Изобретение относится к области контрольно-измерительного оптико-механического оборудования и может быть использовано для контроля качества поверхности деталей и линейных размеров с высокой точностью.
Известен лазерный датчик для измерения размеров объекта, содержащий корпус, установленный в нем с возможностью возвратно-поступательного перемещения в вертикальной плоскости шток с буртиком и измерительным наконечником на противоположном торце, блок измерения перемещения штока в виде лазера и оптически связанных интерферометра и отражателя, и счетчика интерференционных полос, блока получения измерительного усилия в виде аэростатической направляющей с жиклерами, разделительными полостями и источниками давления, отличающийся тем, что с целью повышения точности измерений и надежности робот и датчика, он снабжен механизмом перемещения штока, выполненными виде двигателя, муфты, ходового винта, выходной вал двигателя соединен с ходовым винтом через муфту, ходовой гайки с ограничителем проворота, установленной на ходовом винте, демпфера, датчиком, верхнего и нижнего конечных положений штока, установленных на корпусе и взаимодействующих с верхним и нижним торцами ходовой гайки, а отражатель закреплен на измерительном наконечнике штока, (А.с.на изобретение SU 1770737, МПК G01B 11/00 опубл. 23.10.92 г.).
Недостатком данной конструкции является низкая точность измерения линейных размеров, из-за большого расстояния между измерительным наконечником и отражателем, что приводит к необходимости учитывать линейное расширение штока и наконечника при изменении температуры, а также зазора в соединении ходового винта и гайки.
В качестве прототипа выбран лазерный датчик для обнаружения нескольких параметров (Патент RU 2717751, G01N 15/14, G01F 3/42). Модуль содержит лазер, детектор, электропривод и оптическое устройство. Модуль лазерного датчика выполнен с возможностью управлять расстоянием между модулем лазерного датчика и областью фокусировки и обеспечивать два режима модуля лазерного датчика. Причем в первом и втором режимах область фокусировки находится на разном расстоянии. Детектор выполнен с возможностью обнаруживать сигнал интерференции самосмещения оптической волны в лазерном резонаторе. Сигнал интерференции самосмещения в первом режиме используется для обнаружения движения объекта, для управления посредством жестов, для устройства с человеко-машинным интерфейсом. Сигнал интерференции самосмещения во втором режиме используется для определения плотности или размера частиц.
Недостатком устройства является сложность конструкции и большие габариты.
Технический результат изобретения заключается в получении 3D-изображения проверяемой детали, а также контроля износа, упрощении конструкции и уменьшения габаритов датчика.
