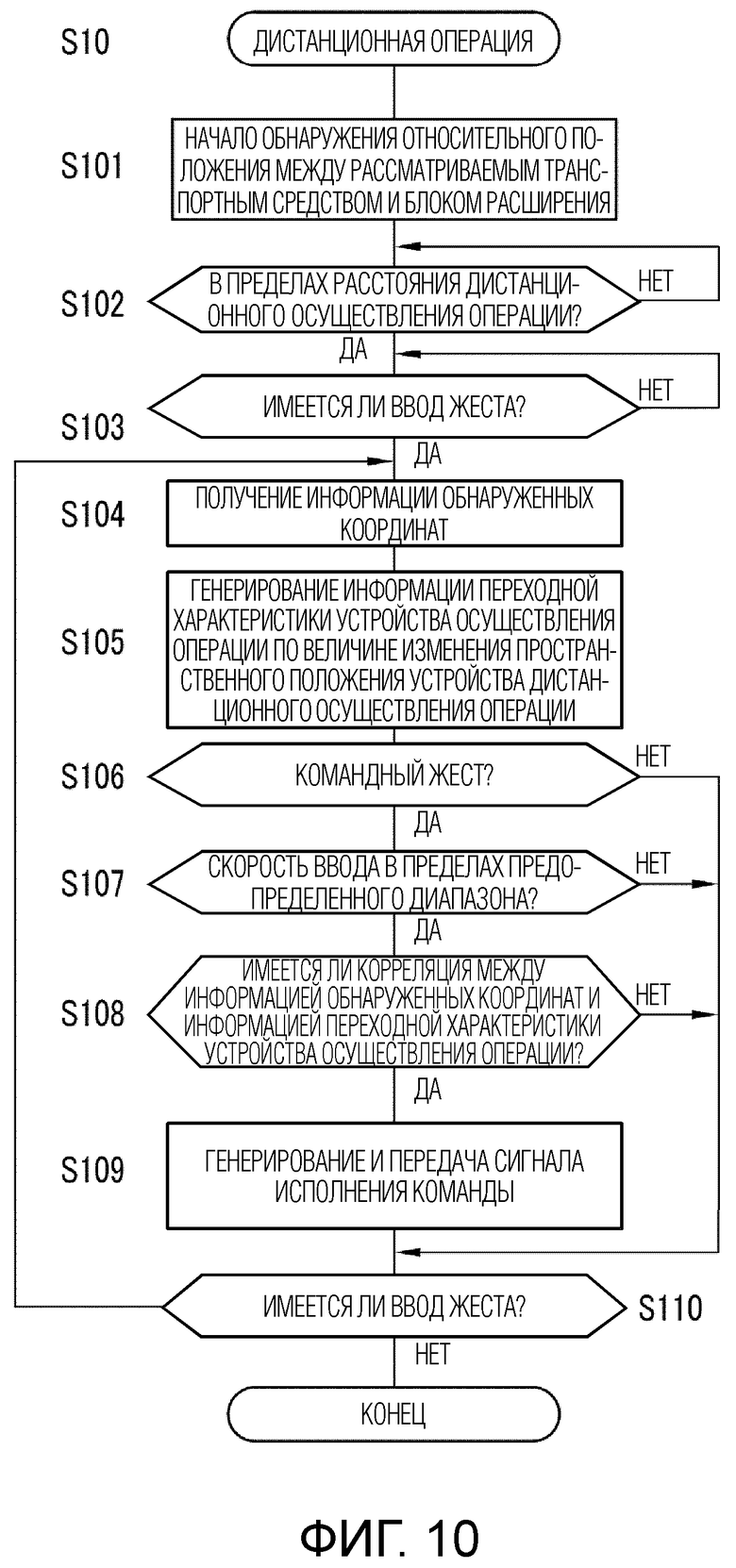
1. Способ дистанционного управления транспортным средством, содержащий:
при дистанционном осуществлении операции транспортного средства, имеющего функцию автономного управления движением, посредством устройства дистанционного осуществления операции,
получение информации обнаруженных координат, указывающей временную переходную характеристику в обнаруженных координатах жеста, обнаруженного сенсорной панелью устройства дистанционного осуществления операции;
обнаружение величины изменения собственно физического изменения, происходящего с устройством дистанционного осуществления операции, для получения информации переходной характеристики устройства осуществления операции, указывающей временную переходную характеристику в величине изменения;
сравнение частотных характеристик информации обнаруженных координат с частотными характеристиками информации переходной характеристики устройства осуществления операции для определения, имеется ли корреляция; и
когда корреляция между частотными характеристиками информации обнаруженных координат и частотными характеристиками информации переходной характеристики устройства осуществления операции имеется, управление транспортным средством для исполнения автономного управления движением.
