ОБЛАСТЬ ТЕХНИКИ
[1] Настоящее изобретение относится к автоматизированным пипеткам, в частности, к роботизированным пипеточным устройствам, которые могут представлять собой пипетки с вытеснением воздуха.
УРОВЕНЬ ТЕХНИКИ
[2] Пипетки представляют собой ручные или автоматизированные устройства для выдачи сред, используемые для переноса точно определенного количества жидкости из одного сосуда в другой сосуд. Жидкость всасывают в одноразовый наконечник, прикрепленный к нижнему концу пипетки, и выдают из него.
[3] В цилиндрических пипетках с вытеснением воздуха выдача жидкости происходит при перемещении поршня вниз внутри цилиндра, в результате чего происходит вытеснение воздуха из цилиндра. Поршень имеет некоторый диапазон перемещения внутри цилиндра. Чтобы всосать в наконечник требуемый объем жидкости, конец наконечника помещают в жидкий препарат и отводят поршень до верхнего упора, втягивая, таким образом, требуемый объем жидкости. Затем, для выдачи требуемого объема жидкости наконечник пипетки помещают в сосуд для приема жидкости и перемещают поршень от верхнего упора до нижнего упора. Количество всасываемой и выдаваемой жидкости соответствует объему вытесненного воздуха.
[4] Ручные, т.е. управляемые вручную, пипетки для выдачи жидкости, как правило, содержат механизм для снятия наконечника, так что пользователю не нужно снимать наконечник, захватывая его рукой. Наконечник удерживается на месте на нижнем конце держателя наконечника или конуса для наконечника пипетки за счет трения. Чтобы отсоединить наконечник, пользователь нажимает на кнопку снятия наконечника, которая выполнена с возможностью управления большим пальцем пользователя и, как правило, расположена в верхней части пипетки, рядом с ручкой управления, используемой для всасывания и выдачи. Указанный механизм содержит втулку для снятия, выполненную с возможностью скольжения по цилиндрической части пипетки, и рычаг, прикрепленный к ней и выполненный с возможностью скольжения в ручке пипетки или по ее боковой стенке. Указанный механизм соединен с пружиной, которая толкает рычаг в верхнее положение. При нажатии рычага вниз втулка отсоединяет наконечник, прикрепленный к конусу для наконечника, т.е. к концу цилиндра. Как уже было отмечено, когда пользователь нажимает кнопку снятия наконечника, втулка для снятия перемещается вниз и сталкивает наконечник с держателя наконечника.
[5] В электронных автоматизированных пипетках снятие наконечника, как правило, осуществляют с использованием отдельного двигателя для снятия наконечника. В таких решениях, как правило, также используют возвратную пружину. Кроме того, существуют некоторые решения, в которых сама автоматизированная пипетка не содержит механизм снятия наконечника. Согласно решению, относящемуся к такому типу, наконечник снимают, например, путем приведения в движение конуса для наконечника (с прикрепленным наконечником) в коробке для использованных наконечников с функцией снятия (например, с помощью крючка или выемки) таким образом, что при приведении пипетки в движение или ее перемещении вверх наконечник снимается с конуса для наконечника.
