Область техники
Изобретение относится к лазерному датчику или модулю лазерного датчика, использующим интерференцию самосмешения для обнаружения разных физических параметров, к пользовательскому интерфейсу, содержащему такой лазерный датчик или модуль лазерного датчика, к устройству мобильной связи, содержащему такой пользовательский интерфейс, к соответствующему способу обнаружения разных физических параметров и к соответствующему компьютерному программному продукту.
Уровень техники
Документ CN103868835 (A) раскрывает систему для отслеживания атмосферных загрязнителей с диаметром частиц 2,5 микрон и меньше (PM2.5) с помощью смартфона. Система снабжена маленьким и интеллектуальным сборщиком проб воздуха. Интеллектуальный сборщик проб воздуха может выполнять всасывание проб воздуха через человеческий рот, а также может выполнять сбор проб воздуха посредством воздушного насоса для сбора проб. Интеллектуальный сборщик проб воздуха и смартфон могут осуществлять связь друг с другом. Интеллектуальный сборщик проб воздуха измеряет количество и размер частиц пыли в воздухе способом лазерного рассеивания под управлением смартфона. Система является сложной и дорогой.
Документ US 2013/0120759 A1 раскрывает устройство для измерения расстояния. Блок интерференции самосмешения (SMI) формирует сигнал SMI, причем блок SMI содержит лазер, испускающий первый лазерный луч для того, чтобы направить его к объекту, и причем сигнал SMI зависит от интерференции первого лазерного луча и второго лазерного луча, отраженного объектом. Блок определения пиковой ширины определяет пиковую ширину сигнала SMI, и блок определения расстояния определяет расстояние между объектом и блоком SMI в зависимости от определенной пиковой ширины сигнала SMI.
Документ US 2015/0077735 A1 раскрывает устройство для определения скорости ветра, которое содержит по меньшей мере два лазерных источника, испускающих лучи в разных направлениях, которые являются компланарными, и в результате чего каждое направление испускания соответствует перпендикулярному направлению испускания. Каждый лазерный источник связан с фокусирующей оптикой для фокусировки испускаемого луча, лазерным диодом для приема отраженного луча, полученного после отражения частицей, существующей в воздухе, соответствующего испускаемого луча, фотодиодом для передачи сигнала интерференции, возникающего между испускаемым лучом и отраженным лучом, процессором для обработки полученных сигналов интерференции, и оптическим резонатором, в который повторно входит отраженный луч, чтобы получить интерференцию с испускаемым лучом.
Документ US 2013/0215411 A1 раскрывает лазерный Доплеровсий измеритель скорости, использующий усиление от обратного отражения от рассеивателей под поверхностью потока.
Документ WO 2014/167175 A1 раскрывает измеритель скорости, который содержит лазерный источник, содержащий лазерный резонатор для производства лазерного луча с непрерывной волной, детектор света и средство для направления первой части лазерного луча к движущейся цели вне измерителя скорости для производства рассеянного света от цели, рассеянный свет демонстрирует эффект Доплеровского смещения, соответствующий скорости движущейся цели. Кроме того, измеритель скорости содержит средство для направления рассеянного света обратно к лазерному резонатору для обеспечения частотной модуляции лазерного луча через возмущение в лазерном источнике и средство для направления второй части лазерного луча к детектору света. Также обеспечен оптический щелевой фильтр, выполненный с возможностью демодулировать упомянутый частотно-модулированный лазерный луч, прежде чем направить его к детектору света, и причем упомянутый лазерный источник выполнен с возможностью производить лазерный свет с длиной волны, соответствующей длине волны края оптического щелевого фильтра.
Сущность изобретения
Задача настоящего изобретения состоит в том, чтобы обеспечить улучшенный модуль лазерного датчика.
В соответствии с первым аспектом обеспечен модуль лазерного датчика. Модуль лазерного датчика содержит по меньшей мере один первый лазер, по меньшей мере один первый детектор, по меньшей мере один электропривод и по меньшей мере одно первое оптическое устройство. Первый лазер выполнен с возможностью испускать первый лазерный свет в ответ на сигналы, обеспеченные по меньшей мере одним электроприводом. Первое оптическое устройство выполнено с возможностью фокусировать первый лазерный свет к области фокусировки. Модуль лазерного датчика выполнен с возможностью управлять расстоянием между модулем лазерного датчика и областью фокусировки, в результате чего имеется по меньшей мере первый режим и второй режим модуля лазерного датчика. Модуль лазерного датчика выполнен таким образом, что существует по меньшей мере две разных области фокусировки. Область фокусировки находится в первом режиме на первом расстоянии, и во втором режиме область фокусировки находится на втором расстоянии, отличающемся от первого расстояния. По меньшей мере один первый детектор выполнен с возможностью обнаруживать первый сигнал интерференции самосмешения оптической волны в первом лазерном резонаторе первого лазера. Первый сигнал интерференции самосмешения вызван первым отраженным лазерным светом, повторно входящим в первый лазерный резонатор. Первый отраженный лазерный свет принимается в первом режиме. Первый сигнал интерференции самосмешения используется для определения первого физического параметра. Модуль лазерного датчика, особенно по меньшей мере один первый датчик, выполнен с возможностью обнаруживать второй сигнал интерференции самосмешения, причем второй сигнал интерференции самосмешения вызван вторым отраженным лазерным светом. Второй сигнал интерференции самосмешения определяется во втором режиме. Второй сигнал интерференции самосмешения используется для определения второго физического параметра, отличающегося от первого физического параметра.
Первый лазер предпочтительно может быть выполнен с возможностью испускать лазерный свет с длиной волны более 750 нм в инфракрасном диапазоне спектра, наиболее предпочтительно между 780 нм и 1300 нм спектра длины волны.
Первый лазер может представлять собой полупроводниковым лазером как испускатель или лазер поверхностного излучения с вертикальным резонатором (VCSEL).
Второй сигнал интерференции самосмешения может быть определен или обнаружен в первом лазерном резонаторе первого лазера. В качестве альтернативы может иметься по меньшей мере второй лазер со вторым лазерным резонатором, в котором может быть определен второй сигнал интерференции самосмешения. Первый детектор может быть интегрирован в первом лазере. Первый детектор может, например, представлять собой фотодиод, который содержится в структуре слоев первого лазера. Первый детектор в качестве альтернативы может являться внешним детектором, который может быть выполнен с возможностью, например, определять импеданс по меньшей мере первого лазерного резонатора для определения по меньшей мере первого сигнала интерференции самосмешения. Первый детектор может являться внешним фотодиодом, принимающим лазерный свет от первого лазера, причем лазерный свет содержит информацию о первом сигнале интерференции самосмешения. Лазерный свет, например, может быть модулирован вследствие интерференции в первом лазерном резонаторе.
Первый физический параметр относится к движению объекта для управления посредством жестов. Второй физический параметр относится к обнаружению частиц. Первый физический параметр, например, может содержать расстояние и/или скорость объекта относительно модуля лазерного датчика. Обнаружение частицы или частиц содержит плотность частиц в текучей среде, например, в воздухе, размер частиц и факультативно скорость частицы. Скорость частицы, например, может использоваться для определения скорости ветра. Обнаружение размера частиц и/или плотности частиц может использоваться для распознавания событий (нахождение позади грузовика с грязным дымом, или приготовление пищи, или уборка пылесосом, и т.д.). Поскольку частица на пути первого лазерного может быть сфокусирована в точке для увеличения сигнала самосмешения для мелких частиц, зона измерения является малой, и подвижное зеркало (например, зеркало MEMs) может использоваться для сканирования пятна и получения увеличенной зоны измерения. Квазиколлимированный луч первого лазерного света может использоваться для управления посредством жестов. Одна из областей фокусировки может находиться приблизительно в бесконечности (существенно параллельные лучи).
Модуль лазерного датчика может содержать блок манипуляции. Блок манипуляции может быть выполнен с возможностью изменять характеристику первого лазерного света, в результате чего обеспечиваются первый и второй режимы.
Модуль лазерного датчика может содержать контроллер. Контроллер может быть выполнен с возможностью обеспечивать управляющие сигналы для управления блоком манипуляции, в результате чего первый лазерный свет фокусируется в первой области фокусировки в первом режиме, и в результате чего первый лазерный свет фокусируется во второй области фокусировки во втором режиме. Контроллер может быть являться интегрированной частью блока манипуляции или отдельным объектом.
Модуль лазерного датчика может дополнительно содержать по меньшей мере второй лазер, причем второй лазер может быть выполнен с возможностью излучать второй лазерный свет в ответ на сигналы, обеспеченные по меньшей мере одним электроприводом. Первое оптическое расстояние между первым лазером и первым оптическим устройством может отличаться от второго оптического расстояния между вторым лазером и первым оптическим устройством. Блок манипуляции может быть выполнен с возможностью отображать первый лазерный свет посредством первого оптического устройства на первую область фокусировки в первом режиме. Блок манипуляции может быть выполнен с возможностью фокусировать второй лазерный свет посредством первого оптического устройства во второй области фокусировки, отличающейся от первой области фокусировки, во втором режиме.
Блок манипуляции может являться активным или пассивным устройством. Блок манипуляции, например, может содержать одно или более зеркал, которые выполнены с возможностью перенаправлять первый лазерный свет и второй лазерный свет к первому оптическому устройству. Блок манипуляции в качестве альтернативы может содержать полупрозрачное зеркало, в результате чего первый лазерный свет и второй лазерный свет могут достигать первого оптического устройства одновременно. Блока манипуляции в альтернативном подходе содержит поляризационный разделитель лучей. Первый и второй лазерный свет могут представлять собой поляризованный лазерный свет. Модуль лазерного датчика может содержать схему управления, которая может быть выполнена с возможностью попеременно переключать первый и второй лазер, чтобы обеспечить первый и второй режим в разные моменты времени.
