[0001] Информация определения местонахождения все больше и больше используется для разнообразных основанных на местоположении услуг (например, навигации, мобильной коммерции, и т.д.). Эти основанные на местоположении услуги используют информацию, имеющую отношение к местоположению мобильного устройства, для обеспечения множества вычислительных приложений. Часто, местоположение мобильного устройства может быть получено посредством использования существующей системы глобального позиционирования (GPS) (т.е., спутников GPS) благодаря тому факту, что большая часть мобильных устройств оборудована приемниками GPS.
[0002] Тем не менее, в некоторых средах (например, в средах внутри помещения), сигналы GPS недоступны. Здания и подобные объекты, которые препятствуют сигналам GPS, часто приводят к недоступности сигналов GPS, используемых для определения местонахождения. Это привело к исследовательским работам в отношении определения местонахождения для мобильных устройств, используя другие, не-GPS подходы. По меньшей мере, один подход состоит в использовании существующей инфраструктуры точек доступа WiFi для обеспечения определения местонахождения основанного на доступных радиочастотных (RF) сигналах вместо недоступных сигналов GPS. Инфраструктура WiFi является широко развернутой инфраструктурой и, вследствие этого, пригодной для определения местонахождения благодаря свойствам сохранения местонахождения сигналов WiFi.
[0003] Существует в целом две методики, используемые для основанного на WiFi определения местонахождения: (1) основанное на сигнатуре определение местонахождения, и (2) основанное на модели определение местонахождения. Основанное на сигнатуре определение местонахождения делает вывод о местоположении устройства посредством сравнения наблюдаемого образца WiFi с базой данных местоположения, которая содержит некоторое количество собранных образцов WiFi и их ассоциированные позиции. Образец(цы) WiFI, который наилучшим образом совпадает с запросом сигнала, используется для определения местонахождения. Тем не менее, основанное на сигнатуре определение местонахождения требует обширных и затратных усилий перед развертыванием, чтобы построить базу данных местоположения с достаточным количеством обучающих образцов для точного определения местонахождения.
[0004] Основанное на модели определение местонахождения, с другой стороны, не слишком сильно полагается на плотность обучающих образцов. Соответственно, количество обучающих образцов, используемых для основанного на модели определения местонахождения может быть значительно сокращено в сравнении с основанными на сигнатуре способами определения местонахождения, что приводит к много более недорогой системе. Основанное на модели определение местонахождения работает посредством использования модели распространения сигнала (например, модели потерь в тракте передачи как логарифмической функции расстояния (LDPL)) для сигнала WiFi, чтобы получить параметры модели точек доступа (AP) WiFi для предсказания силы принятого сигнала (RSS) в разнообразных местоположениях внутри области. Затем, запрос местоположения вместе с некоторыми наблюдениями WiFi может быть разрешен местоположением, которое наилучшим образом подгоняет наблюдения WiFi к модели распространения сигнала.
[0005] Тогда как основанный на модели подход определения местонахождения значительно сокращает усилия перед развертыванием и ассоциированную стоимость системы в сравнении с основанным на сигнатуре определением местонахождения, существующие основанные на модели подходы используют единую («глобальную») модель для определения местонахождения внутри всей области (например, среды внутри помещения) для каждой AP. Глобальная модель потерь в тракте передачи использует единую константу потерь в тракте передачи, чтобы отражать предположение о том, что RSS должна уменьшаться единообразно с увеличением расстояния от заданной WiFi AP. Тем не менее, из-за комплексности многих сред (например, стены, кабинки, пешеходы, и т.д.), которая может вся оказывать влияние на распространение сигнала WiFi, данное предположение не является истинным для многих сред, приводя к неровной пригодности модели по разным суб-областям среды с комплексными свойствами. Другими словами, основанное на модели определение местонахождения, использующее глобальную модель распространения сигнала для всей области, является слишком упрощенной, приводя к неоптимальной эффективности основанных на модели систем определения местонахождения.
Сущность изобретения
[0006] В данном документе описываются методики и системы для выполнения основанного на беспроводных средствах определения местонахождения, основанного, по меньше мере, частично на зональной структуре. Область (т.е., поверхность или пространство) может быть разбита на несколько зон, и одна или более модели распространения сигнала могут быть сгенерированы для одной или более беспроводных точек доступа (AP) внутри каждой зоны. Результатом является набор зональных моделей распространения сигнала, которые обеспечивают улучшенную пригодность модели на основе каждой зоны, приводя к повышенной точности при выполнении определения местонахождения устройств беспроводной связи внутри области. Раскрываемые в данном документе варианты осуществления могут быть использованы в любой среде, содержащей существующую инфраструктуру беспроводной связи. Несмотря на то, что методики и системы, описываемые в данном документе, часто представляются в контексте среды внутри помещения, где, как правило, сигналы GPS недоступны, раскрываемые в данном документе варианты осуществления в равной степени применимы к средам вне помещения, где доступна инфраструктура беспроводной связи, несмотря на наличие доступных сигналов GPS. Таким образом, раскрываемые в данном документе методики и системы не ограничиваются определением местонахождения внутри помещения.
[0007] В некоторых вариантах осуществления, реализуемый компьютером процесс выполнения определения местонахождения для устройства беспроводной связи в неизвестном местоположении включает в себя прием запроса местоположения, ассоциированного с устройством беспроводной связи, выбор целевой зоны из нескольких доступных зон области, и оценку местоположения устройства беспроводной связи на основании, по меньшей мере, частично одного из следующего: модели распространения сигнала, ассоциированной с целевой зоной (т.е., зональной модели) или основанного на сигнатуре определения местонахождения.
[0008] В некоторых вариантах осуществления, система, выполненная с возможностью выполнения определения местонахождения основанного на зональной структуре, включает в себя один или более процессоры, и одну или более памяти со следующими компонентами: компонент зонального определения местонахождения, чтобы принимать запрос местоположения, ассоциированный с устройством беспроводной связи, и компонент выбора зоны, чтобы выбирать целевую зону из нескольких доступных зон области. Компонент зонального определения местонахождения может быть выполнен с возможностью оценки местоположения устройства беспроводной связи на основании, по меньшей мере, частично одного из следующего: модели распространения сигнала, ассоциированной с целевой зоной, или основанного на сигнатуре определения местонахождения.
[0009] Посредством использования зональной структуры, которая разбивает область на несколько зон для обеспечения зонального определения местонахождения, эффективность (т.е., точность определения местонахождения) может быть улучшена в силу достижения более хорошей пригодности модели для заданного запроса местоположения от устройства беспроводной связи. До тех пор, пока достаточные обучающие данные доступны для обеспечения генерирования действительных зональных моделей распространения сигнала для беспроводных AP, зональная структура будет улучшать основанное на модели определение местонахождения, используя любую заданную инфраструктуру беспроводной связи. В дополнение, более плотные обучающие данные будут дополнительно повышать эффективность раскрываемой зональной структуры, однако раскрываемые в данном документе варианты осуществления пригодны для высокоточного определения местонахождения даже при минимальных доступных обучающих данных.
[0010] Данная Сущность Изобретения предоставлена, чтобы представить выбор концепций в упрощенной форме, что дополнительно описывается ниже в Подробном Описании. Данная Сущность Изобретения как не предназначена для того, чтобы идентифицировать ключевые признаки или неотъемлемые признаки заявленного предмета изобретения, так и не предназначена для того, чтобы быть использованной для ограничения объема заявленного предмета изобретения.
Краткое описание чертежей
[0011] Подробное описание описывается со ссылкой на сопроводительные фигуры. На фигурах, крайняя левая цифра(ы) цифрового обозначения идентифицирует фигуру, на которой цифровое обозначение появляется впервые. Одинаковые цифровые обозначения на разных фигурах указывают сходные или идентичные элементы.
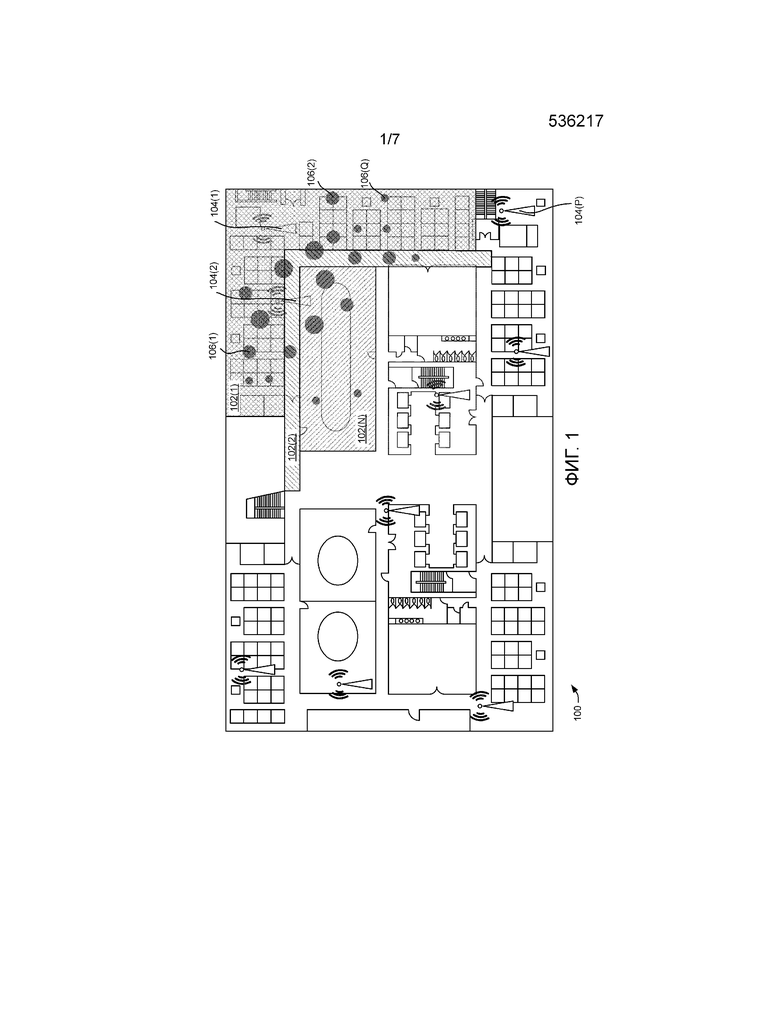
[0012] Фиг. 1 иллюстрирует примерную область, которая может быть разбита на несколько зон для использования с основанными на беспроводных средствах методиками определения местонахождения, используя зональные модели распространения сигнала.