[6] Вышеупомянутым решениям из предшествующего уровня техники присущи различные проблемы. Например, отдельная функция снятия наконечника предполагает чрезмерное перемещение пипетки. Кроме того, для возможности снятия наконечника следует применять коробку для использованных наконечников определенного типа. В решениях, согласно которым наконечник снимают с помощью отдельного двигателя, необходим более сложный и тяжелый механизм пипетки, что приводит к усложнению приведения в действие пипетки. Существуют решения, согласно которым наконечник снимают, перемещая весь узел.
[7] В публикации заявки на патента США 2003/0147781 раскрыта пипетка, содержащая корпус; рычаг, выполненный с возможностью перемещения относительно корпуса параллельно продольному направлению пипетки для выталкивания конуса, прикрепленного к корпусу; и кнопку для управления перемещением рычага. Пипетка расположена таким образом, что указанная кнопка прикладывает скользящее усилие к рычагу, в то время как рычаг перемещается относительно корпуса.
[8] В качестве альтернативы, как подробно описано в публикации заявки на европейские патент ЕР 3112026, ручная пипетка может содержать механизм снятия наконечника, выполненный с возможностью подъема внутреннего механизма пипетки относительно корпуса пипетки, когда пользователь нажимает на кнопку снятия наконечника. Данное раскрытие также относится к способу отсоединения одноразового наконечника, прикрепленного к конусу для наконечника пипетки согласно настоящему изобретению, и к способу пипетирования с помощью пипетки согласно настоящему изобретению. Однако, в отличие от настоящего раскрытия, согласно раскрытию в указанном документе первый механизм используют для передачи первой движущей силы в цилиндр для выдачи жидкости, а второй механизм используют для передачи второй движущей силы.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[9] Настоящее изобретение определяется признаками из независимых пунктов формулы изобретения. Некоторые конкретные варианты осуществления определены в зависимых пунктах формулы изобретения.
[10] Согласно первому аспекту настоящего изобретения предложена система автоматизированной пипетки, содержащая неподвижную контактную поверхность, узел выталкивателя, содержащий держатель наконечника пипетки, двигатель, выполненный с возможностью перемещения узла выталкивателя в первом направлении таким образом, что наконечник вступает в контакт с контактной поверхностью и отсоединяется от держателя.
[11] Согласно второму аспекту настоящего изобретения предложен способ снятия наконечника, прикрепленного к держателю наконечника модуля пипетки, включающий использование двигателя, выполненного с возможностью приведения в движение узла выталкивателя модуля пипетки в первом направлении относительно корпуса модуля таким образом, что наконечник вступает в контакт с поверхностью корпуса модуля и отсоединяется.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