Первое оптическое устройство может содержать блок манипуляции. Блок манипуляции может быть выполнен с возможностью обеспечивать по меньшей мере первое фокусное расстояние первого оптического устройства и второе фокусное расстояние первого оптического устройства, отличающееся от первого фокусного расстояния. Контроллер может быть выполнен с возможностью обеспечивать управляющие сигналы для управления блоком манипуляции, в результате чего первое оптическое устройство обеспечивает первое фокусное расстояние в первом режиме и второе фокусное расстояние во втором режиме. Блок манипуляции в сочетании с первым оптическим устройством может содержать линзу с адаптируемым фокусом, которой управляют посредством контроллера. Линза с адаптируемым фокусом, например, может быть основана на электросмачивании или жидких кристаллах. Блок манипуляции в сочетании с первым оптическим устройством в качестве альтернативы может содержать структуру линз. Расстоянием между разными линзами из структуры линзы можно управлять посредством контроллера, чтобы сфокусировать первый лазерный свет в различных областях фокусировки. Функциональность блока манипуляции, контроллера или электропривода может быть обеспечена отдельными блоками или интегрированными блоками.
Блок манипуляции может быть выполнен с возможностью изменять оптическое расстояние между первым лазером и первым оптическим устройством. Блок манипуляции преимущественно может быть выполнен с возможностью изменять расстояние между первым лазером и первым оптическим устройством. Блок манипуляции, например, может содержать устройство для смещения первого лазера и/или первого оптического устройства относительно друг друга.
Блок манипуляции в качестве альтернативы или в дополнение может содержать второе оптическое устройство. Второе оптическое устройство может быть выполнено с возможностью изменять оптическое расстояние между первым лазером и первым оптическим устройством. Второе оптическое устройство может содержать, например, одно или более зеркал, причем по меньшей мере одно из зеркал выполнено с возможностью изменять путь первого лазерного света между первым лазером и первым оптическим элементом.
Первое оптическое устройство в качестве альтернативы или в дополнение может содержать по меньшей мере один двоякопреломляющий элемент для обеспечения возможности первого режима и второго режима. Первое оптическое устройство может представлять собой один оптический блок или содержать два или более оптических блоков. Двоякопреломляющий элемент может содержать LiNbO3 (ниобат лития). Двоякопреломляющий элемент может содержать непериодическую фазовую структуру или периодическую дифракционную структуру.
Непериодическая фазовая структура, например, может быть обеспечена в двоякопреломляющем материале таким образом, что для 1 направления поляризации эффект является незначительным, поскольку только выполняются только шаги фазы 2 пи, и для другого направления поляризации добавляется дополнительная сила линзы, в результате чего лазерный свет с этой поляризацией фокусируется по-другому. Модуль лазерного датчика может быть выполнен с возможностью испускать лазерный свет с первой и второй поляризацией. Вторая поляризация отличается от первой поляризации. Вторая поляризация предпочтительно является ортогональной по отношению к первой поляризации.
Модуль лазерного датчика может дополнительно содержать контроллер. Первый лазер может быть выполнен с возможностью испускать первый лазерный свет с первой поляризацией и первый лазерный свет со второй поляризацией, отличающейся от первой поляризации. Контроллер может быть выполнен с возможностью обеспечивать управляющие сигналы для управления первым лазером, в результате чего первый лазер испускает первый лазерный свет с первой поляризацией в первом режиме и первый лазерный свет со второй поляризацией во втором режиме. Двоякопреломляющий элемент может быть выполнен с возможностью фокусировать первый лазерный свет с первой поляризацией в первой области фокусировки. Двоякопреломляющий элемент может быть дополнительно выполнен с возможностью фокусировать первый лазерный свет со второй поляризацией во второй области фокусировки, отличающейся от первой области фокусировки.
Контроллер, например, может периодически попеременно переключаться между первой и второй поляризацией. Контроллера может в альтернативном подходе переключаться между первой и второй поляризацией после приема соответствующих дополнительных управляющих сигналов. Первый лазер может содержать переключаемое устройство поляризации, чтобы обеспечивать первую и вторую поляризацию. Первый лазер, например, может представлять собой лазер VCSEL, при чем трансверсальное напряжение может быть приложено к мезаструктуре лазера VCSEL. Первый лазер в качестве альтернативы может содержать переключаемый вращатель поляризации, которым можно управлять посредством управляющих сигналов, обеспеченных контроллером. Переключаемый вращатель поляризации, например, может представлять собой электрооптический элемент, такой как жидкокристаллическая ячейка.
Модуль лазерного датчика может дополнительно содержать по меньшей мере второй лазер. Второй лазер может быть выполнен с возможностью испускать второй лазерный свет в ответ на сигналы, обеспеченные по меньшей мере одним электроприводом через первое оптическое устройство. Первый лазерный свет может содержать первую поляризацию, и второй лазерный свет может содержать вторую поляризацию, отличающуюся от первой поляризации. Двоякопреломляющий элемент выполнен с возможностью фокусировать первый лазерный свет в первой области фокусировки в первом режиме. Двоякопреломляющий элемент выполнен с возможностью фокусировать второй лазерный свет во второй области фокусировки, отличающейся от первой области фокусировки, во втором режиме.
Первый сигнал интерференции самосмешения в этом случае является независимым от второго сигнала интерференции самосмешения, который присутствует во втором лазерном резонаторе второго лазера. Первый сигнал интерференции самосмешения и второй сигнал интерференции самосмешения, таким образом, могут быть определены одновременно, или попеременно, или в зависимости от соответствующего переключающего сигнала.
Первое оптическое устройство в качестве альтернативы или в дополнение может быть выполнено с возможностью фокусировать первую часть первого лазерного света в первой области фокусировки и вторую часть первого лазерного света во второй области фокусировки. Первое оптическое устройство, например, может содержать сегментированную линзу. Первый сегмент сегментированной линзы может фокусировать первый лазерный свет на первом расстоянии. Второй сегмент сегментированной линзы может фокусировать первый лазерный свет на втором расстоянии.
Первый лазер может быть выполнен с возможностью испускать первый лазерный свет с первым шаблоном испускания в первом режиме. Первый лазер может быть дополнительно выполнен с возможностью испускать первый лазерный свет со вторым шаблоном испускания во втором режиме. Первый лазер, таким образом, может быть выполнен с возможностью освещать разные части первого оптического устройства посредством первого и второго шаблона испускания. Кроме того, могут иметься дополнительные оптические устройства, такие как адаптируемое зеркало или зеркала, которые могут использоваться, чтобы освещать разные части первого оптического устройства.
Первый лазер, например, может представлять собой лазер VCSEL, который может предпочтительно испускать в центрированной режиме (как Гауссовский) или в торообразном режиме. Известно, что предпочтительные режимы в лазерном резонаторе лазера VCSEL изменяются вместе с током. При низком токе центрированный режим может являться более выраженным, и при более высоком токе торообразный режим пончик. Это означает, что две разных рабочих точки могут использоваться для лазера VCSEL для первого и второго режима. Лазер VCSEL может, например, содержать несколько оксидных апертур или рельеф поверхностное для разделения двух режимов работы и стабилизации четко определенных режимов работы. В качестве альтернативы или в дополнение может использоваться тот факт, что шаблон испускания лазера VCSEL становится более широким при более высоком токе (вследствие более сильной тепловой линзы). Таким образом, в рабочей точке с более высоким током может использоваться больше внешней области сегментированной линзы. Электропривод может быть выполнен с возможностью подавать разный ток.
Модуль лазерного датчика может дополнительно содержать по меньшей мере второй лазер. Второй лазер может быть выполнен с возможностью излучать второй лазерный свет в ответ на сигналы, обеспеченные по меньшей мере одним электроприводом через первое оптическое устройство, причем первый лазерный свет содержит первую длину волны, и второй лазерный свет содержит вторую длину волны, отличающуюся от первой длины волны. Первое оптическое устройство может быть выполнено с возможностью фокусировать первый лазерный свет в первой области фокусировки в первом режиме. Первое оптическое устройство может быть дополнительно выполнено с возможностью фокусировать второй лазерный свет во второй области фокусировки, отличающейся от первой области фокусировки, во втором режиме.
Первое оптическое устройство, например, может содержать выборочную по длине волны непериодическую структуру или дифракционную структуру.
Первый лазер в альтернативном подходе может быть выполнен с возможностью испускать свет разных длин волн. Первый лазер может быть выполнен с возможностью переключаться между первой и второй длиной волны посредством соответствующих управляющих сигналов, чтобы обеспечить возможность первого и второго режимов.
Устройство с человеко-машинным интерфейсом может содержать по меньшей мере один модуль лазерного датчика в соответствии с любым описанным выше вариантом осуществления. Первый режим модуля лазерного датчика может быть выполнен с возможностью обеспечивать по меньшей мере часть функций ввода, обеспечиваемых устройством с человеко-машинным интерфейсом.
Модуль лазерного датчика, например, может быть интегрирован в сенсорном экране или другом устройстве ввода. Первый режим может использоваться, например, для поддержки обнаружения пальца, движущегося по меньшей мере по части сенсорного экрана. Первый режим в качестве альтернативы или в дополнение может использоваться для управления посредством жестов на определенном расстоянии между модулем лазерного датчика и, например, кистью руки пользователя. Второй режим модуля лазерного датчика, например, может использоваться для обнаружения загрязнения воздуха или в более общем случае частиц в воздухе.
Устройство мобильной связи может содержать по меньшей мере один модуль лазерного датчика или по меньшей мере одно устройство с человеко-машинным интерфейсом, содержащее по меньшей мере один модуль лазерного датчика.
В соответствии с дополнительным аспектом представлен способ обнаружения по меньшей мере двух физических параметров. Способ содержит этапы:
- испускания первого лазерного света посредством первого лазера,
- фокусировки первого лазерного света в области фокусировки,
- управление расстоянием между модулем лазерного датчика и областью фокусировки, в результате чего имеются по меньшей мере первый режим и второй режим, причем в первом режиме область фокусировки находится на первом расстоянии, и во втором режиме область фокусировки находится на втором расстоянии, отличающемся от первого расстояния,
- принимают первый отраженный лазерный света в первом лазерном резонаторе первого лазера,
- определяют первый сигнал интерференции самосмешения оптической волны в первом лазерном резонаторе первого лазера, причем первый сигнал интерференции самосмешения вызван первым отраженным первым лазерным светом, повторно входящим в первый лазерный резонатор, первый отраженный лазерный свет принимается в первом лазерном резонаторе в первом режиме,
- использование первого сигнала интерференции самосмешения для определения первого физического параметра,
- определение второго сигнала интерференции самосмешения во втором режиме, причем второй сигнал интерференции самосмешения вызван вторым отраженным лазерным светом,
- использование второго сигнала интерференции самосмешения для определения второго физического параметра, отличающегося от первого физического параметра.
