Область техники
Воплощение настоящего изобретения в основном относится к системам и устройствам для выработки возобновляемой энергии. В частности, настоящая разработка относится к ветротурбинной системе на основе аэродинамического сопротивления с регулируемыми лопастями.
Уровень техники
Предмет, рассматриваемый в разделе о предпосылках не следует рассматривать как предшествующий уровень техники только потому, что он упоминается в разделе о предпосылках. Аналогичным образом, не следует предполагать, что проблема, упоминаемая в разделе о предпосылках или связанная с предметом раздела о предпосылках, была ранее признана на предшествующем уровне развития техники. Предмет раздела о предпосылках просто представляет различные подходы, которые сами по себе также могут относиться к реализации заявленной технологии.
Возобновляемые источники энергии, часто называемой чистой энергией, все увереннее становятся одним из основных источников энергии в мире. В условиях истощения невосполнимых ресурсов, усиления загрязнения окружающей среды и постоянно растущих потребностей в электроэнергии мир обратил внимание на возобновляемые источники энергии, чтобы удовлетворить спрос на энергию без ущерба для окружающей среды. Два наиболее популярных источника возобновляемой энергии -солнечная энергия и энергия ветра. Ветряные турбины и ветряные мельницы существуют уже много веков и представляют собой самый дешевый источник энергии во многих частях мира.
И базовая конфигурация платформы ветряных мельниц с трехлопастной горизонтально-осевой ветряной турбиной с подветренной стороны на монопольной башне не очень изменилась. Однако размеры ветряной мельницы увеличились в 6-7 раз для высоты ступицы, в 6-8 раз для диаметра ротора и в 30-50 раз по номинальной мощности. Размеры ветряных турбин сегодня соперничают с внушительными памятниками и зданиями, выдерживая динамические и сложные нагрузки на протяжении всего срока службы турбины. Большинство ветряных турбин состоят из турбины с тремя лопастями, установленных на башне из трубчатой стали. Существуют менее распространенные разновидности с двумя лопастями или с бетонными или стальными решетчатыми башнями. На высоте 100 футов (30, 48 м) или более над землей башня позволяет турбине пользоваться преимуществами более высоких скоростей ветра на больших высотах.
Турбины улавливают энергию ветра своими лопастями, похожими на пропеллеры, которые действуют очень похоже на крыло самолета, площадь контакта с ветром составляет небольшую долю от общей площади, охватываемой лопастями по кругу. Когда дует ветер, на одной стороне лопасти образуется зона воздуха низкого давления. Затем зона воздуха низкого давления притягивает лопасть к себе, заставляя ротор поворачиваться под прямым углом к направлению ветра, это называется подъемной силой. Подъемная силы всегда меньше, чем общая сила ветра, приложенная к передней стороне лопасти, стремящаяся толкнуть лопасть в направлении ветра, то, что называется тягой, составляет около 300% или более. Частичное преобразование тяги в подъемную силу заставляет ротор вращаться подобно пропеллеру. Ряд зубчатых колес увеличивает скорость вращения ротора примерно с 18 оборотов в минуту до примерно 1500 или 1800 оборотов в минуту - скорость, которая позволяет генератору турбины вырабатывать электроэнергию переменного тока в соответствии с местной сетью.
В обтекаемом корпусе размещены ключевые компоненты турбины, обычно включающие трансмиссию, ротор и генератор, которые находятся внутри корпуса, называемого гондолой. Расположенные на вершине турбинной башни, некоторые гондолы достаточно велики для того, чтобы на них мог приземлиться вертолет. Другим установленным ключевым компонентом является контроллер турбины, который регулирует скорость вращения ротора при ветре, превышающем 55 миль (88 км) в час, чтобы избежать повреждения при сильном ветре. Анемометр постоянно измеряет скорость ветра и передает данные на контроллер турбины. Тормоз, также размещенный в гондоле, в аварийных ситуациях механически, электрически или гидравлически останавливает ротор.
Угол между направлением встречного ветра и углом наклона лопасти по отношению к встречному ветру называется "углом атаки". По мере увеличения этого угла атаки создается большая подъемная сила, но по мере того, как угол становится еще больше, больше примерно 20 градусов, подъемная сила лопасти начнет уменьшаться. Таким образом, существует идеальный угол наклона лопасти ротора, который создает оптимальный крутящий момент.
Ясно, что эта конструкция лопастей ветряной турбины, похожая на пропеллер, преобразует только подъемную энергию ветра в полезную мощность вала, называемую крутящим моментом. Это достигается за счет извлечения энергии из ветра путем его замедления или снижения скорости ветра, когда он скользит по лопастям.
Следовательно, существует потребность в ветротурбинной системе на основе аэродинамического сопротивления, имеющей регулируемые лопасти, которые обеспечивают большую площадь контакта лопастей и функционируют даже при низких скоростях ветра, а также при высоких скоростях ветра, превышающих 200 км/ч, с улучшенной эффективностью, экономичностью и простотой в обслуживании конструкции.
Цель изобретения
Целью изобретения является создание ветротурбинной системы на основе аэродинамического сопротивления и подъемной силы, имеющей регулируемые лопасти, в которых силы аэродинамического сопротивления и подъемной силы суммируются путем вращения лопасти вместе с ветром, а не под прямым углом, для повышения эффективности.
Другой целью изобретения является использование силы сопротивления в качестве основного движителя и добавление подъемной силы путем динамического изменения угла атаки лопасти в ответ на ее положение вращения в течение каждого поворота.
Еще одной целью настоящего изобретения является создание узла лопастей, который содержит панели подлопастей, вращающиеся вокруг своей оси и увеличивающие рабочий диапазон скорости ветра с менее чем 5 М/с до более чем 80 М/с.
Еще одна цель настоящего изобретения состоит в том, чтобы сделать ветряную турбину более дешевой и простой в обслуживании.
Раскрытие сущности изобретения
В соответствии с первым аспектом настоящего изобретения предусмотрена ветротурбинная система на основе аэродинамического сопротивления с регулируемыми лопастями. Система содержит один или несколько выходных приводных роторов, расположенных на основании, причем каждый выходной ротор соединен с одним или несколькими рычагами через одно или несколько первичных устройств управления; и один или несколько узлов лопастных панелей, соединенных с возможностью вращения с одним или несколькими соответствующими рычагами. Каждый узел панелей лопастей содержит вспомогательный поворотный вал, проходящий с возможностью вращения от каждого из одного или более рычагов; и монтажное устройство, соединенное со вспомогательным поворотным валом через одно или более основных устройств управления, причем каждое монтажное устройство имеет одну или более панелей подлопастей, поворачиваемых в одной или более точках поворота монтажного устройства, устройство, использующее одно или несколько вторичных устройств управления для обеспечения возможности вращения одной или нескольких панелей подлопастей, тем самым блокируя ветер и/или позволяя ветру частично или полностью проходить через панели лопастей. Система дополнительно включает в себя один или несколько датчиков для сбора контрольной информации, соединенных с одним или несколькими вспомогательными вращающимися валами, монтажным устройством, одной или несколькими вспомогательными лопастными панелями и одним или несколькими выходными приводными роторами; главный блок управления (ГБУ) может иметь модуль обработки, соединенный с одним или более датчиков, одно или более первичных устройств управления и одно или более вторичных устройств управления; и выходное устройство, выполненное с возможностью преобразования вращательного момента одного или более выходных приводных роторов в одну или более форм энергии.
В соответствии с вариантом воплощения настоящего изобретения ГБУ через модуль обработки сконфигурирован для динамического определения направления ветра, скорости ветра, скорости вращения одного или более выходных приводных роторов, индивидуального углового положения одного или более рычагов относительно точки максимальной тяги и усилия на каждом монтажном устройстве с помощью одного или нескольких датчиков; и динамической регулировки угла атаки каждого из монтажных устройств по отношению к соответствующему одному или нескольким рычагам во время каждого вращения путем вращения соответствующего вспомогательного поворотного вала с использованием основных управляющих устройств для оптимизации лобового сопротивления и/или подъемной силы усилим и уменьшения обратного сопротивление во время вращения соответствующей части каждого узла лопастей относительно ветра.
В соответствии с вариантом воплощения настоящего изобретения ГБУ через модуль обработки дополнительно сконфигурирован для регулировки открытия одной или более панелей подлопастей с использованием одного или более вспомогательных устройств управления для уменьшения обратного сопротивления, регулирования, а также сглаживания крутящего момента при порывистом ветре и защиты системы от скоростей, превышающих расчетные пределы, обеспечивая надежную и оптимальную производительность без перебоев при одновременном предотвращении любого повреждения системы.
В соответствии с вариантом воплощения настоящего изобретения один или более выходных приводных роторов могут быть расположены горизонтально, вертикально или под углом между ними на основании при последовательном или параллельном расположении.
В соответствии с вариантом воплощения настоящего изобретения один или более рычагов проходят радиально или тангенциально от каждого конца или участка между обоими концами каждого из одного или более выходных приводных роторов или их комбинации.
В соответствии с вариантом воплощения настоящего изобретения одна или более панелей с подлопастями выполнены с возможностью открывания вертикально или горизонтально или под углом внутри соответствующего монтажного устройства одного или более узлов лопастных панелей.
В соответствии с вариантом воплощения настоящего изобретения одна или несколько панелей подлопастей изготовлены из материала, выбранного из металла, неметалла, сплава, полимера, волокна, стекла, керамики, дерева или их комбинации.
В соответствии с вариантом воплощения настоящего изобретения одно или несколько первичных устройств управления и вторичных устройств управления выбираются из, не ограничиваясь этим, одного или нескольких устройств кулачкового привода, серводвигателей, ременно-шкивных устройств, механизма цепи и звездочки, механизмов зацепления, линейного и поворотного привода, рычажных механизмов, центрифуги, гидравлического, пневматического управление, числового управление, шаговых двигателей, электромагнитных двигателей, электромагнитов, винтовых приводов или их комбинации.
В соответствии с вариантом воплощения настоящего изобретения один или более датчиков включают, не ограничиваясь этим, датчик направления, датчик скорости, акселерометр, датчик гироскопа, магнитометр, датчик ориентации, считыватель пазов, считыватель выступов, оптический считыватель, датчик давления, датчик излучения, считыватель перфорированных дисков, магнитный датчик, датчики эффекта Холла, гравитационный переключатель, датчик наклона, кодер, датчик положения, тахометр, датчик движения или их комбинацию.
В соответствии со вторым аспектом настоящего изобретения предусмотрен узел панели лопастей для ветротурбинной системы. Монтажное устройство и узел панелей содержат вспомогательный поворотный вал или поворотные устройства, проходящие от каждого из одного или более рычагов монтажного устройства ветротурбинной системы, соединенного через одно или более первичных устройств управления. Каждое монтажное устройство содержит одну или несколько панелей подлопастей, которые могут поворачиваться в одной или нескольких точках поворота на монтажном устройстве с использованием одного или нескольких дополнительных устройств управления, позволяющих одной или нескольким панелям подлопастей вращаться по отдельности или вместе, тем самым блокируя ветер и/или позволяя ветру проходить через панели лопастей частично или полностью.