[0013] Фиг. 2 иллюстрирует примерную архитектуру для выполнения основанного на беспроводных средствах определения местонахождения, используя зональную структуру, включающую в себя структурную схему, представляющую собой примерный сервер(ы) определения местонахождения.
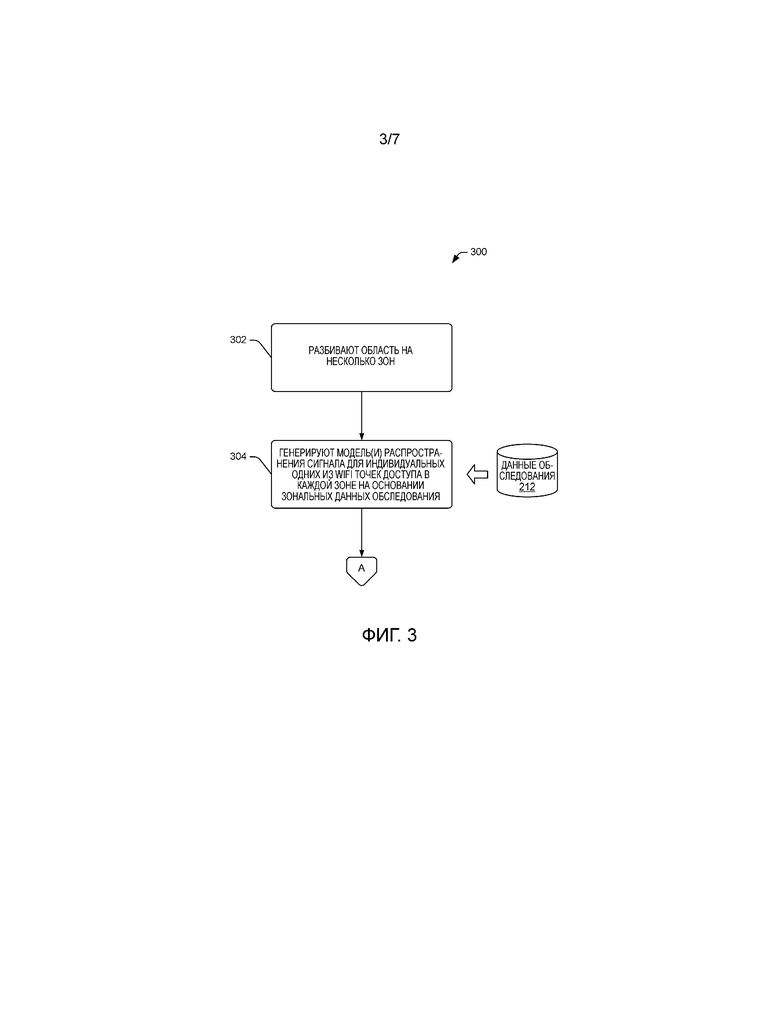
[0014] Фиг. 3 является блок-схемой иллюстративного процесса для обучения зональной модели.
[0015] Фиг. 4 является блок-схемой иллюстративного процесса для зонального определения местонахождения.
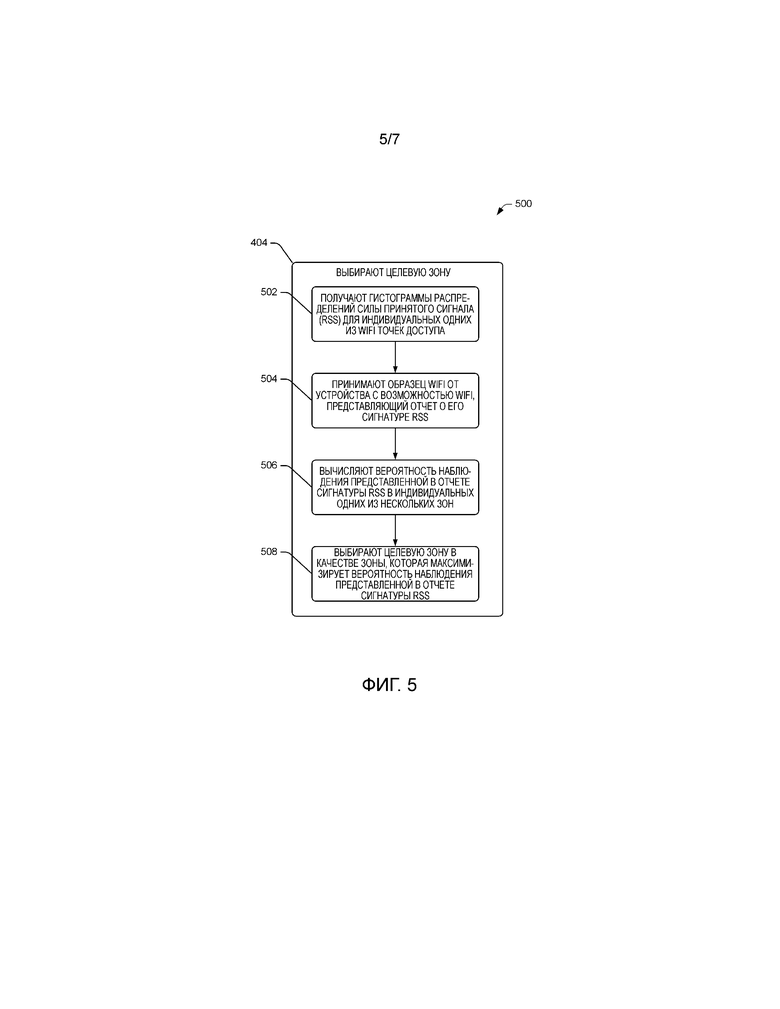
[0016] Фиг. 5 является блок-схемой иллюстративного процесса для выбора целевой зоны во время зонального определения местонахождения.
[0017] Фиг. 6 иллюстрирует примерную схему области, состоящей из нескольких этажей, как впрочем и блок-схему иллюстративного процесса для определения целевого этажа для зонального определения местонахождения.
[0018] Фиг. 7 является блок-схемой иллюстративного процесса для компенсации различия усиления устройств.
Подробное описание
[0019] Варианты осуществления настоящего раскрытия направлены, среди прочего, на методики и системы для выполнения основанного на беспроводных средствах определения местонахождения, используя зональную структуру. Методики и системы описываемые в данном документе могут быть реализованы некоторым количеством образов. Примерные реализации предоставлены ниже со ссылкой на нижеследующие фигуры.
Примерная область и разбиение на зоны
[0020] Фиг. 1 иллюстрирует примерную область 100, которая может быть разбита на несколько зон 102(1), 102(2),…, 120(N) для использования с основанными на беспроводных средствах методиками определения местонахождения, использующими зональные модели распространения сигнала. Фиг. 1 показывает область 100 в качестве двумерной (2D) области которая является представителем среды внутри помещения (например, офисного здания). Следует иметь в виду, что, тем не менее, эти области, как используемые в данном документе, не ограничиваются областями внутри помещения, поскольку области вне помещения при наличии инфраструктур беспроводной связи также могут извлекать пользу из раскрываемых методик и систем. Несмотря на то, что область 100 представлена в качестве 2D области, область 100 содержит трехмерное (3D) пространство, возможно содержащее несколько уровней (например, этажей), которые могут быть рассмотрены в качестве суб-частей области 100, которые должны быть разбиты на зоны. Любая 2D поверхность, включенная в область 100, может быть плоской или изогнутой, непрерывной или прерывистой, и любого размера и/или формы. Фиг. 1 показывает область 100 прямоугольной по форме; типично для многих сред внутри помещения.
[0021] Область 100 Фиг. 1 показана включающей «комплексные» свойства с точки зрения стен, дверей, кабинок, разбиений, стеклянных окон, и даже людей (в целом, именуемых в данном документе «объектами»), которые присутствуют в среде. В противоположность, полностью пустое пространство внутри помещения без каких-либо объектов, расположенных в нем, может считаться областью 100, которая простая и однородная, или по-другому не «комплексная».
[0022] Область 100 может дополнительно включать в себя множество беспроводных точек доступа 104(1), 104(2),…, 104(P) (AP) (например, WiFi AP), расположенных в разнообразных местоположениях по всей области 100. Беспроводные AP 104(1)-(P) (иногда именуемые «WiFi AP 104(1)-(P)» в данном документе) служат в качестве радиочастотных (RF) передатчиков, выполненных с возможностью соединения группы устройств беспроводной связи (например, мобильными телефонами, планшетами, и т.д.) с проводной локальной сетью (LAN). WiFi AP 104(1)-104(P) могут действовать в качестве сетевых концентраторов, выполненных с возможностью ретрансляции данных между соединенными устройствами беспроводной связи и соединенными проводными устройствами (например, концентратором или коммутатором Ethernet). Данная организация позволяет множеству устройств беспроводной связи использовать проводное соединение для связи с другими устройствами проводной и беспроводной связи.
[0023] В некоторых вариантах осуществления, WiFi AP 104(1)-(P) также могут включать в себя другие функциональности, такие как функциональность маршрутизатора, функциональность концентратора/коммутации, выступая в качестве самого коммутатора Ethernet. В других вариантах осуществления, WiFi AP 104(1)-(P) могут быть «тонкими» AP, которые лишь отправляют и принимают беспроводные данные. В целом, WiFi AP 104(1)-(P) обеспечивают связь через частоты, определенные стандартами IEEE 802.11, однако любой пригодный протокол беспроводной связи с доступной инфраструктурой может быть использован с раскрываемыми в данном документе методиками и системами. WiFi AP, которые основаны на стандартах IEEE 802.11, широко развернуты и, вследствие этого, рассматриваются для использования в качестве WiFi AP 104(1)-(P), показанных на Фиг. 1. Таким образом, WiFi AP является устройством приемопередатчика беспроводной связи (т.е., точкой доступа), которое предоставляет доступ к сети. Кроме того, устройства с возможностями WiFi относятся к устройствам беспроводной связи, которые используют связь беспроводной локальной сети (WLAN), чтобы осуществлять обмен данными с другими подобными устройствами и WiFi AP 104(1)-(P). Связь WLAN может быть осуществлена через частоты, определенные стандартами IEEE 802.11.
