Изобретение относится к области измерительной техники и может быть использовано для измерения относительных перемещений между двумя точками на земной поверхности, разнесенными на значительные расстояния, происходящих из-за воздействия природных и экзогенных процессов или отдельных участков инженерных и строительных сооружений.
Известен деформограф, включающий станину с разрезной втулкой, штангу, один конец которой закреплен в разрезной втулке, а второй связан с цанговым зажимом, фотоэлектрический преобразователь, выполненный в виде металлического экрана с прямоугольным отверстием по центру, с одной стороны которого симметрично отверстию расположен светодиод, а с другой - дифференциальный фотоэлемент, устройство типа «ласточкин хвост» с подвижной и неподвижной частями, реверсивный двигатель с редуктором, регистратор, установленную на подвижной части устройства типа «ласточкин хвост» монтажную рамку, в которой на двух горизонтально расположенных упругих нитях подвешен горизонтально и параллельно оси штанги рычаг, на свободном конце которого закреплен экран фотоэлектрического преобразователя, две пары цилиндрических постоянных магнитов, первая пара которых закреплена параллельно оси штанги на цанговом зажиме посредством технологического стержня, а вторая пара - на упругих нитях монтажной рамки перпендикулярно оси штанги и симметрично относительно нитей, микрометрическое отсчетное устройство, закрепленное посредством кронштейна на подвижной части устройства типа «ласточкин хвост», две соосно установленные пружины, одни концы которых соединены с рычагом, а другие концы - с устройством типа «ласточкин хвост» и микрометрическим отсчетным устройством соответственно, при этом в каждой паре магнитов последние выполнены с одинаковыми моментами и развернутыми относительно друг друга на 180° одноименными полюсами, а свободные концы первой пары магнитов расположены против концов второй пары магнитов, имеющих ту же полярность, причем упругие моменты пружин равны и направлены противоположно друг другу (патент РФ №2386150).
Недостатком данного деформографа является низкая достоверности измерений из-за наличия в конструкции постоянных магнитов, неконтролируемый дрейф намагниченности которых приводит к дрейфу нуля всей измерительной системы, что ограничивает возможности использования этого устройства для измерения длиннопериодных и квазистатических процессов.
Наиболее близким по технической сущности к предлагаемому изобретению является устройство для измерения деформаций земной поверхности, включающее анкер, соединенный посредством троса с датчиком для измерения деформаций земной поверхности, установленным в корпусе и состоящим из двигателя с валом, подвижного блока, буферной катушки, приспособления для измерения силы натяжения троса, соединенного с входом блока обработки сигнала, выход которого соединен с входом блока управления двигателем, выходы которого соединены соответственно с двигателем и блоком преобразования сигнала с блока управления двигателем в величину подвижек анкера, энкодера, соединенного с блоком преобразования сигнала с энкодера в величину подвижек анкера, при этом выход блока преобразования сигнала с блока управления в величину подвижек анкера и выход блока преобразования сигнала с энкодера в величину подвижек анкера соединены с блоком сравнения сигналов с блоков управления двигателем и энкодера (патент РФ №2625616).
Недостатком данного устройства является низкая достоверность и чувствительность измерений из-за влияния дрейфовых явлений.
Техническим результатом является повышение достоверности и чувствительности измерений за счет уменьшения влияния дрейфовых явлений.
Технический результат достигается в устройстве для измерения деформаций земной поверхности, включающем установленный горизонтально блок измерения изменения длины троса, выполненный цилиндрической формы с расположенными внутри него валом, выступающим с одной стороны, постоянным магнитом, установленным на валу, и магнитным преобразователем угловых перемещений постоянного магнита в электрический сигнал, соединенный с блоком преобразователя электрического сигнала в цифровой сигнал, установленный соосно блоку измерения изменения длины троса на выступающей части вала мерный ролик цилиндрической формы, на внешней боковой поверхности которого выполнена выемка, анкер, установленный в точке измерения и соединенный посредством троса, проходящего по выемке мерного ролика, с грузом, обеспечивающим постоянное натяжение троса, микроконтроллер, входы которого соединены, соответственно со стабилизатором питания и выходом блока преобразователя электрического сигнала в цифровой сигнал, а выход -с входом блока передачи цифрового сигнала внешним устройствам, ключ питания, вход которого соединен с выходом стабилизатора питания, а выходы - с блоком измерения изменения длины троса и блоком преобразователя электрического сигнала в цифровой сигнал.