Этапы способа не обязательно выполняются в представленном выше порядке.
В соответствии с дополнительным аспектом представлен компьютерный программный продукт. Компьютерный программный продукт содержит кодовое средство, которое может быть сохранено по меньшей мере на одном запоминающем устройстве модуля лазерного датчика по любому из пп. 1-11 или по меньшей мере на одном запоминающем устройстве устройства, содержащего модуль лазерного датчика. Кодовое средство выполнено таким образом, что способ по п. 14 может быть исполнен посредством по меньшей мере одного устройства обработки модуля лазерного датчика по любому из пп. 1-11 или посредством по меньшей мере одного устройства обработки устройства, содержащего модуль лазерного датчика. Запоминающее устройство или устройство обработки могут содержаться в модуле лазерного датчика (электропривод, контроллер и т.д.) и/или в устройстве, содержащем модуль лазерного датчика. Первое запоминающее устройство и/или первое устройство обработки устройства, содержащего модуль лазерного датчика, могут взаимодействовать со вторым запоминающим устройством и/или вторым устройством обработки, содержащемся в модуле лазерного датчика. Устройство, содержащее модуль лазерного датчика, может представлять собой устройство с человеко-машинным интерфейсом или устройство мобильной связи.
Следует понимать, что модуль лазерного датчика по любому из пп. 1-11 и способ по п. 14 имеют сходные и/или идентичные варианты осуществления, в частности, как определено в зависимых пунктах формулы изобретения.
Следует понимать, что предпочтительный вариант осуществления изобретения также может представлять собой любую комбинацию зависимых пунктов формулы изобретения с соответствующим независимым пунктом формулы изобретения.
Далее определены предпочтительные варианты осуществления.
Краткое описание чертежей
Эти и другие аспекты изобретения будут очевидны и разъяснены со ссылкой на варианты осуществления, описанные далее.
Теперь посредством примера будет описано изобретение на основе вариантов осуществления со ссылкой на прилагаемые чертежи.
На чертежах:
Фиг. 1 показывает основной эскиз первого модуля лазерного датчика
Фиг. 2 показывает основной эскиз второго модуля лазерного датчика
Фиг. 3 показывает основной эскиз третьего модуля лазерного датчика
Фиг. 4 показывает основной эскиз четвертого модуля лазерного датчика
Фиг. 5 показывает основной эскиз пятого модуля лазерного датчика
Фиг. 6 показывает основной эскиз шестого модуля лазерного датчика
Фиг. 7 показывает основной эскиз седьмого модуля лазерного датчика
Фиг. 8 показывает основной эскиз восьмого модуля лазерного датчика
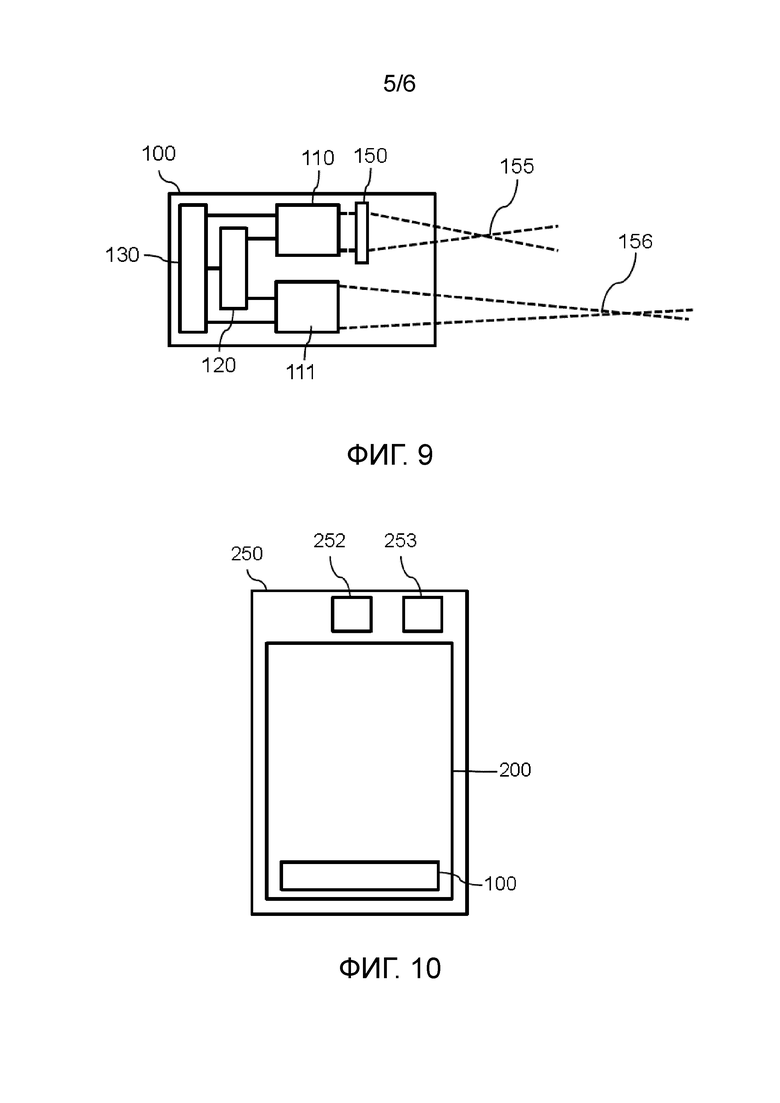
Фиг. 9 показывает основной эскиз девятого модуля лазерного датчика
Фиг. 10 показывает устройство мобильной связи, содержащее модуль лазерного датчика
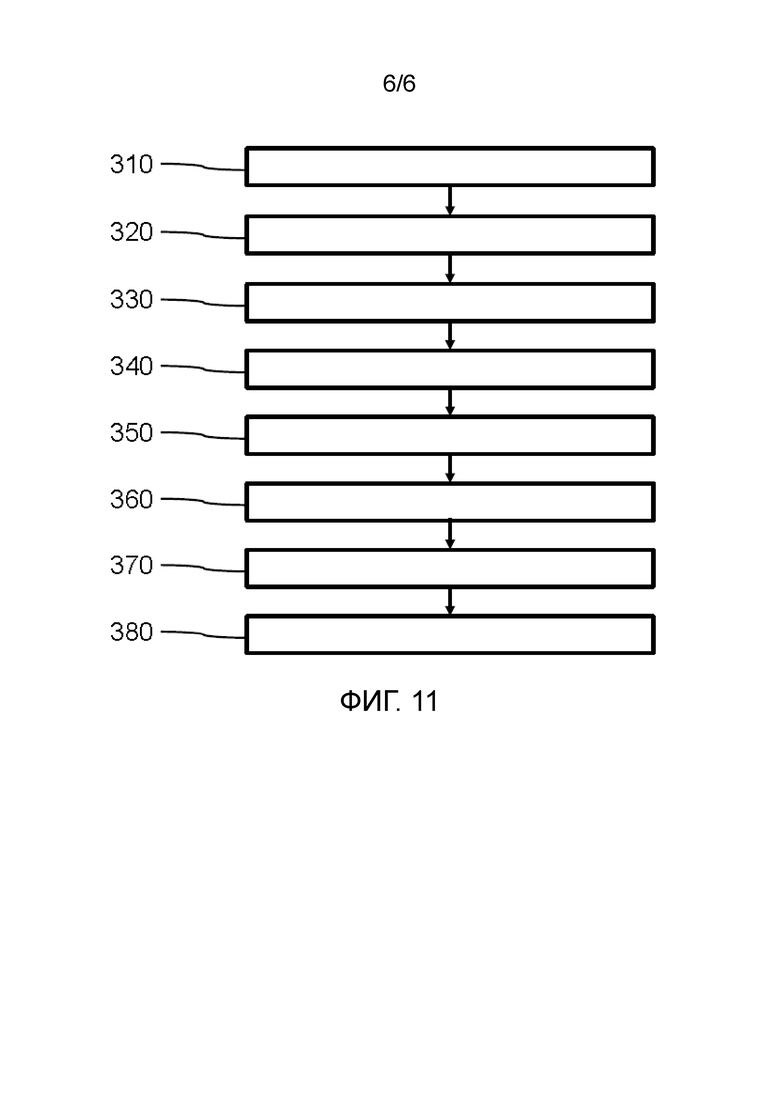
Фиг. 11 показывает основной эскиз способа обнаружения по меньшей мере двух физических параметров
На фигурах одинаковые номера везде относятся к одинаковым объектам. Объекты на фигурах не обязательно изображены в масштабе.
Подробное описание вариантов осуществления
Теперь различные варианты осуществления изобретения будут описаны посредством фигур.
Интерференция самосмешения используется для обнаружения движения и расстояния до объекта. Справочная информация об интерференции самосмешения описана в литературе ʺLaser diode self-mixing technique for sensing applicationsʺ, Giuliani, G.; Norgia, M.; Donati, S. & Bosch, T., Laser diode self-mixing technique for sensing applications, Journal of Optics A: Pure and Applied Optics, 2002, 4, S. 283 - S. 294, которая включена в настоящую заявку посредством ссылки. Обнаружение движения кончика пальца относительно датчика в оптическом устройстве ввода подробно описано в международной заявке на патент WO 02/37410. Раскрытие относительно обнаружения расстояния и движения в международной заявке на патент WO 02/37410 включено в настоящую заявку посредством ссылки.
