Изобретение относится к способам изготовления устройств на основе пьезоматериалов, а именно пьезоэлектрических актюаторов осевых и угловых перемещений для использования в микромеханике, управляемой оптике, сенсорной технике, акустике, в частности, при изготовлении манипуляторов робототехнических устройств.
Наиболее близким способом того же назначения к заявленному изобретению по совокупности признаков является способ изготовления пьезоэлектрического актюатора (патент RU №1159154 от 30.05.1985г.), включающий в себя нанесение токопроводящих электродных ленточных покрытий противоположно друг другу на верхней и нижней поверхностях тонкого пьезоэлектрического слоя с образованием взаимодействующих электродов двухпроводной токопроводящей линии, при этом поляризацию слоя осуществляют посредством приложения к электродам поляризующего электрического напряжения. Данный способ принят за прототип.
Недостатком известного способа изготовления, принятого за прототип, является малая эффективность - отношение величины (амплитуды) осевых перемещений рабочих участков пьезоэлектрического актюатора получаемого этим способом к значениям приложенного управляющего напряжения вследствие малости деформационных пьезомодулей материала (керамики) пьезоэлектрического слоя.
Признаки прототипа, совпадающие с существенными признаками заявляемого изобретения, - нанесение токопроводящих электродных ленточных покрытий противоположно друг другу на верхней и нижней поверхностях пьезоэлектрического слоя с образованием взаимодействующих электродов двухпроводной токопроводящей линии, при этом поляризацию слоя осуществляют посредством приложения к электродам поляризующего электрического напряжения.
Задачей, на решение которой направлено изобретение, является разработка способа изготовления пьезоэлектрического актюатора с повышенной эффективностью.
Поставленная задача была решена за счет того, что в известном способе изготовления пьезоэлектрического актюатора, включающем нанесение токопроводящих электродных ленточных покрытий противоположно друг другу на верхней и нижней поверхностях пьезоэлектрического слоя с образованием взаимодействующих электродов двухпроводной токопроводящей линии, при этом поляризацию слоя осуществляют посредством приложения к электродам поляризующего электрического напряжения, согласно изобретению наносят электродные ленточные покрытия на верхнюю и нижнюю поверхности пьезоэлектрического слоя прямоугольной формы в виде множества параллельных прямолинейных чередующихся четных и нечетных отрезков электродов с заданным малым шагом и заданным ориентационным углом к основанию периметра пьезоэлектрического слоя, затем на верхнюю и нижнюю поверхности пьезоэлектрического слоя вдоль прямолинейных участков его периметра наносят два линейных базовых электрода, не контактирующие между собой и каждый из которых соединяет собой окончания соответственно четных и нечетных отрезков электродов, с образованием двух глобальных напрямую не контактирующих между собой двухсторонних систем электродов с двумя выходами для подключения управляющего электрического напряжения.
Кроме того, пьезоэлектрический слой изготавливают из полимерного композиционного материала, армированного продольно поляризованными пьезоэлектрическими волокнами или монокристаллами ортогонально направлению параллельных отрезков электродов.
Кроме того, ориентационный угол между направлением параллельных отрезков электродов и основанием периметра прямоугольного пьезоэлектрического слоя выполняют равным нулю или π/4 или π/2.
Кроме того, цилиндрический пьезоэлектрический актюатор получают в результате сворачивания пьезоэлектрического актюатора как развертки в цилиндрическую оболочку, в частности, с использованием цилиндрической подложки и соединения контактирующих торцов пьезоэлектрического слоя адгезионной клеевой прослойкой вдоль образующей цилиндрической оболочки с выполнением условия отсутствия электрического контакта между электродами различных глобальных двухсторонних систем электродов.
Кроме того, цилиндрический пьезоэлектрический актюатор получают в результате сворачивания пьезоэлектрического актюатора в цилиндрический многослойный рулон, в частности, с использованием цилиндрической подложки и адгезионной клеевой прослойки между витками с выполнением условия отсутствия электрического контакта между электродами различных глобальных двухсторонних систем электродов.
Кроме того, изготавливают двухслойный пьезоэлектрический актюатор, состоящий из соединенных своими поверхностями посредством электроизоляционной клеевой прослойки двух пьезоэлектрических актюаторов, при этом ориентационные углы между направлениями параллельных отрезков электродов различных пьезоэлектрических актюаторов имеют разные знаки и одинаковые абсолютные значения, а управляющие электрические напряжения на выходах различных пьезоэлектрических актюаторов имеют одинаковые или противоположные по знаку значения.
Целесообразно нанесение внешнего защитного электроизоляционного покрытия.