Краткое описание чертежей
Чтобы можно было подробно понять приведенные выше признаки настоящего изобретения, описание изобретения, кратко изложенное выше, можно получить со ссылкой на варианты воплощения, некоторые из которых проиллюстрированы на прилагаемых чертежах. Однако, следует отметить, что прилагаемые чертежи иллюстрируют только типичные варианты воплощения этого изобретения и, следовательно, не должны рассматриваться как ограничивающие его область применения, изобретение может допускать другие не менее эффективные варианты воплощения.
Эти и другие свойства, достоинства и преимущества настоящего изобретения станут очевидными при ссылке на следующие фигуры в тексте, с аналогичными справочными номерами, относящимися к аналогичным структурам на всех видах, где:
Фиг. 1А иллюстрирует изометрический вид ветротурбинной системы на основе аэродинамического сопротивления в расположении по вертикальной оси в соответствии с вариантом воплощения настоящего изобретения;
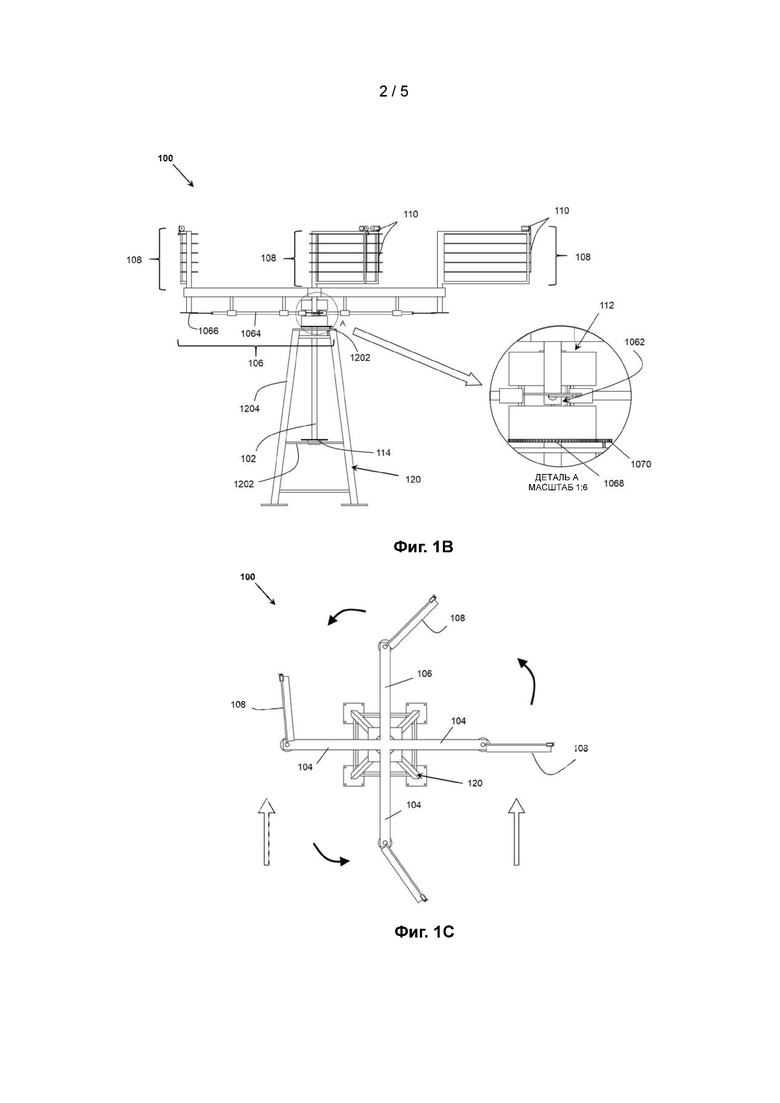
Фиг. 1В-1С иллюстрируют вид спереди и вид сверху ветротурбинной системы на основе аэродинамического сопротивления на фиг. 1А, соответственно, в соответствии с вариантом воплощения настоящего изобретения;
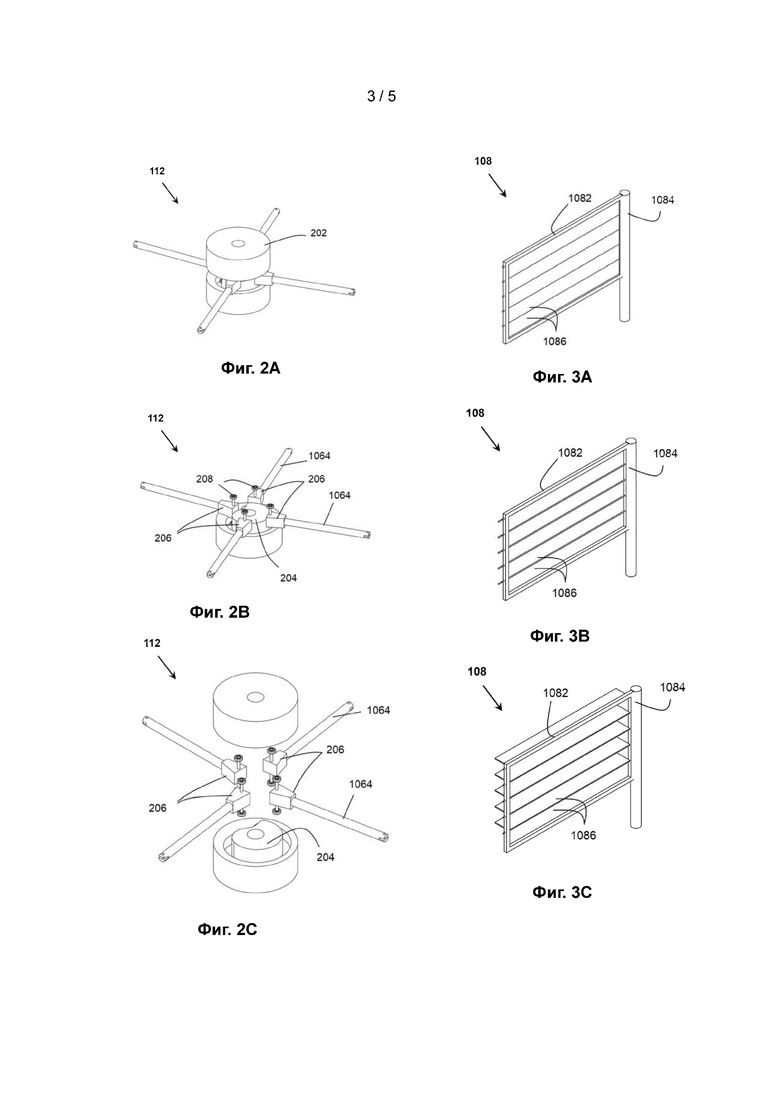
Фиг. 2А-2С иллюстрируют расположение кулачкового механизма в виде считывателя пазов, действующего в качестве главного блока управления (ГБУ) в системе, в соответствии с вариантом воплощения настоящего изобретения;
Фиг. 3А-3С иллюстрируют узел панели лопастей с (а) закрытыми, (b) частично открытыми/закрытыми и (с) открытыми панелями подлопастей в соответствии с вариантом воплощения настоящего изобретения;
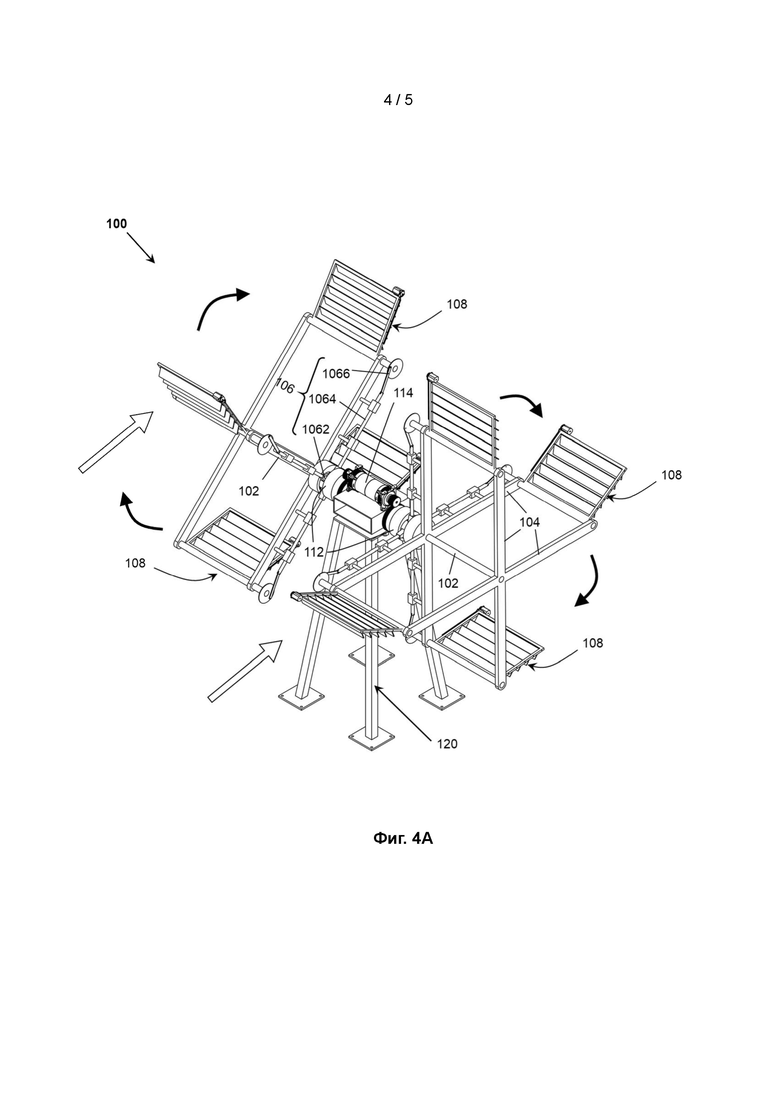
Фиг. 4А иллюстрирует изометрический вид ветротурбинной системы на основе аэродинамического сопротивления и подъемной силы в расположении по горизонтальной оси в соответствии с вариантом воплощения настоящего изобретения; и
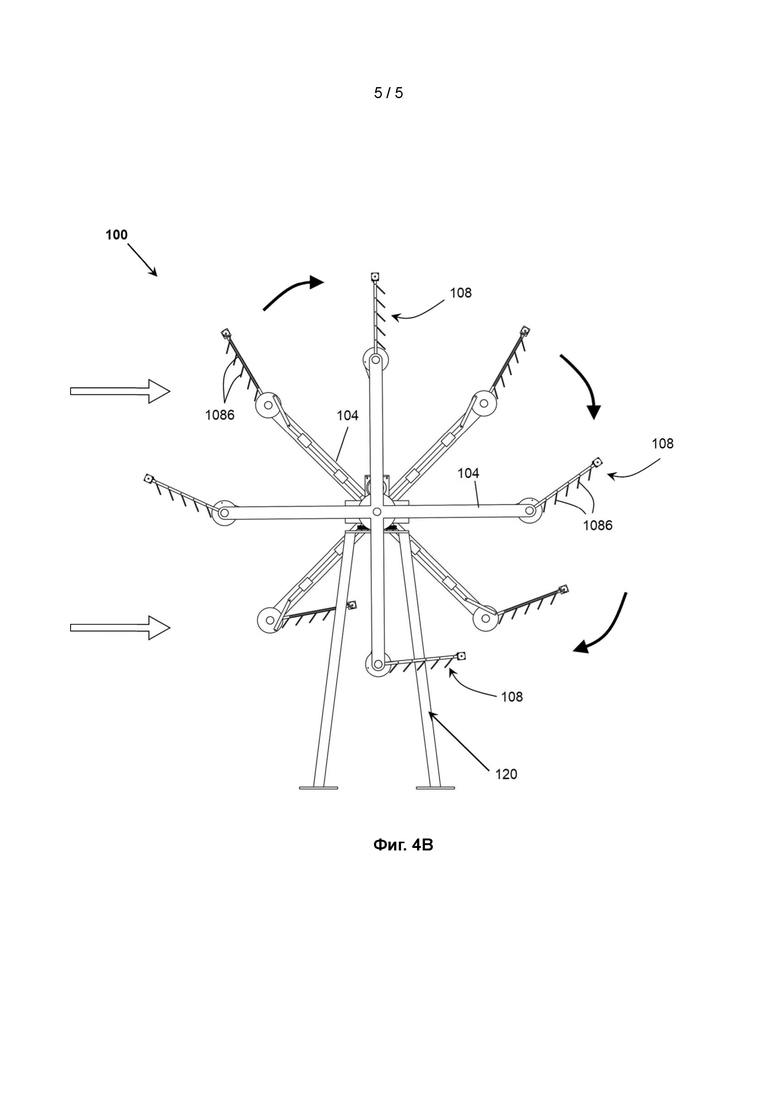
Фиг. 4В иллюстрирует вид сбоку ветротурбинной системы на основе аэродинамического сопротивления, показанной на фиг. 4А, в соответствии с вариантом воплощения настоящего изобретения.
