Изобретение относится к транспортному машиностроению, а именно к усовершенствованию конструкции колесных трелевочных машин (скиддеров) с целью улучшения проходимости и увеличения полезной нагрузки в условиях транспортного пути с недостаточной несущей способностью.
Известно изобретение (патент РФ №2618613 С1, МПК В60В 39/00, B62D 61/12, опубл. 04.05.2017) в виде дополнительной опорной оси для достижения повышения агротехнической проходимости трактора за счет равномерного распределения собственной нагрузки колесного трактора по всем осям.
Недостатком конструкции является увеличение массы и габаритных размеров трактора, что приводит к ухудшению его маневренности, снижению грузоподъемности. Дополнительная опорная ось повышает сопротивление движению машины.
Известно погрузочное устройство трелевочного трактора (патент СССР №162752 С1, МПК B62d, B65g, опубл. 08.05.1964) для равномерного распределения нагрузки по опорным каткам ходовой части трактора, а также для уменьшения деформации и износа рабочей поверхности погрузочного щита.
Недостатком погрузочного устройства трелевочного трактора является ограниченная возможность его применения для колесного трактора-пачкоподборщика (скиддера) в силу ограничение массо-габаритного и компоновочного характера, а также преимущественная ориентация на чокерную трелевку.
Известно устройство (патент BY №11784 С1 2009.04.30, МПК (206) В60Р 3/40, опубл. 30.12.2008) для захвата и трелевки деревьев, содержащее самоходное шасси, на раме которого установлен управляемый щит, выполненный с U-образной опорной поверхностью, взаимодействующий с подпружиненной стрелой, на конце которой закреплен челюстной захват.
Недостатком прототипа является внушительная металлоемкость конструкции, значительная перегрузка заднего ведущего моста в положении погруженной пачки лесоматериалов.
Это решение принято за прототип, так как принципы и физические закономерности, реализованные в изобретении, наиболее близки к заявляемому.
Изобретение решает задачу равномерного распределения нагрузки на ведущие мосты колесного трелевочного трактора (скиддера) за счет обеспечения подвижности основания технологического оборудования относительно рамы трактора.
Ранее было установлено (Макунина, Я.С. Осевые нагрузки колесных скиддеров и их влияние на проходимость машин / Я.С. Макунина, С.Н. Долматов // Машиностроение: новые концепции и технологии: Всероссийская научно-практическая конференция студентов, аспирантов и молодых ученых, Красноярск, 28 октября 2022 года. - Красноярск: Федеральное государственное бюджетное образовательное учреждение высшего образования "Сибирский государственный университет науки и технологий имени академика М.Ф. Решетнева", 2022. - С. 84-90. - EDN LOTWBG.), что при работе двухосного колесного скиддера на грунтах с низкой несущей способностью наблюдается перегрузка заднего моста, коэффициент перегрузки составляет от 1,7 до 2,9. Неравномерная загрузка ведущих мостов колесного скиддера приводит к существенному ухудшению его проходимости, снижению выработки, увеличению простоев техники.
Технический результат обеспечивает подвижность основания технологического оборудования относительно рамы трактора в горизонтальной плоскости обеспечит оперативное изменение координат центра тяжести распределенной нагрузки в целях исключения возможности перегрузки заднего моста колесной транспортно-переместительной машины (скиддера).
Технический результат достигается за счет того, что пачковый трелевочный захват с подвижным основанием, состоящий из рамы, стрелы с гидроцилиндром, захвата, который крепится на конце стрелы, согласно изобретению, подвижное основание оснащено катками, на которых оно двигается при помощи гидроцилиндров по задней раме, при этом свобода движения в вертикальной плоскости и ограничивается упорами, а управление перемещением подвижного основания осуществляется с помощью электронного блока управления, который принимает сигнал с датчика нагрузки переднего моста и сравнивает величину сигнала с информацией с датчика нагрузки заднего моста.
