Группа изобретений относится к области авиастроения.
Из существующего уровня техники известен беспилотный летательный аппарат (БПЛА) [патент на изобретение RU 2723 С1 516 «Конвертеплан», принятый за прототип], содержащий фюзеляж, систему управления, аэродинамические консоли крыла с аэродинамическими управляющими поверхностями, переднее горизонтальное оперение с аэродинамическими управляющими поверхностями, хвостовое оперение и винтомоторные группы с воздушными винтами, причем винтомоторные группы с воздушными винтами размещены с возможностью поворота на законцовках переднего горизонтального оперения и на хвостовом оперении, при этом конвертоплан выполнен с возможностью обеспечения совпадения аэродинамического центра давления и результирующего вектора тяги, а также с возможностью их взаимного динамического и статического скалярного управления за счет работы аэродинамических управляющих поверхностей и управления вектором тяги каждой из винтомоторной групп, а винтомоторные группы, расположенные на законцовке переднего горизонтального оперения, выполнены с встречным вращением воздушного винта и с возможностью обеспечения динамического смещения центра давления, при этом винтомоторные группы выполнены с осевой степенью свободы, а также с возможностью независимого управления друг от друга изменением вектора тяги, оборотов и управлением углом установки лопастей.
Недостатки прототипа: сложность систем автоматического управления (САУ), обусловленная наукоемкостью решения при управлении поворотами винтомоторных групп (ВМГ), выполненных с осевой степенью свободы, а также с возможностью независимого управления друг от друга изменением вектора тяги, оборотов и управлением углом установки лопастей, сложность, а главное дороговизна систем поворотной механики для каждой из ВМГ и при этом недостаточная энергоэффективность при потере части нагрузки ВМГ на ометаемую поверхность, а также снижение доли полезной нагрузки ввиду большей весовой доли конструкции планера и поворотной механики ВМГ и прочих регулируемых узлов конвертопланов, малый диапазон и сложность установки возможных центров тяжести при подвесе различных вариантов полезной нагрузки, а также отсутствие возможности взлетать и находиться на высоте, ограниченной длиной электрического кабеля, с электропитанием от внешнего источника электроэнергии.
Однако из уровня техники не известен беспилотный летательный аппарат (БПЛА) типа конвертоплан, способный взлетать и находиться на высоте, ограниченной длиной электрического кабеля, с электропитанием от внешнего источника электроэнергии, использующий электродвигатели с импеллером с простым одновременным поворотным механизмом, исключающими потери части нагрузки ВМГ на ометаемую поверхность, крыльев, сочетающий в себе свойства, самолета и конвертоплана, имеющий возможность вертикального взлета и посадки, как конвертоплан на твердую поверхность любого типа, совершать полет по самолетному и обладать сверхманевренностью, с возможностью очень быстро изменять направление полета в горизонтальной плоскости на любой угол, а также зависать на одном месте как мультикоптер, с многофункциональной возможностью: ведения разведки, нанесения точечных бомбовых ударов и противодействия БПЛА противника,
Таким образом, остается актуальной задача создания беспилотного летательного аппарата (БПЛА) типа конвертоплан, способный взлетать и находиться на высоте, ограниченной длиной электрического кабеля, с электропитанием от внешнего источника электроэнергии, использующий электродвигатели с импеллером с простым одновременным поворотным механизмом, исключающими потери части нагрузки ВМГ на ометаемую поверхность, крыльев, сочетающий в себе свойства, самолета и конвертоплана, имеющий возможность вертикального взлета и посадки, как конвертоплан на твердую поверхность любого типа, совершать полет по самолетному и обладать сверхманевренностью, с возможностью очень быстро изменять направление полета в горизонтальной плоскости на любой угол, а также зависать на одном месте как мультикоптер, с многофункциональной возможностью: ведения разведки, нанесения точечных бомбовых ударов и противодействия БПЛА противника,
Задачей достижения технического результата, на который направлена заявленная группа изобретений, является создание беспилотного летательного аппарата (БПЛА) типа конвертоплан, способный взлетать и находиться на высоте, ограниченной длиной электрического кабеля, с электропитанием от внешнего источника электроэнергии, использующий электродвигатели с импеллером с простым одновременным поворотным механизмом, исключающими потери части нагрузки ВМГ на ометаемую поверхность, крыльев, сочетающий в себе свойства, самолета и конвертоплана, имеющий возможность вертикального взлета и посадки, как конвертоплан на твердую поверхность любого типа, совершать полет по самолетному и обладать сверхманевренностью, с возможностью очень быстро изменять направление полета в горизонтальной плоскости на любой угол, а также зависать на одном месте как мультикоптер, с многофункциональной возможностью: ведения разведки, нанесения точечных бомбовых ударов и противодействия БПЛА противника, а также имеющий возможность при использовании устройства вертикального запуска (УВЗ) для БПЛА вертикального взлета и посадки, без использования заряда собственной аккумуляторной батареи БПЛА длительно находиться на определенной высоте, ограниченной длиной электрического кабеля, с электропитанием от внешнего стационарного или передвижного источника электроэнергии, отключаемого по команде оператора при полной зарядке собственной аккумуляторной батареи БПЛА.
