3
и состояния (и- носа) режущей кромки инструмента и ее положения в системе координат станка.
Расположение известного источника когерентного излучения в передней фокальной плоскости известной первой сферической линзы, за которой расположена первая цилиндрическая линза позволило получить на передней грани контролируемого режущего инструмента сфокусированный световой пучок в виде вытянутого эллипса, в котором концентрически расположено два соос- но распространяющихся пучка. Первый пучок распространяется вокруг оптической оси в угловом конусе и является когерентным излучением источника, за пределами этого конуса распространяется спонтанное излучение в угловом конусе 90° Такое рас- попожение элементов позволило получить освещение измерительной щели, образованной вершиной режущего клина
I706836
жательное зеркало, фокусное расстоя ние которого сопряжено условием фок сировки Гаусса с расстоянием между задней фокальной плоскостью известн го проекционного объектива и вогнут сферическим зеркалом, а также расстоянием между вогнутым сферическим зеркалом и известным приемником с з
Ю рядовой связью по ходу светового пу ка через светоделительный кубик0
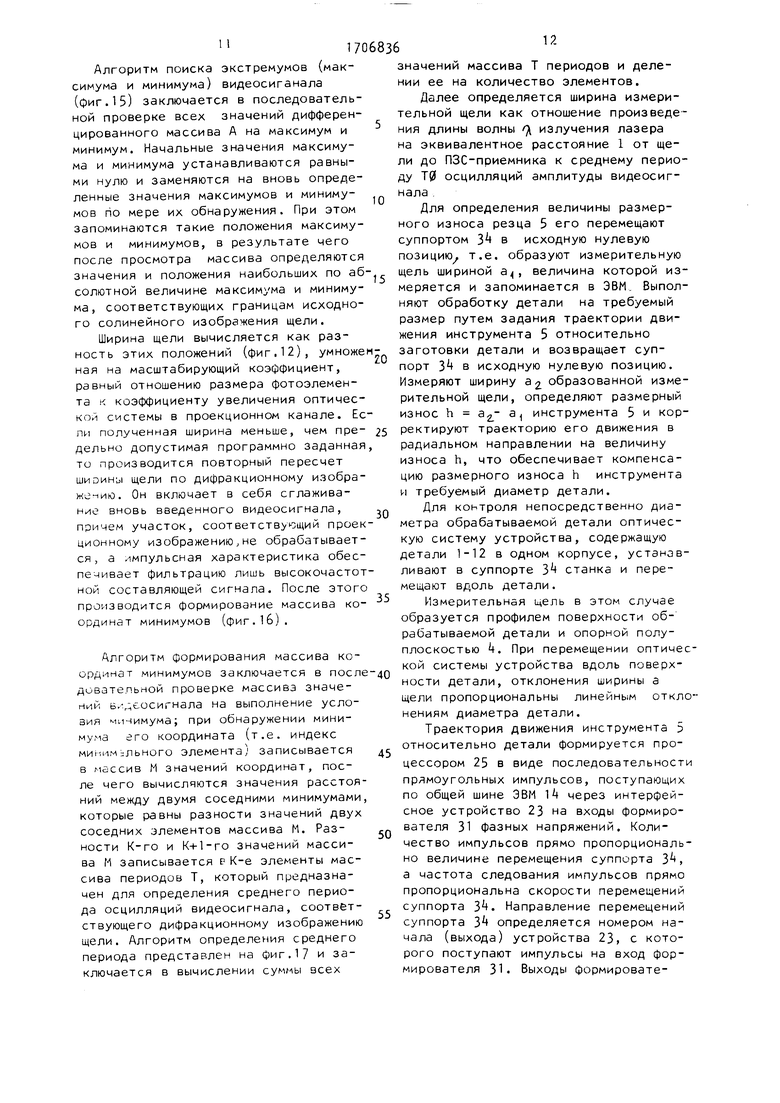
На фиг.1 изображена схема оптиче кой системы и ход лучей в саггиталь ной плоскости; на фиг.2 - схема опт
15 ческой системы и ход лучей в мериди альной плоскости; на фиг.З схема оптической системы Фурье-преобразов ния, его масштабирования и проециро вания солинейного изображения измер
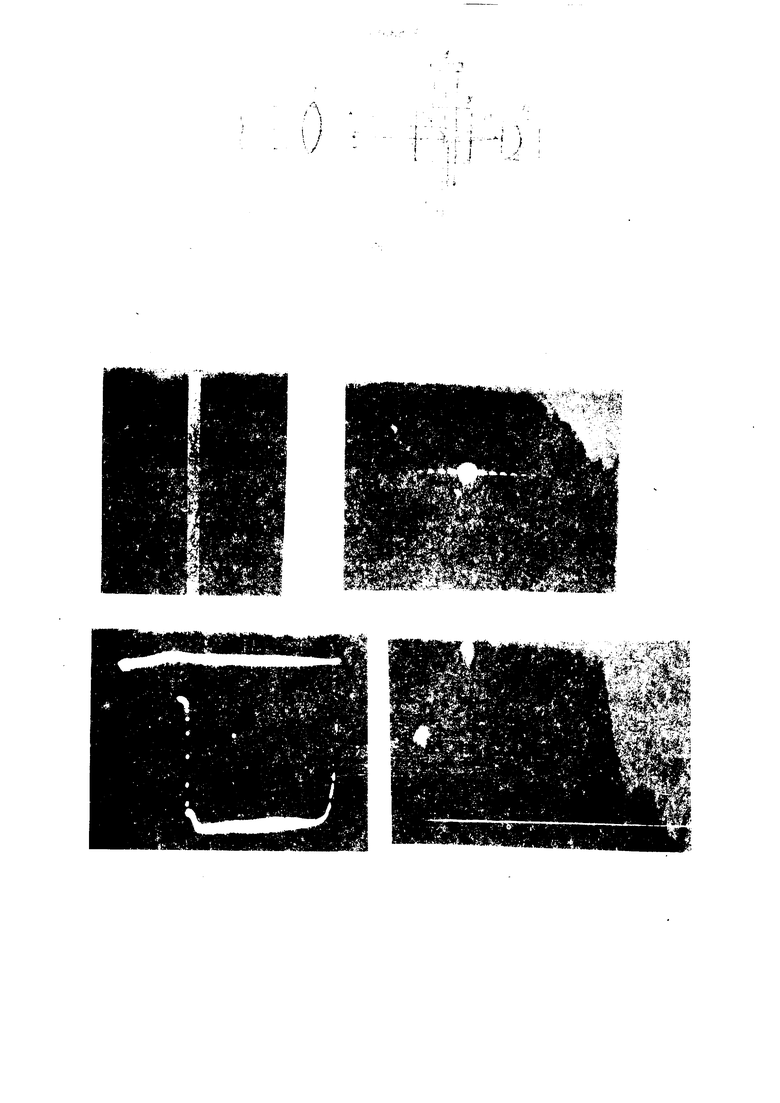
2Q тельной щели на приемник с зарядово связью; на фиг.k - фотография солинейного изображения измерительной щ ли; на фиг.5 фотография дифракцио ного изображения измерительной щели
инструмента и дополнительно введенной 25 на фиг.6 - фотография видеосигнала
06836
жательное зеркало, фокусное расстояние которого сопряжено условием фокусировки Гаусса с расстоянием между задней фокальной плоскостью известного проекционного объектива и вогнутым сферическим зеркалом, а также расстоянием между вогнутым сферическим зеркалом и известным приемником с заЮ рядовой связью по ходу светового пучка через светоделительный кубик0
