Изобретение относится к ракетной технике, в частности к управлению ракетными двигателями твердого топлива.
Известен способ управления двигателем глубокого регулирования (ДГР), описанный в открытом источнике (Абугов Д.И., Бобылев В.М. Теория и расчет ракетных двигателей твердого топлива, стр. 11-14, 60-71, 73-77, 176-188), и принятый за прототип. Твердотопливная регулируемая двигательная установка (ТРДУ), устанавливается на верхние ступени ракетных комплексов. Конструктивно представляет собой твердотопливный ракетный двигатель с топливным зарядом торцевого горения с высокой чувствительностью скорости горения от давления. Регулирование тяги осуществляется изменением суммарной площади критического сечения сопел, расположенных произвольным образом на двигателе.
Существенным недостатком подобных двигательных установок является нестационарность зависимости скорости горения от давления в камере сгорания при переходе между стационарными участками тяги.
Известно выражение для расчета скорости горения U=Ul⋅Pv, где U - скорость горения, U1 - коэффициент, Р - давление в КС, ν - показатель степени. Текущее давление в КС определяется с помощью дифференциального уравнения  где
где  - секундный расход твердого топлива в КС;
- секундный расход твердого топлива в КС;  - секундный газоприход в КС;
- секундный газоприход в КС;  - секундный газорасход в КС;
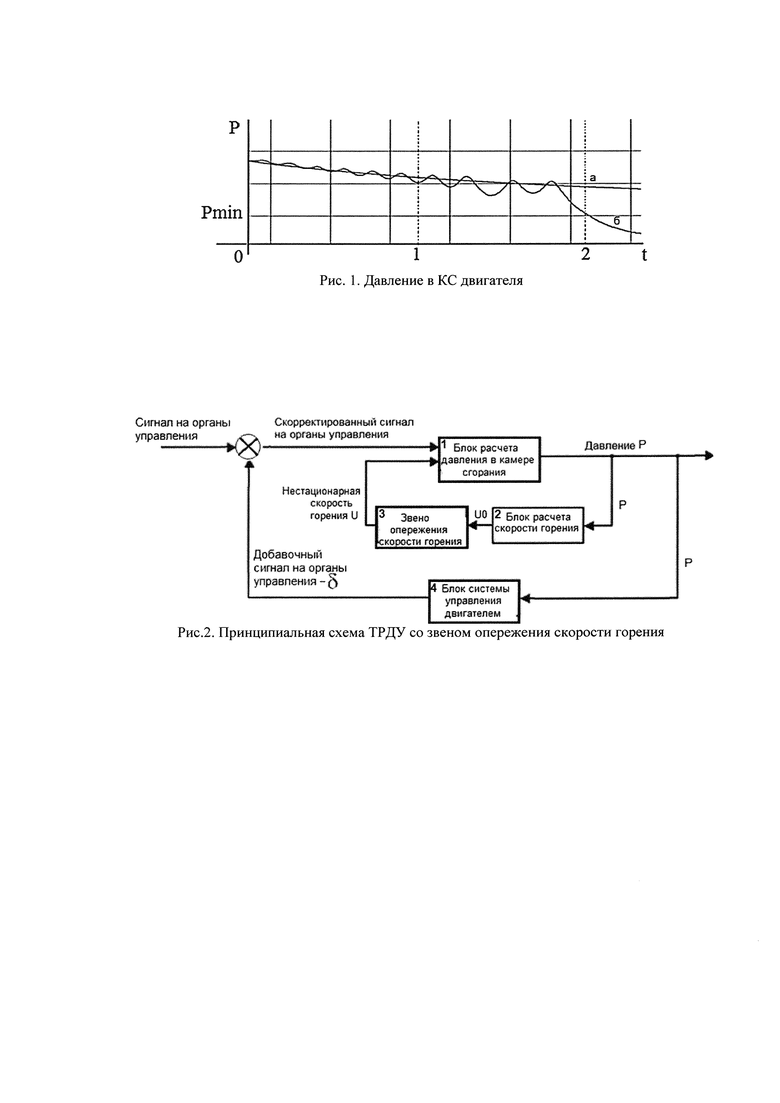
- секундный газорасход в КС;  где U - скорость горения топлива; S - площадь горящей поверхности топлива; γ - удельный вес топлива. Вычисляемая таким образом скорость горения называется стационарной, так как описывает зависимость скорости горения топлива от давления в камере сгорания (КС) на стационарных режимах горения топливного заряда. Однако ДГР функционирует в высокодинамичном режиме с регулированием тяги на минимально-реализуемых уровнях. При динамичных процессах на таких участках тяги в совокупности с условием малого свободного объема камеры сгорания велика вероятность возникновения низкочастотных колебаний, которые могут привести к затуханию топливного заряда, что является недопустимым для рассматриваемого твердотопливного двигателя. Реальная скорость горения топлива в камере сгорания рассматриваемого двигателя при этом не является стационарной, поэтому если не учитывать этого факта при синтезе алгоритма управления двигателя, обеспечить требуемое качество регулирования практически невозможно, из-за чего двигатель не может выполнить поставленную перед ним задачу. На рис. 1 изображен график давления (программная (а) и реальная (б) величины) в КС при проведении натурных испытаний ТРДУ, отражающий поставленную проблему. При выходе на режим малой тяги сразу после включения двигательной установки возникли низкочастотные колебания давления, что привело к прекращению работы двигателя.
