Область техники, к которой относится изобретение
Настоящее изобретение относится к способу определения концентрации взвешенных частиц в потоке и к устройству для его осуществления.
Уровень техники
Известны различные способы и устройства определения концентрации взвешенных частиц в потоке.
В патентах РФ №2485481 (опубл. 20.06.2013), №2622494 (опубл. 15.06.2017) и №2626750 (опубл. 31.07.2017) описаны варианты способа анализа взвешенных частиц, реализуемого с помощью устройства, в котором через поток со взвешенными частицами пропускают многократно отраженный лазерный луч, отражения которого от взвешенных частиц регистрируются видеокамерой. Недостатком этих решений является чрезмерная сложность в реализации.
В патентах РФ №2767953 (опубл. 22.03.2022) и №2770567 (опубл. 18.04.2022) раскрыты аналогичные способ и устройство анализа взвешенных частиц, где облучение потока осуществляют лазерным лучом, разделенным на опорный и объектный пучки для формирования голографических изображений на матрице из приборов с зарядовой связью видеокамеры. Эти решения имеют еще большую сложность.
В качестве ближайшего аналога принят патент РФ на полезную модель №186970 (опубл. 12.02.2019), раскрывающий датчик для измерения концентрации пыли, в измерительной камере которого проба воздуха облучается лазерным лучом инфракрасного диапазона, а рассеянное от взвешенных частиц и прошедшее через пробу части излучения регистрируются оптическими приемниками. Соотношение ослабленного и отраженного излучений дает в вычислительное устройство информацию о дисперсном составе пыли в заданном диапазоне.
Недостатком этого технического решения является работа только в стационарном объеме, а также невозможность определения того, как взвешенные частицы в потоке распределены по размерам.
Раскрытие изобретения
Задачей настоящего изобретения является преодоление недостатков ближайшего аналога и расширение арсенала технических средств с достижением технического результата в виде расширения функциональных возможностей, заключающихся в определении концентрации взвешенных частиц в потоке и их распределения по размерам.
Для решения отмеченной задачи и достижения указанного технического результата в первом объекте настоящего изобретения предложен способ определения концентрации взвешенных частиц в потоке, в котором: облучают лучом лазерного источника протекающий по трубопроводу поток со взвешенными частицами в нем, причем поток и трубопровод прозрачны для упомянутого луча, падающего на трубопровод под заданным углом к направлению потока; размещают в стенке трубопровода в месте падения упомянутого луча первую линзу, сфокусированную в середину трубопровода в направлении распространения упомянутого луча; размещают в противоположной стенке трубопровода напротив точки фокуса первой линзы вторую линзу; располагают первый оптический приемник с противоположной от лазерного источника стороны на линии распространения упомянутого луча; располагают второй оптический приемник с противоположной от лазерного источника стороны в точке фокуса второй линзы; регистрируют вторым оптическим приемником сигнал от излучения, рассеянного каждой взвешенной частицей в упомянутом потоке, и одновременно регистрируют первым оптическим приемником сигнал от излучения, прошедшего через поток; вычисляют по одновременно измеренным сигналам от обоих оптических приемников размер каждой взвешенной частицы; - определяют концентрацию взвешенных частиц в потоке путем деления количества взвешенных частиц, зарегистрированных за заданный период времени, на объем потока, прошедшего за тот же период времени через расходомер.
Особенность способа по первому объекту настоящего изобретения состоит в том, что падение луча лазерного источника на трубопровод под заданным углом к направлению потока могут обеспечивать посредством зеркала.
Для решения той же задачи и достижения того же технического результата во втором объекте настоящего изобретения предложено устройство для определения концентрации взвешенных частиц в потоке, содержащее: трубопровод, предназначенный для пропускания потока со взвешенными частицами; лазерный источник, выполненный для облучения трубопровода лучом под заданным углом к направлению потока, причем трубопровод и поток прозрачны для этого луча; первую линзу, размещенную в стенке трубопровода в месте падения упомянутого луча и сфокусированную в середину трубопровода в направлении распространения упомянутого луча; вторую линзу, размещенную в противоположной стенке трубопровода напротив точки фокуса первой линзы; первый оптический приемник, расположенный с противоположной от лазерного источника стороны на линии распространения упомянутого луча; второй оптический приемник, расположенный с противоположной от лазерного источника стороны в точке фокуса второй линзы; расходомер, предназначенный для определения объема потока, прошедшего по трубопроводу за заданный период времени; вычислительное средство, соединенное с обоими оптическими приемниками и расходомером и выполненное с возможностью: регистрации принятого вторым оптическим приемником сигнала от излучения, рассеянного каждой взвешенной частицей в упомянутом потоке, и одновременно регистрации принятого первым оптическим приемником сигнала от излучения, прошедшего через поток; вычисления размера каждой взвешенной частицы по одновременно измеренным сигналам от обоих оптических приемников; определения концентрации взвешенных частиц в потоке путем деления количества взвешенных частиц, зарегистрированных за заданный период времени, на объем потока, прошедшего за тот же период времени через расходомер.