Пачковый трелевочный захват с подвижным основанием поясняется чертежами:
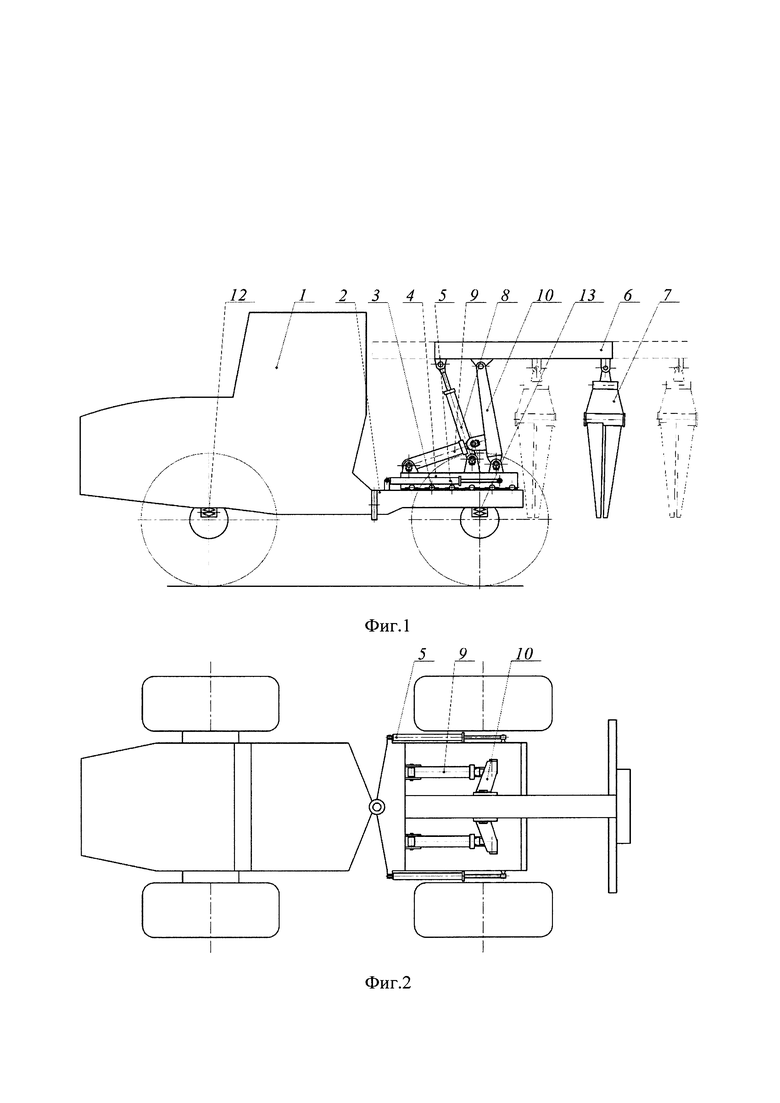
Фиг. 1 - пачковый трелевочный захват колесного скиддера с подвижным основанием (вид сбоку, при перемещении подвижного основания).
Фиг. 2 - пачковый трелевочный захват колесного скиддера с подвижным основанием (вид сверху).
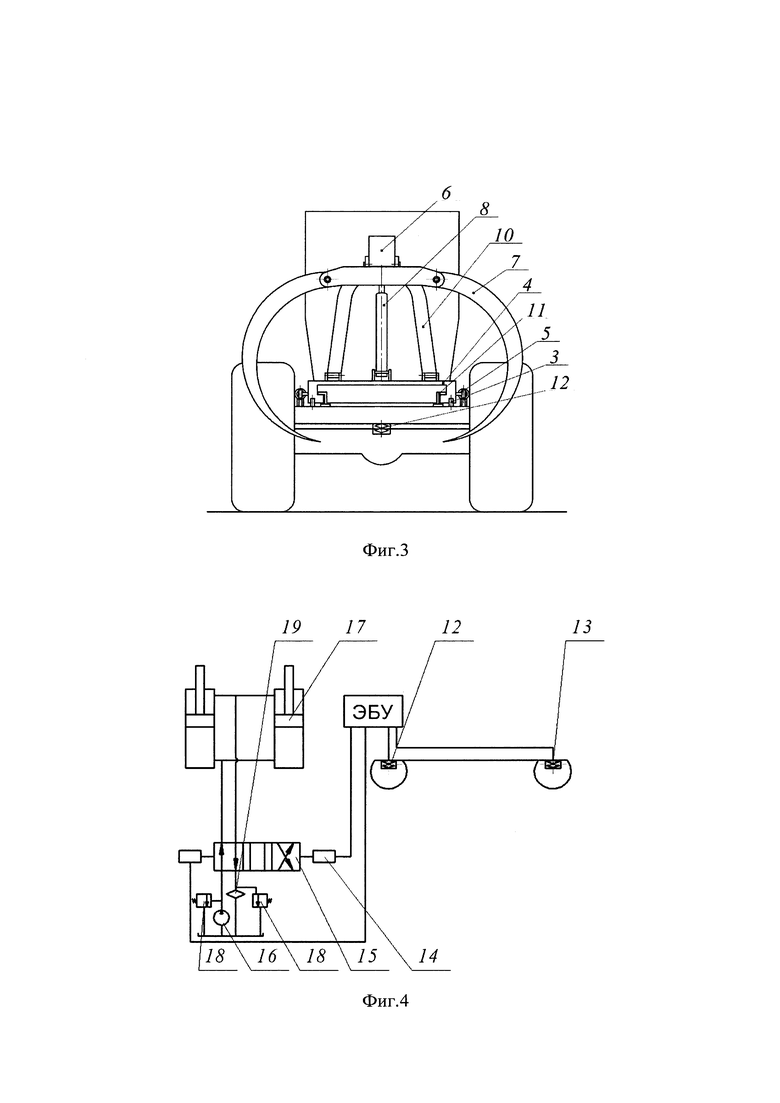
Фиг. 3 - пачковый трелевочный захват колесного скиддера с подвижным основанием (вид сзади).