На фиг.1 изображена схема оптической системы и ход лучей в саггиталь- ной плоскости; на фиг.2 - схема опти15 ческой системы и ход лучей в мериди- альной плоскости; на фиг.З схема оптической системы Фурье-преобразования, его масштабирования и проецирования солинейного изображения измери2Q тельной щели на приемник с зарядовой связью; на фиг.k - фотография солинейного изображения измерительной щели; на фиг.5 фотография дифракционного изображения измерительной щели;



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления процессом резания | 1987 |
|
SU1759604A1 |
| Устройство управления процессом резания | 1987 |
|
SU1759603A1 |
| Устройство для программного управления металлорежущими станками | 1985 |
|
SU1315236A1 |
| КВАРЦЕВЫЙ ГРАВИМЕТР | 2000 |
|
RU2171481C1 |
| ДВУХКООРДИНАТНЫЙ ФОТОЭЛЕКТРИЧЕСКИЙ ЦИФРОВОЙ АВТОКОЛЛИМАТОР | 2013 |
|
RU2535526C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ ИЗОБРАЖЕНИЯ МАРКИ В ЦИФРОВЫХ АВТОКОЛЛИМАТОРАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2773278C1 |
| СПОСОБ ИНТЕРФЕРОМЕТРИЧЕСКОГО ИЗМЕРЕНИЯ ОТКЛОНЕНИЯ ФОРМЫ ОПТИЧЕСКИХ ПОВЕРХНОСТЕЙ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2263279C2 |
| СПОСОБ РЕГИСТРАЦИИ ДИФФУЗНО ОТРАЖЕННОГО ИЛИ ДИФФУЗНО РАССЕЯННОГО ЛАЗЕРНОГО ИЗЛУЧЕНИЯ | 2011 |
|
RU2458361C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОКАЗАТЕЛЯ СВЕТОВОЗВРАЩЕНИЯ ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ | 2002 |
|
RU2202814C1 |
| ДВУХКАНАЛЬНЫЙ ОПТИКО-ЭЛЕКТРОННЫЙ АВТОКОЛЛИМАТОР | 2005 |
|
RU2304796C1 |

Изобретение относится к приборостроению и может быть использовано для компенсации погрешностей обработки деталей на металлорежущих станках с числовым программным управлением (ЧПУ) в условия/, гибкого автоматического производства (ГАП) Цель изобретения - повышение точности измерений и расширение функциональных возможносИзобретение относится к