Изобретение относится к средствам военной техники и может быть использовано в конструкции автономных винтокрылых модулей вооружения, выполненных по продольной схеме триплана с тандемным размещением разновеликих винтов на концах разнонаправленных крыльев с двумя парами больших и меньших однолопастных несущих винтов (НВ) и толкающим винтом на конце фюзеляжа-гондолы, используемыми соответственно при вертикальном и коротком взлете/посадке и крейсерском полете как самолета при зафиксированных лопастях-крыльях НВ или после его посадки и складывания крыльев с лопастями-крыльями НВ к оси симметрии в походную конфигурацию - перевозки по земле в грузовом отсеке на ложементе транспортно-заряжающей машины в составе противотанковых ракетных комплексов.
Известен беспилотный винтокрыл Quadcruiser европейской фирмы Airbus Group, имеющий четыре подъемных и один маршевый вертикально и горизонтально ориентированных двигателя соответственно с несущими и задним винтами, используемыми на вертолетных и самолетных режимах полета и размещенными на концах тандемных крыльев и фюзеляжа в гондолах с двигателями, содержит в фюзеляже из углепластика систему управления, аккумуляторные батареи и неубирающееся шасси.
Признаки, совпадающие - наличие прямых тандемных крыльев, имеющих на их концах четыре продолговатые мотогондолы, вынесенные за передние кромки крыльев с вертикально ориентированными электромоторами и двухлопастными НВ. Толкающий винт установлен сзади фюзеляжа за вертикальным оперением, обеспечивает маршевую тягу для горизонтального крейсерского полета со скоростью 90 км/ч.
Причины, препятствующие поставленной задаче: первая - это то, что четырехвинтовой "Quadcruiser" с задним толкающим винтом постоянного шага на конце фюзеляжа, используемым только на самолетных режимах полета, имеет, увеличивая паразитную массу, малую весовую отдачу. Вторая - это то, что расположенные на крыльевых мотогондолах тандемом НВ одинакового диаметра имеют радиусы, не превышающие длину продолговатых гондол на крыле, что ограничивает взлетный его вес. Третья - это то, что схема тандем, у которой основную подъемную силу, необходимую для крейсерского полета, создают прямые крылья, являясь несущими аэродинамическими поверхностями, а дополнительную подъемную силу - четыре двухлопастных НВ, но их составляющая в общей подъемной силе с крыльями ограничена. Поэтому возможность повышения маневренности при переходных маневрах и увеличения весовой отдачи при повышении скорости, взлетного веса и времени полета боле 50 минут, но и геометрических стояночных размеров планера весьма ограничено.
Известен противотанковый ракетный комплекс с воздушным модулем вооружения (патент RU 2470250 А1, 29.03.2012), включающий наземную боевую машину (бронетранспортер), содержащую средства базирования и управления воздушным модулем вооружения - беспилотный электрический вертолет двухвинтовой сосной схемы, оснащенный средствами целеуказания, комплексом вооружения, преимущественно средствами базирования противотанковых управляемых ракет, выполненный с возможностью базирования на наземной боевой машине и связан с ней кабелем связи.
Благодаря использованию беспилотного электрического вертолета (БПЭВ) в комплексе вооружений по указанному патенту RU 2470250 расширены возможности целеуказания, обеспечены дополнительные возможности для автономного ведения боевых действий, в том числе и ведения огня с хода, но при этом весьма ограничена дальность действии привязного БПЭВ и, как следствие, ограничение в дальности стрельбы. Кроме того, в материалах патента RU 2470250 не раскрыты средства, которые бы обеспечили надежное взаимодействие бронетранспортера и БПЭВ и, особенно, во время перезаряжания, а также возможность размещения БПЭВ с соосными винтами диаметром 4,5 м в бронетранспортере без системы складывании их лопастей.
Наиболее близким к предлагаемому изобретению является беспилотный авиационный комплекс израильской компании «IAI» (Israel Aircraftlndustries) (патент WO 2007/141795 A1, 13.12.2007) включает наземную платформу, содержащую средства базирования со стартовой станцией, энергетическую установку и блок управления полетом беспилотной многовинтовой системой (БПМС), имеющей четыре многолопастных вентилятора с электромоторами, обеспечивающих подъемную силу для вертикального взлета/посадки и позволяющих поддерживать на режиме висения заданную высоту БПМС без аэродинамических несущих его поверхностей.
Признаки, совпадающие - беспилотный авиационный комплекс включает также привязь, оперативно связывающую наземную платформу с БПМС, которая обеспечивает электрическую связь между БПМС и наземной платформой (НМ). Использование движителями внешнего источника энергии, установленного на НМ, а также невозможность совершать самостоятельный полет вне привязки к НМ - весьма ограничивают функциональные возможности беспилотного авиационного комплекса. В частности, высота подъема БПМС ограничена длиной привязи, которая продиктована, в том числе, массой входящего в нее кабеля. Кроме того, в материалах патента WO 2007/141795 не раскрыты средства, которые бы обеспечили надежное взаимодействие НМ и привязной БПМС с комплексом вооружения.
Предлагаемым изобретением решается задача в указанном выше известном беспилотный авиационный комплекс повышения скорости и дальности полета, увеличения взлетного веса и весовой отдачи, упрощение продольно-поперечной управляемости при вертикальном взлете, посадке и висении, а также возможности как мобильного, так и аэромобильного базирования в составе самоходных противотанковых ракетных комплексов, но и трансформации в походную конфигурацию для перевозки по земле в грузовом отсеке на ложементе транспортно-заряжающего бронетранспортера.
Отличительными признаками предлагаемого изобретения от указанного выше известного беспилотного авиационного комплекса, наиболее близкого к нему, являются наличие того, что упомянутая БПМС представляет собой беспилотный ударный вертолет-самолет (БУВС), выполненный по аэродинамической схеме продольного триплана с близкорасположенным передним горизонтальным оперением (ПГО) к разнонаправленным крыльям Х-образной стреловидности (ХОС) в плане и концепции тандемного размещения разновеликих винтов (ТРРВ) в несущей системе ТРРВ-Х2+2, обеспечивающей выполнение технологии вертикального и короткого взлета/посадки (ВВП и КВП) и включающей пару больших и пару меньших однолопастных несущих винтов (НВ) с профилированными телескопическими противовесами, смонтированных на пилонах соответственно на концах первого крыла обратной стреловидности (КОС), имеющего при отрицательном угле χ=-18° стреловидности обратное сужение, и второго стреловидного крыла (ВСК) с положительным углом χ=+18° стреловидности, снабженного по оси симметрии обтекателем с вертикальным оперением, имеющим руль направления и подкрыльный киль, и снабженный с задним расположением на конце короткого фюзеляжа одновинтовой пропульсивной системой (ОПС), смонтированной в кормовой мотогондоле с редуктором толкающего винта для создания маршевой тяги при скоростном горизонтальном полете, но и возможностью преобразования полетной его конфигурации после выполнении технологии КВП или ВВП с винтокрыла или вертолета исполнения ТРРВ-Х2+2 с ОПС-Х1 в соответствующий скоростной крылатый автожир или самолет с маршевой ОПС-Х1, передними и задними НВ, работающими соответственно на режимах их авторотации или при зафиксированных лопастях-крыльях НВ с синхронно втянутыми телескопическими их противовесами в обтекатели втулок однолопастных НВ, лопасти которых установлены при виде сверху в продолжение низко- и среднерасположенных консолей соответственно КОС и ВСК и вынесены наружу от плоскости симметрии в противоположные стороны, увеличивая площадь и несущую способность тандемных крыльев с ХОС, центропланы которых разнесены от толкающего винта вдоль оси симметрии, но и обратно, при этом в двухбалочной схеме межбалочные его секции трапециевидного ПГО, КОС и ВСК конструктивно объединены межкрыльевыми удобообтекаемыми разнесенными балками, выполненными с отклоненными их концами вверх, смонтированными передними и задними их концами под соответствующими консолями ПГО и ВСК и оснащенными с передних их концов оптическими гиростабилизированными фото-видео системами с обзорностью 270 градусов, левая из которых работает в инфракрасном диапазоне, причем в несущей его системе ТРРВ-Х2+2 при выполнении ВВП и зависания оба больших и оба меньших однолопастных НВ, работающих по тянущей схеме и имеющих плоскости вращения их лопастей, размещенные над секциями соответственно КОС и ВСК, выполнены без управления циклического изменения их шага и с жестким креплением их лопастей и профилированных противовесов, но и с возможностью изменения частоты их вращения и общего их шага, а также создания от всех НВ полной компенсации реактивных крутящих моментов при противоположном направлении вращения между НВ в каждой их группе, например, при виде сверху левые и правые лопасти больших с меньшими НВ вращаются без взаимного влияния и вредного влияния на толкающий винт соответственно по часовой и против часовой стрелки, при этом флюгерно-реверсивный трехлопастной толкающий винт в ОПС-Х1 выполнен с возможностью изменения частоты его вращения и общего его шага, а также его привода от вспомогательной силовой установки (ВСУ) на режимах выполнения ВВП и зависания и, как следствие, это позволит, создавая прямую и обратную горизонтальные его тяги, выполнять соответствующие перемещения в поступательном полете вдоль продольной его оси, причем внешние концевые части КОС и ВСК выполнены с возможностью изменения стояночной конфигурации БУВС с зафиксированными над ними лопастями НВ посредством их совместного поворота в плоскости хорды КОС и ВСК от внешних бортов соответствующих разнесенных балок так, что при их синхронном повороте вперед по направлению полета над последними и при фиксированном размещении лопастей НВ, располагающихся вдоль продольной оси соответствующих разнесенных балок, каждая из которых наравне с фюзеляжем снабжена внутриотсечными катапультными устройствами для транспортировки и пуска, например, управляемых авиационных ракет, обеспечивающих возможность использования как в мобильном, так и аэромобильном, в том числе и десантируемом его исполнении, при этом его электрическая силовая установка (ЭСУ), имеющая в системе ТРРВ-Х2+2 упомянутые четыре электромотора НВ, выполненные для удвоения времени зависания при ВВП в виде обратимых электромоторов-генераторов (ОЭМГ), вращательно связанных с НВ, авторотирующими от набегающего воздушного потока в полетной конфигурации крылатого автожира, вращают соответствующие ОЭМГ, работающие от внешнего источника энергии в режиме ветрогенераторов и подзаряжают быстро заряжаемые аккумуляторные батареи, расположенные в соответствующих отсеках разнесенных балок и фюзеляжа, выполнена по параллельно-последовательной гибридной технологии с системой электропривода, включающей все ОЭМГ, аккумуляторные перезаряжаемые батареи, преобразователь энергии с блоком управления силовой передачи, подключающим и отключающим ОЭМГ и роторно-поршневой двигатель (РПД) в ВСУ, переключающим генерирующую мощность и порядок подзарядки аккумуляторов и снабженной возможностью реализации двух способов работы с внутренним источником энергии - РПД, установленным с коробкой передач в заднем отсеке фюзеляжа-гондолы и имеющим трансмиссию для передачи его мощности только на толкающий винт или ее распределения на толкающий винт и на генератор для выработки генерирующей электроэнергии на крейсерских режимах горизонтального полета и совместной подзарядки аккумуляторов от генератора и всех ОЭМГ, работающих в режиме ветрогенераторов, обеспечивающих необходимые режимы полета и подзарядки, причем автономная система управления БУВС, включающая как автопилот для осуществления самостоятельного взлета после выбора и подтверждения маршрута, так и систему автоматического возврата в точку вылета, которая включится в том случае, если оператор не будет реагировать на запросы бортового компьютера, но и следящие системы, которые идентифицируют появившиеся на пути перелета препятствия и дадут команду на их автоматический облет, а затем обеспечат мягкую посадку в заданной точке.