Принцип интерференции самосмешения обсуждается на основе примеров, представленных в международной заявке на патент WO 02/37410. Диодный лазер, имеющий лазерный резонатор, обеспечен для испускания или измерения лазерного луча. На его верхней стороне устройство снабжено прозрачным окном, по которому перемещается объект, например, палец человека. Линза, например, плосковыпуклая линза размещена между диодным лазером и окном. Эта линза фокусирует лазерный луч на верхней стороне или около верхней стороны прозрачного окна. Если объект присутствует в этой позиции, он рассеивает измеряющий луч. Часть излучения измеряющего луча рассеивается в направлении луча освещения, и эта часть сводится с помощью линзы на поверхности испускания лазерного диода и повторно входит в резонатор этого лазера. Излучение, повторно входящее во резонатор диодного лазера, вызывает изменение усиления лазера и, таким образом, интенсивности излучения, испускаемого лазером, и это явление называют эффектом самосмешения в диодном лазере.
Изменение интенсивности излучения, испускаемого лазером, может быть обнаружено фотодиодом, обеспеченным с этой целью, и этот диод преобразовывает изменение излучения в электрический сигнал, и для обработки этого электрического сигнала обеспечивается электронная схема.
Движение объекта относительно измеряющего луча заставляет отраженное тем самым излучение подвергаться эффекту Доплера. Это означает, что частота этого излучения изменяется, или возникает сдвиг частоты. Этот сдвиг частоты зависит от скорости, с которой объект перемещается, и составляет порядка от нескольких кГц до МГц. Излучение со смещенной частотой, повторно входящее в лазерный резонатор, вызывает интерференцию с оптической волной или излучением, сформированным в этом резонаторе, т.е., в этом резонаторе возникает эффект самосмешения. Зависящая от величины сдвига фазы между оптической волной и излучением, повторно входящим в резонатор, интерференция будет конструктивной или отрицательной, т.е., интенсивность лазерного излучения увеличивается или уменьшается периодически. Частота модуляции лазерного излучения, сформированного таким образом, точно равна разности между частотой оптической волны в резонаторе и частотой излучения со смещением Доплера, повторно входящим в резонатор. Разность частоты имеет порядок от нескольких кГц до МГц, и, таким образом, ее легко обнаружить. Комбинация эффекта самосмешения и эффекта Доплера вызывает изменение поведения лазерного резонатора; в частности, изменяются его коэффициент усиления или усиление света. Импеданс лазерного резонатора или интенсивность излучения, испускаемого лазером, например, могут быть измерены, и может быть оценено не только количество движения объекта относительно датчика (т.е., пройденное расстояние), но также быть определено направление движения, как подробно описано в международной заявке на патент WO 02/37410.
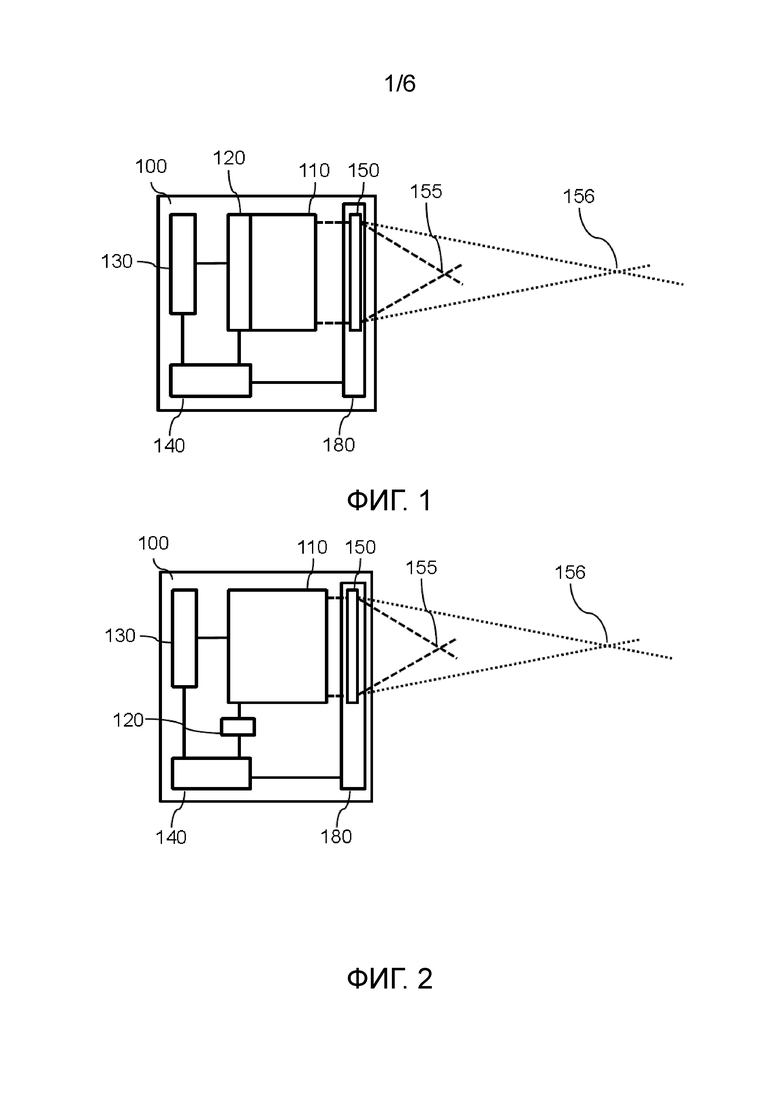
Фиг. 1 показывает основной эскиз первого модуля 100 лазерного датчика. Первый модуль 100 лазерного датчика содержит первый лазер 110 с интегрированным первым детектором 120. Интегрированный первый детектор 120 представляет собой интегрированный фотодиод, который является частью структуры слоев первого лазера 110. Первый модуль 100 лазерного датчика дополнительно содержит электропривод 130, контроллер 140 и блок 180 манипуляции, содержащий первое оптическое устройство 150. Контроллер 140 соединен с первым лазером 110, или больше точно с первым детектором 120 и электроприводом 130. Электропривод 130 подает электроэнергию на первый лазер 110, чтобы испустить первый лазерный свет. Первый лазер 110 в этом случае представляет собой лазер поверхностного излучения с вертикальным резонатором (VCSEL) с интегрированным фотодиодом. Модуль 100 лазерного датчика соединен с источником электропитания (не показан), который обеспечивает электроэнергию, которая модулируется и подается посредством электропривода 130. Электропривод 130 выполнен с возможностью обеспечивать постоянный ток возбуждения или треугольный ток возбуждения. Контроллер 140 далее соединен с блоком 180 манипуляции, чтобы обеспечить управляющие сигналы, для изменения фокусных расстояний первого оптического устройства 150. Первое оптическое устройство 150 в этом случае представляет собой линзу с эффектом электросмачивания. Контроллер 140 дополнительно выполнен с возможностью принимать электрические сигналы, обеспеченные первым детектором 120, которые вызваны посредством первого сигнала интерференции самосмешения или вторым сигналом интерференции самосмешения. Контроллер 140 дополнительно принимает информацию от электропривода 130 и от блока 180 манипуляции. Первый лазерный свет, испускаемый первым лазером 110, фокусируется посредством первого оптического устройства 150 в первой области 155 фокусировки или во второй области 156 фокусировки, отличающейся от первой области фокусировки. Частица может быть обнаружена в диапазоне вокруг первой области 155 фокусировки. Управление с помощью жестов может быть обеспечено, если первый лазерный свет сфокусирован во второй области 156 фокусировки. Контроллер 140 может автоматически переключаться между первым и вторым режимом. В качестве альтернативы контроллер 140 может быть выполнен с возможностью переключаться между первым и вторым в наибольшей степени приема соответствующего управляющего сигнала. Модуль 2 лазерного датчика может содержать переключатель для обеспечения такого управляющего сигнала для переключения между двумя режимами. В качестве альтернативы контроллер 140 может содержать интерфейс с внешним устройством, чтобы принимать управляющий сигнал для переключения между двумя режимами. Линза с эффектом электросмачивания может быть помещена на таком расстоянии, что, например, 1/e^2 диаметра интенсивности Гауссовского луча первого лазерного света составляет между 0,8 и 1,2 мм (длина волны 850 нм). Это размещение может достигнуть хорошего сигнала самосмешения по большому расстоянию (0-50 см) во втором режиме. Первый режим может быть выполнен посредством регулировки фокусного расстояния линзы с эффектом электросмачивания таким образом, что пятно формируется с числовой апертурой (NA), например, порядка 0,1. Первый модуль 100 лазерного датчика может быть объединен с подвижным зеркалом, как обсуждается ниже.
Фиг. 2 показывает основной эскиз второго модуля 100 лазерного датчика. Второй модуль лазерного датчика содержит первый лазер 110. Первый детектор 120 размещен как внешняя измерительная схема, которая определяет напряжение через первый лазерный резонатор или, в более общем случае, импеданс первого лазерного резонатора, который находится под влиянием первого сигнала интерференции самосмешения. Второй модуль 100 лазерного датчика дополнительно содержит электропривод 130. Электропривод 130 подает электроэнергию на первый лазер110, чтобы испускать первый лазерный свет. Первый лазер 110 в этом случае представляет собой полупроводниковый лазер бокового свечения. Модуль 100 лазерного датчика соединен с источником электропитания (не показан), который обеспечивает электроэнергию, которая модулируется и подается посредством электропривода 130. Электропривод 130 выполнен с возможностью обеспечивать постоянный ток возбуждения. Контроллер 140 дополнительно соединен с блоком 180 манипуляции, чтобы обеспечить управляющие сигналы для изменения фокусного расстояния первого оптического устройства 150. Первое оптическое устройство 150 в этом случае представляет собой структуру линз, которые могут быть смещены друг относительно друга. Контроллер 140 дополнительно выполнен с возможностью принимать электрические сигналы, обеспеченные первым детектором 120, которые вызваны первым сигналом интерференции самосмешения или вторым сигналом интерференции самосмешения. Контроллер 140 дополнительно принимает информацию от электропривода 130. Информация относительно статуса блока 180 манипуляции берется из управляющих сигналов, обеспеченных блоку 180 манипуляции. Первый лазерный свет, испускаемый первым лазером 110, фокусируется посредством первого оптического устройства 150 в первой области 155 фокусировки или во второй области 156 фокусировки, отличающейся от первой области фокусировки. Второй модуль 100 лазерного датчика может быть объединен с подвижным зеркалом, как обсуждается ниже.