прибооо- строению для металлор ж/щих станков и может быть использовано в станкострое- нии для компенсации погрешностей обработки деталей на металлорежущих станках с числовым программным управлением (ЧПУ) в условиях гибкого автоматизированного производства ЛАП/, Цель изобретения - повышение точности измерений за счет введения источника когерентного излучения, обестей устройства. Устройство содержит аноморфотную оптическую систему, снаб- менчус источником когерентного излучения, расположенным в передней фокальной плоскости сферической колли- мирующей линзы, за которой установлена первая цилиндрическая линза. а Е. ее задней фокальной плоскости - дополнительная опорная полуплоскость, совпадающая с передней фокальной плоскостью второй цилиндрической линзы Вторая цилиндрическая линза установлена в передней схжальной плоскости проецирующего объектива, за которым рас- лололен (. у. тодрлителъный кубик, за перв ... Нг.ю которого по ходу отра- женн,.го путем излучения установлено плоское о т ражлтельное зеркало, а за второй г ранью по ходу прошедшего пучка излучения расположено сферическое вогну ое отражательное зеркало, фо- куспо- рг . . -T,:iHne которого сопряжено условием ,;,.. .(ировки Гаусса с расстия- нием до задн. и фокальной плоскости объектива и расстоянием от приеми; . с зарядовой связью 17 ил печивающего формирование дифракционного изображения специальной измерительной щели и расширение функциональных возможностей устройства за счет того, что расширяется диапазон диаметров контролируемых деталей за счет введения опорной полуплоскости, статически расположенной в оптн-с - кой системе, а также за счет .- зования устройства как для ю размеров обр; -ттызаемых дет.-(Л о о :оо со О /
опорной полуплоскостью и когерентной составляющими пучка излучения лазера, и реализовать в единой оптической аноморфотной системе проекционный и дифракционный способы измерений. Анаморфотная оптическая система получена путем расположения второй цилиндрической линзы в передней фокальной плоскости известного проекционного объектива (линзы), за которым также расположен дополнительно введенный светоделительный кубик для разделения пучка излучения в двух ортогональных направлениях На пути распространения п.