Изобретение относится к области электроэнергетики, использующей нетрадиционные и возобновляемые источники энергии, в частности ветроэлектрические установки. Оно может быть использовано для электроснабжения приморских городов и населенных пунктов, туристических лагерей, баз отдыха, геологических партий, маяков, воинских частей, научно-исследовательских станций и заповедников и других объектов, расположенных на островах, либо малообжитых местах континентального побережья, удаленных от основных источников электроэнергии, а также морских плавучих и стационарных сооружений на морском шельфе.
Известна плавучая ветроэлектрическая установка, разработанная в ФРГ, содержащая на полом валу ветроколесо пропеллерного типа с горизонтальной осью вращения, которое установлено на поворотной головке на вершине опорной башни и ориентируется по ветру с помощью виндрозы. Башня установлена на поплавке, который закреплен на якорных цепях. Регулирование выходных параметров производимой электроэнергии осуществляется поворотом лопастей ветроколеса вокруг их продольных осей, которые управляются от анемометрического датчика скорости ветра посредством штанги исполнительного механизма, проходящей внутри полого вала ветроколеса. Электрическая энергия ветрогенератора используется для получения водорода из морской воды методом электролиза и накопления его в аккумуляторах (см. Реферативный журнал "Нетрадиционные и возобновляемые источники энергии", 1989, N 9, стр. 4).
Плавучая ветроэлектрическая установка похожей конструкции разработана в США. Ее опорная башня установлена на поплавке, имеющем в плане форму диска и чечевицеобразный профиль, оканчивающийся килем, в который встроен гребной винт для поворота поплавка вокруг вертикальной оси с целью ориентации ветроколеса по ветру. Гребной винт приводится во вращение энергией, вырабатываемой ветрогенератором (см. РЖ "Нетрадиционные и возобновляемые источники энергии", 1989, N 8, стр. 7).
Преимуществом плавучих установок является возможность их размещения на водных акваториях с глубинами, достигающими сотни метров. Недостатком известных плавучих ветроэлектрических установок является большая парусность, создаваемая ветроколесами с горизонтальной осью вращения, высокой опорной башней и надводными бортами поплавков, а также большие площади сметаемых лопастями поверхностей, которые создают большие кренящие и восстанавливающие моменты, вызывающие качку и крен этих установок, что снижает их эффективность, создает опасность нарушения остойчивости при буревых ветрах и сильном волнении и увеличивает стоимость якорных систем. Расположение электрогенератора и ветротурбины на вершине высоких башен затрудняет к ним доступ, особенно при качке поплавковых корпусов.
Известна также плавучая ветроэлектрическая установка мощностью 250 кВт, являющаяся наиболее близкой к заявляемой, содержащая ветротурбину и электрический генератор с кинематическими связями, смонтированные непосредственно на и вдоль палубы судна водоизмещением 160 т так, что вал ветротурбины наклонен к плоскости горизонта под углом 55o и снабжен двумя лопастями одинаковой массы, но разной длины, описывающими при вращении ветротурбины вокруг его вала конусную поверхность. Ориентация ветротурбины по ветру осуществляется посредством устройства автоматической ориентации с исполнительным механизмом - гребным электродвигателем - и его подсистемой управления за счет разворота самого корпуса судна, стоящего на якоре и связанного с береговой энергосистемой подводным силовым кабелем. Установка снабжена якорной системой и системой защиты от буревых ветров, с датчиком частоты вращения ветротурбины и датчиком положения ее лопастей, которая срабатывает при 25 м/сек и вводит в действие устройство торможения ветротурбины и фиксации ее после остановки в таком положении, когда длинная лопасть опущена вниз и направлена горизонтально, а короткая лопасть поднята вертикально вверх (см. В. А.Коробков. Преобразователи энергии океана - Л: Судостроение, 1986, с. 104).
Преимуществом этой известной ветроэлектрической установки по сравнению с известными аналогами является значительно меньшая парусность из-за меньшей ометаемой лопастями ветротурбины поверхности и отсутствия опорной башни, меньшие величины опрокидывающих и кренящих моментов, вызываемых ветровой нагрузкой и, как следствие, меньшие величины статического крена, дифферента и нагрузок на якорную систему. Другими преимуществами установки по сравнению с известными являются ее относительно высокая мобильность, позволяющая произвести съемку с якоря и постановку на якорь без больших затрат времени, переместить на новую точку или доставить на ремонтное предприятие, а также ремонтопригодность.
Недостатком данной известной плавучей ветроэлектрической установки является подверженность ее качке из-за сравнительно большой площади омываемой водой поверхности, характерной для судовых корпусов, обуславливающей возникновение динамических кренящих моментов от воздействия волн и снижение надежности работы систем и устройств, обледенение корпуса судна, палубных механизмов и ветротурбины, расположенных непосредственно на верхней палубе, при низких температурах вследствие захлестывания их волнами из-за сравнительно малой высоты надводного борта и появление из-за этого риска потери установкой остойчивости в штормовых условиях; невозможность ориентации корпуса судна по ветру в зимний период после его вмерзания в лед; возникновение больших статических усилий на корпус судна в период подвижки ледяных полей, обуславливающих необходимость усиления и удорожания якорной системы; подверженность подводного силового кабеля силовым и механическим воздействиям, делающим вероятным его повреждение; сравнительно большие величины установленной мощности и энергозатрат на работу электропривода системы ориентации судна по ветру; невысокие быстродействие и точность этой системы; доступность палубных механизмов для посторонних лиц при необслуживаемой эксплуатации установки и для атмосферных воздействий; неудовлетворительные эстетические характеристики, выражающиеся в том, что при использовании каскада аналогичных установок прибрежная акватория загромождается десятками и сотнями надводных корпусов, ухудшающих эстетическое восприятие морской панорамы. Указанные недостатки ограничивают область применения ветроэлектрической установки регионами, не подверженными замерзанию, снижают ее надежность и эффективность использования, увеличивают срок окупаемости, противоречат канонам промышленной эстетики.
Задачей, на решение которой направлено заявляемое изобретение, является устранение указанных недостатков, а именно: расширение области применения установки, повышение надежности и эффективности ее использования, снижение срока окупаемости, а также улучшение эстетических характеристик.
Поставленная техническая задача достигается за счет того, что в известной плавучей ветроэлектрической установке, содержащей плавучий корпус, несущий электрический генератор с его вспомогательным оборудованием и ветротурбину с кинематическими связями, вал которой наклонен к плоскости горизонта и снабжен двумя лопастями одинаковой массы, но разной длины; устройство автоматической ориентации ветротурбины по ветру с электрическим исполнительным механизмом и его подсистемой управления; якорную систему с электрическими якорными лебедками; систему защиты от буревых ветров, содержащую датчик частоты вращения ветротурбины, датчик положения ее лопастей и устройство электрического и механического торможения и последующего стопорения ветротурбины в положении, при котором длинная лопасть опущена вниз и направлена горизонтально, а короткая лопасть направлена вертикально вверх; и подводный силовой кабель, соединяющий электрический генератор с береговой энергосистемой, в отличие от нее несущий корпус выполнен в виде полупогружаемой платформы, состоящей из понтона, имеющего форму опрокинутой вершиной вниз многогранной усеченной пирамиды, и расположенной над ним надводной площадки, соединенной с поверхностью понтона полыми цилиндрическими колоннами, скрепленными между собой балками жесткости.
Вал ветротурбины вместе с кинематическими связями со стороны ветротурбины размещен в усеченном яйцеобразном корпусе, который установлен с возможностью поворота на 360o посредством исполнительного механизма поворота на цилиндрической опорной башне, которая закреплена на упомянутой надводной площадке, содержит вертикально расположенный электрический генератор с его системой принудительной вентиляции и имеет высоту, равную высоте электрического генератора.
Вал ветротурбины установлен под углом 40-50o к плоскости горизонта и соединен с вертикальным валом электрического генератора посредством мультипликатора, содержащего коническую зубчатую передачу. Механизм поворота корпуса содержит двигатель-редуктор, снабженный электромагнитным тормозом и расположенный вертикально в опорной башне с выходом через ее крышу наружу оконечности выходного вала, а к днищу самого поворотного корпуса вблизи его наружного края снизу закреплено по окружности опорное кольцо П-образного профиля, между выступами которого по всей окружности кольца равномерно встроены опорные колеса поворотного корпуса, сопряженные с рельсообразным ободом, закрепленным вокруг башни, причем выступающая оконечность вала двигателя-редуктора посредством зубчатой передачи находится в зацеплении с внутренним по отношению к оси башни выступом П-образного кольца, а ниже обода к внешнему выступу этого кольца по окружности закреплено дополнительное опорное кольцо поворотного корпуса L-образного профиля, между выступами которого по всей окружности этого кольца встроена дополнительная линия колес поворотного корпуса, сопряженных с нижней поверхностью рельсообразного обода, причем длинный выступ этого кольца внутренней боковой поверхностью закреплен на внешней боковой поверхности внешнего выступа П-образного кольца.
Подсистема управления устройства автоматической ориентации ветротурбины по ветру содержит управляющий и блокирующий входы, а само устройство автоматической ориентации дополнительно включает программный контроллер, датчик направления ветра, выполненный в виде сельсина, поворотный ротор которого кинематически связан с воздушным флюгером, а статор закреплен на вершине штанги, установленной вертикально на поворотном корпусе, и преобразователь угла поворота ротора сельсина в пропорциональное ему напряжение постоянного тока меняющейся полярности, состоящий из двух полупроводниковых выпрямителей, соединенных каждый электрически на стороне переменного тока с теми фазами трехфазной обмотки статора сельсина, в которых при синфазном положении его ротора и статора наведены равные по величине, но противоположные по знаку электродвижущие силы, а на стороне постоянного тока - встречно последовательно с последующим параллельным соединением выхода преобразователя с одним из входов программного контроллера и с управляющим входом подсистемы управления исполнительным механизмом, блокирующий вход которой подключен к одному из выходов программного контроллера, причем поворотный корпус, штанга и статор сельсина, жестко связанные между собой, образуют обратную связь следящего устройства автоматической ориентации ветротурбины по ветру.
Электрические якорные лебедки якорной системы размещены каждая на надводной площадке над полой цилиндрической колонной в помещении цилиндрической формы, причем ненагруженная ветвь якорной цепи лебедки размещена в полости колонны, а нагруженная ветвь якорной цепи пропущена через отверстие в надводной площадке со стороны опорной башни и наклонный канал в корпусе понтона, нижнее отверстие которого расположено в средней по высоте части его борта-грани. Понтон разделен на один центральный и равнообъемные и расположенные вокруг него периферийные отсеки, количество которых равно числу бортов-граней понтона, сообщенные каждый посредством радиального периферийного трубопровода, снабженного электромагнитным запорным клинкетом, с общим кольцевым трубопроводом, разделенным посредством электромагнитных клинкетов на равные секторы, число которых соответствует числу бортов-граней понтона, и сообщенным посредством радиальных приемных и отливных диаметрально-симметрично расположенных трубопроводов, снабженных каждый электромагнитным клинкетом, с соответствующими забортными отверстиями понтона, причем на кольцевом трубопроводе в двух диаметрально противоположных точках установлено по одному высокопроизводительному балластно-креновому насосу, всасывающие и нагнетательные патрубки которых встроены последовательно в кольцевой трубопровод, а в самом центральном отсеке размещено вспомогательное оборудование электрического генератора и кольцевой трубопровод с балластно-креновыми насосами и клинкетами, и он имеет сообщение с надводной площадкой посредством цилиндрической шахты сообщения, снабженной входным тамбуром цилиндрической формы, расположенным на надводной площадке и примыкающим к опорной башне.
Установка дополнительно содержит следующие системы. Следящую систему автоматического регулирования глубины осадки полупогружаемой платформы, включающую электрические исполнительные механизмы в виде электроприводов балластно-креновых насосов и электромагнитных клинкетов, их подсистемы управления, программный контроллер, датчик глубины осадки полупогружаемой платформы, телеметрический канал дистанционного управления и контроля, содержащий телевизионную антенну и приемно-передающее устройство, датчик скорости ветра, выполненный в виде сельсина, поворотный ротор которого кинематически связан со свободно провисающей пластиной, выполненной из легкого материала, а статор жестко закреплен на консоли, прикрепленной к штанге датчика направления ветра, и преобразователь угла поворота ротора сельсина, соединенный своим выходом с одним из входов программного контроллера, другие входы которого подключены к выходам датчика глубины осадки платформы и телеметрического канала дистанционного управления и контроля, а выходы - к входам подсистем управления балластно-креновыми насосами и электромагнитными клинкетами, причем датчик глубины осадки платформы образует обратную связь следящей системы автоматического регулирования глубины осадки платформы.
Следящую систему автоматического выравнивания крена полупогружаемой платформы, содержащую электрические исполнительные механизмы в виде балластно-креновых насосов и электромагнитных клинкетов, их подсистемы управления, программный контроллер, телеметрический канал дистанционного управления и контроля, датчики крена полупогружаемой платформы с преобразователями угла поворота сельсина-датчика, число которых равно половине числа бортов-граней понтона, выполненные каждый в виде массивного маятника, подвешенного свободно к валу ротора сельсина, который в накрененном положении полупогружаемой платформы на один из взаимно противоположных бортов-граней понтона отклонен соответственно в ту или другую сторону от синфазного положения ротора сельсина относительно его статора, корпус которого жестко закреплен на подволоке центрального отсека понтона, а трехфазная обмотка электрически соединена через преобразователь угла поворота сельсина с соответствующим входом программного контроллера, выходы которого подключены к входам телеметрического канала дистанционного управления и контроля и подсистем управления балластно-креновыми насосами и электромагнитными клинкетами, причем сельсины-датчики крена закреплены на подволоке центрального отсека таким образом, что оси их роторов образуют друг с другом углы, установленные из соотношения 360o к числу бортов-граней понтона, при этом понтон и жестко связанные с его подволоком статоры сельсинов-датчиков крена образуют обратные связи следящей системы автоматического выравнивания крена платформы.
Следящую систему автоматического регулирования длин вытравленных якорных цепей, содержащую электрические исполнительные механизмы в виде электроприводов якорных лебедок, их подсистемы управления, программный контроллер, эхолот, датчики направления ветра и течения воды, датчики скорости ветра и течения воды, датчики тяговых усилий на якорных цепях, датчики длин вытравленных якорных цепей и телеметрический канал дистанционного управления и контроля, причем входы программного контроллера соединены электрически с выходами указанных эхолота и датчиков, а выходы - с входами подсистем управления якорными лебедками и входом телеметрического канала, при этом датчики длин вытравленных якорных цепей образуют обратные связи следящей системы автоматического регулирования вытравленных длин якорных цепей. Причем подводный силовой кабель соединен с электрическим генератором посредством промежуточного гибкого силового кабеля, проложенного со стороны днища понтона в вертикальной трубе, проходящей сквозь понтон до надводной площадки и через нее, а со стороны последней кабель уложен на барабан электрической кабельной лебедки, установленной на надводной площадке в закрытом помещении цилиндрической формы и снабженной системой автоматического регулирования натяжения промежуточного силового гибкого кабеля, содержащей исполнительный механизм в виде электропривода упомянутой кабельной лебедки, подсистему управления этим электроприводом, датчик тягового усилия на промежуточном силовом гибком кабеле, установленный на лебедке и связанный кинематически с ее барабаном, а электрически соединенный с входом подсистемы управления исполнительным механизмом, и датчик вытравленной длины промежуточного гибкого кабеля, установленный на валу кабельной лебедки и соединенный с входом программного контроллера, а система защиты от буревых ветров установки дополнительно содержит блок-программу разворота поворотного корпуса ветротурбины в подветренное положение, содержащую программный контроллер, связанный своими входами с датчиком скорости ветра, датчиком частоты вращения ветротурбины и датчиком положения ее лопастей, а выходом - с входом подсистемы управления исполнительным механизмом поворота ветротурбины, и блок-программу погружения полупогружаемой платформы на максимальную глубину осадки, содержащую упомянутую выше систему автоматического регулирования глубины осадки полупогружаемой платформы, а также датчики частоты вращения и положения лопастей ветротурбины, соединенные с входами программного контроллера этой системы.