Кроме того, в упомянутой ЭСУ БУВС передняя и задняя пары ОЭМГ имеют отношения их пиковых мощностей к суммарной пиковой электрической мощности ЭСУ соответственно 2/3 и 1/3, а взлетная мощность упомянутого РПД составляет 37,5% от общей мощности ЭСУ, причем упомянутые однолопастные широкохордовые НВ со ступенчатым профилем концевой части на одной третьей радиуса каждой с обратным сужением лопасти, имеющей концевую хорду лопасти в 2,0 раза больше ее корневой хорды и клиновидный профиль с углом α=10° и непрерывной нижней поверхностью, выполнен с верхним уступом-вырезом ромбовидной в плане формы, внешние выступающие стороны которой, имея вогнутые во внутрь задние кромки лопасти, создают в точке максимальной ее хорды (bmaxHB), совмещенной в уступе-вырезе с меньшей диагональю ромбовидной в плане формы, образующей как конфигурацию профиля ступеньки по ширине и глубине - это соответственно 1/2 от хорды bmaxHB и 2/3 от толщины cmaxHB, так и заостренную законцовку лопасти, имеющую параболическую переднюю кромку и обратной стреловидности заднюю кромку, причем упомянутые телескопические противовесы НВ имеют радиус (rтп) в выдвинутом и втянутом положении соответственно 30% от радиуса НВ и равновеликий радиусу обтекателя втулки НВ, имеющего диаметрально размещенные срезы в виде круговых сегментов, хорды которых равновелики корневым хордам НВ и противовеса, при этом каждый противовес, имеющий корневую и концевую хорды соответственно равновеликую и в 1,2 раза меньше корневой хорды НВ, выполнен с концевой частью в виде ответного сегмента окружности с диаметром равновеликим обтекателю втулки НВ, сопрягаемого при его втягивании со срезом кругового сегмента втулки, образуя удобообтекаемую ее округлую в плане форму, причем при выполнении КВП и винтокрылого горизонтального полета консоли КОС и ВСК, имеющие соответственно валовые закрылки и элевоны с корневыми хордами в  больше концевых хорд, которые при соответствующем их отклонении преобразуют прямые консоли КОС и ВСК в крылья ХОС с обратным сужением, создающим повышение несущей их способности на винтокрылых режимах полета при их обдуве в зоне максимальных индуктивных скоростей воздушного потока от однолопастных НВ, размещенных в полностью симметричной и синхронно-сбалансированной системе ТРРВ-Х2+2 и работающих совместно с маршевой тягой ОПС-Х1, продольная ось толкающего винта которого размещена по продольной линии, проходящей при виде сбоку выше центра его масс и, следовательно, уменьшает возможность возникновения кабрирующего момента, при этом в стояночной конфигурации БУВС для достижения минимально возможной высоты на колесном шасси лопасть толкающего винта, размещенная и зафиксированная вдоль плоскости симметрии, выполнена складывающейся, а вертикальное стреловидное оперение снабжено возможностью его складывания в одну любую из сторон от плоскости симметрии и его фиксированного размещения над соответствующей межбалочной секцией ВСК, а каждая стойка колесного шасси выполнена телескопической, причем в системе крыльев ХОС, смонтированных с положительным углом ϕ=2,5° поперечного V, первое КОС с ПГО и ВСК имеют 74,34% от общей площади системы крыльев ХОС с ПГО совместно с крыльями-лопастями НВ в самолетной полетной конфигурации, при этом передние и задние однолопастные НВ, закрепленные на выходных валах соответствующих упомянутых ОЭМГ, снабжены на самолетных режимах полета возможностью фиксированной установки их лопастей-крыльев таким образом, что разнесенные по вертикали над соответствующими надкрыльными пилонами левая и правая лопасти-крылья большего размаха передних НВ при виде спереди размещены на одном уровне и ниже соответствующих лопастей-крыльев меньшего размаха задних НВ, размещенных между собой на одном уровне, причем при выполнении ВВП для повышения безопасности на концах законцовок КОС имеются сигнальные огни и датчики сближения, предупреждающие звуковой сиреной о недопустимом приближении с посторонними объектами.
больше концевых хорд, которые при соответствующем их отклонении преобразуют прямые консоли КОС и ВСК в крылья ХОС с обратным сужением, создающим повышение несущей их способности на винтокрылых режимах полета при их обдуве в зоне максимальных индуктивных скоростей воздушного потока от однолопастных НВ, размещенных в полностью симметричной и синхронно-сбалансированной системе ТРРВ-Х2+2 и работающих совместно с маршевой тягой ОПС-Х1, продольная ось толкающего винта которого размещена по продольной линии, проходящей при виде сбоку выше центра его масс и, следовательно, уменьшает возможность возникновения кабрирующего момента, при этом в стояночной конфигурации БУВС для достижения минимально возможной высоты на колесном шасси лопасть толкающего винта, размещенная и зафиксированная вдоль плоскости симметрии, выполнена складывающейся, а вертикальное стреловидное оперение снабжено возможностью его складывания в одну любую из сторон от плоскости симметрии и его фиксированного размещения над соответствующей межбалочной секцией ВСК, а каждая стойка колесного шасси выполнена телескопической, причем в системе крыльев ХОС, смонтированных с положительным углом ϕ=2,5° поперечного V, первое КОС с ПГО и ВСК имеют 74,34% от общей площади системы крыльев ХОС с ПГО совместно с крыльями-лопастями НВ в самолетной полетной конфигурации, при этом передние и задние однолопастные НВ, закрепленные на выходных валах соответствующих упомянутых ОЭМГ, снабжены на самолетных режимах полета возможностью фиксированной установки их лопастей-крыльев таким образом, что разнесенные по вертикали над соответствующими надкрыльными пилонами левая и правая лопасти-крылья большего размаха передних НВ при виде спереди размещены на одном уровне и ниже соответствующих лопастей-крыльев меньшего размаха задних НВ, размещенных между собой на одном уровне, причем при выполнении ВВП для повышения безопасности на концах законцовок КОС имеются сигнальные огни и датчики сближения, предупреждающие звуковой сиреной о недопустимом приближении с посторонними объектами.
Кроме того, упомянутые клиновидные профили лопастей НВ и непрерывной верхней их поверхностью выполнены с нижним уступом-вырезом ромбовидной в плане формы, внешние выступающие стороны которой образуют упомянутый равнобедренный треугольник в плане, выполняющий на левых и правых НВ роль элеронов, снабженных сервоприводом и возможностью их синхронного отклонения в вертикальной плоскости таким образом, что при дифференциальном их отклонении вниз/вверх и вверх/вниз при прохождении лопастей НВ с противоположных правой/левой боковых сторон фюзеляжа, изменяют балансировку по крену соответственно влево и вправо при выполнении ВВП и зависания на вертолетных режимах полета.
