Изобретение относится к области измерительной техники, в частности к методу измерения относительных перемещений двух точек на земной поверхности или отдельных участков инженерных и строительных сооружений, разнесенных на значительные расстояния - десятки - сотни метров, происходящих из-за воздействия природных и экзогенных процессов.
Известен деформометр для контроля напряженно-деформированного состояния в блочных структурах геосферы, включающий базовый зонд, по крайней мере один измерительный зонд, соединенные штангами неподвижно и трубопроводом энергоносителя, и контроллер, соединенный с измерительными зондами электрокабелем, при этом базовый зонд состоит из корпуса и неподвижного распорного узла с опорными ножками, а измерительный зонд - из корпуса, распорного узла с опорными ножками и измерителя, корпус измерительного зонда выполнен разъемным и состоит из силового и приборного патрубков, причем распорный узел измерительного зонда выполнен подвижным и размещен в силовом патрубке, а измеритель, в качестве которого использован растровый датчик перемещений с подвижным наконечником, - в приборном патрубке, при этом подвижный распорный узел снабжен направляющим стержнем, а силовой патрубок - направляющей втулкой, в которой закреплена неподвижная планка с фиксирующим гнездом для установки подвижного распорного узла в среднем положении, причем направляющий стержень подвижного распорного узла пропущен через направляющую втулку и постоянно контактирует с подвижным наконечником растрового датчика перемещений (RU, патент №2305186, Е21С 39/00, 2006).
Недостатком данного устройства является низкая эффективность измерения деформаций земной поверхности при больших линейных базах.
Наиболее близким по технической сущности к предлагаемому изобретению является деформограф, включающий станину, штангу, один конец которой жестко связан со станиной посредством разрезной втулки, а другой цанговым зажимом - с технологическим стержнем, упругий равносторонний параллелограммный усилитель смещения с коническими пережимами в его углах и закрепленными при помощи стержней в одном из его углов по малой диагонали дифференциальным фотоэлементом, а в противоположном углу - металлическим экраном с прямоугольным отверстием по центру и светодиодом, расположенным перпендикулярно экрану, при этом плоскости фотоэлемента и экрана параллельны плоскости усилителя смещения, а светодиод и фотоэлемент расположены симметрично отверстию на экране по разные от него стороны, регулирующее устройство, подвижная часть которого связана посредством конического стержня с одним из углов усилителя смещения по большой диагонали, а неподвижная часть - с реверсивным двигателем с редуктором, регистратор, подключенный к фотоэлементу, и блоки питания двигателя и светодиода, установленный соосно со штангой магнитострикционный стержень с намотанным на него соленоидом, соединенным с блоком питания и упругим ромбовидным фиксирующим устройством с коническими пережимами в его углах, при этом магнитострикционный стержень жестко закреплен в углах фиксирующего устройства по его малой диагонали и связан одним концом с технологическим стержнем, а другим - с усилителем смещения (RU, патент №2298814, G01V 1/16, 2005).
Недостатком данного устройства является низкая эффективность измерения деформаций земной поверхности при больших линейных базах и значительных по величине абсолютных деформациях.
Предлагаемым изобретением решается задача повышения эффективности измерения деформаций земной поверхности. Техническим результатом является повышение точности измерения деформаций земной поверхности на линейных базах длиной в сотни метров за счет автоматического поддержания постоянной величины силы натяжения троса при подвижках анкера и исключения явлений зажима троса на криволинейных участках трассы прокладки троса, а также уменьшение времени измерения, повышение достоверности измерения и увеличение динамического диапазона измеряемых деформаций.
Технический результат достигается в устройстве для измерения деформаций земной поверхности, включающем анкер, соединенный посредством троса с датчиком для измерения деформаций земной поверхности, установленным в корпусе и состоящим из двигателя с валом, подвижного блока, буферной катушки, приспособления для измерения силы натяжения троса, соединенного с входом блока обработки сигнала, выход которого соединен с входом блока управления двигателем, выходы которого соединены соответственно, с двигателем и блоком преобразования сигнала с блока управления двигателем в величину подвижек анкера, энкодера, соединенного с блоком преобразования сигнала с энкодера в величину подвижек анкера, при этом выход блока преобразования сигнала с блока управления в величину подвижек анкера и выход блока преобразования сигнала с энкодера в величину подвижек анкера соединены с блоком сравнения сигналов с блоков управления двигателем и энкодера.
Приспособление для измерения силы натяжения троса, установленное вблизи энкодера, позволяет непрерывно следить за величиной силы натяжения троса и поддерживать ее постоянной путем сматывания части троса с вала двигателя при подвижках анкера, приводящих к увеличению силы натяжения троса и возникновению эффектов заклинивания троса на неровностях трассы. Блок обработки сигнала преобразует сигнал с приспособления для измерения силы натяжения троса в электрическое напряжение. Блок управления двигателем преобразует это напряжение в сигнал управления двигателем. Блок преобразования сигнала дает информацию о подвижках анкера.