Осуществление изобретения
Хотя настоящее изобретение описано здесь в качестве примера с использованием вариантов воплощения и иллюстративных чертежей, специалисты в данной области признают, что изобретение не ограничивается описанными вариантами выполнения чертежа или чертежей и не предназначено для представления спектра различных компонентов. Кроме того, некоторые компоненты, которые могут составлять часть изобретения, могут не быть проиллюстрированы на некоторых фигурах для простоты иллюстрации, и такие пропуски никоим образом не ограничивают описанные варианты воплощения. Следует понимать, что чертежи и подробное описание к ним не предназначены для ограничения изобретения конкретной раскрытой формой, а наоборот, изобретение должно охватывать все модификации, эквиваленты и альтернативы, входящие в объем настоящего изобретения, как определено в прилагаемых заявках. Во всем этом описании слово "может" используется в разрешительном смысле (т.е. означает, что оно потенциально может), а не в обязательном смысле (т.е. в значении "должен"). Кроме того, слово "один" означает "по меньшей мере один", а слово "множество" означает "один или более", если не указано иное. Кроме того, терминология и фразеология, используемые здесь, используются исключительно в описательных целях и не должны толковаться как ограничивающие сферу применения. Формулировки, такие как "включая", "включающие", "имеющие", "содержащие" или "привлекающие" и их варианты, предназначены для того, чтобы быть широкими и охватывать предмет, указанный далее, эквиваленты и дополнительные предметы, которые не указаны, и не предназначены для исключения их и других дополнений, компонентов, частей или шагов. Аналогичным образом, термин "содержащий" считается синонимом терминов "включающий" или "вмещающий" для применимых юридических целей. Любое рассмотрение документов, актов, материалов, устройств, изделий и т.п.включено в спецификацию исключительно с целью предоставления контекста для настоящего изобретения. Не предполагается и не представляется, что какие-либо или все эти вопросы составляют часть предыдущего уровня техники или являются повсеместными общими знаниями в области, относящейся к настоящему изобретению.
Настоящее изобретение описывается далее различными вариантами воплощения со ссылкой на прилагаемые чертежи, при этом справочные цифры, используемые на прилагаемом чертеже, соответствуют аналогичным элементам по всему описанию. Это изобретение, однако, может быть воплощено во многих различных формах и не должно толковаться как ограниченное изложенным здесь вариантом воплощения. Скорее, вариант воплощения представлен таким образом, чтобы это представление было тщательным и полным и полностью передавало объем изобретения специалистам в данной области. В следующем подробном описании приведены числовые значения и диапазоны для различных аспектов описанных вариантов реализации. Эти значения и диапазоны должны рассматриваться только в качестве примеров и не предназначены для ограничения объема заявок. Кроме того, ряд материалов определен как подходящий для различных аспектов реализации. Эти материалы должны рассматриваться как примерные и не предназначены для ограничения объема изобретения. Кроме того, терминология и фразеология, используемые здесь, используются исключительно в описательных целях и не должны толковаться как ограничивающие сферу применения.
Настоящее изобретение предлагает систему ветротурбины на основе аэродинамического сопротивления, которая имеет множество регулируемых узлов панелей лопастей, и каждый узел панелей лопастей сам по себе содержит множество управляемых (вращающихся) панелей подлопастей. Настоящее изобретение с его новым и изобретательным устройством способно независимо изменять угол падения каждого узла лопастной панели непрерывно во время каждого вращения, чтобы оптимизировать лобовое сопротивление или уменьшить обратное сопротивление и создать некоторую подъемную силу во время вращения детали. Устройство сконфигурировано таким образом, что ветер дует по касательной к вращению главного ротора, а не в осевом направлении. Главный ротор или роторы могут быть размещены вертикально, горизонтально или под любым углом между ними, каждый с одним или несколькими узлами лопастных панелей, закрепленных на соответствующих рычагах, соединенных с ротором в любом месте по длине ротора. Эти вспомогательные валы узлов лопастных панелей управляются главным блоком управления и устройствами управления (такими как кулачковое устройство, пускатели и т.д.) для регулировки угла падения лопастных панелей относительно направления ветра, непрерывно изменяющегося во время каждого цикла вращения.
Предусмотрены выходные устройства для использования энергии от вращения турбины и главного ротора(ов).
Кроме того, поскольку каждый узел панелей лопастей содержит подвижные или управляемые панели подлопастей, поэтому при нормальном ветре/рабочем состоянии панели подлопастей находятся в закрытом положении, чтобы блокировать воздух (обеспечивая максимальную площадь для удара ветра) и создавать максимальное лобовое сопротивление и подъемную силу. Однако, когда скорости ветра начинают превышать определенные заданные пределы, тогда панели подлопастей каждого узла панели лопастей могут быть независимо открыты (частично или полностью), чтобы позволить избыточному воздуху проходить через панель лопастей, частично или полностью. Это независимое управление панелями подлопастей помогает поддерживать постоянный крутящий момент даже при изменении скорости ветра более чем в 30 раз. Эта конструктивная особенность устраняет необходимость в тормозах для управления вращением при чрезмерных скоростях ветра. Этот способ позволяет передавать собранную вращательную силу для дальнейшего преобразования в любую другую форму энергии в соответствии с потребностями.
Настоящее изобретение теперь будет описано со ссылкой на чертежи, охватывающие различные варианты воплощения настоящего изобретения.
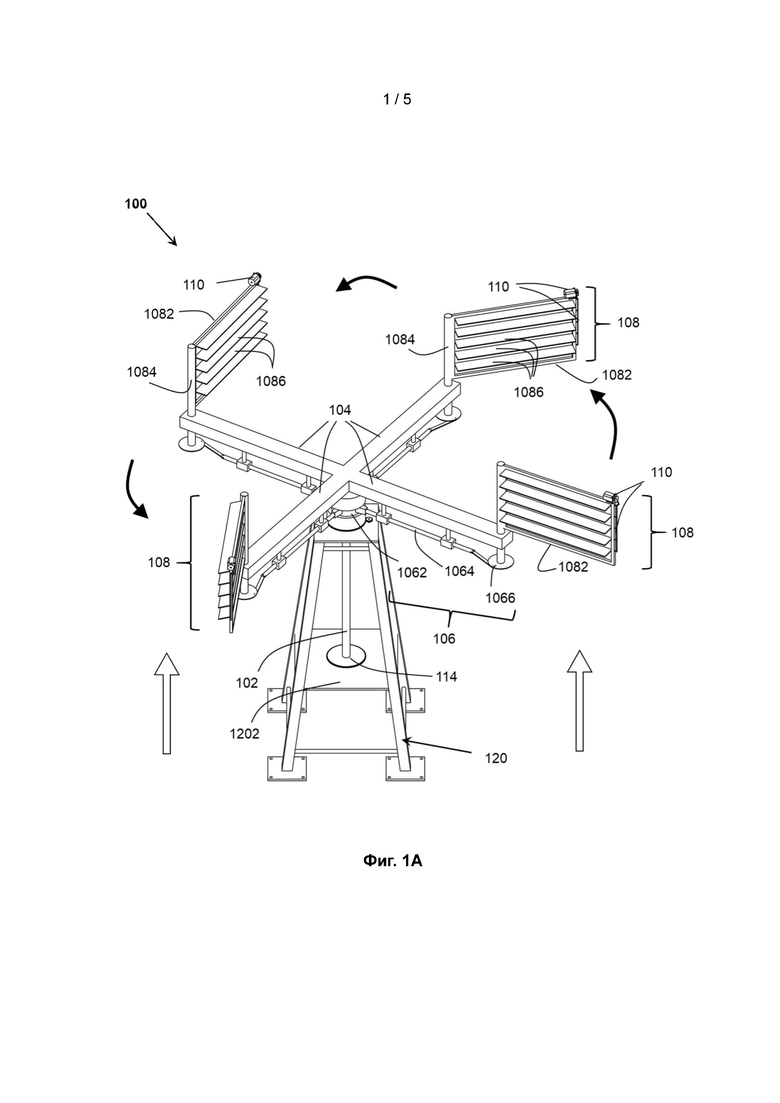
Фиг. 1А иллюстрирует изометрический вид ветротурбинной системы на основе аэродинамического сопротивления (100) в расположении по вертикальной оси в соответствии с вариантом воплощения настоящего изобретения; Как показано на фиг. 1А, ветротурбинная система (100), основанная на аэродинамическом сопротивлении (далее именуемая "система (100)"), расположена по вертикальной оси. Однако квалифицированному читателю будет понятно, что система (100) настоящего изобретения может быть расположена по вертикальной оси, горизонтальной оси или в любом промежуточном положении, не выходя за рамки настоящего изобретения. Устройства другого типа также рассматривались в других вариантах воплощения настоящего изобретения, которые объясняются далее в описании. Для лучшего объяснения и ясности в понимании, вид спереди и вид сверху системы (100) на фиг. 1А также показаны на фиг. 1В-1С, соответственно.
