ОБЛАСТЬ ТЕХНИКИ
Заявленное техническое решение относится к технической области определения местоположения в помещении, а в частности к способу определения местоположения пользователя внутри помещения с помощью инерциальных устройств измерения мобильного вычислительного устройства пользователя в реальном времени.
УРОВЕНЬ ТЕХНИКИ
С развитием широкого распространения информационных технологий в обществе количество онлайн-пользователей ежегодно удваивается, и появляется все больше и больше зон беспроводного доступа сети. Однако требования к покрытию беспроводным сигналом в помещениях, таких как высотные офисы, обычные жилые дома и крупные торговые центры с большим количеством пользователей, становятся все выше и выше.
Традиционная распределительная система для помещений использует метод «антенна + фидер», который имеет проблемы с наличием зон отсутствия сигнала, большим электромагнитным загрязнением и невозможностью скрытой установки. Характеристики излучающих кабелей, такие как равномерное покрытие, отсутствие мертвого угла сигнала и скрытая установка, привлекают все больше и больше внимания и все более широко используются. В то же время, с развитием урбанизации в жизни людей появляется все больше крупномасштабных коммерческих зданий и крупномасштабных хабов. Когда люди перемещаются внутри помещений, особенно когда люди входят в большие помещения, такие как супермаркеты, торговые центры, выставочные залы и подземные автостоянки, из-за больших площадей, сложной пространственной планировки и перекрестного распределения проходов и коридоров людям трудно быстро узнать свое местоположение и окружающие условия. Поэтому спрос людей на определение местоположения в закрытых помещениях становится все более актуальным.
Вместе с быстрым развитием технологии Интернета вещей и зрелостью аппаратных технологий технологии определения местоположения для помещений привлекли к себе внимание.
Обычные технологии определения местоположения для помещений включают определение местоположения по Wi-Fi, определение местоположения по радиочастотной идентификации (radio frequency identification (RFID)), сверхширокополосное определение местоположения, определение местоположения по Bluetooth, инфракрасное определение местоположения, ультразвуковое определение местоположения, технологию инерциальной навигации и т. д. Эти технологии определения местоположения реализуются по-разному, и каждая из них имеет свои преимущества и недостатки. В настоящее время система связи для помещений и система определения местоположения и навигации для помещений представляют собой две независимые сети, что значительно увеличивает сложность и нехватку места для проводки в помещении, а также стоимость строительства.
Такие навигационные технологии актуальны для: офисов; производственных площадок, заводов, цехов; торговых центров; складов; вокзалов; больниц; метро; аэропортов.
Из уровня техники известен патент на изобретение RU2685227C2, патентообладатель «МАЙКРОСОФТ ТЕКНОЛОДЖИ ЛАЙСЕНСИНГ», опубл. 17.04.2019.
В данном решении описываются способ и система определения местоположения внутри помещения с помощью сигналов Wi-Fi сетей. Известное решение заключается в повышении точности при выполнении определения местонахождения, используя зональную структуру. Область разбита на несколько зон, и одна или более модели распространения сигнала для одной или более беспроводных точек доступа (AP) сгенерированы для каждой зоны. Набор зональных моделей распространения сигнала обеспечивает улучшенную пригодность модели на основе каждой зоны. Процесс включает в себя прием запроса местоположения, ассоциированного с устройством беспроводной связи, выбор целевой зоны из нескольких доступных зон области и оценку местоположения устройства беспроводной связи на основании модели распространения сигнала, ассоциированной с целевой зоной, или основанного на сигнатуре определения местонахождения. Модель распространения сигнала, ассоциированная с целевой зоной, сгенерирована на основании обучающих образцов, наблюдаемых исключительно в целевой зоне.
Недостатками известного решения в данной области техники являются низкая точность и большая временная задержка в определении местоположения внутри здания.
Также из уровня техники известен американский патент US10917869B2, патентообладатель «LONPROX CORP», опубл. 09.02.2021.
В данном патенте описаны система и способ для определения местоположения мобильного устройства внутри помещения. В варианте осуществления системы может иметься по меньшей мере один узел позиционирования (PON), который имеет одну или несколько антенн. Каждый PON может быть расположен в определенном месте внутри помещения и сконфигурирован для передачи сигналов через одну или несколько антенн. Сигналы, передаваемые с антенн PON, могут быть синхронизированы по времени и частоте. Сервер, коммуникативно связанный с сетями PON и хранящий вспомогательную информацию, включая информацию о местоположении и сигнале, относящуюся к PON, может передавать вспомогательную информацию на мобильное устройство. Мобильное устройство может принимать сигналы от использования сетей PON и использовать вспомогательную информацию для определения трехмерного положения внутри помещения на основе односторонней разницы во времени прибытия сигналов.