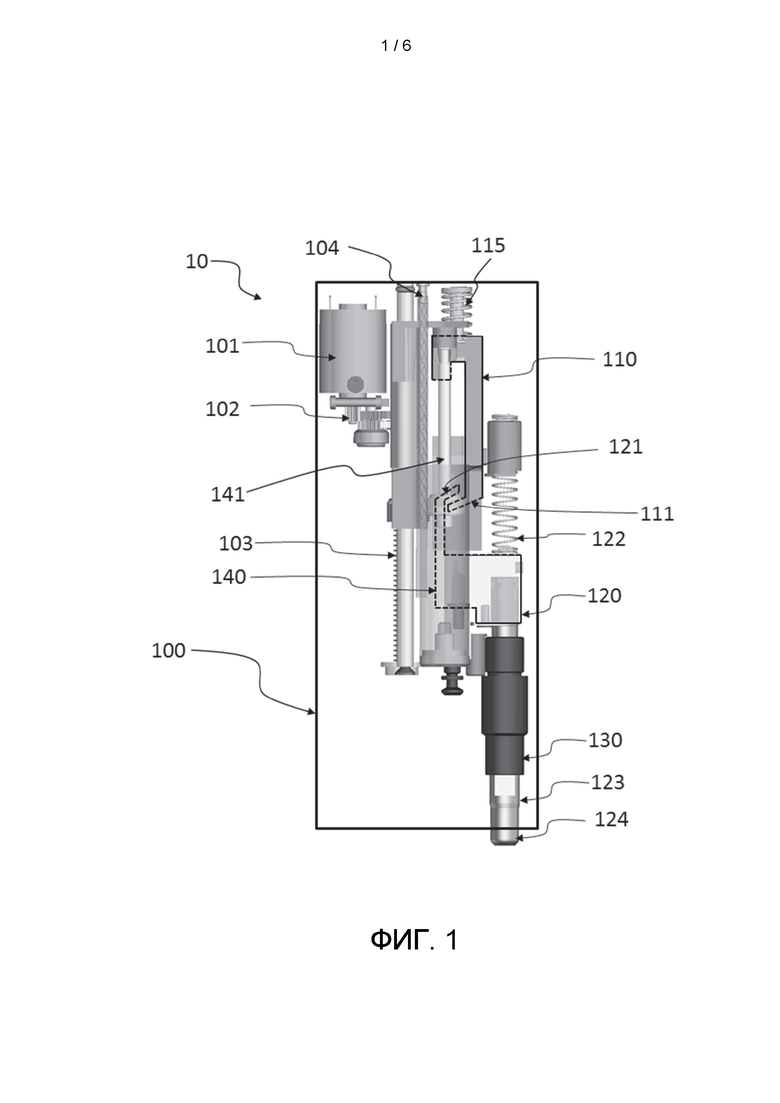
[12] На ФИГ. 1 представлен схематический вид модуля автоматизированной пипетки в соответствии по меньшей мере с некоторыми вариантами осуществления настоящего изобретения, и
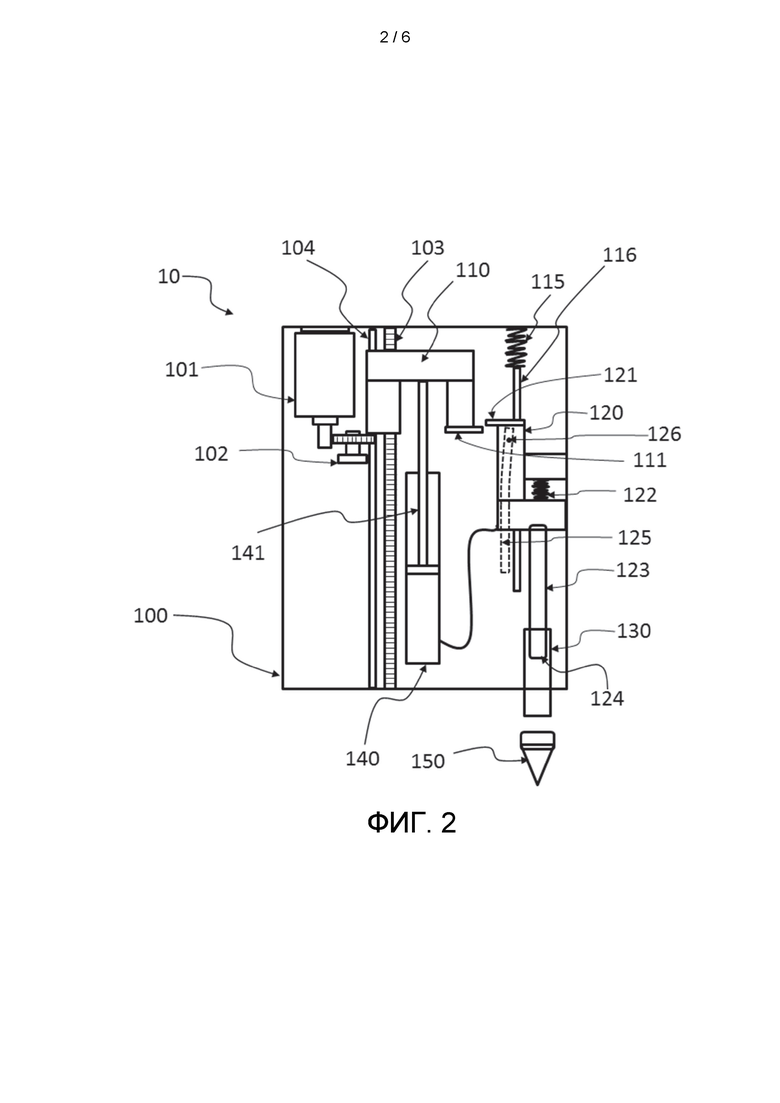
[13] на ФИГ. 2 представлен схематический вид модуля 15 автоматизированной пипетки, в котором использован элемент для разъединения и паз для разъединения, в соответствии по меньшей мере с некоторыми вариантами осуществления настоящего изобретения, и
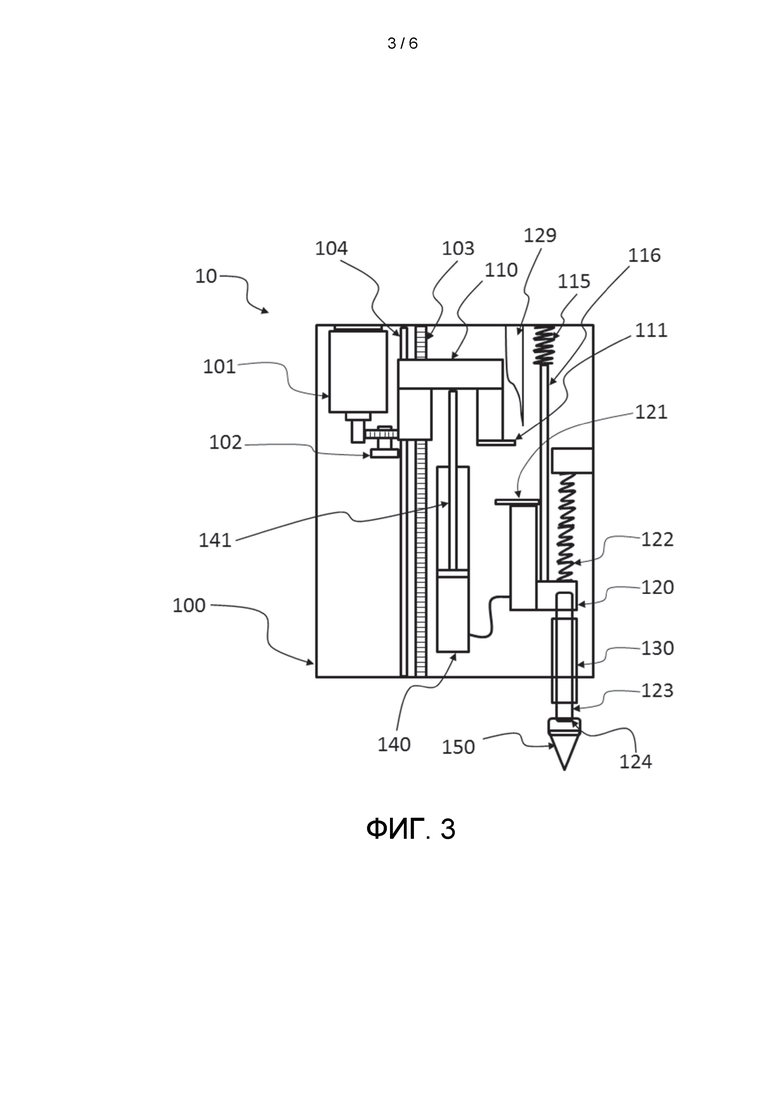
[14] на ФИГ. 3 представлен схематический вид модуля автоматизированной пипетки, в котором использована направляющая для разъединения, в соответствии по меньшей мере с некоторыми вариантами осуществления настоящего изобретения, и
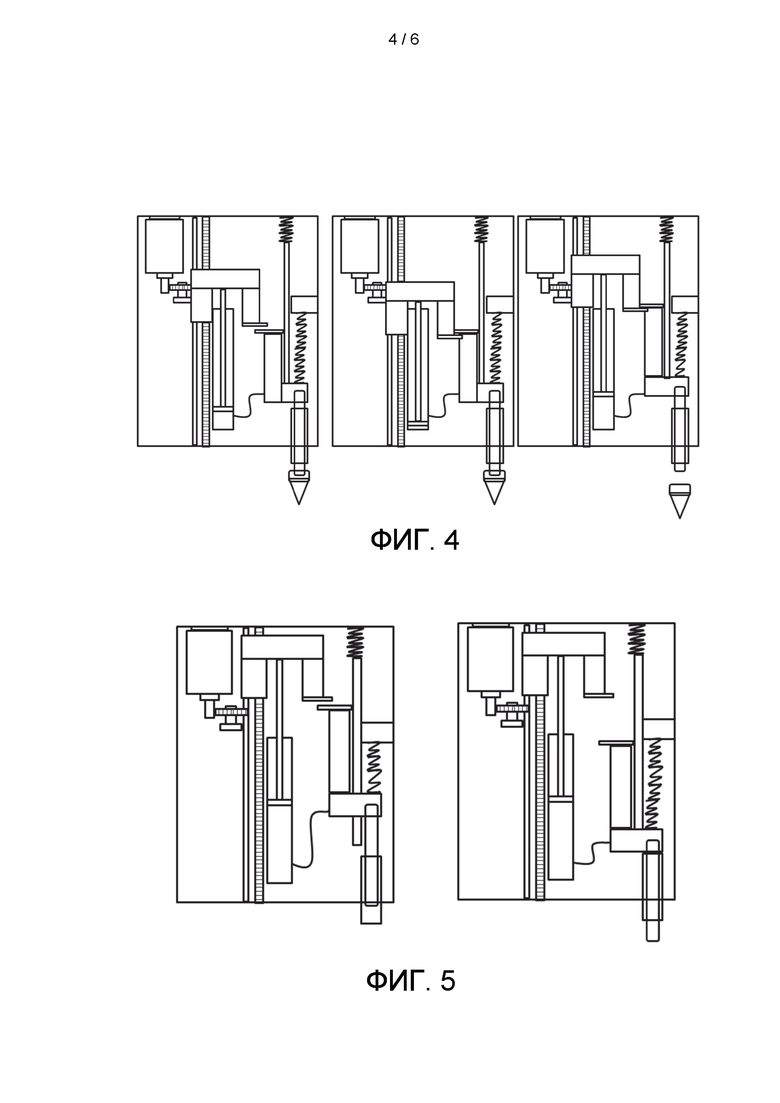
[15] на ФИГ. 4 представлен схематический вид последовательности снятия наконечника пипетки в соответствии по меньшей мере с некоторыми вариантами осуществления настоящего изобретения;
[16] на ФИГ. 5 представлен схематический вид отсоединения узла выталкивателя от узла скольжения в соответствии по меньшей мере с некоторыми вариантами осуществления настоящего изобретения, и
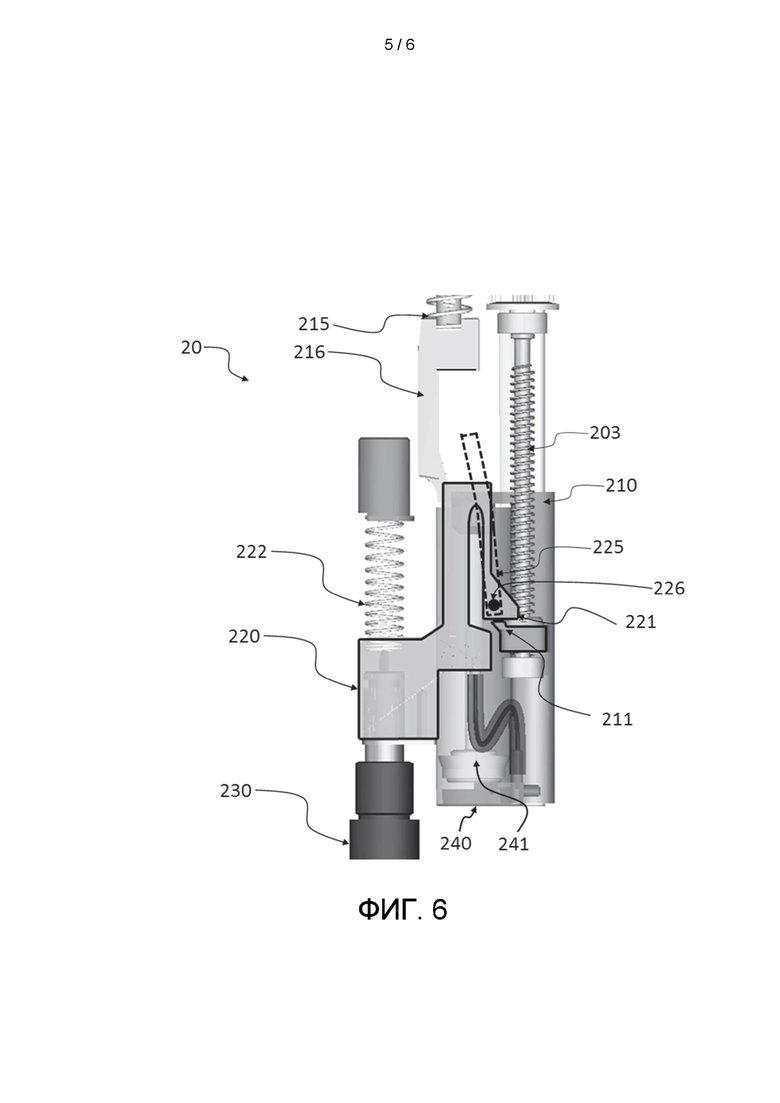
[17] на ФИГ. 6 представлен схематический вид модуля автоматизированной пипетки, в котором использован элемент для разъединения и паз для разъединения, в соответствии по меньшей мере с некоторыми вариантами осуществления настоящего изобретения, и
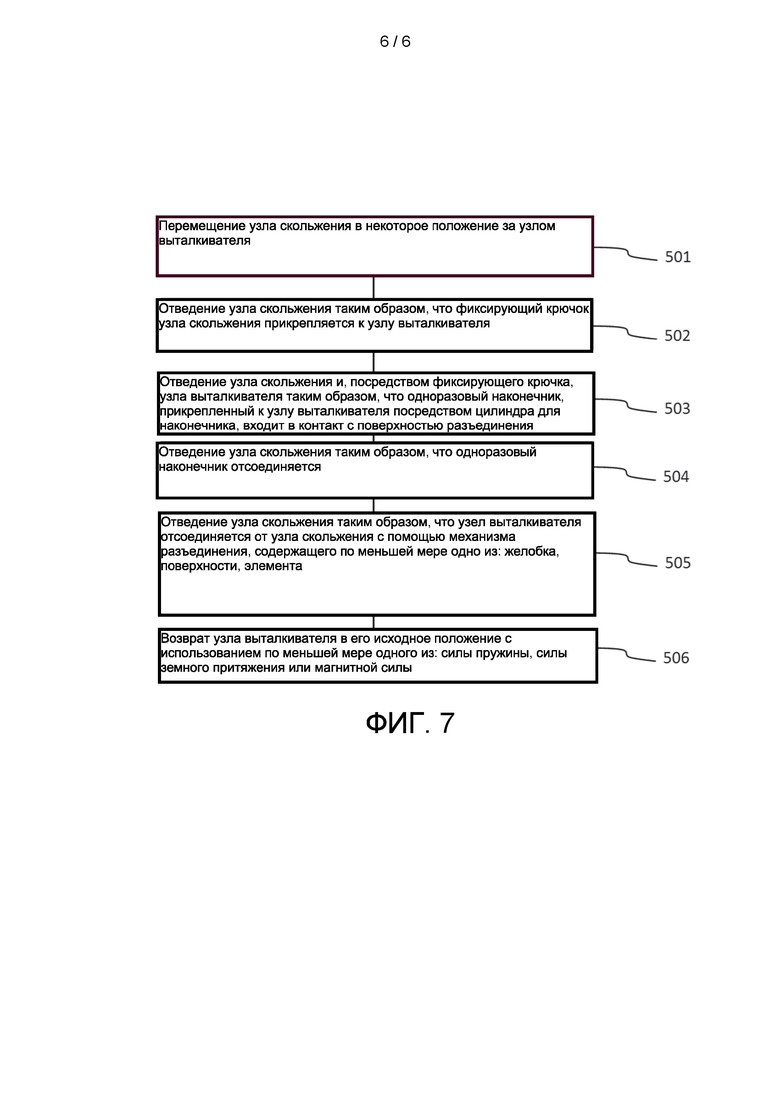
[18] на ФИГ. 7 представлена блок-схема последовательности операций способа согласно по меньшей мере некоторым вариантам осуществления настоящего изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[19] В настоящем контексте термин «пипетка» предназначен для обозначения устройства выдачи сред и работы со средами, такого как микропипетка, используемая в химических, биологических и медицинских целях. В такой пипетке может быть использовано вытеснение воздуха, прямое вытеснение или, например, могут быть применены объемометрические технологии. Кроме того, термин «узел» предназначен для обозначения механизма, содержащего по меньшей мере один механический элемент и поддерживающие компоненты, такие как шестерни, винты, крючки, магниты, электрические и электромеханические компоненты. Наконец, термин «одноразовый наконечник» относится к инструментам для однократного использования, как правило, изготовленным из пластмассы (например, полипропилена), или в некоторых случаях из других материалов, таких как пластмасса, причем пластмасса может быть заполнена углеродным волокном или другими добавками. Объемы наконечников различаются и, например, могут варьироваться от 10 микролитров до 10 миллилитров, однако в контексте настоящего изобретения используют как большие, так и меньшие объемы.