Ограничительные и отличительные признаки заявляемого изобретения обеспечивают в совокупности решение поставленной задачи с получением следующих технических результатов: ограничение амплитуд качки и увеличение за счет этого верхнего предела рабочего диапазона скоростей ветра, эффективности и надежности использования установки в этом диапазоне, снижение степени обледенения и риска потери остойчивости при штормовой погоде, обеспечение круглогодичной эксплуатации установки при ее использовании на замерзающих водных акваториях, снижение установленной мощности и энергозатрат на работу электропривода устройства ориентации ветротурбины по ветру при одновременном повышении его быстродействия и точности, исключение силовых и механических воздействий на подводный кабель и риска его повреждения, увеличение текущей производительности и годовой выработки электроэнергии, улучшение эстетических характеристик установки и дополнительно обеспечивает повышение надежности системы защиты от буревых ветров.
Так, в плавучей ветроэлектрической установке - прототипе в качестве несущего корпуса ветротурбины используется корпус обычного судна. Такая форма корпуса имеет сравнительно большие величины площади надводного борта, длины ватерлинии и омываемой поверхности. Первый параметр способствует тому, что от воздействия устойчивого ветрового потока на надводный борт действует дополнительный статический кренящий момент, усиливающий величину постоянного крена, а порывы ветра вызывают ощутимые динамические кренящие моменты. Последние моменты возникают также от ударов волн по причине большой длины ватерлинии. Третий параметр определяет величину восстанавливающего момента, действующего на корпус при его накренении.
Попеременное действие на корпус судна результирующих кренящих и восстанавливающих моментов вызывает качку судна, причем, чем больше величины этих моментов, тем более неустойчивым на волне является корпус судна. Корпус судна, развернутый устройством ориентации носом к ветру и волне, подвержен также килевой и вертикальной качке. Эффективность работы ветротурбины в наибольшей степени снижается от килевой качки, т.к. она постоянно меняет угол между продольными осями лопастей ветротурбины и направлением ветра, снижая коэффициент использования ветра. Бортовая и вертикальная качки меньше влияют на работу ветротурбины, однако они наряду с килевой качкой создают дополнительные попеременно действующие нагрузки на ветроэлектрическую установку, вызывают вибрацию и являются причиной усталостных перенапряжений, увеличивающих вероятность поломок и аварий. Результирующее влияние крена и всех видов качки по мере усиления ветра все больше снижают эффективность установки, что вызывает необходимость ограничивать верхнее предельное значение рабочей скорости ветра по сравнению с аналогичными стационарными ветроэлектрическими установками, у которых этот параметр ограничивается только прочностными характеристиками.
В заявляемой плавучей ветроэлектрической установке несущим корпусом является полупогружаемая платформа, содержащая надводную площадку, цилиндрические колонны и понтон, которая благодаря возможности прохождения ватерлинии на уровне цилиндрических колонн и расположения понтона ниже возмущенного волнами слоя воды имеет незначительную общую длину ватерлинии при практически неизменной величине омываемой поверхности. Следствием этого является пренебрежимо малые величины динамических кренящих моментов от действия волн при большой величине восстанавливающего момента, а в результате отсутствие бортовой и килевой качки и существенное снижение вертикальной качки. Меньшее значение имеет и суммарная площадь поверхности надводных сооружений, состоящих из корпуса ветротурбины, ее опорной башни и помещений для якорных и кабельной лебедок, которым приданы округлые, т.е. аэродинамические формы.
Следовательно, на платформу будут действовать меньшие статические кренящие моменты от устойчивых ветров и меньшие динамические кренящие моменты от порывов ветра. Кроме того, в заявляемой установке предусматривается полное устранение статического крена благодаря применению системы автоматического выравнивания крена. Так, наличие этой системы, содержащей электрические исполнительные механизмы в виде балластно-креновых насосов и электромагнитных клинкетов, их подсистемы управления, программный контроллер, телеметрический канал дистанционного управления и контроля и датчики крена полупогружаемой платформы с преобразователями угла поворота сельсина-датчика, число которых равно половине числа бортов граней понтона наряду с наличием балластно-креновой системы, состоящей из центрального и равнообъемных и расположенных вокруг него периферийных отсеков, количество которых равно числу бортов-граней понтона, сообщенных каждый посредством радиального периферийного трубопровода, снабженного электромагнитным запорным клинкетом, с общим кольцевым трубопроводом, разделенным посредством электромагнитных клинкетов на равные сектора, число которых соответствует числу бортов-граней понтона, и сообщенных посредством радиальных приемных и отливных диаметрально-симметрично расположенных трубопроводов, снабженных каждый электромагнитным клинкетом, с соответствующим забортным отверстием понтона, причем на кольцевом трубопроводе в двух диаметрально противоположных точках установлено по одному высокопроизводительному балластно-креновому насосу, всасывающие и нагнетательные патрубки которых встроены последовательно в кольцевой трубопровод, обеспечивают непрерывное отслеживание крена платформы посредством датчиков крена и его устранение за счет перекачивания балласта по трубопроводам из одного периферийного отсека в противоположный.
Наконец, наличие четырех вытравленных якорных цепей, длина которых автоматически регулируется в функции погодных условий, вместо одной нерегулируемой по длине в установке-прототипе оказывает, как известно, сильное демпфирующее влияние на вертикальные перемещения полупогружаемой платформы за счет увеличения общей массы якорной цепи, автоматически возрастающей при поднятии этой платформы на волне и гасящей благодаря этому качку.
Устранение бортовой и килевой качки, ограничение амплитуд вертикальной качки и возможность автоматического выравнивания статического крена делают возможным увеличить верхний предел рабочего диапазона скорости ветра, обеспечить лучшие условия для работы ветротурбины и добиться более производительной работы установки в заданном расчетном диапазоне скоростей ветра. Вместе с тем, это приводит к снижению уровня вибрации и переменных нагрузок на ветротурбину и несущий корпус, что повышает надежность работы систем и устройств и установки в целом.
Известно, что в плавучей ветроэлектрической установке - прототипе при ее работе в свежую погоду в результате ударов волн о корпус судна происходит их захлестывание, окатывание водой верхней палубы, надпалубных построек, включая корпус ветротурбины, и долетание водяных брызг до вращающихся лопастей. При минусовых температурах наружного воздуха это вызывает одностороннее обледенение корпуса судна и надпалубных его частей, увеличение веса установки и дополнительного крена ее корпуса, что создает в условиях качки опасность потери установкой остойчивости. Обледенение лопастей приводит, в свою очередь, к увеличению их веса, нагрузок на вал и подшипниковые узлы и к усилению вибрации, что может потребовать полного прекращения работы установки даже при рабочих скоростях ветра во избежание ее поломки.
В заявляемой установке удары волн приходятся не на корпус судна, а на цилиндрические колонны, поэтому захлестывание волн и их разбрызгивание происходит в значительно меньшей степени благодаря их круглой форме и меньшей общей поверхности. Кроме того, полупогружаемая платформа снабжена системой автоматического регулирования глубины осадки, что позволяет при наступлении минусовых температур воздуха автоматически или дистанционно установить такую осадку платформы, при которой захлестывающие волны не будут достигать надводной площадки, а водяные брызги - лопастей ветротурбины. Так, делением понтона на центральный и равнообъемные, расположенные вокруг него периферийные (балластные) отсеки по числу граней-бортов понтона, в совокупности с их радиальными периферийными, общим кольцевым, разделенным на секторы по числу периферийных отсеков, и приемно-отливными, диаметрально-симметрично установленными на кольцевом трубопроводами, снабженными разобщительными электромагнитными клинкетами, и в совокупности с балластно-креновыми насосами, установленными на кольцевом трубопроводе, образуется балластно-креновая система, позволяющая регулировать осадку платформы.
При этом наличие системы автоматического регулирования глубины осадки платформы, включающей электроприводы насосов и клинкетов, их подсистемы управления, программный контроллер, датчик глубины осадки платформы, телеметрический канал дистанционного управления и контроля, содержащий телевизионную антенну и приемно-передающее устройство, и датчик скорости ветра, позволяет в совокупности с балластно-креновой системой регулировать автоматически осадку платформы. Поэтому обледенение будет наблюдаться только на цилиндрических колоннах и цилиндрической шахте сообщения, сообщающей центральный отсек с надводной площадкой. Т.е. ледяная корка будет распределяться в горизонтальной плоскости практически равномерно и симметрично. Более того, обледенения этих конструкций платформы можно избежать полностью за счет направления в полости колонн и шахты сообщения горячего воздуха, образующегося в результате нагрева электрического генератора и его вспомогательного оборудования, что достигается за счет наличия систем принудительной вентиляции оборудования электрического генератора, установленных в опорной башне ветротурбины и в центральном отсеке понтона. Следовательно, дополнительный крен платформы появляться не будет, и изменение метацентрической высоты, влияющее на остойчивость установки и вызванное некоторым увеличением веса платформы, будет происходить в значительно меньшей степени, чем в установке - прототипе.
Указанные два обстоятельства при отсутствии бортовой качки и наличии системы автоматической регулировки крена исключают риск потери установкой остойчивости из-за обледенения.
В установке-прототипе ориентация ветротурбины по ветру осуществляется за счет автоматического разворота самого корпуса судна. В связи с этим в те зимние месяцы, когда место стоянки установки покрывается льдом, ориентация корпуса судна и ветротурбины становится невозможной, а следовательно, установка в указанные месяцы становится практически неработоспособной.
В заявляемой установке несущий корпус - полупогружаемая платформа - удерживается в плоскости горизонта в неподвижном положении за счет наличия якорной системы, состоящей из нескольких якорных лебедок, размещенных каждая на надводной площадке платформы над полой цилиндрической колонной в помещении цилиндрической формы и обеспечивающей заданное неподвижное положение платформы в пространстве. Ориентация ветротурбины по ветру достигается за счет разворота только надпалубного поворотного корпуса ветротурбины вокруг опорной башни, неподвижно установленной на надводной площадке полупогружаемой платформы. Так, наличие на днище поворотного корпуса ветротурбины опорных колец П-образного и L-образного профилей со встроенными в них верхней и нижней линиями колес, сопряженными с рельсообразным ободом, закрепленным вокруг опорной башни, в совокупности с двигателем-редуктором башни, вал которого находится в зацеплении с П-образным кольцом, обеспечивает разворот поворотного корпуса на 360o. Такое решение позволяет постоянно удерживать ветротурбину развернутой по ветру независимо от положения несущего корпуса и наличия или отсутствия ледяного покрова. Следовательно, установку можно использовать круглогодично не только на акваториях, свободных ото льда, но и на замерзающих водных бассейнах.
Сравнительно большие площади подводного борта и надводных частей судового корпуса в установке - прототипе обуславливают и большие внешние силы, прикладываемые к якорной цепи в результате суммарного действия постоянного ветрового потока, течения, порывов ветра, ударов волн, а также напора льда во время ледохода и передаваемые на якорь. В результате это приводит к необходимости увеличения массы якоря, калибра якорной цепи, установленной мощности якорной лебедки и объема цепного ящика, а в итоге к удорожанию и увеличению веса всей якорной системы, увеличению времени и затрат энергии на выполнение якорных операций.
В заявляемой плавучей установке ветровые и волновые воздействия существенно уменьшаются из-за придания надводным и подводным сооружениям округлых форм, снижения суммарной площади надводной поверхности и расположения подводного понтона, в случае необходимости, ниже возмущенного слоя водной поверхности. Вследствие этого усилия на элементах якорной системы оказываются намного меньшими. Кроме того, для уменьшения силы напора льда в период ледохода, полупогружаемую платформу накануне ледостава переводят в положение наименьшей осадки, при которой ватерлиния и верхняя поверхность ледяного покрова проходят по ее нижней отметке, нанесенной на скошенных бортах-гранях подводного понтона несколько ниже его верхней поверхности.
Это достигается совокупностью системы автоматического регулирования глубины осадки платформы с трубопроводами, балластно-креновыми насосами и периферийными отсеками понтона, посредством которых по сигналу с берегового диспетчерского пульта управления о всплытии производится откачка балласта из всех периферийных отсеков одновременно. При таком полупогруженном положении понтона по отношению к ледяной корке во время ледохода вследствие напора льда на скошенный борт со стороны последнего на кромку льда будет действовать сила реакции, одна из составляющих которой создает изгибающий момент, приложенный к этой кромке, который ломает лед на куски, скользящие затем по борту под днище понтона. Кинетическая энергия движущихся масс льда растрачивается на раскалывание и дробление льда и на преодоление силы трения дробленого льда о корпус понтона. На корпус понтона и якорные цепи будет передаваться только то усилие, которое вызывает реакцию раскалывания льда.
К моменту ледохода структура льда становится пористой, рыхлой и непрочной, так что он ломается легко и большого давления на корпус понтона и якорные цепи не оказывает. Уменьшение силы давления льда на корпус понтона будет происходить еще и благодаря многогранной форме понтона, при которой лобовое давление будет испытывать только тот борт-грань, который расположен перпендикулярно направлению движения льда. К остальным бортам-граням силы давления льда прикладываются под углом так, что непосредственное давление на корпус будут оказывать только их перпендикулярные составляющие, а не полностью приложенные силы. Другие их составляющие направлены касательно к бортовым граням и давления на корпус не оказывают. Вследствие этого суммарная величина напора льда на корпус понтона снижается, что позволяет выполнить якорную систему облегченной, а следовательно, менее дорогой, менее энергозатратной и более оперативной.
В установке-прототипе для автоматической ориентации ветротурбины по ветру используется принцип разворота самого корпуса судна за счет встроенного в этот корпус электроприводного гребного винта. Такой способ ориентации связан, во-первых, с необходимостью установки значительного по мощности электропривода гребного винта, т. к. сопротивление перемещению корпуса судна лагом при его относительно больших линейных размерах велико, если к тому же учесть наличие встречного течения. Во-вторых, при развороте судно совершает циркуляцию радиусом R= L+l+l1 (где L - длина судна, l - длина вытравленной якорной цепи, l1 - дополнительная длина вытравленной цепи, зависящая от погодных условий) и покрывает достаточно большое расстояние, равное 2πR/α, зависящее от угла α изменения направления ветра. При невысокой скорости на это перемещение может быть затрачено время, исчисляемое десятками минут.