Указанная задача (достижение технического результата) решается тем, что предложен Беспилотный конвертоплан по пункту 1 формулы изобретения.
Указанная задача (достижение технического результата) решается тем, что предложен Беспилотный конвертоплан по пункту 2 формулы изобретения.
Указанная задача (достижение технического результата) решается тем, что предложен Беспилотный конвертоплан по пункту 3 формулы изобретения.
Технический результат достигается также в способе функционирования Беспилотного конвертоплана по пункту 4 формулы изобретения.
Технический результат достигается также в способе функционирования устройства вертикального запуска при использовании с беспилотным конвертопланом по пункту 5 формулы изобретения.
Сущность группы изобретений поясняется чертежами Фиг. 1 и Фиг. 2.
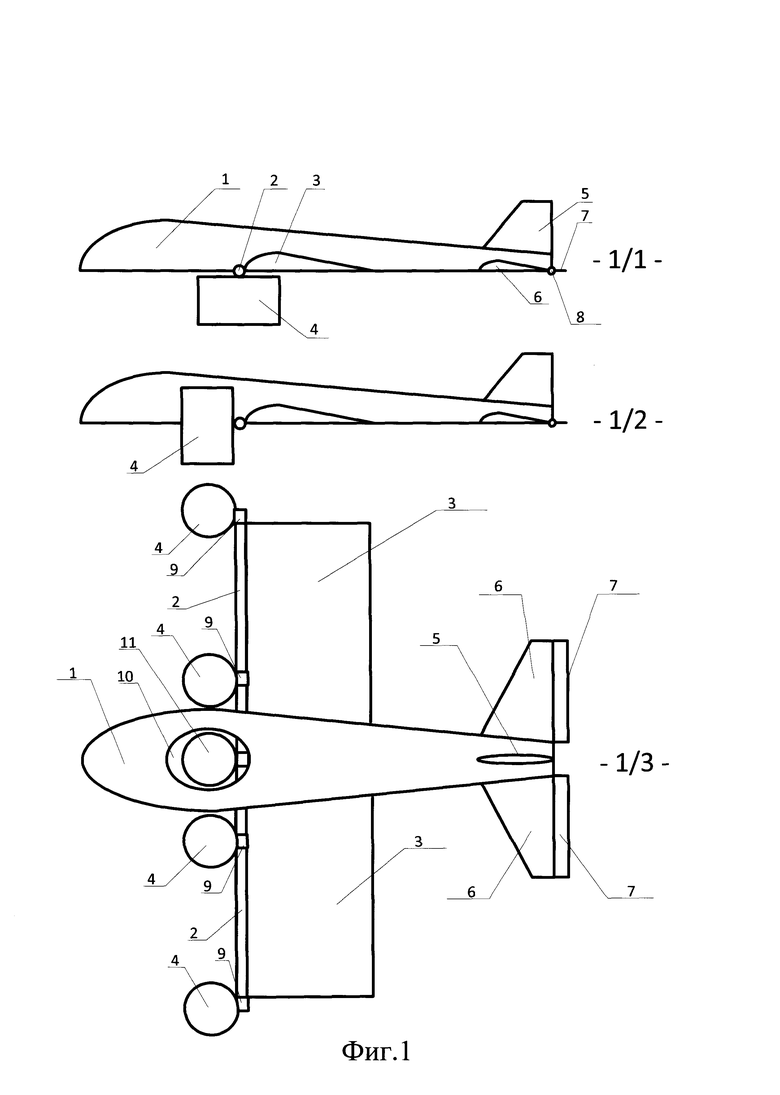
На чертеже Фиг. 1 представлены пояснительные эскизы: (-1/1-) вид Беспилотного конвертоплана сбоку в горизонтальном полете, где: 1 - корпус, 2 - поворотный вал, установленный на опорных подшипниках (на эскизе не показаны), 3 - прямое прямоугольное крыло плоско-выпуклого профиля, расположенное на корпусе 1 таким образом, чтобы поворотный вал 2 находился на центре тяжести полностью снаряженного Беспилотного конвертоплана, 4 - импеллер, с электродвигателем, с одним или двумя винтами, неизменяемого шага (на эскизе не показаны), работающий в режиме как тянущий, например для вариантов исполнения при четном количестве импеллеров, 5 - киль, например, без рулей направления хвостового оперения по нормальной «самолетной» аэродинамической схеме, 6 - стабилизатор, например, с рулями высоты по нормальной «самолетной» аэродинамической схеме, 7 - рули высоты, 8 - поворотная ось рулей высоты (привод на эскизе не показан). На эскизе (-1/2-) вид Беспилотного конвертоплана сбоку при вертикальном взлете или посадке, а также зависании в полете, где: 4 - импеллер, с