Недостатком данного решения также является низкая точность и большая временная задержка в определении местоположения внутри здания.
Кроме того, из уровня техники известна международная заявка WO2016195527A1, патентообладатель ООО «НАВИГАЦИОННЫЕ РЕШЕНИЯ», опубл. 08.12.2016.
Данная заявка относится к способу и системе определения местоположения пользователя внутри помещения для его последующей навигации. Задачей, на решение которой направлено заявленное изобретение, является создание способа и системы для высокоточной навигации пользователя внутри помещения без наличия априорной информации о структуре здания и расположенных в нем излучателей радиосигнала, что обеспечивает быстрое ориентирование в незнакомом пространстве. Техническим результатом является повышение точности определения местоположения пользователя внутри помещения. В предпочтительном варианте осуществления заявленного изобретения, заявлен способ определения местоположения пользователя внутри помещения с помощью инерциального устройства измерения (IMU), крепящегося к ноге пользователя, и мобильного вычислительного устройства пользователя, заключающийся в получении информации от IMU о перемещении пользователя и передачи данной информации с помощью беспроводной связи на мобильное вычислительное устройство пользователя.
Недостатком данного решения является отсутствие выполнения адаптивного преобразования, что приводит к недостаточной точности определения местоположения объекта внутри помещения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В заявленном техническом решении предлагается новый подход к определению местоположения пользователя внутри помещения. В данном решении используется рекурсивный алгоритм, реализованный с использованием последовательного метода Монте-Карло, который обрабатывает полученные векторы ускорения, вращения и ориентации магнитного поля, а также мощности сигналов радиоизлучателей в результате чего получают уточненные координаты местоположения устройства (x, y), идентификатор этажа, угол поворота устройства в пространстве относительно вертикальной оси.
Таким образом, решается техническая проблема – создание способа для высокоточной навигации и отслеживания перемещений пользователей/объектов внутри помещения в реальном времени.
Техническим результатом, достигающимся при решении данной проблемы, является повышение точности определения местоположения пользователя внутри помещения.
Указанный технический результат достигается благодаря осуществлению способа определения местоположения пользователя внутри помещения с помощью инерциальных устройств измерения мобильного вычислительного устройства пользователя, содержащий этапы, на которых:
- загружают на мобильное вычислительное устройство цифровую карту помещения, содержащую планы этажей, содержащие расположенные на этажах помещения, их геометрию и радиоизлучатели, расположенные на этажах, при этом каждый этаж содержит идентификатор;
- определяют наличие сигналов радиоизлучателей внутри здания с помощью мобильного вычислительного устройства пользователя;
- измеряют мощности (RSSI - Received Signal Strength Indicator) сигналов радиоизлучателей;
- получают векторы ускорения, вращения мобильного вычислительного устройства пользователя и ориентации магнитного поля от инерциальных устройств измерения вычислительного устройства пользователя;
- обрабатывают полученные векторы ускорения, вращения и ориентации магнитного поля, а также мощности сигналов радиоизлучателей с помощью рекурсивного алгоритма, реализованного с использованием последовательного метода Монте-Карло, при этом рекурсивный алгоритм в цифровой карте помещения, накладывает естественные и искусственные ограничения на траекторию движения пользователя;
- получают по итогам обработки уточненные координаты местоположения устройства (x, y), идентификатор этажа, угол поворота устройства в пространстве относительно вертикальной оси;
- отображают местоположение пользователя на цифровой карте в интерфейсе вычислительного устройства.
В частном варианте реализации описываемого решения, радиоизлучатели представляют собой Wi-Fi и/или Bluetooth источники сигнала.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
Реализация изобретения будет описана в дальнейшем в соответствии с прилагаемым чертежом, который представлен для пояснения сути изобретения и никоим образом не ограничивает область изобретения. К заявке прилагается следующий чертеж:
Фиг. 1 иллюстрирует блок-схему выполнения заявленного способа.
Фиг. 2 иллюстрирует блок-схему алгоритма позиционирования.
Фиг. 3 иллюстрирует блок-схему алгоритма выбора этажа.
Фиг. 4 иллюстрирует блок-схему алгоритма много частичного фильтра.
ДЕТАЛЬНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
В приведенном ниже подробном описании реализации изобретения приведены многочисленные детали реализации, призванные обеспечить отчетливое понимание настоящего изобретения. Однако, квалифицированному в предметной области специалисту, будет очевидно каким образом можно использовать настоящее изобретение, как с данными деталями реализации, так и без них. В других случаях хорошо известные методы, процедуры и компоненты не были описаны подробно, чтобы не затруднять излишне понимание особенностей настоящего изобретения.
Кроме того, из приведенного изложения будет ясно, что изобретение не ограничивается приведенной реализацией. Многочисленные возможные модификации, изменения, вариации и замены, сохраняющие суть и форму настоящего изобретения, будут очевидными для квалифицированных в предметной области специалистов.
Заявленное техническое решение представляет собой специализированный аппаратно-программный комплекс для отслеживания пользователей/объектов и навигации внутри помещений на основе системы определения местоположения в реальном времени.
Ниже будут описаны понятия и термины, необходимые для понимания данного технического решения.
Радиоизлучатель - излучатель радиосигнала (точка-доступа WiFi, BLE-маяк, BEACON-маяк). Радиоизлучатель характеризуется следующими параметрами: x, y - координаты радиоизлучателя, отсчитываемые от левого верхнего угла карты; floorId - идентификатор этажа, на котором он расположен; A, B, deviation - параметры распространения сигнала (данные параметры подробно раскрыты ниже в логарифмической модели распространения сигнала).
Идентификатор радиоизлучателя - символьная последовательность, однозначно идентифицирующая радиоизлучатель. Для WiFi и BLE излучателей она является MAC-адресом, для BEACON-маяка - конкатенацией его uuid, major и minor. Пример идентификатора BEACON-маяка: 9BA60DA0-034E-47F0-9953-ED5F5ECC33EF, 25789, 12454.
Радиоизмерения - измерения сигналов, регистрируемые на устройстве, от радиоизлучателя. Радиоизмерения могут быть представлены в виде мощности принимаемого сигнала (RSSI - Received Signal Strength Indicator), измеряемой в децибел-милливаттах. Как правило, значения мощности сигнала изменяются в диапазоне от -100 dbm до 0 dbm.
Логарифмическая модель распространения сигнала.
Мощность принимаемого сигнала убывает при удалении от радиоизлучателя. При этом основной моделью распространения сигнала будем считать модель, согласно которой средняя мощность, регистрируемая на расстоянии r от излучателя, вычисляется по формуле:
 ,
,
где  - средняя мощность сигнала, регистрируемая на расстоянии 1 м;
- средняя мощность сигнала, регистрируемая на расстоянии 1 м;  - коэффициент затухания сигнала.
- коэффициент затухания сигнала.
Дисперсия мощности регистрируемого сигнала вычисляется по формуле:  где
где  - среднеквадратическое отклонение мощности сигнала от модельного значения.
- среднеквадратическое отклонение мощности сигнала от модельного значения.
Полезна будет и обратная формула, позволяющая оценить расстояние до радиоизлучателя по измеренной силе сигнала, полученной от него:
 .
.
Инерциальные измерения — измерения от трехосных акселерометра, магнитометра и гироскопа.
Цифровая карта помещения — карта, содержащая планы этажей, содержащие расположенные на этажах помещения, их геометрию и радиоизлучатели, расположенные на этажах, при этом каждый этаж содержит идентификатор, используемая для позиционирования устройства.
Система внутреннего позиционирования (Indoor-позиционирование) — процесс определения местоположения устройства внутри схемы помещений по регистрируемым сигналам радиоизлучателей и инерциальным измерениям. Для этого загружают на мобильное вычислительное устройство цифровую карту помещения и соотносят друг с другом регистрируемую силу сигналов от известных в цифровой карте излучателей.
Результатом работы indoor-позиционирования является:
• универсальный идентификатор этажа, на котором находится устройство;
• координаты устройства (x, y).
Коллекция этажей - индексированная коллекция, по которым ведется позиционирование.
Препроцессор измерений - фильтр передаваемых радио и инерциальных измерений, который отвечает за разделение непрерывного потока измерений на так называемые временные диапазоны позиционирования.
Многочастичный фильтр - последовательный метод Монте-Карло - рекурсивный алгоритм для численного решения проблем оценивания (фильтрации, сглаживания), особенно для нелинейных и не-гауссовских случаев.
Как показано на фиг. 1 заявленный способ определения местоположения пользователя внутри помещения с помощью инерциальных устройств измерения мобильного вычислительного устройства пользователя (100), состоит из следующих этапов.