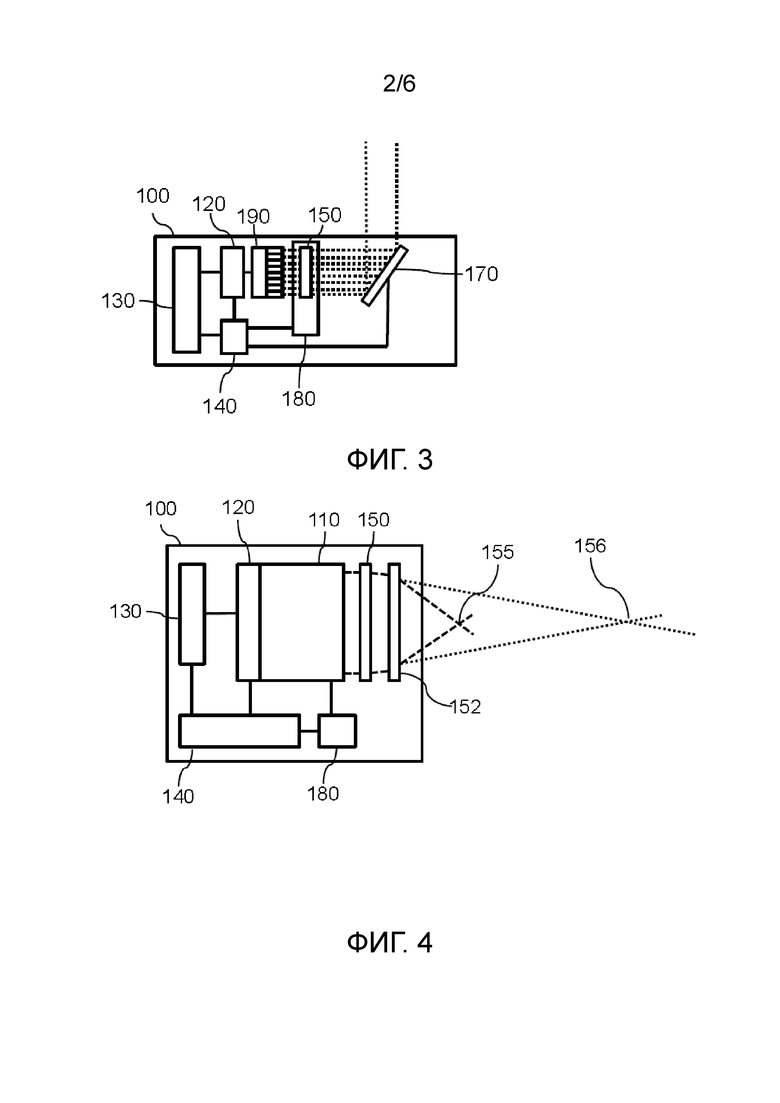
Фиг. 3 показывает основной эскиз третьего модуля 100 лазерного датчика. Третий модуль 100 лазерного датчика содержит лазерную матрицу 190, содержащую первый лазер 110 и множество других лазеров, испускающих лазерный свет. Третий модуль 100 лазерного датчика дополнительно содержит один общий первый детектор 120, электропривод 130, контроллер 140 и блок 180 манипуляции, содержащий первое оптическое устройство 150 и подвижное зеркало 170. Контроллер 140 соединен с первым детектором 120, электроприводом 130, блоком 180 манипуляции и подвижным зеркалом 170. Электропривод 130 подает электроэнергию на лазеры лазерной матрицы, чтобы испускать лазерный свет. Электропривод 130 может обеспечивать модулированный ток возбуждения (например, прямоугольный ток возбуждения). Контроллер 140 принимает электрические сигналы, обеспеченные первым детектором 120, которые вызваны сигналами интерференции самосмешения, сформированными в лазерных резонаторах лазеров лазерной матрицы 190. Детектор 120 выполнен с возможностью идентифицировать, какой лазер лазерной матрицы 190 сформировал сигнал интерференции самосмешения. Детектор 120 содержит схему для индивидуального определения импеданса по разным лазерным резонаторам лазеров лазерной матрицы 190. Контроллер 140 дополнительно принимает информацию от электропривода 130 и подвижного зеркала 170, чтобы интерпретировать сигналы интерференции самосмешения, измеренные первым детектором 120. Информация, предоставленная электроприводом 130, может содержать ток, обеспеченный в предопределенный момент времени. Контроллер 140 дополнительно выполнен с возможностью управлять движением подвижного зеркала 170 посредством соответствующих управляющих сигналов. Управляющие сигналы, обеспеченные контроллером 140, могут определять угловую скорость, амплитуду движения зеркала и т.п. Первое оптическое устройство 150 выполнено с возможностью фокусировать лазерный свет, испускаемый разными лазерами лазерной матрицы, в первой области фокусировки в первом режиме и во второй области фокусировки во втором режиме при приеме соответствующих управляющих сигналов от контроллера 140. Первое оптическое устройство 150 может, например, содержать матрицу микролинз. Первое оптическое устройство 150 может предпочтительно быть выполнено с возможностью фокусировать лазерный свет в первой или второй области фокусировки после отражения посредством подвижного зеркала 170. Подвижное зеркало увеличивает зону обнаружения в первом и втором режиме.
Фиг. 4 показывает основной эскиз четвертого модуля 100 лазерного датчика. Четвертый модуль 100 лазерного датчика содержит первый лазер 110 с интегрированным первым детектором 120. Интегрированный первый детектор 120 представляет собой интегрированным фотодиодом, который является частью структуры слоев первого лазера 110. Первый модуль 100 лазерного датчика дополнительно содержит электропривод 130, контроллер 140, блок 180 манипуляции, первое оптическое устройство 150 и двоякопреломляющий элемент 152. Контроллер 140 соединен с первым лазером 110 и электроприводом 130. Электропривод 130 подает электроэнергию на первый лазер 110, чтобы испускать первый лазерный свет. Первый лазер 110 в этом случае представляет собой лазер поверхностного излучения с вертикальным резонатором (VCSEL) с интегрированным фотодиодом. Модуль 100 лазерного датчика соединен с источником питания (не показан), который обеспечивает электроэнергию, которая модулируется и подается посредством электропривода 130. Электропривод 130 выполнен с возможностью обеспечивать постоянный ток возбуждения или треугольный ток возбуждения. Контроллер 140 дополнительно соединен с блоком 180 манипуляции, чтобы обеспечивать управляющие сигналы для изменения поляризации первого лазерного света, испускаемого первым лазером 110. Блок 180 манипуляции выполнен с возможностью обеспечивать трансверсальное напряжение через первый лазерный резонатор первого лазера 110, чтобы переключить поляризацию. Двоякопреломляющий элемент 152 содержит двоякопреломляющий материал с непериодической фазовой структурой. Первый лазерный свет фокусируется в первой области 155 фокусировки, если трансверсальное напряжение приложено таким образом, что первый лазерный свет характеризуется первой трансверсальной поляризацией. Первый лазерный свет фокусируется во второй области 156 фокусировки, если трансверсальное напряжение не приложено посредством блока 180 манипуляции. Первый лазерный свет в этом случае характеризуется второй трансверсальной поляризацией, являющейся ортогональной по отношению к первой трансверсальной поляризации. Четвертый модуль 100 лазерного датчика может быть объединен с подвижным зеркалом, как обсуждалось выше.
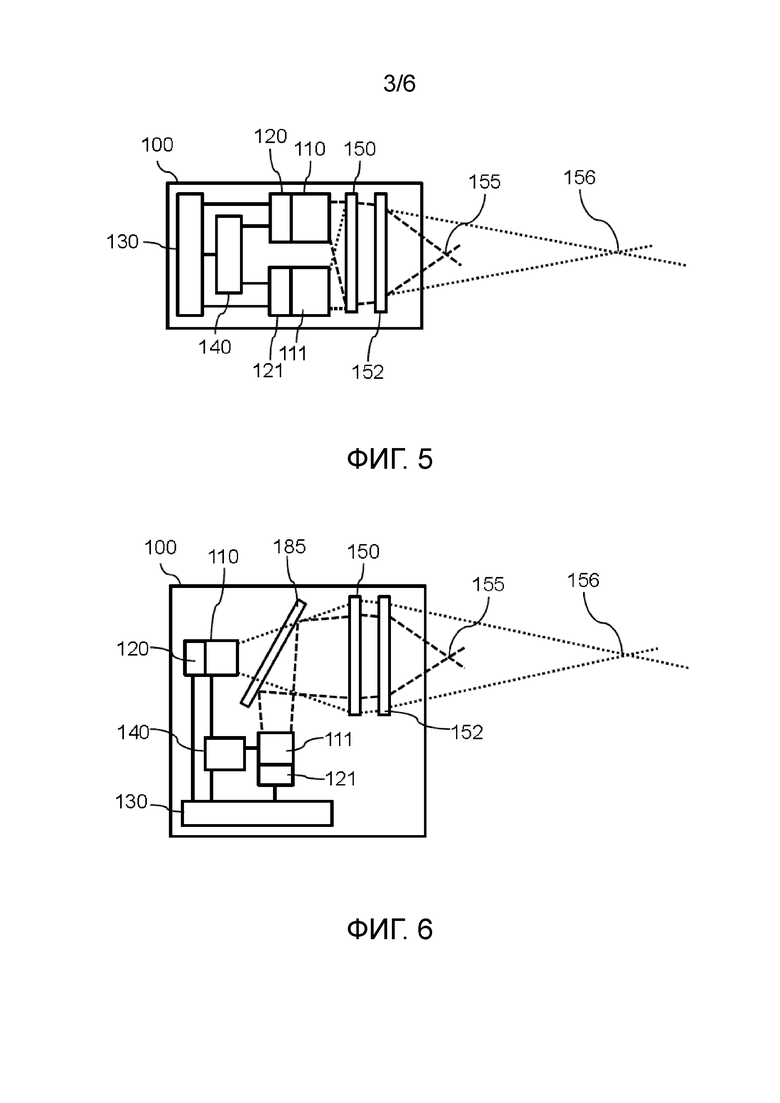
Фиг. 5 показывает основной эскиз 100 пятого модуля лазерного датчика. Пятый модуль 100 лазерного датчика содержит первый лазер 110 с интегрированным первым детектором 120 и второй лазер 111 с интегрированным вторым детектором 121. Первый лазер 110 испускает первый лазерный свет с длиной волны 850 нм, характеризуемый первой трансверсальной поляризацией. Второй лазер 111 испускает второй лазерный свет с длиной волны 850 нм, характеризуемый второй трансверсальной поляризацией, ортогональной по отношению к первой трансверсальной поляризации. Пятый модуль 100 лазерного датчика содержит электропривод 130, который выполнен с возможностью обеспечивать ток возбуждения первому лазеру 110 и второму лазеру 111. Пятый модуль 100 лазерного датчика дополнительно содержит контроллер 140, который соединен с первым лазером 110 и вторым лазером 111. Пятый модуль 100 лазерного датчика дополнительно содержит первое оптическое устройство 150 и двоякопреломляющий элемент 152 для фокусировки первого лазерного света в первой области 155 фокусировки и для фокусировки второго лазерного света во второй области фокусировки. Контроллер 140 принимает электрические сигналы, обеспеченные первым детектором 120, которые вызваны первым сигналом интерференции самосмешения, и электрические сигналы, обеспеченные вторым детектором 121, которые вызваны вторым сигналом интерференции самосмешения во втором лазерном резонаторе второго лазера 121. Контроллер 140 дополнительно принимает информацию от электропривода 130. Независимое управление первым лазером 110 и вторым лазером 111 дает возможность параллельного использования первого и второго режима пятого модуля 100 лазерного датчика. Параллельное обнаружение посредством первого лазера 110 и второго лазера 111 и соответствующих детекторов может увеличить зону обнаружения. Пятый модуль 100 лазерного датчика, очевидно, может быть объединен с подвижным зеркалом, как обсуждалось выше.