[0024] Фиг. 1 дополнительно иллюстрирует множество образцов 106(1), 106(2),…, 106(Q) беспроводной связи (иногда именуемых в данном документе «образцы 106(1)-(Q) WiFi»), которые наблюдаются на всем протяжении, по меньшей мере, части области 100. В частности, пользователи несущие устройства с возможностью WiFi (например, мобильные телефоны, планшеты, и т.д.) и расположенные на всем протяжении области 100 записывают измерения силы принятого сигнала (RSS), соответствующие одной из WiFi AP 104(1)-(P), в их видимости в этих разнообразных местоположениях. В некоторых вариантах осуществления, образцы 106(1)-(Q) WiFi представляют собой кортеж <местоположение, RSS> для каждой WiFi AP 104, который воспринимается устройством с возможностью WiFi, которое берет образец 106 WiFi. Размер каждого из образцов 106(1)-(Q) WiFi (показанных в качестве кружков разного размера на Фиг. 1) указывает на измерения RSS с точки зрения силы сигнала WiFi в этом местоположении. Т.е., чем больше кружок для каждого образца 106(1)-(Q) WiFi, показанного на Фиг. 1, тем больше измерение RSS. Соответственно, каждый из образцов 106(1), 106(2),…, 106(Q) WiFi является образцом беспроводной связи, который указывает силу сигнала беспроводной связи в конкретном местоположении.
[0025] Образцы 106(1)-(Q) WiFi, показанные на Фиг. 1, могут образовывать обучающие данные для основанного на модели определения местонахождения поскольку параметры модели для каждой WiFi AP 104(1)-(P) могут быть вычислены для модели распространения сигнала с потерей в тракте передачи (например, LDPL) из информации, которая предоставляется в отчете образцами 106(1)-(Q) WiFi. Несмотря на то, что варианты осуществления в данном документе преимущественно описываются со ссылкой на использование модели LDPL, прочие модели, такие как линейные модели, могут быть использованы в данном документе без изменения базовых характеристик системы. В целом, образцы 106(1)-(Q) WiFi могут быть предоставлены в отчете серверу определения местонахождения и использованы для обучения зональных моделей распространения сигнала, и выполнения определения местонахождения для устройств с возможностями WiFi, используя зональные модули.
[0026] Описываемые в данном документе методики и системы используют структуру, которая основана на нескольких зонах 102(1)-(N), на которые разбивается или делится область 100. Фиг. 1 показывает, что первая зона 102(1) охватывает суб-область области 100, которая содержит несколько кабинок, в то время, как вторая зона 102(2) охватывает другую суб-область, которая является коридором или пешеходной дорожкой/проходом для людей, чтобы пересекать область 100, а Nая зона 102(N) охватывает конференц-зал. Разбиение на зоны, показанное на Фиг. 1 является однако одним иллюстративным примером образа, которым область 100 может быть разбита на несколько зон 102(1)-(N), и следует иметь в виду, что разнообразные пригодные методики для разбиения области 100 на несколько зон 102(1)-(N) предполагаются, без изменения основных характеристик раскрываемой в настоящем документе системы. Примеры разнообразных методик разбиения на зоны будут рассмотрены более подробно ниже.
[0027] В соответствии с вариантами осуществления в данном документе, зональные модели распространения сигнала могут быть сгенерированы или построены для WiFi AP 104(1)-(P) на основании наблюдений с точки зрения зон 102(1)-(N). В целом, действительная зональная модель распространения сигнала может быть сгенерирована из порогового количества обучающих образцов, наблюдаемых внутри конкретной зоны 102. В некоторых вариантах осуществления, пороговое количество обучающих образцов, которые должны наблюдаться, является пятью обучающими образцами. Данное пороговое количество в виде пяти обучающих образцов первоначально основано на том факте, что главным образом присутствует четыре параметра модели LDPL, которые должны быть решены при построении соответствующей зональной модели распространения сигнала. Уравнение (1), ниже, показывает уравнение LDPL, которое может быть использовано для любой заданной зональной модели распространения сигнала:
 (1)
(1)
[0028] В уравнении (1), pij представляет собой измерение RSS (например, измеренное в децибел-милливаттах (дБм)), которая воспринимается устройством с возможностью WiFi в некотором неизвестном местоположении, j, которое является расстоянием от iой WiFi AP 104. Pi является RSS, измеренной в опорной точке (как правило на удалении 1 метр от AP) iой WiFi AP 104, γi является константой потерь в тракте передачи (т.е., степенью уменьшения RSS в окрестности iой WiFi AP 104). Dij является расстоянием от устройства с возможностью WiFi в местоположении, j, до iой WiFi AP 104, и R является произвольной константой, используемой, чтобы моделировать вариации RSS из-за эффекта многолучевого распространения. После сбора порогового количества (в случае Уравнения (1), пяти) образцов 106(1)-(Q) WiFi для каждой зоны 102(1)-(N), набор параметров для каждой WiFi AP 104(1)-(P) может быть вычислен посредством минимизации усредненной ошибки пригодности модели в соответствии с Уравнением (2), ниже:
 (2)
(2)
[0029] В Уравнении (2), k является количеством образцов 106(1)-(Q) WiFi, наблюдаемых в соответствующей зоне 102, для которой генерируется модель. Соответственно, может быть выполнено обучение применительно к одной или более зональным моделям для каждой WiFi AP 104(1)-(P) внутри области 100. Соответственно, любая заданная WiFi AP 104 может иметь несколько зональных моделей, так как устройства с возможностью WiFi могут воспринимать заданную WiFi AP 104 из разных зон нескольких зон 102(1)-(N). И наоборот, заданная WiFi AP 104 не может быть ассоциирована с любыми зональными моделями, если отсутствуют достаточные обучающие данные, доступные, чтобы построить действительную зональную модель.
[0030] В некоторых вариантах осуществления, запасная мера может быть предпринята посредством обучения глобальной модели для конкретных одних из WiFi AP 104(1)-(P) в области 100. Такая глобальная модель может быть использована для WiFi AP 104, которые не ассоциированы с зональной моделью распространения сигнала применительно к, по меньшей мере, одной зоне 102. Например, для заданной WiFi AP 104 внутри конкретной зоны 102, если количество образцов 106 WiFi внутри конкретной зоны 102 недостаточное (например, ниже порогового количества образцов, требуемого для действительной зональной модели), в то время как количество всех образцов 106 WiFi, принимая во внимание заданную WiFi AP 104, достаточное (например, равно или выше порогового значения) для действительной глобальной модели, может быть выполнено обучение глобальной модели для заданной WiFi AP 104 и ассоциировано с конкретной зоной 102. Соответственно, количество образцов 106 WiFi может быть достаточным для некоторых зон 102(1)-(N), все же недостаточным для других из зон 102(1)-(N). Например, если область 100 содержала десять образцов 106(1)-(Q) WiFi, при этом шесть из образцов 106(1)-(Q) WiFi внутри первой зоны 102(1), и четыре из образцов 106(1)-(Q) WiFi во второй зоне 102(2), первая зона может иметь зональную модель, сгенерированную для нее, если шести образцов 106 WiFi достаточно для генерирования зональной модели, в то время, как вторая зона 102(2) может возвращаться к использованию обученной глобальной модели, основанной на всех десяти образцах 106(1)-(Q) WiFi.
Примерная архитектура
[0031] Фиг. 2 иллюстрирует примерную архитектура 200 для выполнения основанного на беспроводных средствах определения местонахождения, используя зональную структуру. В архитектуре 200, один или более пользователи 202 ассоциированы с мобильными, вычислительными устройствами 204(1), 204(2) …, 204(N) беспроводной связи («устройства беспроводной связи» или «устройства с возможностью WiFi»), которые выполнены с возможностью помощи в обучении зональной (и глобальной) модели, и содействия определению местонахождения устройств 204(1)-(N) с возможностью WiFi. Для обеспечения обучения модели, устройства 204(1)-(N) с возможностью WiFi могут быть сконфигурированы, чтобы осуществлять сканирование WiFi AP, таких как WiFi AP 104(1)-(P), показанных на Фиг. 1, в их диапазоне, и чтобы принимать и записывать измерения RSS, соответствующие WiFi AP 104(1)-(P) в их видимости (т.е., в диапазоне) в разнообразных местоположениях на протяжении всей области, такой как область 100 на Фиг. 1. Устройства 201(1)-(N) с возможностью WiFi могут передавать образцы 206 WiFi, основанные на таких измерениях RSS, одному или более серверам 208(1), 208(2),…, 208(P) определения местонахождения через сеть(и) 210. Эти образцы 206 WiFi могут содержать наблюдения измерений RSS, используемых в качестве обучающих данных для обучения зональных и глобальных моделей распространения сигнала.
[0032] Тем не менее, чтобы способствовать процессу определения местонахождения, устройства 204(1)-(N) с возможностью WiFi могут быть подобным образом выполнены с возможностью передачи запросов местоположения в форме образцов 206 WiFi к серверу(ам) 208(1)-(P) определения местонахождения для того, чтобы разрешить вопрос в отношении текущей позиции или местоположения. При либо процессе обучения, либо процессе определения местонахождения, обнаружение и передача образцов 206 WiFi через сеть(и) 210 может быть реализовано в качестве модели с активным источником данных, где устройства 204(1)-(N) с возможностью WiFi периодически сканируют и осуществляют активную передачу информации серверу(ам) 208(1)-(P) определения местонахождения, или в качестве модели с пассивным источником данных, где сервер(ы) 208(1)-(P) определения местонахождения запрашивают сканирования.
[0033] Устройства 204(1)-(N) с возможностью WiFi могут быть реализованы в качестве любого количества вычислительных устройств, включая компьютер класса лэптоп, портативный цифровой помощник (PDA), мобильный телефон, планшетный компьютер, портативный мультимедийный проигрыватель, портативный игровой проигрыватель, интеллектуальные часы, и т.п. Каждое клиентское вычислительное устройство 204(1)-(N) оборудовано одним или более процессорами и памятью, чтобы хранить приложения и данные. В соответствии с некоторыми вариантами осуществления, приложение определения местонахождения хранится в памяти и исполняется на одном или более процессорах, чтобы предоставлять образцы 206 WiFi серверу(ам) 208(1)-(P) определения местонахождения и/или выполнять процесс определения местонахождения на устройствах 204(1)-(N) с возможностью WiFi, как например, когда обученные зональные (и глобальные) модели распространения сигнала могут быть загружены через сеть(и) 210 с сервера(ов) 208(1)-(P) определения местонахождения. Таким образом, обучение модели может быть выполнено на сервере(ах) 208(1)-(P) определения местонахождения, в то время как определение местонахождения может быть выполнено на устройствах 204(1)-(N) с возможностью WiFi. В качестве альтернативы, как обучение, так и определение местонахождения могут быть выполнены на сервере(ах) 208(1)-(P) определения местонахождения.