электродвигателем, с одним или двумя винтами, неизменяемого шага (на эскизе не показаны), работающий в режиме как подъемный. На эскизе (-1/3-) вид Беспилотного конвертоплана сверху при вертикальном взлете или посадке, например, для вариантов исполнения при нечетном количестве импеллеров, где: 11 - нечетный импеллер, с электродвигателем, с одним или двумя винтами, неизменяемого шага (на эскизе не показаны), работающий в режиме как подъемный, для работы которого в центральной части корпуса 1 выполнена свободная зона перед воздухозабором 10 и устройства подвеса для ракетно-бомбового вооружения и средств поражения неприятельских дронов, установленные на нижней плоской поверхности прямого прямоугольного крыла на всех эскизах не показаны.
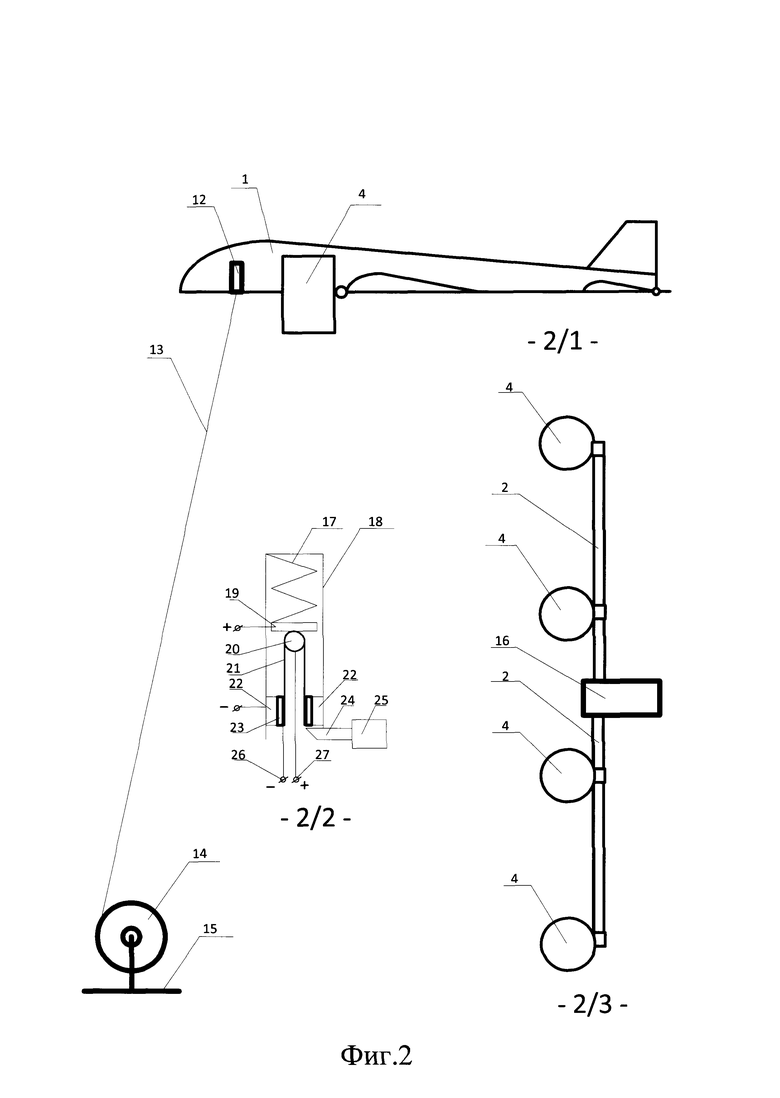
На чертеже Фиг. 2 представлены пояснительные эскизы (-2/1-) и (-2/2-) Устройства вертикального запуска (далее - УВЗ) для беспилотных или пилотируемых летательных аппаратов вертикального взлета и посадки, которое позволяет без использования заряда собственной аккумуляторной батареи летательного аппарата осуществлять вертикальный взлет и длительно находиться на определенной высоте, ограниченной длиной электрического кабеля, с электропитанием от внешнего стационарного или передвижного источника электроэнергии, отключаемого по команде оператора при полной зарядке собственной аккумуляторной батареи летательного аппарата. На эскизе (-2/1 -) вид Беспилотного конвертоплана сбоку для варианта исполнения, когда в носовой части корпуса 1 установлено штекерное устройство 12 управляемого отключения электрического кабеля, с электропитанием от внешнего источника электроэнергии, отключаемого по команде оператора, где: 12 - штекерное устройство управляемого отключения электрического кабеля, с электропитанием от внешнего источника электроэнергии, отключаемого по команде оператора, 13 - электрический двух или одножильный