Как показано на фиг. 1А, система (100) содержит один или более выходных приводных роторов (102), расположенных на базовой конструкции (120). Базовая конструкция (120) может пониматься как конструкция, которая позволяет системе (100) достигать желаемой высоты, а также размещать компоненты системы (100). Высота может изменяться от 1 метра до нескольких сотен метров, в зависимости от типа применения. Таким образом, в этом смысле основание (120) может быть, не ограничиваясь этим, башней и т.д., имеющей одну или несколько опор (1204) и одну или несколько горизонтальных/вертикальных платформ (1202) для размещения компонентов системы (100) (как отмечено на фиг. 1А и 1В). Кроме того, может быть несколько базовых конструкций (120), если в одной системе (100) используется более одной ветряной турбины. Один или более выходных приводных роторов (102) могут быть расположены на базовой конструкции (120) вертикально или горизонтально или под любым углом между ними в последовательном или параллельном расположении, в зависимости от типа расположения (горизонтального, вертикального и т.д.), используемого для системы (100). Один или более выходных приводных роторов (102) действуют как ступица для всей вращающейся турбины и средства для сбора и передачи энергии, вырабатываемой системой (100), другим устройствам для передачи энергии, включая, но не ограничиваясь этим, электрические, механические, гидравлические, тепловые и т.д.
Чтобы упростить объяснение, в варианте воплощения, показанном на фиг. 1А-1С, показано, что только один выходной приводной ротор (102) расположен вертикально на основании. Кроме того, один или несколько выходных приводных роторов (102) соединены с одним или несколькими рычагами (104). Конструкция с одним или несколькими рычагами может проходить радиально или тангенциально от одного или обоих концов или участка между обоими концами каждого из одного или более выходных приводных роторов (102). Например, четыре рычага (104) проходят радиально (90 градусов друг от друга) от верхнего конца выходного приводного ротора (102), показанного на фиг.1А. Один или несколько рычагов (104) соединены с одним или несколькими выходными приводными роторами (102) с помощью первичных управляющих устройств (106). Предполагается, что термин "первичные управляющие устройства (106)" включает в себя механизмы нескольких типов и комбинации механизмов/устройств нескольких типов.
В этом смысле одно или несколько первичных управляющих устройств (106) и вторичных управляющих устройств (110) выбираются из, не ограничиваясь ими, одного или нескольких кулачковых и толкательных устройств, серводвигателей, ременно-шкивных устройств, цепных механизмов, линейного и поворотного привода (1066), зубчатой передачи, рычажных механизмов, центрифуги, гидравлического, пневматического управления, числового управления, шаговых двигателей, электромагнитных двигателей, электромагнитов, винтовых приводов, считывателей пазов, цифровых и аналоговых элементов управления или их комбинации. Например: вариант воплощения, показанный на фиг. 1А-1В, иллюстрирует использование кулачка и толкателя в виде механизма считывания пазов (1062), линейных приводов, управляющих стержней (1064), поворотного привода (1066), линейных подшипников, зубчатого зацепления и т.д. в качестве первичных управляющих устройств (106).
Кулачковый механизм (1062), используемый в варианте воплощения на фиг. 1А-1С, более подробно показан на фиг. 2А-2С. Фиг. 2А-2С иллюстрируют кулачковое устройство в виде считывателя пазов, действующего в качестве главного блока управления (ГБУ) (112) настоящего изобретения. На фиг. 2А показано, что кулачковый механизм (1062) расположен в ГБУ (112). На фиг. 2В и 2С показан один и тот же вид с открытым верхом и в разрезе соответственно. Как видно из фиг. 2А-2С, ГБУ (112) включает в себя корпус (202). Дополнительно, кулачок (204), имеющий канавку заданной ширины вокруг него, имеющий заданную форму, расположен в корпусе (202) и окружен четырьмя толкателями (206), соединенными с управляющими стержнями (1064) каждого линейного привода вдоль каждого из четырех рычагов (104). Толкатели (206) снабжены каждый двумя свободно вращающимися колесами/подшипниками (208) подходящего размера, чтобы входить в канавку кулачка, выполненную с возможностью перемещения по контуру кулачка (204). Форма канавки была предварительно запрограммирована для оптимизации угла атаки каждого узла панели лопастей во время одного полного поворота на 360° при заданном направлении ветра, например, северном. Когда этот полный узел паза поворачивается на 90° по часовой стрелке, его оптимальное направление ветра для всех лопастей изменится на 90° с текущего северного направления на восточное.
Вращение этого полного пазового узла в корпусе (202) достигается за счет зубчатого узла, содержащего меньшую приводную шестерню (1070), зацепленную с шестерней (1068) управления направлением, приводимой в движение двигателем (плохо виден) под управлением главного блока управления (ГБУ) (112), обеспечивающего то, что ветротурбинная система (100) оптимально активна при всех направлениях ветра. Ведущая шестерня (1070) помогает поворачивать шестерню (1068) управления направлением с прикрепленным к ней корпусом (202) в желаемой ориентации в зависимости от входных сигналов от датчика направления ветра. Дополнительно, также может быть предусмотрен один или более вспомогательных компонентов (208) (таких как подшипники, заклепки, небольшие колеса, стержни и т.д.) для закрепления компонентов на месте и обеспечения плавного относительного перемещения.
Следует отметить, что все компоненты и соединения первичных управляющих устройств (106), упомянутые выше или показанные на фиг. 1А-1С и фиг. 2А-2С, являются лишь примерными. Они иллюстрируют, что первичные управляющие устройства (106) могут быть чисто механическими и в то же время предварительно конфигурируемыми для автоматического управления. Однако вышеупомянутые компоненты могут быть просто заменены другими электрическими компонентами, как указано в первичных управляемых устройствах (106) выше. Настоящее изобретение может просто использовать электродвигатели вместо кулачкового механизма (1062) или линейных и поворотных приводов (1066). Дополнительно, соединение между одним или несколькими выходными приводными роторами (102) и одним или несколькими рычагами (104) (или любыми движущимися компонентами) может включать электромагниты (например, в корпусе (202)) и использовать магнитную левитацию для оптимизации (устранения при низкой скорости ветра и увеличения при высокой скорости ветра) трения между движущимися частями. Таким образом, количество требуемых компонентов (и движущихся компонентов) может быть уменьшено.
Возвращаясь к фиг. 1А, система (100) дополнительно содержит один или несколько узлов (108) лопастных панелей, соединенных с возможностью вращения с одним или несколькими соответствующими рычагами (104). Как показано на фиг. 1А-1С, каждый рычаг (104) соединен с одним узлом лопастей (108) на дальнем конце соответствующего рычага (104). Как видно из фиг. 1, каждый узел (108) лопастной панели содержит вспомогательный поворотный вал (1084), установленный с возможностью вращения на каждом из одного или более рычагов (104), соединенных через одно или более первичных управляющих устройств (106). Первичные управляющие устройства (106) вращают вспомогательный поворотный вал (10846) и тем самым изменяют угол атаки каждого узла (108) лопастной панели. Также предусмотрено монтажное устройство (1082), соединенное со вспомогательным поворотным валом (1084). Монтажное устройство может включать в себя одну или несколько рам, средства соединения, средства установки и т.д.
В данном примере показано, что монтажное устройство включает в себя раму лопасти, которая может иметь квадратную, прямоугольную или любую многоугольную форму. Кроме того, каждое монтажное устройство (1082) (которое в данном примере представляет собой раму лопасти) имеет одну или несколько панелей (1086) подлопастей, которые могут поворачиваться в одной или нескольких точках поворота монтажного устройства (1082). Это становится возможным благодаря одному или нескольким вспомогательным управляющим устройствам (110), соединенным с монтажным устройством (1082). Это позволяет одной или нескольким подлопастным панелям (1086) вращаться (открываться и закрываться), тем самым блокируя и/или позволяя ветру частично или полностью проходить через лопастные панели. В другом варианте воплощения монтажное устройство (1082) может включать в себя поворотное крепление/установку поворота одной или нескольких панелей (1086) подлопастей непосредственно на вспомогательном поворотном валу (1084) с помощью средств соединения (без необходимости какой-либо рамы).
На фиг. 3А-3С показан узел панели лопастей (108) с (а) закрытыми, (b) частично открытыми/закрытыми и (с) открытыми панелями подлопастей (1086). Фигуры 1А-1С и 3А-3С иллюстрируют вариант воплощения, в котором панели (1086) подлопастей поворачиваются горизонтально и разделены по одной в каждом ряду. Но в других вариантах воплощения панели подлопастей (1086) могут поворачиваться вертикально или под углом и могут быть разделены по одной в каждой колонне. В еще одном варианте воплощения может быть множество панелей (1086) подлопастей в каждом ряду и колонне (подобно шахматной доске), при этом каждая панель (1086) подлопастей или группы панелей (1086) подлопастей работают независимо. Кроме того, одна или более панелей подлопастей (1086) изготовлены из материала, выбранного, не ограничиваясь этим, из металла, неметалла, сплава, полимера, волокна, стекла, керамики, дерева или их комбинации. Узел (108) лопастной панели сам по себе является новым и инновационным, поскольку он также может быть использован для модификации существующих ветряных турбин, обеспечивая улучшения.
Как упоминалось ранее, вторичные управляющие устройства (110) сконфигурированы для облегчения поворотного движения одной или нескольких панелей (1086) подлопастей. В этом смысле вторичные управляющие устройства (110) выбираются из, не ограничиваясь ими, одного или нескольких кулачковых и толкательных устройств, серводвигателей, ременно-шкивных устройств, цепных механизмов, зубчатой передачи, линейного и поворотного привода (1066), рычажных механизмов, центрифуги, гидравлического, пневматического управления, числового управления, шаговых двигателей, электромагнитных двигателей, электромагнитов, винтовых приводов, считывателей пазов, цифровых и аналоговых элементов управления или их комбинации.
В примерном варианте воплощения, показанном на фиг. 1А-1С, вторичное управляющее устройство включает в себя управляющий стержень, двигатель (110), поворотный привод и рычаги, установленные на каждом монтажном устройстве (1082). Стержень управления соединен с каждой из одной или нескольких панелей (1086) подлопастей, а серводвигатель соединен со стержнем управления. Серводвигатель перемещает управляющий стержень, а управляющий стержень, в свою очередь, перемещает каждую из одной или нескольких панелей (1086) подлопастей, чтобы полностью открыть, частично открыть/ закрыть или полностью закрыть их.
