Изобретение относится к ракетной технике, в частности к управлению ракетными двигателями твердого топлива.
Известен способ управления твердотопливной регулируемой двигательной установкой (ТРДУ), описанный в открытом источнике (Абугов Д.И., Бобылев В.М. Теория и расчет ракетных двигателей твердого топлива, стр. 11-14, 60-71, 73-77, 176-188) и принятый за прототип. ТРДУ устанавливается на верхние ступени ракетных комплексов. Конструктивно представляет собой твердотопливный ракетный двигатель с топливным зарядом с высокой чувствительностью скорости горения к изменению давления в камере сгорания. Регулирование тяги осуществляется изменением суммарной площади критического сечения сопел, посредством органа управления (электромеханического привода), на который подается управляющий сигнал системы стабилизации давления (входящей в состав системы управления ТРДУ). Недостатком подобных двигательных установок является высокая зависимость скорости горения топлива от его температуры. Чем выше температура топливного заряда, тем выше скорость горения, и наоборот.
Задачей заявленного способа является возможность использовать ТРДУ при температурах топливного заряда, отличных от расчетных.
Поставленная задача выполняется в способе управления твердотопливной регулируемой двигательной установкой в условиях параметрической неопределенности, заключающемся в изменении площади критического сечения сопел путем подачи на привод сопел управляющего сигнала системы стабилизации давления, формируемого в зависимости от измеренного давления в двигателе, согласно изобретению, требуемое качество управления в условиях, когда температура топливного заряда заранее неизвестна и не совпадает с величиной, используемой при настройке системы стабилизации давления, обеспечивают с помощью корректирующего сигнала, формируемого в системе стабилизации давления по определенному алгоритму, при этом величина сигнала уставки, используемая для формирования сигнала управления рассчитывается с учетом корректирующего сигнала.
При большом отклонении температуры топливного заряда от величины, используемой для моделирования внутрикамерных процессов при настройке системы стабилизации давления (ССД) (входящей в состав системы управления ТРДУ), возможны значительные отклонения реальной скорости горения от расчетной величины, что приводит к ухудшению качества управления реального объекта. Наибольшее влияние на качество управления разброс температуры оказывает на участках, для которых характерны наиболее высокие градиенты давления, например, на участке включения двигательной установки (ВДУ). Так как измерение температуры топлива и подстройка ССД перед запуском двигателя невозможны, а начальная площадь сечения сопел на момент ВДУ конструктивно фиксирована, в процессе зажигания возникают генерации, негативно сказывающиеся на функционировании изделия, оснащенного ТРДУ.
Принципиальная схема ТРДУ изображена на фиг. 1. Система стабилизации давления (ССД) (1) формирует сигнал управления, который подается на орган управления (ОУ) (2). Изменение площади критического сечения сопла осуществляется изменением положения вала ОУ - электромеханического привода (ЭМП). Таким образом, имеется зависимость давления в камере сгорания (КС) (3) и тяги ТРДУ от положения валов электродвигателей органов управления.
ТРДУ имеет несколько уровней постоянства давления в КС и, соответственно, тяги - так называемых стационарных участков (фиг. 2).
Также отдельно выделяется участок включения двигательной установки (ВДУ) - участок от зажигания топлива до установления в камере сгорания требуемого давления Р1.
Уставка ОУ - это заранее рассчитанное положение органа управления, которое соответствует требуемому для конкретной величины давления в КС расходу продуктов сгорания через сопло. Для каждого из стационарных участков при проектировании ССД рассчитано свое значение уставок, которое не изменяется в течение функционирования двигателя.
Относительно своей требуемой (программной) величины давление в КС ТРДУ регулируется с помощью ССД, которая работает по отклонению фактически измеренного в КС давления от требуемой величины и имеет ограничения на свои параметры, обусловленные областью устойчивости системы. К ССД предъявляются требования к качеству управления ТРДУ: обеспечение высокого быстродействия и минимального перерегулирования по давлению при смене режимов тяги и при включении двигательной установки. Выполнение таких требований усложняется наличием ряда факторов, из которых выделим два:
- наличие задержек различной природы между измерением давления в камере сгорания и реакцией органов управления на измеренную величину;
- необходимость осуществлять функционирование ТРДУ при любой температуре твердого топлива из некоторого диапазона.