2. Способ дистанционного управления транспортным средством по п. 1, в котором физическое изменение, происходящее с устройством дистанционного осуществления операции, представляет собой изменение в пространственном положении устройства дистанционного осуществления операции.
3. Способ дистанционного управления транспортным средством по п. 1, в котором физическое изменение, происходящее с устройством дистанционного осуществления операции, представляет собой изменение в давлении, прикладываемом к сенсорной панели.
4. Способ дистанционного управления транспортным средством по любому из пп. 1-3, содержащий:
определяют, является ли упомянутый жест командным жестом, который установлен заранее;
когда упомянутый жест является командным жестом, сравнение частотных характеристик информации обнаруженных координат с частотными характеристиками информации переходной характеристики устройства осуществления операции для определения, имеется ли корреляция; и
когда корреляция между частотными характеристиками информации обнаруженных координат и частотными характеристиками информации переходной характеристики устройства осуществления операции имеется, управление транспортным средством для исполнения автономного управления движением.
5. Способ дистанционного управления транспортным средством по любому из пп. 1-3, содержащий:
определяют, является ли упомянутый жест командным жестом, который установлен заранее;
когда упомянутый жест является командным жестом, управление транспортным средством для исполнения автономного управления движением;
после начала исполнения автономного управления движением транспортного средства, сравнение частотных характеристик информации обнаруженных координат с частотными характеристиками информации переходной характеристики устройства осуществления операции для определения, имеется ли корреляция;
когда корреляция между частотными характеристиками информации обнаруженных координат и частотными характеристиками информации переходной характеристики устройства осуществления операции имеется, управление транспортным средством для продолжения автономного управления движением; и
когда корреляция между частотными характеристиками информации обнаруженных координат и частотными характеристиками информации переходной характеристики устройства осуществления операции отсутствует, управление транспортным средством для остановки автономного управления движением.
6. Способ дистанционного управления транспортным средством по любому из пп. 1-5, в котором
устройство дистанционного осуществления операции представляет собой мобильный информационный терминал, который служит в качестве устройства дистанционного осуществления операции посредством исполнения процесса установленного прикладного программного обеспечения, и
физическое изменение, происходящее с устройством дистанционного осуществления операции, обнаруживается датчиком, который заранее обеспечен в мобильном информационном терминале.
7. Способ дистанционного управления транспортным средством по любому из пп. 1-6, содержащий:
когда упомянутый жест перестает обнаруживаться, остановку автономного управления движением транспортного средства.
8. Способ дистанционного управления транспортным средством по любому из пп. 1-7, содержащий
обнаружение информации обнаруженных координат, указывающей временную переходную характеристику в обнаруженных координатах жеста, обнаруженного сенсорной панелью устройства дистанционного осуществления операции, при этом
когда величина изменения собственно физического изменения, происходящего с устройством дистанционного осуществления операции, не может быть обнаружена, устройство дистанционного осуществления операции представляет информацию руководства оператору, чтобы побудить оператора к вводу жеста посредством осуществляемой касанием операции оператора.
9. Устройство дистанционного управления транспортным средством для дистанционного осуществления операции транспортного средства, имеющего функцию автономного управления движением, посредством устройства дистанционного осуществления операции, при этом устройство дистанционного управления транспортным средством содержит:
блок определения, выполненный с возможностью:
обнаружения величины изменения собственно физического изменения, происходящего с устройством дистанционного осуществления операции;
получения информации переходной характеристики устройства осуществления операции, указывающей временную переходную характеристику в величине изменения;
получения информации обнаруженных координат, указывающей временную переходную характеристику в обнаруженных координатах жеста, обнаруженного сенсорной панелью устройства дистанционного осуществления операции; и
сравнения частотных характеристик информации обнаруженных координат с частотными характеристиками информации переходной характеристики устройства осуществления операции для определения, имеется ли корреляция; и
командный блок, выполненный с возможностью, когда корреляция между частотными характеристиками информации обнаруженных координат и частотными характеристиками информации переходной характеристики устройства осуществления операции имеется, управления транспортным средством для исполнения автономного управления движением.
| JP 2018127066 A, 16.08.2018 | |||
| EP 3163404 A1, 03.05.2017 | |||
| US 2012154294 A1, 21.06.2012 | |||
| US 2015002417 A1, 01.01.2015 | |||
| US 2010201615 A1, 12.08.2010. |