Фиг. 6 шоу показывает эскиз шестого модуля 100 лазерного датчика. Шестой модуль 100 лазерного датчика очень похож на пятый модуль 100 лазерного датчика. Существенное отличие состоит в том, что первый и второй лазеры 110, 111 размещены не параллельно, а первый лазер имеет оптическую ось, которая ортогональна по отношению к оптической оси второго лазера 111. Второе оптическое устройство 185 обеспечено, чтобы проецировать первый и второй лазерный свет на первое оптическое устройство 150, которое в этом случае представляет собой единственную фокусирующую линзу. Второе оптическое устройство 185 представляет собой поляризационный расщепитель луча, в результате чего первый лазерный свет характеризуется другой (ортогональной) поляризацией по сравнению со вторым лазерным светом. Первый лазерный свет фокусируется в первой области 155 фокусировки. Второй лазерный свет фокусируется во второй области 156 фокусировки. Размещение первого и второго лазеров 110, 111 может иметь преимущество в том, что первое оптическое расстояние между первым лазером 110 и первым оптическим устройством 150 и второе оптическое расстояние между вторым лазером 111 и первым оптическим устройством 150 могут отличаться. Расстояние между первой областью 155 фокусировки и второй областью 156 фокусировки, таким образом, может адаптироваться посредством первого и второго оптического расстояний. Шестой модуль 100 лазерного датчика может быть объединен с подвижным зеркалом, как обсуждалось выше.
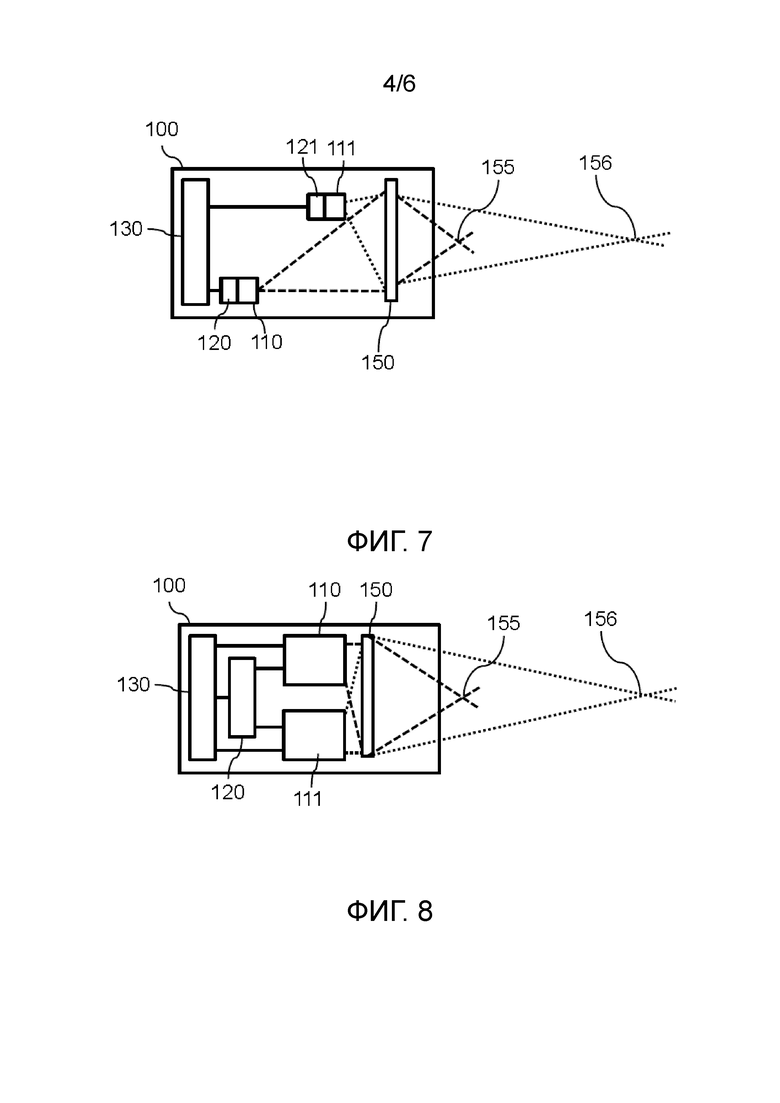
Фиг. 7 показывает основной эскиз седьмого модуля 100 лазерного датчика. Седьмой модуль 100 лазерного датчика содержит первый лазер 110 с интегрированным первым детектором 120 и второй лазер 111 с интегрированным вторым детектором 121. Седьмой модуль 100 лазерного датчика содержит электропривод 130, который выполнен с возможностью обеспечивать ток возбуждения первому лазеру 110 и второму лазеру 111. Седьмой модуль 100 лазерного датчика дополнительно содержит первое оптическое устройство 150, содержащее в этом случае структуру линз для фокусировки первого лазерного света, испускаемого первым лазером 110, и второго лазерного света, испускаемого вторым лазером 111. Первый и второй лазеры 110, 111 испускают неполяризованный первый и второй лазерный свет с длиной волны 980 нм. Первое оптическое расстояние между первым лазером 110 и первым оптическим устройством 150 отличается от второго оптического расстояния между вторым лазером 111 и первым оптическим устройством 150. Первый лазерный свет, таким образом, фокусируется в первой области 155 фокусировки, и второй лазерный свет фокусируется во второй области 156 фокусировки, отличающейся от первой области 155 фокусировки. Разные оптические расстояния дают возможность обнаружения по меньшей мере двух физических параметров в первом и втором режиме седьмого модуля 100 лазерного датчика. Седьмой модуль 100 лазерного датчика может быть объединен с подвижным зеркалом, как обсуждалось выше.
Фиг. 8 показывает основной эскиз восьмого модуля 100 лазерного датчика. Восьмой модуль 100 лазерного датчика содержит первый лазер 110 и второй лазер 111. Первый лазер 110 испускает первый лазерный свет с длиной волны 880 нм. Второй лазер 111 испускает второй лазерный свет с длиной волны 1050 нм. Восьмой модуль 100 лазерного датчика содержит первое оптическое устройство 150. Восьмой модуль 100 лазерного датчика содержит общий первый детектор 120. Первый детектор принимает электрические сигналы первого и второго лазеров 110, 111 в ответ на первый или второй сигнал интерференции самосмешения. Первое оптическое устройство 150 содержит выборочную по длине волны непериодическую структуру. Первый лазерный свет фокусируется в первой области 155 фокусировки. Второй лазерный свет фокусируется во второй области фокусировки, отличающейся от первой области 155 фокусировки. Восьмой модуль 100 лазерного датчика дополнительно содержит электропривод 130, который выполнен с возможностью обеспечивать ток возбуждения первому лазеру 110 и второму лазеру 111. Ток возбуждения обеспечивается попеременно первому и второму лазерам 110, 111. Общий первый детектор 120, таким образом, принимает только один сигнал измерения либо от первого, либо от второго лазера 110, 111 в один момент времени. Восьмой модуль 100 лазерного датчика может быть объединен с подвижным зеркалом, как обсуждалось выше.
Фиг. 9 показывает основной эскиз девятого модуля 100 лазерного датчика. Девятый модуль 100 лазерного датчика содержит первый лазер 110 и второй лазер 111. Первый лазер 110 испускает первый лазерный свет с длиной волны 880 нм. Второй лазер 111 испускает второй лазерный свет с длиной волны 880 нм. Девятый модуль 100 лазерного датчика содержит первое оптическое устройство 150. Девятый модуль 100 лазерного датчика содержит общий первый детектор 120. Первый детектор принимает электрические сигналы первого и второго лазеров 110, 111 в ответ на первый или второй сигнал интерференции самосмешения. Первое оптическое устройство 150 содержит линзу, которая размещена для фокусировки только первого лазерного света, испускаемого первым лазером 110, в первой области 155 фокусировки. Второй лазер 111 размещен таким образом, что второй лазерный свет фокусируется во второй области фокусировки, отличающейся от первой области 155 фокусировки. Девятый модуль 100 лазерного датчика дополнительно содержит электропривод 130, который выполнен с возможностью обеспечивать ток возбуждения первому лазеру 110 и второму лазеру 111. Ток возбуждения обеспечивается попеременно первому и второму лазерам 110, 111. Общий первый детектор 120, таким образом, принимает только один сигнал измерения либо от первого, либо от второго лазера 110, 111 в один момент времени. Девятый модуль 100 лазерного датчика может быть объединен с подвижным зеркалом, как обсуждалось выше.