[20] Как правило, наконечник для многократного использования снимают с пипетки с помощью «втулки», которая быстро опускается и сталкивает наконечник с держателя наконечника. При использовании вышеупомянутого способа снятие наконечника может произойти с большой скоростью, в результате чего отсоединенный наконечник перемещается с чрезмерной скоростью. Изобретение согласно настоящему раскрытию позволяет осторожно сдвинуть наконечник пипетки, таким образом, снимая наконечник с минимальной скоростью. Это позволяет уменьшить разбрызгивание, уменьшить риск загрязнения и необходимость очистки.
[21] На ФИГ. 1 представлен схематический вид пипеточной системы в соответствии по меньшей мере с некоторыми вариантами осуществления настоящего изобретения. Автоматизированная пипетка согласно настоящему изобретению состоит из модуля 10, состоящего по меньшей мере из одного двигателя 101, необязательного передаточного механизма 102, по меньшей мере одного ходового винта 103, по меньшей мере одной линейной направляющей 104, по меньшей мере одного узла 110 скольжения и фиксирующего крючка 111, по меньшей мере одного цилиндра 140 и поршня 141, узла 120 выталкивателя, содержащего фиксирующий язычок 121, пружину 122 выталкивателя и электронные схемы управления. Узел 120 выталкивателя также может упоминаться как подвижный элемент выталкивателя или узел выталкивателя. Кроме того, пипетка содержит держатель 123, направляющую 130 держателя, полость, проходящую через корпус в продольном направлении, и конус 124 для наконечника (также известный как носовой конус), который обычно имеет слегка скошенную кромку для размещения одноразового наконечника 150. В качестве альтернативы, конус для наконечника может содержать верхний кольцевой выступ и нижний кольцевой выступ, причем нижний кольцевой выступ имеет меньший диаметр, чем верхний кольцевой выступ. Кроме того, пипетка может содержать подпружиненный конус для наконечника, т.е. регулируемый элемент жесткости, содержащий пружину 115, и механизм, выполненный с возможностью задерживания 116, такой как система Optiload™. Такая система обеспечивает простой способ ограничения максимальной величины силы, которая может быть использована при выполнении таких задач, как захват наконечника пипетки.
[22] В некоторых вариантах осуществления компоненты пипетки могут содержать механическое сочленение в виде зубчатого колеса с рейкой. Указанные компоненты также могут содержать линейные направляющие, оси, средства сочленения, пружины, магниты, передаточные механизмы, крепления для компонентов, а также компоненты для работы с жидкостью, такие как трубки или шланги. Кроме того, указанный модуль может содержать одно или более из следующего: процессор, печатную монтажную плату, датчики, такие как камеры или оборудование для создания изображений, соединители для беспроводной и проводной связи, соединители для беспроводной и проводной передачи мощности, пассивные или активные охлаждающие элементы.
[23] В первом примере осуществления настоящего изобретения электродвигатель 101 приводит в движение механизм линейного перемещения посредством передаточного механизма 102, содержащего по меньшей мере одно из следующего: шестерню, шестерню планетарной передачи, муфту, ремень, синхронизированный ремень, клиновидный ремень, зубчатый ремень, ремень с пазами. Механизм линейного перемещения может содержать, например, ходовой винт 103 и/или линейную направляющую 104. Механизм линейного перемещения соединен с узлом 110 скольжения и, таким образом, с поршнем 141. Таким образом, в этом примере осуществления приведение в действие двигателя 101 в первом направлении (т.е. по часовой стрелке или против часовой стрелки) приводит к тому, что узел 110 скольжения также перемещается в первом направлении. Это также верно для обратного направления вращения двигателя, т.е. приведение в действие двигателя в обратном направлении приведет к перемещению узла скольжения в обратном направлении. При этом, поршень 141 перемещается внутри цилиндра 140. Результирующее давление в цилиндре используют для выдачи жидкости через держатель 123 наконечника и наконечник 150. Количество всасываемой и выдаваемой жидкости соответствует объему вытесненного воздуха.
[24] Кроме того, в первом примере осуществления узел 110 скольжения выборочно соединяют с узлом 120 выталкивателя посредством средства сочленения или передаточного механизма. Таким образом, узел выталкивателя не всегда приводится в движение при приведении в движение узла скольжения, что обеспечивает нормальное функционирование системы выдачи жидкости без перемещения узла выталкивателя. Как уже было отмечено, во время выдачи жидкости узел выталкивателя может быть неподвижным в нормальном (нижнем) положении. В примере осуществления, показанном на ФИГ. 4, узел выталкивателя приводят в движение следующим образом:
1. Двигатель 101 приводит в движение узел 110 скольжения в первом направлении (вниз).
2. Фиксирующий крючок 111 узла скольжения проходит мимо фиксирующего язычка 121 узла выталкивателя.
3. Двигатель 101 приводит в движение узел 110 скольжения во втором направлении (вверх).
4. Фиксирующий крючок 111 узла скольжения вступает в контакт с фиксирующим язычком 121 узла 120 выталкивателя.
5. Узел скольжения, соединенный с узлом 120 выталкивателя посредством крючка 111 и язычка 121, тянет узел 120 выталкивателя во втором направлении.
6. Узел 120 выталкивателя соединен с держателем 123 наконечника и, таким образом, с наконечником 150. Держатель 150 наконечника перемещается внутри направляющей 130 держателя и, таким образом, в результате перемещения вверх узла 110 скольжения и узла 120 выталкивателя держатель наконечника и наконечник перемещаются во втором направлении. Таким образом, держатель наконечника втягивается в корпус 100 модуля.
7. Верхняя поверхность наконечника 150 вступает в контакт с корпусом 100 модуля и результирующая сила обеспечивает снятие наконечника с конуса 124 для наконечника (нижнего конца держателя 123).
8. После снятия наконечника с конуса для наконечника и, необязательно, по прошествии периода заданной задержки, узел выталкивателя перемещается вверх и вступает в контакт с направляющей наклонной поверхностью, которая отделяет крючок 111 и язычок 121 друг от друга.
9. Узел выталкивателя возвращается в свое нижнее положение благодаря по меньшей мере одному из: силы тяжести, магнитной силы или силы пружины.
Этапы способа представлены на ФИГ. 7.
[25] В некоторых из вариантов осуществления настоящего изобретения, включая первый пример осуществления, снятие наконечника выполняют путем отведения держателя 123 наконечника (соединенного с узлом 120 выталкивателя) в корпус 100 модуля таким образом, что верхний край или верхняя поверхность наконечника 150 вступает в контакт с корпусом модуля и при продолжении отведения держателя 123 наконечник задерживается корпусом 100 и снимается с держателя. В некоторых вариантах осуществления наконечник может вступать в контакт с компонентом, неподвижно или подвижно прикрепленным к корпусу. Наконечник может вступать в контакт с неподвижной контактной поверхностью, а именно, с неподвижно прикрепленным элементом или частью корпуса модуля, такой как по меньшей мере один из следующих элементов: выступ, выемка, подшипник, штифт. В некоторых вариантах осуществления контактная поверхность может быть гибкой, такой как по меньшей мере одно из следующего: пружина, амортизатор. Кроме того, наконечник можно снять, сначала отводя держатель до тех пор, пока наконечник не соприкоснется с корпусом, что определяют путем вычисления, измерения силы, измерения проводимости, измерения расстояния и т.д., а затем приведения в движение держателя дальше в направлении вверх. В некоторых вариантах осуществления снятие наконечника может быть выполнено таким образом, что держатель отводят с первой скоростью до тех пор, пока поверхность наконечника не соприкоснется с корпусом модуля, а действие сдвигания выполняют путем отведения держателя со второй скоростью или согласно профилю скорости, в соответствии с которым скорость сначала является низкой и возрастает экспоненциально или наоборот.
