(54) ТРЕЛЕВОЧНАЯ МАШИНА
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И МАШИНА ДЛЯ ТРЕЛЕВКИ | 2002 |
|
RU2224417C2 |
| МАШИНА ДЛЯ БЕСЧОКЕРНОЙ ТРЕЛЕВКИ ДЕРЕВЬЕВ | 2004 |
|
RU2285388C2 |
| Валочно-пакетирующая машина | 1973 |
|
SU447134A1 |
| Лесозаготовительная машина | 1983 |
|
SU1132858A1 |
| СПОСОБ РАСКРЯЖЕВКИ УЛОЖЕННЫХ В ШТАБЕЛЬ ДЕРЕВЬЕВ | 2014 |
|
RU2599563C2 |
| КОРЧЕВАТЕЛЬ | 1972 |
|
SU419204A1 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 1998 |
|
RU2130249C1 |
| Лесозаготовительная машина | 1987 |
|
SU1442134A1 |
| МАШИНА ЛЕСОЗАГОТОВИТЕЛЬНАЯ | 2005 |
|
RU2294621C1 |
| Устройство для сбора и трелевки пачки деревьев | 1977 |
|
SU854850A1 |
I
Изобретение относится к машинам для бесчокерной трелевки деревьев и может быть использовано в лесной промышленности.