электрический кабель с металлическим тросовым кордом внутри, 14 - поворотный барабан с ручным или электроприводом (на эскизе не показан), на котором намотан электрический двух или одножильный электрический кабель с металлическим тросовым кордом внутри, 15 - основание, на котором, на котором установлен поворотный барабан с ручным или электроприводом. На эскизе (-2/2-) УВЗ, включающее в себя систему управления (на эскизе не показана), контакты минус 26 и плюс 27 электрического двух или одножильный электрического кабеля 13 с металлическим тросовым кордом внутри, который с одной стороны имеет возможность подключения через коммутационный аппарат (на эскизе не показан), к внешнему стационарному или передвижному источнику электроэнергии (на эскизе не показан), а с другой стороны подключен непосредственно к электрическому штекеру 21, который вручную подключается к штекерному устройству управляемого отключения электрического кабеля 12, установленному непосредственно на летательном аппарате и подключенному к аккумуляторной батарее, которое имеет возможность автоматического отключения по команде оператора летательного аппарата, где: 18 - изолирующий корпус штекерного устройства управляемого отключения электрического кабеля 12, 17 пружина, 19 -электрический контакт плюс, подключенный непосредственно к аккумуляторной батарее, 20 - электрический контакт плюс электрического штекера 21, 22 - электрический контакт минус, подключенный непосредственно к аккумуляторной батарее, 23 - электрический контакт минус электрического штекера 21, 24 - механическая защелка, управляемая сердечником электромагнита 25.
На эскизе (-2/3-) показан червячный редуктор с электроприводом 16, расположенный в корпусе 1, управляющий положением поворотного вала 2, установленного на опорных подшипниках (на эскизе не показаны), для поворота импеллеров 4 на угол 90 градусов в горизонтальное или вертикальное положение.