[0034] Несмотря на то, что сеть(и) 210 описывается в контексте основанной на web системы, могут быть использованы другие типы связи основанной на клиент/сервере и ассоциированная логика приложения. Сеть(и) 210 является представителем многих разных типов сетей, таких как кабельные сети, Интернет, локальные сети, мобильные телефонные сети, глобальные сети и беспроводные сети, или сочетание таких сетей.
[0035] Сервер(ы) 208(1)-(P) определения местонахождения может содержать один или более серверы, возможно организованные в качестве группы серверов или кластера серверов. Другие серверные архитектуры также могут быть использованы, чтобы реализовать сервер(ы) 208(1)-(P) определения местонахождения. В некоторых вариантах осуществления, сервер(ы) 208(1)-(P) определения местонахождения выполнены с возможностью обработки запросов, таких как запросы местоположения, от многих пользователей 202 и обслуживания, в ответ, разнообразной информации и данных, которые касаются определений позиции для устройств 204(1)-(N) с возможностью WiFi, позволяя пользователю 202 взаимодействовать с данными, предоставленными посредством сервера(ов) 208(1)-(P) определения местонахождения. Таким образом, сервер(ы) 208(1)-(P) определения местонахождения могут быть реализованы в качестве части любого сайта или услуги, обеспечивающей определение местонахождения для пользователей 202, ассоциированных с устройствами 204(1)-(N) с возможностью WiFi, включая основанные на местоположении услуги, навигационные услуги, услуги мобильной коммерции, и т.п.
[0036] В некоторых вариантах осуществления, образцы 206 WiFi принимаются посредством сервера(ов) 208(1)-(P) определения местонахождения и сохраняются в хранилище данных в качестве данных 212 обследования, как например во время фазы обучения для обучения или построения зональных (и глобальных) моделей распространения сигнала. Эти данные 212 обследования могут быть собраны в любом подходящем типе хранилища данных для хранения данных, включая, но не ограничиваясь, базу данных, файловую систему, распределенную файловую систему, или их сочетание. Данные 212 обследования могут быть выполнены с возможностью сбора любой пригодной информации, которая включается в образцы 206 WiFi, принятые через сеть(и) 210, такой как измерения RSS, информация идентификации и местоположения, которая относится к WiFi AP 104(1)-(P) в диапазоне, и подобному.
[0037] В целом, серверы 208(1)-(P) определения местонахождения оборудованы одним или более процессорами 214 и одной или более формами машиночитаемых носителей 216 информации. Серверы 208(1)-(P) определения местонахождения также могут включать в себя дополнительные устройства хранения данных (съемные и/или несъемные), такие как, например, магнитные диски, оптические диски, или ленту. Такое дополнительное хранилище может включать в себя съемное хранилище и/или несъемное хранилище. Машиночитаемые носители 216 информации могут включать в себя, по меньшей мере, два типа машиночитаемых носителей 216 информации, а именно компьютерные запоминающие носители информации и средства связи. Компьютерные запоминающие носители информации могут включать в себя энергозависимые и энергонезависимые, съемные, и несъемные носители информации реализованные любым способом или по любой технологии для хранения информации, такой как машиночитаемые инструкции, структуры данных, программные модули, или другие данные. Системная память, съемное хранилище и несъемное хранилище все являются примерами компьютерных запоминающих носителей информации. Компьютерные запоминающие носители информации включают в себя, но не ограничиваются, память с произвольным доступом (RAM), постоянную память (ROM), стираемую программируемую постоянную память (EEPROM), флэш-память или другую технологию памяти, постоянную память на компакт диске (CD-ROM), цифровые универсальные диски (DVD), или другое оптическое хранилище, магнитные кассеты, магнитную ленту, магнитное дисковое хранилище или другие магнитные запоминающие устройства, или любой другой носитель без передачи, который может быть использован, чтобы хранить требуемую информацию и доступ к которому может быть осуществлен посредством серверов 208(1)-(P) определения местонахождения. Любые такие компьютерные запоминающие носители информации могут быть частью серверов 208(1)-(P) определения местонахождения. Более того, машиночитаемые носители 216 информации могут включать в себя исполняемые компьютером инструкции, которые, когда исполняются процессором(ами) 214, выполняют разнообразные функции и/или операции, описываемые в данном документе.
[0038] В противоположность, средства связи могут воплощать машиночитаемые инструкции, структуры данных, программные модули, или прочие данные в модулированном сигнале данных, таком как несущая волна, или другом механизме передачи. Как определено в данном документе, компьютерные запоминающие носители информации не включают в себя средства связи.
[0039] Машиночитаемые носители 216 информации могут быть использованы, чтобы хранить любое количество функциональных, или исполняемых, компонентов, таких как программы и программные модули, которые являются исполняемыми на процессоре(ах) 214, для работы в качестве программного обеспечения. Компоненты включенные в машиночитаемые носители 216 информации могут служить, главным образом, для одной из двух целей, которые являются либо для разработки и обучения моделей распространения сигнала (помеченные «Обучение» на структурной схеме Фиг. 2), либо для выполнения определения местонахождения для устройств 204(1)-(N) с возможностью WiFi (помеченные «Определение местонахождения» на структурной схеме Фиг. 2).
Обучение
[0040] Главным компонентом, используемым для разработки и обучения зональных моделей распространения сигнала, в соответствии с раскрываемыми в данном документе вариантами осуществления, является компонент 218 обучения зональной модели, который выполнен с возможностью генерирования одной или более зональных моделей распространения сигнала для индивидуальных одних из WiFi AP 104(1)-(P). Компонент 218 обучения зональной модели может генерировать одну или более зональные модели распространения посредством решения в отношении параметров модели у модели потери в тракте передачи на основании наблюдений внутри конкретных одних из зон 102(1)-(N), полученных из данных 212 обследования.
[0041] В качестве части данного процесса обучения зональной модели, компонент 218 обучения зональной модели может включать в себя компонент 220 разбиения на зоны, который выполнен с возможностью деления или разбиения интересующей области 100 на несколько зон 102(1)-(N). Разбиение на зоны может быть выполнено разнообразными приемлемыми образами, используя разнообразные методики и алгоритмы.
[0042] В некоторых вариантах осуществления, область 100 может быть разбита на несколько зон посредством использования системы фрагментарной карты, которая использует, например, структуру дерева квадрантов по нескольким уровням детализации (т.е., уровням масштабирования), чтобы разбивать плоскую карту на фрагменты. Каждый фрагмент некоторой области может быть рассмотрен в качестве зоны области 100. В данном сценарии, зоны являются единообразными по размеру и форме на заданном уровне системы фрагментарной карты, поскольку разрешение карты является функцией уровня масштабирования. Одним иллюстративным примером системы фрагментарной карты является Bing® Maps Tile System предоставленная Microsoft® Corporation из Редмонда, штат Вашингтон. В такой системе фрагментарной карты, карта области может быть визуализирована на разных уровнях с квадратной суб-областью некоторой длины стороны, которая может быть измерена в измерениях реального расстояния (т.е., футах, метрах, и т.д.) на основании уровня масштабирования и широты, которая визуализируется. Каждый фрагмент известной длины стороны может затем быть назначен в качестве зоны. Идентификаторы каждого фрагмента могут быть использованы, чтобы идентифицировать каждую зону области 100. В примерной области 100, показанной на Фиг. 1, вся область 100 может быть представителем визуализированной карты системы фрагментарной карты с уровнем масштабирования, который относительно близок к поверхности земли.
[0043] В некоторых вариантах осуществления, компонент 220 разбиения на зоны может разбивать область 100 на несколько зон посредством использования базовых правил, которые указывают максимальный или минимальный размер геометрической формы, пригодной для области 100. Например, любая пригодная многоугольная форма максимального или минимального размера может быть использована, чтобы разбивать область 100 на несколько зон. В других вариантах осуществления, зоны могут быть разбиты, по меньшей мере, частично, используя ручной, или человеческий процесс.
[0044] В еще одних других вариантах осуществления, компонент 220 разбиения на зоны может разбивать область 100 на основании доступности обучающих данных внутри области 100. Например, компонент 220 разбиения на зоны может быть выполнен с возможностью определения суб-областей внутри области 100, которые содержат, по меньшей мере, пороговое количество (например, пять) наблюдаемых обучающих образцов, таких как образцы 206 WiFi, и может назначать каждую суб-область, которая отвечает пороговому критерию, в качестве отдельной зоны внутри области 100. В качестве другого примера, суб-область, которая определена как содержащая больше чем пороговое количество наблюдаемых обучающих образцов, может быть разделена пополам на меньшие суб-области, при условии, что эти результирующие суб-области содержат пороговое количество обучающих образцов. В качестве еще одного другого примера, компонент 220 разбиения на зоны может назначать «местоположения посева» (выбранные произвольно или используя правила, такое как «самая внутренняя» часть области 100 или по углам области 100) и может выращивать суб-области вокруг местоположений посева до тех пор, пока пороговое количество обучающих образцов содержится внутри суб-области, и они могут быть назначены в качестве зон области 100. Другие пригодные средства разбиения области 100 на несколько зон могут быть использованы, не отступая от базовых характеристик раскрываемой в данном документе системы.
[0045] В некоторых вариантах осуществления, компонент 220 разбиения на зоны может разбивать область на несколько зон, по меньшей мере, некоторые из которых являются перекрывающими друг друга. Использование перекрывающихся зон может уменьшать любые большие ошибки пригодности модели, наблюдаемые на границах зоны.
[0046] В некоторых вариантах осуществления, суб-области, которые не содержат никаких, или достаточно, обучающих данных могут быть расценены или назначены в качестве «пустых зон». Пустые зоны не могут быть ассоциированы с зональной моделью распространения сигнала, так как действительная зональная модель распространения сигнала может требовать пороговой величины обучающих образцов. Соответственно, разбиение на зоны может быть выполнено без учета доступности обучающих данных, и в этом случае, некоторые зоны могут оказываться пустыми зонами. В других вариантах осуществления, разбиение на зоны может зависеть от, или быть обусловленным, доступностью обучающих данных, так что только некоторые суб-области области 100 назначаются в качестве зон, тогда как оставшаяся часть(и) области 100 образует часть области, которая может быть рассмотрена в качестве «глобальной» зоны.