где U - скорость горения топлива; S - площадь горящей поверхности топлива; γ - удельный вес топлива. Вычисляемая таким образом скорость горения называется стационарной, так как описывает зависимость скорости горения топлива от давления в камере сгорания (КС) на стационарных режимах горения топливного заряда. Однако ДГР функционирует в высокодинамичном режиме с регулированием тяги на минимально-реализуемых уровнях. При динамичных процессах на таких участках тяги в совокупности с условием малого свободного объема камеры сгорания велика вероятность возникновения низкочастотных колебаний, которые могут привести к затуханию топливного заряда, что является недопустимым для рассматриваемого твердотопливного двигателя. Реальная скорость горения топлива в камере сгорания рассматриваемого двигателя при этом не является стационарной, поэтому если не учитывать этого факта при синтезе алгоритма управления двигателя, обеспечить требуемое качество регулирования практически невозможно, из-за чего двигатель не может выполнить поставленную перед ним задачу. На рис. 1 изображен график давления (программная (а) и реальная (б) величины) в КС при проведении натурных испытаний ТРДУ, отражающий поставленную проблему. При выходе на режим малой тяги сразу после включения двигательной установки возникли низкочастотные колебания давления, что привело к прекращению работы двигателя.
Задачей изобретения является обеспечение стабильности зависимости скорости горения от давления в КС и предотвращение затухания топливного заряда на режимах малой тяги.
Указанная задача выполняется за счет того, что в способе управления двигателем глубокого регулирования, заключающийся в изменении площади критического сечения сопел путем подачи на привод сопел управляющего сигнала, формируемого в зависимости от измеренного давления в двигателе, согласно изобретению, стабильность зависимости скорости горения от давления в камере сгорания двигателя обеспечивают изменением сигнала скорости горения топлива посредством динамического звена опережения, введенного в контур расчета скорости горения топлива в модели двигателя, таким образом, изменяют сигнал давления в камере сгорания модели двигателя и подают его на вход системы управления двигателем, тем самым корректируя его управляющий сигнал.
Таким образом, обеспечивается стабильность работы реального двигателя при переходе на малые режимы тяги.
Для учета нестационарности зависимости скорости горения от давления в КС рассматриваемого двигателя предлагается использовать динамическое звено опережения, которое выражается дифференциальным уравнением:
где U - скорость горения твердого ракетного топлива (ТРТ), U0 - ее стационарная величина, T1 и Т2 - постоянные времени звена, ξ - декремент затухания. Звено такого вида приблизительно отображает процесс, протекающий в реальном двигателе.
На рис. 2 приведена принципиальная схема ТРДУ с учетом звена опережения. Схема была создана на основе теоретических знаний о процессах в двигателе, и ее вид подтвержден экспериментами. Здесь блок 1 - это блок расчета давления в камере сгорания на основании состояния органов управления. Блок 2 - блок расчета скорости горения по информации о давлении в камере сгорания, блок 3 - звено опережения скорости горения, блок 4 - блок системы управления двигателем. Блоки 2 и 3 имеют место только в модели двигателя, так как в реальном двигателе расчет и опережение скорости горения не производятся - это единственное различие принципиальной схемы модели от схемы реального двигателя. Входным параметром для расчета «нестационарности» является стационарная скорость горения ТРТ в КС - U0. На рис. 2 на вход контура ТРДУ поступает сигнал на органы управления - заслонки сопловых блоков, изменяющих площадь критического сечения сопел и, следовательно, газорасход из КС. Вследствие изменения газорасхода меняется давление в КС, рассчитываемое в блоке 1, по информации с датчиков давления в блоке 2 рассчитывается стационарная скорость горения ТРТ U0, поступающая на вход блока 3 - звена опережения. На выходе динамического звена (блока 3) - нестационарная скорость горения, опережающая по фазе рассчитанную величину в некотором диапазоне частот, которая далее участвует в определении давления в КС, поступая на вход блока 1. Указанное давление также начинает опережать реальное значение давления, имитируя явление низкочастотных колебаний в КС.