Известна трелевочная машина, содержащая самоходное шасси, на раме которого жестко закреплен кронштейн, на котором установлена плита с возможностью поворота вокруг горизонтальной оси посредством соединенного с ней своим штоком гидроцилиндра, при этом плита снабжена поворотной вокруг горизонтальной оси стрелой с захватиым органом 1)
11ель изобретения - повьпиение эксплуатационных качеств машины.
Для этого она снабжена жестко закрепленной на плите опорой, взаимодеЙствующей с рамой в транспортном положении, а корпус гндроцилиндра шарнирно установлен на кронштейне.
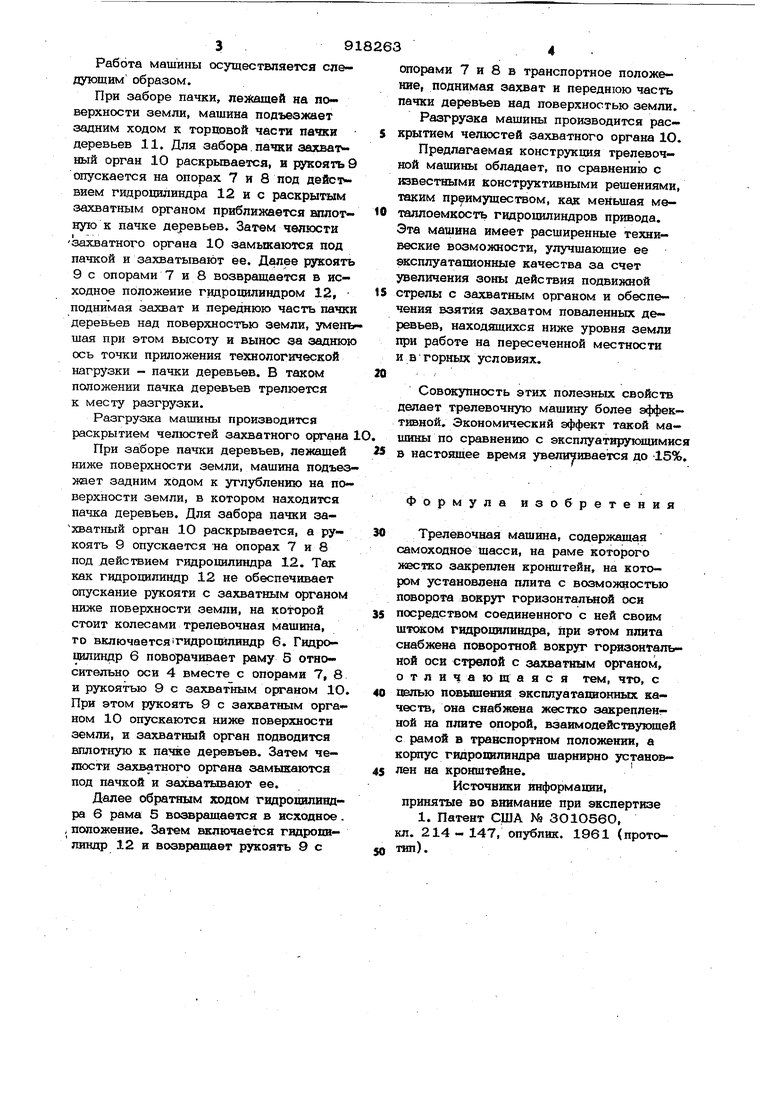
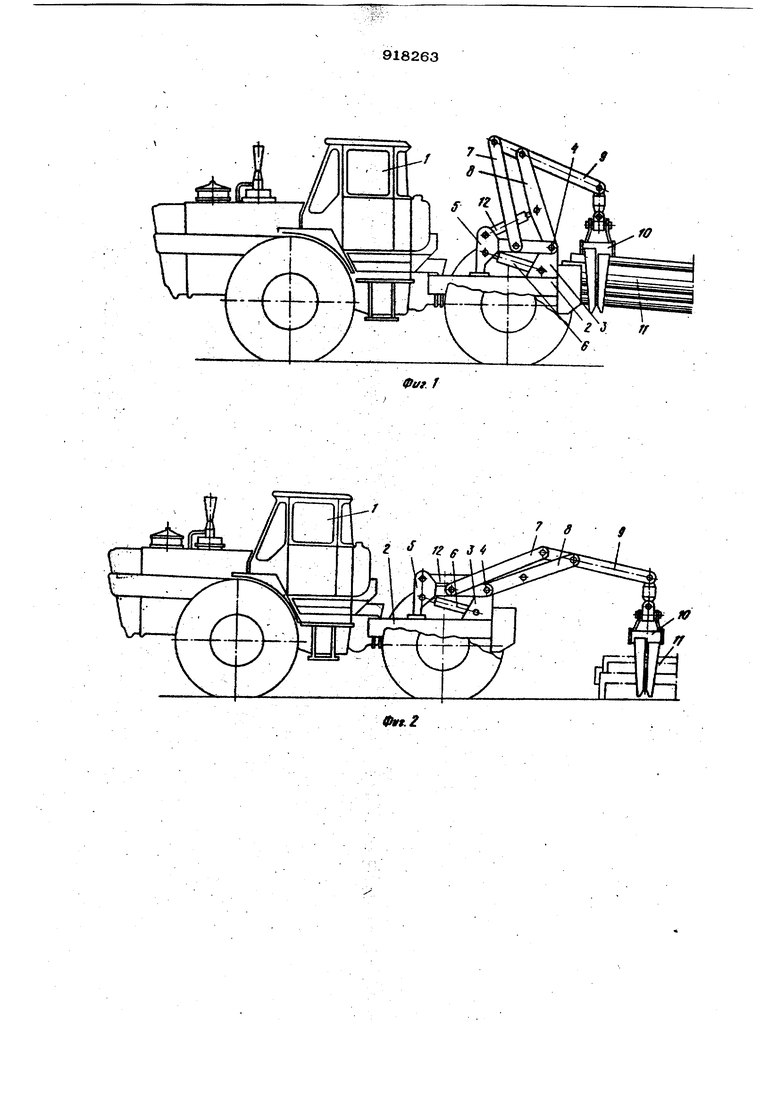
На фиг. 1 изображена трелевочная машина, . вид сбоку в транспортном положении с пакетом трелюемых деревьев;
на фиг. 2 - то же, в рабочем положении при заборе пачки деревьев, лежащих на поверхности земли;;на фиг. 3 - то же, в рабочем п6ло жении при заборе пачки аеревьев,лежащих: ниже поверхности земли.