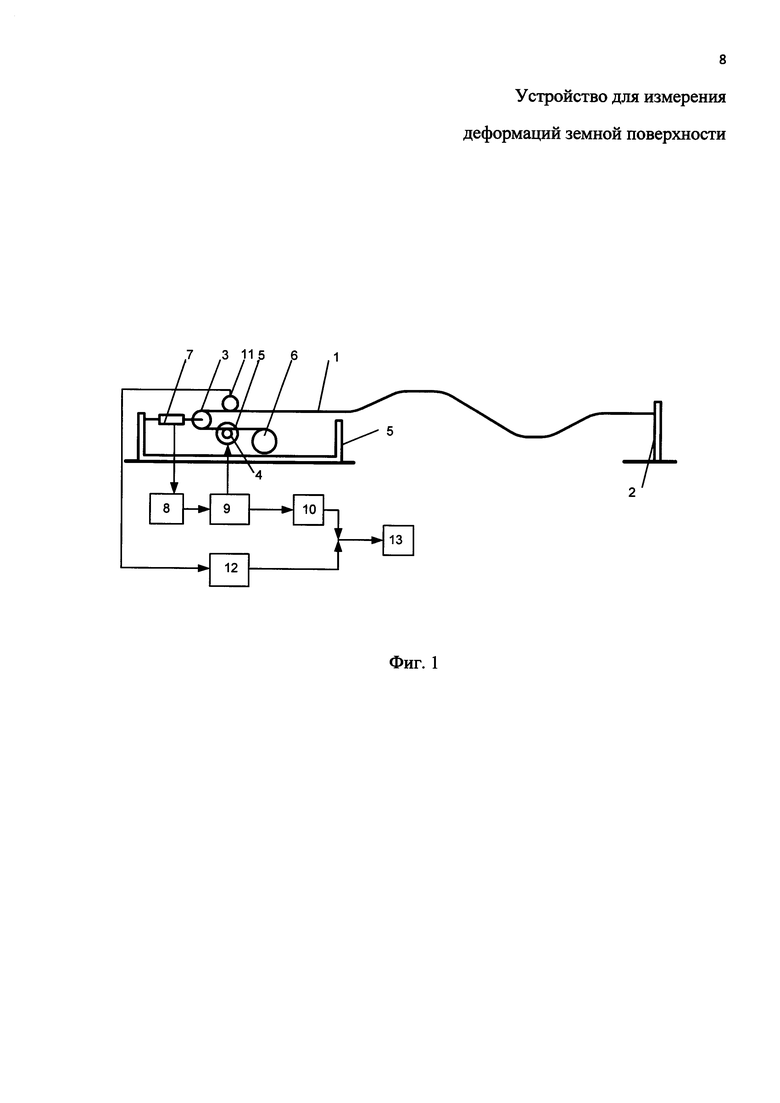
Устройство для измерения деформаций земной поверхности поясняется чертежом, где на фиг. 1 приведен общий вид устройства.
Устройство для измерения деформаций земной поверхности состоит из троса 1, закрепленного за анкер 2, который, пройдя искривления трассы, через подвижный блок 3 попадает на вал 4 электродвигателя 5 с большим коэффициентом редукции и датчиком угла поворота вала. Двигатель закреплен на основании корпуса системы измерения 5 прибора. На вале двигателя 4 все время остается несколько витков троса, что обеспечивается приторможенной буферной катушкой 6 с достаточным запасом троса, обеспечивающим возможность измерений даже при значительных подвижках анкера. В систему введено приспособление для измерения силы натяжения троса 7, с помощью которого измеряется сила натяжения троса. Напряжение с приспособления для измерения силы натяжения троса 7 поступает на вход блока обработки сигнала 8, выход которого соединен с входом блока управления двигателем 9, где формируется сигнал разности между цифровым сигналом с приспособления для измерения силы натяжения троса и введенным в его память значением, отвечающим определенной пороговой величине силы F0 - заранее заданной небольшой силе натяжения. Выходы с блока 9 соединены соответственно с двигателем 5 и блоком 10 преобразования сигнала с блока управления двигателем в величину подвижек анкера. Вычисление значения подвижек анкера происходит в блоке 10 преобразования выходного сигнала с блока 9 в величину подвижек анкера. Для получения независимой информации о перемещениях анкера в измерительный тракт введен энкодер 11, соединенный с входом блока 12 преобразования сигнала с энкодера в величину подвижек анкера. Выходы блоков 10 и 12 соединены с входом блока сравнения сигналов 13, в котором на основе анализа данных о величинах деформаций и с учетом геологических особенностей объекта наблюдений делается заключение о степени опасности развивающихся процессов.