В результате энергозатраты на совершение этой работы должны быть достаточно значительными. Эти затраты возрастают многократно, если в точке стоянки установки имеется течение и его направление не совпадает с направлением ветра. В этом случае гребной винт должен работать непрерывно, чтобы компенсировать угол отклонения корпуса судна от требуемого положения. Наконец, из-за периодически действующих на корпус судна таких возмущений, как порывы ветра, удары волн о корпус и их нерегулярности точность удержания корпуса судна и ветротурбины строго по ветру невысока, что снижает эффективность работы ветропреобразователя.
В заявляемой установке принят иной способ ориентации: по ветру разворачивается только поворотный корпус ветропреобразователя, а ее несущий плавучий корпус в плоскости горизонта остается неподвижным. Вследствие меньшей массы поворотного корпуса по сравнению с массой корпуса судна, меньшего сопротивления качения колес по рельсам, по сравнению с сопротивлением воды перемещающемуся корпусу судна, а также исключения влияния встречного течения на разворот установленная мощность исполнительного механизма поворота оказывается на порядок меньше. Радиус поворотного корпуса, равный нескольким метрам, также на порядок-два меньше радиуса циркуляции R=L+l+l1, описываемой корпусом судна в установке-прототипе.
Следовательно, и путь, проходимый поворотным корпусом при развороте ветротурбины на один и тот же угол α, будет короче на один-два порядка при значительно большей скорости вследствие меньшего сопротивления повороту и меньшей массы и инерционности поворотного корпуса. Отсюда, время, требуемое на разворот ветротурбины на один и тот же угол α, в заявляемой установке будет меньше на два-три порядка по сравнению с установкой-прототипом. Таким образом, быстродействие системы автоматической ориентации ветротурбины по ветру заявляемого изобретения выше на два-три порядка при более высокой точности ее наведения и удержания в требуемом положении из-за отсутствия влияния на поворотный корпус таких возмущений, как течение и удары волн и меньшего влияния порывов ветра по сравнению с корпусом судна в установке-прототипе. Вследствие меньшей мощности исполнительного механизма (на порядок) и меньшего времени, требуемого на разворот ветротурбины (на 2-3 порядка), затраты энергии снижаются на три-четыре порядка. Причем, в заявляемой установке затрат энергии на ее удержание в заданном положении не требуется вообще, т.к. в этом положении она удерживается известным электромеханическим тормозом, встроенным в двигатель- редуктор механизма поворота корпуса ветротурбины и автоматически стопорящим его вал при прекращении подачи на него электропитания. В установке-прототипе для удержания корпуса судна по ветру в условиях возмущений требуется подрабатывать гребным винтом.
В установке-прототипе в процессе ориентации корпуса судна по ветру, последний, как описано выше, совершает большую циркуляцию радиусом R. Перемещающийся корпус судна увлекает за собой подводный силовой кабель, по которому вырабатываемая электроэнергия передается береговым потребителям. Этот кабель при этом подвергается разным силовым нагрузкам и механическим воздействиям: скручиванию, истиранию о корпус судна и каменистое дно при его волочении, натяжению и изгибу в случае его зацепления за подводные предметы. Вследствие этого высока вероятность механических повреждений дорогостоящего морского кабеля и связанного с ним ущерба, обусловленного дополнительными затратами на ремонт кабеля и простоями установки на время этих ремонтов.
В заявляемой установке подводный кабель силовым и механическим воздействиям не подвергается, т.к. полупогружаемая платформа удерживается на месте стоянки неподвижно. Возможные в процессе эксплуатации установки изменения глубины осадки полупогружаемой платформы в пределах 10-15 м, благодаря наличию системы автоматического регулирования глубины осадки с балластно-креновыми насосами, трубопроводами и отсеками, и ее незначительные смещения относительно залегающих якорей в процессе ледохода компенсируются действием системы автоматического регулирования натяжения промежуточного гибкого кабеля, содержащей электропривод кабельной лебедки, его подсистему управления, датчик тягового усилия на промежуточном силовом гибком кабеле и датчик вытравленной длины этого кабеля. При увеличении натяжения указанного кабеля более заданного кабельная лебедка потравливает автоматически силовой гибкий кабель. Тем самым устраняются опасные силовые нагрузки на этом кабеле. Предложенное техническое решение способствует повышению срока службы подводного силового кабеля и надежности всей установки.
Известно, что скорость ветра с увеличением высоты над поверхностью моря и суши растет, что объясняется снижением сопротивления, испытываемого приповерхностными слоями воздуха от их соприкосновения с неровностями поверхностей суши и волнующего моря. Поэтому при слабых и умеренных ветрах ось вращения ветротурбины целесообразно устанавливать как можно выше над уровнем моря. Однако при сильном ветре из-за волнения поверхности моря несущий плавучий корпус установки начинает испытывать качку и крен, снижающие эффективность ее работы. Чтобы избежать появления качки, необходимо увеличить осадку несущего плавучего корпуса настолько, чтобы он опустился ниже возмущенного слоя водной поверхности. Иными словами, каждому текущему состоянию погодных условий должна соответствовать своя оптимальная глубина осадки несущего плавучего корпуса.
Следовательно, для увеличения текущей производительности установки при слабых и умеренных ветрах и сохранения ее работоспособности при сильных ветрах она должна быть в общей совокупности оборудована системой автоматического регулирования глубины осадки. В заявляемой установке, как изложено выше, такая система в общей совокупности предусматривается, а в прототипе она отсутствует. Кроме того, при устойчивом свежем ветре несущий плавучий корпус испытывает статический крен (дифферент) корпуса на корму. При этом угол между продольными осями лопастей ветротурбины и направлением ветра меняется, что приводит к снижению коэффициента использования ветра, а следовательно, и текущей производительности ветротурбины. Чтобы этого не происходило, в заявляемой установке в общей совокупности применяется система автоматического выравнивания крена, отсутствующая в прототипе. Кроме того, возвышение поворотного корпуса и ветротурбины над надводной площадкой на высоту опорной башни, предложенное в заявляемой установке, позволяет уменьшить угол наклона оси вращения ветротурбины к горизонту с 55o до 40 - 50o. Тогда лопасти ветротурбины будут описывать относительно его вала конусную поверхность с поверхностным углом не 70o, а 80o - 110o. Это приводит к увеличению площади, ометаемой лопастями поверхности, а следовательно, и развиваемой ветротурбиной мощности, между которыми, как известно, существует пропорциональная зависимость.
Следовательно, уменьшение угла наклона вала ветротурбины к плоскости горизонта наряду с устранением статического крена, достигаемым благодаря наличию системы автоматического выравнивания крена в совокупности с трубопроводами, балластно-креновыми насосами и периферийными отсеками понтона, позволяет увеличить текущую производительность установки по сравнению с прототипом.
Учитывая изложенное выше, можно заключить, что все признаки, направленные на повышение устойчивости и остойчивости установки, на повышение ее текущей производительности в расчетном диапазоне рабочих скоростей ветра, на расширение верхнего предела этого диапазона, на продление эксплуатационного периода на сезон ледостава, на сокращение энергозатрат на собственные нужды, на увеличение быстродействия и точности системы автоматической ориентации по ветру, на сокращение простоев, имеют своим следствием повышение годовой выработки электроэнергии, а следовательно, уменьшение ее себестоимости и срока окупаемости установки.
В системе защиты от буревых ветров в установке-прототипе использовано устройство торможения ветротурбины, срабатывающее при достижении скоростью ветра значения, равного 25 м/сек, которое после остановки лопастей фиксирует их благодаря датчикам в положении, соответствующем нахождению длинной лопасти в нижнем горизонтальном положении, а короткой лопасти - в верхнем вертикальном положении.
В заявляемой установке в данной защите дополнительно предусмотрена блок-программа, содержащая программный контроллер, датчик скорости ветра, известные датчики частоты вращения ветротурбины и положения ее лопастей в совокупности с исполнительным механизмом поворота поворотного корпуса ветротурбины. Эта блок-программа после фиксации ветротурбины в указанном положении, благодаря наличию устройства электрического и механического торможения и стопорения, разворачивает ее в подветренное положение. При таком положении нижняя лопасть за счет разворота на 180o попадает в зону ветрового затишья, образующегося за поворотным корпусом и опорной башней, а верхняя лопасть становится своим профилем в положение флюгера, практически не оказывая ему никакого сопротивления. Тем самым, давление ветра на лопасти существенно снижается и их надежность повышается.
Кроме того, поворотный корпус, благодаря его яйцеобразной форме, имеет со стороны, противоположной турбине, более округлые, а следовательно, и более аэродинамические формы. Поэтому после ее разворота под ветер она будет оказывать ветру меньше сопротивление, что снижает величины кренящего момента и усилия на якорных цепях, повышая надежность установки в данных экстремальных условиях. Одновременно с этим в действие вступает блок-программа погружения платформы на максимальную глубину осадки, которая благодаря наличию датчика частоты вращения ветротурбины, датчика положения ее лопастей и системы автоматического регулирования глубины осадки платформы, в совокупности с трубопроводами, балластно-креновыми насосами и отсеками понтона по сигналу датчика скорости ветра о превышении скоростью ветра "буревого" значения опускает платформу на максимальную глубину, что также способствует защите установки и повышению ее остойчивости, благодаря уменьшению плеча приложения внешней силы.
При создании на базе единичных плавучих ветроэлектрических установок парка таких установок, образующих ветроэлектростанцию или каскад ветроэлектростанций, приходится сталкиваться одновременно с проблемами, связанными с требованиями промышленной эстетики. Прибрежная акватория приморского города или поселка при создании ветроэлектростанции(й) на базе установки--прототипа окажется загроможденной на большой площади надводными корпусами этих установок. Загромождение морской панорамы инородными предметами сделает морской пейзаж малопривлекательным и нанесет местному туризму определенные убытки. Если же для этой цели использовать заявляемую установку, у которой основной несущий корпус "спрятан" под водой, а над водной поверхностью выступает только приземистая башня с ветротурбиной, то, будучи удаленными на расстояние 1-3 км от берега и выкрашенными в белый цвет, башни этих установок с расположенными над ними белыми лопастями (коротким и длинным) будут восприниматься как стая опускающихся на воду (или взлетающих) чаек. Такая плавучая установка более естественно впишется в морской ландшафт и не только его не нарушит а, по мнению заявителя, даже его оживит.
Таким образом, заявляемая плавучая ветроэлектрическая установка обладает лучшими эксплуатационными (надежность, производительность, срок окупаемости и др.) и эстетическими показателями, достигаемыми за счет ограничения амплитуд качки полупогружаемой платформы, увеличения верхнего предельного значения рабочих скоростей ветра, снижения степени обледенения и риска потери установкой остойчивости, обеспечения ее круглогодичной эксплуатации и расширения областей применения на замерзающие регионы, снижения установленной мощности устройства ориентации по ветру и энергозатрат на его работу, повышения быстродействия и точности системы автоматической ориентации по ветру, исключения силовых нагрузок и механических воздействий на подводный кабель, лучшего использования ветротурбины в расчетном диапазоне рабочих скоростей ветра, увеличения годовой выработки электроэнергии, повышения надежности системы защиты от береговых ветров и улучшения эстетических характеристик установки.
Заявляемое изобретение иллюстрируется следующими графическими материалами. Фиг. 1 демонстрирует общий внешний вид плавучей ветроэлектрической установки; фиг. 2 - то же, общий вид сверху без поворотного корпуса ветротурбины; фиг. 3 - ветротурбину, поворотный корпус и опорную башню в сборе; фиг. 4 - устройство понтона в разрезе; фиг. 5 - то же, вид сверху в сечении; фиг. 6 - структурно-топологическую схему системы автоматического управления; фиг. 7 - общий вид датчиков направления и скорости ветра; фиг. 8 - принципиальную схему преобразователя угла поворота сельсина-датчика; фиг. 9 - общий вид и принципиальную схему датчика глубины осадки платформы; фиг. 10 - схему расположения датчиков крена; фиг. 11 - зависимости тока возбуждения ветрогенератора, его выходной мощности и шага лопастей ветротурбины от скорости ветра.
Плавучая ветроэлектрическая установка содержит понтон 1, изготовленный в виде многогранной, например восьмигранной, усеченной пирамиды, опрокинутой вершиной вниз. На верхней поверхности этого понтона установлены четыре полые цилиндрические колонны 2, на которые опирается надводная площадка 3. Для придания всей конструкции прочности цилиндрические колонны усилены диагонально установленными между ними ребрами 4 жесткости. Так выполнена конструкция, образующая полупогружаемую платформу установки. На надводную площадку 3 опирается неподвижно закрепленная опорная башня 5, на которую установлен поворотный корпус 6 ветротурбины, наклоненный к плоскости горизонта под углом 40 - 50o. Ветротурбина снабжена двумя лопастями 7 одинаковой массы, но разной длины, установленными в головном насадке 8 диаметрально-симметрично относительно оси вращения и выполненными поворотными относительно своих продольных осей, образующих с осью вращения ветротурбины угол 50 - 40o и описывающих при вращении вокруг этой оси конусную поверхность.
Масса лопастей ветротурбины уравновешивается противовесом 9, прикрепленным к поворотному корпусу 6 снизу со стороны, противоположной ветротурбине. Полупогружаемая платформа удерживается на месте стоянки неподвижной в плоскости горизонта за счет четырех якорных устройств, каждое из которых содержит электрическую якорную лебедку 10, установленную на надводной площадке 3 в районе цилиндрической колонны 2 внутри тамбучины 11, имеющей форму цилиндра или многогранника, судовой якорь 12, якорную цепь 13, цепной ящик, в качестве которого использовано полое пространство цилиндрической колонны 2, нижний канал 14, пересекающий корпус понтона 1 под некоторым углом в вертикальной плоскости таким образом, что нижнее отверстие этого канала расположено ниже нижней отметки ватерлинии (зимняя ватерлиния), нанесенной на скошенные борта-грани понтона 1, и верхний канал 15 в надводной площадке 3. Доступ во внутрь понтона 1 со стороны надводной площадки 3 осуществляется через цилиндрическую шахту 16 сообщения и ее тамбур 17.
Поворотный корпус 6 состоит из обтекаемого яйцеобразного кожуха 18 (фиг. 3), внутренняя полость которого разделена перегородкой 19 на две зоны. В передней зоне кожуха 18 размещены наклонный вал 20 ветротурбины, опирающийся на подшипниковый узел 21, механизм 22 изменения шага (МИШ) лопастей ветротурбины, гидромеханические тормоза 23, состоящие из поршней 24, которые несут тормозные накладки 25, прижимаемые пружинами 26 к диску 27, насаженному жестко на вал 20 ветротурбины, и упругая соединительная муфта 28, сочленяющая вал 20 ветротурбины с входным валом 29 мультипликатора 30, содержащего коническую зубчатую передачу 31 и расположенного в задней зоне кожуха 18. В этой же зоне установлен электрический гидравлический насос 32, обслуживающий МИШ 22 и гидромеханические тормоза 23. В верхней части кожуха 18 поворотного корпуса 6 предусмотрены смотровые люки с герметично закрываемыми
крышками 33. Там же в кожух 18 ввинчена полая цилиндрическая штанга 34. На днище поворотного корпуса закреплено его верхнее опорное кольцо 35, имеющее в вертикальном сечении П-образный профиль. В выступы этого кольца по всей его окружности равномерно вмонтированы опорные колеса 36, образующие верхнюю линию опорных колес. Эти колеса опираются на рельсообразный обод 37, опоясывающий верхнюю оконечность опорной башни 5 и приваренный к ее внешней боковой поверхности равномерно распределенными вокруг башни косынками 38. Под ободом 37 расположено дополнительное съемное нижнее кольцо 39 поворотного корпуса, имеющее L-образный профиль. Внутренней боковой поверхностью длинного выступа нижнее кольцо 39 закреплено на внешней боковой поверхности внешнего выступа верхнего кольца 35. В выступы нижнего кольца 39 по всей его окружности равномерно вмонтированы колеса 40, образующие нижнюю линию опорных колес и сопряженные с нижней поверхностью рельсообразные обода 37. Задняя часть кожуха 18 поворотного корпуса имеет совершенные аэродинамические формы в положении его под ветер. Все узлы и детали сопряжения поворотного корпуса 6 и опорной башни 5 защищены от попадания воды и посторонних предметов цилиндрическим съемным кожухом 41.