Признаки заявляемого технического решения, отличительные от прототипа, – наносят электродные ленточные покрытия на верхнюю и нижнюю поверхности пьезоэлектрического слоя прямоугольной формы в виде множества параллельных прямолинейных чередующихся четных и нечетных отрезков электродов с заданным малым шагом и заданным ориентационным углом к основанию периметра пьезоэлектрического слоя; на верхнюю и нижнюю поверхности пьезоэлектрического слоя вдоль прямолинейных участков его периметра наносят два линейных базовых электрода, не контактирующие между собой и каждый из которых соединяет собой окончания соответственно четных и нечетных отрезков электродов, с образованием двух глобальных напрямую не контактирующих между собой двухсторонних систем электродов с двумя выходами для подключения управляющего электрического напряжения; пьезоэлектрический слой изготавливают из полимерного композиционного материала, армированного продольно поляризованными пьезоэлектрическими волокнами или монокристаллами ортогонально направлению параллельных отрезков электродов; ориентационный угол между направлением параллельных отрезков электродов и основанием периметра прямоугольного пьезоэлектрического слоя выполняют равным нулю или π/4 или π/2; цилиндрический пьезоэлектрический актюатор получают в результате сворачивания пьезоэлектрического актюатора как развертки в цилиндрическую оболочку, в частности, с использованием цилиндрической подложки и соединения контактирующих торцов пьезоэлектрического слоя адгезионной клеевой прослойкой вдоль образующей цилиндрической оболочки с выполнением условия отсутствия электрического контакта между электродами различных глобальных двухсторонних систем электродов; цилиндрический пьезоэлектрический актюатор получают в результате сворачивания пьезоэлектрического актюатора в цилиндрический многослойный рулон, в частности, с использованием цилиндрической