При проектировании ракетных комплексов с ТРДУ стараются минимизировать имеющиеся задержки, а для обеспечения работы двигателя при различной температуре ТРДУ подвергается продолжительному термостатированию в специальных контейнерах. Если обеспечить это невозможно, и от ССД требуется осуществлять регулирование в условиях параметрической неопределенности ТРДУ, традиционный подход к проектированию ССД не позволяет достичь требуемого качества управления.
Система стабилизации давления основана на пропорционально-интегрально-дифференцирующем (ПИД) регуляторе, имеющем пропорциональную, интегральную и дифференцирующую составляющие регулирования давления. Дифференцирующая составляющая регулятора реализована как фильтр Wфил, формирующий фазовое опережение сигнала измеренного давления. Сигнал ССД определяют следующим образом:

где Uссд - сигнал ССД, подаваемый на орган управления,
а0 - пропорциональный коэффициент регулятора ССД,
Wф, - передаточная функция фильтра, формирующего фазовое опережение измеренного давления,
Р - измеренное в КС давление,
Р0 - требуемая величина давления,
a1 - интегральный коэффициент регулятора ССД,
Uуст - сигнал уставки, соответствующий требуемому положению рулей для обеспечения текущего режима тяги,
s - оператор Лапласа.
Значения Uyст выбираются для каждого стационарного участка давления и являются постоянными на нем. Пропорциональный коэффициент а0 меняется в функции свободного объема КС, а коэффициент a1 выбирается постоянным для всего времени работы ТРДУ.
Передаточная функция фильтра, формирующего фазовое опережение измерения давления, имеет вид:
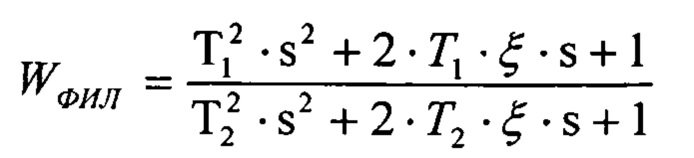
где Т1, Т2 - постоянные времени фильтра,
ξ - декремент затухания,
s - оператор Лапласа.
На фиг. 3 изображены переходные процессы в камере сгорания по давлению во время зажигания топливного заряда и выхода на первый стационарный режим - процесс ВДУ. Графики получены при моделировании трех режимов с заданием различной температуры топлива: -40°С для пониженного, 0°С для номинального, +40°С для повышенного. При этом стабилизация давления в КС осуществляется ССД, настроенной на функционирование ТРДУ при температуре топлива +40°С.
Учитывая строгое ограничение на максимальную величину давления в КС, при выборе начальных уставок ОУ приоритет отдается величине, позволяющей с минимальным перерегулированием выйти на режим при максимальной расчетной повышенной температуре топлива. Это приводит к тому, что на остальных температурных режимах переходной процесс по давлению оказывается чрезмерно долгим, то есть, выбранные уставки этим режимам не соответствуют.
Введение функциональной зависимости коэффициентов регулятора ССД от давления не приводит к качественным изменениям ввиду накладываемых границей устойчивости системы ограничений. Из-за этого органы управления ввиду малой величины сигнала стабилизации давления оказываются задействованы не полностью - скорость изменения расходной характеристики сопел оказывается меньше максимально возможной. То есть, остается незадействованный потенциал органов управления на отработку рассогласования. Наиболее эффективным в описанной ситуации методом улучшения качества переходных процессов, является введение функциональной коррекции сигнала уставок по давлению в КС ТРДУ. В таком случае уравнение (1) принимает вид:

При разработке алгоритма коррекции уставок на участке ВДУ были приняты следующие условия:
- изменение величины уставки проводится в случае длительного перехода на стационарный режим и не должно оказывать влияния на стандартно протекающие переходные процессы в КС, а также на функционирование ТРДУ после выхода на стационарный участок тяги;
- изменение уставки не должно происходить скачкообразно, так как резкое и значительное изменение управляющего сигнала приводит к генерации колебаний давления в КС;
Алгоритм функциональной коррекции применим не только в случае длительного выхода на стационарный режим при настройке параметров ССД на функционирование при максимально допустимой температуре ТРТ, как изображено на фиг. 3, но и при любом неудовлетворительном характере переходного процесса по давлению, в том числе при большом перерегулировании по давлению на участке ВДУ в случае настройки параметров ССД для работы при минимальной температуре.