Трелевочная машина включает самоходное шасси 1, на раме 2 которого жесчтсо закреплен кронштейн 3. К этому кронштейну посредством оси 4 крепится шарнирно рама 5, имеющая возможность
to поворота в вертикал 1лой плоскости относительно горизонтальной оси 4 досредством гидроцилиндра 6, кортус гидроцилиндра 6 шарнирно крепится к кронштейну 3, а шток - к раме 5. На раме 5
IS шарнирно закреплена стрела, состоящая из передней 7, задней 8 опор, KOTOfSJe в верхней части шарнирно соединены с рукоятью 9, несущей на себе захватный орган 1О для. захвата поваленных де20ревьев 11.
К задней опоре 8 шарнирно крепится гидроцилиндр 12, корпус которого шарнирно крепится к раме 5. 39 Работа машины осуществляется следующим образом. При заборе пачки, ле}((ащей на поверхности земли, мащина подъезжает задним ходом к торцовой части печки деревьев 11. Для забора пачки захват ный орган 10 раскрьгоается, и рукоять 9 опускается на опорах 7 и 8 под дейст вием гидрощшиндра 12 и с раскрытым захватным органом приближается вплотную к пачке деревьев. Затем челюсти Захватного органа 10 замыкаются под пачкой и захватывают ее. Далее рукоять 9 с опорами 7 и 8 возвращается в исходное положение гидроцилиндром 12f поднимая захват и переднюю часть пачки деревьев над поверхностью земли, умень шая при этом высоту и вынос аа заднюю ось точки приложения технологической нагрузки - пачки деревьев. В таком положении пачка деревьев трелюется к месту разгрузки. Разгрузка машины производится раскрытием челюстей захватного органа При заборе пачки деревьев, лежашей ниже поверхности земли, машина подъез жает задним ходом к углублению на поверхности земли, в котором находится пачка деревьев. Для забора пачки захватный орган 10 раскрьгеается, а рукоять 9 опускается на опорах 7 и 8 под действием гидроцилиндра 12. Так как гидропилиндр 12 не обеспечивает опускание рукояти с захватным органом ниже поверхности земли, на которой стоит колесами трелевочная машина, го включается 1гидроцйлиндр 6. Гидрощлиндр 6 поворачивает раму 5 относительно оси 4 вместе с опорами 7, 8 и рукоятью 9 с захватным органом 1О. При этом рукоять 9 с захватным органом Ю опускаются ниже поверхности земли, и захватный орган подводится вплотную к пачке деревьев. Затем челюсти захватного органа замыкаются под пачкой и захватьшают ее. Далее обратным ходом пшрошшиндра 6 рама 5 возвращается в исходное. / положение. Затем включается гвдропилвндр 12 и возвращает рукоять 9 с опорами 7 и 8 в транспортное положение, поднимая захват и переднюю часть ачки деревьев над поверхностью земли. Разгрузка машины производится раскрытием челюстей захватного органа Ю. Предлагаемая конструкция трелевочной машины обладает, по сравнению с известными конструктивными решениями, таким преимуществом, как меньшая металлоемкость гидроцилиндров привода. Эта машина имеет расширенные техни- веские возможности, улучшающие ее эксплуатационные качества за счет увеличения зоны действия подвижной сттэелы с захватным органом и обеспечения взятия захватом поваленных деревьев, находящихся ниже уровня земли при работе на пересеченной местности и в г орных ус л овиях. Совокупность этих полезных свойств делает трелевочную машину более эффективной. Экономический эффект такой машины по сравнению с эксплуатирующимися в настошцее время увеличивается до 15%, Формула изобретения Трелевочная машина, содержащая самоходное шасси, на раме которого жестко закреплен кронштейн, на котором установлена плита с возможностью поворота вокруг горизонтальной оси посредством соединенного с ней своим штоком гидрошшиндра, при этом плита снабжена поворотной вокруг гортзонтальной оси стрелой с захватным органо1«4, отличающаяся тем, что, с Целью повшвения дксплуатационных качеств, она снабжена жестко закрепленной на плвте опорой, взаимодействующей с рамой в транспортном положении, а корпус гидрошлвндра шарнирно установлен на кронштейне. Источники информации, принятые во внимание при экспертизе 1. Патент США № ЗО1О560, кл. 214 - 147, опублик. 1961 (протоirai).