На этапе (101) загружают на мобильное вычислительное устройство цифровую карту помещения, содержащую планы этажей, содержащие расположенные на этажах помещения, их геометрию и радиоизлучатели, расположенные на этажах, при этом каждый этаж содержит идентификатор
Далее на этапе (102) осуществляется определение наличия сигналов радиоизлучателей внутри здания с помощью мобильного вычислительного устройства пользователя. При этом, радиоизлучатели представляют собой Wi-Fi и/или Bluetooth источники сигнала.
На этапе (103) измеряют мощности (RSSI - Received Signal Strength Indicator) сигналов радиоизлучателей. После чего, на этапе (104) получают векторы ускорения, вращения мобильного вычислительного устройства пользователя и ориентации магнитного поля от инерциальных устройств измерения вычислительного устройства пользователя.
Обрабатывают полученные векторы ускорения, вращения и ориентации магнитного поля, а также мощности сигналов радиоизлучателей с помощью рекурсивного алгоритма, реализованного с использованием последовательного метода Монте-Карло на этапе (105). При этом, рекурсивный алгоритм в цифровой карте помещения, накладывает естественные и искусственные ограничения на траекторию движения пользователя.
Под естественными ограничениями понимаются такие ограничения как: стены, колонны и другие реальные объекты внутри помещений. Искусственными ограничениями являются так называемые «барьеры»: невидимые пользователю объекты цифровой карты в виде замкнутых полигонов, служащие зонами запрета позиционирования. К ним могут относится области за пределами здания.
На этапе (106) получают по итогам обработки уточненные координаты местоположения устройства (x, y), идентификатор этажа, угол поворота устройства в пространстве относительно вертикальной оси и отображают местоположение пользователя на цифровой карте в интерфейсе вычислительного устройства на этапе (107).
Кроме того, способ определения местоположения пользователя внутри помещения с помощью инерциальных устройств измерения мобильного вычислительного устройства пользователя включает в себя следующие алгоритмы:
Алгоритм выбора этажа (см. фиг. 3):
1. Для каждого этажа  цифровая карта помещения аккумулируем следующие параметры сигналов:
цифровая карта помещения аккумулируем следующие параметры сигналов:
• суммарное количество полученных измерений от радиоизлучателей с этажа за последние  сек;
сек;
• суммарное rssi полученных измерений от радиоизлучателей с этажа за последние сек;
• суммарный параметр A от радиоизлучателей, приславших сигнал с этажа за последние секунд.
2. На вход алгоритм в каждый момент времени получает поэтажный список видимых радиосигналов в текущем окне позиционирования. Для каждого этажа из списка добавляются значения в соответствующие аккумуляторы параметров из п.1.
3. Для каждого активного этажа осуществляется вычисление оценочной функции, характеризующей вероятность нахождения устройства на нем (значение оценочной функции для неактивных этажей не определено):
Предположим, что за последние секунд для этажа пришло  измерений от радиоизлучателей, расположенных на данном этаже. Обозначим эти измерения как
измерений от радиоизлучателей, расположенных на данном этаже. Обозначим эти измерения как
 ,
,
где  - радиоизлучатель, расположенный на этаже , от которого был зарегистрирован сигнал мощностью
- радиоизлучатель, расположенный на этаже , от которого был зарегистрирован сигнал мощностью  . Тогда оценочная функция для этажа будет иметь вид:
. Тогда оценочная функция для этажа будет иметь вид:
 ,
,
где ,  ,
,  в произвольный момент времени используются аккумуляторы параметров для соответствующего этажа.
в произвольный момент времени используются аккумуляторы параметров для соответствующего этажа.
4. Затем осуществляется ранжирование активных этажей в порядке убывания оценочной функции. На выход алгоритм возвращает полученный упорядоченный список активных этажей. Первый элемент списка станет в итоге этажом, который будет определен как текущий этаж расположения устройства.