Опорная башня 5 состоит из съемных верхнего 42 и нижнего 43 стаканов, которые соединены друг с другом, а нижний еще и с фундаментом 44 надводной площадки 3 фланцами 45 посредством болтов и шпилек (не показаны). В полости нижнего стакана размещен электрический генератор 46, например синхронный, вертикальный вал 47 которого своим верхним концом выведен через уплотнительное соединение (не показано) в крышке (не показана) верхнего стакана опорной башни 5 наружу и сочленен с выходным валом 48 мультипликатора 30 посредством упругой соединительной муфты 49. Нижний конец вала 47 опирается на упорный подшипниковый узел 50, встроенный в фундаментное основание 44 надводной площадки 3. Исполнительный механизм поворота поворотного корпуса 6 состоит из электрического двигателя-редуктора 51, установленного внутри верхнего стакана опорной башни 5, вертикальный вал 52 которого выведен через уплотнительное соединение в крышке (не показаны) верхнего стакана опорной башни 5 наружу и снабжен зубчатой шестерней 53, входящей в зацепление с зубчатым колесом 54, приваренным к внутренней боковой поверхности внутреннего выступа верхнего опорного кольца 35 поворотного корпуса 6. Двигатель-редуктор 51 снабжен типовым электромагнитным тормозом (не показан). В верхнем стакане опорной башни 5 установлен также электрический вентилятор 55 для принудительного охлаждения электрического генератора 46 с воздуховодами (не показаны). Подвод электропитания к электрооборудованию поворотного корпуса 6 осуществлен через щеточно-кольцевые контакты 56, для доступа к которым предусмотрены герметично закрываемый люк 57 и скоб-трап 58. Для обслуживания оборудования, расположенного в опорной башне 5, последняя снабжена герметичной дверью 59 со стороны тамбура 17.
Понтон 1 разделен на один центральный 60 (фиг. 4 и 5) и восемь равнообъемных периферийных 61.1-61.8 отсеков, которые выполняют функции балластно-креновых емкостей. Под листами трюмного настила (не показаны) центрального отсека проходит кольцевой трубопровод 62, поделенный соответственно числу периферийных отсеков на восемь равных секторов (не показаны) посредством секторных электромагнитных клинкетов 63.1-63.8. Каждый сектор кольцевого трубопровода 62 соединен с соответствующим ему периферийным отсеком посредством радиального периферийного трубопровода 64.1-64.8, снабженного периферийным электромагнитным клинкетом 65.1-65.8.
В кольцевой трубопровод 62 встроены диаметрально-противоположно относительно его центра два высокопроизводительных электрических центробежных балластно- креновых насоса 66.1 и 66.2, всасывающие и нагнетательные патрубки которых (не показаны) соединены последовательно с кольцевым трубопроводом. Последний соединен, кроме того, посредством двух радиальных отливных трубопроводов 67.1 и 67.2, отходящих от его секторов, непосредственно примыкающих к нагнетательным патрубкам балластно-креновых насосов 66.1 и 66.2, с двумя отливными отверстиями (не показаны), расположенными на двух взаимно противоположных бортах-гранях понтона 1. Отливные трубопроводы 67.1 и 67.2 снабжены каждый отливными электромагнитными клинкетами 68.1 и 68.2. Кольцевой трубопровод 62 отдельными радиальными приемными трубопроводами соединен также с приемными отверстиями-кингстонами (не показано), расположенными на других взаимно противоположных бортах-гранях понтона 1 ниже уровня нижней отметки ватерлинии. Эти радиальные приемные (кингстонные) трубопроводы снабжены приемными (кингстонными) электромагнитными клинкетами (не показано). Таким образом периферийные отсеки 61, кольцевой 62, периферийные 64, отливные 67 и приемные (кингстонные) трубопроводы, а также их электромагнитные клинкеты 63, 65, 68 образуют балластно-креновую систему. В центральном отсеке 60 (фиг. 1) размещены также электрическое устройство 69 в виде статического преобразователя частоты в цепи якоря синхронного генератора 46 для согласования выходных параметров последнего с параметрами электроэнергии береговой энергосистемы (не показано), система 70 автоматического управления, контроля и защиты, электрический вентилятор 71 системы вентиляции (не показана) центрального отсека 60, тельфер 72 и другое оборудование собственных нужд.
Установка имеет элементы для следящей автоматической ориентации ветротурбины по ветру: исполнительный механизм поворота - двигатель-редуктор 51 (фиг. 3 и 6), его подсистему 73 управления, снабженную управляющим "а" и блокирующим "б" входами, датчик 74 направления ветра (фиг. 6 и 7). В качестве последнего использован сельсин 74, статор (не показан) которого закреплен неподвижно на конце вертикальной штанги 34, а ротор (не показан) соединен кинематически с воздушным флюгером 75, свободно вращающимся относительно статора. Выходные клеммы A, B, C трехфазной обмотки 76 статора соединены электрически с входами "D, E, F, G преобразователя 77 (фиг. 8) угла поворота сельсина в пропорциональное ему напряжение постоянного тока, полярность которого определяется направлением поворота ротора-флюгера 75. Этот преобразователь состоит из двух полупроводниковых выпрямителей 78, каждый из которых соединен на стороне переменного тока, соответственно, с фазами A, B и B, C статорной обмотки 76 сельсина 74, в которых при синфазном положении ротора сельсина относительно его статора, наведены равные по величине, но противоположные по знаку электродвижущие силы. На стороне постоянного тока выпрямители 78 соединены встречно-последовательно и общими выходными клеммами J, К соединены параллельно с управляющим входом "а" подсистемы 73 управления исполнительным механизмом 51 и входом F программного контроллера 79, который подключен своим выходом Т к блокирующему входу "б" подсистемы 73 управления. Соединительные провода 80 к обмоткам сельсина-датчика 74 проложены по внутренней полости 81 в штанге 34 (фиг. 7).
Таким образом данные элементы и их связи образуют следящую систему автоматической ориентации ветротурбины по ветру. Поворотный корпус 6, установленная на нем штанга 34 и статор сельсина-датчика 74, закрепленный на этой штанге, жестко связаны друг с другом и образуют обратную связь следящей системы.
Установка имеет элементы для следящего автоматического регулирования глубины осадки полупогружаемой платформы: исполнительные механизмы - электрические балластно-креновые насосы 66.1 и 66.2 (фиг. 5 и 6), подсистемы 82.1 и 82.2 управления этими насосами, исполнительные органы, функции которых выполняют секторные 63, периферийные 65, отливные 68 и кингстонные (не показаны) электромагнитные клинкеты, подсистемы 83 управления этими клинкетами, сельсин-датчик 84 скорости ветра, датчик 85 глубины осадки полупогружаемой платформы и программный контроллер 79.
Сельсин-датчик 84 (фиг. 6 и 8) закреплен в горизонтальном положении своим статором (не показан) на консоли 86, приваренной к штанге 34. Ротор (не показан) этого сельсина соединен кинематически со свободно провисающей плоской пластиной 87, изготовленной из легкого материала, например из алюминиевого сплава. Трехфазная обмотка A, B, C, (не показано) статора сельсина-датчика 84 соединена электрически с входами преобразователя 88 (фиг. 6). Соединительные провода 89 к обмоткам сельсина-датчика 84 проложены по внутренним полостям 81 в штанге 34 и 90 - в консоли 86 (фиг. 7).
Датчик 85 глубины осадки состоит из вертикальной трубки 91 (фиг. 9), примыкающей по высоте к наружной поверхности одной из цилиндрических колонн 2 со стороны опорной башни 5 и выходящей своим нижним отверстием в нижний канал 14 в понтоне 1. Внутри этой трубки помещен чувствительный резистивный элемент 92, включенный в известную схему измерительного моста 93, который уравновешен при отсутствии воды в трубке 91. Выходы C, D измерительного моста 93 соединены с входом усилителя 94. Выходные клеммы преобразователя 88 и датчика 85 глубины осадки (фиг. 6) соединены электрически с входами H и D программного контроллера 79, а выходы X и Y последнего - соответственно с входами подсистем 82.1, 82.2 управления балластно-креновыми насосами 66.1 и 66.2 и входами подсистем 83 управления исполнительными органами 63, 65, 68 балластно-креновой системы, включая кингстонные клинкеты (не показаны).
Таким образом данные элементы и связи образуют следящую систему автоматического регулирования глубины осадки полупогружаемой платформы. Датчик 85 глубины осадки платформы образует в этой следящей системе обратную связь.
Установка имеет элементы для следящего автоматического выравнивания крена полупогружаемой платформы: исполнительные механизмы - балластно-креновые насосы 66.1 и 66.2, подсистемы 82.1 и 82.2 управления этими насосами, исполнительные органы - секторные 63 и периферийные 65 электромагнитные клинкеты, подсистемы 83 управления этими клинкетами, четыре датчика 95.1-95.4 крена полупогружаемой платформы для варианта с восьмигранным понтоном 1 (фиг. 6 и 10) и программного контроллера 79.
Конструкция и электрическая схема каждого сельсина датчика 95 отличается от аналогичного датчика 84 скорости ветра лишь тем, что вал ротора (не показано) сельсина-датчика 95 связан кинематически со свободно провисающими массивным маятником 96 (фиг. 10), а его статор (не показан) закреплен неподвижно на подволоке 97 центрального отсека 60 понтона 1. Причем углы между осями роторов четырех сельсинов-датчиков 95.1-95.4 составляют 45o, что позволяет измерять крен на любой борт-грань восьмигранного понтона 1. Выходы сельсинов-датчиков 95 крена соединены электрически через преобразователи 98 (фиг. 6) с входами В программного контроллера 79, выходы X и Y которого подключены к входам подсистем 82 и 83 управления соответственно исполнительными механизмами 66 и исполнительными органами 63 и 65 балластно-креновой системы. Таким образом данные элементы и связи образуют следящую систему автоматического выравнивания крена, в которой понтон 1 совместно со статорами сельсинов-датчиков 95 образуют обратные связи.
Установка имеет элементы для следящего автоматического регулирования длин вытравленных якорных цепей 13: исполнительные механизмы - электрические якорные лебедки 10 (фиг. 1 и 6), подсистемы 99 управления этими лебедками, датчик 74 направления ветра, датчик 84 скорости ветра, датчик 100 направления течения, известный датчик 101 скорости течения, четыре известных датчика 102 длин вытравленных якорных цепей 13 и известные датчики 103 тягового усилия на якорных цепях 13, эхолот 104, программный контроллер 79, телеметрический приемник-передатчик 105 данных на береговой пульт управления диспетчера и телевизионную антенну 106.
Датчики 102 длин вытравленных якорных цепей и датчики 103 тяговых усилий кинематически связаны с валами (не показаны) и барабанами 107 якорных лебедок 10, а датчики 100 направления течения, 101 скорости течения и эхолот 104 установлены под корпусом понтона 1. Сельсин-датчик 100 направления течения известен и аналогичен по конструкции и электрической схеме датчику-сельсину 74 (фиг. 7). Он помещен в герметичный корпус, а его ротор (не показаны) соединен кинематически с водяным флюгером 108. Во избежание повреждения кусками льда во время ледохода датчик 100 огражден металлической решеткой 109 (фиг. 6), а сами датчик 101 скорости течения и эхолот 104 установлены в углублениях 110 корпуса понтона 1. Выходы датчика 100 направления течения через преобразователь 111 соединен электрически с входом А программного контроллера 79, выходы датчика 101 скорости течения, эхолота 104, датчиков 102 длин вытравленных якорных цепей и датчиков 103 тяговых усилий - соответственно с входами C, J, E и K того же контроллера. Выход Z контроллера подключен к входам подсистем 99 управления исполнительными механизмами, а выход W - с телевизионной антенной 106 через приемник-передатчик 105 телеметрического канала дистанционного управления и контроля. Таким образом данные элементы и их связи образуют следящую систему автоматического регулирования длин вытравленных якорных цепей, в которой датчики 102 образуют обратные связи.
Электрический синхронный генератор 46 соединен своей якорной обмоткой (не показано) через устройство 69 (фиг. 1) согласования параметров с промежуточным гибким силовым кабелем 112, некоторая часть которого намотана на барабан 113 (фиг. 6) электрической кабельной лебедки 114 (фиг. 1), а другая пропущена через вертикальную трубу 115, проходящую сквозь понтон 1 под него. С помощью сростка 116 промежуточный гибкий силовой кабель 112 соединен с подводным силовым морским кабелем 117, проложенным по дну моря.
Установка имеет элементы для автоматического регулирования натяжения промежуточного гибкого силового кабеля 112 (фиг. 1 и фиг. 6): исполнительный механизм - электрическую кабельную лебедку 114, подсистему 118 управления этой лебедкой, датчик 119 тягового усилия на промежуточном гибком силовом кабеле, установленный на лебедке 114 и соединенный кинематически с ее барабаном 113, а электрически - с входом подсистемы 118 управления исполнительным механизмом 114, и датчик 120 вытравленной длины промежуточного силового гибкого кабеля 112, соединенный кинематически с валом (не показан) кабельной лебедки 114, а электрически - с входом L программного контроллера 79. Таким образом данные элементы и связи образуют систему автоматического регулирования натяжения промежуточного силового кабеля 112, размещенную в цилиндрической тамбучине 121.
На понтоне 1 установлены кнехты 122 (фиг. 1), а поворотный корпус 6 оборудован гидросистемой 123, обслуживающей МИШ 22 и механические тормоза 23 (фиг. 6).
Плавучую ветроэнергетическую установку используют следующим образом.
После завершения монтажных работ установку буксируют к месту стоянки. Буксировку установки производят с помощью буксира (не показано) после того, как полупогружаемую платформу переводят в транспортное положение, чему соответствует ее осадка по нижней отметке ватерлинии (зимняя ватерлиния). Этой осадке соответствует заполнение балластно-креновых емкостей 61.1-61.8 на 30-40% их объема (фиг. 4 и 5). Их заполнение производят через приемные кингстонные клинкеты (не показаны). Перед буксировкой платформы выравнивают ее крен, для чего гибким силовым кабелем 112 установку подключают к береговой энергосистеме или электростанции буксира (не показаны) и на распределительный щит установки (не показан) и систему 70 управления подают питание (фиг. 1). Известным способом переводят управление установки в автоматический режим. Вслед за этим происходит автоматическое выравнивание крена платформы по следующей программе (см. фиг. 5, 6, 10). Если понтон 1 имеет крен в сторону периферийного отсека 61.1, то величина угла этого крена измеряется одним из датчиков 95 крена, а именно тем из них, у которого ось ротора-маятника 96 перпендикулярна диаметральной оси понтона, проходящей через его периферийные отсеки 61.1 и 61.5.