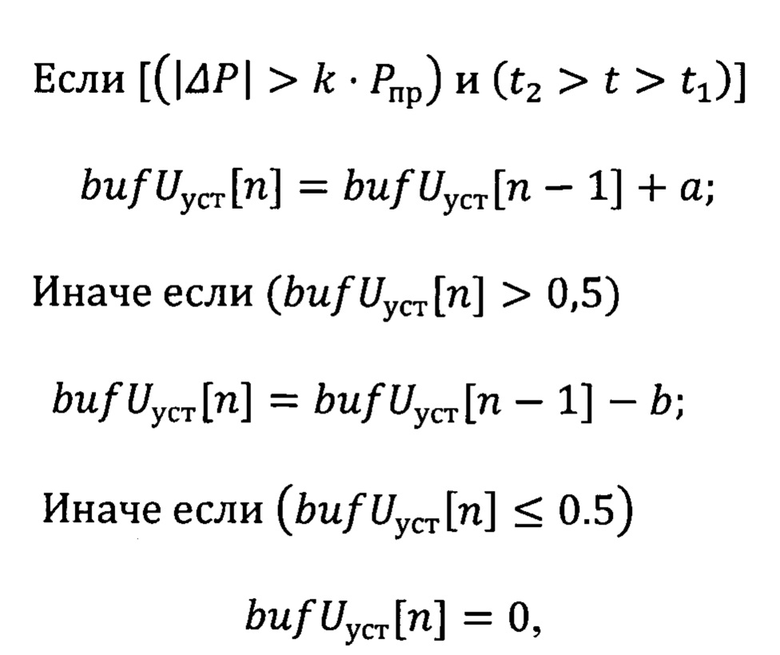
Алгоритм функциональной коррекции уставок вызывается каждый такт управления ТРДУ в конце формирования командного (управляющего) сигнала на ОУ:
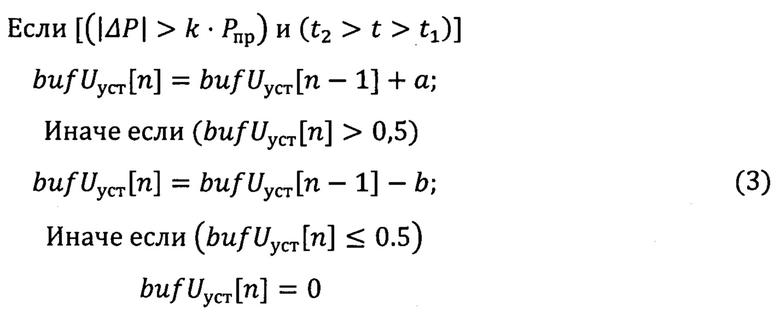
где
ΔР - разница между требуемым и измеренным давлением в камере сгорания,
k - коэффициент допустимого отклонения давления от требуемой величины, в рассматриваемом случае k=0.1,
Рпр - требуемая (программная) величина давления,
t1, t2 - временные границы действия алгоритма, в рассматриваемом случае t1=0.1 с., t2=0.4 с.,
bufUуст - величина корректирующего сигнала, используемая для расчета величины сигнала уставки Uуст,
n - текущий такт вычисления,
а - величина нарастания сигнала уставок, в рассматриваемом случае а=2,
b - величина возврата сигнала уставок к своему стационарному значению, в рассматриваемом случае b=0,125.