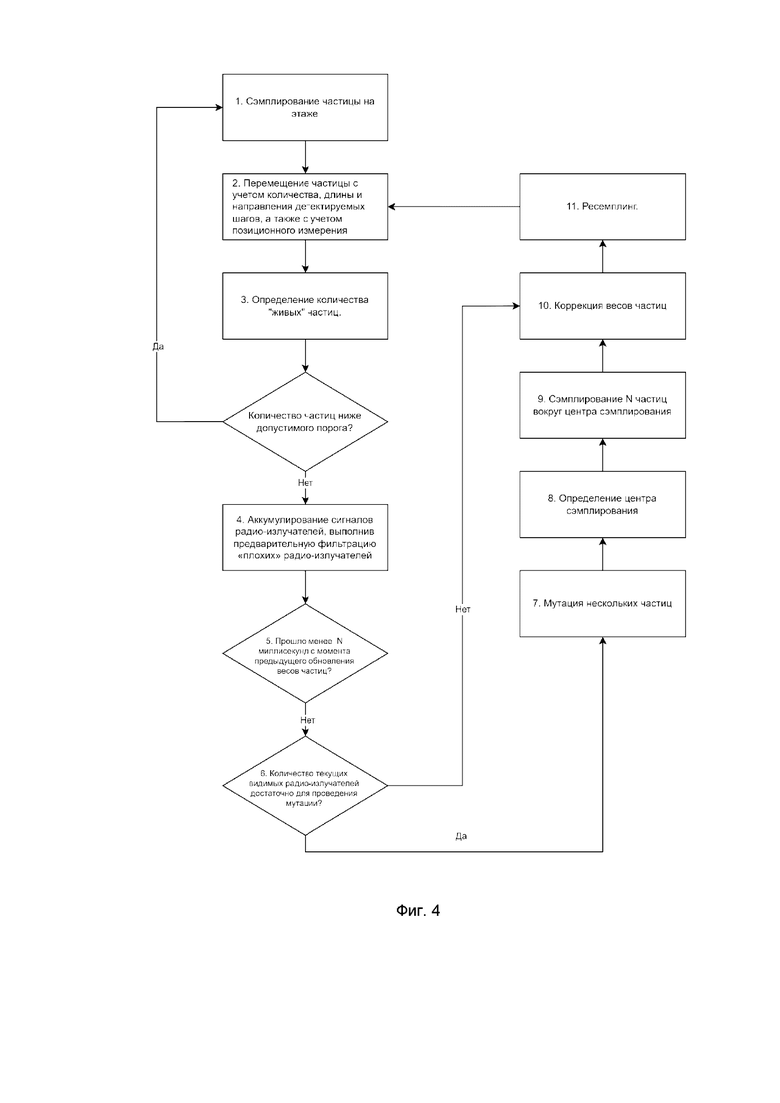
Алгоритм много частичного фильтра (см. фиг. 4):
Алгоритм использует систему частиц и их весовых коэффициентов. Каждая частица представляет собой вектор  , где:
, где:  - координаты частицы на этаже,
- координаты частицы на этаже,  - вес в диапазоне [0, 1],
- вес в диапазоне [0, 1],  - направление (азимутальный угол).
- направление (азимутальный угол).
Частица называется живой, если ее вес больше некоторого ε (текущее значение 1e-8) и мертвой в противном случае.
Количество частиц фиксировано и описывается константой (текущее значение равно 1000). Система частиц изменяется итеративно в соответствии со следующим алгоритмом:
1. Сэмплирование частицы на этаже, в случае необходимости.
Критерий сэмплирования - если с момента получения радиоизмерения прошло более  секунд (текущее значение 45), либо если сэмплирование еще не проводилось. Данный шаг заключается в том, что частицы разбрасываются случайным образом с условием, чтобы их координаты оставались в рамках геометрии этажа. Угол устанавливается случайным образом в диапазоне [-180, 180]. Вес всех частиц полагается равным
секунд (текущее значение 45), либо если сэмплирование еще не проводилось. Данный шаг заключается в том, что частицы разбрасываются случайным образом с условием, чтобы их координаты оставались в рамках геометрии этажа. Угол устанавливается случайным образом в диапазоне [-180, 180]. Вес всех частиц полагается равным  (в сумме он должен составлять 1.0).
(в сумме он должен составлять 1.0).
2. Переместить частицы с учетом количества, длины и направления детектируемых шагов, а также с учетом позиционного измерения.
На данном шаге изменяется только положение частиц и их угол. Если в результате какая-то частица выходит за геометрию этажа, то она остается на прежнем месте, а ее угол изменяется случайным образом в диапазоне [-180, 180].
Позиционное измерение (при его наличии) является центром притяжения частиц. Каждая частица сдвигается в направлении позиционного измерения пропорционально отношению радиусов indoor-решения и радиуса позиционного измерения. Предварительно, позиционное измерение должно быть спроецировано на геометрию этажа с тем, чтобы избежать (снизить вероятность) выхода частицы за геометрию этажа при подобном смещении.
3. Определить количество живых частиц. Если количество живых частиц снизилось ниже допустимого ограничения ( , текущее значение 100), то сэмплировать частицы на этаже заново (см. шаг 1).
, текущее значение 100), то сэмплировать частицы на этаже заново (см. шаг 1).
4. Аккумулируем сигналы радиоизлучателей, выполнив предварительную фильтрацию «плохих» радиоизлучателей.