[26] Во время снятия наконечника корпус 100 пипетки может оставаться неподвижным. Держатель 123 наконечника прикреплен к корпусу посредством направляющей 130 держателя, которая фиксирует держатель в боковых направлениях, но допускает перемещение вверх-вниз.
[27] Непосредственно до, во время и после сдвигания наконечника с держателя наконечника перемещение узла выталкивателя может задерживаться пружиной, магнитом, зафиксированным компонентом или их комбинацией, например, пружиной узла выталкивателя, или же дополнительно или альтернативно, узлом скольжения. В некоторых вариантах осуществления узел выталкивателя в верхнем положении задерживается узлом скольжения и пружиной выталкивателя. Перемещение наконечника вверх может задерживаться до тех пор, пока наконечник не будет сдвинут.Это позволяет втягивать наконечник до верхнего предела, все еще удерживая его. Это может быть выполнено по любой причине, например, когда с помощью второго, одновременно используемого модуля осуществляют захват нового наконечника или если модуль по какой-либо причине не используют. Положение узла выталкивателя в том момент, когда его задерживают, может включать верхнее (втянутое) положение узла выталкивателя или, например, 90-99% диапазона перемещения узла выталкивателя. В другом примере осуществления положение узла выталкивателя соответствует 95% от диапазона перемещения при задерживании.
[28] На ФИГ. 4 изображен процесс снятия наконечника. На самом левом изображении на ФИГ. 3 модуль автоматизированной пипетки работает с задействованным механизмом Optiload. Узел скольжения не соединен с механизмом выталкивателя. На среднем изображении узел скольжения перемещен в нижнее положение таким образом, что фиксирующий крючок обходит фиксирующий язычок. На самом правом изображении узел скольжения перемещен вверх и тянет за собой узел выталкивателя. Механизм Optiload не задействован. На самом правом изображении в результате перемещения вверх узла выталкивателя держатель наконечника перемещается внутри направляющей держателя, при этом одноразовый наконечник вступает в контакт с направляющей держателя наконечника и происходит его снятие.
[29] На ФИГ. 5 показан процесс отсоединения узла выталкивателя от узла скольжения. В продолжение процесса, изображенного на ФИГ. 4, на самом левом изображении на ФИГ. 5 узел выталкивателя был поднят узлом скольжения посредством фиксирующего крючка и фиксирующего язычка. Система Optiload не задействована и видна за узлом выталкивателя. Однако, как показано на фигуре, фиксирующие компоненты были отсоединены друг от друга. Средство отсоединения не показано на ФИГ. 5, но в соответствии с вариантами осуществления, описанными в данном документе, например, разделительный элемент 129 вступал в контакт с фиксирующим крючком и фиксирующим язычком. На самом правом изображении на ФИГ. 5 видно, что узел выталкивателя был возвращен в нижнее положение и задействована система Optiload. Узел скольжения остается в верхнем положении и модуль пипетки готов к работе. Захват нового наконечника облегчает система Optiload, придающая жесткость модулю выталкивателя в этом примере осуществления. Данный процесс более подробно описан в последующих пунктах.
[30] По меньшей мере в некоторых вариантах осуществления настоящего изобретения указанное разделение может быть выполнено с использованием направляющей наклонной поверхности 129. В первом варианте осуществления, для возврата пипетки в нормальный режим работы узел 110 скольжения (прикрепленный к узлу 120 выталкивателя посредством фиксирующего крючка 111 и фиксирующего язычка 121) перемещают вверх. В некоторой точке перемещения вверх узел выталкивателя, узел скольжения или их комбинация вступают в контакт с направляющей 129, которая отделяет фиксирующий язычок от крючка. Направляющая 129 может иметь по меньшей мере одну наклонную поверхность, причем узел выталкивателя вступает в контакт с указанной поверхностью во время перемещения, а наклон поверхности обеспечивает отделение фиксирующего язычка от крючка.
[31] В некоторых вариантах осуществления указанную наклонную поверхность содержит узел выталкивателя, узел скольжения или оба узла, т.е. направляющая выполнена за одно целое по меньшей мере с одним из указанных узлов. Разделение может быть выполнено за счет вступления в контакт с язычком или с крючком, причем указанный контакт влияет на путь перемещения язычка или крючка (поскольку узел скольжения и узел выталкивателя перемещают вверх даже в момент их контакта с направляющей). Как уже было отмечено, перемещение вверх используют для приведения в движение компонентов и неподвижная направляющая прижимает одно из фиксирующего язычка или крючка к другому компоненту. Следует понимать, что в примере осуществления путь язычка или крючка после контакта с наклонной или изогнутой направляющей не будет линейным. Наоборот, путь перемещения компонента будет представлять собой кривую, в то время как другой компонент будет продолжать перемещаться в другом направлении (например, по линейному пути). В некоторых вариантах осуществления материал язычка или крючка будет деформироваться или изгибаться при вступлении направляющей в контакт с язычком или крючком. Пространство, образованное между соответствующими компонентами, позволит узлу выталкивателя обойти крючок и вернуться в нижнее, нормальное положение. Альтернативно, в конфигурации с двумя направляющими, оба фиксирующих компонента могут вступать в контакт с направляющей поверхностью. Направляющая поверхность может содержать пазовый путь, причем указанный путь может быть линейным или выполненным в виде кривой любого типа, проходящей в трех измерениях.
[32] В вариантах осуществления настоящего изобретения направляющая наклонная поверхность может быть наклонена в любой плоскости относительно компонентов. В приведенном в качестве примера изменении первого варианта осуществления фиксирующий крючок перемещается (отклоняется) в боковом направлении относительно направления перемещения. Это происходит в результате перемещения вверх в сочетании с перемещением по направляющей поверхности. Следует отметить, со ссылкой на ФИГ. 3, что направляющая наклонная поверхность 129 толкает или поднимает фиксирующий крючок 111 или фиксирующий язычок 121 в направлении глубины согласно схеме. В альтернативных вариантах направляющая наклонная поверхность (-и) может находиться в любой из двух остальных плоскостей, т.е. компоненты могут поворачиваться относительно продольной оси или поперечной оси относительно направления движения. Как уже было отмечено, направляющая наклонная поверхность может быть ориентирована параллельно узлу выталкивателя, перпендикулярно узлу выталкивателя или же параллельно или перпендикулярно с любым относительным поворотом в направлении по часовой стрелке или против часовой стрелки. В еще одном примере осуществления направляющая наклонная поверхность параллельна узлу выталкивателя и повернута на 60° по часовой стрелке относительно более длинной оси.
[33]По меньшей мере в некоторых вариантах осуществления настоящего изобретения указанное разделение может быть выполнено с использованием по меньшей мере одного из направляющего элемента 126, 226 и направляющего паза или направляющего паза 125, 225. Направляющий элемент может быть расположен на узле выталкивателя, узле скольжения или на обоих узлах. Направляющий элемент может быть ориентирован под углом 90° относительно направления движения. Направляющий элемент может содержать по меньшей мере одно из следующего: штифт, пружину, подшипник. Направляющий элемент может находиться в контакте с направляющим пазом, образованным в корпусе модуля или в какой-либо другой детали. Когда указанный узел перемещают вверх, направляющий элемент перемещается внутри направляющего паза. В некоторой точке перемещения направляющий паз изгибается, отклоняясь от направления перемещения, благодаря чему обеспечивается разделение указанных узлов. Затем узлы возвращаются в требуемые положения в соответствии с вариантами осуществления, описанными в данном раскрытии.
[34] Узел выталкивателя также может выполнять по меньшей мере одну из дополнительных функций: опора датчика, трубопровод или соединитель для датчиков. В некоторых вариантах осуществления предпочтительно, чтобы узел выталкивателя был изготовлен из непроводящего материала или содержал дорожки для передачи сигнала. Это позволит проводить определение положения наконечника (например, наличия наконечника) с применением проводимости, поскольку держатель наконечника обычно выполняют из металла. Кроме того, это позволяет определять уровень жидкости с помощью проводящих наконечников пипеток, таких как угленаполненные наконечники пипеток, с использованием, например, принципа емкостного измерения, а также обнаруживать изменение, например, положения пипетки.