В случае длительного перехода на стационарный режим, как изображено на фиг. 3, зона включения алгоритма (3) выглядит следующим образом:
Если 
что графически отображено на фиг. 4. В расчете величины сигнала уставки текущего такта величина корректирующего сигнала вычитается из величины сигнала уставки (предыдущего такта), для обеспечения закрытия сопла и, следовательно, увеличения давления в КС:

В случае возникновения значительного перерегулирования по давлению при максимальной температуре ТРТ, когда параметры ССД настроены на функционирование при минимальной температуре топлива, зона включения алгоритма (3) выглядит следующим образом:
Если 
что графически отображено на фиг. 5. В расчете величины сигнала уставки текущего такта величина корректирующего сигнала прибавляется к величине сигнала уставки (предыдущего такта), для обеспечения открытия сопла и, следовательно, уменьшения давления в КС:

Если текущее давление в КС находится внутри области работы алгоритма (фиг. 4 и фиг. 5), происходит увеличение величины корректирующего сигнала bufUуст. Дальнейшее уменьшение Uуст на величину bufUуст. приводит к уменьшению площади критического сечения сопла, из-за чего давление в КС увеличивается. Увеличение Uycт на величину bufUуст. приводит к увеличению критического сечения сопла, из-за чего давление в КС уменьшается. При выходе давления из зоны работы алгоритма происходит плавное уменьшение bufUуст. и, следовательно, возвращение сигнала уставки ОУ Uycт до его стационарной величины. Если текущее давление в КС не находится в области работы алгоритма, и отсутствует сигнал bufUуст., функциональная коррекция уставок ОУ не осуществляется. Параллельно с возвращением сигнала уставки ОУ к стационарной величине происходит изменение интегральной составляющей регулятора ССД до величины, позволяющей парировать изначально неподходящую величину уставки.
На фиг. 6 изображены графики сигнала управления ОУ и интегральной составляющей сигнала ССД при работающем алгоритме функциональной коррекции уставок. Пунктиром изображено поведение сигнала управления без применения алгоритма.
На фиг. 7 изображены аналогичные фиг. 3 переходные процессы по давлению в КС на участке ВДУ, но с применением описанного в (3) и изображенного на фиг. 4 алгоритма. На фиг. 8 изображены графики давлений для трех температурных режимов на всем участке работы ТРДУ с применением алгоритма.
Результаты моделирования фиг. 8 подтверждают эффективность применения алгоритма функциональной коррекции уставки, а также удовлетворяют выдвинутым алгоритму требованиям.
После настройки с помощью математической модели алгоритм коррекции включается в ССД реального двигателя, обрабатывая реальное давление в камере сгорания и корректируя положение органов управления, тем самым позволяя реальной ТРДУ функционировать в условиях параметрической неопределенности.