Важно отметить, что особый интерес представляет факт постоянного перерасчета постоянных времени, что позволяет учитывать нестационарность скорости горения, не изменяя существенно поведение системы на тех участках давления, где это не является необходимым. С учетом динамичности коэффициентов изобразим на рис. 3 логарифмические частотные характеристики звена в интерполяционных точках.
Для реализации в моделирующем комплексе звено надо представить в виде системы дифференциальных уравнений:

для этого приведем выражение динамического звена к общему виду, разделив обе части уравнения на Т22:

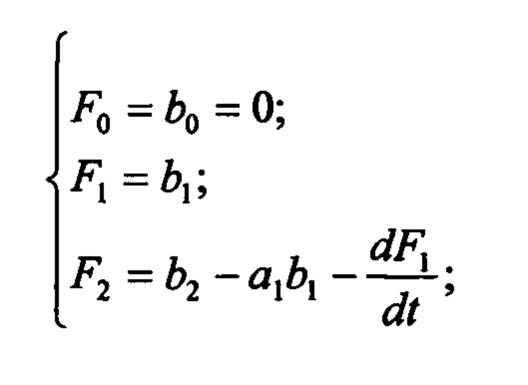
Теперь несложно заметить, что в рассматриваемом случае коэффициенты
а0 = 1,  b0 = 0,
b0 = 0,  тогда итоговая система дифференциальных уравнений:
тогда итоговая система дифференциальных уравнений:
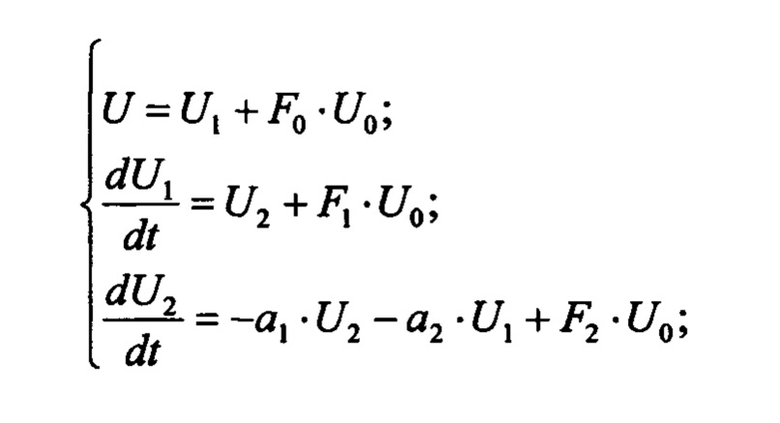
Учитывая, что b0 = 0, получаем
Введение описанного звена в контур расчета скорости горения позволяет учесть процесс нестационарности горения ТРТ, что дает возможность синтезировать алгоритм управления тягой, который будет обеспечивать работу двигательной установки на малых режимах тяги. Результаты натурных испытаний подтверждают работоспособность описанного метода. На рис. 4 представлен график давления в камере сгорания двигателя при проведении натурных испытаний - наложение реального давления в КС (б) на программное (а). В отличие от ситуации, представленной на рис. 1, двигательная установка не прекратила своего функционирования и смогла выполнить свою задачу в условиях работы на малом режиме тяги. Это значит, что алгоритм управления тягой ТРДУ, синтезированный с учетом звена опережения, обладает достаточным качеством регулирования. То есть, введение звена опережения в контур расчета скорости горения помогло решить поставленную задачу, позволив учесть нестационарность зависимости скорости горения топлива от давления при динамичных режимах работы ТРДУ.
Таким образом, заявлен способ управления двигателем глубокого регулирования, заключающийся в изменении площади критического сечения сопел путем подачи на привод сопел управляющего сигнала, формируемого в зависимости от измеренного давления в двигателе. Отличительная особенность способа заключается в том, что стабильность зависимости скорости горения от давления в камере сгорания двигателя обеспечивают изменением сигнала скорости горения топлива посредством динамического звена опережения, введенного в контур расчета скорости горения топлива в модели двигателя, таким образом, изменяют сигнал давления в камере сгорания модели двигателя и подают его на вход системы управления двигателем, тем самым корректируя его управляющий сигнал.