Работа наиболее предпочтительного варианта исполнения Беспилотного конвертоплана с четырьмя импеллерами осуществляется следующим образом. Запуск в полет Беспилотного конвертоплана может осуществляться несколькими известными способами, например по мультикоптерному, когда все импеллеры 4, с электродвигателем, с одним или двумя винтами, неизменяемого шага установлены вертикально и работают как подъемные, а затем импеллеры 4 переводятся в режим работы, как тянущие для горизонтального полета по самолетному и изменение положения всех импеллеров 4, с электродвигателем, с одним или двумя винтами, неизменяемого шага осуществляется по команде оператора при повороте на угол в пределах 90 градусов с помощью червячного редуктора с электроприводом 16, расположенный в корпусе 1, управляющий положением поворотного вала 2, установленного на опорных подшипниках (на эскизе не показаны). А также запуск может осуществляться, например по самолетному с помощью катапульты или дополнительного разгонного реактивного твердотопливного ускорителя, когда все импеллеры 4, с электродвигателем, с одним или двумя винтами, неизменяемого шага установлены горизонтально и работают как тянущие. Но наиболее интересный и предпочтительный запуск Беспилотного конвертоплана может осуществляться с помощью Устройства вертикального запуска (далее - УВЗ) для беспилотных или пилотируемых летательных аппаратов вертикального взлета и посадки и для этого все импеллеры 4, с электродвигателем, с одним или двумя винтами, неизменяемого шага должны быть установлены вертикально и работают как подъемные, а электрический штекер 21, вручную подключается к штекерному устройству управляемого отключения электрического кабеля 12, установленному непосредственно на Беспилотном конвертоплане и подключенному к его аккумуляторной батарее Фиг. 2 и таким образом, Беспилотный конвертоплан поднимается, подобно известному «воздушному змею» на высоту, определяемую длиной электрического кабеля 13 с металлическим тросовым кордом внутри. При этом аккумуляторная батарея Беспилотного конвертоплана не расходует свой запас электроэнергии, так как электроснабжение всех импеллеров 4, с электродвигателями осуществляется от внешнего стационарного или передвижного источника электроэнергии и соответственно Беспилотный конвертоплан способен длительно вести разведку без расхода собственного запаса электроэнергии. При установке УВЗ с подключенным Беспилотным конвертопланом на движущийся танк, БТР или БМП такая разведывательная система способна очень длительное время осуществлять разведку местности например в радиусе 26 км при длине 50 метров электрического кабеля 13 с металлическим тросовым кордом внутри. При обнаружении цели по команде оператора действием механической защелки 24, управляемой сердечником электромагнита 25, электрический штекер 21 отключается от штекерного устройства 12 управляемого отключения электрического кабеля и Беспилотный конвертоплан переводится в самостоятельный полет по мультикоптерному (все импеллеры 4, с электродвигателями вертикально) или по самолетному (все импеллеры 4, с электродвигателями горизонтально), как управляемый конвертоплан под управлением оператора для ведения разведки, нанесения точечных ракетно-бомбовых ударов и противодействия БПЛА противника. При полете по самолетному направление полета может регулироваться за счет изменения тяги импеллеров 4, с электродвигателями, установленными по краям плоскости прямого прямоугольного крыла плосковыпуклого профиля, а высота полета регулируется рулями высоты 7. Посадка Беспилотного конвертоплана осуществляется по мультикоптерному (все импеллеры 4, с электродвигателями вертикально) уменьшением тяги электродвигателей.
Алгоритм работы других вариантов исполнения Беспилотного конвертоплана, например, с верхним расположением крыла или с Н-образным хвостовым оперением (стабилизатор с рулями или без рулей высоты и два киля с рулями или без рулей направления), аналогичен вышеописанному.
Благодаря вышеперечисленному в группе изобретений достигается технический результат, заключающийся в создании беспилотного летательного аппарата (БПЛА) типа конвертоплан, способный взлетать и находиться на высоте, ограниченной длиной электрического кабеля, с электропитанием от внешнего источника электроэнергии, использующий электродвигатели с импеллером с простым одновременным поворотным механизмом, исключающими потери части нагрузки ВМГ на ометаемую поверхность, крыльев, сочетающий в себе свойства, самолета и конвертоплана, имеющий возможность вертикального взлета и посадки, как конвертоплан на твердую поверхность любого типа, совершать полет по самолетному и обладать сверхманевренностью, с возможностью очень быстро изменять направление полета в горизонтальной плоскости на любой угол, а также зависать на одном месте как мультикоптер, с многофункциональной возможностью: ведения разведки, нанесения точечных бомбовых ударов и противодействия БПЛА противника, а также имеющий возможность при использовании устройства вертикального запуска (УВЗ) для БПЛА вертикального взлета и посадки, без использования заряда собственной аккумуляторной батареи БПЛА длительно находиться на определенной высоте, ограниченной длиной электрического кабеля, с электропитанием от внешнего стационарного или передвижного источника электроэнергии, отключаемого по команде оператора при полной зарядке собственной аккумуляторной батареи БПЛА.