Таким образом, заявлен способ управления твердотопливной регулируемой двигательной установкой в условиях параметрической неопределенности, заключающийся в изменении площади критического сечения сопел путем подачи на привод сопел управляющего сигнала системы стабилизации давления, формируемого в зависимости от измеренного давления в двигателе. Отличительная особенность заявленного способа заключается в том, что требуемое качество управления в условиях, когда температура топливного заряда заранее неизвестна и не совпадает с величиной, используемой при настройке системы стабилизации давления, обеспечивают с помощью корректирующего сигнала, величина которого рассчитывается в системе стабилизации давления по алгоритму:
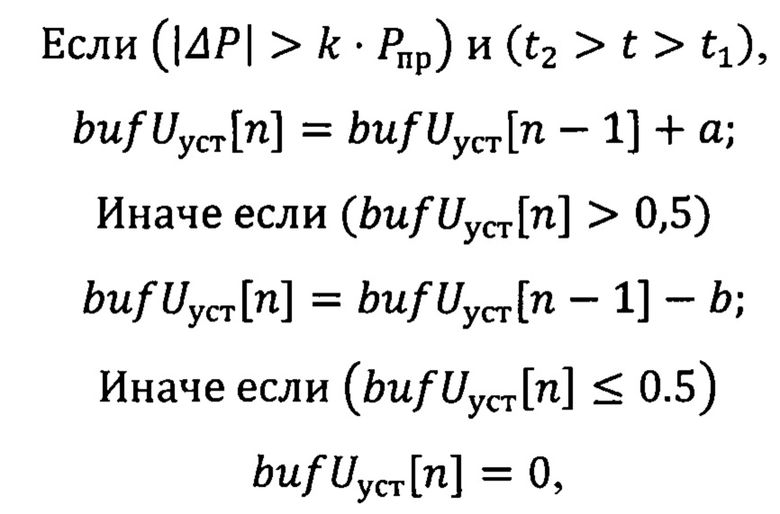
где
ΔР - разница между требуемым и измеренным давлением в камере сгорания,
k - коэффициент допустимого отклонения давления от требуемой величины,
Рпр - требуемая (программная) величина давления,
t1, t2 - временные границы действия алгоритма,
bufUуст.- величина корректирующего сигнала, используемая для расчета величины сигнала уставки Uуст,
n - текущий такт вычисления,
а - величина нарастания сигнала управления,
b - величина возврата сигнала управления к своему стационарному значению;
при этом величина сигнала уставки, используемая для формирования сигнала управления, рассчитывается следующим образом:
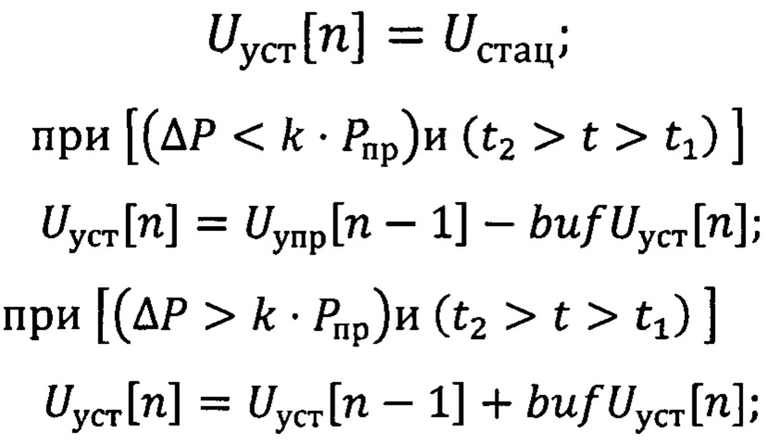
где Uстац - величина сигнала уставки выбранная для стационарного участка, Uуст - величина сигнала уставки для формирования сигнала управления.
Техническим результатом изобретения является возможность использовать ТРДУ при температурах топливного заряда, отличных от расчетных.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ГЛУБОКОГО РЕГУЛИРОВАНИЯ | 2019 |
|
RU2739203C1 |
| Твёрдотопливная двигательная установка многократного включения и способ ее многократного включения | 2018 |
|
RU2709117C1 |
| ПРЯМОТОЧНЫЙ ВОЗДУШНО-РЕАКТИВНЫЙ ДВИГАТЕЛЬ С РАСПРЕДЕЛЕННЫМ ПО ДЛИНЕ ТЕПЛОМАССОПОДВОДОМ | 2006 |
|
RU2315193C1 |
| ТОРПЕДНАЯ ТВЕРДОТОПЛИВНАЯ УПРАВЛЯЕМАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2005 |
|
RU2310155C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ СКОРОСТИ ГОРЕНИЯ ВЫСОКОЭНЕРГЕТИЧНОЙ КОНДЕНСИРОВАННОЙ СИСТЕМЫ | 1999 |
|
RU2175399C2 |
| РАКЕТА | 2014 |
|
RU2548957C1 |
| ПИРОТЕХНИЧЕСКАЯ СИСТЕМА ВОСПЛАМЕНЕНИЯ СОПРОВОЖДЕНИЯ | 2000 |
|
RU2178093C2 |
| МАНЕВРИРУЮЩАЯ СТУПЕНЬ РАКЕТЫ С КОМБИНИРОВАННОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ И СПОСОБ УПРАВЛЕНИЯ ЕЕ ДВИЖЕНИЕМ | 2010 |
|
RU2427507C1 |
| Реактивная система управления малым космическим аппаратом | 2023 |
|
RU2820375C1 |
| ДВУХРЕЖИМНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ | 1994 |
|
RU2084676C1 |