Особенность устройства по второму объекту настоящего изобретения состоит в том, что на пути луча лазерного источника может быть установлено зеркало, отклоняющее этот луч под заданным углом к направлению потока.
Краткое описание чертежей
Настоящее изобретение иллюстрируется приложенными чертежами, на которых одинаковые элементы обозначены одними и теми же ссылочными позициями.
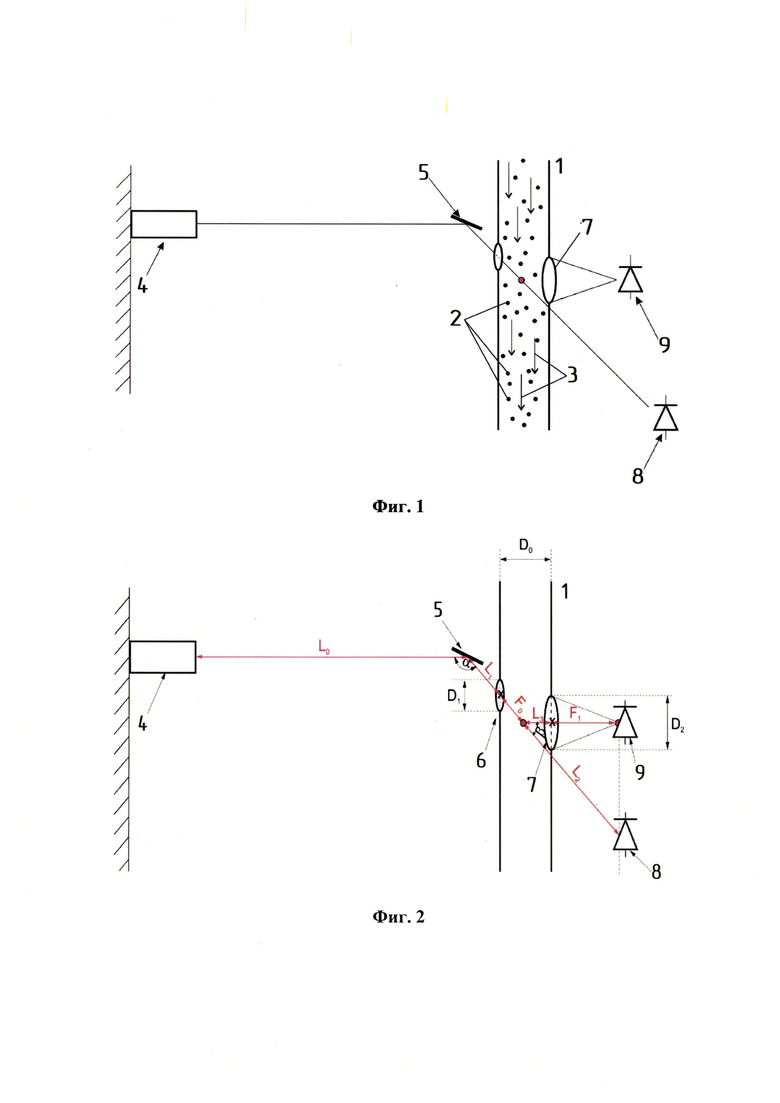
На Фиг. 1 показана схема устройства по второму объекту настоящего изобретения.
На Фиг. 2 проиллюстрирован ход лучей в схеме по Фиг. 1.