Фиг. 4 - принципиальная гидравлическая схема системы управления подвижным основанием.
Пачковый трелевочный захват с подвижным состоит из передней рамы 1, на поверхности задней рамы 2 установлены катки 3, являющиеся опорами подвижного основания технологического оборудования 4. В качестве привода используются гидроцилиндры 5. А гидроцилиндры 5 шарнирно закреплены к задней раме 2 и подвижному основанию технологического оборудования 4. Движение происходит в сторону кабины трактора или в сторону заднего моста на величину, определяемую вылетом штока гидроцилиндров 5. Навесное оборудование представлено стрелой 6 и пачковым трелевочным захватом 7, гидроцилиндрами 8 и 9. Стрела 6 поднимается или опускается при помощи гидроцилиндра 8. А-образная рама 10, на которой шарнирно закреплена стрела 6, опускается и поднимается за счет гидроцилиндров 9. Подвижное основание технологического оборудования 4 может двигаться только в горизонтальной плоскости. Свобода движения в вертикальной плоскости ограничивается упорами 11. В точках крепления ведущих мостов к передней 1 и задней раме 2 установлены тензометрические датчики для измерения действующей нагрузки на передний 12 и задний 13 ведущие мосты. Подвижное основание технологического оборудования 4 вместе с трелюемой пачкой хлыстов или деревьев может перемещаться в сторону кабины трактора или в противоположную строну в зависимости от величины действующей нагрузки на передний и задний ведущие мосты трактора, фиксируемой тензометрическими датчиками 12 и 13. Электронный блок управления (ЭБУ) принимает сигнал с датчика переднего моста 12 и сравнивает величину сигнала с информацией с датчика нагрузки заднего моста 13. При рассогласовании величины этих сигналов ЭБУ подает управляющий импульс на соленоид 14 управления золотником гидрораспределителя 15. При этом рабочая жидкость, нагнетаемая гидравлическим насосом 16, подается в штоковую или поршневую полость гидроцилиндров 17 перемещения подвижного основания технологического оборудования 4. Пачковый трелевочный захват 7 с полезным грузом деревьев или хлыстов смещается вместе с подвижным основанием технологического оборудования 4 в сторону кабины трактора. При этом происходит рост нагрузки на передний мост и снижение нагрузки на задний ведущий мост трактора. Напорная и сливные линии оборудованы предохранительными клапанами 18 и фильтром 19.
Устройство работает следующим образом. Колесный трелевочный трактор (скиддер) движется по пасечному волоку лесосеки и осуществляет маневрирование в области расположения комлевой части пачки деревьев. Оператор располагает машину таким образом, чтобы пачковый трелевочный захват 7 мог произвести зажим пачки. После чего подвижное основание технологического оборудования 4 под действием гидроцилиндров 5 перемещается в крайнее положение относительно заднего ведущего моста трактора. Крайнее положение обеспечивает увеличение рабочей зоны действия захвата, т.е. оператор имеет возможность захватить пачку, находящуюся на большем расстоянии от скиддера, по сравнению со стандартной конструкцией, не имеющей механизма, обеспечивающего подвижность основания технологического оборудования. Производится максимальное раскрытие рычагов пачкового трелевочного захвата 7. А-образная рама 10 опускается гидроцилиндрами 9, стрела 6 опускается гидроцилиндром 8 и производится зажим пачки деревьев пачковым трелевочным захватом 7. Затем стрела 6 и А-образная рама 10 поднимаются, пачка деревьев оказывается в полуподвешенном состоянии, комлевая часть зажата рычагами пачкового трелевочного захвата 7, а вершинная часть находится на пасечном волоке. Для снижения нагрузки на задний ведущий мост подвижное основание технологического оборудования 4 перемещается в сторону кабины и оператор переводит систему в автоматизированный режим, когда перемещение подвижного основания технологического оборудования 4 регулируется ЭБУ.