Изобретение относится к ракетной технике, в частности к управлению ракетными двигателями твердого топлива. Способ управления твердотопливной регулируемой двигательной установкой, заключающийся в изменении площади критического сечения сопел путем подачи на привод сопел управляющего сигнала системы стабилизации давления, формируемого в зависимости от измеренного давления в двигателе, согласно изобретению, требуемое качество функционирования двигателя в условиях параметрической неопределенности достигается введением в системы стабилизации давления (ССД) функциональной коррекции сигнала уставок по измеренному давлению в камере сгорания твердотопливной ракетной двигательной установки (ТРДУ). Изобретение обеспечивает использование ТРДУ при температурах топливного заряда, отличных от расчетных. 8 ил.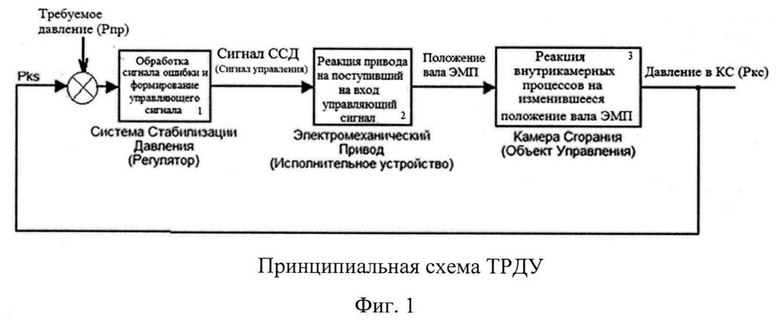
Способ управления твердотопливной регулируемой двигательной установкой в условиях параметрической неопределенности, заключающийся в изменении площади критического сечения сопел путем подачи на привод сопел управляющего сигнала системы стабилизации давления, формируемого в зависимости от измеренного давления в двигателе, отличающийся тем, что требуемое качество управления в условиях, когда температура топливного заряда заранее неизвестна и не совпадает с величиной, используемой при настройке системы стабилизации давления, обеспечивают с помощью корректирующего сигнала, величина которого рассчитывается в системе стабилизации давления по алгоритму:
где
ΔР - разница между требуемым и измеренным давлением в камере сгорания,
k - коэффициент допустимого отклонения давления от требуемой величины,
Рпр - требуемая (программная) величина давления,
t1, t2 - временные границы действия алгоритма,
bufUуст - величина корректирующего сигнала, используемая для расчета величины сигнала уставки Uуст,
n - текущий такт вычисления,
а - величина нарастания величины сигнала уставок,
b - величина возврата величины сигнала уставок к своему стационарному значению;
при этом величина сигнала уставки, используемая для формирования сигнала управления, рассчитывается следующим образом:
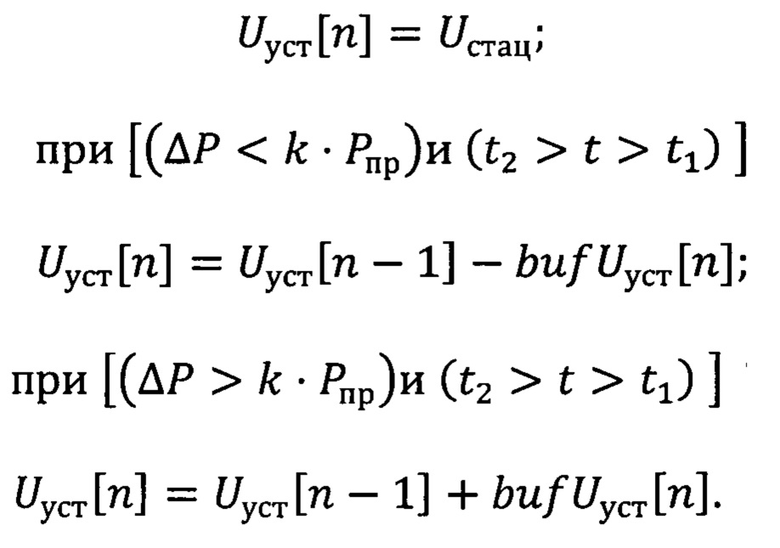
где Uстац - величина сигнала уставки, выбранная для стационарного участка,
Uycт - величина сигнала уставки.
| Абугов Д.И | |||
| и др | |||
| "Теория и расчет ракетных двигателей твердого топлива", М., Машиностроение, 1987, с.11-14, 60-71, 73-77, 176-188 | |||
| СПОСОБ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ГЛУБОКОГО РЕГУЛИРОВАНИЯ | 2019 |
|
RU2739203C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ТЕХНОЛОГИЧЕСКИХ ПАРАМЕТРОВ | 2011 |
|
RU2461857C1 |
| СПОСОБ БЕЗЫНЕРЦИОННОГО ОПРЕДЕЛЕНИЯ ПРЕДЕЛА МИНИМАЛЬНОГО ДАВЛЕНИЯ УСТОЙЧИВОСТИ РАБОЧЕГО ПРОЦЕССА ТРДУ | 2008 |
|
RU2376490C1 |
| CN 108488005 A, 04.09.2018. | |||