Установленный горизонтально блок измерения изменения длины троса, выполненный цилиндрической формы с расположенными внутри него валом, выступающим с одной стороны, постоянным магнитом, установленным на валу, и магнитным преобразователем угловых перемещений постоянного магнита в электрический сигнал уменьшает влияние дрейфовых явлений, воздействующих на результаты измерений, в особенности в области длиннопериодных измерений.
Блок преобразователя электрического сигнала преобразует электрический сигнал в цифровой сигнал.
Мерный ролик преобразует линейные перемещение троса в угловые перемещения вала.
Микроконтроллер контролирует превышение порогов линейных перемещений троса и передает эту информацию внешним устройствам, осуществляет обмен данными по лини связи с внешними устройствами с заданным периодом.
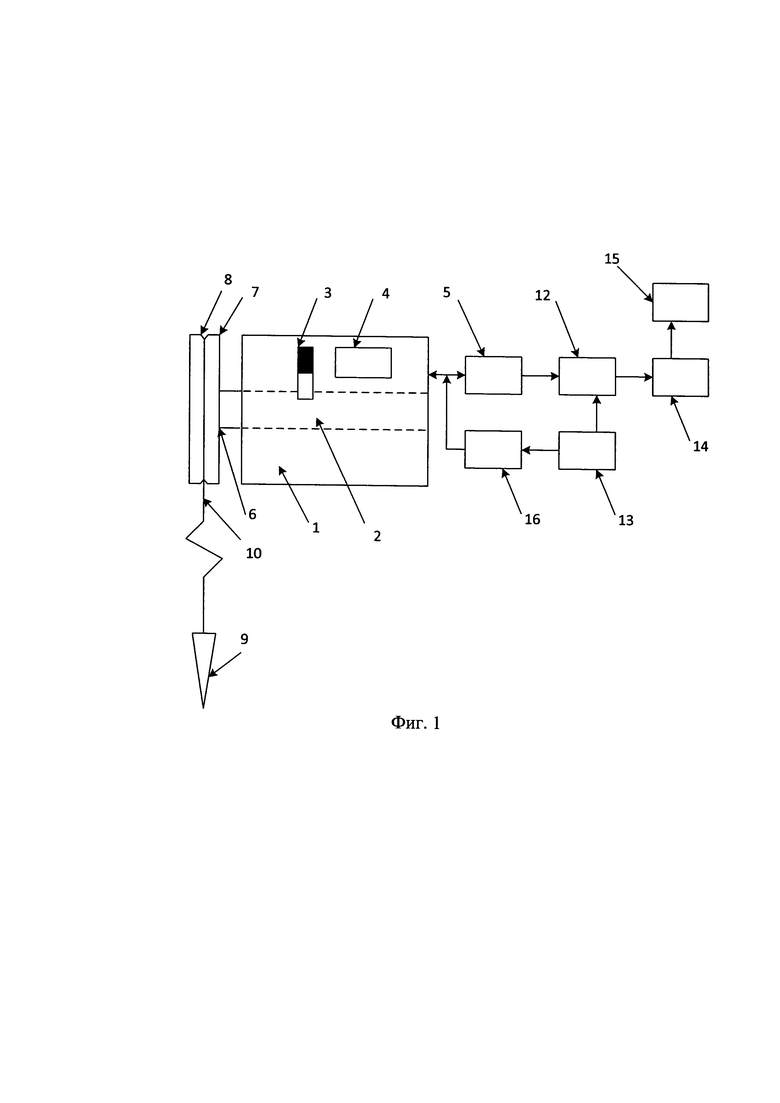
Устройство для измерения деформаций земной поверхности поясняется чертежом, где на фиг. 1 представлен общий вид устройства, на фиг. 2 - вид сбоку.