Сигнал, пропорциональный измеренному углу крена, через преобразователь 98 направляется в программный контроллер 79, который после расшифровки кода сигнала данного датчика формирует управляющие единичные сигналы на выходах Y, которые направляются на подсистемы 83 управления периферийными 65.1, 65.5 и секторными 63.1-63.4 электромагнитными клинкетами. После их открытия программный контроллер 79 формирует управляющий единичный сигнал на выходе X, который посылается на подсистему 82.1 управления балластно-креновым насосом 66.1, который запускается и перекачивает воду (балласт) из отсека 61.1 по радиальному периферийному трубопроводу 64.1, кольцевому трубопроводу 62, радиальному периферийному трубопроводу 64.5 в отсек 61.5. По мере выравнивания крена понтона 1 статор соответствующего сельсина-датчика 95 поворачивается относительно его неподвижно провисающего ротора-маятника 96, уменьшая угол рассогласования между роторной и статорной обмотками данного сельсина-датчика. После полного выравнивания крена ротор и статор того же сельсина-датчика 95 приходят в синфазное положение и сигнал на его выходе исчезает. В этот момент программный контроллер 79 снимает единичные сигналы на выходах X и Y, останавливая насос 66.1 и закрывая клинкеты 63.1-63.4 и 64.1, 64.5.
Если крен понтона 1 окажется на противоположный борт, то у того же сельсина-датчика 95 крена его маятник отклоняется в обратную сторону и с выхода его преобразователя 98 будет сниматься сигнал обратной полярности. Тогда программный контроллер 79 пошлет управляющие единичные сигналы на открытие периферийных 64.1, 64.5 и секторных 63.5-63.8 электромагнитных клинкетов и запуск балластно-кренового насоса 66.2. Последний начнет откачивать балласт из отсека 61.5 и по кольцевому трубопроводу 62 перекачивать его по часовой стрелке в отсек 61.1. На этом операцию выравнивания крена заканчивают.
Буксирный трос, поданный с буксира для буксировки, закрепляют за кнехты 122 (фиг. 1). (На эти же кнехты заводят и швартовые тросы при стоянке платформы у причала или у швартовой бочки на рейде.) После доставки полупогружаемой платформы на место стоянки производят ее раскрепление посредством якорей 12. Положение платформы в плоскости горизонта и углы разводки якорных цепей 13 устанавливают с учетом господствующих ветров и течений. При этом заводку якорей под заданным углом также производят с помощью буксира. Окончательную же ориентацию платформы производят путем потравливания одних якорных цепей и выбирания других посредством якорных лебедок 10. При этом, вначале подключают подводный силовой морской кабель 117 к промежуточному гибкому силовому кабелю 112 посредством сростка 116 и подают питание.
При слабом ветре (менее нижнего рабочего предела, обычно равного 4-5 м/сек) установка бездействует. Вал 20 ветротурбины (фиг. 3) заторможен механическими тормозами 23, стопорящими диск 27 посредством накладок 25, прижимаемых к диску пружинами 26. Вал двигателя-редуктора 51 механизма поворота поворотного корпуса 6 также заторможен посредством типового электромагнитного тормоза (не показан). Поскольку на высоте скорости ветра выше, чем у поверхности воды, следящая система автоматического регулирования глубины осадки полупогружаемой платформы установит ее на минимальную глубину. Это произойдет следующим образом. По сигналу датчика 84 (фиг. 2 и 6) скорости ветра, поступающему через преобразователь 88 в программный контроллер 79 на его вход H, последний на выходе Y сформирует сигнал заданной глубины осадки полупогружаемой платформы, посылаемый на подсистемы 83 управления всех периферийных 65, отливных 68 и секторных 63 электромагнитных клинкетов, за исключением секторных клинкетов, имеющих номера 63.2 и 63.6.
Приемные кингстонные клинкеты остаются закрытыми. По этим сигналам происходит открытие указанных клинкетов, после чего контроллер 79 со своего выхода X посылает единичный сигнал на подсистемы 82.1 и 82.2 управления на включение обоих балластно-креновых насосов 66.1 и 66.2. Начинается откачка балластной воды за борт из всех периферийных отсеков 61 одновременно через радиальные периферийные 64, кольцевой 62 и радиальные отливные 67 трубопроводы. По мере всплытия платформы до заданной отметки датчик 85 глубины осадки формирует сигнал обратной связи, приходящий на вход D контроллера 79. По этому сигналу управляющие команды на выходах X и Y контроллера блокируются, так что указанные выше электромагнитные клинкеты закрываются, а насосы останавливаются. Минимальная глубина осадки установлена по сигналу датчика 84.
По мере увеличения скорости ветра до нижнего рабочего значения по сигналу датчика 84 программный контроллер 79 единичным сигналом, формируемым на его выходе Т и посылаемым на вход "б" подсистемы 73 управления исполнительным механизмом 51, разрешает системе автоматической ориентации ветротурбины по ветру выполнить разворот поворотной головки 6 навстречу ветру. Он будет выполняться в такой последовательности: вследствие того, что воздушный флюгер 75 под действием потока ветра будет удерживать ротор сельсина-датчика 74 в несинфазном положении относительно его статора, с выхода последнего через преобразователь 77 будет посылаться сигнал рассогласования, полярность которого определяется по направлению поворота флюгера 75 относительно штанги 34. Этот сигнал приходит на управляющий вход "а" подсистемы 73 управления, растормаживает электромагнитный тормоз (не показано) вала двигателя 51 и включает исполнительный механизм 51 на разворот ветротурбины в направлении поворота флюгера 75.
Вращение зубчатой шестерни 53, сидящей на выходном валу 52 этого механизма (фиг. 3), будет передаваться через зубчатое колесо 54 кольцу 35, а вместе с ним - поворотному корпусу 6 и штанге 34. Вместе со штангой поворачивается и статор сельсина-датчика 74 относительно ротора флюгера 75, удерживаемого потоком ветра в неподвижном положении. Когда статор сельсина 74 занимает синфазное положение относительно его ротора, сигнал на выходе преобразователя 77 исчезает, двигатель-редуктор 51 останавливается, а его вал затормаживается известным способом упомянутым типовым электромагнитным тормозом (не показано). Ветротурбина развернута по ветру.
Далее по известному алгоритму программный контроллер 79 производит запуск электрогидронасоса 32 и после повышения давления в гидросистеме 123 поворотного корпуса 6 до нормы происходит растормаживание вала 20 ветротурбины за счет подачи рабочей жидкости в гидроцилиндры 23, которые переместят их поршни 24, сжимая при этом пружины 26, отводя фрикционные колодки 25 от тормозного диска 27 и освобождая последний. Одновременно с этим известная следящая система автоматического регулирования шага лопастей ветротурбины, включающая датчик 84 скорости ветра и исполнительный механизм 22 изменения шага, выводит лопасти 7 на максимальный угол атаки αмакс соответствующий данной минимальной скорости ветра (фиг. 11). Ветротурбина передает вращение через соединительную муфту 28 и мультипликатор 30 валу 47 электрического генератора 46. По сигналу датчика частоты вращения генератора (не показан) программный контроллер 79 включает вентилятор 55 охлаждения генератора и его возбуждение. После этого генератор 46 начинает вырабатывать электроэнергию, параметры которой стабилизируются и согласовываются с параметрами береговой энергосистемы известным устройством 69 согласования. Береговым потребителям электроэнергия передается по промежуточному гибкому силовому кабелю 112 и подводному силовому морскому кабелю 117, соединенному сростком 116.
Далее установка продолжает работать в автоматическом режиме при разных погодных условиях. При этом управление установкой происходит по критерию обеспечения оптимальной производительности при текущих переменных условиях ее функционирования с учетом ограничений на показатели качества вырабатываемой электроэнергии и предельные величины контролируемых параметров.
Обеспечение оптимальной производительности является конечным результатом управления установкой по нескольким частным программам, выполняемым отдельными системами автоматического регулирования при координации их работы из единого центра - программного контроллера 79. Работа этих систем осуществляется следующим образом.
Работа следящей системы автоматического регулирования шага лопастей ветротурбины
В установке использована известная конструкция механизма 22 изменения шага лопастей, регулирование которого производят по известному алгоритму, разработанному для синхронного генератора 46, у которого выходные параметры стабилизируют и согласовывают посредством статического преобразователя 69 частоты, включенного последовательно в цепь якорной обмотки этого генератора. Регулирование шага лопастей по этому алгоритму управления осуществляется по сигналу, вырабатываемому датчиком 84 скорости ветра, как указано выше. В частности, регулирование шага будет производиться, как показано на фиг. 11. В нижнем диапазоне рабочих частот вращения (зона А) генератор 46 работает при наибольшем (номинальном) и неизменном токе возбуждения Iвном = const. Поэтому его мощность P зависит только от его частоты вращения. При этом частота вращения ветротурбины и генератора при текущем установившемся значении скорости ветра зависит от величины коэффициента использования ветра, который, в свою очередь, является функцией шага лопастей. Следовательно, каждой текущей скорости ветра соответствует определенный шаг лопастей, при котором коэффициент использования ветра имеет наибольшее для данных условий значение. Поэтому в нижней зоне А скоростей ветра шаг лопастей должен непрерывно изменяться, что и осуществляется следящей системой автоматического регулирования шага лопастей 7. Зависимость мощности, развиваемой ветротурбиной с фиксированным и регулируемым шагом лопастей, от скорости ветра в зоне А показаны на фиг. 11 кривыми 1 и 2, соответственно.
В верхнем диапазоне В рабочих частот вращения вырабатываемая генератором 46 мощность должна ограничиваться на уровне его номинальной мощности Pном по условиям электрической нагрузки самого генератора и его вспомогательного электрооборудования, а также по условиям механической прочности узлов кинематики. Постоянство развиваемой мощности удобнее регулировать в этой зоне за счет уменьшения тока возбуждения генератора 46 при неизменном значении шага лопастей. При скоростях ветра, близких к максимальному рабочему значению, окружная скорость вращения лопастей, особенно на их концах, достигает больших значений и на лопасти действуют опасные по величине центробежные силы. Чтобы при указанных скоростях ветра ограничить действие этих сил, стабилизацию развиваемой мощности производят совместным изменением как шага лопастей ветротурбины, так и током возбуждения генератора.
Работа следящей системы автоматического регулирования глубины осадки полупогружаемой платформы
В момент ввода ветроэлектрической установки в действие она имеет, как описано выше, наименьшую осадку. Ватерлиния при этой осадке (зимняя ватерлиния, фиг. 1) проходит по корпусу понтона 1 и омываемая поверхность имеет наибольшее значение. Из-за этого по мере увеличения скорости ветра вместе с усилением волнения поверхности моря начинается качка платформы. Из-за качки лопасти 7 ветротурбины непрерывно меняют свое положение относительно направления потока ветра и частота вращения ветротурбины становится неравномерной. В этих условиях генератор 46 вырабатывает электроэнергию низкого качества и в меньшем количестве. Для стабилизации платформы в этих условиях увеличивают глубину ее осадки настолько, чтобы понтон 1 опустился ниже возмущенного слоя водной поверхности, толщина которого зависит от высоты волн. Между скоростью ветра, высотой волн и толщиной возмущенного слоя воды имеются определенные известные зависимости. По величине сигнала текущей установившейся скорости ветра, вырабатываемого датчиком 84 и направляемого через преобразователь 88 на вход H программного контроллера 79 (фиг. 6), последний рассчитывает сигнал заданной глубины осадки, устанавливает его на своих выходах Y, с которых он поступает на подсистемы 83 управления всеми секторными 63, периферийными 65 и кингстонными (не показаны) электромагнитными клинкетами. Забортная вода через приемные кингстонные клинкеты, кольцевой 62 и радиальные периферийные 64 трубопроводы самотеком будет поступать во все периферийные отсеки 61 одновременно. По мере увеличения осадки платформы, измеряемой датчиком 85, изменяется сигнал на выходе последнего. Как только этот сигнал сравняется по величине с задающим сигналом, рассчитанным программным контроллером 79, на его выходах Y устанавливается сигнал "0", указанные выше клинкеты закрываются и поступление воды в балластные емкости прекращается. Осадка платформы увеличена до заданной отметки.
При снижении скорости ветра сигнал на выходе датчика 84 скорости ветра уменьшается. Программный контроллер 79 пересчитывает сигнал заданной глубины стоянки и в соответствии с этим сигналом на своих выходах Y меняет сочетание открываемых и закрываемых клинкетов. В частности, приемные кингстонные клинкеты (не показаны) и секторные электромагнитные клинкеты 63.2 и 63.6 остаются закрытыми, а все остальные открываются. Вслед за этим устанавливается командный сигнал на выходах X контроллера 79, который приходя на подсистемы 82.1 и 82.2 управления, включает балластно-креновые насосы 66.1, 66.2, посредством которых вода из всех балластных емкостей 61 будет откачиваться одновременно за борт через радиальные отливные трубопроводы 67. Полупогружаемая платформа начинает всплывать до заданной отметки, как изложено выше.
Если температура наружного воздуха достигает устойчивых отрицательных значений, то с берегового диспетчерского пульта поступает сигнал ограничения максимальной глубины осадки, передаваемый по каналу телеметрической связи 105, 106 в программный контроллер 79. После поступления этого сигнала он запоминается в памяти последнего и полупогружаемая платформа не сможет погружаться ниже той отметки, при которой наступает опасное обледенение надводной площадки из-за захлестывания волн. Это ограничение действует до тех пор, пока не будет послан сигнал снятия данного ограничения.
В зимний период после вмерзания понтона 1 в лед программу автоматического регулирования глубины осадки полупогружаемой платформы с того же диспетчерского пульта полностью блокируют до окончания ледохода.
Работа следящей системы автоматического регулирования длин вытравленных якорных цепей
Изменения глубины осадки полупогружаемой платформы в зависимости от степени волнения моря, циклические приливно- отливные изменения глубины стоянки установки и скорости течения, а также необходимость увеличения держащей силы якорей в период ледохода обуславливают необходимость изменения длин вытравленных якорных цепей. При отсутствии ледяного панциря указанные длины l определяются текущим значением расстояния H от днища понтона до дна моря, погодными условиями и параметрами течения
l = kH+Δl1=Δl2,
где k - эмпирический коэффициент корреляции, зависящий от расстояния H; вводится в память коммутатора 79 как функция H,
Δl1 - поправка на параметры ветра;
Δl2 - поправка на параметры течения.