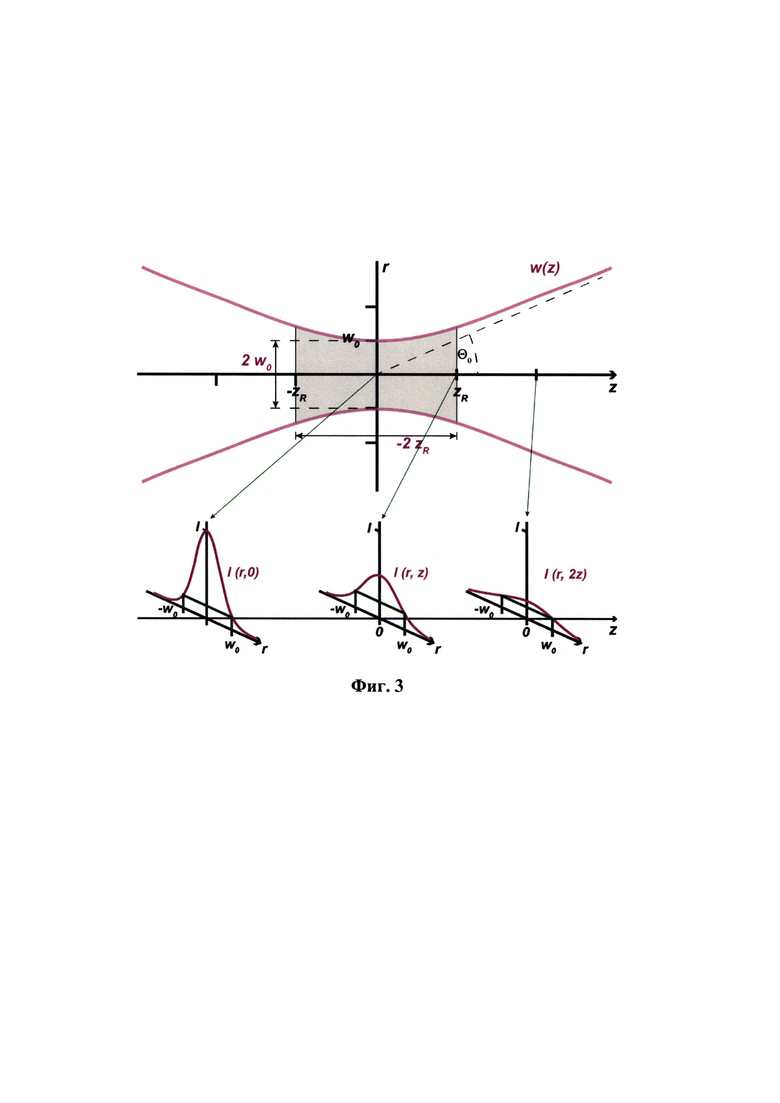
На Фиг. 3 представлены графики распределения интенсивности луча при прохождении через линзу.
На Фиг. 4 показано распределение рассеянного света в зависимости от отношения размера взвешенных частиц к длине волны.
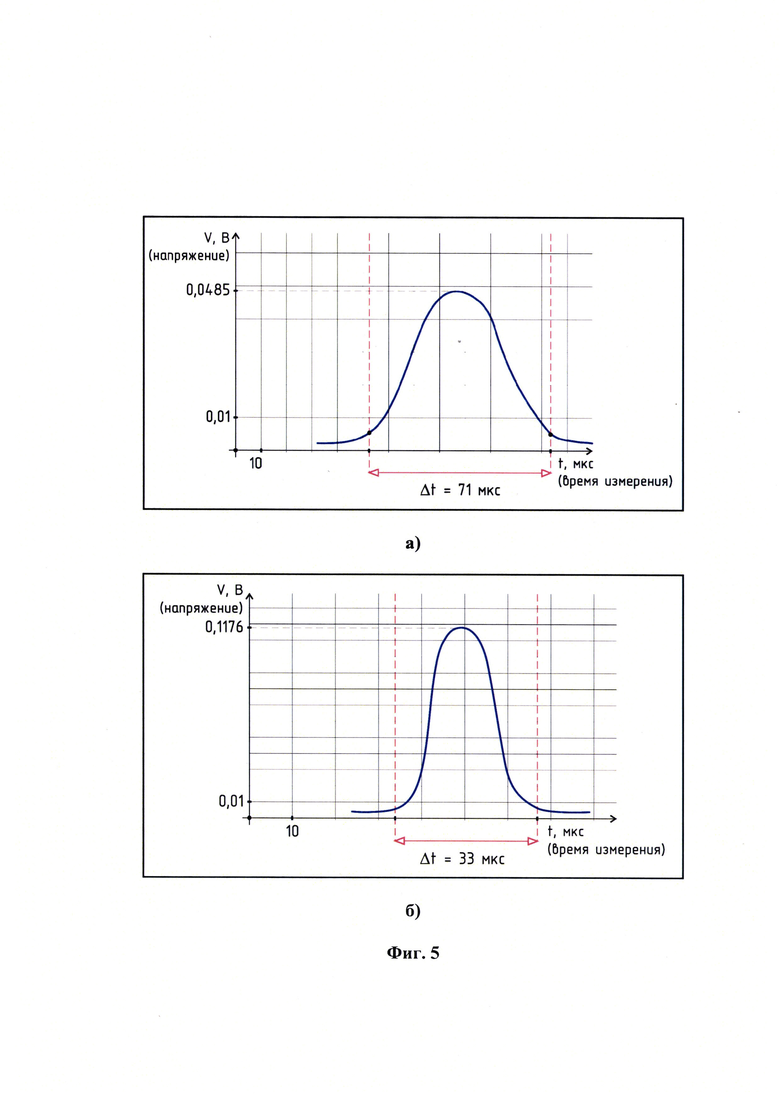
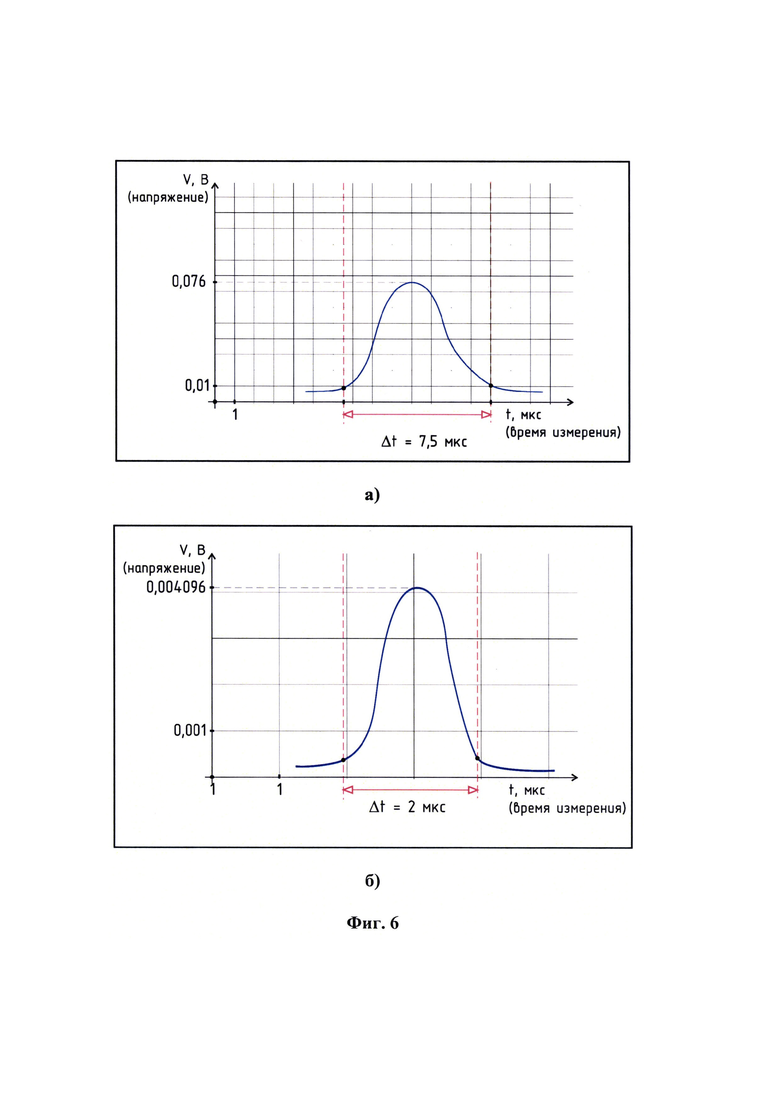
На Фиг. 5 и 6 приведены формы аналогового сигнала со второго оптического приемника для взвешенных частиц разных размеров.
Подробное описание вариантов осуществления
Устройство по второму объекту настоящего изобретения содержит (Фиг. 1) трубопровод 1, предназначенный для пропускания потока со взвешенными частицами, которые обозначены ссылочной позицией 2. Стрелками 3 показано направление потока.
Устройство далее содержит лазерный источник 4, выполненный для облучения трубопровода 2 лучом под заданным углом к направлению 3 потока. Специально отметим, что трубопровод 2 и поток в нем прозрачны для этого луча, т.е. лазерный источник 4 выбран специально для просвечивания этого потока. К примеру, это может быть источник оптического излучения, выбор длины волны которого объясняется далее. Лазерный источник 4 может быть установлен под упомянутым выше заданным углом к направлению 3 потока, либо можно использовать зеркало 5 для поворота луча лазерного источника 4. Заданный угол в предпочтительном варианте осуществления близок к 45°, хотя может иметь и иное значение, например, 30° или 60° (не равное 90°).
В том месте стенки трубопровода, на которое направлен луч лазерного источника 4, размещена первая линза 6, сфокусированная в середину трубопровода 1 в направлении распространения упомянутого луча. В противоположной стенке трубопровода напротив точки фокуса первой линзы 6 размещена вторая линза 7.
Устройство содержит первый оптический приемник 8, расположенный с противоположной от лазерного источника 4 стороны на линии распространения его луча, и второй оптический приемник 9, расположенный с противоположной от лазерного источника 4 стороны в точке фокуса второй линзы 7.