[35] Фиксирующий язычок узла выталкивателя может содержать механические пазы, ответвления и т.д., предназначенные для обеспечения управляемой деформации язычка. Такая управляемая деформация, т.е. изгиб или кручение, может быть использована для того, чтобы язычок мог пропустить фиксирующий крючок. После того как указанное прохождение будет завершено, упругость материала язычка позволит язычку вернуться к его первоначальной форме, или конструкцию оснащают пружинным элементом для усиления указанного действия возврата. Например, верхняя поверхность язычка может иметь наклон, благодаря которому при перемещении вниз крючок направляется в сторону от язычка. Затем язычок отгибается в сторону, позволяя крючку пройти мимо него. Когда передняя часть крючка пройдет мимо язычка, он вернется к своей первоначальной форме. Когда крючок вернется к своей первоначальной форме, верхняя поверхность крючка соприкасается с нижней поверхностью язычка, образуя механическое соединение. Указанное соединение используют для перемещения узла выталкивателя, чтобы сдвинуть наконечник с держателя наконечника, как обсуждалось выше.
[36] В некоторых вариантах осуществления в соответствии с настоящим изобретением узел выталкивателя нежестко фиксируют в нижнем положении по меньшей мере с помощью возвратной пружины выталкивателя. В вариантах осуществления в соответствии с настоящим изобретением возвратная пружина выталкивателя и механизм Optiload обеспечивают требуемую степень перемещения узла выталкивателя и, таким образом, держателя наконечника, как подробно описано в другом месте настоящего раскрытия. На нижней границе узла выталкивателя также имеется амортизатор удара или соударения, поскольку возвратная пружина выталкивателя обеспечивает высокую скорость перемещения.
[37] Согласно одному изменению первого варианта осуществления узел выталкивателя соединен с узлом скольжения посредством электромагнита вместо полностью механического сочленения. Узел скольжения при его перемещении вниз приближается к верхней секции узла выталкивателя и соединение, а также последующее разъединение осуществляют путем отправки сигнала на магнит (магниты).
[38] Согласно другим изменениям первого примера осуществления модуль автоматической пипетки содержит пружину 115 и систему 116 элемента жесткости, например, механизм Optiload. Целью применения такого механизма является обеспечение конфигурации, в которой держатель наконечника пипетки выполнен с возможностью нежесткой фиксации на месте. Механизм Optiload функционирует следующим образом: когда узел выталкивателя перемещают в относительно низкое положение, механизм Optiload перемещается в положение между механизмом выталкивателя и верхней частью корпуса модуля таким образом, что указанный механизм вступает в контакт с верхней частью корпуса модуля и узлом выталкивателя, как показано на ФИГ. 3. Это приводит к тому, что элемент жесткости действует как ограничитель силы захвата наконечника или гаситель ударных нагрузок, т.е. значительная часть силы, действующей на держатель наконечника, передается на элемент жесткости. Кроме того, верхний конец элемента жесткости соединен с пружиной. Она обеспечивает требуемую величину вертикального перемещения узла выталкивателя и, таким образом, держателя наконечника. Величина вертикального перемещения соответствует силе, приложенной к держателю наконечника, и, таким образом, оба значения могут быть настроены или предварительно настроены пользователем. В других примерах осуществления регулирование расстояния перемещения Optiload (т.е. расстояния вертикального перемещения) или величины требуемой силы, прежде чем механизм будет втянут в модуль, может быть обеспечено по меньшей мере с помощью одного из: винта, расположенного параллельно направлению перемещения, винта, расположенного перпендикулярно направлению перемещения, цилиндра, регулируемой пружины, выборочно деформируемого материала.
[39] Следует понимать, что взаимодействие механизма Optiload может включать вертикальное, горизонтальное или боковое перемещение, деформацию, линейные пути, нелинейные пути по меньшей мере на одном из компонентов, включая узел выталкивателя и элемент жесткости Optiload. Система Optiload может быть выведена из положения повышения жесткости различными способами, описанными далее в данном раскрытии.
[40] Использование системы Optiload обеспечивает преимущества в модулях автоматизированных пипеток. Например, при захвате (т.е. прикреплении) наконечника к держателю наконечника путем тугой прессовой посадки сила, прикладываемая к наконечнику, также обязательно будет влиять на внутренние механизмы модуля пипетки, такие как узел скольжения и передаточный механизм. Такое воздействие может быть негативным для компонентов. Однако при использовании механизма Optiload указанная сила гасится и амортизируется механизмом Optiload, что позволяет уменьшить износ компонентов. Система Optiload обеспечивает постоянную силу захвата наконечника независимо от скорости модуля во время осуществления захвата. Постоянная сила захвата обеспечивает оптимальную герметизацию наконечника, и сила, требуемая для отсоединения наконечника пипетки, будет находиться в разумных пределах. Другим вариантом управления силой захвата наконечника является управление перемещением модуля в направлении оси Z во время захвата на основании, например, текущих данных от двигателя (-ей), или обеспечение аналогичной системы с жесткой пружиной для всего модуля. Указанные подходы являются сложными и требуют обеспечения высокой степени точности, а также пространства для реализации системы по сравнению с системой Optiload, описанной в данном документе. Кроме того, в вариантах многоканального модуля реализация одноканальной пружины очень сложна. Наконец, наличие отдельной системы Optiload в каждом модуле позволяет использовать в модулях наконечники разных размеров, а также пружины с разными коэффициентами жесткости в каждом модуле.
[41] Выведение из зацепления системы Optiload может быть выполняться по-разному в разных вариантах осуществления. Например, указанное выведение из зацепления может быть выполнено с помощью по меньшей мере одного из следующего: направляющей наклонной поверхности, магнита, электромагнита, двигателя, пружины, комбинации электромагнита и пружины. Применительно к выведению из зацепления системы Optiload, в вариантах осуществления настоящего изобретения направляющая наклонная поверхность может быть наклонена в любой плоскости относительно указанных компонентов, аналогично направляющей наклонной поверхности узла выталкивателя, описанной выше. В альтернативных вариантах направляющая наклонная поверхность (-и) может находиться в любой из двух остальных плоскостей, т.е. компоненты могут поворачиваться относительно продольной оси или поперечной оси относительно направления движения. Как уже было отмечено, направляющая наклонная поверхность может быть ориентирована параллельно узлу выталкивателя, перпендикулярно узлу выталкивателя или же параллельно или перпендикулярно с любым относительным поворотом в направлении по часовой стрелке или против часовой стрелки. В еще одном примере осуществления направляющая наклонная поверхность параллельна узлу выталкивателя и повернута на 60° по часовой стрелке относительно более длинной оси.
[42]Во втором примере осуществления ходовой винт соединен с узлом скольжения посредством рычага, который содержит по меньшей мере два элемента и по меньшей мере одно соединение. В этом варианте осуществления узел скольжения жестко соединен с узлом выталкивателя. Указанное сочленение позволяет выдавать жидкость, используя нормальный диапазон перемещения ходового винта. Когда ходовой винт перемещают в крайнее нижнее положение, угол рычага является таким, что узел выталкивателя перемещается вверх относительно корпуса модуля. Указанным перемещением можно точно управлять, так что может быть обеспечено точное снятие наконечника, как и в других вариантах осуществления, описанных в данном документе. Данный вариант осуществления также можно рассматривать как тип выборочного сочленения, поскольку двигатель выполнен с возможностью перемещения узла скольжения без приведения в движение узла выталкивателя. Одно преимущество данного варианта осуществления состоит в том, что указанный рычаг позволяет применять ходовой винт меньшей длины по сравнению со случаем, когда узел скольжения жестко соединен с ходовым винтом. Другие преимущества заключаются в том, что соотношение сил можно отрегулировать таким образом, чтобы максимальный крутящий момент был достигнут в точке снятия наконечника, т.е. чтобы крутящий момент не был постоянным во всем диапазоне перемещения, а увеличивался в точке снятия наконечника, которая, конечно же, является точкой, в которой указанная дополнительная сила наиболее необходима. Кроме того, в конструкции этого типа потери на трение минимальны. Во втором примере осуществления также может быть использована система Optiload, описанная ранее в данном документе.