Кроме того, упомянутый БУВС, имеющий как радиоканал закрытой связи с наземной мобильной платформой, выполненной в виде транспортно-заряжающей машины (ТЗМ), преимущественно с шестиколесным полноприводным движителем, так и радиолокационную станцию с передатчиком команд, оптико-электронную систему с двухканальным автоматом сопровождения цели и вычислительную систему с блоком автоматики многофункционального пульта управления, обеспечивающего при горизонтальном крейсерском полете самостоятельное нахождение ряда целей, идентификации их и принятие подтвержденного решения от оператора ТЗМ об уничтожении им выбранных, выполнен в виде перевозимого в походной конфигурации со сложенными концевыми частями крыльев при зафиксированных соответствующим образом лопастях соответствующих НВ в грузовом отсеке ТЗМ противотанкового ракетного комплекса (ПТРК), при этом грузовой отсек ТЗМ, снабженный как подъемным ложементом, имеющим возможность перемещения вверх-вниз для фиксированного в нем размещения фюзеляжа БУВС при втянутых упомянутых телескопических стоек его шасси в походно-заряжающей конфигурации, так и откидываемыми боковыми и задним бортами грузового отсека, задний из которых снабжен аппарелями и приводной лебедкой ТЗМ для затаскивания БУВС после вынужденной его посадки на землю с неизрасходованным боекомплектом, а не на горизонтальную взлетную площадку ТЗМ, увеличенную боковыми бортами кузова, для вертикального с ней взлета БУВС с боекомплектом, например, с противотанковыми управляемыми ракетами (ПТУР), размещенными в транспортно-пусковых контейнерах (ТПК), смонтированных по два ТПК с каждой стороны каждого Г-образного при виде сзади балочного держателя, закрепленного с внутреннего борта соответствующей разнесенной балки с возможностью замены пустого на заряженный балочный держатель с ТПК при нахождении БУВС в ложементе ТЗМ и размещении каждого его балочного держателя над позицией разгрузки/загрузки, обеспечивающей как автоматический съем и его опускание в соответствующий боковой магазин системы хранения и перезаряжания ТЗМ на позиции разгрузки, так и выполнения в последнем автоматического перезаряжания, но и последующего затем на позиции загрузки автоматического поднятия каждого заряженного балочного держателя с ТПК к разнесенной балке для его фиксации и закрепления на ней, причем в походном положении БУВС, который фиксируется на специальном подъемном ложементе ТЗМ, расположенном внутри грузового его отсека, имеющего автоматическое как открывание и закрывание боковых и заднего бортов с аппарелями (по необходимости) с помощью соответствующих приводных мини лебедок, при этом боковые борта в походном положении, выполненные Г-образными, верхние поворотные полки которых, являясь створками крыши, находящейся на одном уровне с крышей корпуса ТЗМ, закрывают сверху грузовой отсек, а при их открывании они автоматически поворачиваются, складываясь с бортом, обеспечивают горизонтальное расположение каждого бокового борта совместно с соответствующей створкой на выдвижных боковых упорах ТЗМ для выполнения вертикального взлета БУВС, жестко удерживаемого фиксаторами ложементов до тех пор, пока его несущая система достигнет необходимого уровня подъемной силы, синхронно и автоматически отключающего работу замков всех фиксаторов.
Кроме того, упомянутая гибридная ЭСУ, питаемая от внутреннего или внешнего источника энергии, обеспечивает два способа функционирования БУВС соответственно как автономного (для крейсерского полета) или как привязного БУВС (для энергозатратного вертикального взлета), связанного посредством автоматического узла стыковки/расстыковки отрывного его разъема через электроразъем бронированного кабеля с плавающей гусеничной ТЗМ, имеющей электроустановку, работающую от вала отбора мощности ее двигателя, и/или встроенный дизельный электроагрегат со средствами накопления и подвода электроэнергии гибким кабелем, размотка/намотка которого при вертикальном стартовом взлете обеспечивается барабаном со следящим электроприводом, установленным в энергетическом отсеке ТЗМ, причем при наборе БУВС стартовой высоты в 50 метров и отлете его вбок от ТЗМ с последующим его барражирующим круговым облетом ТЗМ и зависанием при срабатывании средств его целеуказания с переключением электропитания на внутренний его источник, то происходит расстыковка и вылет БУВС с отделением от его фюзеляжа гибкого кабеля посредством автоматического узла расстыковки, который имеет пиротолкатель, выбрасывающий парашют для его управляемого спуска на поверхность земли с соответствующей автоматической подмоткой кабеля на барабан ТЗМ.
Кроме того, упомянутый ТЗМ выполнен в виде стационарной заряжающей станции, смонтированной на стартово-приемной платформе, размещаемой на транспортном средстве, например, на автомобильном, железнодорожном или водном, обеспечивающем его установку, транспортирование и функционирование при соответствующем передвижении, при этом в корабельном противолодочном ракетном комплексе (КПЛРК) палубный БУВС, несущий авиационную противолодочную ракету АПР-3Э, оснащен опускаемой гидроакустической системой, состоящей из индикатора акустических сигналов и двух приемников для их приема от гидроакустического буя, их кодирования и передачи по восьмиканальной закрытой связи на корабль для обработки в реальном масштабе времени, и высокочувствительным магнитометром, смонтированными в удлиненном обтекателе вертикального оперения так, что в нижней передней его части установлен магниточувствительный элемент, работающий на расстоянии 30 м от водной поверхности, и снабжен по обе стороны от центра масс в нижней части каждой разнесенной балке швартующим устройством с рычагом ручного управления, имеющим на отклоняемой вниз/вверх телескопической штанге запорный механизм и устройство захвата, контактирующее с ячейками палубной решетки, обеспечивая возможность посадки на корабль при кренах до 25°.
Кроме того, упомянутая стартово-приемная платформа выполнена в виде автомобильного колесного прицепа, буксируемого, например бронеавтомобилем типа "Тигр-М", имеющим свои выдвижные модули вооружения с ПТУР типа "Корнет-Д".
Наличие вышеприведенных признаков позволяет в многоцелевом ракетном комплексе (МРК) исполнить его упомянутую БПМС в виде беспилотного ударного вертолета-самолета (БУВС), выполненного по аэродинамической схеме продольного триплана с близкорасположенным передним горизонтальным оперением (ПГО) к разнонаправленным крыльям Х-образной стреловидности (ХОС) в плане и концепции тандемного размещения разновеликих винтов (ТРРВ) в несущей системе ТРРВ-Х2+2, обеспечивающей выполнение технологии ВВП и КВП и включающей пару больших и пару меньших однолопастных НВ с профилированными телескопическими противовесами, смонтированных на пилонах соответственно на концах первого крыла обратной стреловидности (КОС), имеющего при отрицательном угле χ=-18° стреловидности обратное сужение, и второго стреловидного крыла (ВСК) с положительным углом χ=+18° стреловидности, снабженного по оси симметрии обтекателем с вертикальным оперением, имеющим руль направления и подкрыльный киль, и снабженного с задним расположением на конце короткого фюзеляжа одновинтовой пропульсивной системой (ОПС), смонтированной в кормовой мотогондоле с редуктором толкающего винта для создания маршевой тяги при скоростном горизонтальном полете, но и возможностью преобразования полетной его конфигурации после выполнении технологии КВП или ВВП с винтокрыла или вертолета исполнения ТРРВ-Х2+2 с ОПС-Х1 в соответствующий скоростной крылатый автожир или самолет