рвого пучка за первой гранью свето- делительного кубика расположено дополнительно введенное плоское отражатель- е зеркало ортогонально оси падающего а него пучка для его проецирования
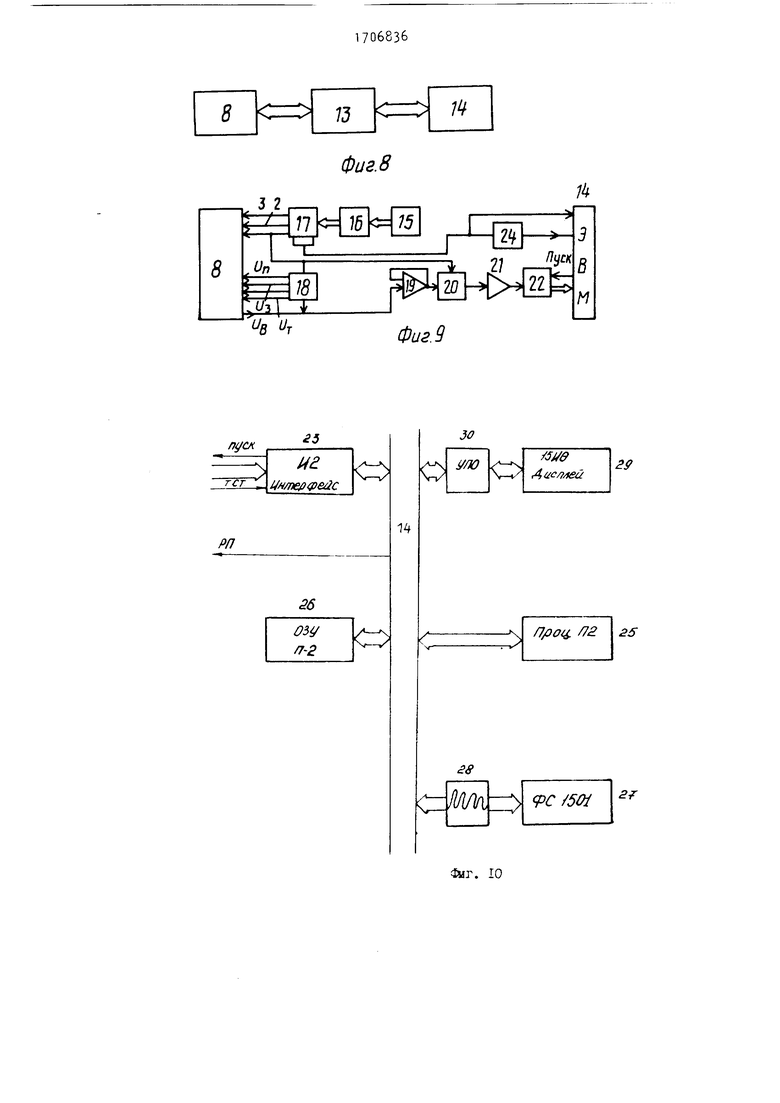
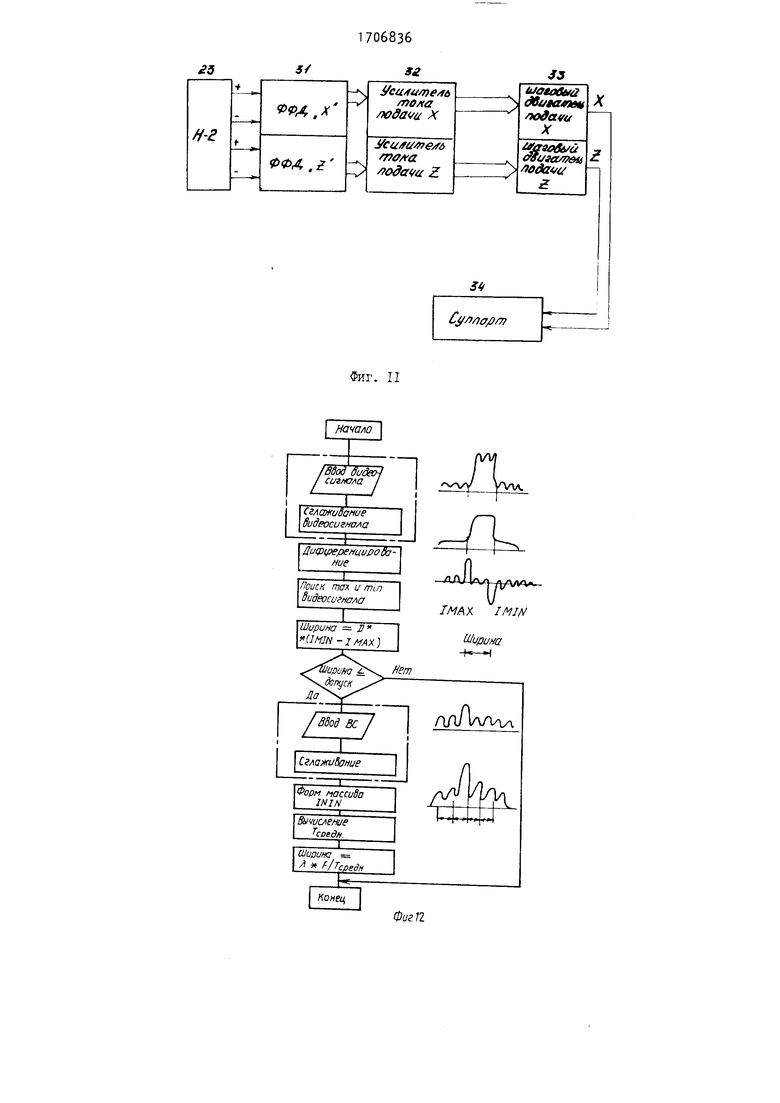
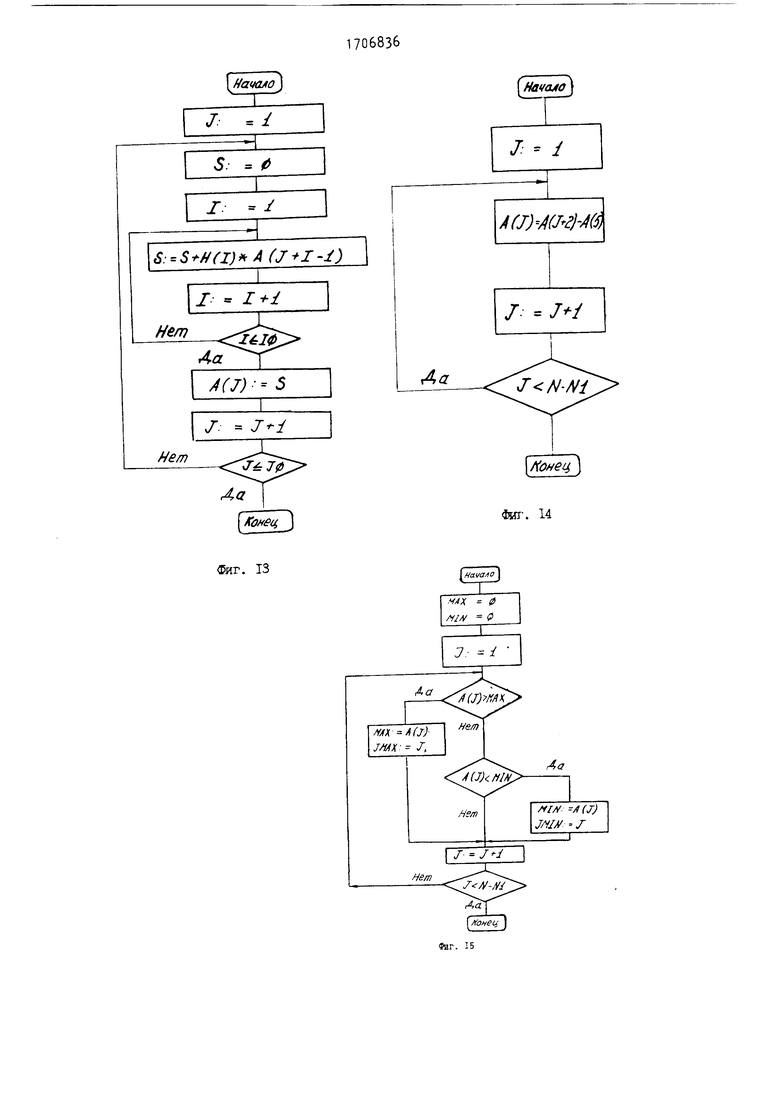
ПЗС-приемника при фотометрировании солинейного изображения измерительной щели; на фиг.7 фотография видеосигнала ПЗС-приемника при фотометрировании дифракционного изображения изме рительной щели; на фиг.8 - функциональная блок-схема соединения ПЗС- приемника с системой ЧПУ станка; на фиг.9 функциональная блок-схема блока формирования видеосигнала ПЗС- приемника; на фиг.10 - функциональная блок-схема соединения устройств ЭВМ, на фиг.11 - функциональная блок-схема подключения процессора системы ЧПУ к приводам станка; на фиг.12 - блок-схе ма алгоритма вычисления ширины измери тельной щели; на фиг.13 блок-схема алгоритма сглаживания видеосигнала ПЗС-приемника; на фиг.1 - блок-схема алгоритма дифференцирования видеосиг50
--. Кратном ходе лучей через светоде- 5-.тельный кубик на известный приемник нала; на фиг. 15 блок-схема алгорит- . зарядовой связью. Причем расстояние с.т измерительной щели по ходу светово- гс пучка до известного проекционного объектива сопряжено условием фокусировки Гаусса с расстоянием от последнего по ходу светового пучка через светоделительный кубик и плоское отражательное зеркало до известного приемника с зарядовой связью. Кроме того, на пути распространения второго светового пучка за светоделительным кубиком расположено дополнительно
55
ма поиска экстремальных (max и min) точек видеосигнала; на фиг 16 - блок- схема алгоритма формирования массива координат минимумов видеосигнала; на фиг. 17 - блок-схема алгоритма вычисле ния среднего периода Т0 .