Изобретение относится к области авиации, в частности к конструкциям беспилотных летательных аппаратов. Беспилотный конвертоплан включает в себя аккумуляторную батарею, систему управления с модулем самонаведения на цель, корпус, выполненный по нормальной «самолетной» аэродинамической схеме с прямоугольным крылом. На передней кромке крыла на опорных подшипниках установлен поворотный вал с жестко закрепленными на нем двумя электродвигателями с импеллерами с встречным направлением вращения. Поворот двигателей на угол 90 градусов осуществляется поворотным валом через червячный редуктор привода с дополнительным электродвигателем управления. На нижней поверхности крыла установлены устройства подвеса для ракетно-бомбового вооружения и средств поражения дронов. В носовой части корпуса установлено штекерное устройство отключения электрического кабеля с электропитанием от внешнего источника электроэнергии. Обеспечивается возможность без использования заряда собственной аккумуляторной батареи осуществлять вертикальный взлет и находиться на высоте, ограниченной длиной электрического кабеля с электропитанием от внешнего источника электроэнергии. 3 н. и 2 з.п. ф-лы, 2 ил.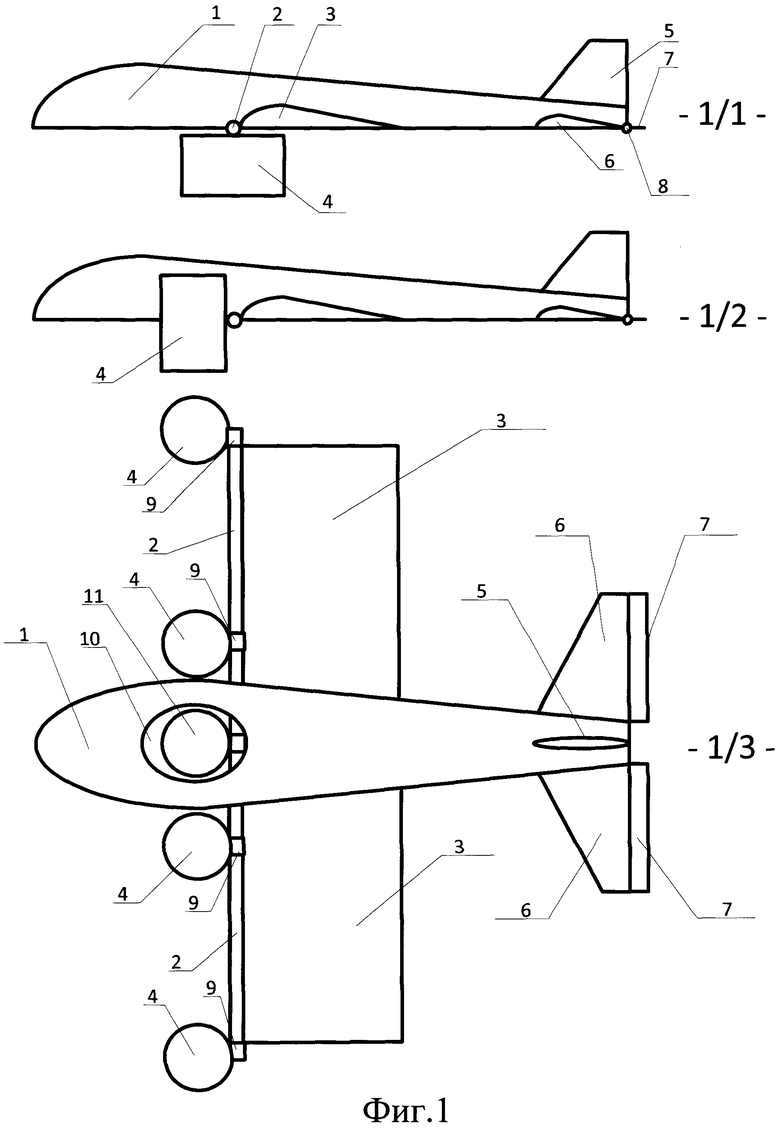
1. Беспилотный конвертоплан, сочетающий в себе свойства самолета и конвертоплана, характеризующийся тем, что включает в себя аккумуляторную батарею и систему управления с модулем самонаведения на цель, корпус, выполненный по нормальной «самолетной» аэродинамической схеме с низко или высоко расположенным прямым прямоугольным крылом плоско-выпуклого профиля, на передней кромке которого на опорных подшипниках установлен поворотный вал с жестко закрепленными на нем, как минимум, двумя электродвигателями с импеллерами с одним или двумя винтами неизменяемого шага и с встречным направлением вращения, поворот которых на угол 90 градусов осуществляется поворотным валом через червячный редуктор привода с дополнительным электродвигателем управления, и при этом на нижней плоской поверхности прямого прямоугольного крыла установлены устройства подвеса для ракетно-бомбового вооружения и средств поражения неприятельских дронов, а в носовой части корпуса установлено, подключенное к аккумуляторной батарее штекерное устройство управляемого отключения электрического кабеля, с электропитанием от внешнего источника электроэнергии, отключаемое по команде оператора.
2. Беспилотный конвертоплан по п. 1, отличающийся тем, что при использовании нечетного количества электродвигателей с импеллером в центральной части корпуса выполнена свободная зона перед воздухозабором нечетного электродвигателя с импеллером при его вертикальном положении.