Устройство для измерения деформаций земной поверхности состоит из установленного горизонтально блока 1 измерения изменения длины троса, выполненного цилиндрической формы. Внутри блока 1 измерения изменения длины троса расположены вал 2, выступающий с одной стороны, постоянный магнит 3, установленный на валу 2, и магнитный преобразователь 4 угловых перемещений постоянного магнита 3 в электрический сигнал. Блок 1 измерения изменения длины троса соединен с блоком 5 преобразователя электрического сигнала в цифровой сигнал. На выступающей части 6 вала 2 установлен соосно блоку 1 измерения изменения длины троса мерный ролик 7, выполненный цилиндрической формы. На внешней боковой поверхности мерного ролика 7 выполнена выемка 8. В точке измерения на земной поверхности установлен анкер 9, соединенный посредством троса 10, проходящего по выемке 8 мерного ролика 7, с грузом 11, обеспечивающим постоянное натяжение троса. Входы микроконтроллера 12 соединены, соответственно со стабилизатором питания 13 и выходом блока 5 преобразователя электрического сигнала в цифровой сигнал, а выход - с входом блока 14 передачи цифрового сигнала внешним устройствам 15. Вход ключа питания 16, соединен с выходом стабилизатора питания 13, а выходы -с блоком измерения изменения длины троса 1 и блоком преобразователя электрического сигнала в цифровой сигнал 5.
Устройство для измерения деформаций земной поверхности работает следующим образом.
Перед началом проведения измерений после закрепления троса за анкер 9, выбора пути прохождения троса 10, огибания по выемке 8 на боковой поверхности мерного ролика 7, укрепленного на валу 2 блока 1 измерения изменения длины троса, и подвешивания за второй конец троса груза 11 для обеспечения постоянного натяжения троса, подается электрическое питание с помощью ключа 16 на устройство для измерения деформаций земной поверхности. При подвижке оползня происходит смещение анкера 9, расположенного в теле оползня, что приводит к вытяжению измерительного троса, проходящего через мерный ролик 7 и повороту вала 2 блока измерения. Вместе с валом 2 поворачивается и укрепленный на нем постоянный магнит 3 и с помощью магнитного преобразователя 4 обеспечивает информацией об угловом положении вала. Сигнал далее поступает на микроконтроллер 12 через блок 5 преобразователя электрического сигнала в цифровой сигнал. Произведение значения радиуса вала 2 и сигнала с блока 5 преобразователя угла поворота в цифровой вид является информацией о линейных перемещениях анкера 9 и, следовательно, о деформациях линейной базы «анкер - блок измерения изменений длины троса». Эта информация далее через блок 14 передачи цифрового сигнала внешним устройствам передается на внешние устройства 15, например, компьютер. Вся зарегистрированная информация заносится в базу данных, реализованную на компьютере 15. Питание блока 1 измерения изменения длины троса производится через стабилизатор 13 от аккумуляторных батарей.