Сигнал, пропорциональный расстоянию H, формируется эхолотом 104 и посылается на вход J программного контроллера 79 (фиг. 6). Скорость и направление ветра измеряются соответствующими датчиками 74 и 84, а параметры течения - датчиками 100 направления и 101 скорости течения. Сигналы этих датчиков также посылаются на входы F, H, A и C контроллера 79. Через заданные интервалы времени программный контроллер 79 опрашивает показания указанных датчиков, вычисляет по имеющейся в его памяти программе поправки Δl1 и Δl2 для каждой якорной цепи в отдельности, а также определяет расчетное значение их длин l и после этого на выходах Z формирует управляющие сигналы, направляемые на подсистемы 99 управления якорными лебедками 10, которые изменяют длины вытравленных якорных цепей 13 (фиг. 1). В частности, при значительном усилении ветра (либо скорости течения) якорная цепь с наветренной стороны (либо со стороны течения) потравливается, с подветренной стороны платформы (либо со стороны, попутной течению) якорная цепь выбирается, а с бортов, расположенных по оси, перпендикулярной направлению ветра (течения), длины якорных цепей не меняются либо подтравливаются незначительно. В процессе работы якорных лебедок 10 датчиками 102 производится отслеживание длин вытравленных или выбранных якорных цепей и, когда сигналы этих датчиков, направляемые на вход E программного контроллера 79, становятся равными заданным, то работа якорных лебедок прекращается. Во время сильного прилива и прочих равных условиях по сигналам, вырабатываемым тем же программным контроллером 79, якорные лебедки потравят одновременно все якорные цепи 13 на одну и ту же величину, а при отливе, наоборот, выберут часть смычек (звеньев) этих цепей.
При ледоходе усилие, прикладываемое к платформе и к якорной цепи, расположенной со стороны движущейся массы льда, возрастает и платформа смещается по направлению движения льда. Чтобы сохранить провисание якорной цепи и одновременно увеличить ее держащую силу, последнюю со стороны движущихся масс льда необходимо потравливать до тех пор, пока эти силы не выравняются. Образующуюся при этом слабину якорной цепи с противоположного борта выбирают. Управление работой якорных лебедок 10 в этот период производится по командам программного контроллера 79, получающего информацию на входах K от датчиков 103 тяговых усилий на якорных цепях.
Работа системы автоматического регулирования натяжения электрического кабеля
При горизонтальных и вертикальных перемещениях платформы у промежуточного гибкого силового кабеля 112, намотанного на барабан 113 кабельной лебедки 114, следует либо выбрать его лишнюю слабину, либо потравить во избежание чрезмерного его натяжения и обрыва. Регулирование натяжения промежуточного гибкого кабеля 112 осуществляется по сигналам датчика 119 тягового усилия на этом кабеле, установленного на барабане 113 кабельной лебедки 114. Эти сигналы приходят в подсистему 118 управления этой лебедкой. На валу кабельной лебедки (не показано) установлен также датчик 120 вытравленной длины промежуточного гибкого силового кабеля. В случае, если весь этот кабель будет вытравлен, программный контроллер 79 пошлет по телеметрическому каналу связи 105, 106 соответствующую информацию на береговой пульт диспетчера для принятия своевременных мер.
Использование установки в зимних условиях
С понижением температуры наружного воздуха до минусовых значений с берегового пульта диспетчера поступает сигнал ограничения глубины осадки полупогружаемой платформы, который через антенну 106 принимается телеприемником 105 и направляется в программный контроллер 79. Получив этот сигнал, система автоматического регулирования глубины осадки продолжает функционировать, как описано выше, однако, максимальная осадка ограничивается заданной величиной, которая может корректироваться дистанционно в зависимости от погодных условий. Это ограничение вводят с целью предотвращения обледенения частей надводной площадки 3 от захлестывающих волн. Ограничительную величину осадки устанавливают на таком уровне, чтобы при наибольшей расчетной высоте волн разлетающиеся брызги не достигали надводной площадки. Тогда захлестыванию волнами будут подвергаться только цилиндрические колонны 2, ребра жесткости 4 и шахта соединения 16, что незначительно. Чтобы уменьшить обледенение и этих конструкций платформы горячий воздух из контура охлаждения электрического генератора 46 при необходимости направляют через заслонку по воздуховодам (не показано) в цилиндрические колонны 2, в которые этот воздух будет нагнетаться вентилятором 55, подогревая их изнутри. Шахта 16 сообщения также будет обогреваться потоком теплого воздуха, поднимающегося из центрального отсека 60 понтона 1 за счет его естественной конвекции. В центральном отсеке 60 воздух подогревается теплом, излучаемым в пространство расположенным там силовым электрооборудованием, в которое входят статический преобразователь 69 частоты, распределительный щит, согласующий трансформатор (не показаны), балластно-креновые насосы 66.1 и 66.2.
Накануне ледостава полупогружаемая платформа переводится на минимальную глубину осадки по сигналу с берегового пульта диспетчера. После выравнивания крена работу системы автоматического регулирования осадки и крена блокируют. При минимальной осадке (зимняя ватерлиния) верхняя часть понтона 1 незначительно выступает над поверхностью воды (фиг. 1), ветротурбина находится на максимальном возвышении над уровнем моря, и в таком положении понтон 1 вмерзает в лед, чем обеспечивается надежная устойчивость платформы даже в период буревых ветров. Якорные цепи 13 и промежуточный гибкий силовой кабель 112 в лед не вмерзают благодаря расположению их клюзов ниже ледового панциря. Поскольку платформа в указанный период неподвижна, работу систем регулирования длин вытравленных якорных цепей 13 и промежуточного гибкого кабеля 112 блокируют. В работе оставляют системы автоматического регулирования шага лопастей ветротурбины и ориентации ее по ветру.
С окончанием зимнего сезона накануне ледохода командами с берегового диспетчерского пульта управления вводят в действие ранее заблокированные системы автоматического регулирования якорных 10 и кабельной 114 лебедок. Когда начинается подвижка льда, корпус понтона 1 начинает испытывать давление со стороны масс движущегося льда. Благодаря наклонной льдоустойчивой форме бортов-граней и округлой (восьмигранной) форме периметра понтона 1 лед в месте его стыка с лобовым бортом-гранью начинает ломаться под действием силы реакции и дробиться под напором массы сплошного льда. Расколотый лед начинает обтекать округлый понтон, а раскрошенные и раздробленные куски льда скользят по наклонным лобовому и боковым бортам-граням понтона под его корпус. Чтобы исключить повреждение выступающих из корпуса понтона 1 снизу трубы 105 для промежуточного силового гибкого кабеля 112 и датчиков 100, 101 и 104, первая имеет усиление приваренными косынками (не показаны), а вторые - ограждение металлической решеткой 109 (датчик 100), либо они установлены в углублении корпуса понтона (датчики 101 и 104).
Под напором массы льда платформа начинает смещаться по направлению движения льда. Якорная цепь 13 со стороны действия внешних сил вытягивается в струну, уменьшая при этом держащую силу якоря 12. Чтобы сохранить держащую силу якоря без изменения и увеличить ее за счет создания дополнительной силы трения якорных звеньев о грунт морского дна, якорную цепь 13 необходимо потравить до установления равенства сил, приложенных к нижнему каналу 14, т. е. внешней силы со стороны льда и результирующей держащей силы якоря и якорной цепи. С противоположного борта понтона 1 якорная цепь получает слабину, которую необходимо выбирать, сохраняя у этой якорной цепи форму провисающей нити. С промежуточным силовым гибким кабелем 112 также производят одну из этих операций в зависимости от направления движения льда: в сторону берега или в сторону моря.
Указанные действия выполняют с помощью якорных лебедок 10 и кабельной лебедки 114. Включение соответствующей якорной лебедки 10 на травление ее якорной цепи 13 происходит по команде программного контроллера 79, посылаемой на подсистему 99 управления этой лебедкой, в тот момент, когда усилие на ее якорной цепи, измеряемое датчиком 103 тягового усилия и посылаемое на вход K контроллера 79, превысит установленное значение. Остановка данной якорной лебедки происходит после снижения тягового усилия на ее якорной цепи до установленного значения.
Аналогично этому включение другой якорной лебедки 10 с противоположного борта на выбирание ее якорной цепи 13 осуществляется по сигналу датчика 103 тягового усилия, установленного на данной якорной лебедке, об уменьшении силы натяжения якорной цепи ниже установленной величины. Остановка этой лебедки происходит после того, как усилие на ее якорной цепи восстановится до прежнего заданного значения. Регулирование натяжения промежуточного гибкого кабеля 112 производится по такому же алгоритму посредством кабельной лебедки 114, включаемой на травление кабеля 112, когда датчик 119 тягового усилия на кабеле измерит его превышение выше заданного значения.
Включение кабельной лебедки на выбирание слабины у этого кабеля происходит в тот момент, когда тяговое усилие на кабеле 112 становится меньше заданной величины. Длины дополнительно вытравленной якорной цепи 13 с одной стороны платформы и дополнительно выбранной якорной цепи с противоположной стороны, а также длины вытравленного (или выбранного) промежуточного гибкого силового кабеля 112 рассчитываются программным контроллером 79 по показаниям соответствующих датчиков 102 и 120 до включения соответствующей лебедки и после ее остановки. Эти расчетные данные запоминаются в контроллере 79. По окончании ледохода по сигналу с берегового пульта диспетчера программный контроллер 79, управляя теми же якорными и кабельной лебедкой, но в обратной последовательности, возвращает полупогружаемую платформу в исходное положение. После этого другими сигналами, подаваемыми с пульта диспетчера, вводят в действие ранее заблокированные на зимний период системы автоматического регулирования глубины осадки и крена полупогружаемой платформы, т.е. установку переводят на "летний" режим управления.
Режим стабилизации параметров электроэнергии при переменных скоростях ветра
Программа этого режима выполняется по известным алгоритмам для используемого в установке синхронного электрического генератора 46, выходная частота которого стабилизируется посредством статического преобразователя 69 частоты, включенного последовательно в цепь его якорной обмотки, а мощность - за счет регулирования тока возбуждения и шага лопастей 7 ветротурбины.
Режим защиты от штормовых и буревых ветров
Лопасти 7 ветротурбины, узлы 20, 21, 22, 28, 31, 49, 50 кинематики и электрический генератор 46 обеспечивают механическую прочность при максимальном расчетном значении рабочей скорости ветра, принимаемой равной 25-30 м/сек. Якорная система полупогружаемой платформы на прочность и сама платформа на остойчивость рассчитаны, исходя из буревых скоростей ветра согласно действующим нормам классификационных обществ, например, Регистра России для плавучих буровых установок, что составляет 50-60 м/сек. В диапазоне скоростей ветра от максимального рабочего значения до расчетного буревого значения ветротурбина надежно защищена от механических повреждений, а сама платформа от опрокидывания и от срыва с якорей.
В заявляемой установке предлагается двухступенчатая защита от штормовых и буревых ветров. Первая ступень защиты срабатывает при достижении первого ("штормового") значения уставки, равного максимальному рабочему значению скорости ветра, хранимого в памяти программного контроллера 79 и сравниваемого с текущими значениями скорости ветра, измеряемыми датчиком 84. Когда эти величины становятся равными, контроллер 79 разрешает выполнение известной программы защиты. По этой программе запускаются подпрограммы электрического и лопастного торможения ветротурбины. Электрическое торможение осуществляется за счет форсировки (см. фиг. 11) тока возбуждения генератора 46 до значения Iвфор с целью увеличения момента сопротивления на валу 20 ветротурбины, а торможение лопастями 7 производится посредством их перевода в положение с отрицательным углом атаки αтор за счет механизма 22 изменения шага. После снижения частоты вращения ветротурбины до "ползучей" по сигналу датчика частоты вращения ветротурбины (не показано) программный контроллер 79 через выход S посылает команду на гидросистему 123 поворотного корпуса 6, при получении которой гидромеханические тормоза 23 посредством элементов 24, 26 прижимают накладки 25 к диску 27 в тот момент, когда от датчика положения лопастей ветротурбины (не показано) приходит сигнал, подтверждающий положение ее вала 20, при котором длинная лопасть опущена вниз и направлена почти горизонтально, а короткая лопасть направлена вертикально вверх. После этого механизм 22 изменения шага устанавливает лопасти 7 ветротурбины в нейтральное (флюгерное) положение. По окончании выполнения описанных подпрограмм поворотный корпус 6 остается развернутым лопастями 7 навстречу ветру.
Вторая ступень защиты срабатывает при достижении скорости ветра до второго ("буревого") значения уставки. Она запускает дополнительную подпрограмму защиты, основанную на развороте поворотного корпуса 6 и ветротурбины на 180o, т.е. под ветер. В этом положении нижняя длинная лопасть попадает в зону ветрового затишья, образуемую за поворотным корпусом 6 и опорной башней 5, а верхняя короткая лопасть становится своим профилем во флюгерное положение, практически не создавая ветру никакого сопротивления. Кроме того, сам поворотный корпус 6 со стороны, противоположной ветротурбине, имеет более аэродинамические формы и тоже оказывает потоку ветра меньшее сопротивление. Вследствие этого величины кренящего момента, испытываемого платформой, и усилия, приложенные к якорным цепям, снижаются, уменьшая вероятность опрокидывания платформы и срыва ее с якорей.
Дополнительными условиями включения подпрограммы разворота на 180o являются сигналы, подтверждающие, что ветротурбина не вращается и что ее вал 20 застопорен в описанном выше положении. Первый подтверждающий сигнал приходит от датчика частоты вращения ветротурбины, а второй - от конечного выключателя, установленного на стопоре (не показаны). При выполнении этих условий программный контроллер 79 посылает в подсистему 73 управления исполнительным механизмом 51 поворота сигнал его включения, который приводит его в действие. После разворота поворотного корпуса 6 на 180o сигналы, вырабатываемые датчиками 74 направления ветра и 84 скорости ветра, изменяют свою полярность на обратную, сохранив свои значения на том же уровне, что и до начала поворота поворотного корпуса 6. После подтверждения этой информации командный сигнал разворота с подсистемы 73 снимается, вал двигателя-редуктора 51 затормаживается (не показано), и поворотный корпус ветротурбины находится в таком положении до тех пор, пока скорость ветра не снизится до рабочих значений. Одновременно с этим система регулирования глубины осадки, описанная выше, притапливает полупогружаемую платформу на наибольшую глубину, что также способствует сохранению ее остойчивости благодаря снижению статических кренящих моментов от действия ветровых нагрузок по причине уменьшения плеча действия внешних сил.