Устройство для измерения деформаций земной поверхности работает следующим образом.
Перед началом проведения измерений (после прокладки троса в трубе по выбранной трассе и закрепления троса за анкер) трос натягивают так, чтобы сила его натяжения заведомо превышала пороговое значение F0, заранее внесенное в память процессора в блоке 9. После этого включается программа и по сигналу с блока 9 включается двигатель 5, который сматывает с вала 4 трос, уменьшая тем самым значение силы натяжения троса F. Двигатель останавливается, как только F≤F0. Величина X длины троса, смотанного с вала, пропорциональная времени работы двигателя, определяется из соотношения: X=N⋅t⋅r/k, где N - число оборотов двигателя в единицу времени, t - время работы двигателя, r - радиус вала двигателя, k - коэффициент редукции двигателя. Величина N⋅t/k=β - угол поворота вала двигателя за время t. Поскольку X=β⋅r, информация о подвижках анкера 2 получается с помощью простого умножения значения радиуса вала и сигнала с датчика угла поворота вала двигателя. После первого включения двигателя и начинаются режимные наблюдения за деформациями земной поверхности в автоматическом режиме. Сигнал с энкодера поступает на блок 12 преобразования сигнала с энкодера в величину подвижек анкера. Два независимых сигнала о подвижках анкера поступают на блок 13 сравнения сигналов о подвижках анкера, повышая тем самым надежность и достоверность получаемой информации. Введение в измерительную систему электродвигателя, управляемого сигналом с приспособления для измерения силы натяжения троса (т.е. превращение измерительного устройства в систему с обратной связью) позволяет исключить явления зажима троса на непрямолинейных участках трассы и, связанное с этим явлением, возрастание сил натяжения троса вблизи анкера до больших значений, когда проявляются проявления нелинейного поведения троса (гистерезис, нежелательные аномальные растяжения троса, пластичность и т.п.), что вносит существенные ошибки в результаты измерений. Результаты измерений содержатся в заносимых в память измерительной системы величинах подвижек анкера из двух независимых источников, текущего времени, когда произошла эта подвижка, и интервала времени, в течение которого произошла подвижка. Таким образом, при анализе получаемой информации имеется возможность не только получить данные о подвижках анкера за большой промежуток времени, но и проанализировать информацию внутри этого большого промежутка времени, важную для заключения о динамике развития процесса появления деформационных явлений на выбранном участке земной поверхности.
Благодаря высокой чувствительности прибора для измерения деформаций на больших базах имеется возможность наблюдать деформационные процессы на ранней стадии их развития и заранее сделать прогноз о возможной опасной динамике этого явления. Получение информации о величине подвижек анкера двумя независимыми способами повышает надежность и достоверность результатов измерений.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения деформаций земной поверхности | 2023 |
|
RU2809306C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ИЗМЕРЕНИЯ ГЛУБИНЫ СКВАЖИНЫ И ОБНАРУЖЕНИЯ В НЕЙ ЖИДКОСТИ ПРИ ОБЕСПЕЧЕНИИ ВЗРЫВНЫХ РАБОТ | 2023 |
|
RU2828356C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЛИНЫ ЛЕГКОДЕФОРМИРУЕМЫХ ТЕКСТИЛЬНЫХ МАТЕРИАЛОВ С УЧЕТОМ ИХ ДЕФОРМАЦИИ | 2013 |
|
RU2519986C1 |
| СПОСОБ КОНТРОЛЯ НАПРЯЖЕННО-ДЕФОРМИРОВАННОГО СОСТОЯНИЯ В БЛОЧНЫХ СТРУКТУРАХ ГЕОСФЕРЫ, БАЗОВАЯ ОПОРА, ДЕФОРМОМЕТР И РЕГИСТРАТОР | 1995 |
|
RU2097558C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ ГРУНТОВ СТАТИЧЕСКОЙ И ДИНАМИЧЕСКОЙ НАГРУЗКОЙ | 2010 |
|
RU2446251C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЛИНЫ ЛЕГКОДЕФОРМИРУЕМЫХ КОМПОЗИТНЫХ МАТЕРИАЛОВ | 2015 |
|
RU2590998C1 |
| Способ определения деформации элементов конструкции дельта-робота, которая проявляется только в процессе его движения | 2020 |