с маршевой ОПС-Х1, передними и задними НВ, работающими соответственно на режимах их авторотации или при зафиксированных лопастях-крыльях НВ с синхронно втянутыми телескопическими их противовесами в обтекатели втулок однолопастных НВ, лопасти которых установлены при виде сверху в продолжение низко- и среднерасположенных консолей соответственно КОС и ВСК и вынесены наружу от плоскости симметрии в противоположные стороны, увеличивая площадь и несущую способность тандемных крыльев с ХОС, центропланы которых разнесены от толкающего винта вдоль оси симметрии, но и обратно, при этом в двухбалочной схеме межбалочные его секции трапециевидного ПГО, КОС и ВСК конструктивно объединены межкрыльевыми удобообтекаемыми разнесенными балками, выполненными с отклоненными их концами вверх, смонтированными передними и задними их концами под соответствующими консолями ПГО и ВСК и оснащенными с передних их концов оптическими гиростабилизированными фото-видео системами с обзорностью 270 градусов, левая из которых работает в инфракрасном диапазоне, причем в несущей его системе ТРРВ-Х2+2 при выполнении ВВП и зависания оба больших и оба меньших однолопастных НВ, работающих по тянущей схеме и имеющих плоскости вращения их лопастей, размещенные над секциями соответственно КОС и ВСК, выполнены без управления циклического изменения их шага и с жестким креплением их лопастей и профилированных противовесов, но и с возможностью изменения частоты их вращения и общего их шага, а также создания от всех НВ полной компенсации реактивных крутящих моментов при противоположном направлении вращения между НВ в каждой их группе, например, при виде сверху левые и правые лопасти больших с меньшими НВ вращаются без взаимного влияния и вредного влияния на толкающий винт соответственно по часовой и против часовой стрелки, при этом флюгерно-реверсивный трехлопастной толкающий винт в ОПС-Х1 выполнен с возможностью изменения частоты его вращения и общего его шага, а также его привода от вспомогательной силовой установки (ВСУ) на режимах выполнения ВВП и зависания и, как следствие, это позволит, создавая прямую и обратную горизонтальные его тяги, выполнять соответствующие перемещения в поступательном полете вдоль продольной его оси, причем внешние концевые части КОС и ВСК выполнены с возможностью изменения стояночной конфигурации БУВС с зафиксированными над ними лопастями НВ посредством их совместного поворота в плоскости хорды КОС и ВСК от внешних бортов соответствующих разнесенных балок так, что при их синхронном повороте вперед по направлению полета над последними и при фиксированном размещении лопастей НВ, располагающихся вдоль продольной оси соответствующих разнесенных балок, каждая из которых наравне с фюзеляжем снабжена внутриотсечными катапультными устройствами для транспортировки и пуска, например, управляемых авиационных ракет, обеспечивающих возможность использования как в мобильном, так и аэромобильном, в том числе и десантируемом его исполнении, при этом его электрическая силовая установка (ЭСУ), имеющая в системе ТРРВ-Х2+2 упомянутые четыре электромотора НВ, выполненные для удвоения времени зависания при ВВП в виде обратимых электромоторов-генераторов (ОЭМГ), вращательно связанных с НВ, авторотирующими от набегающего воздушного потока в полетной конфигурации крылатого автожира, вращают соответствующие ОЭМГ, работающие от внешнего источника энергии в режиме ветрогенераторов и подзаряжают быстро заряжаемые аккумуляторные батареи, расположенные в соответствующих отсеках разнесенных балок и фюзеляжа, выполнена по параллельно-последовательной гибридной технологии с системой электропривода, включающей все ОЭМГ, аккумуляторные перезаряжаемые батареи, преобразователь энергии с блоком управления силовой передачи, подключающим и отключающим ОЭМГ и роторно-поршневой двигатель (РПД) в ВСУ, переключающим генерирующую мощность и порядок подзарядки аккумуляторов и снабженной возможностью реализации двух способов работы с внутренним источником энергии - РПД, установленным с коробкой передач в заднем отсеке фюзеляжа-гондолы и имеющим трансмиссию для передачи его мощности только на толкающий винт или ее распределения на толкающий винт и на генератор для выработки генерирующей электроэнергии на крейсерских режимах горизонтального полета и совместной подзарядки аккумуляторов от генератора и всех ОЭМГ, работающих в режиме ветрогенераторов, обеспечивающих необходимые режимы полета и подзарядки, причем автономная система управления БУВС, включающая как автопилот для осуществления самостоятельного взлета после выбора и подтверждения маршрута, так и систему автоматического возврата в точку вылета, которая включится в том случае, если оператор не будет реагировать на запросы бортового компьютера, но и следящие системы, которые идентифицируют появившиеся на пути перелета препятствия и дадут команду на их автоматический облет, а затем обеспечат мягкую посадку в заданной точке. Все это позволит повысить скорость и дальность полета БУВС с однолопастными НВ, которые при выполнении операций с вертикальным подъемом грузов весьма перспективны в качестве останавливаемых и не убираемых в полете винтов-крыльев, что исключит наличие узлов переворота их лопастей (для организации симметричных поверхностей крыла относительно продольной оси) или весьма конструктивно сложных систем их складывания и уборки НВ, что упростит возможность преобразования его полетной конфигурации с винтокрыла или вертолета исполнения ТРРВ-Х2+2 в соответствующий скоростной крылатый автожир или самолет с маршевой ОПС-Х1. Кроме того, мобильное исполнение БУВС для МРК и возможность его перевозки по земле в грузовом отсеке ТЗМ позволяет, использую его энергоустановку, выполнить энергозатратный вертикальный взлет БУВС как привязного и достичь времени полета до 3,2 часа и скорости 425 км/ч в самолетной конфигурации. Применение однолопастных НВ также позволит достичь более высокую аэродинамическую эффективность, несмотря на вредное сопротивление профилированных балансировочных противовесов. Для предотвращения нежелательных вибраций однолопастные НВ работают с большой окружной скоростью. Поэтому основной режим работы однолопастных НВ - это ВВП и зависание. В случае появления косого обдува тяга НВ изменяется циклически. Поэтому жесткое крепление лопасти улучшает управляемость, особенно однолопастных НВ. В синхронизированной ТРРВ-Х2+2 моменты Мкрен и Мпрод от каждой пары однолопастных НВ при передаче на фюзеляж через крылья ХОС взаимно уничтожаются. Поэтому коэффициент аэродинамической выгодности однолопастных НВ в ТРРВ-Х2+2 будет выше, чем у классического мультикоптера с двухлопастными НВ. Что позволит уменьшить вес планера и улучшить весовую отдачу в сравнении с электрическим вертолетом многовинтовой схемы. Более того, все это позволит также в сравнении с традиционным самолетом монопланной схемы повысить маневренность на малых скоростях полета и при переходных маневрах, но и снизить скорость сваливания за сет увеличения в 1,2 раза коэффициент поднятия ПГО с крыльями ХОС, создающими совместно с лопастями-крыльями НВ преимущество в производстве подъемной силы при выполнении крейсерских режимов полета БУВС с гибридной ЭСУ.
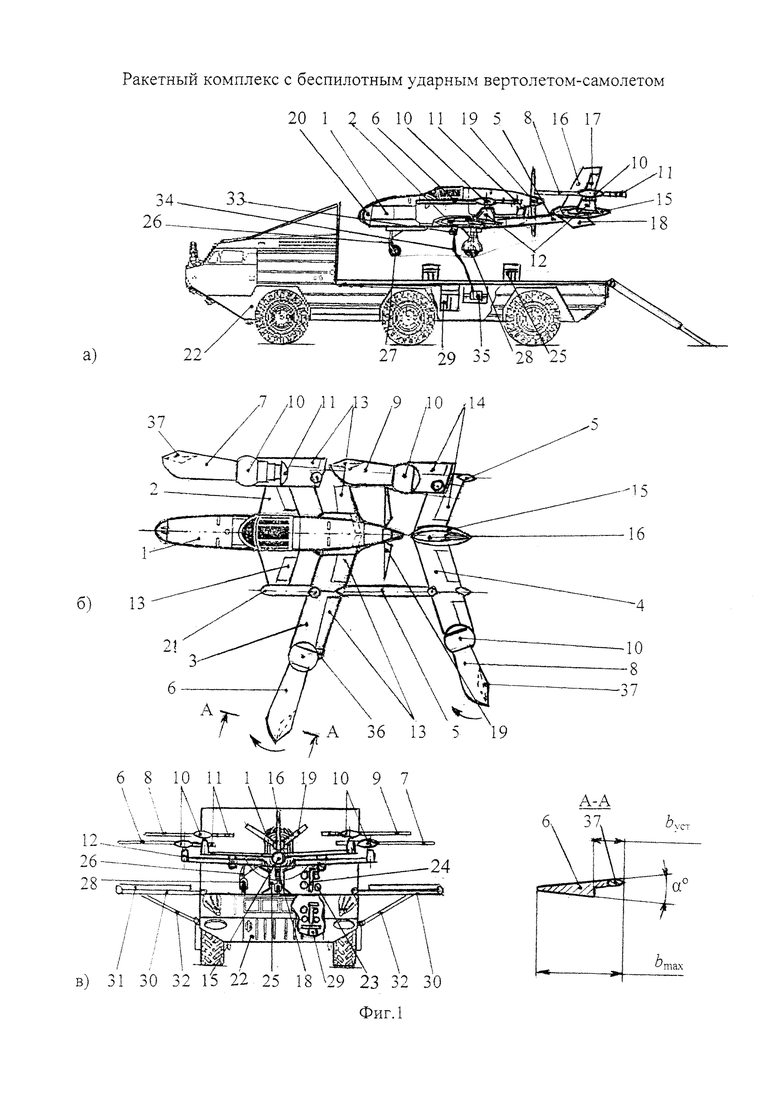
Предлагаемое изобретение самоходного МРК с БУВС, имеющего ПГО, большие и меньшие НВ и задний толкающий винт соответственно на концах КОС и ВСК в системе крыльев ХОС и конце фюзеляжа-гондолы, представлено на фиг. 1 с вариантами использования его БУВС исполнения ТРРВ-Х2+2 в составе ПТРК на базе ТЗМ.