Применение предлагаемой конструкции пачкового трелевочного захвата с подвижным основанием позволит решить задачу улучшения проходимости и увеличения полезной нагрузки колесных скиддеров в условиях транспортного пути с недостаточной несущей способностью.
Улучшение проходимости за счет равномерного распределения нагрузки на ведущие мосты трелевочной машины обеспечит уменьшение времени на выполнение технологических операций, увеличит производительность, снизит расходы на ГСМ, ТО и TP оборудования.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И МАШИНА ДЛЯ ТРЕЛЕВКИ | 2002 |
|
RU2224417C2 |
| МАШИНА ДЛЯ БЕСЧОКЕРНОЙ ТРЕЛЕВКИ ДЕРЕВЬЕВ | 2011 |
|
RU2465765C1 |
| МАШИНА ЛЕСОЗАГОТОВИТЕЛЬНАЯ | 2005 |
|
RU2294621C1 |
| ТРЕЛЕВОЧНО-ПОГРУЗОЧНАЯ МАШИНА | 2010 |
|
RU2440288C1 |
| Транспортное средство для бесчокерной трелевки деревьев | 1981 |
|
SU981041A1 |
| СПОСОБ И МАШИНА ДЛЯ ТРЕЛЕВКИ | 2007 |
|
RU2357407C2 |
| ТРЕЛЕВОЧНЫЙ ТРАКТОР | 1991 |
|
RU2013238C1 |
| Машина для очистки лож водохранилищ от древесины | 2019 |
|
RU2743241C2 |
| Устройство для захвата и трелевки деревьев | 1990 |
|
SU1757933A1 |
| Устройство для захвата и трелевки деревьев | 1987 |
|
SU1404386A1 |
Изобретение относится к индустрии транспортного машиностроения, а именно к усовершенствованию конструкции колесных трелевочных машин. Пачковый трелевочный захват с подвижным основанием состоит из рамы, стрелы с гидроцилиндром, захвата, крепящегося на конце стрелы. Подвижное основание оснащено катками, на которых оно двигается при помощи гидроцилиндров по задней раме. Свобода движения в вертикальной плоскости ограничивается упорами, а управление перемещением подвижного основания осуществляется с помощью электронного блока управления, который принимает сигнал с датчика нагрузки переднего моста и сравнивает величину сигнала с информацией с датчика нагрузки заднего моста. Достигается возможность автоматизированного перемещения основания пачкового трелевочного захвата в сторону кабины трактора или в противоположную строну при помощи гидроцилиндров в зависимости от величины действующей нагрузки на передний и задний мосты трактора, что приводит к снижению степени перегрузки заднего моста трактора и повышению проходимости трелевочной машины. 4 ил.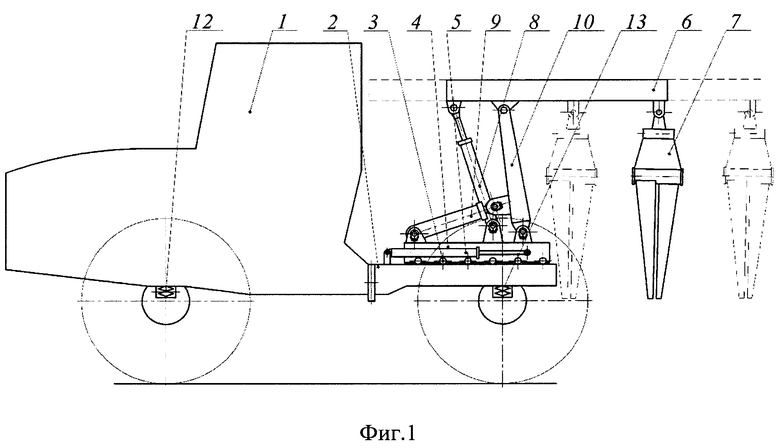
Пачковый трелевочный захват с подвижным основанием, состоящий из рамы, стрелы с гидроцилиндром, захвата, крепящегося на конце стрелы, отличающийся тем, что подвижное основание оснащено катками, на которых оно двигается при помощи гидроцилиндров по задней раме, при этом свобода движения в вертикальной плоскости ограничивается упорами, а управление перемещением подвижного основания осуществляется с помощью электронного блока управления, который принимает сигнал с датчика нагрузки переднего моста и сравнивает величину сигнала с информацией с датчика нагрузки заднего моста.
| Погрузочное устройство трелевочного трактора | 1982 |
|
SU1092071A1 |
| US 11528856 B2, 20.12.2022 | |||
| US 2020122989 A1, 23.04.2020 | |||
| Трелевочная машина | 1980 |
|
SU918263A1 |