Предложенное устройство для измерения деформаций земной поверхности позволяет повысить достоверность и чувствительность измерений за счет уменьшения влияния дрейфовых явлений в первую очередь в длиннопериодной и квазистатической области спектра, что особенно важно при измерении медленных процессов, связанных с подвижками оползня или накопления деформаций в искусственных сооружениях из-за природных и техногенных процессов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения деформаций земной поверхности | 2016 |
|
RU2625616C1 |
| Устройство для измерения глубины погружения оборудования | 2018 |
|
RU2675493C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСАДКИ ПОВЕРХНОСТИ ЗЕМЛИ | 2008 |
|
RU2376469C1 |
| Устройство для оценки технического состояния конструкций | 2025 |
|
RU2839370C1 |
| НАКЛОНОМЕР | 2001 |
|
RU2187829C1 |
| СЕЙСМИЧЕСКИЙ ПРИБОР | 1995 |
|
RU2097792C1 |
| СПОСОБ И СИСТЕМА АВТОМАТИЧЕСКОГО КОНТРОЛЯ КОНТАКТНОГО ПРОВОДА ЭЛЕКТРОТРАНСПОРТА | 2017 |
|
RU2750823C1 |
| Устройство для измерения неравномерности вращения вала | 1984 |
|
SU1246010A1 |
| Уровнемер | 1990 |
|
SU1755056A1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ДАТЧИК ВАРИАЦИЙ УРОВНЯ ЖИДКОСТИ | 2010 |
|
RU2438101C1 |

Изобретение относится к области измерительной техники и может быть использовано для измерения относительных перемещений между двумя точками на земной поверхности, разнесенными на значительные расстояния, происходящих из-за воздействия природных и экзогенных процессов или отдельных участков инженерных и строительных сооружений. Устройство для измерения деформаций земной поверхности состоит из установленного горизонтально блока 1 измерения изменения длины троса, выполненного цилиндрической формы. Внутри блока 1 измерения изменения длины троса расположены вал 2, выступающий с одной стороны, постоянный магнит 3, установленный на валу 2, и магнитный преобразователь 4 угловых перемещений постоянного магнита 3 в электрический сигнал. Блок 1 измерения изменения длины троса соединен с блоком 5 преобразователя электрического сигнала в цифровой сигнал. На выступающей части 6 вала 2 установлен соосно блоку 1 измерения изменения длины троса мерный ролик 7, выполненный цилиндрической формы. На внешней боковой поверхности мерного ролика 7 выполнена выемка 8. В точке измерения на земной поверхности установлен анкер 9, соединенный посредством троса 10, проходящего по выемке 8 мерного ролика 7, с грузом 11, обеспечивающим постоянное натяжение троса. Входы микроконтроллера 12 соединены, соответственно, со стабилизатором питания 13 и выходом блока 5 преобразователя электрического сигнала в цифровой сигнал, а выход - с входом блока 14 передачи цифрового сигнала внешним устройствам 15. Вход ключа питания 16 соединен с выходом стабилизатора питания 13, а выходы - с блоком измерения изменения длины троса 1 и блоком преобразователя электрического сигнала в цифровой сигнал 5. Техническим результатом является повышение достоверности и чувствительности измерений за счет уменьшения влияния дрейфовых явлений. 2 ил.
Устройство для измерения деформаций земной поверхности, включающее установленный горизонтально блок измерения изменения длины троса, выполненный цилиндрической формы с расположенными внутри него валом, выступающим с одной стороны, постоянным магнитом, установленным на валу, и магнитным преобразователем угловых перемещений постоянного магнита в электрический сигнал, соединенный с блоком преобразователя электрического сигнала в цифровой сигнал, установленный соосно блоку измерения изменения длины троса на выступающей части вала мерный ролик цилиндрической формы, на внешней боковой поверхности которого выполнена выемка, анкер, установленный в точке измерения и соединенный посредством троса, проходящего по выемке мерного ролика, с грузом, обеспечивающим постоянное натяжение троса, микроконтроллер, входы которого соединены, соответственно, со стабилизатором питания и выходом блока преобразователя электрического сигнала в цифровой сигнал, а выход - с входом блока передачи цифрового сигнала внешним устройствам, ключ питания, вход которого соединен с выходом стабилизатора питания, а выходы - с блоком измерения изменения длины троса и блоком преобразователя электрического сигнала в цифровой сигнал.
| Устройство для измерения деформаций земной поверхности | 2016 |
|
RU2625616C1 |
| ДЕФОРМОГРАФ | 2009 |
|
RU2386150C1 |
| ДЕФОРМОГРАФ | 2005 |
|
RU2298814C1 |
| US 4405231 A1, 20.09.1983. | |||