[0047] В определенных сценариях, части области 100 могут в большой степени пересекаться устройствами 204(1)-(N) с возможностью WiFi, чем другие, и эти суб-области годятся для меньших размеров зон на основании высокой плотности обучающих данных в этих суб-областях. Например, пешеходная дорожка, или подобные «общие области» внутри среды, могут иметь больше доступных обучающих данных, тогда как частные офисы или другие ограниченные местоположения могут не иметь совсем, или достаточно, обучающих данных для того, чтобы построить действительные зональные модели распространения сигнала. Соответственно, компонент 220 разбиения на зоны может быть выполнен с возможностью идентификации суб-областей области 100 в качестве суб-областей «высокого трафика» для более тонкого разбиения на зоны, что может приводить к большей точности определения местонахождения.
[0048] Машиночитаемые носители 216 информации могут дополнительно включать в себя компонент 222 обучения глобальной модели как части возможности обучения модели сервера(ов) 208(1)-(P) определения местонахождения. Компонент 222 обучения глобальной модели выполнен с возможностью обучения глобальной модели для заданной области 100 на основании всех наблюдений (т.е., образцов 206 WiFi) от всех WiFi AP 104(1)-(P) внутри области 100. Таким образом, глобальная модель может быть получена и использована для разнообразных запасных мер или расширения процесса определения местонахождения, чтобы разрешить вопрос о местоположении устройства 204 с возможностью WiFi с большей точностью.
[0049] Как компонент 218 обучения зональной модели, так и компонент 222 обучения глобальной модели могут отсылать устройства 204(1)-(N) с возможностью WiFi в область 100, включая в несколько зон 102(1)-(N), чтобы собирать данные 212 обследования (т.е., обучающие данные), используемые для обучения зональных и глобальных моделей. Дополнительно, или в качестве альтернативы, пользователи 202 с ассоциированными устройствами 204(1)-(N) с возможностью WiFi, которые уже находятся в области 100, могут быть использованы для приема образцов 206 WiFi в отношении данных 212 обследования. В любом случае, область 100 может быть разбита на несколько зон без учета обучающих образцов, или отосланные/существующие обучающие образцы могут фактически обуславливать разбиение области 100 на зоны. Для любой заданной WiFi AP 104 в зоне 102, при условии, что доступно достаточно обучающих данных, может быть установлена зональная модель для заданной WiFi AP 104. Соответственно, не все WiFi AP 104(1)-(P) будут иметь зональную модель распространения сигнала для каждой зоны. Любая WiFi AP 104 без зональной модели распространения сигнала в определенной зоне может использовать запасную глобальную модель для зоны без зональной модели распространения сигнала в целях определения местонахождения. Глобальная модель может быть разработана посредством компонента 222 обучения глобальной модели.
[0050] После обучения, компонент 218 обучения зональной модели может сохранять набор параметров модели (например, мощность передачи, P, коэффициент потери в тракте передачи, γ, и т.д.) для каждой WiFi AP 104(1)-(P). Эти наборы параметров модели могут быть сгенерированы на основании минимизации ошибки пригодности модели как описано выше. Таким образом, каждая зона из нескольких зон 102(1)-(N) может быть ассоциирована со множеством наборов параметров, при этом один набор параметров для каждой WiFi AP 104(1)-(P). Подобно, одна WiFi AP 104 может иметь разные наборы параметров модели для разных одних из нескольких зон 102(1)-(N).
[0051] В некоторых вариантах осуществления, зональные модели распространения сигнала могут быть оптимизированы посредством компонента 218 обучения зональной модели посредством включения определенной части обучающих данных из соседних зон. Т.е., при разработке зональной модели для заданной зоны, компонент 218 обучения зональной модели смотрит на доступные обучающие данные в зонах соседних (например, смежных) с заданной зоной для того, чтобы разработать действительную зональную модель распространения сигнала для заданной зоны. Данная методика включения обучающих данных из соседних зон может позволить пустым зонам получать действительные зональные модели при условии, что существует достаточно доступных обучающих данных от соседних зон.
Определение местонахождения
[0052] Основным компонентом, используемым для зонального определения местонахождения, в соответствии с вариантами осуществления раскрываемыми в данном документе, является компонент 224 зонального определения местонахождения, который выполнен с возможностью оценки местоположения заданного устройства 204 с возможностью WiFi на основании, по меньшей мере, частично одной из зональных моделей распространения сигнала, разработанной во время фазы обучения, или основанной на сигнатуре схеме определения местонахождения.
[0053] В качестве части данного процесса зонального определения местонахождения, компонент 224 зонального определения местонахождения может включать в себя компонент 226 выбора зоны, который выполнен с возможностью выбора целевой зоны из нескольких доступных зон области, такой как область 100 на Фиг. 1. Цель компонента 226 выбора зоны состоит в нахождении зоны, с наилучшим местонахождением для заданного запроса местоположения, принятого от устройства 204 с возможностью WiFi. Т.е., выбранная целевая зона должна быть зоной, в которой в настоящее время располагается запрашивающее устройство 204 с возможностью WiFi. Тем не менее, поскольку местоположение запрашивающего устройства 204 с возможностью WiFi неизвестно, разнообразные методологии и методики могут быть использованы, чтобы выполнить выбор зоны в целях определения местонахождения.
[0054] В целом, компонент 226 выбора зоны выполнен с возможностью выбора целевой зоны посредством обрезки, или иным образом игнорирования, маловероятных зон и подбора наилучшей зон(ы)-кандидата в качестве целевой зоны. Посредством обрезки, или игнорирования, маловероятных зон, компонент 226 выбора зоны может сокращать комплексность системы в отношении процесса выбора зоны без ущерба для точности определения местонахождения. В некоторых вариантах осуществления, данная обрезка или фильтрация могут быть реализованы, используя фильтр Блума, который быстро, и эффективно в отношении памяти, определяет, исключается ли зона из набора зон-кандидатов. В частности, фильтр Блума может быть создан для каждой зоны с помощью доступа к информации по всем из WiFi AP 104(1)-(P) в каждой зоне. Затем фильтр Блума может хэшировать все из WiFi AP 104(1)-(P), наблюдаемых в образце 206 WiFi со стороны устройства 204 с возможностью WiFi в каждой зоне, и сравнивать WiFi AP 104(1)-(P) в образце 206 WiFi с каждым перечислением зоны у WiFi AP 104(1)-(P). Если общий идентификатор для WiFi AP 104 найден для конкретной зоны на основании сравнения, соответствующие биты фильтра Блума зоны могут быть установлены равными 1, а зоны, которые не установлены равными 1 исключаются из набора зон-кандидатов. Компонент 226 выбора зоны затем может определять, отвечает ли или превышает ли количество общих WiFi AP 104(1)-(P) в зоне пороговое количество (например, четыре общие WiFi AP), и если нет, то эта зона может быть отфильтрована из набора кандидатов. Зоны в наборе кандидатов могут быть ранжированы на основании количества общих WiFi AP 104(1)-(P) к тем, которые представляются в отчете в образце 206 WiFi.
[0055] В некоторых вариантах осуществления, компонент 226 выбора зоны выбирает целевую зону из нескольких доступных зон 102(1)-(N), используя наивную байесовскую методику выбора зоны, которая задействует прием образца 206 WiFi от устройства 204 с возможностью WiFi, в котором образец 206 WiFi представляет отчет об измерении RSS от одной или более WiFi AP 104(1)-(P). На основании выбора, компонент 226 выбора зоны использует гистограммы одной или более WiFi AP 104(1)-(P), чтобы вычислять вероятность наблюдения принятого образца 206 WiFi в индивидуальных одних из нескольких доступных зон 102(1)-(N). Зона, которая максимизирует вероятность наблюдения образца 206 WiFi затем выбирается в качестве целевой зоны в целях определения местонахождения. Данный процесс выбора зоны может включать в себя обрезку или фильтрацию зон на основании сравнения WiFi AP 104(1)-(P) в области 100 с WiFi AP 104(1)-(P), которые представляются в отчете в образце 206 WiFi, чтобы получить набор зон-кандидатов с, по меньшей мере, одной общей WiFi AP 104 с WiFi AP 104(1)-(P), которые представляются в отчете в образце 206 WiFi. Таким образом, только гистограммы WiFi AP 104(1)-(P) внутри зон-кандидатов должны рассматриваться в процессе выбора зоны.
[0056] Следует иметь в виду, что для того, чтобы выполнить варианты осуществления, рассматриваемые в данном документе, все из WiFi AP 104(1)-(P) в зоне могут быть ассоциированы с гистограммой. Каждая гистограмма является распределением вероятности наблюдаемых измерений RSS в разнообразных местоположениях внутри зоны области 100. Соответственно, каждая зона ассоциируется с распределением вероятности для единственной WiFi AP 104. Как отмечено выше, гистограммы WiFi AP 104(1)-(P) могут быть использованы в целях выбора зоны. С другой стороны, для пустых зон гистограмма не требуется. Как отмечено выше, глобальная модель распространения сигнала может быть использована для таких пустых зон, и в некоторых вариантах осуществления, пустые зоны могут быть объединены в единую «зону», которая использует глобальную модель распространения сигнала в целях определения местонахождения.
[0057] В некоторых вариантах осуществления, компонент 226 выбора зоны выбирает целевую зону, используя подход «Наиболее Близкой Зоны» посредством получения оцененного местоположения устройства 204 с возможностью WiFi, используя глобальную модель распространения сигнала, ассоциированную со всей областью 100, и впоследствии выбирая целевую зону в качестве зоны с центром, который является наиболее близким к оцененному местоположению. Определение расстояния для определения наиболее близкого центра, может быть основано на евклидовом расстоянии, в соответствии с некоторыми вариантами осуществления.
[0058] В некоторых вариантах осуществления, компонент 226 выбора зоны выбирает целевую зону, используя подход «Минимальной Ошибки» посредством получения оцененного местоположения устройства 204 с возможностью WiFi, используя глобальную модель распространения сигнала, и выбирая подмножество наиболее близких зон из числа нескольких зон 102(1)-(N) на основании расстояния этих зон до оцененного местоположения. Затем зональные модели распространения сигнала, ассоциированные с этими наиболее близкими зонами могут быть использованы, чтобы выполнить соответствующие определения местонахождения для устройства 204 с возможностью WiFi, и целевая зона может быть выбрана в качестве зоны, которая минимизирует ошибку пригодности модели между образцом 206 WiFi и разными зональными моделями распространения сигнала.