Алгоритм фильтрации:
Вычислить для радиоизлучателя отношение  , где d - среднеквадратическое отклонение силы сигнала от модельного значения, а
, где d - среднеквадратическое отклонение силы сигнала от модельного значения, а  - коэффициент затухания сигнала для радиоизлучателя. Если отношение превышает допустимый порог
- коэффициент затухания сигнала для радиоизлучателя. Если отношение превышает допустимый порог  (текущее значение 1.5), то такой сигнал отбрасывается.
(текущее значение 1.5), то такой сигнал отбрасывается.
5. Если прошло менее  миллисекунд (текущее значение 1000) с момента предыдущего обновления весов частиц, то перейти к шагу 11. В противном случае, установить время обновления частиц на текущее и перейти к шагу 6.
миллисекунд (текущее значение 1000) с момента предыдущего обновления весов частиц, то перейти к шагу 11. В противном случае, установить время обновления частиц на текущее и перейти к шагу 6.
6. Если количество текущих видимых радиоизлучателей недостаточно для проведения мутации (константа  , текущее значение 3), то перейти к шагу 10.
, текущее значение 3), то перейти к шагу 10.
7. Выполнить мутацию нескольких частиц. Количество частиц для мутации задается константой  (текущее значение 50).
(текущее значение 50).
Алгоритм мутации можно описать следующим псевдокодом:
Повторять раз:
• выбрать случайную частицу;
• ее координаты и угол инициализируются заново, как при сэмплировании (см. шаг 1);
• вес инициализируется заново значением .
8. Определить центр сэмплирования. Центром сэмплирования является ближайший к местоположению радиоизлучатель в текущем окне позиционирования (расстояние до радиоизлучателей оценивается по логарифмической формуле распространения сигнала).
9. Сэмплировать  (текущее значение равно 10) частиц вокруг центра сэмплирования.
(текущее значение равно 10) частиц вокруг центра сэмплирования.
Алгоритм сэмплирования вокруг центра можно описать следующим псевдокодом:
• повторять раз:
• выбрать случайную частицу;
• - координаты инициализируется случайным образом по гауссовому распределению со средним в центре сэмплирования и дисперсией равной  текущее значение 5.0);
текущее значение 5.0);
• угол инициализируются случайным значением в диапазоне [-180, 180].
• вес инициализируется заново значением .
10. Коррекция весов частиц. На данном шаге выполняется переоценка весов частиц с использованием вектора радиосигналов из текущего окна позиционирования:
 ,
,
где  - сигнал в dBm от радиоизлучателя
- сигнал в dBm от радиоизлучателя  .
.
Алгоритм коррекции:
Для каждого индекса  вес каждой частицы умножается на функцию правдоподобия - вероятность того, что, находясь в данной точке устройство будет принимать сигнал от излучателя . Она рассчитывается по нормальному распределению следующим образом:
вес каждой частицы умножается на функцию правдоподобия - вероятность того, что, находясь в данной точке устройство будет принимать сигнал от излучателя . Она рассчитывается по нормальному распределению следующим образом:
 ,
,
где - модельный сигнал от излучателя , получаемый по логарифмической формуле распространения сигнала,  - среднеквадратическое отклонение силы сигнала от модельного значения, вычисленное для радиоизлучателя .
- среднеквадратическое отклонение силы сигнала от модельного значения, вычисленное для радиоизлучателя .
Веса всех частиц нормируются таким образом, чтобы в сумме они составляли 1.0.
11. Ресемплинг. После нескольких шагов процедуры коррекции веса частиц, соответствующие ошибочным гипотезам, могут стать близкими к нулю. Такие частицы не вносят вклад в финальную оценку положения устройства. Процедура ресемплинга позволяет перераспределить вычислительные ресурсы путем отбрасывания частиц, имеющих малый вес, и дублирования частиц, имеющих большой вес. Метод состоит из нескольких шагов:
• На первом шаге проверяется критерий ресэмплинга. Для этого вычисляется сумма квадратов весов всех частиц. Критерий ресэмплинга выполняется, если эта сумма больше, чем  (текущее значение
(текущее значение  = 600). Если критерий не выполняется, то ресэмплинг частиц на данной итерации не производится.
= 600). Если критерий не выполняется, то ресэмплинг частиц на данной итерации не производится.
• В случае, если критерий ресэмплинга выполняется, строится кумулятивная функция распределения на основе частиц и их весов. Для каждой частицы  , вычисляются частичные суммы:
, вычисляются частичные суммы:
 ,
,
таким образом, что 
• Затем генерируется равномерно распределенная случайная величина:  .