3. Беспилотный конвертоплан по любому из пп. 1, 2, отличающийся тем, что имеет дополнительный сбрасываемый или не сбрасываемый твердотопливный ракетный ускоритель, установленный под корпусом в хвостовой части конвертоплана.
4. Способ функционирования беспилотного конвертоплана (далее - БК) по любому из пп. 1-3, заключающийся в том, что перевод режима работы, как подъемных, на режим работы, как тянущие, и наоборот для всех электродвигателей с импеллером БК, с одним или двумя винтами, неизменяемого шага, осуществляется единым поворотным валом, положение которого изменяется червячным редуктором привода с дополнительным электродвигателем управления на угол 90 градусов.
5. Способ функционирования устройства вертикального запуска (УВЗ) при использовании с беспилотным конвертопланом (далее - БК) по любому из пп. 1-3, при этом УВЗ включает в себя систему управления, поворотный барабан с ручным или электроприводом, на котором намотан электрический двух или одножильный электрический кабель с металлическим тросовым кордом внутри, который с одной стороны имеет возможность подключения через коммутационный аппарат к внешнему стационарному или передвижному источнику электроэнергии, а с другой стороны подключен непосредственно к электрическому штекеру, который подключается к штекерному устройству управляемого отключения электрического кабеля, установленному непосредственно на БК, заключающийся в том, что электрический штекер УВЗ, вручную подключают к штекерному устройству управляемого отключения электрического кабеля, установленному непосредственно на БК, с заранее установленными всеми импеллерами с электродвигателями в положение, как подъемные, и таким образом поднимают БК на высоту, определяемую длиной электрического кабеля с металлическим тросовым кордом внутри, и при этом аккумуляторная батарея БК не расходует свой запас электроэнергии, так как электроснабжение всех импеллеров с электродвигателями осуществляется от внешнего стационарного или передвижного источника электроэнергии УВЗ, а для перевода на самостоятельный полет БК дистанционно по команде оператора отключают электрический штекер УВЗ от штекерного устройства управляемого отключения электрического кабеля, установленного непосредственно на БК».
| АВИАЦИОННЫЙ РАКЕТНЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ УДАРНЫМ ВЕРТОЛЕТОМ-САМОЛЕТОМ | 2017 |
|
RU2674742C1 |
| US 20160144958 A1, 26.05.2016 | |||
| CN 110466754 A, 19.11.2019 | |||
| US 20200385115 A1, 10.12.2020 | |||
| WO 2021124213 A1, 24.06.2021 | |||
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОПИТАНИЯ ПРИВЯЗНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2711325C1 |