[0059] В некоторых вариантах осуществления, компонент 26 выбора зоны может быть выполнен с возможностью получения набора зон-кандидатов, используя любую из методик, раскрытых выше, и выполнения определения местонахождения на основании зональных моделей распространения сигнала для каждой из зон в наборе зон-кандидатов. Затем финальное основанное на зональном подходе местоположение может быть взято в качестве среднего по местоположениям, полученным используя каждую зональную модель. В некоторых вариантах осуществления, может быть использовано среднее взвешенное, где весовой коэффициент является балом выбора зоны, возможно основанным на количестве общих WiFi AP 104(1)-(P), или других приемлемых методологиях подсчета баллов и ранжирования. Использование среднего по нескольким зональным определениям местонахождения из разных зон для разрешения вопроса в отношении финального местоположения помогает уменьшить влияние выбора «неправильной» зоны (т.е., зоны, в которой фактически не располагается запрашивающее устройство 204 с возможностью WiFi).
[0060] В некоторых вариантах осуществления, компонент 224 зонального определения местонахождения выполнен с возможностью определения схемы определения местонахождения между основанным на зональной модели подходом и основанным на сигнатуре подходом после того, как целевая зона выбирается посредством компонента выбора зоны. Выбор между использованием основанного на зональной модели подхода и основанного на сигнатуре подхода может зависеть от плотности и покрытия обучающих данных внутри выбранной целевой зоны. Какая бы схема не использовалась, компонент 224 зонального определения местонахождения разрешает вопрос в отношении местоположения устройства 204 с возможностью WiFi в соответствии с выбранной схемой.
[0061] Фиг. 2 дополнительно показывает, что машиночитаемые носители 216 информации могут дополнительно содержать компонент 228 глобальной модели определения местонахождения, который выполнен с возможностью использования глобальной модели распространения сигнала, чтобы выполнять определение местонахождения для запроса местоположения от устройства 204 с возможностью WiFi. Процесс определения местонахождения для глобальной модели точно такой же, как и для основанного на зональной модели определения местонахождения, за исключением того, что отсутствует выбор зоны включенный в процесс поскольку глобальная модель распространения сигнала основана на всей области 100 и всех WiFi AP 104(1)-(P). Компонент 228 глобальной модели определения местонахождения предоставляет либо одно из или как запасную возможность, так и расширенную возможность для экземпляров, где глобальная модель может улучшить точность определения местонахождения. Например, там где присутствуют пустые зоны и/или WiFi AP 104(1)-(P), для которых не может быть установлена действительная зональная модель, в целях определения местонахождения может быть использована глобальная модель распространения сигнала. Дополнительно, применительно к определенным зонам, глобальная модель распространения сигнала может фактически привести к лучшей эффективности. В данном случае, глобальная модель распространения сигнала может быть рассмотрена в качестве постоянного кандидата для определения местонахождения, так что местоположение, оцененное посредством глобальной модели, может быть использовано, если оно приводит к меньшей ошибке пригодности модели.
[0062] Машиночитаемые носители 216 информации могут дополнительно включать в себя компонент 230 определения финального местоположения, который выполнен с возможностью разрешения вопроса в отношении финального местоположения, когда вычислены несколько оцененных местоположений, как когда компонент 228 глобальной модели определения местонахождения оценивает местоположение в дополнение к оцененному местоположению посредством компонента 224 зонального определения местонахождения, и ошибки пригодности модели сравниваются, чтобы разрешить вопрос в отношении финальной оценки местоположения.
Примерные процессы
[0063] Фиг. 3-7 описывают иллюстративные процессы, которые иллюстрируются в качестве совокупности блоков в логическом потоковом графе, который представляет собой последовательность операций, которые могут быть реализованы в аппаратном обеспечении, программном обеспечении, или их сочетании. В контексте программного обеспечения, блоки представляют собой исполняемые компьютером инструкции, которые, когда исполняются одним или более процессорами, выполняют изложенные операции. В целом, исполняемые компьютером инструкции включают в себя подпрограммы, программы, объекты, компоненты, структуры данных, и подобное, что выполняет конкретные функции или реализует конкретные абстрактные типы данных. Очередность, в которой описываются операции, не предназначена для того, чтобы толковаться в качестве ограничения, и любое количество описываемых блоков может быть объединено в любой очередности и/или параллельно, чтобы реализовать процессы.
[0064] Фиг. 3 является блок-схемой иллюстративного процесса 300 для обучения зональной модели. В целях обсуждения, процесс 300 описывается со ссылкой на архитектуру 200 с Фиг. 2, и в частности со ссылкой на компонент 218 обучения зональной модели, включающий в себя компонент 220 разбиения на зоны.
[0065] На этапе 302, компонент 220 разбиения на зоны может разбивать область, такую как область 100 на Фиг. 1, на несколько зон, такие как несколько зон 102(1)-(N). Как рассмотрено выше, зона 100 может быть разбита, используя разнообразные методики, такие как использование системы фрагментарной карты, чтобы назначать фрагменты на определенном уровне системы фрагментарной карты в качестве отдельных зон внутри области. Другие базовые правила (например, указание многоугольных форм минимального или максимального размера) или процессы вручную могут быть использованы для разбиения на зоны на этапе 302. Зоны могут быть изолированными или перекрывающимися и могут быть единообразными или не единообразными по размеру и форме. Более того, доступность данных обучения может обуславливать разбиение области на зоны, как например посредством назначения суб-областей вокруг пороговой величины доступных обучающих данных в качестве зон области 100. В других вариантах осуществления, разбиение на зоны на этапе 302 является независимым от доступности обучающих данных, что может в конечном итоге привести к тому, что некоторые зоны являются «пустыми» зонами, как описано выше.
[0066] На этапе 304, компонент 218 обучения зональной модели генерирует или строит одну или более зональные модели распространения сигнала для индивидуальных одних из одной или более WiFi AP 104(1)-(P) внутри каждой из нескольких зон, определенных на этапе 302. Достаточные данные 212 обследования получаются, чтобы построить действительные зональные модели распространения сигнала. Наблюдения в виде обучающих образцов внутри конкретной зоны могут быть использованы, чтобы строить зональную модель распространения сигнала для этой зоны посредством разрешения вопроса в отношении параметров модели, используя данные 212 наблюдения внутри зоны. Тем не менее, если для конкретной зоны отсутствуют доступные обучающие данные, конкретная зона может быть назначена в качестве пустой зоны, или конкретная зона может «занимать», по меньшей мере, некоторые из обучающих данных, доступных в соседних зонах. Результатом процесса 300 является структура зональной модели с WiFi AP 104(1)-(P), которые ассоциированы с зональными моделями распространения сигнала для нескольких зон 102(1)-(N) области 100.
[0067] Фиг. 4 является структурной схемой иллюстративного процесса 400 для зонального определения местонахождения. Иллюстративный процесс 400 может продолжаться с этапа 304 процесса 300 на Фиг. 3 (как обозначено посредством индикатора «A» на Фиг. 3 и 4), возможно как часть обучения зональной модели в режиме реального времени и процесса определения местонахождения. В целях обсуждения, процесс 400 описывается со ссылкой на архитектуру 200 с Фиг. 2, и в частности со ссылкой на компонент 224 зонального определения местонахождения, включающий в себя компонент 226 выбора зоны.
[0068] На этапе 402, компонент 224 зонального определения местонахождения принимает запрос местоположения, ассоциированный с устройством 204 с возможностью WiFi. Данный запрос местоположения может быть в форме образца 206 WiFi, который указывает WiFi AP 104(1)-(P) в диапазоне и ассоциированные измерения RSS от WiFi AP 104(1)-(P).
[0069] На этапе 404, компонент 226 выбора зоны выбирает целевую зону из нескольких доступных зон области 100, где располагается устройство 204 с возможностью WiFi. Как описано выше, существуют разнообразные способы, посредством которых целевая зона может быть выбрана на этапе 404, включая наивную байесовскую методику выбора зоны, основанную на гистограммах, по меньшей мере, некоторых из WiFi AP 104(1)-(P) внутри области 100. Другие приемлемые подходы включают в себя подход «Минимальной ошибки», или подход «Наиболее Близкой Зоны», как описано выше. Выбор целевой зоны 404 может включать в себя обрезку, или иное игнорирование, маловероятных зон, как например посредством использования фильтра Блума для соответствующих зон, чтобы сравнивать общие WiFi AP 104(1)-(P) в каждой зоне с WiFi AP в диапазоне, включенными в образец 206 WiFi, принятый на этапе 402.
[0070] На этапе 406, компонент 224 зонального определения местонахождения выбирает схему определения местонахождения из основанной на зональной модели схемы определения местонахождения и основанной на сигнатуре схемы определения местонахождения, чтобы использовать для определения местонахождения внутри целевой зоны, выбранной на этапе 404. В некоторых вариантах осуществления, выбор схемы на этапе 406 может зависеть от плотности и покрытия обучающих данных (т.е., образцов 106(1)-(Q) WiFi) внутри целевой зоны, выбранной на этапе 404.
[0071] На этапе 408, компонент 224 зонального определения местонахождения применяет схему определения местонахождения, выбранную на этапе 406, чтобы оценить местоположение устройства 204 с возможностью WiFi. Когда выбирается основанная на зональной модели схема, например, зональная модель распространения сигнала, ассоциированная с целевой зоной, может быть применена, чтобы оценить местоположение устройства 204 с возможностью WiFi. Когда на этапе 406 выбирается основанная на сигнатуре схема, компонент 224 зонального определения местонахождения может определять совпадающий образец 106 WiFi внутри базы данных образцов 106(1)-(Q) WiFi и их соответствующих местоположений, чтобы оценить местоположение устройства 204 с возможностью WiFi. Соответственно, процесс 400 способствует использованию зональных моделей распространения сигнала и/или зональных основанных на сигнатуре схем в целях определения местонахождения, приводя к более хорошей пригодности модели, чтобы обеспечивать более хорошую эффективность для более высокой точности определения местонахождения.
[0072] Фиг. 5 является блок-схемой иллюстративного процесса 500 для выбора целевой зоны во время зонального определения местонахождения. Иллюстративный процесс 500 может быть более подробным процессом, который включен в этап 404 процесса 400, показанного на Фиг. 4. В целях обсуждения, процесс 500 описывается со ссылкой на архитектуру 200 с Фиг. 2, и в частности со ссылкой на компонент 226 выбора зоны.