.
• На основе значения, которое приняла случайная величина, выбирается минимальный индекс  , такой что:
, такой что:  .
.
• Частица с индексом копируется в новый массив частиц. Данная процедура повторяется раз.
• В ходе применения процедуры ресэмплинга происходит удаление частиц с низкими весами и дублирование частиц с более высокими (пропорционально ее весу). По этой причине в конце ресэмплинга веса всех частиц выравниваются:  =.
=.
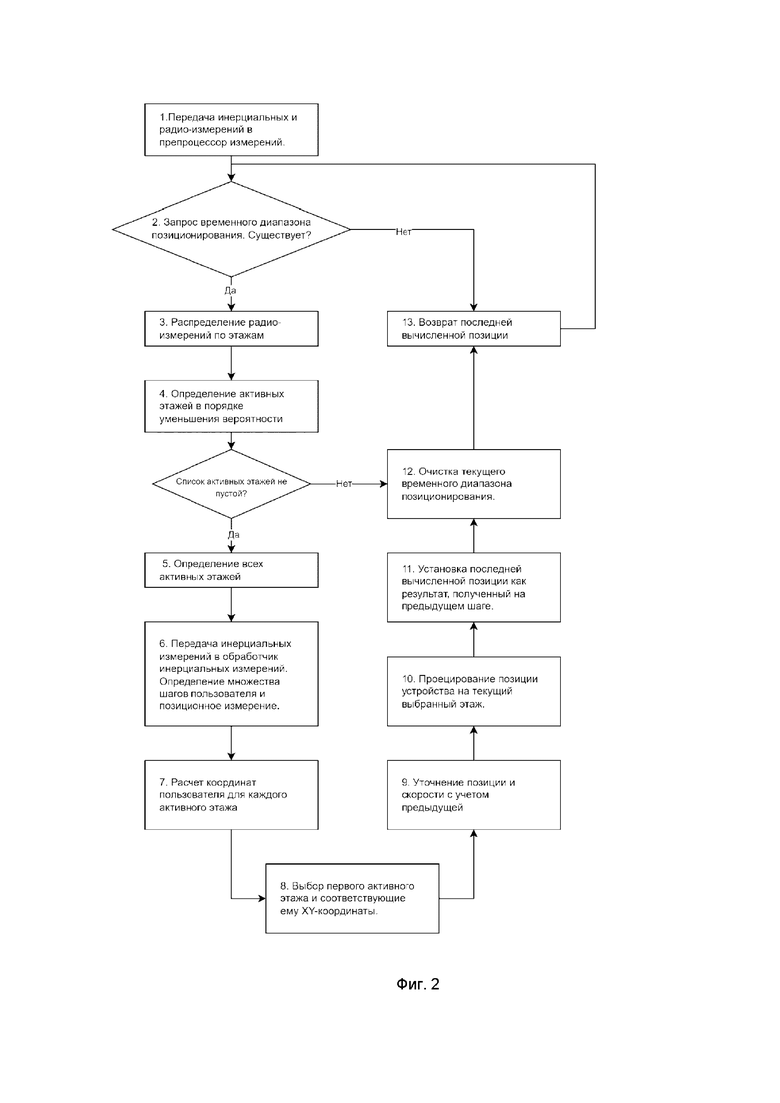
Ниже приведен алгоритм позиционирования (см. фиг. 2):
1. Передать инерциальные и радиоизмерения в препроцессор измерений.
2. Запросить очередной временной диапазон позиционирования у препроцессора измерений:
если есть временной диапазон позиционирования, то перейти к шагу 3;
иначе перейти к шагу 13.
3. Распределить все радиоизмерения текущего окна позиционирования по этажам.
4. По радиоизмерениям текущего окна позиционирования определить список активных этажей в порядке уменьшения вероятности (см. выше Алгоритм выбора этажа):
если список активных этажей не пустой, перейти к шагу 5;
иначе сбросить последнюю вычисленную позицию и перейти к шагу 12.
5. Определить все активные этажи в коллекции этажей. Таким образом мы препятствуем тому, чтобы активные этажи были вытеснены из кэша в случае его переполнения.
6. Передать инерциальные измерения в текущем окне позиционирования в обработчик инерциальных измерений. Определить множество шагов пользователя и позиционное измерение (при его наличии).
7. Для каждого активного этажа выбрать соответствующий этому этажу многочастичный фильтр и определить возможную позицию устройства на этом этаже, передав в многочастичный фильтр информацию об этаже, набор радиоизмерений, соответствующих данному этажу, множество сделанных пользователем шагов и корректирующее позиционное измерение (см. выше Алгоритм многочастичного фильтра).