[43] В некоторых вариантах осуществления настоящего изобретения люфт, зазор или просвет механизмов можно устанавливать или регулировать для повышения точности механических перемещений, компонентов для работы с жидкостями, функции снятия наконечника и, в наконец, функции выдачи жидкости. Указанные регулировки могут быть выполнены с использованием по меньшей мере одного из следующего: магнита, пружины, схем управления, включающих, без ограничений, управление с обратной связью и управление с прямой связью.
[44] В некоторых вариантах осуществления в соответствии с настоящим изобретением дополнительно или альтернативно используют сочетание датчиков для точного обнаружения линейного перемещения механизмов, содержащих пипетку. Они также обеспечивают компенсацию, регулировку и калибровку, которые могут быть выполнены на основании переменных величин, таких как температура, влажность. В некоторых вариантах осуществления модуль пипетки имеет функцию определения уровня жидкости.
[45] Настоящее изобретение, подробно описанное в настоящем раскрытии, обеспечивает несколько технических преимуществ. Выборочное сочленение между узлом скольжения и узлом выталкивателя позволяет управлять функциями вытеснения жидкости без перемещения узла выталкивателя. Кроме того, это обеспечивает более точную работу цилиндра, поскольку масса и инерция подлежащих перемещению компонентов уменьшаются, поскольку задействуется только некоторое подмножество из всего механизма для пипетирования. Основное преимущество настоящего изобретения состоит в компактном размере всего модуля, поскольку отдельный двигатель для снятия наконечника или электромеханический исполнительный механизм не требуются. Кроме того, в случае использования настоящего изобретения отдельный механизм, встроенный в контейнер для снятых наконечников, не требуется и, таким образом, к устройству прилагают меньшую силу.
[46] Еще одно преимущество настоящего изобретения, подробно описанное в настоящем раскрытии, заключается в том, что управляемое и осторожное снятие наконечника, обеспечиваемое жестким и управляемым с высокой точностью механизмом, снижает вероятность загрязнения за счет того, что: при использовании настоящего изобретения наконечник не покидает держатель наконечника и не ударяется о контейнер с высокой скоростью, что потенциально могло бы привести к разбрызгиванию капель, которые могут загрязнять образцы или поверхности. Другое преимущество изобретения заключается в том, что указанный механизм позволяет собирать и хранить такие данные, как профиль силы для процесса снятия наконечника и точное положение снятия наконечника. Эти данные сохраняются в процессе снятия наконечника. Указанные данные применяют для анализа работы системы, например, для анализа надежности. Например, если на снятие наконечника постоянно требуется все меньшая и меньшая сила, это может указывать на проблему с конусом для наконечника, поскольку наконечник может не прикрепляться к конусу для наконечника в ходе последующих операций захвата. Или же, в некоторых ситуациях, скользкое вещество, такое как масло, может покрыть конус для наконечника и затруднить прикрепление наконечника к конусу для наконечника. В соответствии с настоящим изобретением могут использовать диагностическое техническое обслуживание для предупреждения возникновения подобных проблем. Указанный анализ может включать сравнение профиля силы для процесса снятия, причем анализ может проводиться во время работы или когда устройство не используется.
[47] Отводимый держатель в вариантах осуществления, раскрытых в данном документе, также позволяет пипетке выборочно уступать действию внешних сил, т.е., если наконечник пипетки вступает в контакт с неподатливой поверхностью, узел выталкивателя втягивается в корпус пипетки. Указанная функция может позволить избежать повреждения или чрезмерного износа механизма пипетки. Указанную функцию обеспечивают путем применения комбинации пружины выталкивателя, а также системы Optiload, в частности, пружины Optiload. Сначала сжимается пружина выталкивателя, а затем, например, через 0,2-1 миллиметра, сжимается пружина Optiload. Когда в механизме пипетки происходит задействование узла выталкивателя, систему Optiload выводят из зацепления, чтобы перемещению противодействовала меньшая сила. Система Optiload также позволяет обнаруживать момент вступления наконечника пипетки в контакт с поверхностью. В частности, поскольку положение узла выталкивателя определяется, когда наконечник вступает в контакт с поверхностью, узел выталкивателя будет слегка перемещаться и это перемещение распознается устройством. Пружина Optiload предотвращает повреждение модуля во время выполнения этого действия.
[48] На ФИГ. 6 показан третий пример осуществления в соответствии с настоящим изобретением. Для ясности на фигуре опущены некоторые компоненты, такие как двигатель, передаточный механизм и т.д. Данный вариант осуществления функционирует аналогично вышеупомянутым вариантам осуществления. Как видно из фигуры, компоненты взаимодействуют в других местах по сравнению с другими вариантами осуществления, например, фиксирующий крючок 211 расположен рядом с линейным винтом 203, а механизм 216 Optiload выполнен с возможностью взаимодействия с узлом 220 выталкивателя в несколько другом положении, чем в предыдущем варианте осуществления. Разъединение узла 220 выталкивателя и узла 210 скольжения осуществляют с помощью паза 225 и элемента 226 для разъединения. Паз 225 образован в кожухе автоматизированной пипетки или в несущей части. Элемент для разъединения представляет собой часть узла выталкивателя и может содержать: штифт, подшипник, цилиндрический элемент. Кроме того, как видно из фигуры, узел 220 выталкивателя имеет конструкцию, которая допускает деформацию, а именно, рычаг с фиксирующим язычком 221 выполнен с возможностью деформирования (с левой стороны изображения) благодаря конструкции узла, в частности, пустоты между рычагом и корпусом узла. Этот вариант осуществления, а также другие ранее упомянутые варианты осуществления функционируют в соответствии со способом, поясненным ранее в настоящем раскрытии, а также представленным на ФИГ. 7.
[49] На ФИГ. 7 представлены этапы способа в соответствии с вариантами осуществления настоящего изобретения. Способ включает следующие этапы:
- На этапе 501 узел скольжения приводят в движение таким образом, что по меньшей мере часть узла скольжения перемещается по меньшей мере за часть узла выталкивателя,
- на этапе 502 узел скольжения отводят таким образом, что фиксирующий крючок узла скольжения прикрепляется к узлу выталкивателя.
- на этапе 503 узел скольжения и, посредством фиксирующего крючка, узел выталкивателя также отводят таким образом, что одноразовый наконечник, прикрепленный к узлу выталкивателя посредством цилиндра для наконечника, входит в контакт по меньшей мере с одной поверхностью разъединения или контакта,
- на этапе 504 узел скольжения также отводят таким образом, что перемещение одноразового наконечника задерживается поверхностью разъединения, и, в результате этого, происходит снятие наконечника с цилиндра для наконечника, и
- на этапе 505 узел скольжения отводят таким образом, что узел выталкивателя отсоединяется от узла скольжения с помощью механизма разъединения, содержащего по меньшей мере одно из: паза, поверхности, элемента,
- на этапе 506 узел выталкивателя возвращают в его исходное положение с использованием по меньшей мере одно из силы пружины, силы земного притяжения или магнитной силы.
[50] Дополнительные преимущества настоящего изобретения включают возможность точного измерения перемещения держателя при захвате (прикреплении) наконечника пипетки. Во время захвата сжатие пружины можно измерить с помощью датчика для отслеживания перемещения подвижного элемента выталкивателя, что позволяет вычислить силу, используемую для прикрепления наконечника пипетки, поскольку известно соотношение между вытеснением и силой. Указанный датчик может содержать по меньшей мере один из следующего: линейный датчик элемента на эффекте Холла, другой датчик на основе магнитной технологии, оптический датчик или механический переключатель для обнаружения начального движения. Кроме того, это позволяет контролировать наличие наконечника во время захвата наконечника, поскольку при отсутствии наконечника цилиндр не будет перемещаться таким же образом.
[51] Следует понимать, что раскрытые варианты осуществления настоящего изобретения не ограничиваются конкретными конструкциями, этапами способа или материалами, раскрытыми в данном документе, но также распространяются на их эквиваленты, которые могли бы предложить специалисты в данной области техники. Кроме того, следует понимать, что используемая в данном документе терминология использована исключительно с целью описания конкретных вариантов осуществления и не предназначена для ограничения.