На фиг. 1 изображен МРК с ТЗМ на общих видах сбоку, сверху и сзади соответственно а), б) и в) при использовании БУВС и с условным размещением на виде сверху со сложенными правыми его секциями КОС и ВСК с однолопастными НВ и их выдвинутыми противовесами, размещенными с внешних бортов разнесенных балок:
а) изображен ТЗМ с задним бортом и аппарелями (не обозначено) при отлете от него БУВС в полетной конфигурации вертолета с несущей системой, включающей на надкрыльных пилонах КОС и ВСК соответствующие НВ с толкающим винтом;
б) изображен БУВС в полетной конфигурации автожира или самолета с движительной и несущей системами соответственно с задним толкающим винтом, создающим маршевую тягу, и с авторотирующими НВ в ТРРВ-Х2+2 или зафиксированными лопастями-крыльями НВ на пилонах, смонтированных на законцовках крыльев ХОС, консоли которых жестко связаны с ПГО и между собой разнесенными балами;
в) изображен самоходный МРК в стартовой конфигурации с БУВС на ложементе при втянутых телескопических стоек его шасси и с разложенными консолями КОС и ВСК с соответствующими НВ для его вертикального взлета с грузового отсека ТЗМ, имеющего горизонтальную взлетную площадку, увеличенную боковыми бортами его кузова после их раскладывания и наклоном заднего борта с аппарелями (не показано).
Самоходный МРК на базе ТЗМ с гибридным БУВС исполнения ТРРВ-Х2+2, выполненным по схеме продольного триплана и двухбалочной концепции с фюзеляжем-гондолой 1, близкорасположенным ПГО 2, низко- и среднерасположенными тандемными КОС 3 и ВСК 4, образующими крылья ХОС, консоли ПГО и последних связаны межкрыльевыми подкрыльными разнесенными балками 5. Большие левый 6 и правый 7 и меньшие левые 8 и правые 9 однолопастные НВ, вращательно связанные с соответствующими ОЭМГ, имеют обтекатели втулок 10, профилированные телескопические противовесы 11, смонтированы на надкрыльных пилонах 12 соответственно на концах прямых КОС 3 и ВСК 4, имеющих соответственно закрылки 13 и элевоны 14, при отклонении которых преобразуют их консоли с обратным сужением. По оси симметрии на ВСК имеется обтекатель 15 с вертикальным оперением 16, имеющим руль направления 17 и подкрыльный киль 18. На конце фюзеляжа-гондолы 1 установлен толкающий винт 19, вращательно связанный валом трансмиссии с РПД (на фиг. 1 не показаны). Внешние секции КОС 2 и ВСК 3 выполнены с возможностью их поворота вперед по направлению полета в плоскости хорды КОС и ВСК совместно с зафиксированными над ними лопастями больших 6-7 и меньших 8-9 НВ от внешних бортов соответствующих разнесенных балок 5 и их последующего размещения вдоль оси последних. Радиолокационная станция 20 с передатчиком команд и оптико-электронная система с двухканальным автоматом 21 сопровождения цели смонтированы соответственно в носовой части фюзеляжа 1 и спереди разнесенных балок 5. Все большие 6-7 и меньшие 8-9 однолопастные НВ выполнены с возможностью фиксации их лопастей вдоль соответствующих консолей крыльев ХОС и увеличения их несущей способности в самолетной крейсерской полетной конфигурации (см. фиг. 1 в НВ 7-9 правой группы с их противовесами 11 условно показаны в походном положении).
Единая ЭСУ, выполненная по параллельно-последовательной гибридной технологии силового привода, имеет возможность ее питания от внутреннего или внешнего источника энергии, размещенные соответственно (на фиг. 1 не показаны) в энергетическом отсеке фюзеляжа 1 БУВС или ТЗМ 22, имеющего шестиколесный полноприводный движитель. При этом в полетной конфигурации крылатого автожира с передними 6-7 и задними 8-9 НВ, авторотирующими от набегающего воздушного потока, вращают соответствующие ОЭМГ (на фиг. 1 не показаны), работающие от внешнего источника энергии в режиме ветрогенераторов и подзаряжают блоки быстро заряжаемых аккумуляторных батарей БУВС, расположенных в энергоотсеке фюзеляжа 1. В задней части фюзеляжа 1 имеется двигательный отсек, в котором размещена ВСУ с РПД, установленный с коробкой передач и трансмиссией для передачи его мощности только на толкающий винт 19 или ее распределения и на толкающий винт 19, и на генератор для выработки электроэнергии на крейсерских режимах горизонтального полета и совместной подзарядки аккумуляторов от генератора и всех ОЭМГ, работающих в режиме ветрогенераторов, обеспечивающих необходимые режимы полета и подзарядки. Для установки целевой нагрузки, например, ПТУР типа "Корнет-Д" в ТПК смонтированы по два ТПК 23 с каждой стороны каждого Г-образного при виде сзади балочного держателя 24 (см. рис. 1 в показан правый), закрепленного с внутренней стороны соответствующей разнесенной балки 5 с возможностью автоматической замены пустого на заполненный балочный держатель 24 с ТПК 23 при нахождении БУВС в ложементе 25 ТЗМ 22 и заряжающей конфигурации при втянутых телескопических опорах 26 шасси с передним 27 и задними 28 колесами, и размещения каждого балочного держателя 24 в позиции разгрузки/загрузки, включая операции как автоматического съема и опускания каждого пустого балочного держателя 24 в боковой магазин 29 ТЗМ 22 на позиции разгрузки, так и последующее автоматического их перезаряжания, но и последующего затем на позиции загрузки автоматического поднятия каждого заряженного балочного держателя 24 с ТПК 23 к разнесенной балке 5 для его фиксации и закрепления на ней. При этом боковые борта 30 кузова ТЗМ 22 в походном положении, выполненные Г-образными, верхние поворотные полки 31 которых, являясь створками 31 крыши, находящейся на одном уровне с крышей корпуса ТЗМ 22, закрывают сверху грузовой отсек, а при их открывании они автоматически поворачиваются, складываясь с бортом 30, обеспечивают горизонтальное расположение каждого бокового борта 30 совместно с соответствующей створкой 31 на выдвижных боковых упорах 32 ТЗМ 22. Для удваивания времени зависания привязной БУВС, связанный посредством автоматического узла 33 стыковки/расстыковки отрывного его разъема через электроразъем гибкого кабеля 34 (см. рис. la) с пусковой ТЗМ 22, имеющей подвод дополнительной электроэнергии кабелем 34, размотка/намотка которого при вертикальном стартовом взлете обеспечивается барабаном 35 со следящим электроприводом, установленным в энергетическом отсеке ТЗМ 22. При наборе стартовой высоты в 30 метров и отлете БУВС вбок от ТЗМ 22 с последующим зависанием и переключением электропитания на внутренний его источник при нахождении цели, то происходит расстыковка и отделение гибкого кабеля 34 от фюзеляжа 1 БУВС, который после подтверждения маршрута выполняет полет при опускании кабеля 34 на парашюте (на фиг. 1 не показаны) с намоткой его на барабан 35. При выполнении ВВП для повышения безопасности на законцовках КОС 2 имеются сигнальные огни и датчики сближения 36, предупреждающие звуковой сиреной о недопустимом приближении с посторонними объектами. Автономные системы автопилота БУВС осуществят самостоятельный взлет после выбора и подтверждения маршрута, идентифицируют появившиеся на пути следования препятствия и дадут команду на их облет, а затем обеспечат мягкую посадку в заданной точке. Кроме того, БУВС имеет систему автоматического возврата в точку вылета, которая включится в том случае, если оператор не будет реагировать на запросы компьютера. После приземления на ложемент 25 консоли крыльев 2-3 складываются с лопастями НВ 6-9 в походную конфигурацию БУВС для его перевозки в ТЗМ 22 с закрытыми бортами по шоссе или земле.
Управление гибридным БУВС обеспечивается наподобие управлением мультикоптером, а именно изменение высоты полета, поворот и, особенно, управление по крену и тангажу обеспечивается исключительно за счет уменьшения или увеличения оборотов соответствующих ОЭМГ с НВ передней 6-7 и задней 8-9 групп. При крейсерском полете как крылатого автожира подъемная сила создается крыльями 2-3 ХОС и авторотирующими НВ 6-7 и 8-9, горизонтальная тяга - задним винтом 19, на режиме висения только винтами передней 11-12 и задней 13-14, 16 групп, на режиме перехода - крыльями 2-3 с НВ 6-7 и 8-9. При переходе с винтокрылого режима полета на режим висения и если возникает момент тангажа (Mz), то он парируется отклонением элевонов 14 ВСК 3, создающих, работая в зоне обдува заднего винта 19, парирующую силу. В четырехвинтовой несущей схеме НВ передней 6-7 и задней 8-9 групп, имея взаимно противоположное их вращение между левой и правой групп (см. фиг. 16), компенсируют реактивные их моменты. Для посадки БУВС на ложемент 25 ТЗМ 22 используются передние 27 и задние 28 колеса, убирающегося трехопорного шасси. При выполнении ВВП и зависания продольное управление БУВС осуществляется уменьшением или увеличением числа оборотов винтов передней 6-7 и задней 8-9 групп, путевое управление - изменением крутящих моментов НВ, имеющих противоположное направление вращения левых и правых НВ диагонально расположенных винтов, например, 6-9 и 7-8. Поперечное управление обеспечивается изменением числа оборотов левых 6-8 и правых 7-9 НВ или дифференциальным отклонением серво-элеронов 37 левых 6-8 и правых 7-9 НВ. После вертикального взлета и набора высоты для перехода с режима полета крылатого автожира в полетную конфигурацию самолета лопасти НВ 6-7 и 8-9 синхронно фиксируются вдоль соответствующих консолей крыльев 2-3 ХОС. При этом путевое управление обеспечивается рулем 17 вертикального оперения 16, продольное и поперечное управление осуществляется синфазным и дифференциальным отклонением элевонов 14 ВСК 3 соответственно.