8. Выбрать первый активный этаж L, полученный на шаге 4 (наиболее вероятный этаж нахождения устройства), и взять xy-координаты устройства на этом этаже (вычисленные соответствующим многочастичным фильтром на предыдущем шаге).
9. Уточнить позицию устройства с учетом предыдущей позиции и скорости.
10. Найти проекцию позиции устройства на текущий выбранный этаж (ближайшую к найденной позиции точку геометрии этажа).
11. Установить последнюю вычисленную позицию как результат, полученный на предыдущем шаге.
12. Удалить текущий временной диапазон позиционирования.
13. Вернуть последнюю вычисленную позицию. Перейти к шагу 2.
Заявленное техническое решение обеспечивает новую возможность в повышении точности определения местоположения пользователя внутри помещения.
В настоящих материалах заявки было представлено предпочтительное раскрытие осуществление заявленного технического решения, которое не должно использоваться как ограничивающее иные, частные воплощения его реализации, которые не выходят за рамки испрашиваемого объема правовой охраны и являются очевидными для специалистов в соответствующей области техники.


Изобретение относится к способу определения местоположения пользователя внутри помещения с помощью инерциальных устройств измерения мобильного вычислительного устройства (МВУ) в реальном времени. Предлагаемый способ содержит следующие этапы: загружают на МВУ цифровую карту помещения с указанием расположенных радиоизлучателей на этажах, которые содержат идентификатор этажа; определяют наличие сигналов радиоизлучателей внутри здания с помощью МВУ пользователя; измеряют мощности RSSI сигналов; получают векторы ускорения, вращения МВУ пользователя и ориентации магнитного поля от инерциальных устройств измерения вычислительного устройства; обрабатывают полученные векторы ускорения, вращения и ориентации магнитного поля, мощности сигналов; получают уточненные координаты местоположения устройства (x, y), идентификатор этажа, угол поворота устройства в пространстве относительно вертикальной оси; отображают местоположение пользователя на цифровой карте в интерфейсе МВУ. Техническим результатом заявленного решения является повышение точности определения местоположения пользователя внутри помещения. 1 з.п. ф-лы, 4 ил.
1. Способ определения местоположения пользователя внутри помещения с помощью инерциальных устройств измерения мобильного вычислительного устройства пользователя, содержащий этапы, на которых:
- загружают на мобильное вычислительное устройство цифровую карту помещения, содержащую планы этажей, содержащие расположенные на этажах помещения, их геометрию и радиоизлучатели, расположенные на этажах, при этом каждый этаж содержит идентификатор;
- определяют наличие сигналов радиоизлучателей внутри здания с помощью мобильного вычислительного устройства пользователя;
- измеряют мощности RSSI (Received Signal Strength Indicator) сигналов радиоизлучателей;
- получают векторы ускорения, вращения мобильного вычислительного устройства пользователя и ориентации магнитного поля от инерциальных устройств измерения вычислительного устройства пользователя;
- обрабатывают полученные векторы ускорения, вращения и ориентации магнитного поля, а также мощности сигналов радиоизлучателей с помощью рекурсивного алгоритма, реализованного с использованием последовательного метода Монте-Карло, при этом рекурсивный алгоритм в цифровой карте помещения, накладывает естественные и искусственные ограничения на траекторию движения пользователя;
- получают по итогам обработки уточненные координаты местоположения устройства (x, y), идентификатор этажа, угол поворота устройства в пространстве относительно вертикальной оси;
- отображают местоположение пользователя на цифровой карте в интерфейсе вычислительного устройства.
2. Способ по п. 1, характеризующийся тем, что радиоизлучатели представляют собой Wi-Fi и/или Bluetooth источники сигнала.
| US 0010917869 B2, 09.02.2021 | |||
| WO 2016195527 A1, 08.12.2016 | |||
| Радиоканальный комплекс для дистанционного контроля состояния здоровья и рабочей активности сотрудников промышленных и транспортных предприятий | 2020 |
|
RU2739126C1 |
| ОПРЕДЕЛЕНИЕ МЕСТОНАХОЖДЕНИЯ БЕСПРОВОДНОГО УСТРОЙСТВА ОБОРУДОВАНИЯ ПОЛЬЗОВАТЕЛЯ В ЦЕЛЕВОЙ ЗОНЕ | 2015 |
|
RU2685227C2 |
| US 20130207840 A1, 15.08.2013. | |||