Устройство компенсации погрешностей обработки на металлорежущих станках содержит последовательно расположенные вдоль оптической оси источник когерентного излучения - лазер 1 , установленный в передней плоскости коллимирующей сферической
зведенное сфер чзское вогнутое отра0
5
0
ПЗС-приемника при фотометрировании солинейного изображения измерительной щели; на фиг.7 фотография видеосигнала ПЗС-приемника при фотометрировании дифракционного изображения измерительной щели; на фиг.8 - функциональная блок-схема соединения ПЗС- приемника с системой ЧПУ станка; на фиг.9 функциональная блок-схема блока формирования видеосигнала ПЗС- приемника; на фиг.10 - функциональная блок-схема соединения устройств ЭВМ, на фиг.11 - функциональная блок-схема подключения процессора системы ЧПУ к приводам станка; на фиг.12 - блок-схема алгоритма вычисления ширины измерительной щели; на фиг.13 блок-схема алгоритма сглаживания видеосигнала ПЗС-приемника; на фиг.1 - блок-схема алгоритма дифференцирования видеосигнала; на фиг. 15 блок-схема алгорит-
0
нала; на фиг. 15 блок-схема алгорит-
5
ма поиска экстремальных (max и min) точек видеосигнала; на фиг 16 - блок- схема алгоритма формирования массива координат минимумов видеосигнала; на фиг. 17 - блок-схема алгоритма вычисления среднего периода Т0 .
Устройство компенсации погрешностей обработки на металлорежущих станках содержит последовательно расположенные вдоль оптической оси источник когерентного излучения - лазер 1 , установленный в передней плоскости коллимирующей сферической
линзы 2, за которой расположена первая цилиндрическая линза 3. В задней фокальной плоскости линзы 3 установлена опорная полуплоскость 4, с которой образует оптически прозрачную щель контролируемый резец (деталь) 5, причем щель ориентирована вдоль большей оси эллипса сфокусированного пучка и совпадает с передней фокальной плоскостью второй цилиндрической линзы 6, расположенной в передней фокальной плоскости проецирующего объектива (линзы) 7- Линза 7 предназначена для формирования солинейного изображения измерительно щели на однокоординатом приемнике 8 с зарядовой связью (ПЗС-приемник),который расположен за линзой 7 на расстоянии, сопряженном условием фокусировки Гаусса с ее фокусным расстоянием и расстоянием от линзы 7 до измерительной щели. Для уменьшения габаритных размеров оптической системы за проекционной линзой расположен светоделительный кубик 9, обеспечивающий разделение падающего на него светового потока в двух взаимно ортгональных направлениях. На пути распространения первого светового пучка расположено плоское отражательное зеркало 10 для формирования совместно с линзой 7 солинейного изображения измерительной щели на фоточувствительном слое приемника 8 с зарядовой связью. При этом расстояние от линзы 7 до приемника 5 по ходу светового пучка через светоделительный кубик 9 и отражения от зеркала 10 удовлетворяет оговоренному условию фокусировку Гаусса. На пути распространения второго светового пучка 11 за счетоделительным кубиком 9 расположено сферическое вогнутое отражательное зеркало 12 для проецирования дифракционного изображения измерителной щели на фоточувствительный слой приемника 8 с зарядовой связью. При этом расстояние от задней фокальной плоскости проецирующей линзы 7 до зеркала 12 сопряжено условием фокусировки Гаусса с его фокусным расстоянием и расстоянием от зеркала 12 по ходу светового пучка через светоделительный кубик 9 до приемника 8 с зарядовой связью.