Техническим результатом изобретения является обеспечение стабильности зависимости скорости горения от давления в КС и предотвращение затухания топливного заряда на режимах малой тяги.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ТВЕРДОТОПЛИВНОЙ РЕГУЛИРУЕМОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ В УСЛОВИЯХ ПАРАМЕТРИЧЕСКОЙ НЕОПРЕДЕЛЕННОСТИ | 2022 |
|
RU2808714C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ГОРЕНИЯ ТВЕРДОГО РАКЕТНОГО ТОПЛИВА | 2011 |
|
RU2494275C2 |
| ТВЕРДОТОПЛИВНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ | 2014 |
|
RU2569539C1 |
| КАТАПУЛЬТНОЕ УСТРОЙСТВО ДЛЯ АВАРИЙНОГО СПАСЕНИЯ ПИЛОТА | 2002 |
|
RU2232698C1 |
| РАКЕТНЫЙ ДВИГАТЕЛЬ ПОДАЧИ ЗАРЯДА РАЗМИНИРОВАНИЯ | 2018 |
|
RU2711328C1 |
| ВОСПЛАМЕНИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ РАКЕТНЫХ ТОПЛИВ | 1996 |
|
RU2133725C1 |
| СПОСОБ ГАЗОДИНАМИЧЕСКОЙ СТАБИЛИЗАЦИИ ДАВЛЕНИЯ В КАМЕРЕ МОДЕЛЬНОГО ДВИГАТЕЛЯ С ЗАРЯДАМИ ТВЕРДОГО РАКЕТНОГО ТОПЛИВА С ВЫСОКОЙ ЧУВСТВИТЕЛЬНОСТЬЮ СКОРОСТИ ГОРЕНИЯ ОТ ДАВЛЕНИЯ | 2006 |
|
RU2327052C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ГОРЕНИЯ ТВЕРДОГО РАКЕТНОГО ТОПЛИВА | 2012 |
|
RU2505699C1 |
| Твёрдотопливная двигательная установка многократного включения и способ ее многократного включения | 2018 |
|
RU2709117C1 |
| СПОСОБ БЕЗЫНЕРЦИОННОГО ОПРЕДЕЛЕНИЯ ПРЕДЕЛА МИНИМАЛЬНОГО ДАВЛЕНИЯ УСТОЙЧИВОСТИ РАБОЧЕГО ПРОЦЕССА ТРДУ | 2008 |
|
RU2376490C1 |

Изобретение относится к ракетной технике, в частности к управлению ракетными двигателями твердого топлива. В заявленном способе управления двигателем глубокого регулирования, заключающемся в изменении площади критического сечения сопел путем подачи на привод сопел управляющего сигнала системы управления двигателем, формируемого в зависимости от измеренного давления в двигателе, согласно изобретению, стабильность зависимости скорости горения от давления в камере сгорания двигателя обеспечивают изменением сигнала скорости горения топлива посредством динамического звена опережения, введенного в контур расчета скорости горения топлива модели двигателя, в результате чего изменяют сигнал давления в камере сгорания модельного двигателя и подают его на вход системы управления, которую перенастраивают соответствующим этому сигналу образом, далее эту систему управления устанавливают на двигатель и тем самым корректируют его управляющий сигнал. Техническим результатом изобретения является обеспечение стабильности зависимости скорости горения от давления в КС и предотвращение затухания топливного заряда на режимах малой тяги. 4 ил.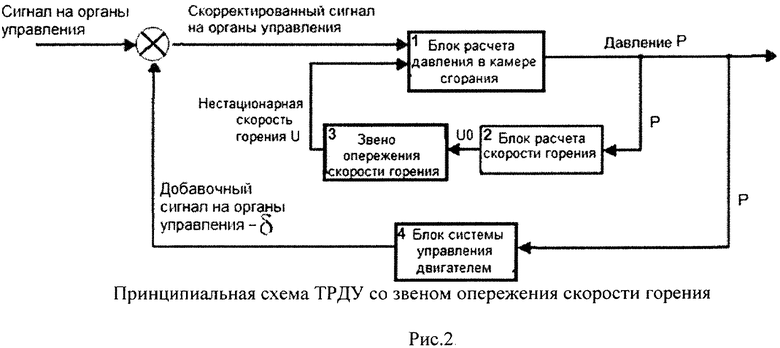
Способ управления двигателем глубокого регулирования, заключающийся в изменении площади критического сечения сопел путем подачи на привод сопел управляющего сигнала, формируемого в зависимости от измеренного давления в двигателе, отличающийся тем, что стабильность зависимости скорости горения от давления в камере сгорания двигателя обеспечивают изменением сигнала скорости горения топлива посредством динамического звена опережения, введенного в контур расчета скорости горения топлива в модели двигателя, таким образом изменяют сигнал давления в камере сгорания модели двигателя и подают его на вход системы управления двигателем, тем самым корректируя его управляющий сигнал.
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2631974C2 |
| Пила для поперечной распиловки дерева | 1930 |
|
SU24579A1 |
| СПОСОБ КОРРЕКЦИИ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2017 |
|
RU2658571C1 |