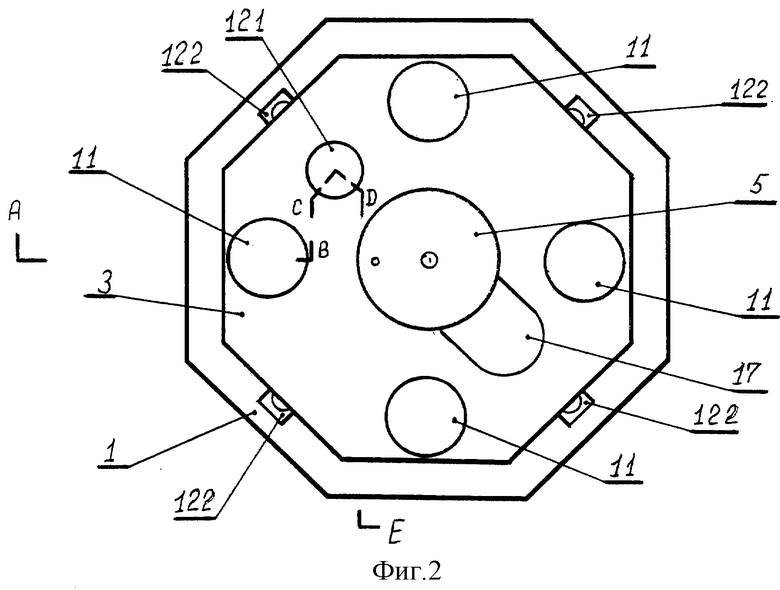
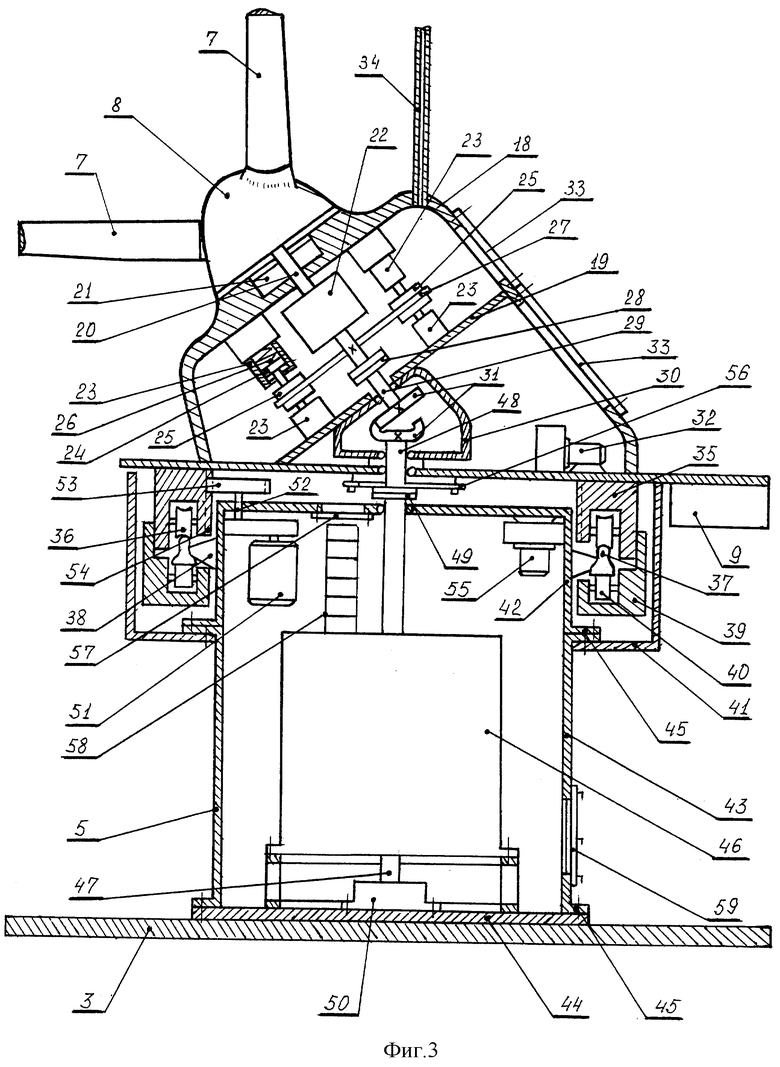
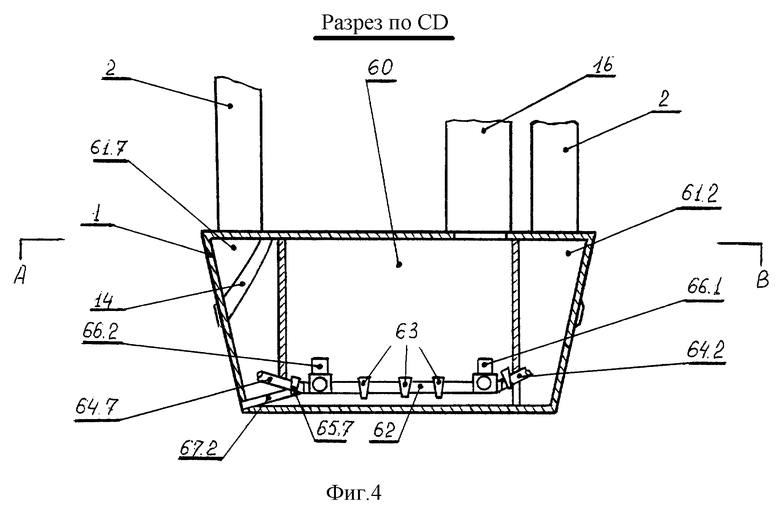
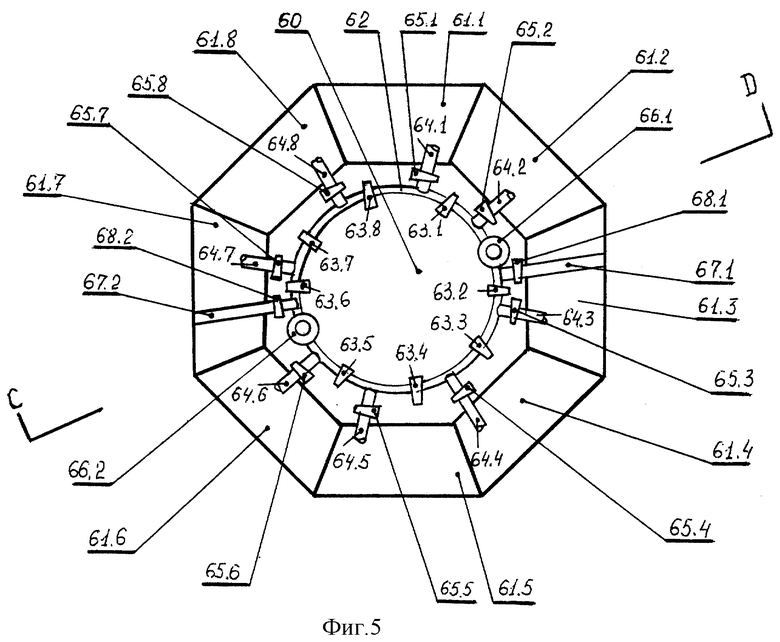
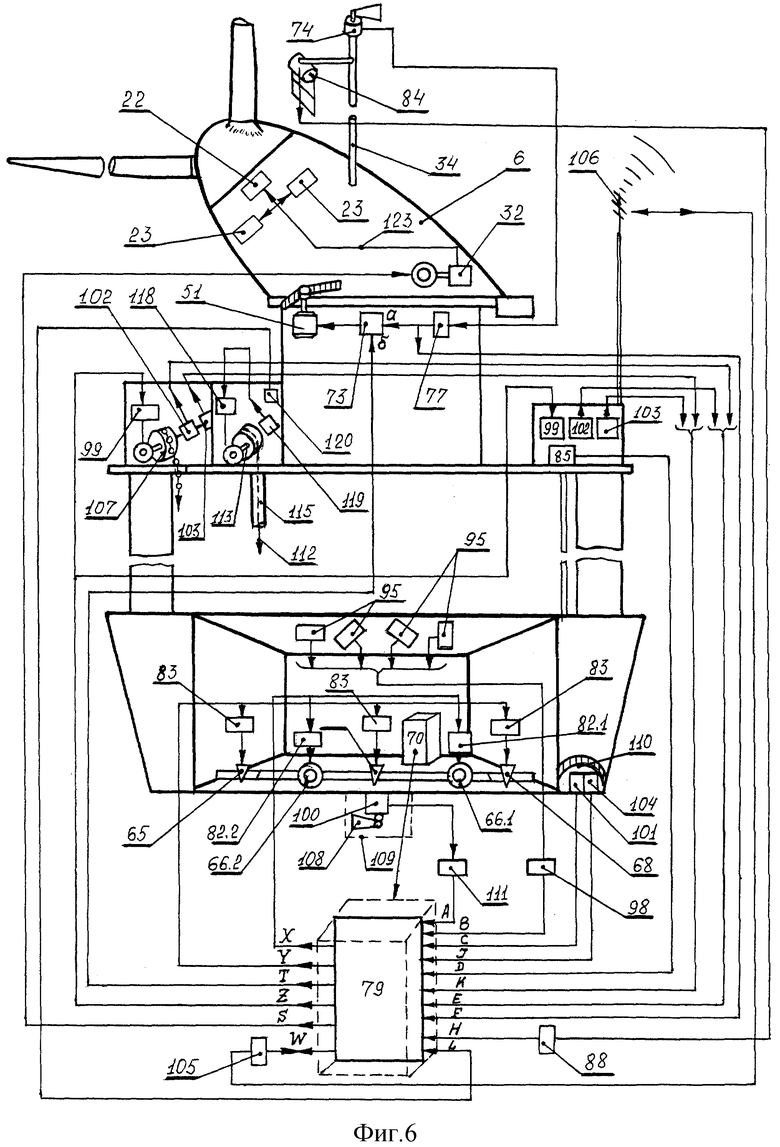
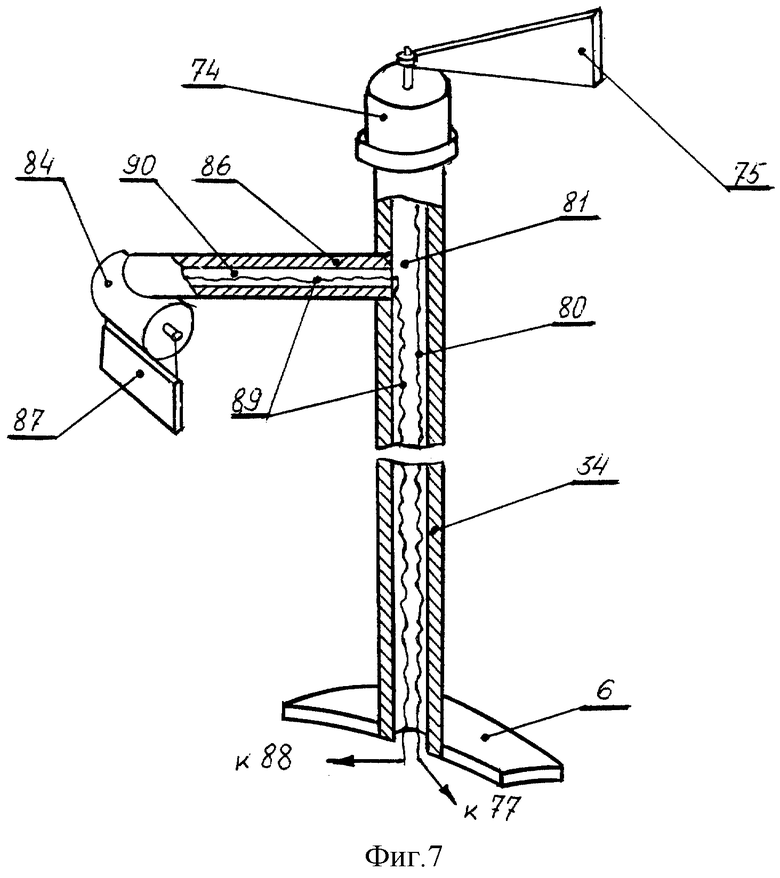
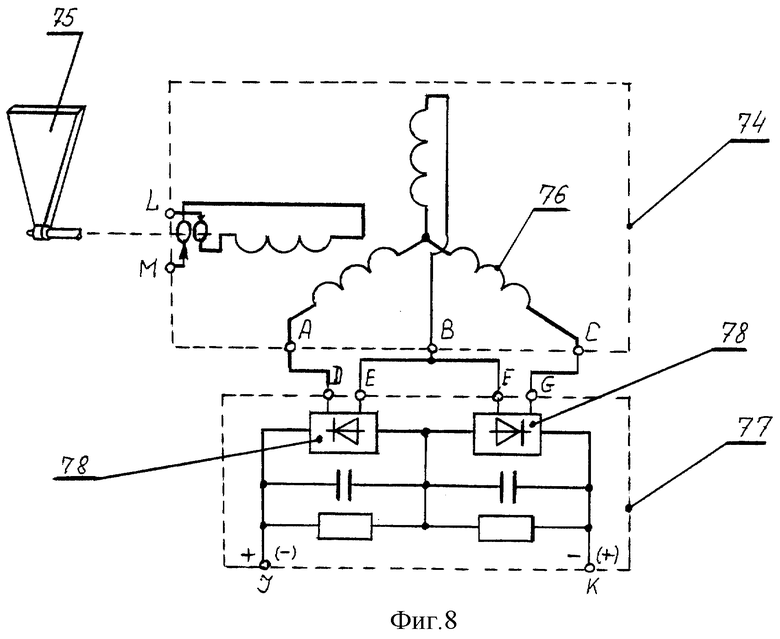
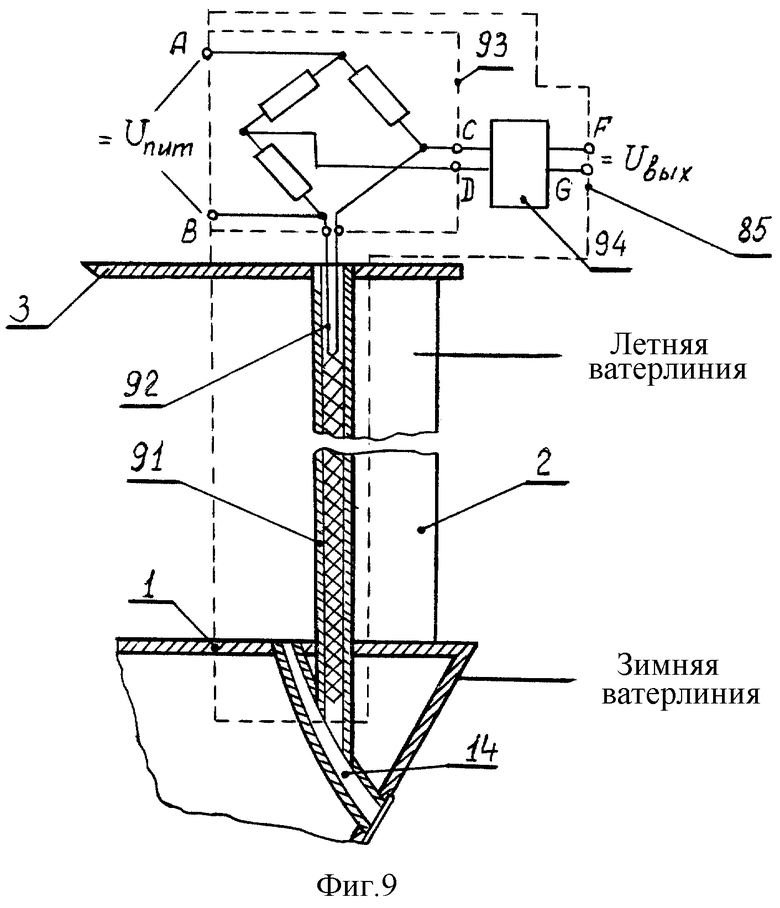
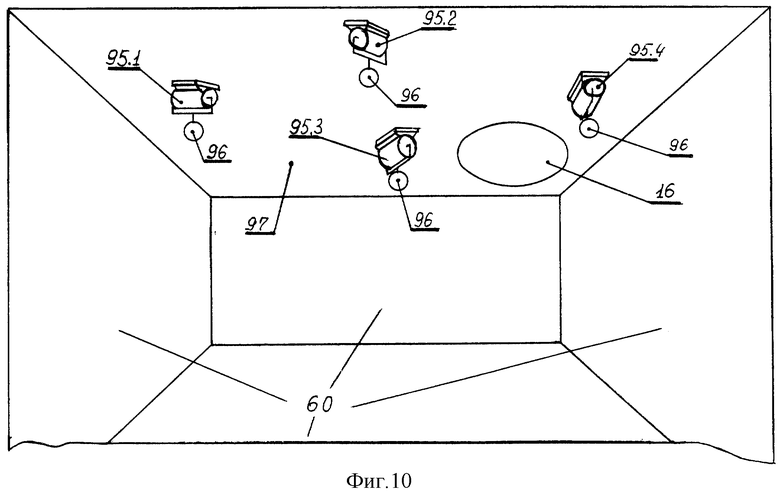
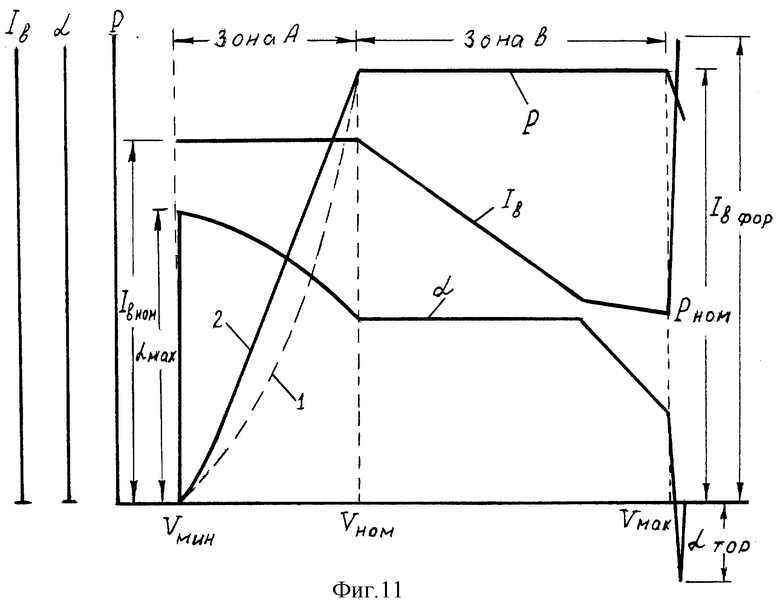
Изобретение относится к области энергетики, использующей нетрадиционные и возобновляемые источники энергии, в частности ветроэлектрические установки. На льдоустойчивый понтон посредством цилиндрических колонн опирается надводная площадка, на которой установлена опорная башня с вращающимся вокруг нее поворотным корпусом и ветротурбиной, снабженной лопастями одинаковой массы, но разной длины, описывающими конусную поверхность вокруг вала турбины, наклоненного к горизонту под углом 45°. При ветре вращение турбины передается через мультипликатор с конической зубчатой передачей электрическому генератору, размещенному в башне вертикально. Понтон разделен на один центральный и восемь периферийных отсеков и удерживается на месте стоянки якорными лебедками, якорями и якорь-цепями. Автоматическое регулирование шага лопастей выполняет датчик скорости ветра и механизм изменения шага. Защита от буревых ветров выполняется механическим тормозом. Автоматическое регулирование осадки и крена установки выполняет балластно-креновая система по сигналам датчиков скорости ветра, крена и глубины осадки установки. Достигается расширение области применения, повышение эффективности и надежности установки. 11 ил.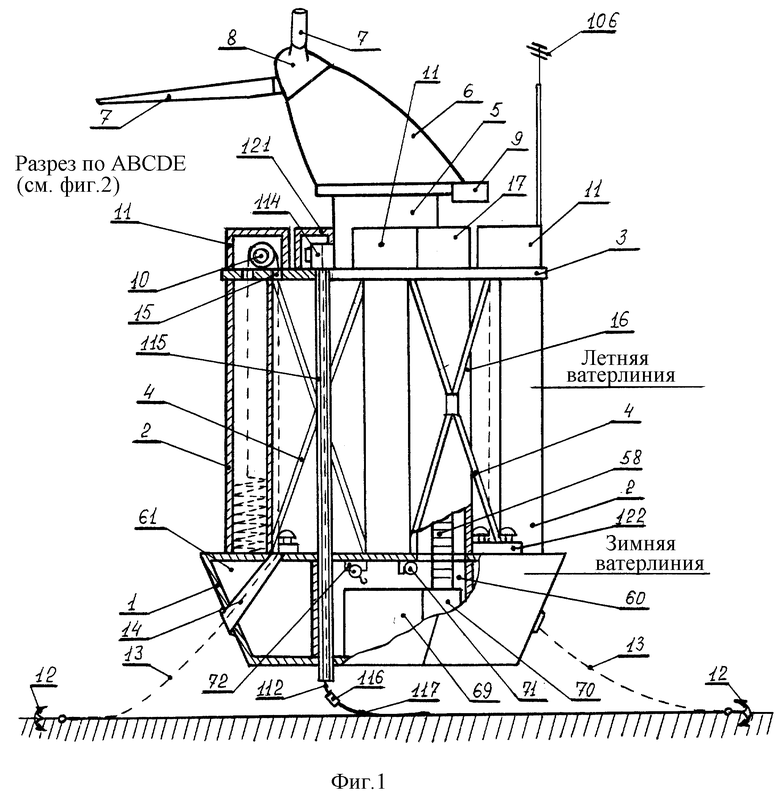
Плавучая ветроэлектрическая установка, содержащая плавучий корпус, несущий электрический генератор с его вспомогательным оборудованием и ветротурбину с кинематическими связями, вал которой наклонен к плоскости горизонта и снабжен двумя лопастями одинаковой массы, но разной длины; устройство автоматической ориентации ветротурбины по ветру с электрическим исполнительным механизмом и его подсистемой управления; якорную систему с электрическими якорными лебедками; систему защиты от буревых ветров, содержащую датчик частоты вращения ветротурбины, датчик положения лопастей и устройство электрического и механического торможения и последующего стопорения ветротурбины в положении, при котором длинная лопасть опущена вниз и направлена горизонтально, а короткая лопасть направлена вертикально вверх; и подводный силовой кабель, соединяющий электрический генератор с береговой энергосистемой, отличающаяся тем, что несущий корпус выполнен в виде полупогружаемой платформы, состоящей из понтона, имеющего форму опрокинутой вершиной вниз многогранной усеченной пирамиды, и расположенной над ним надводной площадки, соединенной с поверхностью понтона полыми цилиндрическими колоннами, скрепленными между собой балками жесткости; вал ветротурбины вместе с кинематическими связями со стороны ветротурбины размещен в усеченном яйцеобразном корпусе, который установлен с возможностью поворота на 360°C посредством исполнительного механизма поворота на цилиндрической опорной башне, которая закреплена на упомянутой надводной площадке, содержит вертикально расположенный электрический генератор с его системой принудительной вентиляции и имеет высоту, равную высоте электрического генератора; вал ветротурбины установлен под углом 40-50° к плоскости горизонта и соединен с вертикальным валом электрического генератора посредством мультипликатора, содержащего коническую зубчатую передачу; механизм поворота корпуса содержит двигатель-редуктор, снабженный электромагнитным тормозом и расположенный вертикально в опорной башне с выходом через ее крышу наружу оконечности выходного вала, а к днищу самого поворотного корпуса вблизи его наружного края снизу закреплено по окружности его опорное кольцо П-образного профиля, между выступами которого по всей окружности кольца равномерно встроены опорные колеса поворотного корпуса, сопряженные с рельсообразным ободом, закрепленным вокруг башни, причем выступающая оконечность вала двигателя-редуктора посредством зубчатой передачи находится в зацеплении с внутренним по отношению к оси башни выступом П-образного кольца, а ниже обода к внешнему выступу этого кольца по окружности закреплено дополнительное опорное кольцо поворотного корпуса L-образного профиля, между выступами которого по всей окружности этого кольца встроена дополнительная линия колес поворотного корпуса, сопряженных с нижней поверхностью рельсообразного обода, причем длинный выступ этого кольца внутренней боковой поверхностью закреплен на внешней боковой поверхности внешнего выступа П-образного кольца; подсистема управления устройства автоматической ориентации ветротурбины по ветру содержит управляющий и блокирующий входы, а само устройство автоматической ориентации дополнительно включает программный контроллер, датчик направления ветра, выполненный в виде сельсина, поворотный ротор которого кинематически связан с воздушным флюгером, а статор закреплен на вершине штанги, установленной вертикально на поворотном корпусе, и преобразователь угла поворота ротора сельсина в пропорциональное ему напряжение постоянного тока меняющейся полярности, состоящий из двух полупроводниковых выпрямителей, соединенных каждый электрически на стороне переменного тока с теми фазами трехфазной обмотки статора сельсина, в которых при синфазном положении его ротора и статора наведены равные по величине, но противоположные по знаку электродвижущие силы, а на стороне постоянного тока - встречно-последовательно с последующим параллельным соединением выхода преобразователя с одним из входов программного контроллера и с управляющим входом подсистемы управления исполнительным механизмом, блокирующий вход которой подключен к одному из выходов программного контроллера; электрические якорные лебедки якорной системы размещены каждая на надводной площадке над полой цилиндрической колонной в помещении цилиндрической формы, причем ненагруженная ветвь якорной цепи лебедки размещена в полости колонны, а нагруженная ветвь якорной цепи пропущена через отверстие в надводной площадке со стороны опорной башни и наклонный канал в корпусе понтона, нижнее отверстие которого расположено в средней по высоте части его борта-грани; понтон разделен на один центральный и равнообъемные, расположенные