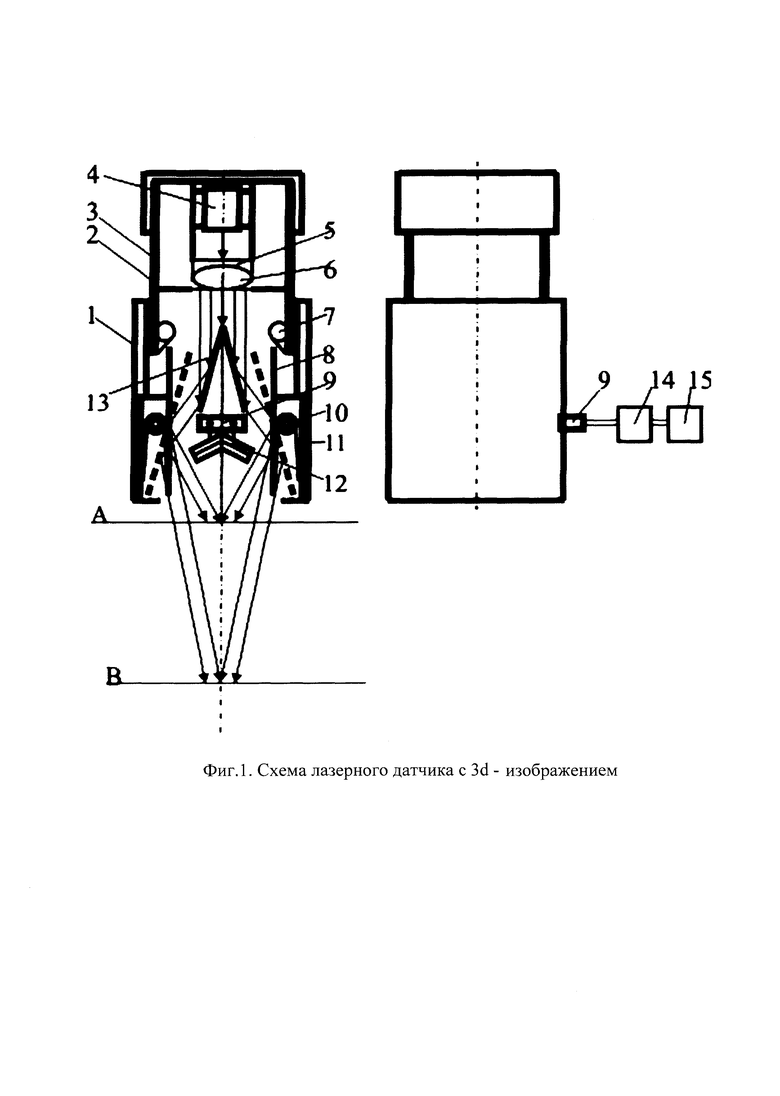
Сущность предлагаемого устройства заключается в том, что датчик содержит один инфракрасный полупроводниковый лазер луч которого проходит через рассеивающую и собирательную линзы, обеспечивая расширение диаметра луча лазера, который затем угловым зеркалом делится на два когерентных луча, направленных на регулируемые при помощи действия нижних выступов вращаемого верхнего корпуса на плоскость подпружиненных поворотных зеркал. Поворот зеркал позволяет изменять фокус проецируемых лучей, соответственно можно плавно изменять расстояние до измеряемой поверхности. Использование двух когерентных лучей для измерения поверхностей, направленных под одинаковыми углами с противоположных направлений, позволяет видеть объемное изображение поверхности предмета, которое отображается в угловой линейке прибора с зарядовой связью (ПЗС), а с нее считываемая информация поступает в блок обработки изображения и компьютер.
Схематично лазерное устройство для формирования 3D изображения показано на фиг. 1.
Лазерное устройство для формирования 3D изображения состоит из верхнего тубуса 3, имеющего на внешней поверхности у основания резьбу 2, отличающейся тем, что внутри жестко закреплены источник когерентного света 4, рассеивающая 5, собирающая 6 линзы, а также у основания имеются выступы 7 с плавной эллипсоидной поверхностью контактирующие с подвижными подпружиненными 11 зеркалами 8 ось 10 которых неподвижно закреплена в боковой стенке цилиндрического корпуса 1, а в середине его жестко закреплены угловое зеркало 13, а за ним угловая линейка прибора с зарядовой связью (ПЗС) биссектрисы которых совпадают с осью корпуса 1, функционально связанная с блоком обработки изображения 14 и компьютером 15.
Работает устройство следующим образом. Образец контролируемой поверхности детали устанавливается под корпус 1 в плоскости А. Включается осветитель (лазер). Световой луч источника света 4 падает на рассеивающую 5 и собирающую 6 линзы, а затем на угловое зеркало 13, где разделяется на два когерентных луча, которые отображаются в подвижных зеркалах 8 и фокусируются на поверхности детали в плоскости А. Отраженные лучи принимаются угловой линейкой ПЗС 12, а затем сигнал поступает на разъем 9, блок обработки изображения 14 и компьютер 15, где формируется 3D изображение. Закручивая тубус 3 по резьбе 2, выступы 7 воздействуют на поверхность подпружиненных 11 подвижных зеркал 8, изменяя их угол относительно падающих от углового зеркала 13 лучей. Соответственно меняется положение фокусного расстояния лучей, которое перемещается в плоскость В. В этом случае получим 3D - картинку в плоскости В. Интенсивность света в угловой линейке будет зависеть от расстояния от измеряемой детали до корпуса 1 лазерного датчика с 3d-изображением.