Кроме того, система (100) содержит один или несколько датчиков (не показаны), соединенных с одним или несколькими вспомогательными вращающимися валами (1084), монтажным устройством (1082), одной или несколькими панелями подлопастей (1086) и одним или несколькими выходными приводными роторами (102). Один или несколько датчиков включают, не ограничиваются ими, датчик направления ветра, датчик скорости ветра, акселерометр, датчик гироскопа, магнитометр, датчик ориентации, считыватель пазов, считыватель выступов, оптический считыватель, датчик давления, датчик излучения, считыватель перфорированных дисков, магнитный датчик, анемометр, датчики эффекта Холла или их комбинацию. Эти датчики могут быть расположены там, где они требуются в системе (100), в зависимости оттого, где внедряется система (100).
Дополнительно, как ранее упоминалось при рассмотрении первичных управляющих устройств (106), система (100) также включает в себя главный блок управления (ГБУ (112)). В соответствии с вариантом воплощения настоящего изобретения ГБУ (112) обычно расположен между одной или несколькими структурами рычагов (104) и одним или несколькими выходными приводными роторами (102). В других вариантах воплощения, включающих множество выходных приводных роторов (102) и более одного ГБУ (112), могут быть соответствующие ГБУ (112) вместе с каждым выходным приводным ротором (102) (и его подключенными компонентами). В отличие от первичных управляющих устройств (106), ГБУ (112) может дополнительно включать в себя или быть соединенным с модулем обработки (не показан). Для вариантов воплощения, аналогичных показанному на фиг. 1А, где имеется только один выходной приводной ротор, модуль обработки может быть расположен в корпусе (202) вместе с кулачком и толкателем (1062). В других вариантах воплощения, включающих несколько выходных приводных роторов (102) и более одного ГБУ (112), может быть модуль обработки, размещенный в каждом ГБУ (112), или может быть один центральный модуль обработки для всей системы. ГБУ (112), содержащий модуль обработки, соединен с одним или несколькими датчиками, одним или несколькими первичными управляющими устройствами (106) и одним или несколькими вторичными управляющими устройствами (110). Модуль обработки может принимать входные данные от одного или более датчиков, устройств ввода или может быть подключен внешне через ЛВС/ГВС, интернет и т.д., а также может предоставлять управляющие команды одному или нескольким первичным управляющим устройствам (106) и одному или нескольким вторичным управляющим устройствам (110), и механизмов управления направлением, на основе полученных входных данных.
Модуль обработки (не показан) может включать в себя вычислительные возможности, такие как блок памяти, сконфигурированный для хранения машиночитаемых инструкций. Машиночитаемые инструкции могут быть загружены в блок памяти с непостоянного машиночитаемого носителя, такого как, не ограничиваясь этим, CD-ROM, DVD-ROM и флеш-накопители. Кроме того, машиночитаемые инструкции могут быть загружены в виде компьютерной в блок памяти. Блок памяти таким образом может быть выбран из группы, включающей EPROM, EEPROM, флеш-память и другие. Кроме того, модуль обработки включает в себя процессор, функционально соединенный с блоком памяти. В различных вариантах воплощения процессор может быть, не ограничиваясь этим, процессором на базе ARM или многоядерным процессором в форме программируемой пользователем вентильной матрицы (ППВМ), процессором общего назначения и интегральной схемой специального назначения (ИССН).
В другом варианте воплощения модуль обработки может представлять собой микроконтроллер. Микроконтроллер может включать в себя один или несколько ЦП (процессорных ядер) вместе с памятью и программируемыми периферийными устройствами ввода/вывода. Программная память в виде сегнетоэлектрической оперативной памяти, NOR накопителя или OTP ROM также часто включается в микросхему, а также небольшой объем оперативной памяти. В еще одном варианте воплощения модуль обработки представляет собой микропроцессор. Микропроцессор может представлять собой многоцелевую цифровую интегральную схему с тактовым управлением, основанную на регистре, которая принимает двоичные данные в качестве входных данных, обрабатывает их в соответствии с инструкциями, хранящимися в ее памяти, и выдает результаты в качестве выходных данных. Микропроцессор может содержать как комбинационную логику, так и последовательную цифровую логику и может действовать как SBC. В еще одном варианте воплощения модуль обработки может быть удаленно подключенным внешним интерфейсом с функциями управления, обработка загружается из внешних сетей.
Кроме того, система (100) содержит выходное устройство (114), соединенное с одним или несколькими выходными приводными роторами (102), как показано на фиг. 1А-1В. Выходное устройство (114) может быть расположено на одной или нескольких горизонтальных платформах (1202) на основании. Выходное устройство (114) выполнено с возможностью преобразования вращательного момента одного или более выходных приводных роторов (102) в одну или более форм энергии. Форма энергии может быть электрической, механической и т.д., в зависимости от применения. В этом смысле одно или несколько выходных устройств (114) могут включать в себя генераторы (для выработки электрической энергии) или для выработки механической энергии - зубчатые колеса, ремни, цепи, насосы и т.д. Выходное устройство (114) может также включать в себя принадлежности для изготовления и крепежные приспособления, а также различные виды подшипников и принадлежностей для уменьшения трения, преобразователи передаточного отношения (для увеличения/уменьшения оборотов роторов в соответствии с требованиями) и преобразователи направления с использованием трансмиссий и ремней или других средств. Проще говоря, предусмотрено, что устройство вывода (114) включает в себя всю инфраструктуру, включая вспомогательное оборудование для преобразования энергии или передачи энергии из одной точки в другую в системе (100), в пределах участка или за его пределами.
Способ работы для варианта воплощения (вертикальная ось) ветротурбинной системы (100) на основе аэродинамического сопротивления, как показано на фиг. 1А-1С:
Как уже упоминалось выше, настоящее изобретение может использовать максимальную энергию ветра при скоростях ветра в диапазоне от нескольких миль в час до сотен миль в час без каких-либо повреждений его структуры (даже при циклонных бурях). Это стало возможным благодаря двум уникальным инновационным особенностям настоящего изобретения, а именно
(1) узлы панелей лопастей (108), которые индивидуально вращаются вокруг своей оси динамически во время каждого вращения ротора в зависимости от его углового положения для оптимизации лобового сопротивления и подъемных сил при одновременном снижении обратного сопротивления;
(2) Поворотные панели подлопастей (1086) узла (108) панели лопастей, которые могут поворачиваться (открываться/закрываться) для изменения площади контакта с ветром и пропускать избыточный ветер через узел панели и предотвращать любые повреждения при ветре высокой скорости.
Теперь будет подробно описан способ работы с использованием вышеупомянутых функций. Обращаясь к варианту воплощения на фиг. 1А, предполагается, что ветер дует в прямом направлении (представлен белыми стрелками, выделенными черным цветом). Имеется четыре рычага (104), каждый из которых соединен с одним узлом (108) панели лопастей (таким образом, 4 узла (108) панели лопастей). Вспомогательные поворотные валы (1084) узлов (108) лопастных панелей поддерживаются соответствующей конструкцией рычага (104) и управляются с помощью первичных управляющих устройств (106). Следовательно, каждый узел панелей лопастей (108) выполнен с возможностью поворота, не ограничиваясь этим, на 0-270 градусов вокруг вспомогательного поворотного вала (1084). Однако в случае, если в качестве основного управляющего устройства (106) между соответствующей конструкцией рычага (104) и вспомогательным поворотным валом (1084) используется двигатель, тогда возможен также поворот узла (108) панели лопастей на 360 градусов.
Даже до начала работы настоящей системы (100) очевидно, что при определенных условиях, таких как уже дующий ветер, узлы (108) панелей лопастей могут вращаться или не вращаться из-за дующего ветра, определенная сила будет прикладываться к каждому узлу панелей лопастей (108), четыре рычага (104) будут находиться в определенном угловом положении и так далее. Поэтому сначала необходимо определить эти параметры. Таким образом, модуль обработки с помощью одного или более датчиков динамически определяет, не ограничивается этим, направление ветра, скорость ветра, скорость вращения одного или более выходных приводных роторов (102), индивидуальное угловое положение одного или более рычагов и усилие на каждую раму лопасти (1082) с использованием одного или нескольких датчиков.
Кроме того, в зависимости от направления ветра, направления вращения, требуемого для применения, и силы на каждом узле (108) панели лопастей модуль обработки, использующий один или несколько датчиков, конфигурируется для определения максимальной точки тяги в системе (100), т.е. макс, точки силы, которая вращала бы систему (100) в желаемом направлении.
Например, как показано на фиг. 1С (вид сверху системы (100)), желателен поворот против часовой стрелки (как показано жирными черными стрелками), максимальная сила сопротивления приходится на узел панели лопастей (108) справа (как показано на схеме), сила сопротивления на самом правом узле панели лопастей (108) поворачивает систему (100) против часовой стрелки вместе с ветром. Для максимального повышения тяги вперед при минимизации обратного сопротивления на других 3 панелях их угол атаки непрерывно изменяется в оптимальное положение с помощью ГБУ (112). Продолжая рассматривать фиг. 1С, узел панели лопастей (108) в крайнем левом положении, скорее всего, будет испытывать обратное сопротивление при движении против ветра и создаст проблему при вращении против часовой стрелки, поэтому его площадь контакта с ветром можно свести к минимуму, ориентируя узел панели лопастей (108) слева параллельно направлению ветра или слегка внутрь/наружу, чтобы создать некоторый возможный подъем вперед. Аналогично, узлы (108) лопастных панелей спереди и сзади (как показано внизу и вверху фиг. 1С соответственно) ориентированы таким образом, чтобы создавать лобовое сопротивление и/или подъемную силу для добавления крутящего момента от соответствующего рычага (104) в направлении против часовой стрелки (и не наоборот). Следует отметить, что эти две лопасти создают подъемную силу, а также лобовое сопротивление, и обе эти силы являются аддитивными, несмотря на то, что подъемная сила находится под прямым углом к направлению ветра, но синхронна с вращением против часовой стрелки. Все вышеупомянутые параметры динамически определяются ГБУ (112) (имеющим модуль обработки) с помощью одного или нескольких датчиков. Кроме того, следует отметить, что термин "динамически определять" используется для обозначения того, что все вышеуказанные параметры непрерывно определяются в течение каждого вращения, а не только один раз. Это дает лучший контроль системы (100) для достижения желаемых результатов.
ГБУ (112) сконфигурирован для динамической регулировки угла атаки каждого из монтажных устройств (1082) во время каждого поворота и повторения процесса при каждом повороте. Таким образом, как показано на фиг. 1С, каждый из четырех блоков (108) лопастных панелей продолжает постепенно менять свое положение с оптимизированным углом атаки, вращаясь вокруг своего соответствующего вспомогательного поворотного вала (1086) с использованием первичных управляющих устройств (106) под управлением ГБУ (112) для достижения желаемой ориентации для оптимизации переднего крутящего момента. Положения четырех узлов (108) лопастных панелей, показанных на фиг. 1С, являются симптоматичными, и, например, когда рычаги (104) поворачиваются на 90 градусов против часовой стрелки, узел (108) лопастной панели справа перемещается в положение (самое верхнее, как показано на фиг. 1С), задний перемещается влево, левый перемещается вперед (снизу, как показано на фиг. 1С), а передний / нижний перемещается вправо, и существует n других промежуточных положений в пределах поворота на 360 градусов, и панели повторяют эти положения по очереди под управлением (различных типов) ГБУ.