Выход приемника 8 с зарядовой связью подключен к блоку 13 формирования видеосигнала, соединенного, в
0
5
0
5
0
5
0
5
0
5
свою очередь, с процессором ЭВМ 14. Блок 13 Формирования видеосигнала содержит генератор 15 тактовой частоты развертки видеосигнала во времени. Выход генератора 15 тактовой частоты соединен с входом коммутатора 16, который предназначен для формирования прямоугольных импульсов запуска/сброса формирователя 17 фазных напряжений, вход которого соединен с выходом коммутатора 16. Первый, второй и третий выходы формирователя 17 фазных напряжений соответственно соединены с первым, вторым и третьим фазными входами приемника 8 с зарядовой связью. Кроме того, первый выход формирователя 17 фазных напряжений подключен также и к входу формирователя 18 опорных напряжений, четыре выхода которого соединены соответственно с четырьмя входами (входы питания, затвора, подложки и корпуса) приемника 8 с зарядовой связью, сигнальный выход которого соединен с пятым выходом формирователя 18 опорных напряжений и входом операционного усилителя (повторителя) 19 для повышения мощности видеосигнала. Выход повторителя 19 подключен к первому входу блока 20 фильтратов второй вход которого соединен с первым выходом формирователя 17 фазных напряжений. Выход блока 20 фильтров подключен через усилитель 21 напряжения к сигнальному (аналоговому) входу ана- лого-цифрового преобразователя (АЦП) 22, цифровые выходы которого соединены че|5ез интерфейсное устройство 23 с общей шиной 14. Вход запуска АЦП 22 соединен с выходным регистром интерфейсного устройства 23. Начальный сигнал общей шиной ЭВМ 14 соединен через счетный триггер 24 с управляющим входом формирователя 17 фазных напряжений, который подключен к входу Требования прерывания интерфейсного устройства 23. К общей шине ЭВМ 14 подключен процессор 25, оперативное запоминающее устройство 26, фотосчитыватель 27 через интерфейсное устройство 28, алфавитно- цифровой дисплей 29 через интерфейсное устройство 30. Кроме того, выход устройства 23 через формирователь 31 фазных напряжений и усилители тока 32 подключен к шаговым двигателям 33 суппорта 3.
Работа устройства компенсации погрешностей обработки на металлорежущих станках заключается в следующем.
Выходной пучок излучения лазера 1 коллимируется линзой 2 и распространяется после нее в виде параллельного пучка, содержащего когерентное излучение в центральной области вокруг оси пучка, генерируемое резонатором лазера, и некогерентное спонтанное (люминесцентное) излучение в периферийной области пучка вокруг когерентной составляющей, генерируемое активным элементом лазера 1. За линзой 2 расположена первая цилиндрическая линза 3, которая предназначена для фокусировки падающего г а нее пучка излучения лишь в одном направлении. Поэтому в задней фокальной плоскости линзы 3 сфокусированный пучок имеет форму эллипса, большая ось которого совпадает с направлением фокусировки пучка цилиндрической линзой 3. Сфокусированный линзой 3 пучок освещает измерительную щель, образованную дополнительной опорной полуплоскостью и вершиной режущего клина инструмента Ь, причем большая ось эллипса освещающего пучка совпадает с направлением радиальной подачи инструмента 5, а опорная полуплоскость установлена статически в области когерентной составляющей освещающего ее пучка излучения. Таким образом, достигается освещение измерительной щели узким, но длинным пятном : tfii TOBO- го пучка излучения. Проецирующей линзой 7, светоделительным кубиком 9 и плоским отражательным зеркалом 10 формируется солинейное изображение измерительной щели на ПЗС-приемнике 8 Одновременно проецирующей линзой 7, светоделительным кубиком 9 и вогнутым отражательным зеркалом 12 формируется дифракционное изображение измерительной щели на ПЗС-приемнике 8. При формировании солинейног. изображения измерительной щели на ПЗС-приемнике 8 освещенная грань статически установленной опорной полуплоскости А проецируется на нескольго первых фотоэлементов чувствительного слоя приемника 8, а вершина подвижного режущего инструмента 5 - на остальную часть чувствительного слоя. Далее, при формировании дифракционного изображения щели на ПЗС-приемнике 8, оптическая система отюстирована
5
0
5
5
0
5
0
5
путем углового перекоса зеркала 12 так, что на чувствительный слой ПЗС- приемника 8 не попадает нулевой дифракционный максимум, т.е. он смещен за пределы чувствительного слоя. Таким образом, на ПЗС-приемник 8 одновременно проецируется анаморфотной оптической системой два оптических изобрамения измерительной щели - солинейное изображение и дальняя область дифракционного изображения, фотографии которых приведены на фиг.k и 5 соответственно. Для уменьшения угловой расходимости светового пучка в этих изображениях,а также повышения их яркости (освещенности),между измерительной щелью и проецирующей линзой 7 расположена вторая цилиндрическая линза 6, причем линза 6 расположена в передней фокальной плоскости линзы 7, а передняя фокальная плоскость линзы 6 совмещена с плоскостью расположения измерительной щели, т.е. плоскостью расположения передней (верхней) грани режущего инструмента. Дифракционное изображение измерительной щели представляет собой эквидистантно расположенные чередующиеся максимумы и минимумы светового потока, проявляющиеся в регулярной осци- ляции интенсивности светового потока в дифракционном изображении. Период осциляции видеосигнала обратно пропорционален ширине измерительной щели и может быть аппаратурою зарегистрирован по видеосигналу ПЗС-прием- ника (фиг./) для щелей шириной не более 600-800 мкм, освещенных лишь когерентной составляющей падающего на щель светового потока. Солинейное изображение измерительной щели представляет собой ее теневую геометрическую проекцию, освещенную лишь в пределах ширины щели и визуально наблюдаемую как яркую световую линию фотометрируемую ПЗС-приемником 8, выходной видеосигнал которого (фиг.б; повторяет по амплитуде распределение светового потока в соли- нейном изображении измерительной щели .