[0073] На этапе 502, компонент 226 выбора зоны получает гистограммы, содержащие распределения вероятности RRS, ассоциированные с индивидуальными одними из WiFi AP 104(1)-(P) внутри области, такой как область 100 на Фиг. 1. На этапе 504, образец 206 WiFi принимается от устройства 204 с возможностью WiFi, которое является представляющим запрос местоположения. Данный образец 206 WiFi включает в себя все WiFi AP 104(1)-(P) в видимости (т.е., в диапазоне) устройства 204 с возможностью WiFi и сигнатуру RSS, детализирующую измерения RSS на устройстве 204 с возможностью WiFi в отношении каждой из WiFi Ap 104(1)-(P) в видимости.
[0074] На этапе 506, компонент 226 выбора зоны вычисляет вероятность наблюдения представленной в отчете сигнатуры RSS в индивидуальных одних из нескольких зон 102(1)-(N) области 100. В некоторых вариантах осуществления, маловероятные зоны обрезаются для того, чтобы рассматривать только те зоны в наборе кандидатов, использующие исключительно гистограммы зон-кандидатов.
[0075] На этапе 508, компонент 226 выбора зоны выбирает целевую зону из нескольких доступных зон области 100, которые максимизирует вероятность наблюдения представленной в отчете сигнатуры RSS в принятом образце 206 WiFi. Процесс 500 является отражающим наивную байесовскую методику выбора зоны, описанную выше в качестве одного приемлемого подхода для выбора целевой зоны с наилучшим местонахождением для запрашивающего устройства 204 с возможностью WiFi.
[0076] В некоторых случаях, область, в которой должно быть выполнено определение местонахождения, может содержать пространство с 3D объемом с несколькими этажами или уровнями. Фиг. 6 иллюстрирует такую область 600 с несколькими этажами (1)-(N). В данном многоэтажном сценарии, целевой этаж из нескольких доступных этажей (1)-(N) должен быть выбран, чтобы разрешить вопрос в отношении местоположения устройства 204 с возможностью WiFi. Разнообразные подходы могут быть предприняты, чтобы обнаружить целевой этаж, в соответствии с вариантами осуществления раскрываемыми в данном документе. Один примерный подход заключается в рассмотрении каждого этажа в качестве зоны, и в обработке выбора зоны образом подобным тому, что описан выше.
[0077] Другой подход состоит в разбиении этажей на несколько зон образом подобным тому, что описан выше, рассматривая каждый этаж в качестве области. Для каждого этажа может быть выполнено обучение глобальной модели распространения сигнала. Затем обнаружение этажа становится побочным результатом выбора зоны. Т.е., используя любую из описанных выше методик, целевая зона может быть выбрана во время процесса определения местонахождения в ответ на запрос местоположения от устройства 204 с возможностью WiFi, а этаж (например в данном случае этаж 2), ассоциированный с целевой зоной 602, определяется из информации ассоциации сохраненной между зонами и этажами. Чтобы разрешить вопрос в отношении позиции устройства 204 с возможностью WiFi, может быть использована зональная модель распространения сигнала, ассоциированная с целевой зоной 602, и, в некоторых случаях, может быть использована глобальная модель, ассоциированная с этажом 2 (которая может отличаться от глобальных моделей, ассоциированных с другими этажами).
[0078] Фиг. 6 иллюстрирует блок-схему иллюстративного процесса 604 для определения целевого этажа применительно к зональному определению местонахождения. На этапе 606, образец 206 WiFi принимается от устройства 204 с возможностью WiFi, которое является подающим запрос местоположения. Данный образец 206 WiFi включает в себя все WiFi AP 104(1)-(P) в его видимости (т.е., в диапазоне) и сигнатуру RSS, детализирующую измерения RSS на устройстве 204 с возможностью WiFi, соответствующие каждой WiFi AP 104 в видимости.
[0079] На этапе 608, компонент 226 выбора зоны вычисляет вероятность наблюдения представленной в отчете сигнатуры RSS в индивидуальных одних из нескольких зон области 600. В некоторых вариантах осуществления, маловероятные зоны обрезаются, чтобы рассматривать только те зоны в наборе кандидатов, использующие только гистограммы зон-кандидатов.
[0080] На этапе 610, компонент 226 выбора зоны выбирает целевую зону 602 из нескольких доступных зон области 600, которая максимизирует вероятность наблюдения представленной в отчете сигнатуры RSS в принятом образце 206 WiFi. На этапе 612, целевой этаж определяется на основании выбранной целевой зоны 602.
[0081] Фиг. 7 является блок-схемой иллюстративного процесса 700, который компенсирует различие усиления устройств. Т.е., разные устройства 204(1)-(N) с возможностью WiFi имеют склонность к представлению разных измерений силы сигнала WiFi (т.е., разной чувствительности) даже в одном и том же местоположении. Такое различие усиления устройств среди разных устройств 204(1)-(N) с возможностью WiFi, оказывает влияние на процесс основанного на модели определения местонахождения, включая на то, какая зона должна быть выбрана в качестве целевой зоны. Обучающие образцы в данных 212 обследования также могут быть затронуты различием усиления устройств, если разные устройства используются для сбора обучающих образцов для обучения модели.
[0082] На этапе 702, измерение RSS от устройства 204 с возможностью WiFi сдвигается на несколько значений смешения усиления в диапазоне возможных смещений усиления. Например, диапазон смещения усиления в виде от -20дБ до +20дБ может быть использован в качестве диапазона смещения усиления, и заданное измерение RSS в образце 206 WiFi затем смещается многократно по диапазону возможных смещений усиления. Например, один сдвиг может смещать измеренную RSS на -20дБ, тогда как следующий сдвиг может смещать измеренную RSS на -19дБ и так далее, до тех пор, пока последний сдвиг не смещает измеренную RSS на +20дБ.
[0083] На этапе 704, каждое сдвинутое измерение RSS анализируется в отношении вероятности наблюдения соответствующего сдвинутого измерения RSS в индивидуальных одних из нескольких зон области 100, и выбирается зона, которая максимизирует вероятность наблюдения сдвинутого RSS. На этапе 706, смещение усиления соответствующее максимуму среди всех из вероятностей от каждого сдвинутого измерения RSS выбирается на этапе 706 в качестве смещения усиления для принятого измерения RSS. В некоторых вариантах осуществления, зона, выбранная на этапе 704, может быть целевой зоной в целях определения местонахождения, такой как целевая зона, выбираемая на этапе 404 процесса 400 на Фиг. 4. В данном сценарии, смещение усиления может быть использовано во время процесса определения местонахождения, такого как процесс 400 на Фиг. 4.
[0084] Среда и индивидуальные элементы, описанные в данном документе, конечно могут включать в себя много других логических, программных, и физических компонентов, из которых те, что показаны на сопроводительных фигурах являются лишь примерами, которые относятся к обсуждению в данном документе.
[0085] Предполагается, что разнообразные методики, описанные в данном документе в заданных примерах, должны реализовываться в общем контексте исполняемых компьютером инструкций или программного обеспечения, таких как программные модули, которые хранятся в машиночитаемом хранилище и исполняются посредством процессора(ов) одного или более компьютеров или других устройств, таких как те, что иллюстрируются на фигурах. В целом, программные модули включают в себя подпрограммы, программы, объекты, компоненты, структуры данных, и т.д., и определяют логику работы для выполнения конкретных задач или реализации конкретных абстрактных типов данных.
[0086] Другие архитектуры могут быть использованы, чтобы реализовать описанную функциональность, и подразумеваются находящимися в рамках объема данного раскрытия. Кроме того, несмотря на то, что конкретные распределения ответственностей определены выше в целях обсуждения, разнообразные функции и ответственности могут быть распределены и поделены другими способами, в зависимости от обстоятельств.
[0087] Подобным образом, программное обеспечение может быть сохранено и распространятся разнообразными способами и используя разные средства, и конкретное хранилище программного обеспечения и конфигурации исполнения, описанные выше, могут варьироваться многими разными образами. Таким образом, программное обеспечение, реализующее методики, описанные выше, может быть распределено по разнообразным типам машиночитаемых носителей информации, не ограниченных формами памяти, которые в частности описаны.
Заключение
[0088] В заключение, несмотря на то, что разнообразные варианты осуществления были описаны языком, специфичным для структурных признаков и/или методологических действий, должно быть понятно, что предмет изобретения, определяемый в прикрепленных представлениях не обязательно ограничивается конкретными описанными признаками или действиями. Наоборот, конкретные признаки и действия раскрываются в качестве примерных форм реализации заявленного предмета изобретения.




Изобретение относится к радиосвязи. Технический результат заключается в повышении точности при выполнении определения местонахождения, используя зональную структуру. Область разбита на несколько зон, и одна или более модели распространения сигнала для одной или более беспроводных точек доступа (AP) сгенерированы для каждой зоны. Набор зональных моделей распространения сигнала обеспечивает улучшенную пригодность модели на основе каждой зоны. Процесс включает в себя прием запроса местоположения, ассоциированного с устройством беспроводной связи, выбор целевой зоны из нескольких доступных зон области и оценку местоположения устройства беспроводной связи на основании модели распространения сигнала, ассоциированной с целевой зоной, или основанного на сигнатуре определения местонахождения. Модель распространения сигнала, ассоциированная с целевой зоной, сгенерирована на основании обучающих образцов, наблюдаемых исключительно в целевой зоне. 3 н. и 17 з.п. ф-лы, 7 ил.
1. Реализуемый компьютером способ для использования зональных моделей распространения сигнала, чтобы оценивать местоположение устройства беспроводной связи, при этом способ содержит этапы, на которых:
принимают запрос местоположения, ассоциированный с устройством беспроводной связи;
делят, посредством одного или более процессоров, область на множество зон, причем отдельные зоны из упомянутого множества зон расположены по меньшей мере частично внутри упомянутой области и отдельные зоны из упомянутого множества зон ассоциированы с соответствующими зональными моделями распространения сигнала;
определяют, посредством одного или более процессоров, оценочное местоположение устройства беспроводной связи внутри упомянутой области, причем оценочное местоположение основано, по меньшей мере частично, на глобальной модели распространения сигнала, ассоциированной с упомянутой областью;
выбирают, посредством одного или более процессоров, целевую зону из упомянутого множества зон, которая является наиболее близкой к оценочному местоположению устройства беспроводной связи; и
определяют, посредством одного или более процессоров, окончательное оценочное местоположение устройства беспроводной связи на основании, по меньшей мере частично, зональной модели распространения сигнала, ассоциированной с этой целевой зоной, причем эта зональная модель распространения сигнала является одной из соответствующих зональных моделей распространения сигнала.