Следует отметить, что когда узел панели лопастей (108) слева (на фиг. 1С) перемещается вперед (т.е. в нижнее положение), он будет вращаться и изменять угол атаки приблизительно на 120 градусов ±50 градусов для перехода от ориентации внутрь к ориентации наружу, как это ранее выполнялось панелью лопастей спереди. Это внезапное вращение происходит в заранее запрограммированном положении вращения, при котором выработка обратной тяги минимальна и длится минимальное время. Главный блок управления (ГБУ (112)) облегчает вышеупомянутые функциональные возможности, используя первичные управляющие устройства (106), которые могут быть простым считывателем пазов, как показано на фиг.2 В, или сложным электронным контроллером с программированием (не показан).
В показанном примерном варианте воплощения первичные управляющие устройства (106) включают в себя кулачковый толкатель в виде считывателя пазов (1062), управляющие стержни (1064), линейные приводы, поворотный привод (1066) и т.д. Обращаясь к фиг. 2В и 2С, можно видеть, что контур кулачка сопровождается канавкой, медленно удаляющейся от центра в течение большей части вращения, а на очень небольшой части вращения она внезапно перемещается внутрь и завершает круг. Здесь на фиг. 2В показано положение контура для направления ветра с запада на восток и 2С с севера на юг, где, в то время как на фиг. 1А-С, показаны положения узла лопастей для направления ветра с юга на север. Как уже было сказано, толкатели (206) вращаются вокруг контура кулачка (204) в канавке вокруг него и дополнительно прикреплены к управляющему стержню (1064). Перемещение панелей и рычага заставляет толкатели (206) перемещаться в канавке, а форма канавки вызывает возвратно-поступательное движение (линейное движение) в управляющем стержне (1064), который заставляет узел панели лопастей оптимизировать угол атаки панелей с помощью линейных и поворотных приводов (1066).
Следует отметить, что различные участки контура кулачка (204) ответственны за вызывание вращения узла (108) панели лопастей. Например: внезапный участок погружения может вызвать большой поворот узла (108) панели лезвий, например, поворот на 120 градусов ±50 градусов, необходимый для узла (108) самой левой панели лопастей, прежде чем он достигнет положения самой нижней лопасти. Таким образом, абсолютное положение кулачка (204) играет огромную роль в отношении направления ветра. Давайте предположим, что если бы направление ветра было противоположным, то положение наклона профиля кулачка требовалось бы на противоположной (правой) стороне, как на фиг. 2В, поскольку желаемые ориентации для каждого узла панели лопастей (108) изменятся в этом положении на 180 градусов. Таким образом, после обнаружения/определения изменения направления ветра ГБУ (112) поворачивает кулачковый узел (202) в желаемом направлении, используя приводную шестерню (1070) и управляющую шестерню (1068), показанные на фиг. 1В, приводимые в действие небольшим двигателем (не полностью виден на чертеже).
Следует отметить, что вышеупомянутые компоненты и их способ, вызывающий желаемое вращение одного или более узлов (108) лопастных панелей, являются примером механических первичных управляющих устройств (106). Это означает, что, используя вышеупомянутые компоненты и способ, квалифицированный специалист может создать автоматический или полуавтоматический механизм динамического вращения одного или более узлов (108) лопастных панелей. Однако вышеупомянутые механические средства могут быть заменены электрическими, электронными, гидравлическими, пневматическими компонентами, такими как двигатели (например, шаговые/серводвигатели, поршни и т.д.), чтобы легко уменьшить количество используемых компонентов и по-прежнему выполнять механизм динамического изменения угла атаки. Помимо этого, другие средства, упомянутые в перечне первичных/вторичных управляющих устройств (106), также могут быть использованы, не выходя за рамки настоящего изобретения.
Кроме того, не следует забывать, что термин "оптимизировать", используемый в данном описании, предназначен для охвата как увеличения, так и уменьшения лобового сопротивления и подъемной силы, поскольку в некоторых погодных условиях может быть желательно уменьшить лобовое сопротивление. Таким образом, настоящее изобретение способно сделать и это.
В соответствии с вариантом воплощения настоящего изобретения может иметь место сценарий, такой как буря и т.д., когда скорость ветра превышает общие проектные целевые показатели ветротурбинной системы (100). Например: скорость ветра 50 метров в секунду считается слишком высокой для того, чтобы любая существующая ветряная турбина могла генерировать крутящий момент. Таким образом, в таком сценарии настоящее изобретение предлагает уникальную возможность пропускать ветер с опасной высокой скоростью через узел (108) панели лопастей путем соответствующего открытия всех вспомогательных лопастей, позволяя ветру проходить через него, вместо того, чтобы ударять по нему. Эта способность позволяет настоящему изобретению не только избегать повреждений, но и продолжать генерировать энергию даже в таких суровых условиях окружающей среды.
Это достигается за счет того, что каждый узел панели лопастей (108) настоящего изобретения сам состоит из поворотной одной или нескольких подлопастных панелей (1086) (см. фиг. 3). Продолжая пример на фиг. 1А, когда скорость ветра превышает заданный предел (как определено системой (100)), ГБУ (112) через модуль обработки дополнительно конфигурируется для регулировки открытия одной или нескольких панелей подлопастей с использованием одного или нескольких дополнительных управляющих устройств (110). Это позволяет ветру проходить через раму лопасти (1082) (после полного открытия будет видна рама лопасти (1082)) без каких-либо ограничений. Вторичное управляющее устройство (110) может не только уменьшить обратное сопротивление, но и регулировать, а также сглаживать крутящий момент при порывистом ветре и защищать систему (100) от ненормальных скоростей. Кроме того, это гарантирует получение надежной и оптимальной выходной мощности при очень больших колебаниях скорости ветра, без перерывов, предотвращая при этом любое повреждение системы (100).
Способность одной или более панелей (1086) подлопастей не только открываться или закрываться, но и частично открываться позволяет использовать настоящее изобретение для множества сценариев, помимо высокоскоростных ветров. Это позволяет настоящему изобретению выдерживать порывистый ветер и при этом обеспечивать постоянную производительность. Например, в случае порывов, когда скорость ветра неравномерно увеличивается с порывом ветра в течение нескольких секунд. Обычно отмечается, что это изменение составляет в пределах 20% повышения/понижения скорости ветра. Эта 20%-ная избыточная сила ветра может привести к перегрузке турбинных систем более чем на 170% во время их действия. Несмотря на небольшую продолжительность, это приведет к возникновению пульсаций в вырабатываемой электроэнергии, и, если они будут продолжаться в течение более длительного периода, это может привести к ухудшению состояния электрогенерирующего оборудования или его необратимому повреждению.
Поскольку изобретенная ветротурбинная система (100) способна запускать генерацию при более низких скоростях ветра около 3 метров в секунду или менее, она быстро достигнет своей номинальной полной мощности при средних скоростях ветра от 10 до 20 метров в секунду. В районах с хорошим ветром скорость ветра может превышать 20 метров в секунду, а скорость до 30-40 метров в секунду является вполне нормальной. В настоящей системе (100) одна или несколько панелей подлопастей могут частично открываться для регулировки выходной мощности, чтобы она постоянно оставалась оптимальной. Таким образом, настоящее изобретение позволяет управлять одной или несколькими подлопастями для создания постоянной мощности сверх расчетной оптимальной скорости ветра при полной нагрузке до, не ограничиваясь этим, 80 метров в секунду или более. Такая конструкция позволяет поддерживать и регулировать выходной крутящий момент от турбинной системы (100), чтобы он оставался на максимальном расчетном уровне, при изменении скорости ветра до десяти раз от оптимальной скорости.
В соответствии с другим вариантом воплощения настоящего изобретения, настоящая система (100) также может быть реализована в виде ветротурбинной системы на основе сопротивления (100) с горизонтальной осью. Этот вариант воплощения показан на фиг. 4А и 4В. Этот вариант воплощения предназначен для охвата более широких аспектов, которые были рассмотрены на фиг. 1А-1С, но не проиллюстрированы, таких как ориентация по горизонтальной оси (или угловая), множество выходных приводных роторов (102), множество структур рычагов на обоих концах выходных приводных роторов (102), центральный или соответствующий ГБУ (112) и т.д. Все компоненты и принципы работы, используемые в этом варианте воплощения, те же, что и в варианте с вертикальной осью на фиг. 1А, но отличается только количество компонентов и конструкция.
Как показано на фиг. 4А, на базовой конструкции (120) установлена ветротурбинная система с горизонтальной осью (100), основанная на сопротивлении. Как пояснялось ранее, базовая конструкция (120) может представлять собой, не ограничиваясь этим, башню, колонну и т.д. имеющую одну или более опор (1204) и имеющую одну или более горизонтальных платформ (1202) для размещения компонентов системы (100). В этом варианте воплощения выходное устройство (114) расположено на верхней части базовой конструкции (120). Вариант воплощения представляет один или более выходных приводных роторов (102) (скажем, два, в последовательном расположении, как показано на фиг. 4А), каждый из которых соединен с выходным устройством (114) с обеих сторон через соответствующий ГБУ (112) и первичные управляющие устройства (106), такие как шестерни, валы, шкив-ремень, цепная звездочка и т.д. для передачи энергии вращения от одного или более выходных приводных роторов (102) к выходному устройству (114) (в данном случае генератору). Модуль обработки может быть размещен в центре или размещен в соответствующих ГБУ (112). Кроме того, один или более рычагов (104) (скажем, четыре + четыре, как показано на фиг. 4А) проходят радиально (на расстоянии 90 градусов друг от друга) от обоих концов каждого из двух выходных приводных роторов (102) (что делает панели фактически на расстоянии 45 градусов друг от друга).
Кроме того, один или более рычагов (104) соединены с соответствующими узлами (108) лопастных панелей. Этот вариант воплощения отличается от компоновки с вертикальной осью, как здесь, два параллельных рычага (104) монтируют узел (108) панели лопаток вместо одной конструкции рычага в конструкции с вертикальной осью (там также можно использовать аналогичную конструкцию рычага). Опять же, каждая лопастная панель имеет вспомогательный поворотный вал (1086), который может вращаться с помощью первичных управляющих устройств (106), а также одну или более подлопастных панелей (1086), которые могут поворачиваться с помощью вторичных управляющих устройств (110). Таким образом, конструкция ветротурбинной системы (100) на основе аэродинамического сопротивления с горизонтальной осью может выглядеть как две ветротурбины, расположенные параллельно (между двумя сторонами может быть показано смещение в 45 градусов или, если требуется, до ±180°) по обе стороны от выходного устройства (114).