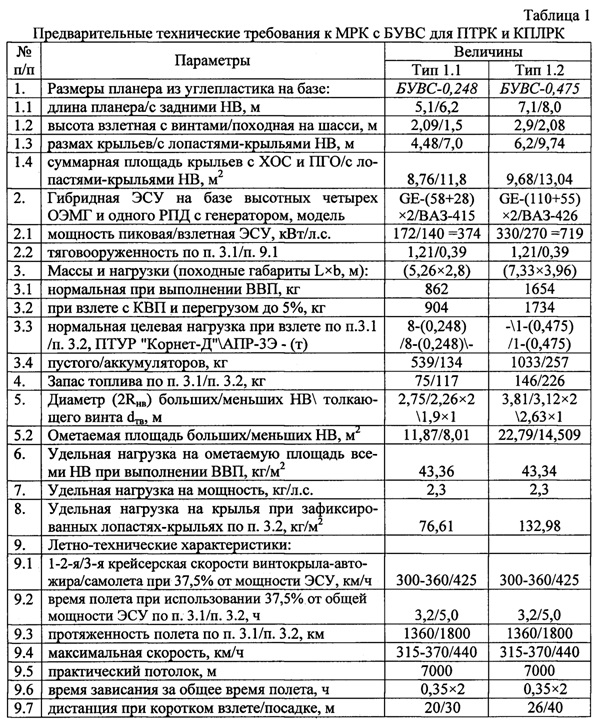
Таким образом, освоение БУВС с улучшенными тактико-техническими показателями для МРК в современных условиях - задача многоплановая и не является технически неразрешимой. Поэтому дальнейшие исследования в процессе развития широкого семейства БУВС, реализуемого с отечественными РПД типа "ВАЗ", то самой жизнью будет продиктована задача освоения и палубного БУВС-0,475 (см. табл. 1).
| название | год | авторы | номер документа |
|---|---|---|---|
| СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ-АМФИБИЯ | 2017 |
|
RU2655249C1 |
| МНОГОВИНТОВОЙ СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2658736C1 |
| БЕСПИЛОТНЫЙ ТЯЖЕЛЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2667433C2 |
| СКОРОСТНОЙ ГИБРИДНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2652863C1 |
| БЕСПИЛОТНЫЙ ВЫСОКОСКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2653953C1 |
| БЕСПИЛОТНЫЙ САМОЛЕТ-ВЕРТОЛЕТ-РАКЕТОНОСЕЦ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2018 |
|
RU2699514C1 |
| БЕСПИЛОТНЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2664024C2 |
| МНОГОЦЕЛЕВОЙ ПАЛУБНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2652861C1 |
| ПРОТИВОЛОДОЧНЫЙ РАКЕТНЫЙ КОМПЛЕКС С АВТОНОМНЫМ РЕАКТИВНЫМ САМОЛЕТОМ-НОСИТЕЛЕМ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2017 |
|
RU2699616C2 |
| БЕСПИЛОТНЫЙ ПАЛУБНЫЙ ПРЕОБРАЗУЕМЫЙ ВИНТОКРЫЛ | 2017 |
|
RU2661277C1 |
Изобретение относится к средствам военной техники и может быть использовано в конструкции автономных винтокрылых модулей вооружения. Авиационный ракетный комплекс с беспилотным ударным вертолетом-самолетом включает платформу, содержащую средства базирования со стартовой станцией, энергетическую установку и блок управления полетом беспилотной многовинтовой системой (БПМС). БПМС представляет собой беспилотный ударный вертолет-самолет, выполненный по аэродинамической схеме продольного триплана с близкорасположенным передним горизонтальным оперением, разнонаправленными крыльями Х-образной стреловидности и концепции тандемного размещения разновеликих винтов. Несущие винты с профилированными телескопическими противовесами смонтированы на пилонах крыльев. Одновинтовая пропульсивная система смонтирована в кормовой мотогондоле с редуктором толкающего винта. Вертолет-самолет имеет возможность преобразования полетной конфигурации с винтокрыла или вертолета в скоростной крылатый автожир или самолет. Обеспечивается повышение скорости и дальности полета, упрощение продольно-поперечной управляемости при вертикальном взлете, посадке и висении. 6 з.п. ф-лы, 1 табл., 1 ил.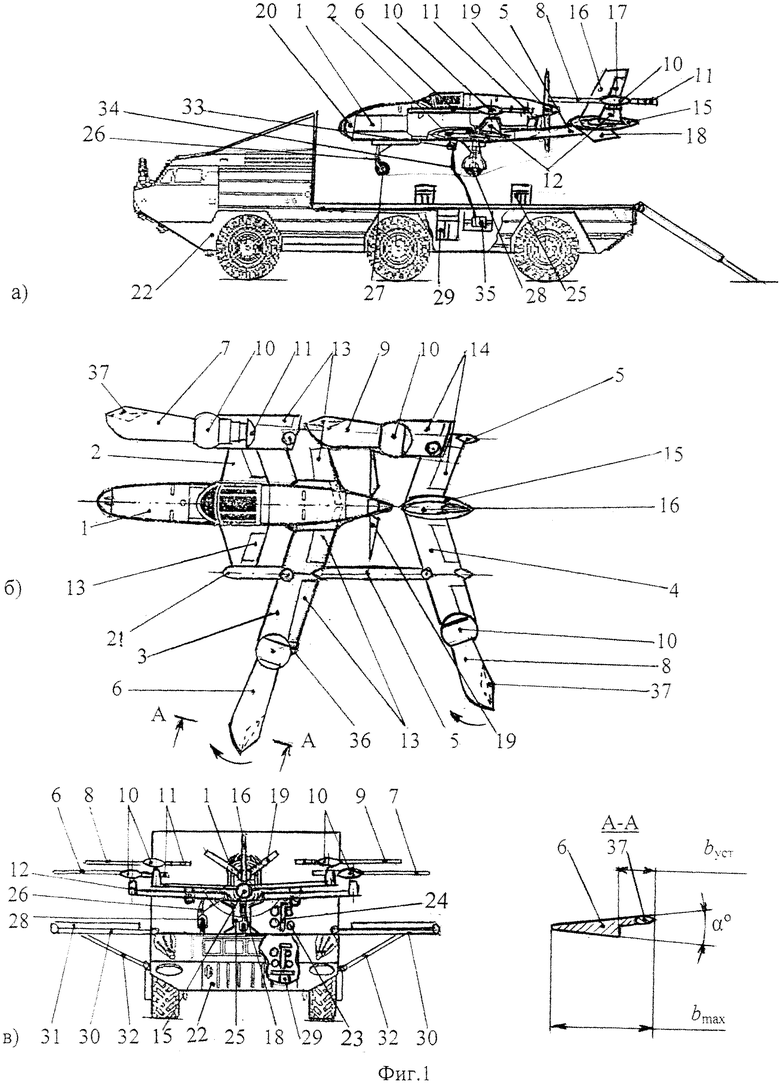
1. Авиационный ракетный комплекс с беспилотным ударным вертолетом-самолетом, включающий платформу, содержащую средства базирования со стартовой станцией, энергетическую установку и блок управления полетом беспилотной многовинтовой системой (БПМС), отличающийся тем, что упомянутая БПМС представляет собой беспилотный ударный вертолет-самолет (БУВС), выполненный по аэродинамической схеме продольного триплана с близкорасположенным передним горизонтальным оперением (ПГО) к разнонаправленным крыльям Х-образной стреловидности (ХОС) в плане и концепции тандемного размещения разновеликих винтов (ТРРВ) в несущей системе ТРРВ-Х2+2, обеспечивающей выполнение технологии вертикального и короткого взлета/посадки (ВВП и КВП) и включающей пару больших и пару меньших однолопастных несущих винтов (НВ) с профилированными телескопическими противовесами, смонтированных на пилонах соответственно на концах первого крыла обратной стреловидности (КОС), имеющего при отрицательном угле χ=-18° стреловидности обратное сужение, и второго стреловидного крыла (ВСК) с положительным углом χ=+18° стреловидности, снабженного по оси симметрии обтекателем с вертикальным оперением, имеющим руль направления и подкрыльный киль, и снабженный с задним расположением на конце короткого фюзеляжа одновинтовой пропульсивной системой (ОПС), смонтированной в кормовой мотогондоле с редуктором толкающего винта для создания маршевой тяги при скоростном горизонтальном полете, но и возможностью преобразования полетной его конфигурации после выполнении технологии КВП или ВВП с винтокрыла или вертолета исполнения ТРРВ-Х2+2 с ОПС-Х1 в соответствующий скоростной крылатый автожир или самолет с маршевой ОПС-Х1, передними и задними НВ, работающими соответственно на режимах их авторотации или при зафиксированных лопастях-крыльях НВ с синхронно втянутыми телескопическими их противовесами в обтекатели втулок однолопастных НВ, лопасти которых установлены при виде сверху в продолжение низко- и среднерасположенных консолей соответственно КОС и ВСК и вынесены наружу от плоскости симметрии в противоположные стороны, увеличивая площадь и несущую способность тандемных крыльев с ХОС, центропланы которых разнесены от толкающего винта вдоль оси симметрии, но и обратно, при этом в двухбалочной схеме межбалочные его секции трапециевидного ПГО, КОС и ВСК конструктивно объединены межкрыльевыми удобообтекаемыми разнесенными балками, выполненными с отклоненными их концами вверх, смонтированными передними и задними их концами под соответствующими консолями ПГО и ВСК и оснащенными с передних их концов оптическими гиростабилизированными фото-видео системами с обзорностью 270 градусов, левая из которых работает в инфракрасном диапазоне, причем в несущей его системе ТРРВ-Х2+2 при выполнении ВВП и зависании оба больших и оба меньших однолопастных НВ, работающих по тянущей схеме и имеющих плоскости вращения их лопастей, размещенные над секциями соответственно КОС и ВСК, выполнены без управления циклического изменения их шага и с жестким креплением их лопастей и профилированных противовесов, но и с возможностью изменения частоты их вращения и общего их шага, а также создания от всех НВ полной компенсации реактивных крутящих моментов при противоположном направлении вращения между НВ в каждой их группе, например, при виде сверху левые и правые лопасти больших с меньшими НВ вращаются без взаимного влияния и вредного влияния на толкающий винт соответственно по часовой и против часовой стрелки, при этом флюгерно-реверсивный трехлопастной толкающий винт в ОПС-Х1 выполнен с возможностью изменения частоты его вращения и общего его шага, а также его привода от вспомогательной силовой установки (В СУ) на режимах выполнения ВВП и зависания и, как следствие, это позволит, создавая прямую и обратную горизонтальные его тяги, выполнять соответствующие перемещения в поступательном полете вдоль продольной его оси, причем внешние концевые части КОС и ВСК выполнены с возможностью изменения стояночной