[52] Ссылка в этом описании на один вариант осуществления, какой-либо вариант осуществления или изменение означает, что конкретный признак, конструкция или характеристика, описанные в связи с этим вариантом осуществления, включены по меньшей мере в один вариант осуществления настоящего изобретения. Таким образом, выражения «в одном варианте осуществления» или «в каком-либо варианте осуществления» в различных местах данного описания не означают, что все они обязательно относятся к одному и тому же варианту осуществления. При указании ссылки на числовое значение с использованием такого термина, как, например, «приблизительно» или «по существу», также раскрывается точное числовое значение.
[53] В контексте данного документа множество элементов, структурных элементов, композиционных элементов и/или материалов для удобства может быть представлено в общем списке. Однако эти списки следует истолковывать как списки, в которых каждый элемент списка может быть независимо идентифицирован как отдельный и уникальный элемент. Таким образом, ни один отдельный элемент такого списка не следует рассматривать как фактический эквивалент любого другого элемента того же списка исключительно на основании того, что они представлены в общей группе, если не указано иное. Кроме того, различные варианты осуществления и пример настоящего изобретения могут упоминаться в данном документе вместе с альтернативами для различных их компонентов. Следует понимать, что такие варианты осуществления, примеры и альтернативы не следует рассматривать как фактические эквиваленты друг друга, а следует рассматривать как отдельные и независимые формы для представления настоящего изобретения.
[54] Кроме того, описанные признаки, конструкции или характеристики могут быть объединены любым подходящим способом в одном или более вариантах осуществления. В этом описании представлены многочисленные конкретные детали, например, примеры значений длины, ширины, форм и т.д., для обеспечения полного понимания вариантов осуществления настоящего изобретения. Однако для специалиста в соответствующей области техники будет очевидно, что настоящее изобретение может быть осуществлено на практике без одной или более конкретных деталей или с применением других способов, компонентов, материалов и т.д. В других случаях общеизвестные конструкции, материалы или операции не показаны или подробно не описаны во избежание затруднения понимания аспектов настоящего изобретения.
[55]Хотя вышеприведенные примеры иллюстрируют принципы настоящего изобретения в одном или более конкретных вариантах применения, для специалистов в данной области техники будет очевидно, что могут быть предложены многочисленные изменения формы, использования и деталей реализации без применения изобретательности и без отступления от принципов и концепций настоящего изобретения. Соответственно, не предполагается, что настоящее изобретение ограничено, за исключением случаев, указанных в нижеизложенной формуле изобретения.
[56] Глаголы «содержать» и «включать» использованы в этом документе как открытые ограничения, которые не исключают неперечисленные признаки и не требуют также их наличия. Признаки, перечисленные в зависимых пунктах формулы изобретения, можно свободно комбинировать, если явно не указано иное. Кроме того, следует понимать, что использование грамматических форм выражения единственного числа, во всем этом документе не исключает множественности.
ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ
[57] По меньшей мере некоторые варианты осуществления настоящего изобретения находят промышленное применение в системах для работы с жидкостью.
Изобретение относится к автоматизированным пипеткам, в частности к роботизированным пипеточным устройствам, которые могут представлять собой пипетки с вытеснением воздуха. Система пипетки, содержащая: корпус модуля, содержащий неподвижную контактную поверхность, и узел выталкивателя, содержащий держатель наконечника пипетки, двигатель, расположенный внутри корпуса модуля и выполненный с возможностью выдачи жидкости путем приведения в действие поршня в цилиндре и перемещения узла выталкивателя в первом направлении таким образом, что наконечник пипетки вступает в контакт с неподвижной контактной поверхностью и отсоединяется от держателя, при этом узел выталкивателя частично расположен внутри корпуса модуля, а двигатель выборочно соединен с узлом выталкивателя с помощью узла скольжения, при этом узел скольжения и узел выталкивателя прикреплены друг к другу или отсоединены друг от друга в зависимости от положения узла скольжения. Технический результат – упрощение конструкции пипетки. 2 н. и 8 з.п. ф-лы, 7 ил.
1. Система пипетки, содержащая:
- корпус модуля, содержащий неподвижную контактную поверхность, и
- узел выталкивателя, содержащий держатель наконечника пипетки,
- двигатель, расположенный внутри корпуса модуля и выполненный с возможностью выдачи жидкости путем приведения в действие поршня в цилиндре и перемещения узла выталкивателя в первом направлении таким образом, что наконечник пипетки вступает в контакт с неподвижной контактной поверхностью и отсоединяется от держателя,
при этом узел выталкивателя частично расположен внутри корпуса модуля, а двигатель выборочно соединен с узлом выталкивателя с помощью узла скольжения, при этом узел скольжения и узел выталкивателя прикреплены друг к другу или отсоединены друг от друга в зависимости от положения узла скольжения.
2. Система по п. 1, в которой держатель наконечника выступает из неподвижной контактной поверхности.
3. Система по п. 1, в которой узел скольжения содержит фиксирующий крючок, узел выталкивателя содержит фиксирующий язычок, а двигатель выполнен с возможностью отсоединения наконечника пипетки путем:
первого приведения в движение узла скольжения во втором направлении таким образом, что фиксирующий крючок входит в зацепление с фиксирующим язычком узла выталкивателя, и
последующего приведения в движение узла скольжения в первом направлении таким образом, что узел выталкивателя приводится в движение в первом направлении относительно корпуса модуля.
4. Система по любому из предшествующих пунктов, в которой система также содержит направляющую, расположенную внутри корпуса модуля и имеющую наклонную поверхность, ориентированную в третьем направлении, причем указанная направляющая выполнена таким образом, что, когда узел выталкивателя вступает в контакт с указанной наклонной поверхностью во время движения, фиксирующий крючок отсоединяется от фиксирующего язычка.
5. Система по п. 1, в которой узел выталкивателя содержит непроводящий материал.
6. Система по п. 1, в которой система содержит систему для выборочного повышения жесткости, расположенную внутри корпуса модуля и содержащую механизм, выполненный с возможностью задерживания, и пружину.
7. Способ снятия наконечника пипетки, прикрепленного к держателю системы пипетки, которая содержит корпус модуля, содержащий неподвижную контактную поверхность, при этом способ включает использование двигателя, расположенного внутри корпуса модуля и выполненного с возможностью выдачи жидкости путем приведения в действие поршня в цилиндре, и также выполненного с возможностью:
приведения в движение узла выталкивателя, частично расположенного внутри корпуса модуля системы пипетки в первом направлении относительно корпуса модуля, таким образом, что наконечник вступает в контакт с неподвижной контактной поверхностью корпуса модуля и отсоединяется от держателя,
при этом двигатель выборочно соединен с узлом выталкивателя с помощью узла скольжения, при этом узел скольжения и узел выталкивателя прикреплены или отсоединены друг от друга в зависимости от положения узла скольжения.
8. Способ по п. 7, согласно которому узел скольжения содержит фиксирующий крючок, узел выталкивателя содержит фиксирующий язычок, а наконечник пипетки отсоединяют путем:
первого приведения в движение узла скольжения во втором направлении таким образом, что фиксирующий крючок входит в зацепление с фиксирующим язычком узла выталкивателя, и
последующего приведения в движение узла скольжения в первом направлении таким образом, что узел выталкивателя приводится в движение в первом направлении относительно корпуса модуля.
9. Способ по п. 7, согласно которому узел выталкивателя содержит непроводящий материал.
10. Способ по п. 7, согласно которому узел выталкивателя отсоединяют от двигателя путем его приведения в контакт с наклонной поверхностью.
| CN 106459866 A, 22.02.2017 | |||
| CN 108187772 A, 22.06.2018 | |||
| CN 111448461 A, 24.07.2020 | |||
| CN 1984717 A, 20.06.2007 | |||
| ЭЛЕКТРОННАЯ ПИПЕТКА С ДИСПЛЕЕМ И МАНИПУЛЯТОРОМ ДЛЯ УПРАВЛЕНИЯ ЗАБОРОМ И РАСПРЕДЕЛЕНИЕМ ЖИДКОСТИ | 2004 |
|
RU2340397C2 |