Как можно видеть, выходное устройство (114) размещено на корпусе (коробчатой формы, как показано на фиг. 4А), откуда по бокам подключены два ГБУ (112). Аналогично конструкции с вертикальной осью, коробчатый корпус опирается на соединенный с редуктором узел, который используется для вращения всей конструкции ветротурбины в соответствии с направлением ветра. Например: в настоящее время показано, что направление ветра является тангенциально перпендикулярным узлам (108) верхних лопастных панелей, но если направление ветра становится осевым относительно одного или более выходных приводных роторов (102), то вся конструкция ветротурбины может быть повернута на 90 градусов так, что направление ветра становится неизменным, перпендикулярно к узлам верхней лопастной панели (108) снова и всегда.
Способ работы также следует тем же шагам, что и для системы с вертикальной осью (100). Как показано на фиг. 4В, можно видеть, что ветер дует слева направо, а желаемое направление вращения одного или нескольких выходных приводных роторов (102) - по часовой стрелке. Опять же, ГБУ (112) и модуль обработки динамически определяют направление ветра, скорость ветра, скорость вращения одного или более выходных приводных роторов (102), индивидуальное угловое положение одного или более рычагов относительно точки максимальной тяги и усилие на каждое монтажное устройство (1082) с использованием одного или нескольких датчиков. Таким образом, чтобы максимально увеличить лобовое сопротивление и подъемную силу, узлы ветровых лопастей в верхней половине (как показано на фиг. 4В) ориентированы таким образом, чтобы обеспечить максимально возможную площадь и оптимальный угол падения (атаки) до 90 градусов.
Например: самый верхний узел панелей лопастей (108) удерживается перпендикулярно направлению ветра, чтобы обеспечить максимальную площадь для создания лобового сопротивления и перемещения панели с ветром, а самая нижняя лопасть, которая движется против ветра, удерживается параллельно направлению ветра, чтобы обеспечить наименьшую площадь для удара ветра и свести к минимуму обратное сопротивление. Аналогично, все один или более узлов (108) лопастных панелей сконфигурированы для достижения заданной ориентации в определенных положениях во время вращения, чтобы оптимизировать (увеличить или уменьшить) угол атаки и увеличить лобовое сопротивление и/или подъемную силу и уменьшить обратное сопротивление во время поворота детали против ветра, на основе заданного угла поворота положение для каждого узла лопастной панели (108).
Кроме того, точно так же, как в системе (100) с вертикальной осью, если скорость ветра увеличивается, открытие одной или более панелей подлопастей регулируется с помощью одного или более вторичных управляющих устройств (110) для уменьшения тяги вперед за счет уменьшения эффективной площади лопасти, контактирующей с ветром, также регулирует и смягчает крутящий момент при порывистом ветре и защищает систему (100) от скоростей, превышающих расчетные пределы. Это обеспечивает надежную и оптимальную полную выходную мощность без перерывов, предотвращая при этом любое повреждение системы (100).
Квалифицированный читатель поймет, что вышеуказанный вариант воплощения может легко работать с одним выходным приводным ротором (102) и четырьмя конструктивными рычагами на одной стороне выходного устройства (114). Но двойное расположение было показано только для того, чтобы доказать, что несколько выходных приводных роторов (102) и турбин могут быть объединены в единую систему (100). Аналогичным образом, многие такие устройства с большим количеством выходных приводных роторов (102) и последовательным/параллельным соединением и уменьшенными или увеличенными рычагами с каждой стороны возможны без выхода за рамки настоящего изобретения.
Одним из преимуществ варианта воплощения, показанного на фиг. 4А и 4В, является то, что оба набора компонентов на обоих выходных приводных роторах (102) могут быть сконфигурированы независимо или дополнять друг друга, обеспечивая при этом физическую балансировку всей конструкции. Для простоты на чертеже показаны два комплекта на одном роторе.
Независимо от реализации, будь то вертикальная ось, горизонтальная ось или под углом между ними, два новых и инновационных свойства настоящего изобретения позволяют страховать друг друга в случае сбоя одного из них. Таким образом, следующие свойства иллюстрируют гибкость и возможности устранения неполадок настоящего изобретения без нарушения его работы:
Например: В другой реализации поворотное действие одной или более панелей (1086) подлопастей позволяет настоящему изобретению работать без механизма динамического поворота ГБУ (212), управляющего каждым из узлов (108) панелей лопастей. Может возникнуть ситуация, когда вращение панели лопастей на вспомогательном поворотном валу (1086) не работает или возникает проблема в приводе вращения (1066) в любом или во всех узлах (108) панели лопастей. Тогда в этом случае любой или весь неисправный узел (108) или узлы лопастной панели могут удерживаться в прямом положении, выступая последовательно с соответствующей конструкцией рычага (104). В такой реализации вспомогательный механизм управления закрывает панели подлопастей во время движения с ветром, создающим максимальное лобовое сопротивление, и открывает все подлопасти на всех панелях во время вращения против ветра, чтобы максимально увеличить силу лобового сопротивления и уменьшить силу обратного сопротивления. Это может быть сделано, если механизм по ворота любо го одного или двух или всех узлов (108) лопастных панелей не работает.
Аналогично, в другой реализации может быть случай, когда существуют неблагоприятные погодные условия с ветрами с высокой скоростью, превышающей оптимальные расчетные пределы системы (100), и поворотное действие панелей (1086) подлопастей не работает. Таким образом, в этом случае, чтобы предотвратить любое повреждение системы (100) без прерывания выработки энергии, система (100) конфигурирует узлы (108) лопастных панелей для их динамического поворота и ориентации в положениях с наименьшим углом атаки, требуемым для продолжения вращения в желаемом направлении. В таком сценарии все узлы (108) лопастных панелей могут быть ориентированы в положении, по существу, параллельном направлению ветра. Термин "по существу" используется здесь, чтобы указать, что должен быть небольшой угол для создания лобового сопротивления для поддержания турбины и системы (100) в рабочем состоянии. Дополнительно, следует отметить, что это может быть легко сделано, если первичными управляющими устройствами (106) являются серводвигатель или шаговый двигатель или любые другие двигатели, которые могут динамически вращать вспомогательный поворотный вал (1084). Это также может быть сделано, если одна или несколько поворотных панелей (1086) подлопастей любого одного, двух или всех узлов лопастей не работают или не используются. Это исполнение может быть полезным, когда настоящее изобретение используется с обычными лопастными панелями (без поворотных подлопастных панелей (1086)).
Помимо всего вышеупомянутого описания, ниже приведены некоторые эксплуатационные различия по сравнению с известным уровнем техники:
• Ветер дует по касательной к вращению несущего винта по сравнению с осевым в известной конструкции
• Тяга ротора создается за счет лобового сопротивления (большей его части) по сравнению с подъемной силой в конструкции известного уровня техники
• Сила сопротивления и подъемная сила являются аддитивными в направлении вращения по сравнению с сопротивлением, находящимся под прямым углом в известной конструкции
• Площадь, охватываемая лопастями, намного меньше при той же производительности по сравнению с известной конструкцией
• Отношение общей тяги на башне к выходной мощности в изобретенном процессе намного лучше.
• Узел панели лопастей состоит из множества панелей подлопастей по сравнению с одной лопастью в известной конструкции.
• Абсолютный угол каждого узла панели лопастей может изменяться до 270 градусов или более при каждом обороте даже при постоянной скорости ветра по сравнению с изменением шага для всех лопастей, чтобы приспособиться к скорости ветра в конструкции предыдущего уровня техники.
• Изготовление, монтаж и транспортировка ветряных панелей просты по сравнению с предшествующим уровнем техники.
• Любое одно или оба из предлагаемых в изобретении первичных и вторичных управляющих устройств способны заставить изобретение работать и достигать более высокой производительности.
Настоящее изобретение также предлагает ряд преимуществ по сравнению с известным уровнем техники:
1. Сверхвысокая выработка энергии на квадратный метр охватываемой площади
2. Облегченная конструкция турбины
3. Легко осуществимы изготовление и сборка на месте
4. Использование детали легко контролируемых размеров даже для больших турбин сверхвысокой мощности.
5. Транспортировка материала в труднодоступное место легко осуществляется с помощью небольших деталей
6. Техническое обслуживание не требует особой инфраструктуры
7. Эффективная выработка энергии начинается при более низких скоростях ветра (даже менее 5 км/ч)
8. Может выдерживать и генерировать энергию даже при скорости ветра более 200 км/ч без каких-либо повреждений системы или перебоев в выработке энергии.
9. Встроенная защита от циклонических скоростей ветра без отключения генерирования
10. Нет необходимости в предохранительном тормозном механизме
11. При вертикальной конструкции ротора энергия вращения легко передается на землю
12. Сбор энергии может быть многоцелевым в конструкции вертикального ротора.
В общем, слово "модуль", используемое здесь, относится к логике, воплощенной в аппаратном обеспечении или микропрограммном обеспечении, или к набору программных инструкций, написанных на языке программирования, таком как, например, Java, С или assembly. Одна или несколько программных инструкций в модулях могут быть встроены в микропрограммное обеспечение, такое как EPROM. Следует понимать, что модули могут содержать соединенные логические блоки, такие как вентили и триггеры, и могут содержать программируемые блоки, такие как программируемые вентильные матрицы или процессоры. Модули, описанные здесь, могут быть реализованы как программные и/или аппаратные модули и могут храниться на любом типе машиночитаемого носителя или другого компьютерного запоминающего устройства.
Кроме того, хотя одна или более операций были описаны как выполняемые или иным образом связанные с определенными модулями, устройствами или объектами, операции могут выполняться или иным образом связаны с любым модулем, устройством или объектом. По существу, любая функция или операция, которые были описаны как выполняемые модулем, могут альтернативно выполняться другим набором модулей, сервером, платформой облачных вычислений или их комбинацией. Следует понимать, что методы настоящего предложения могут быть реализованы с использованием различных технологий. Например, способы, описанные здесь, могут быть реализованы с помощью серии исполняемых компьютером инструкций, размещенных на подходящем машиночитаемом носителе. Подходящие машиночитаемые носители могут включать энергонезависимую (например, ОЗУ) и/или энергонезависимую (например, ПЗУ, диск) память, несущие волны и средства передачи. Например, несущие волны могут принимать форму электрических, электромагнитных или оптических сигналов, передающих пары аналоговых/цифровых данных по локальной сети или общедоступной сети, такой как ЛВС, ГВС и интернет.
Следует также понимать, что, если специально не указано иное, как явствует из следующего рассмотрения, следует понимать, что на протяжении всего описания, рассмотрения, использующие такие термины, как "управление" или "получение" или "вычисление" или "хранение" или "получение" или "определение" или тому подобное, относятся к действию и процессам компьютерной системы или аналогичного электронного вычислительного устройства, которые обрабатывают и преобразуют данные, представленные в виде физических (электронных) величин в регистрах и запоминающих устройствах компьютерной системы, в другие данные, аналогичным образом представленные в виде физических величин в памяти или регистрах компьютерной системы или других подобных устройствах хранения, передачи или отображения информации.