Выходной видеосигнал ПЗС-приемни- ка 8 формируется блоком 13 и представляет собой периодически чередующиеся через равные тактовые интервалы импульсы огибающей, совпадающей по форме с пространственным распределением интенсивност:-; светового по9
тока в изображении на светочувствительном слое ПЗС-приемнике 8. Для формирования видеосигнала в блоке 13 имеется генератор 15 тактовой частоты, формирующий на выходе периодически повторяющиеся прямоугольные импульсы напряжения,поступающие На вход коммутатора 16. Коммутатор 16 имеет шесть параллельных выходов, подключенных ко входам формирователя 17 фазных напряжений, по каждому из которых коммутатором 16 последовательно распределяются входные импульсы. Формирователем 17 формируются фазные напряжения в виде прямоугольных импульсов, поступающих из первого, второго и третьего его выходов на соответствующие три фазные входа приемника 8 с зарядовой связью Длительность импульсов каждого из фазных напряжений равна временному интервалу между передними фронтами двух импульсов, поступающих из соответствующего выхода коммутатора 16. Таким образом, формируется бегущая во времени волна электрического напряжения по светочувствительному слою приемника 8, которая осуществляет перенос накопившегося заряда под действием падающего на приемник 8 светового потока. Заряд поступает на выходной регистр приемника 8.
Для повышения квантовой эффективности выхода электронов из светочувствительного слоя приемника 8 к его подложке и затвору выходного регистра прикладываются соответствующие электрические напряжения, формируемые формирователем 18 опорных напряжений. Выходной видеосигнал приемника 8 поступает через операционный усилитель 19 (для повышения нагрузочной способности) на вход блока 20 фильтров. В блоке 20 фильтров осуществляется высокочастотная фильтрация видеосигнала из импульсной формы в сглаженную огибающую, которая повторяет по форме распределение интенсивности светового поля на светочувствительном слое приемника 8. Далее выходной видеосигнал блока 20 фильтров усиливается по напряжению усилителем 21 для повышения амплитуды видеосигнала, а также приведения его в диапазон входных напряжений аналогового входа АЦП 22. Запуск АЦП 22 осуществляется программно процессором 25 ЭВМ И через выходной
1706836
0
5
0
5
0
5
0
5
0
5
регистр интерфейсног ,ст . j-;-. 2j- обмена данными. С цифровых зыходое АЦП 22 поступает рзоичпн.- цифровой код входного зидеосиг-нсла на Бледные регистры интерфейсного . тза 23, с которого считывается программно процессором 25 и записыь. а виде массива чисел в опербти,ьш. запоминающее устройство 26. Далее осуществляется цифровая oopaociKd видеосигнала (т.е. записанного массива чисел, значения которых гфогюриио- нальны амплитудам соответствующих . Т- счетов видеосигнала) в г, ;х./г спмммом режиме по алгоритму, приьедыр- му на фиг 12. Сущность обработки видеосигнала по такому алгоритму свидится к выполнению ряда процедур, представ- лемных в виде отдельных алгоритмов на последующих фпг.. На первом этапе обработки введенного видеосигнала осуществляется его сглаживание для подавления случайных флуктуации, вызванных загрязнением деталей оптической системы, а также попавшей стружкой от обрабатываемой детали в поле зрения оптической системы (см. алгоритм ча фиг. 13/.
Алгоритм сглаживания видеосигнала, представленный на фиг.13, заключается в том, что значения отсчетов видеосигнала, соответствующие элементам А (I) массиза А умн:;.ают-:я на со от- ветствующие весовые коэффициенты Н (1) и суммируются. Результат суммирования записывается в ячейку А (I,) , после чего индекс i уплачивается на единицу и процесс повторяется до достижения массива А. Б результате, сглаживания ь я1, с-::, соответствующих знаиен инм не ; дНч го массива, записываются значения сглаженного видеосигнала, т... свертки исходного видеосигнала .. имг./льсной характеристикой цифровог Фпльтрз, представленной массивом Н еаы, .
Алгоритм дифференцирования ,ф1-,г. необходим для выделения переднего и заднего фронтов видеосигнала, соответствующего проекционному еолинойно- му изображению щели. Он заключается в вычислении разности Т+2- и 1-го элементов массива А сгл.зжс гм-;.:го видеосигнала, при - см резуяь..гг записывается в 1-ю я-.|..:..-, а i-ч ,;.:.. к увеличивается на C;;i . чУ. после иег-о прг.- цесс продолжается дс / остижеш ; ::ин- ца .массива.
Алгоритм поиска экстремумов (максимума и минимума) видеосиганала (фиг.15) заключается в последовательной проверке всех значений дифференцированного массива А на максимум и минимум. Начальные значения максимума и минимума устанавливаются равными нулю и заменяются на вновь определенные значения максимумов и минимумов по мере их обнаружения. При этом запоминаются такие положения максимумов и минимумов, в результате чего после просмотра массива определяются значения и положения наибольших по абсолютной величине максимума и минимума, соответствующих границам исходного солинейного изображения щели.
Ширина щели вычисляется как разность этих положений (фиг.12), ная на масштабирующий коэффициент, равный отношению размера фотоэлемента к коэффициенту увеличения оптической системы в проекционном канале. Если полученная ширина меньше, чем пре- дельно допустимая программно заданная то производится повторный пересчет ширины щели по дифракционному изобра- жечию. Он включает в себя сглаживание вновь введенного видеосигнала, причем участок, соответствующий проекционному изображению,не обрабатывается, а импульсная характеристика обеспечивает фильтрацию лишь высокочастотной составляющей сигнала. После этого производится формирование массива - ординат минимумов (фиг.16) .