|
RU2754423C1 |
| СПОСОБ РАЗРАБОТКИ МЕСТОРОЖДЕНИЙ ФЛЮИДОВ | 2001 |
|
RU2199002C2 |
| СПОСОБ МОНИТОРИНГА БЕЗОПАСНОСТИ ГРУНТОВЫХ ПЛОТИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2393290C2 |
| Установка для поверки и калибровки уровнемеров | 2021 |
|
RU2772553C1 |
Устройство для измерения деформаций земной поверхности относится к области измерительной техники, в частности к методу измерения относительных перемещений двух точек на земной поверхности или отдельных участков инженерных и строительных сооружений, разнесенных на значительные расстояния, происходящих из-за воздействия природных и экзогенных процессов. Устройство для измерения деформаций земной поверхности состоит из троса 1, закрепленного за анкер 2, который, пройдя искривления трассы, через подвижный блок 3 попадает на вал 4 электродвигателя 5 с большим коэффициентом редукции и датчиком угла поворота вала. Двигатель закреплен на основании корпуса системы измерения 5 прибора. На вале двигателя 4 все время остается несколько витков троса, что обеспечивается приторможенной буферной катушкой 6 с достаточным запасом троса, обеспечивающим возможность измерений даже при значительных подвижках анкера. В систему введено приспособление для измерения силы натяжения троса 7, с помощью которого измеряется сила натяжения троса. Напряжение с приспособления для измерения силы натяжения троса 7 поступает на вход блока обработки сигнала 8, выход которого соединен с входом блока управления двигателем 9, где формируется сигнал разности между цифровым сигналом с приспособления для измерения силы натяжения троса и введенным в его память значением, отвечающим определенной пороговой величине силы F0 - заранее заданной небольшой силе натяжения. Выходы с блока 9 соединены соответственно с двигателем 5 и блоком 10 преобразования сигнала с блока управления двигателем в величину подвижек анкера. Вычисление значения подвижек анкера происходит в блоке 10 преобразования выходного сигнала с блока 9 в величину подвижек анкера. Для получения независимой информации о перемещениях анкера в измерительный тракт введен энкодер 11, соединенный с входом блока 12 преобразования сигнала с энкодера в величину подвижек анкера. Выходы блоков 10 и 12 соединены с входом блока сравнения сигналов 13, в котором на основе анализа данных о величинах деформаций и с учетом геологических особенностей объекта наблюдений делается заключение о степени опасности развивающихся процессов. Технический результат – повышение точности результатов измерений. 1 ил.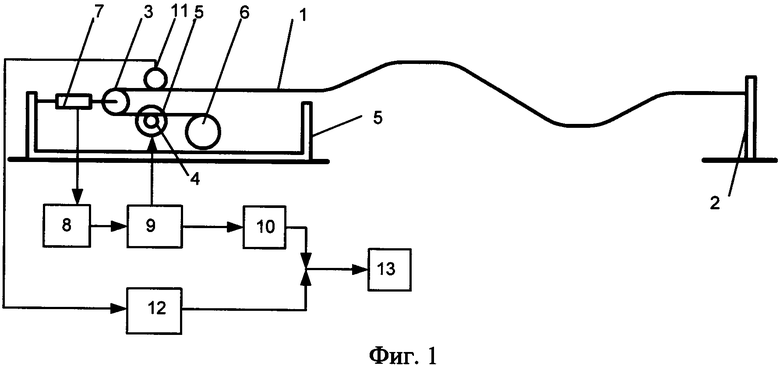
Устройство для измерения деформаций земной поверхности, включающее анкер, соединенный посредством троса с датчиком для измерения деформаций земной поверхности, установленным в корпусе и состоящим из двигателя с валом, подвижного блока, буферной катушки, приспособления для измерения силы натяжения троса, соединенного с входом блока обработки сигнала, выход которого соединен с входом блока управления двигателем, выходы которого соединены соответственно с двигателем и блоком преобразования сигнала с блока управления двигателем в величину подвижек анкера, энкодера, соединенного с блоком преобразования сигнала с энкодера в величину подвижек анкера, при этом выход блока преобразования сигнала с блока управления в величину подвижек анкера и выход блока преобразования сигнала с энкодера в величину подвижек анкера соединены с блоком сравнения сигналов с блоков управления двигателем и энкодера.
| ДЕФОРМОГРАФ | 2005 |
|
RU2298814C1 |
| Способ определения величины смещения кровли очистных камер | 1984 |
|
SU1232799A1 |
| СПОСОБ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ СМЕЩЕНИЯ ПОРОД КРОВЛИ | 2005 |
|
RU2299324C2 |
| Устройство для измерения смещений грунтов | 1980 |
|
SU894061A1 |
| Устройство для измерения смещений грунта | 1983 |
|
SU1105643A1 |
| CN 105178959 A, 23.12.2015. | |||