Различные модификации этих вариантов воплощения очевидны специалистам в данной области из описания и прилагаемых чертежей. Принципы, связанные с различными вариантами воплощения, описанными здесь, могут быть применены к другим вариантам воплощения. Следовательно, описание не предназначено для ограничения вариантов воплощения, показанных вместе с прилагаемыми чертежами, но должно обеспечивать максимально широкий охват, соответствующий принципам и новым и инновационным свойствам, раскрытым или предложенным здесь. Соответственно, ожидается, что изобретение сохранит все другие подобные альтернативы, модификации и варианты, которые входят в объем настоящего изобретения и прилагаемой заявки.
Изобретение относится к ветроэнергетике. Ветротурбинная система на основе аэродинамического сопротивления с регулируемыми лопастями содержит один или несколько выходных приводных роторов, расположенных на базовой конструкции. Каждый выходной ротор соединен с одним или несколькими рычагами с использованием одного или нескольких первичных управляющих устройств. Один или несколько узлов лопастных панелей установлены с возможностью поворота с помощью одного или нескольких соответствующих рычагов. Каждый из узлов лопастных панелей содержит вспомогательный поворотный вал, установленный с возможностью вращения на каждом из одного или нескольких рычагов. Монтажное устройство соединено со вспомогательным поворотным валом, управляемым одним или несколькими первичными управляющими устройствами. Каждое устройство для установки панели лопасти вмещает одну или несколько панелей подлопастей, поворачиваемых в одной или нескольких точках поворота монтажного устройства с использованием одного или нескольких вторичных управляющих устройств, чтобы позволить одной или нескольким подлопастям поворачиваться, тем самым блокируя и/или позволяя ветру проходить через лопастные панели частично или полностью. Один или более датчиков для считывания параметров управления системой соединены с одним или более главными блоками управления (ГБУ) и с одним или более модулем обработки, одним или более первичными управляющими устройствами и одним или более вторичными управляющими устройствами. Выходное устройство выполнено с возможностью преобразования вращательного момента одного или более выходных приводных роторов в одну или более форм энергии. Техническим результатом является повышение эффективности использования ветротурбины, расширение диапазона рабочих скоростей ветра и упрощение обслуживания. 2 н. и 8 з.п. ф-лы, 4 ил.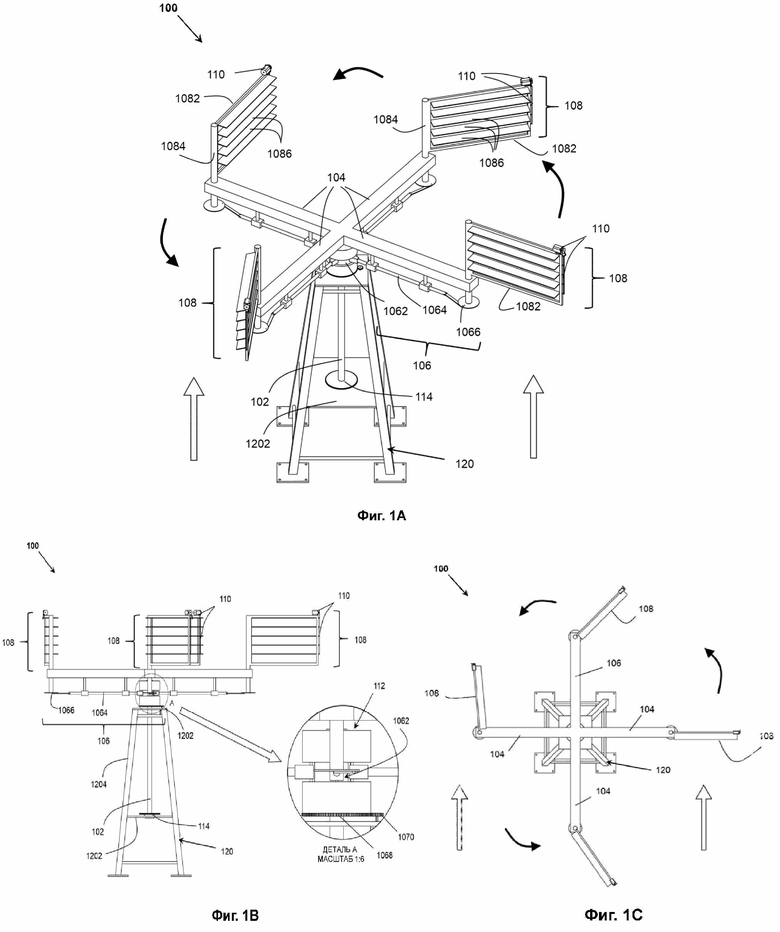
1. Ветротурбинная система на основе аэродинамического сопротивления с регулируемыми лопастями, система, содержащая:
один или несколько выходных приводных роторов, расположенных на базовой конструкции, причем каждый выходной ротор соединен с одним или несколькими рычагами с использованием одного или нескольких первичных управляющих устройств;
характеризуется тем, что
один или несколько узлов лопастных панелей установлены с возможностью поворота с помощью одного или нескольких соответствующих рычагов, причем каждый узел лопастных панелей содержит:
вспомогательный поворотный вал, установленный с возможностью вращения на каждом из одного или нескольких рычагов;
монтажное устройство, соединенное со вспомогательным поворотным валом, управляемым одним или несколькими первичными управляющими устройствами, каждое устройство для установки панели лопасти, вмещающее одну или несколько панелей подлопастей, поворачиваемых в одной или нескольких точках поворота монтажного устройства с использованием одного или нескольких вторичных управляющих устройств, чтобы позволить одной или нескольким подлопастям поворачиваться, тем самым блокируя и/или позволяя ветру проходить через лопастные панели частично или полностью;
один или более датчиков для считывания параметров управления системой, соединенных с одним или более главными блоками управления (ГБУ), соединенными с одним или более модулем обработки, одним или более первичными управляющими устройствами и одним или более вторичными управляющими устройствами; и
выходное устройство выполнено с возможностью преобразования вращательного момента одного или более выходных приводных роторов в одну или более форм энергии.
2. Система по п. 1, в которой ГБУ может быть соединен с модулем обработки и настроен для:
динамического определения или контроля направления ветра, скорости ветра, скорости вращения одного или нескольких выходных приводных роторов, индивидуального углового положения одного или нескольких устройств для установки панели лопастей относительно точки максимальной тяги и усилия на каждое устройство для установки панели лопастей с использованием одного или нескольких датчиков;
регулировки угла атаки каждого из одного или нескольких узлов лопастных панелей индивидуально и коллективно по отношению к ветру, динамически во время каждого вращения, используя основные механизмы управления, чтобы оптимизировать лобовое сопротивление и/или подъемную силу при вращении детали по ветру и уменьшить обратное сопротивление при вращении детали против ветра.
3. Система по п. 1, в которой ГБУ соединен с модулем обработки и выполнен с возможностью регулировки открытия одной или более панелей подлопастей с использованием одного или более вторичных управляющих устройств для уменьшения обратного сопротивления, регулирования, а также сглаживания крутящего момента во время порывистого ветра и защиты системы от ветра, превышающего заданные скорости, обеспечивающая надежную и оптимальную производительность без перебоев при одновременном предотвращении любого повреждения системы.
4. Система по п. 1, в которой один или более выходных приводных роторов могут быть расположены горизонтально, вертикально или под углом между ними на базовой конструкции в последовательном или параллельном расположении.
5. Система по п. 1, в которой один или более рычагов проходят радиально или тангенциально от любого из концов или участка между обоими концами каждого из одного или более выходных приводных роторов или их комбинации.
6. Система по п. 1, в которой одна или несколько панелей подлопастей выполнены с возможностью открывания вертикально или горизонтально или под углом, внутри или снаружи соответствующего монтажного устройства одного или более узлов лопастных панелей.
7. Система по п. 1, в которой одна или более панелей подлопастей выполнены из материала, выбранного из металла, неметалла, сплава, полимера, волокна, стекла, керамики, дерева или их комбинации.
8. Система по п. 1, в которой одно или несколько первичных управляющих устройств и вторичных управляющих устройств выбираются из одного или нескольких кулачковых устройств, серводвигателей, устройств ремня и шкива, механизма цепи и звездочки, механизмов зацепления, линейного и поворотного привода, рычажных механизмов, центрифуги, гидравлики, пневматического управления, числового управления, шаговых двигателей, электромагнитных двигателей, электромагнитов, винтовых приводов, считывателя пазов, цифрового и аналогового управления или их комбинации.
9. Система по п. 1, в которой один или более датчиков включают в себя датчик направления, датчик скорости, акселерометр, датчик гироскопа, магнитометр, датчик ориентации, считыватель пазов, считыватель выступов, оптический считыватель, датчик давления, датчик излучения, считыватель перфорированных дисков, магнитный датчик, датчики эффекта Холла, гравитационный переключатель, датчик наклона, кодер, датчик положения, тахометр, датчик движения или их комбинацию.
10. Узел панели лопастей для ветротурбинной системы, узел панели лопастей, содержащий:
вспомогательный вращающийся вал, установленный с возможностью вращения на одном или нескольких вращающихся рычагах ветротурбинной системы;
характеризуется тем, что
монтажное устройство соединено со вспомогательным поворотным валом через одно или несколько устройств управления, при этом монтажное устройство содержит одну или несколько панелей подлопастей, которые могут поворачиваться в одной или нескольких точках поворота на монтажном устройстве, используя одно или несколько устройств управления, чтобы позволить одной или нескольким панелям подлопастей поворачиваться для открытия и/или закрытия, тем самым блокируя и/или позволяя ветру проходить через лопастные панели частично или полностью; и
главный блок управления (ГБУ) соединен с модулем обработки, одним или несколькими устройствами управления и имеет доступ к информации, выбранной из одного или нескольких датчиков, внешних подключенных источников, механизмов обратной связи, контроллеров, программируемых устройств и их комбинации;
в котором ГБУ сконфигурирован для регулировки открытия одной или нескольких панелей подлопастей с использованием одного или нескольких устройств управления для максимального повышения прямого крутящего момента, уменьшения обратного сопротивления, регулирования, а также сглаживания крутящего момента при порывистом ветре и защиты системы от ветра, превышающего заданные скорости, обеспечивая надежную и оптимальную производительность без перерывов, в то же время предотвращая любое повреждение системы.
| СПОСОБ ОБРАБОТКИ НАРУЖНОЙ ПОВЕРХНОСТИ ИЗДЕЛИЙ ИЗ ЦИРКОНИЙ-НИОБИЕВЫХ СПЛАВОВ | 2011 |
|
RU2479403C1 |
| Устройство для транспортирования в пульверизированном состоянии пылевидных материалов | 1933 |
|
SU47988A1 |
| US 2011123332 A1, 26.05.2011 | |||
| ВЕТРОАГРЕГАТ С ПАРУСНО-ВИНТОВЫМ ДВИГАТЕЛЕМ | 1991 |
|
RU2008512C1 |
| US 2016333853 A1, 17.11.2016. | |||