Фиг. 10 показывает устройство 250 мобильной связи, содержащее модуль 100 лазерного датчика. Устройство 250 мобильной связи содержит устройство 200 с человеко-машинным интерфейсом, которое содержит модуль 100 лазерного датчика, устройство 250 мобильной связи дополнительно содержит основное устройство 252 обработки и основное запоминающее устройство 253. Основное устройство 252 обработки соединено с основным запоминающим устройством 243 и с модулем 100 лазерного датчика. Основное устройство 252 обработки содержит по меньшей мере часть функциональности контроллера 140, которая описана выше. Основное устройство 252 обработки сохраняет данные, относящиеся к первому физическому параметру и/или второму физическому параметру, в основном запоминающем устройстве 253. В альтернативном варианте осуществления также может быть возможно, что основное устройство 252 обработки и основное запоминающее устройство 253 используется только для подготовки или адаптации данных, обеспеченных посредством модуля 100 лазерного датчика, в результате чего данные могут быть представлены пользователю устройства 250 мобильной связи посредством устройства 200 с человеко-машинным интерфейсом. Модуль 100 лазерного датчика получает электроэнергию посредством источника электропитания устройства 250 мобильной связи. Первый физический параметр относится к обнаружению частиц (атмосферные загрязнители с диаметром частиц 2,5 микрон и меньше), и второй физический параметр относится к распознаванию жеста как части устройства 200 с человеко-машинным интерфейсом.
Фиг. 11 показывает основной эскиз способа обнаружения по меньшей мере двух физических параметров. На этапе 310 первый лазерный свет испускается посредством первого лазера 110. Первый лазерный свет фокусируется в области 155, 156 фокусировки на этапе 320. Расстоянием между модулем 100 лазерного датчика и областью 155, 156 фокусировки управляют на этапе 330, в результате чего имеется по меньшей мере первый режим и второй режим, причем в первом режиме область 155 фокусировки находится на первом расстоянии, и во втором режиме область 156 фокусировки находится на втором расстоянии, отличающемся от первого расстояния. На этапе 340 первый отраженный лазерный свет принимается в первом лазерном резонаторе первого лазера 110. Первый сигнал интерференции самосмешения оптической волны в первом лазерном резонаторе первого лазера определяется на этапе 350, причем первый сигнал интерференции самосмешения вызван первым отраженным первым лазерным светом, повторно входящим в первый лазерный резонатор, первый отраженный лазерный свет принимается в первом лазерном резонаторе в первом режиме. Первый сигнал интерференции самосмешения используется на этапе 360 для определения первого физического параметра. Второй сигнал интерференции самосмешения определяется на этапе 370 во втором режиме, причем второй сигнал интерференции самосмешения вызван вторым отраженным лазерным светом. Второй сигнал интерференции самосмешения используется на этапе 380 для определения второго физического параметра, отличающегося от первого физического параметра.
Идея настоящего изобретения состоит в том, чтобы обеспечить модуль лазерного датчика, который выполнен с возможностью обнаруживать или определять по меньшей мере два разных физических параметра посредством интерференции самосмешения, фокусируя лазерный луч в разных позициях. Такой модуль лазерного датчика может использоваться в качестве интегрированного модуля датчика, например, в мобильных устройствах. Модуль лазерного датчика может использоваться в качестве устройства ввода и, кроме того, в качестве датчика для обнаружения физических параметров в окружающей среде устройства мобильной связи. Один физический параметр в окружающей среде устройства мобильной связи может представлять собой, например, концентрацию частиц в воздухе (загрязнение воздуха, смог и т.д.).
Хотя изобретение было проиллюстрировано и подробно описано на чертежах и в предшествующем описании, такую иллюстрацию и описание следует считать иллюстративными, а не ограничивающими.
Из прочтения настоящего раскрытия специалистам в области техники будут очевидны другие модификации. Такие модификации могут включать в себя другие признаки, которые уже известны в области техники, и которые могут использоваться вместо или в дополнение к признакам, уже описанным в настоящем документе.
Вариации для раскрытых вариантов осуществления могут быть понятны и произведены специалистами в области техники на основе изучения чертежей, раскрытия и приложенной формулы изобретения. В формуле изобретения слово "содержащий" не исключает другие элементы или этапы, и использование единственного числа не исключает множество элементов или этапов. Тот лишь факт, что некоторые меры изложены во взаимно различных зависимых пунктах формулы изобретения, не указывает, что комбинация этих мер не может использоваться для достижения преимущества.
Любые ссылочные позиции в формуле изобретения не должны быть истолкованы как ограничение ее объема.
Список номеров для ссылок
100 Модуль лазерного датчика
110 Первый лазер
111 Второй лазер
120 Детектор
130 Электропривод
140 Контроллер
150 Первое оптическое устройство
152 Двоякопреломляющий элемент
155 Первая область фокусировки
156 Вторая область фокусировки
160 Второе оптическое устройство
170 Первое подвижное зеркало
180 Блок манипуляции
185 Второе оптическое устройство
190 Лазерная матрица
200 Устройство с человеко-машинным интерфейсом
250 Устройство мобильной связи
252 Основное устройство обработки
253 Основное запоминающее устройство
310 Этап испускания лазерного света
320 Этап фокусировки
330 Этап управления
340 Этап приема первого отраженного света
350 Этап определения первого сигнала интерференции самосмешения
360 Этап использования первого сигнала интерференции самосмешения
370 Этап определения второго сигнала интерференции самосмешения
380 Этап использования второго сигнала интерференции самосмешения
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛАЗЕРНЫЙ ДАТЧИК ДЛЯ ОБНАРУЖЕНИЯ ПЛОТНОСТИ ЧАСТИЦ | 2016 |
|
RU2716878C2 |
| ЛАЗЕРНЫЙ ДАТЧИК ДЛЯ ОПРЕДЕЛЕНИЯ РАЗМЕРОВ ЧАСТИЦ | 2016 |
|
RU2690083C1 |
| МОДУЛЬ ОПТИЧЕСКОГО ДАТЧИКА ЧАСТИЦ | 2017 |
|
RU2719573C1 |
| ЛАЗЕРНЫЙ ПРИБОР С РЕГУЛИРУЕМОЙ ПОЛЯРИЗАЦИЕЙ | 2014 |
|
RU2659749C2 |
| СПОСОБЫ И СИСТЕМЫ ОБНАРУЖЕНИЯ С ПОМОЩЬЮ ЛИДАРА (LiDAR) С ВОЛОКОННО-ОПТИЧЕСКОЙ МАТРИЦЕЙ | 2019 |
|
RU2762744C2 |
| Лазерное устройство для формирования 3D изображения | 2022 |
|
RU2807464C1 |
| ОПТИЧЕСКОЕ СЕНСОРНОЕ УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ, СКОРОСТИ И ИДЕНТИФИКАЦИИ ФОРМЫ И СТРУКТУРЫ ОБЪЕКТА | 2020 |
|
RU2750681C1 |
| Лидарная система и способ с когерентным детектированием | 2020 |
|
RU2792949C2 |
| ФЕМТОСЕКУНДНЫЙ ЛАЗЕР ВЫСОКОЙ МОЩНОСТИ С РЕГУЛИРУЕМОЙ ЧАСТОТОЙ ПОВТОРЕНИЯ | 2011 |
|
RU2589270C2 |
| ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ | 2021 |
|
RU2824434C2 |
Изобретение относится к области оптико-электронного приборостроения и касается модуля лазерного датчика. Модуль содержит лазер, детектор, электропривод и оптическое устройство. Модуль лазерного датчика выполнен с возможностью управлять расстоянием между модулем лазерного датчика и областью фокусировки и обеспечивать два режима модуля лазерного датчика. Причем в первом и втором режимах область фокусировки находится на разном расстоянии. Детектор выполнен с возможностью обнаруживать сигнал интерференции самосмешения оптической волны в лазерном резонаторе. Сигнал интерференции самосмешения в первом режиме используется для обнаружения движения объекта для управления посредством жестов для устройства с человеко-машинным интерфейсом. Сигнал интерференции самосмешения во втором режиме используется для определения плотности или размера частиц. Технический результат заключается в обеспечении возможности одновременного определения двух различных физических параметров посредством интерференции самосмешения. 6 н. и 11 з.п. ф-лы, 11 ил.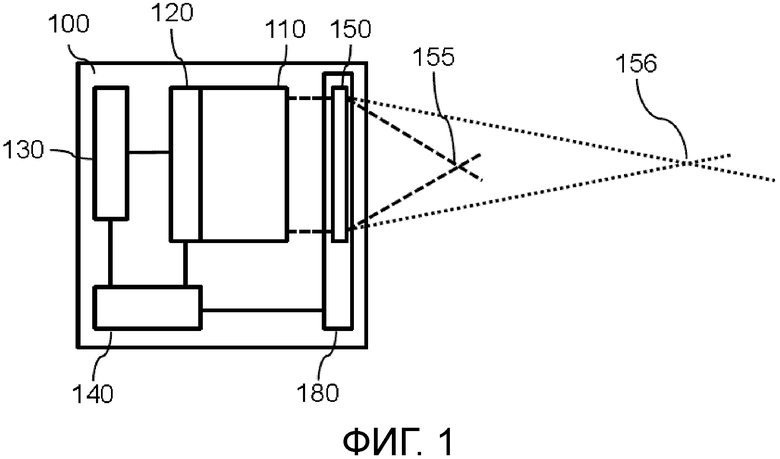
1. Модуль (100) лазерного датчика, модуль (100) лазерного датчика содержит по меньшей мере один первый лазер (110), по меньшей мере один первый детектор (120), по меньшей мере один электропривод (130) и по меньшей мере одно первое оптическое устройство (150), причем первый лазер (110) выполнен с возможностью испускать первый лазерный свет в ответ на сигналы, обеспеченные по меньшей мере одним электроприводом (130), причем первое оптическое устройство (150) выполнено с возможностью фокусировать первый лазерный свет в области (155, 156) фокусировки, причем модуль (100) лазерного датчика выполнен с возможностью управлять расстоянием между модулем (100) лазерного датчика и областью (155, 156) фокусировки, в результате чего имеется по меньшей мере первый режим и второй режим модуля (100) лазерного датчика, причем в первом режиме область (155) фокусировки находится на первом расстоянии и во втором режиме область (156) фокусировки находится на втором расстоянии, отличающемся от первого расстояния, причем по меньшей мере один первый детектор (120) выполнен с возможностью обнаруживать первый сигнал интерференции самосмешения оптической волны в первом лазерном резонаторе первого лазера (110), причем первый сигнал интерференции самосмешения вызван первым отраженным лазерным светом, повторно входящим в первый лазерный резонатор, причем первый отраженный лазерный свет принимается в первом режиме, причем первый сигнал интерференции самосмешения используется для определения первого физического параметра, отличающийся тем, что первый физический параметр используется для обнаружения движения объекта для управления посредством жестов для устройства с человеко-машинным интерфейсом, и причем модуль (100) лазерного датчика дополнительно выполнен с возможностью обнаруживать второй сигнал интерференции самосмешения, причем второй сигнал интерференции самосмешения вызван вторым отраженным лазерным светом, причем второй сигнал интерференции самосмешения определяется во втором режиме, причем второй сигнал интерференции самосмешения используется для определения второго физического параметра для обнаружения плотности частиц или размера частиц и причем второй физический параметр отличается от первого физического параметра.