Применение лазерного датчика обеспечивает получение качественного 3D-изображения поверхности детали для качественного анализа ее состояния, а также позволяет измерять расстояние до поверхности детали, изменять масштаб спектра, автоматизировать процесс обработки полученного спектра, а малые габариты позволяют использовать при контроле сложных поверхностей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство компенсации погрешностей обработки на металлорежущих станках | 1986 |
|
SU1706836A1 |
| АКТИВНАЯ ОПТИЧЕСКАЯ СИСТЕМА С ПЕРЕМЕННЫМ РАЗРЕШЕНИЕМ | 2016 |
|
RU2721304C2 |
| Система лазерной засветки | 2023 |
|
RU2805780C1 |
| СВЕТОСИЛЬНЫЙ КР-ГАЗОАНАЛИЗАТОР | 2014 |
|
RU2583859C1 |
| СТЕРЕОЛИТОГРАФИЧЕСКАЯ УСТАНОВКА | 1995 |
|
RU2119430C1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ЗРЕНИЯ И ФУНКЦИОНАЛЬНОГО ЛЕЧЕНИЯ В ОФТАЛЬМОЛОГИИ | 2005 |
|
RU2294131C1 |
| УСТРОЙСТВА, СИСТЕМЫ И СПОСОБЫ ТРЕХМЕРНОЙ ПЕЧАТИ | 2014 |
|
RU2641945C2 |
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ И ФУНКЦИОНАЛЬНОГО ЛЕЧЕНИЯ В ОФТАЛЬМОЛОГИИ | 2005 |
|
RU2309662C2 |
| ЛАЗЕРНЫЙ ЦЕНТРАТОР ДЛЯ РЕНТГЕНОВСКОГО ИЗЛУЧАТЕЛЯ | 2006 |
|
RU2315446C2 |
| ИЗОБРАЖАЮЩИЙ МИКРОЭЛЛИПСОМЕТР | 2010 |
|
RU2503922C2 |
Изобретение откосится к области контрольно-измерительного оптико-механического оборудования. Лазерное устройство для формирования 3D изображения состоит из верхнего тубуса, имеющего на внешней поверхности у основания резьбу, отличается тем, что внутри жестко закреплены: источник когерентного света, рассеивающая, собирающая линзы, а также у основания имеются выступы с плавной эллипсоидной поверхностью, контактирующие с подвижными подпружиненными зеркалами, ось которых неподвижно закреплена в боковой стенке цилиндрического корпуса, а в середине его жестко закреплены угловое зеркало, а за ним угловая линейка ПЗС, биссектрисы которых совпадают с осью корпуса, функционально связанная с блоком обработки изображения и компьютером. Технический результат – повышение качества 3D изображения и уменьшение габаритов. 1 ил.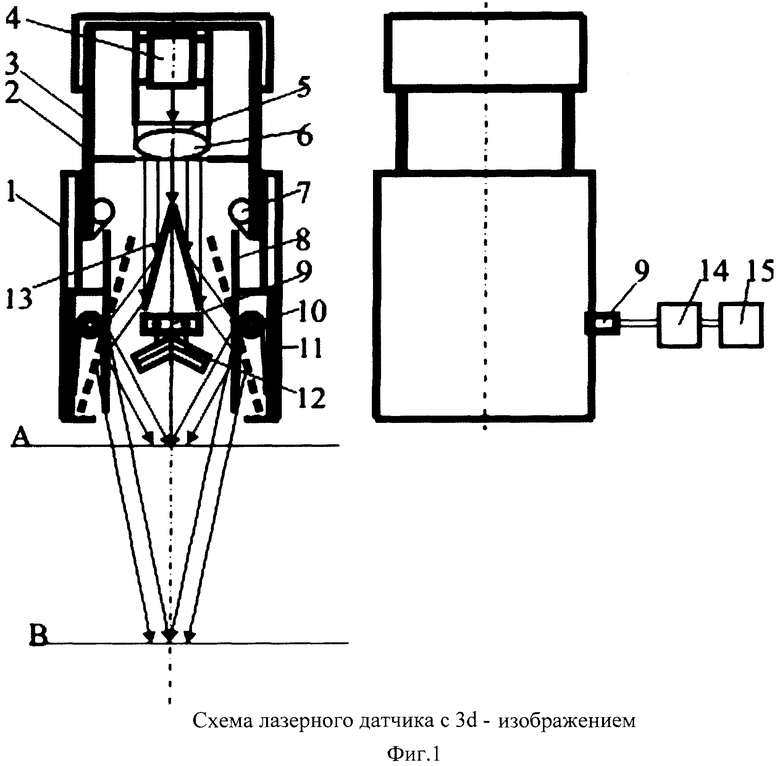
Лазерное устройство для формирования 3D изображения состоит из верхнего тубуса, имеющего на внешней поверхности у основания резьбу, отличающееся тем, что внутри жестко закреплены источник когерентного света, рассеивающая, собирающая линзы, а также у основания имеются выступы с плавной эллипсоидной поверхностью, контактирующие с подвижными подпружиненными зеркалами, ось которых неподвижно закреплена в боковой стенке цилиндрического корпуса, а в середине его жестко закреплены угловое зеркало, а за ним угловая линейка прибора с зарядовой связью (ПЗС), биссектрисы которых совпадают с осью корпуса, функционально связанная с блоком обработки изображения и компьютером.
| ЛАЗЕРНЫЙ ДАТЧИК ДЛЯ ОБНАРУЖЕНИЯ НЕСКОЛЬКИХ ПАРАМЕТРОВ | 2016 |
|
RU2717751C2 |
| ЛАЗЕРНЫЙ ПРОФИЛОМЕТР ДЛЯ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ПРОФИЛЯ ПОВЕРХНОСТИ | 2016 |
|
RU2650840C1 |
| ЛАЗЕРНЫЙ ПРОФИЛОМЕТР | 2008 |
|
RU2369835C1 |
| US 20120004865 A1, 05.01.2012 | |||
| Центробежный водоотделитель | 1928 |
|
SU12471A1 |