конфигурации БУВС с зафиксированными над ними лопастями НВ посредством их совместного поворота в плоскости хорды КОС и ВСК от внешних бортов соответствующих разнесенных балок так, что при их синхронном повороте вперед по направлению полета над последними и при фиксированном размещении лопастей НВ, располагающихся вдоль продольной оси соответствующих разнесенных балок, каждая из которых наравне с фюзеляжем снабжена внутриотсечными катапультными устройствами для транспортировки и пуска, например, управляемых авиационных ракет, обеспечивающих возможность использования как в мобильном, так и аэромобильном, в том числе и десантируемом его исполнении, при этом его электрическая силовая установка (ЭСУ), имеющая в системе ТРРВ-Х2+2 упомянутые четыре электромотора НВ, выполненные для удвоения времени зависания при ВВП в виде обратимых электромоторов-генераторов (ОЭМГ), вращательно связанных с НВ, авторотирующими от набегающего воздушного потока в полетной конфигурации крылатого автожира, вращают соответствующие ОЭМГ, работающие от внешнего источника энергии в режиме ветрогенераторов и подзаряжают быстро заряжаемые аккумуляторные батареи, расположенные в соответствующих отсеках разнесенных балок и фюзеляжа, выполнена по параллельно-последовательной гибридной технологии с системой электропривода, включающей все ОЭМГ, аккумуляторные перезаряжаемые батареи, преобразователь энергии с блоком управления силовой передачи, подключающим и отключающим ОЭМГ и роторно-поршневой двигатель (РПД) в ВСУ, переключающим генерирующую мощность и порядок подзарядки аккумуляторов и снабженной возможностью реализации двух способов работы с внутренним источником энергии - РПД, установленным с коробкой передач в заднем отсеке фюзеляжа-гондолы и имеющим трансмиссию для передачи его мощности только на толкающий винт или ее распределения на толкающий винт и на генератор для выработки генерирующей электроэнергии на крейсерских режимах горизонтального полета и совместной подзарядки аккумуляторов от генератора и всех ОЭМГ, работающих в режиме ветрогенераторов, обеспечивающих необходимые режимы полета и подзарядки, причем автономная система управления БУВС, включающая как автопилот для осуществления самостоятельного взлета после выбора и подтверждения маршрута, так и систему автоматического возврата в точку вылета, которая включится в том случае, если оператор не будет реагировать на запросы бортового компьютера, но и следящие системы, которые идентифицируют появившиеся на пути перелета препятствия и дадут команду на их автоматический облет, а затем обеспечат мягкую посадку в заданной точке.
2. Авиационный ракетный комплекс с беспилотным ударным вертолетом-самолетом по п. 1, отличающийся тем, что в упомянутой ЭСУ БУВС передняя и задняя пары ОЭМГ имеют отношения их пиковых мощностей к суммарной пиковой электрической мощности ЭСУ соответственно 2/3 и 1/3, а взлетная мощность упомянутого РПД составляет 37,5% от общей мощности ЭСУ, причем упомянутые однолопастные широкохордовые НВ со ступенчатым профилем концевой части на одной третьей радиуса каждой с обратным сужением лопасти, имеющей концевую хорду лопасти в 2,0 раза больше ее корневой хорды и клиновидный профиль с углом α=10° и непрерывной нижней поверхностью, выполнен с верхним уступом-вырезом ромбовидной в плане формы, внешние выступающие стороны которой, имея вогнутые вовнутрь задние кромки лопасти, создают в точке максимальной ее хорды (bmaxHB), совмещенной в уступе-вырезе с меньшей диагональю ромбовидной в плане формы, образующей как конфигурацию профиля ступеньки по ширине и глубине - это соответственно 1/2 от хорды bmaxHB и 2/3 от толщины cmaxHB, так и заостренную законцовку лопасти, имеющую параболическую переднюю кромку и обратной стреловидности заднюю кромку, причем упомянутые телескопические противовесы НВ имеют радиус (rтп) в выдвинутом и втянутом положении соответственно 30% от радиуса НВ и равновеликий радиусу обтекателя втулки НВ, имеющего диаметрально размещенные срезы в виде круговых сегментов, хорды которых равновелики корневым хордам НВ и противовеса, при этом каждый противовес, имеющий корневую и концевую хорды, соответственно равновеликую и в 1,2 раза меньше корневой хорды НВ, выполнен с концевой частью в виде ответного сегмента окружности с диаметром, равновеликим обтекателю втулки НВ, сопрягаемого при его втягивании со срезом кругового сегмента втулки, образуя удобообтекаемую ее округлую в плане форму, причем при выполнении КВП и винтокрылого горизонтального полета консоли КОС и ВСК, имеющие соответственно валовые закрылки и элевоны с корневыми хордами в  больше концевых хорд, которые при соответствующем их отклонении преобразуют прямые консоли КОС и ВСК в крылья ХОС с обратным сужением, создающим повышение несущей их способности на винтокрылых режимах полета при их обдуве в зоне максимальных индуктивных скоростей воздушного потока от однолопастных НВ, размещенных в полностью симметричной и синхронно-сбалансированной системе ТРРВ-Х2+2 и работающих совместно с маршевой тягой ОПС-Х1, продольная ось толкающего винта которого размещена по продольной линии, проходящей при виде сбоку выше центра его масс и, следовательно, уменьшает возможность возникновения кабрирующего момента, при этом в стояночной конфигурации БУВС для достижения минимально возможной высоты на колесном шасси лопасть толкающего винта, размещенная и зафиксированная вдоль плоскости симметрии, выполнена складывающейся, а вертикальное стреловидное оперение снабжено возможностью его складывания в одну любую из сторон от плоскости симметрии и его фиксированного размещения над соответствующей межбалочной секцией ВСК, а каждая стойка колесного шасси выполнена телескопической, причем в системе крыльев ХОС, смонтированных с положительным углом ϕ=2,5° поперечного V, первое КОС с ПГО и ВСК имеют 74,34% от общей площади системы крыльев ХОС с ПГО совместно с крыльями-лопастями НВ в самолетной полетной конфигурации, при этом передние и задние однолопастные НВ, закрепленные на выходных валах соответствующих упомянутых ОЭМГ, снабжены на самолетных режимах полета возможностью фиксированной установки их лопастей-крыльев таким образом, что разнесенные по вертикали над соответствующими надкрыльными пилонами левая и правая лопасти-крылья большего размаха передних НВ при виде спереди размещены на одном уровне и ниже соответствующих лопастей-крыльев меньшего размаха задних НВ, размещенных между собой на одном уровне, причем при выполнении ВВП для повышения безопасности на концах законцовок КОС имеются сигнальные огни и датчики сближения, предупреждающие звуковой сиреной о недопустимом приближении с посторонними объектами.