Устройство далее содержит расходомер (не показано), предназначенный для определения объема потока, прошедшего по трубопроводу 1 за заданный период времени, и вычислительное средство (не показано), соединенное с обоими оптическими приемниками 8 и 9 и с расходомером. Это вычислительное средство может быть, например, компьютером, процессором с памятью, контроллером и т.п. Вычислительное средство выполнено (запрограммировано) с возможностью осуществлять следующие операции:
- регистрация принятого вторым оптическим приемником 9 сигнала от излучения, рассеянного каждой взвешенной частицей 2 в потоке, с одновременной регистрацией принятого первым оптическим приемником 8 сигнала от излучения, прошедшего через поток;
- вычисление размера каждой взвешенной частицы 2 по одновременно измеренным сигналам от обоих оптических приемников 8 и 9;
- определение концентрации взвешенных частиц 2 в потоке путем деления количества взвешенных частиц, зарегистрированных за заданный период времени, на объем потока, прошедшего за тот же период времени через расходомер.
Фиг. 2 поясняет ход лучей в устройстве по второму объекту настоящего изобретения и выбор соответствующих размеров. В частном случае эти размеры могут составлять, к примеру:
D0=7 мм - диаметр трубопровода 1;
L0=30 мм - расстояние от лазерного источника 4 до зеркала 2;
L1=10 мм - расстояние от зеркала 3 до первой линзы 6;
F0=4,95 мм - фокусное расстояние первой линзы 6;
L3=3,57 мм - расстояние от точки фокуса первой линзы 6 до центра оптической оси второй линзы 7;
F1=8 мм - расстояние между фокусом второй линзы 7 и вторым оптическим приемником 9;
L2=16,26 мм - расстояние от точки фокуса первой линзы 6 до первого оптического приемника 8.
Графики распределения интенсивности I луча лазерного источника 4 при прохождении через первую линзу 6 представлены на Фиг. 3. На этом чертеже обозначено:
2w0 - минимальный диаметр луча в фокусе первой линзы 6;
zR - расстояние, на котором интенсивность луча падает в два раза по сравнению с точкой фокуса;
r - расстояние от фокуса.
Теперь поясним выбор лазерного источника 4. Длина волны его излучения предпочтительно не должна превышать ~ 650 нм для уменьшения размера 2w0, но, в то же время, должна быть максимально близкой к максимуму спектральный чувствительности оптических приемников 8 и 9. Для такой длины волны указанные размеры составляют 2w0 ≈ 20 мкм и zR ≈ 100 мкм.
При прохождении частицы через фокус мы можем наблюдать физическое явление, проиллюстрированное на Фиг. 4, где показаны диаграммы рассеяния, т.е. распределение интенсивности I рассеянного света в зависимости от отношения размера взвешенной частицы к длине λ волны. Из Фиг. 4 видно, что распределение рассеянного света взвешенной частицей зависит от отношения характерного размера самой частицы к длине λ волны. Под характерным размером подразумевается диаметр частицы, так как в расчетах условно принято, что все частицы имеют сферическую форму.
В зоне прямого луча интенсивность рассеянного излучения слишком велика и не будет сильно отличаться от интенсивности падающего луча, когда ему ничего не препятствует, что приведет к проблемам считывания сигнала. Именно поэтому второй оптический приемник 9 установлен в зоне прямого рассеяния, т.е. предпочтительно на угол в 45° от направления луча лазерного источника 4.
Вычисление количественной концентрации взвешенных частиц 2 оптическим методом сводится к классической задаче электродинамики, решенной еще в 1908 году Густавом Ми, что очень хорошо работает с частицами, характерный размер которых не превышает 10 мкм. После 10 мкм количественная концентрация вычисляется частным случаем Рассеяния Ми - приближением Фраунгофера.
Пусть I0 - интенсивность падающего света, I - интенсивность рассеянного света в некоторой точке на большом расстоянии r от частицы и k - волновое число, определяемое соотношением k=2π/λ, где λ - длина волны в окружающей частицу среде. Так как I должно быть пропорционально I0 и r, можно записать: 
Здесь F (θ, ϕ) является безразмерной функцией направления и не зависит от r. Она зависит от ориентации частицы по отношению к падающей волне и от состояния поляризации падающей волны. Относительные значения можно нанести на полярную диаграмму в функции угла для фиксированной плоскости рассеяния, содержащей направление падающего светового пучка. Эта диаграмма называется диаграммой рассеяния данной частицы (Фиг. 4). Практически наиболее важный результат рассеяния света в дисперсных средах состоит в энергетическом ослаблении падающего потока за счет перераспределения (рассеяния) части этого потока по всем направлениям. Для количественной характеристики такого ослабления можно ввести понятия о коэффициентах поглощения, а также рассеяния (ослабления). Рассеянная во всех направлениях электромагнитная энергия суммарного потока к отношению интенсивности падающего потока называется коэффициентом σp рассеяния частицы.