вокруг него, периферийные отсеки, количество которых равно числу бортов-граней понтона, сообщенные каждый посредством радиального периферийного трубопровода, снабженного электромагнитным запорным клинкетом, с общим кольцевым трубопроводом, разделенным посредством электромагнитных клинкетов на равные секторы, число которых соответствует числу бортов-граней понтона, и сообщенным посредством радиальных приемных и отливных диаметрально-симметрично расположенных трубопроводов, снабженных каждый электромагнитным клинкетом, с соответствующими забортными отверстиями понтона, причем на кольцевом трубопроводе в двух диаметрально противоположных точках установлено по одному высокопроизводительному балластно-креновому насосу, всасывающие и нагнетательные патрубки которых встроены последовательно в кольцевой трубопровод, а в самом центральном отсеке размещено вспомогательное оборудование электрического генератора и кольцевой трубопровод с балластно-креновыми насосами и клинкетами, и он имеет сообщение с надводной площадкой посредством цилиндрической шахты сообщения, снабженной входным тамбуром цилиндрической формы, расположенным на надводной площадке и примыкающим к опорной башне; установка дополнительно содержит следящую систему автоматического регулирования глубины осадки полупогружаемой платформы, включающую электрические исполнительные механизмы в виде электроприводов балластно-креновых насосов и электромагнитных клинкетов, их подсистемы управления, программный контроллер, датчик глубины осадки полупогружаемой платформы, телеметрический канал дистанционного управления и контроля, содержащий телевизионную антенну и приемно-передающее устройство, датчик скорости ветра, выполненный в виде сельсина, поворотный ротор которого кинематически связан со свободно провисающей пластиной, выполненной из легкого материала, а статор жестко закреплен на консоли, прикрепленной к штанге датчика направления ветра, и преобразователь угла поворота ротора сельсина, соединенный своим выходом с одним из входов программного контроллера, другие входы которого подключены к выходам датчика глубины осадки платформы и телеметрического канала дистанционного управления и контроля, а выходы - к входам подсистем управления балластно-креновыми насосами и электромагнитными клинкетами; следящую систему автоматического выравнивания крена полупогружаемой платформы, содержащую электрические исполнительные механизмы в виде балластно-креновых насосов и электромагнитных клинкетов, их подсистемы управления, программный контроллер, телеметрический канал дистанционного управления и контроля, датчики крена полупогружаемой платформы с преобразователями угла поворота сельсинов-датчиков, число которых равно половине числа бортов-граней понтона, выполненные каждый в виде массивного маятника, подвешенного свободно к валу ротора сельсина, который в накрененном положении полупогружаемой платформы на один из взаимно противоположных бортов-граней понтона отклонен соответственно в ту или другую сторону от синфазного положения ротора сельсина относительно его статора, корпус которого жестко закреплен на подволоке центрального отсека понтона, а трехфазная обмотка электрически соединена через преобразователь угла поворота сельсина с соответствующим входом программного контроллера, выходы которого подключены к входам телеметрического канала дистанционного управления и контроля и подсистем управления балластно-креновыми насосами и электромагнитными клинкетами, при этом сельсины-датчики крена закреплены на подволоке центрального отсека таким образом, что оси их роторов образуют друг с другом углы, установленные из соотношения 360° к числу бортов-граней понтона; следующую систему автоматического регулирования длин вытравленных якорных цепей, содержащую электрические исполнительные механизмы в виде электроприводов якорных лебедок, их подсистемы управления, программный контроллер, эхолот, датчики направления ветра и течения воды, датчики скоростей ветра и течения воды, датчики тяговых усилий на якорных цепях, датчики длин вытравленных якорь-цепей и телеметрический канал дистанционного управления и контроля, при этом входы программного контроллера соединены электрически с выходами указанных эхолота и датчиков, а выходы - с входами подсистем управления якорными лебедками и входом телеметрического канала; причем подводный силовой кабель соединен с электрическим генератором посредством промежуточного гибкого силового кабеля, проложенного со стороны днища понтона в вертикальной трубе, проходящей сквозь понтон до надводной площадки и через нее, а со стороны последней кабель уложен на барабане электрической лебедки, установленной на надводной площадке в закрытом помещении цилиндрической формы и снабженной системой автоматического регулирования натяжения промежуточного силового гибкого кабеля, содержащей исполнительный механизм в виде электропривода упомянутой кабельной лебедки, подсистему управления этим электроприводом, датчик тягового усилия на промежуточном силовом гибком кабеле, установленный на лебедке и связанный с ее барабаном, а электрически соединенный с входом подсистемы управления исполнительным механизмом, и датчик вытравленной длины промежуточного гибкого кабеля, установленный на валу кабельной лебедки и соединенный с входом программного контроллера, а система защиты от буревых ветров установки дополнительно содержит блок-программу разворота поворотного корпуса ветротурбины в подветренное положение, содержащую программный контроллер, связанный своими входами с датчиком скорости ветра, датчиком частоты вращения ветротурбины и датчиком положения ее лопастей, а выходами - с входом подсистемы управления исполнительным механизмом поворота ветротурбины, и блок-программу погружения полупогружаемой платформы на максимальную глубину осадки, содержащую упомянутую выше систему автоматического регулирования глубины осадки полупогружаемой платформы, а также датчик частоты вращения и положения лопастей ветротурбины, соединенные с входом программного контроллера этой системы.
| КОРОБКОВ В.А | |||
| Преобразователи энергии океана | |||
| - Л.: Судостроение, 1986, с | |||
| Счетная таблица | 1919 |
|
SU104A1 |
| АВТОВЕТРОЭЛЕКТРОСТАНЦИЯ СО СТУПЕНЧАТОЙ ЗАГРУЗКОЙ | 1991 |
|
RU2024783C1 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОТЕРАПИИ | 1992 |
|
RU2080885C1 |
| FR 2496773 A2, 25.06.1982. | |||