больше концевых хорд, которые при соответствующем их отклонении преобразуют прямые консоли КОС и ВСК в крылья ХОС с обратным сужением, создающим повышение несущей их способности на винтокрылых режимах полета при их обдуве в зоне максимальных индуктивных скоростей воздушного потока от однолопастных НВ, размещенных в полностью симметричной и синхронно-сбалансированной системе ТРРВ-Х2+2 и работающих совместно с маршевой тягой ОПС-Х1, продольная ось толкающего винта которого размещена по продольной линии, проходящей при виде сбоку выше центра его масс и, следовательно, уменьшает возможность возникновения кабрирующего момента, при этом в стояночной конфигурации БУВС для достижения минимально возможной высоты на колесном шасси лопасть толкающего винта, размещенная и зафиксированная вдоль плоскости симметрии, выполнена складывающейся, а вертикальное стреловидное оперение снабжено возможностью его складывания в одну любую из сторон от плоскости симметрии и его фиксированного размещения над соответствующей межбалочной секцией ВСК, а каждая стойка колесного шасси выполнена телескопической, причем в системе крыльев ХОС, смонтированных с положительным углом ϕ=2,5° поперечного V, первое КОС с ПГО и ВСК имеют 74,34% от общей площади системы крыльев ХОС с ПГО совместно с крыльями-лопастями НВ в самолетной полетной конфигурации, при этом передние и задние однолопастные НВ, закрепленные на выходных валах соответствующих упомянутых ОЭМГ, снабжены на самолетных режимах полета возможностью фиксированной установки их лопастей-крыльев таким образом, что разнесенные по вертикали над соответствующими надкрыльными пилонами левая и правая лопасти-крылья большего размаха передних НВ при виде спереди размещены на одном уровне и ниже соответствующих лопастей-крыльев меньшего размаха задних НВ, размещенных между собой на одном уровне, причем при выполнении ВВП для повышения безопасности на концах законцовок КОС имеются сигнальные огни и датчики сближения, предупреждающие звуковой сиреной о недопустимом приближении с посторонними объектами.
3. Авиационный ракетный комплекс с беспилотным ударным вертолетом-самолетом по п. 2, отличающийся тем, что упомянутые клиновидные профили лопастей НВ и непрерывной верхней их поверхности выполнены с нижним уступом-вырезом ромбовидной в плане формы, внешние выступающие стороны которой образуют упомянутый равнобедренный треугольник в плане, выполняющий на левых и правых НВ роль элеронов, снабженных сервоприводом и возможностью их синхронного отклонения в вертикальной плоскости таким образом, что при дифференциальном их отклонении вниз/вверх и вверх/вниз при прохождении лопастей НВ с противоположных правой/левой боковых сторон фюзеляжа, изменяют балансировку по крену соответственно влево и вправо при выполнении ВВП и зависании на вертолетных режимах полета.
4. Авиационный ракетный комплекс с беспилотным ударным вертолетом-самолетом по любому из пп. 1-3, отличающийся тем, что упомянутый БУВС, имеющий как радиоканал закрытой связи с наземной мобильной платформой, выполненной в виде транспортно-заряжающей машины (ТЗМ), преимущественно с шестиколесным полноприводным движителем, так и радиолокационную станцию с передатчиком команд, оптико-электронную систему с двухканальным автоматом сопровождения цели и вычислительную систему с блоком автоматики многофункционального пульта управления, обеспечивающего при горизонтальном крейсерском полете самостоятельное нахождение ряда целей, идентификации их и принятие подтвержденного решения от оператора ТЗМ об уничтожении им выбранных, выполнен в виде перевозимого в походной конфигурации со сложенными концевыми частями крыльев при зафиксированных соответствующим образом лопастях соответствующих НВ в грузовом отсеке ТЗМ противотанкового ракетного комплекса (ПТРК), при этом грузовой отсек ТЗМ, снабженный как подъемным ложементом, имеющим возможность перемещения вверх-вниз для фиксированного в нем размещения фюзеляжа БУВС при втянутых упомянутых телескопических стойках его шасси в походно-заряжающей конфигурации, так и откидываемыми боковыми и задним бортами грузового отсека, задний из которых снабжен аппарелями и приводной лебедкой ТЗМ для затаскивания БУВС после вынужденной его посадки на землю с неизрасходованным боекомплектом, а не на горизонтальную взлетную площадку ТЗМ, увеличенную боковыми бортами кузова, для вертикального с ней взлета БУВС с боекомплектом, например, с противотанковыми управляемыми ракетами (ПТУР), размещенными в транспортно-пусковых контейнерах (ТПК), смонтированных по два ТПК с каждой стороны каждого Г-образного при виде сзади балочного держателя, закрепленного с внутреннего борта соответствующей разнесенной балки с возможностью замены пустого на заряженный балочный держатель с ТПК при нахождении БУВС в ложементе ТЗМ и размещении каждого его балочного держателя над позицией разгрузки/загрузки, обеспечивающей как автоматический съем и его опускание в соответствующий боковой магазин системы хранения и перезаряжания ТЗМ на позиции разгрузки, так и выполнения в последнем автоматического перезаряжания, но и последующего затем на позиции загрузки автоматического поднятия каждого заряженного балочного держателя с ТПК к разнесенной балке для его фиксации и закрепления на ней, причем в походном положении БУВС, который фиксируется на специальном подъемном ложементе ТЗМ, расположенном внутри грузового его отсека, имеющего автоматическое как открывание и закрывание боковых и заднего бортов с аппарелями (по необходимости) с помощью соответствующих приводных мини-лебедок, при этом боковые борта в походном положении, выполненные Г-образными, верхние поворотные полки которых, являясь створками крыши, находящейся на одном уровне с крышей корпуса ТЗМ, закрывают сверху грузовой отсек, а при их открывании они автоматически поворачиваются, складываясь с бортом, обеспечивают горизонтальное расположение каждого бокового борта совместно с соответствующей створкой на выдвижных боковых упорах ТЗМ для выполнения вертикального взлета БУВС, жестко удерживаемого фиксаторами ложементов до тех пор, пока его несущая система достигнет необходимого уровня подъемной силы, синхронно и автоматически отключающего работу замков всех фиксаторов.
5. Авиационный ракетный комплекс с беспилотным ударным вертолетом-самолетом по любому из пп. 1-3, отличающийся тем, что упомянутая гибридная ЭСУ, питаемая от внутреннего или внешнего источника энергии, обеспечивает два способа функционирования БУВС соответственно как автономного (для крейсерского полета) или как привязного БУВС (для энергозатратного вертикального взлета), связанного посредством автоматического узла стыковки/расстыковки отрывного его разъема через электроразъем бронированного кабеля с плавающей гусеничной ТЗМ, имеющей электроустановку, работающую от вала отбора мощности ее двигателя, и/или встроенный дизельный электроагрегат со средствами накопления и подвода электроэнергии гибким кабелем, размотка/намотка которого при вертикальном стартовом взлете обеспечивается барабаном со следящим электроприводом, установленным в энергетическом отсеке ТЗМ, причем при наборе БУВС стартовой высоты в 50 метров и отлете его вбок от ТЗМ с последующим его барражирующим круговым облетом ТЗМ и зависанием при срабатывании средств его целеуказания с переключением электропитания на внутренний его источник, то происходит расстыковка и вылет БУВС с отделением от его фюзеляжа гибкого кабеля посредством автоматического узла расстыковки, который имеет пиротолкатель, выбрасывающий парашют для его управляемого спуска на поверхность земли с соответствующей автоматической подмоткой кабеля на барабан ТЗМ.
6. Авиационный ракетный комплекс с беспилотным ударным вертолетом-самолетом по любому из пп. 1-3, отличающийся тем, что упомянутый ТЗМ выполнен в виде стационарной заряжающей станции, смонтированной на стартовоприемной платформе, размещаемой на транспортном средстве, цапример, на автомобильном, железнодорожном или водном, обеспечивающем его установку, транспортирование и функционирование при соответствующем передвижении, при этом в корабельном противолодочном ракетном комплексе (КПЛРК) палубный БУВС, несущий авиационную противолодочную ракету АПР-3Э, оснащен опускаемой гидроакустической системой, состоящей из индикатора акустических сигналов и двух приемников для их приема от гидроакустического буя, их кодирования и передачи по восьмиканальной закрытой связи на корабль для обработки в реальном масштабе времени, и высокочувствительным магнитометром, смонтированными в удлиненном обтекателе вертикального оперения так, что в нижней передней его части установлен магниточувствительный элемент, работающий на расстоянии 30 м от водной поверхности, и снабжен по обе стороны от центра масс в нижней части каждой разнесенной балке швартующим устройством с рычагом ручного управления, имеющим на отклоняемой вниз/вверх телескопической штанге запорный механизм и устройство захвата, контактирующее с ячейками палубной решетки, обеспечивая возможность посадки на корабль при кренах до 25°.
7. Авиационный ракетный комплекс с беспилотным ударным вертолетом-самолетом по любому из пп. 1-3, отличающийся тем, что упомянутая стартовоприемная платформа выполнена в виде автомобильного колесного прицепа, буксируемого, например бронеавтомобилем типа "Тигр-М", имеющим свои выдвижные модули вооружения с ПТУР типа "Корнет-Д".
| Установка для заправки шприцев консистентной смазкой | 1959 |
|
SU130297A1 |
| МНОГОВИНТОВОЙ ПРЕОБРАЗУЕМЫЙ БЕСПИЛОТНЫЙ ВЕРТОЛЕТ | 2014 |
|
RU2550909C1 |
| US 20170313422 A1, 02.11.2017 | |||
| WO 2007141795 A1, 13.12.2007 | |||
| US 9598169 B1, 21.03.2017. | |||