Аналогичное отношение со знаком минус полного потока энергии (падающей и рассеянной) через большую сферу с центром, находящимся в центре частицы, к интенсивности падающего потока называется коэффициентом σп поглощения частицы. Если брать во внимание интенсивность потока и размерность потока энергии, то для размерности коэффициентов рассеяния частицей имеем площадь. Поэтому эти коэффициенты называются эффективными поперечниками рассеяния или поглощения. Измерения рассеяния и ослабления дают нам возможность определить (по крайней мере, в принципе) размер и распределение частиц по размерам, их форму и ориентацию.
Из теории Ми следует, что угловое распределение света, рассеянного частицами дисперсной среды, однозначно связано с радиусом R частицы. Интенсивность света, рассеянного одной частицей под разными углами к направлению падающего луча (индикатриса рассеяния света), определяется следующим соотношением:

где m - показатель преломления вещества частицы; z - расстояние от частицы до регистрирующего прибора, λ - длина волны, I0 и I - интенсивности падающего и рассеянного излучателей соответственно, γ - угол, под которым измеряется интенсивность рассеянного излучения относительно направления падающего излучения.
Из этого уравнения можно вычислить зависимость радиуса частицы с амплитудными значениями интенсивности света, которые будут возбуждать ток в оптическом приемнике:

Когда частица достигает размеров, где теория Ми не может достоверно подсчитать размер частицы (т.е. размер частицы превышает 10 мкм), используется частный случай теории Ми - приближение Фраунгофера.
Так как индикатриса рассеяния фокусируется на оптическом приемнике, то расчет размеров частицы сводится к решению интегрального уравнения Фредгольма первого рода:
где:  - параметр дифракции излучения на частицы; d - характерный размер частицы; λ - длина волны; I(θ) - интенсивность излучения, падающего на частицу; I0 - интенсивность рассеянного света; ƒ(р) - функция распределения частиц по размеру; k(р,θ) - ядро Фредгольма (ядро интегрального уравнения).
- параметр дифракции излучения на частицы; d - характерный размер частицы; λ - длина волны; I(θ) - интенсивность излучения, падающего на частицу; I0 - интенсивность рассеянного света; ƒ(р) - функция распределения частиц по размеру; k(р,θ) - ядро Фредгольма (ядро интегрального уравнения).
Эти соотношения лежат в основе программирования вычислительного средства в устройстве по настоящему изобретению.
Способ по первому объекту настоящего изобретения реализуется с помощью описанного устройства следующим образом.
Устанавливают лазерный источник 4 таким образом, чтобы его луч падал на трубопровод 1 под заданным углом. Возможно для этой цели использовать зеркало 5. В стенке трубопровода 1 в месте падения этого луча размещают первую линзу 6, сфокусированную в середину трубопровода 1 в направлении распространения упомянутого луча, а в противоположной стенке трубопровода 1 напротив точки фокуса первой линзы 6 размещают вторую линзу 7. Располагают первый оптический приемник 8 с противоположной от лазерного источника 4 стороны на линии распространения его луча, второй оптический приемник 9 располагают с противоположной от лазерного источника 4 стороны в точке фокуса второй линзы 7.
Облучают лучом лазерного источника 4 протекающий по трубопроводу 1 поток со взвешенными частицами 2, причем поток и трубопровод 1 прозрачны для луча лазерного источника 4.
Регистрируют вторым оптическим приемником 9 сигнал от излучения, рассеянного каждой взвешенной частицей 2 в потоке, и одновременно регистрируют первым оптическим приемником 8 сигнал от излучения, прошедшего через поток. Измеренные значения фиксируют в памяти вычислительного средства.
По одновременно измеренным сигналам от обоих оптических приемников 8 и 9 с помощью вычислительного средства вычисляют размер каждой взвешенной частицы 2, попавшей в фокус первой линзы 6, а также определяют количество взвешенных частиц, проходящих через фокус первой линзы 6 за заданный период времени.
С помощью расходомера регистрируют объем потока, прошедшего за тот же период времени через расходомер. В вычислительном средстве определяют концентрацию взвешенных частиц в потоке путем деления количества взвешенных частиц, зарегистрированных за заданный период времени, на зарегистрированный объем потока.
Поскольку диаметр трубопровода достаточно мал, теми частицами, которые проходят мимо точки фокуса первой линзы 6, можно пренебречь. Как показали эксперименты, способ по первому объекту настоящего изобретения позволяет определять концентрацию взвешенных частиц с точностью не хуже ±10%.