2. Модуль (100) лазерного датчика по п. 1, причем модуль (100) лазерного датчика выполнен с возможностью обеспечивать квазиколлимированный луч первого лазерного света в первом режиме и причем модуль (100) лазерного датчика выполнен с возможностью фокусировать лазерный свет во втором режиме в пятне.
3. Модуль (100) лазерного датчика по любому из пп. 1 или 2, причем модуль (100) лазерного датчика содержит блок (180) манипуляции.
4. Модуль (100) лазерного датчика по п. 3, в котором блок (180) манипуляции выполнен с возможностью изменять характеристику первого лазерного света, в результате чего обеспечивается возможность первого и второго режимов.
5. Модуль (100) лазерного датчика по п. 3, в котором модуль (100) лазерного датчика содержит контроллер (140), причем контроллер (140) выполнен с возможностью обеспечивать управляющие сигналы для управления блоком (180) манипуляции, в результате чего первый лазерный свет фокусируется в первой области (155) фокусировки в первом режиме и в результате чего первый лазерный свет фокусируется во второй области (156) фокусировки во втором режиме.
6. Модуль (100) лазерного датчика по п. 3, причем модуль (100) лазерного датчика содержит по меньшей мере второй лазер (111), причем второй лазер (111) выполнен с возможностью испускать второй лазерный свет в ответ на сигналы, обеспеченные по меньшей мере одним электроприводом (130), причем первое оптическое расстояние между первым лазером (110) и первым оптическим устройством (150) отличается от второго оптического расстояния между вторым лазером (111) и первым оптическим устройством (150), причем блок (180) манипуляции выполнен с возможностью отображать первый лазерный свет посредством первого оптического устройства (150) на первую область (155) фокусировки в первом режиме и причем блок (180) манипуляции выполнен с возможностью фокусировать второй лазерный свет посредством первого оптического устройства (150) во второй области (156) фокусировки, отличающейся от первой области (155) фокусировки, во втором режиме.
7. Модуль (100) лазерного датчика по п. 5, в котором первое оптическое устройство (150) содержит блок (180) манипуляции, причем блок (180) манипуляции выполнен с возможностью обеспечивать по меньшей мере первое фокусное расстояние первого оптического устройства (150) и второе фокусного расстояния первого оптического устройства (150), отличающееся от первого фокусного расстояния, и причем контроллер (140) выполнен с возможностью обеспечивать управляющие сигналы для управления блоком (180) манипуляции, в результате чего первое оптическое устройство (150) обеспечивает первое фокусное расстояние в первом режиме и второе фокусное расстояние во втором режиме.
8. Модуль (100) лазерного датчика по п. 3, в котором блок (180) манипуляции выполнен с возможностью изменять оптическое расстояние между первым лазером (110) и первым оптическим устройством (150).
9. Модуль (100) лазерного датчика по любому из пп. 1 или 2, в котором первое оптическое устройство (150) содержит по меньшей мере один двоякопреломляющий элемент (152) для предоставления возможности первого режима и второго режима.
10. Модуль (100) лазерного датчика по п. 9, в котором модуль (100) лазерного датчика дополнительно содержит контроллер (140), причем первый лазер (110) выполнен с возможностью испускать первый лазерный свет с первой поляризацией и первый лазерный свет со второй поляризацией, отличающейся от первой поляризации, и в котором контроллер (140) выполнен с возможностью обеспечивать управляющие сигналы для управления первым лазером (110), в результате чего первый лазер (110) испускает первый лазерный свет с первой поляризацией в первом режиме и первый лазерный свет со второй поляризацией во втором режиме, причем упомянутый двоякопреломляющий элемент (152) выполнен с возможностью фокусировать первый лазерный свет с первой поляризацией в первой области (155) фокусировки и причем упомянутый двоякопреломляющий элемент (152) выполнен с возможностью фокусировать первый лазерный свет со второй поляризацией во второй области (156) фокусировки, отличающейся от первой области (155) фокусировки.
11. Модуль (100) лазерного датчика по любому из пп. 1 или 2, в котором первое оптическое устройство (150) выполнено с возможностью фокусировать первую часть первого лазерного света в первой области (155) фокусировки и вторую часть первого лазерного света во второй области (156) фокусировки.
12. Модуль (100) лазерного датчика по п. 1 или 2, причем модуль (100) лазерного датчика дополнительно содержит по меньшей мере второй лазер (111), причем второй лазер (111) выполнен с возможностью испускать второй лазерный свет в ответ на сигналы, обеспеченные по меньшей мере одним электроприводом (130), через первое оптическое устройство (150), причем первый лазерный свет содержит первую длину волны и второй лазерный свет содержит вторую длину волны, отличающуюся от первой длины волны, причем первое оптическое устройство (150) выполнено с возможностью фокусировать первый лазерный свет в первой области (155) фокусировки в первом режиме и причем первое оптическое устройство (150) выполнено с возможностью фокусировать второй лазерный свет во второй области (156) фокусировки, отличающейся от первой области (155) фокусировки, во втором режиме.
13. Устройство (200) с человеко-машинным интерфейсом, содержащее по меньшей мере один модуль (100) лазерного датчика по любому из предыдущих пунктов, причем первый режим модуля (100) лазерного датчика выполнен с возможностью обеспечивать по меньшей мере часть функций ввода, обеспечиваемых устройством (200) с человеко-машинным интерфейсом.
14. Устройство (250) мобильной связи, содержащее по меньшей мере одно устройство (200) с человеко-машинным интерфейсом по п. 13.
15. Способ обнаружения по меньшей мере двух физических параметров, способ содержит этапы, на которых:
- испускают первый лазерный свет посредством первого лазера (110),
- фокусируют первый лазерный свет в области (155, 156) фокусировки,
- управляют расстоянием между модулем лазерного датчика (100) и областью (155, 156) фокусировки, в результате чего имеется по меньшей мере первый режим и второй режим, причем в первом режиме область (155) фокусировки находится на первом расстоянии и во втором режиме область (156) фокусировки находится на втором расстоянии, отличающемся от первого расстояния,
- принимают первый отраженный лазерный свет в первом лазерном резонаторе первого лазера (110),
- определяют первый сигнал интерференции самосмешения оптической волны в первом лазерном резонаторе первого лазера (110), причем первый сигнал интерференции самосмешения вызван первым отраженным лазерным светом, повторно входящим в первый лазерный резонатор, первый отраженный лазерный свет принимается в первом лазерном резонаторе в первом режиме,
- используют первый сигнал интерференции самосмешения для определения первого физического параметра для обнаружения движения объекта для управления посредством жестов для устройства с человеко-машинным интерфейсом,
- определяют второй сигнал интерференции самосмешения во втором режиме, причем второй сигнал интерференции самосмешения вызван вторым отраженным лазерным светом,
- используют второй сигнал интерференции самосмешения для определения второго физического параметра для обнаружения плотности частиц или размера частиц, причем второй физический параметр отличается от первого физического параметра.
16. Запоминающее устройство, содержащее сохраненный на нем компьютерный программный продукт, содержащий кодовое средство, причем указанное запоминающее устройство содержится в модуле (100) лазерного датчика по любому из пп. 1-11, причем кодовое средство выполнено таким образом, что способ по п. 14 может быть исполнен посредством по меньшей мере одного устройства обработки, содержащегося в модуле (100) лазерного датчика по любому из пп. 1-11.
17. Запоминающее устройство, содержащее сохраненный на нем компьютерный программный продукт, содержащий кодовое средство, при этом запоминающее устройство содержится в устройстве, содержащем модуль (100) лазерного датчика по любому из пп. 1-11, причем кодовое средство выполнено таким образом, что способ по п. 14 может быть исполнен посредством по меньшей мере одного устройства обработки устройства, содержащего модуль (100) лазерного датчика.
| Seiichi Sudo и др | |||
| "Quick and easy measurement of particle size of Brownian particles and plankton in water using a self-mixing laser", OPTICS EXPRESS, т | |||
| Паровоз для отопления неспекающейся каменноугольной мелочью | 1916 |
|
SU14A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| ТЕПЛОВОЙ ДВИГАТЕЛЬ | 1924 |
|
SU1044A1 |
| WO 2002037411 A1, 10.05.2002 | |||
| US 6233045 B1, 15.05.2001 | |||
| US 2012004865 A1, 05.01.2012. | |||