умножеко
Алгоритм формирования массива координат минимумов заключается в посл довательной проверке массива значений видеосигнала на выполнение условия минимума; при обнаружении минимума его координата (т.е. индекс минимального элемента) записывается в массив М значений координат, после чего вычисляются значения расстояний между двумя соседними минимумами которые равны разности значений двух соседних элементов массива М. Разности К-го и К+1-го значений массива М записывается вК-е элементы массива периодов Т, который предназначен для определения среднего периода осцилляции видеосигнала, соответствующего дифракционному изображению щели. Алгоритм определения среднего периода представлен на фиг.1 и заключается в вычислении суммы всех
значений массива Т периодов и делении ее на количество элементов.
Далее определяется ширина измерительной щели как отношение произведения длины волны излучения лазера на эквивалентное расстояние 1 от щели до ПЗС-приемника к среднему периоду Т0 осцилляции амплитуды видеоси - нала .
Для определения величины размерного износа резца 5 его перемещают суппортом 3 в исходную нулевую позицию,, т.е. образуют измерительную щель шириной а,|, величина которой измеряется и запоминается в ЭВМ. Выполняют обработку детали на требуемый размер путем задания траектории движения инструмента 5 относительно заготовки детали и возвращает суппорт 3 в исходную нулевую позицию. Измеряют ширину а2 образованной измерительной щели, определяют размерный
25,„
45
до50
55
а, инструмента 5 и коризнос h ректируют траекторию его движения в радиальном направлении на величину износа h, что обеспечивает компенсацию размерного износа h инструмента и требуемый диаметр детали.
Для контроля непосредственно диаметра обрабатываемой детали оптическую систему устройства, содержащую детали 1-12 в одном корпусе, устанавливают в суппорте 3 станка и перемещают вдоль детали.
Измерительная цель в этом случае образуется профилем поверхности обрабатываемой детали и опорной полуплоскостью k. При перемещении оптической системы устройства вдоль поверхности детали, отклонения ширины а щели пропорциональны линейным отклонениям диаметра детали.
Траектория движения инструмента 5 относительно детали формируется процессором 25 в виде последовательности прямоугольных импульсов, поступающих по общей шине ЭВМ 14 через интерфейсное устройство 23 на входы формирователя 31 фазных напряжений. Количество импульсов прямо пропорционально величине перемещения суппорта 3, а частота следования импульсов прямо пропорциональна скорости перемещений суппорта 3. Направление перемещений суппорта 3 определяется номером начала (выхода) устройства 23, с которого поступают импульсы на вход формирователя 31. Выходы формирователя 31 подключены через усилители 32 тока к входам шаговых двигателей 33, соединенных через механическое зацепление с суппортом 3.
Формула изобретения Устройство компенсации погрешностей обработки на металлорежущих станках, содержащее последовательно соединенные фотоэлектрический преобразователь, включающий источник излучения и проецирующий объектив, в плоскости фокусировки которого установлено фотоприемное устройство, включающее однокоординатныйприемник сзарядо- вой связью, подключенный через блок формирования видеосигнала к входу аналого-цифрового преобразователя, выход которого соединен через интерфейсное устройство с процессором системы числового программного управления станка, причем объектив расположен между измеряемой деталью и приемником с зарядовой связью, а фокусное расстояние объектива сопряжено условием фокусировки Гаусса с расстоянием от объектива до детали и расстоянием от объектива до приемника с зарядовой связью, отличающееся тем, что, с целью повышения точности измерений и расширения функциональных возможностей устройства, оптическая система выполнена анаморфотной и снабжена источником когерентного излучения, расположенным в передней фокальФиг. I
Фиг. 2
5
0
5
0
5
ной плоскости сферической коллимирую- щей линзы, за которой установлена первая цилиндрическая линза, в задней фокальной плоскости которой расположена дополнительная опорная полуплоскость для образования с поверхностью исследуемого образца оптически прозрачной щели, совпадающая с передней фокальной плоскостью второй цилиндрической линзы, установленной в передней фокальной плоскости проецирующего объектива, между объективом и приемником с зарядовой связью установлен светоделительный кубик, за первой гранью которого по ходу отраженного пучка излучения расположено плоское отражательное зеркало, а за второй гранью по ходу прошедшего пучка излучения расположено сферическое вогнутое отражательное зеркало, фокусное расстояние которого сопряжено условием фокусировки Гаусса с расстоянием до задней фокальной плоскости проецирующего объектива и расстоянием от приемника с зарядовой связью, причем расстояние от проецирующего обектива по ходу светового пучка через первую грань светодели- тельного кубика и плоского отражательного зеркала до приемника с зарядовой связью равно расстоянию от объектива по ходу светового пучка через вторую грань светоделительного кубика и сферическое зеркало до приемника с зарядовой связью.
Фиг.8
3 2
пуск
/4
Фиг. 10
: о
ll
f
gs
I
I
Начало
S: Ф
I: /
S: 5 +H(I) A (J+I-J)
I I+i
Hem
Hem
КонецЛ
Фиг. 13
Havauio
Фит . 14
t/a z/iff
К
НС) 7
Aa
Фиг. 16
Начало
ф
I: /
T0 T0+T(I) т
(/gwagj
Фиг. 17
| Runckvist: V, In.dcrcct size control in NC-turniib; r liU Annals, 1982 Mnnufactnriu;: L echn: i ;.;y | |||
| Vol | |||
| Способ очистки нефти и нефтяных продуктов и уничтожения их флюоресценции | 1921 |
|
SU31A1 |