Таким образом, настоящее изобретение расширяет арсенал технических средств и обеспечивает достижение технического результата в виде расширения функциональных возможностей, которые заключаются в определении концентрации взвешенных частиц в потоке и их распределения по размерам.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИЧЕСКИЙ РАСХОДОМЕР ДЛЯ ИЗМЕРЕНИЯ РАСХОДА ГАЗОВ И ЖИДКОСТЕЙ В ТРУБОПРОВОДАХ | 2004 |
|
RU2377573C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ МИНИАТЮРНЫЙ ОПТИЧЕСКИЙ ДАТЧИК ДЛЯ ДИСТАНЦИОННОГО ОБНАРУЖЕНИЯ МИКРО- И МАКРООБЪЕКТОВ И ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК ОБНАРУЖЕННЫХ ОБЪЕКТОВ | 2020 |
|
RU2736920C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КОНЦЕНТРАЦИИ ПЫЛИ В ГАЗОВОЙ СРЕДЕ | 2005 |
|
RU2284502C1 |
| Оптический способ контроля объемного содержания частиц в растворе | 1990 |
|
SU1728742A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАСПРЕДЕЛЕНИЯ РАЗМЕРОВ И КОНЦЕНТРАЦИЙ НАНОЧАСТИЦ В ЖИДКОСТЯХ И ГАЗАХ | 2008 |
|
RU2370752C1 |
| Устройство для определения размеров наночастиц в турбулентном воздушном потоке в зависимости от влияния изменений их общей концентрации | 2020 |
|
RU2796124C2 |
| Способ определения содержания нефти и механических частиц в подтоварной воде | 2021 |
|
RU2765458C1 |
| СПОСОБ ОПТИЧЕСКОЙ РЕГИСТРАЦИИ СИГНАЛОВ ФЛУОРЕСЦЕНЦИИ И РАССЕЯНИЯ АЭРОЗОЛЬНЫХ ЧАСТИЦ В ПОТОКЕ И ОПТИЧЕСКАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2448340C1 |
| Способ мониторинга атмосферных примесей | 1990 |
|
SU1800325A1 |
| Установка для селективного лазерного плавления металлического порошка | 2023 |
|
RU2824771C1 |

Изобретение относится к способу и устройству определения концентрации взвешенных частиц в потоке. Устройство для определения концентрации взвешенных частиц в потоке содержит трубопровод, предназначенный для пропускания потока со взвешенными частицами; лазерный источник, выполненный для облучения трубопровода лучом под заданным углом к направлению потока, причем трубопровод и поток прозрачны для этого луча; первую линзу, размещенную в стенке трубопровода в месте падения упомянутого луча и сфокусированную в середину трубопровода в направлении распространения упомянутого луча; вторую линзу, размещенную в противоположной стенке трубопровода напротив точки фокуса первой линзы; первый оптический приемник, расположенный с противоположной от лазерного источника стороны на линии распространения упомянутого луча; второй оптический приемник, расположенный с противоположной от лазерного источника стороны в точке фокуса второй линзы; расходомер, предназначенный для определения объема потока, прошедшего по трубопроводу за заданный период времени; вычислительное средство, соединенное с обоими оптическими приемниками и расходомером и выполненное с возможностью регистрации принятого вторым оптическим приемником сигнала от излучения, рассеянного каждой взвешенной частицей в упомянутом потоке, и одновременно регистрации принятого первым оптическим приемником сигнала от излучения, прошедшего через поток; а также вычисления размера каждой взвешенной частицы по одновременно измеренным сигналам от обоих оптических приемников и определения концентрации взвешенных частиц в потоке путем деления количества взвешенных частиц, зарегистрированных за заданный период времени, на объем потока, прошедшего за тот же период времени через расходомер. Техническим результатом является расширение арсенала технических средств. 2 н. и 2 з.п. ф-лы, 6 ил.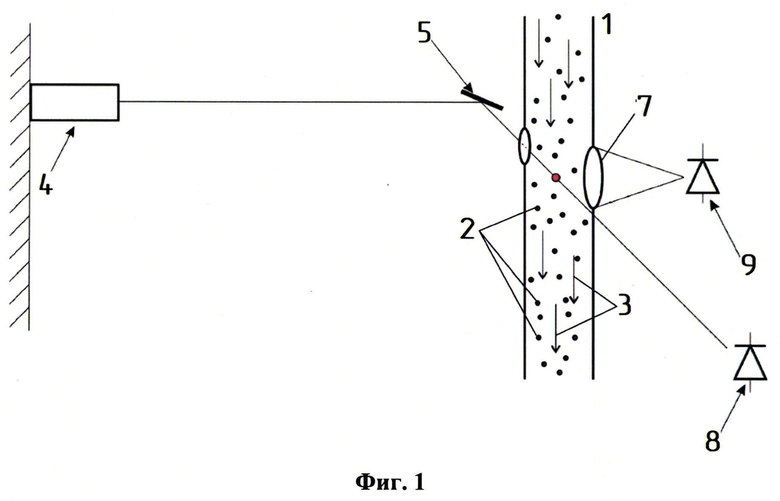
1. Способ определения концентрации взвешенных частиц в потоке, в котором:
- облучают лучом лазерного источника протекающий по трубопроводу поток со взвешенными частицами в нем, причем поток и трубопровод прозрачны для упомянутого луча, падающего на трубопровод под заданным углом к направлению потока;
- размещают в стенке трубопровода в месте падения упомянутого луча первую линзу, сфокусированную в середину трубопровода в направлении распространения упомянутого луча;
- размещают в противоположной стенке трубопровода напротив точки фокуса первой линзы вторую линзу;
- располагают первый оптический приемник с противоположной от лазерного источника стороны на линии распространения упомянутого луча;
- располагают второй оптический приемник с противоположной от лазерного источника стороны в точке фокуса второй линзы;
- регистрируют вторым оптическим приемником сигнал от излучения, рассеянного каждой взвешенной частицей в упомянутом потоке, и одновременно регистрируют первым оптическим приемником сигнал от излучения, прошедшего через поток;
- вычисляют по одновременно измеренным сигналам от обоих оптических приемников размер каждой взвешенной частицы;
- определяют концентрацию взвешенных частиц в потоке путем деления количества взвешенных частиц, зарегистрированных за заданный период времени, на объем потока, прошедшего за тот же период времени через расходомер.
2. Способ по п. 1, в котором падение луча лазерного источника на трубопровод под заданным углом к направлению потока обеспечивают посредством зеркала.
3. Устройство для определения концентрации взвешенных частиц в потоке, содержащее:
- трубопровод, предназначенный для пропускания потока со взвешенными частицами;
- лазерный источник, выполненный для облучения трубопровода лучом под заданным углом к направлению потока, причем трубопровод и поток прозрачны для этого луча;
- первую линзу, размещенную в стенке трубопровода в месте падения упомянутого луча и сфокусированную в середину трубопровода в направлении распространения упомянутого луча;
- вторую линзу, размещенную в противоположной стенке трубопровода напротив точки фокуса первой линзы;
- первый оптический приемник, расположенный с противоположной от лазерного источника стороны на линии распространения упомянутого луча;
- второй оптический приемник, расположенный с противоположной от лазерного источника стороны в точке фокуса второй линзы;
- расходомер, предназначенный для определения объема потока, прошедшего по трубопроводу за заданный период времени;
- вычислительное средство, соединенное с обоими оптическими приемниками и расходомером и выполненное с возможностью:
- регистрации принятого вторым оптическим приемником сигнала от излучения, рассеянного каждой взвешенной частицей в упомянутом потоке, и одновременно регистрации принятого первым оптическим приемником сигнала от излучения, прошедшего через поток;
- вычисления размера каждой взвешенной частицы по одновременно измеренным сигналам от обоих оптических приемников;
- определения концентрации взвешенных частиц в потоке путем деления количества взвешенных частиц, зарегистрированных за заданный период времени, на объем потока, прошедшего за тот же период времени через расходомер.
4. Устройство по п. 3, в котором на пути луча лазерного источника установлено зеркало, отклоняющее этот луч под заданным углом к направлению потока.
| ВРАЩАЮЩИЙСЯ ВАКУУМ-ФИЛЬТР НЕПРЕРЫВНОГОДЕЙСТВИЯ | 0 |
|
SU186970A1 |
| СПОСОБ ГОЛОГРАФИЧЕСКОГО АНАЛИЗА ВЗВЕШЕННЫХ ЧАСТИЦ | 2021 |
|
RU2770567C1 |
| УСТРОЙСТВО АНАЛИЗА ВЗВЕШЕННЫХ ЧАСТИЦ | 2021 |
|
RU2767953C1 |
| НОСИТЕЛЬ ДАННЫХ ДЛЯ ХРАНЕНИЯ ПОТОКА ИНТЕРАКТИВНЫХ ГРАФИЧЕСКИХ ДАННЫХ, АКТИВИЗИРУЕМЫЙ В ОТВЕТ НА ПОЛЬЗОВАТЕЛЬСКУЮ КОМАНДУ, И УСТРОЙСТВО ДЛЯ ЕГО ВОСПРОИЗВЕДЕНИЯ | 2006 |
|
RU2352982C2 |