2. Реализуемый компьютером способ по п. 1, дополнительно содержащий генерирование зональной модели распространения сигнала, ассоциированной с целевой зоной, на основании обучающих образцов, наблюдаемых исключительно внутри целевой зоны.
3. Реализуемый компьютером способ по п. 2, дополнительно содержащий, перед генерированием зональной модели распространения сигнала, определение того, что количество наблюдаемых обучающих образцов удовлетворяет пороговому количеству обучающих образцов или превышает его.
4. Реализуемый компьютером способ по п. 1, в котором этап, на котором выбирают целевую зону, дополнительно содержит этапы, на которых:
принимают образец беспроводной связи от устройства беспроводной связи, при этом образец беспроводной связи указывает силу принятого сигнала (RSS) от одной или более беспроводных точек доступа на устройстве беспроводной связи;
используют соответствующие гистограммы одной или более беспроводных точек доступа, чтобы вычислить вероятность наблюдения образца беспроводной связи в отдельных зонах из упомянутого множества зон; и
выбирают целевую зону из упомянутого множества зон, которая максимизирует вероятность наблюдения упомянутого образца беспроводной связи.
5. Реализуемый компьютером способ по п. 4, дополнительно содержащий этапы, на которых:
отфильтровывают отдельные зоны из упомянутого множества зон на основании сравнения беспроводных точек доступа в упомянутой области с одной или более беспроводными точками доступа, указанными в образце беспроводной связи, чтобы получить набор зон-кандидатов с по меньшей мере одной общей беспроводной точкой доступа для упомянутой одной или более беспроводных точек доступа; и
используют гистограммы, соответствующие беспроводным точкам доступа, расположенным в отдельных зонах из набора зон-кандидатов, чтобы вычислить вероятность наблюдения образца беспроводной связи в отдельных зонах из набора зон-кандидатов.
6. Реализуемый компьютером способ по п. 1, в котором этап, на котором выбирают целевую зону, содержит этап, на котором определяют, что центр целевой зоны находится ближе к оценочному местоположению, чем другие центры других зон из упомянутого множества зон.
7. Реализуемый компьютером способ по п. 1, в котором этап, на котором выбирают целевую зону, дополнительно содержит этапы, на которых:
выбирают подмножество зон из упомянутого множества зон на основании соответствующих расстояний от отдельных зон из упомянутого множества зон до оценочного местоположения;
определяют соответствующие оценочные местоположения устройства беспроводной связи в соответствии с соответствующими зональными моделями распространения сигнала, ассоциированными с каждой зоной в упомянутом подмножестве зон; и
выбирают целевую зону в качестве зоны из упомянутого подмножества зон, которая минимизирует ошибку пригодности модели для соответствующих зональных моделей распространения сигнала.
8. Реализуемый компьютером способ по п. 1, в котором зональная модель распространения сигнала, ассоциированная с целевой зоной, включает в себя одну из модели распространения сигнала с потерей в тракте передачи и линейной модели.
9. Система для использования зональных моделей распространения сигнала, чтобы оценивать местоположение устройства беспроводной связи, причем система содержит:
один или более процессоров; и
одно или более запоминающих устройств, хранящих исполняемые компьютером инструкции, которые при исполнении упомянутым одним или более процессорами, вызывают выполнение операций, содержащих:
прием запроса местоположения, ассоциированного с устройством беспроводной связи;
определение первой оценки местоположения устройства беспроводной связи в некоторой области на основе, по меньшей мере частично, глобальной модели распространения сигнала, ассоциированной с упомянутой областью в целом;
выбор целевой зоны из упомянутого множества доступных зон упомянутой области, причем целевая зона ассоциирована с зональной моделью распространения сигнала, причем каждая из упомянутого множества доступных зон расположена по меньшей мере частично внутри упомянутой области;
определение второй оценки местоположения устройства беспроводной связи в упомянутой области основываясь, по меньшей мере частично, на зональной модели распространения сигнала;
определение, что первая ошибка пригодности модели для глобальной модели распространения сигнала меньше, чем вторая ошибка пригодности модели для зональной модели распространения сигнала; и
определение окончательной оценки местоположения устройства беспроводной связи на основе, по меньшей мере частично, упомянутой глобальной модели распространения сигнала.
10. Система по п. 9, в которой выбор целевой зоны содержит:
прием образца беспроводной связи от устройства беспроводной связи, при этом образец беспроводной связи указывает силу принятого сигнала (RSS) от одной или более беспроводных точек доступа на устройстве беспроводной связи;
использование соответствующих гистограмм одной или более беспроводных точек доступа, чтобы вычислить вероятность наблюдения образца беспроводной связи в отдельных зонах из упомянутого множества доступных зон; и
выбор целевой зоны в качестве некоторой зоны из упомянутого множества доступных зон, которая максимизирует вероятность наблюдения упомянутого образца беспроводной связи.
11. Система по п. 10, причем операции дополнительно содержат:
сдвиг RSS, указанного в образце беспроводной связи, на множество смещений усиления в диапазоне возможных смещений усиления, чтобы получить множество смещенных измерений RSS;
для отдельных смещенных измерений RSS из упомянутого множества смещенных измерений RSS, выбор соответствующих зон из упомянутого множества доступных зон, которые максимизируют вероятность наблюдения этих отдельных смещенных измерений RSS; и
выбор смещения усиления из упомянутого множества смещений усиления, соответствующего максимуму из числа множества вероятностей, определенных для отдельных смещенных измерений RSS.
12. Система по п. 9, в которой глобальная модель распространения сигнала генерируется для отдельных точек беспроводного доступа из множества точек беспроводного доступа в упомянутой области.
13. Система по п. 9, в которой определение второй оценки местоположения содержит выбор набора зон-кандидатов, включающего в себя упомянутую целевую зону, и при этом операции дополнительно содержат:
определение соответствующих зональных моделей распространения сигнала, ассоциированных с каждой зоной в этом наборе зон-кандидатов;
применение соответствующих зональных моделей распространения сигнала для оценки соответствующих местоположений устройства беспроводной связи для каждой из возможных зон; и
получение второй оценки местоположения как среднего значения соответствующих местоположений.
14. Система по п. 9, в которой зональная модель распространения сигнала генерируется на основе обучающих образцов, наблюдаемых исключительно в упомянутой целевой зоне.
15. Система по п. 9, в которой выбор целевой зоны содержит выбор целевой зоны в качестве зоны, имеющей центр, который находится ближе к оценочному местоположению, чем другие центры других зон из упомянутого множества доступных зон.
16. Реализуемый компьютером способ для использования зональных моделей распространения сигнала, чтобы оценивать местоположение устройства беспроводной связи, при этом способ содержит этапы, на которых:
разбивают, посредством одного или более процессоров, область на множество зон, причем отдельные зоны из упомянутого множества зон ассоциированы с соответствующими зональными моделями распространения сигнала;
принимают запрос местоположения, ассоциированный с устройством беспроводной связи;
определяют, посредством одного или более процессоров, оценочное местоположение устройства беспроводной связи внутри упомянутой области, причем оценочное местоположение основано, по меньшей мере частично, на глобальной модели распространения сигнала, ассоциированной с упомянутой областью;
выбирают, посредством одного или более процессоров, целевую зону из упомянутого множества зон, которая является наиболее близкой к оценочному местоположению устройства беспроводной связи; и
определяют, посредством одного или более процессоров, окончательное оценочное местоположение устройства беспроводной связи на основании, по меньшей мере частично, зональной модели распространения сигнала, ассоциированной с этой целевой зоной, причем эта зональная модель распространения сигнала является одной из соответствующих зональных моделей распространения сигнала, при этом зональная модель распространения сигнала, ассоциированная с упомянутой целевой зоной, и глобальная модель распространения сигнала, ассоциированная с упомянутой областью, являются моделями распространения сигнала с потерей в тракте передачи.
17. Реализуемый компьютером способ по п. 16, дополнительно содержащий:
сбор обучающих образцов, указывающих силу принятого сигнала (RSS) в разных местоположениях в пределах упомянутой целевой зоны; и
получение набора параметров зональной модели распространения сигнала для отдельных точек беспроводного доступа в этой целевой зоне на основе упомянутого множества обучающих образцов.
18. Реализуемый компьютером способ по п. 16, в котором разбиение области на множество зон содержит:
определение суб-областей в пределах упомянутой области, которые содержат по меньшей мере пороговое количество наблюдаемых обучающих образцов; и
указание каждой суб-области в качестве отдельной зоны из упомянутого множества зон.
19. Реализуемый компьютером способ по п. 16, в котором выбор целевой зоны дополнительно содержит:
прием из одной или более точек беспроводного доступа на устройстве беспроводной связи образца беспроводной связи;
получение набора зон-кандидатов с по меньшей мере одной общей точкой беспроводного доступа для упомянутой одной или более точек беспроводного доступа посредством отфильтровывания отдельных зон из упомянутого множества зон на основе сравнения точек беспроводного доступа в упомянутой области с точками беспроводного доступа, указанными в образце беспроводной связи; и
вычисление вероятности наблюдения образца беспроводной связи в отдельных зонах из упомянутого набора зон-кандидатов с использованием распределений вероятности, соответствующих точкам беспроводного доступа, расположенным в отдельных зонах из упомянутого набора зон-кандидатов.
20. Реализуемый компьютером способ по п. 16, в котором выбор целевой зоны дополнительно содержит:
идентификацию на основе, по меньшей мере частично, соответствующих расстояний от отдельных зон из упомянутого множества зон до оценочного местоположения, подмножества зон из числа упомянутого множества зон;
определение на основе соответствующих зональных моделей распространения сигнала, ассоциированных с каждой зоной в упомянутом подмножестве зон, соответствующих оценочных местоположений устройства беспроводной связи; и
выбор целевой зоны из упомянутого подмножества зон, которая минимизирует ошибку пригодности модели для соответствующих зональных моделей распространения сигнала.
| US 2013260799 A1, 03.10.2013 | |||
| WO 03102622 A1, 11.12.2003 | |||
| СПОСОБ ЩЕЛЕОБРАЗОВАНИЯ В СКВАЖИНАХ И ШПУРАХ И ЩЕЛЕОБРАЗОВАТЕЛЬ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2602634C1 |
| US 2007258421 A1, 08.11.2007 | |||
| RU 2011111556 A, 10.10.2012. | |||