подложки и адгезионной клеевой прослойки между витками с выполнением условия отсутствия электрического контакта между электродами различных глобальных двухсторонних систем электродов; изготавливают двухслойный пьезоэлектрический актюатор, состоящий из соединенных своими поверхностями посредством электроизоляционной клеевой прослойки двух пьезоэлектрических актюаторов, при этом ориентационные углы между направлениями параллельных отрезков электродов различных пьезоэлектрических актюаторов имеют разные знаки и одинаковые абсолютные значения, а управляющие электрические напряжения на выходах различных пьезоэлектрических актюаторов имеют одинаковые или противоположные по знаку значения; наносят внешнее защитное электроизоляционное покрытие.
Отличительные признаки, в совокупности с известными, позволяют разработать способ изготовления пьезоэлектрического актюатора с повышенной эффективностью.
Заявителю неизвестно использование в науке и технике отличительных признаков заявленного способа изготовления такого пьезоэлектрического актюатора с получением указанного технического результата.
Предлагаемый способ изготовления пьезоэлектрического актюатора иллюстрируется чертежами, представленными на фиг. 1-3.
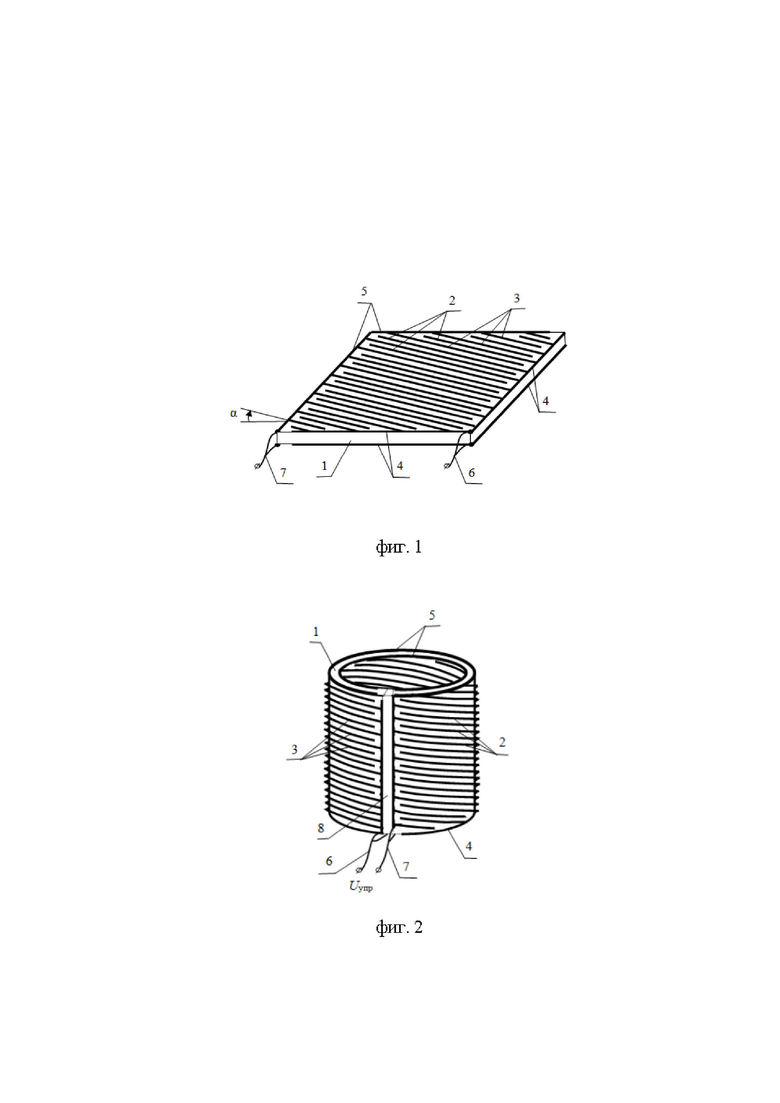
На фиг. 1 изображен пьезоэлектрический слой прямоугольной формы с двухпроводной токопроводящей линией в виде двух глобальных двухсторонних систем электродов, включающих в себя базовые электроды и параллельные четные или нечетные отрезки электродов, с двумя выходами для подключения управляющего электрического напряжения Uупр.
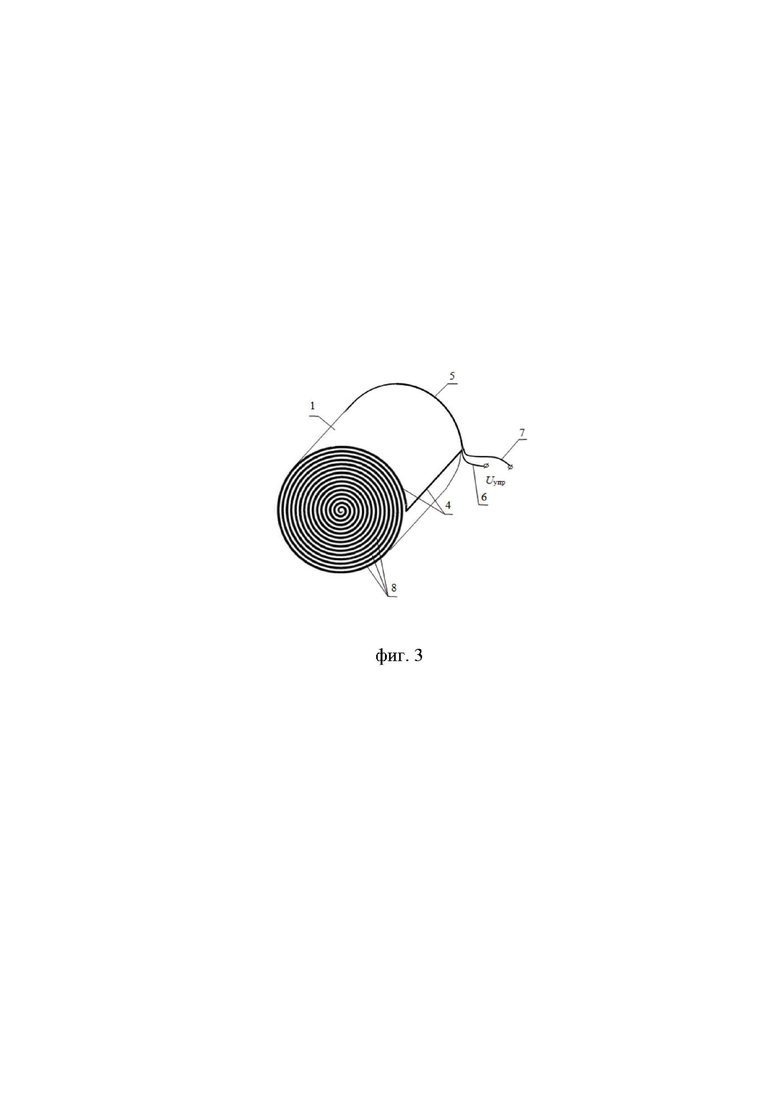
На фиг. 2 изображен цилиндрический пьезоэлектрический актюатор как результат сворачивания пьезоэлектрического слоя с двумя глобальными двухсторонними системами электродов в цилиндрическую оболочку с использованием адгезионной клеевой прослойки вдоль ее образующей.
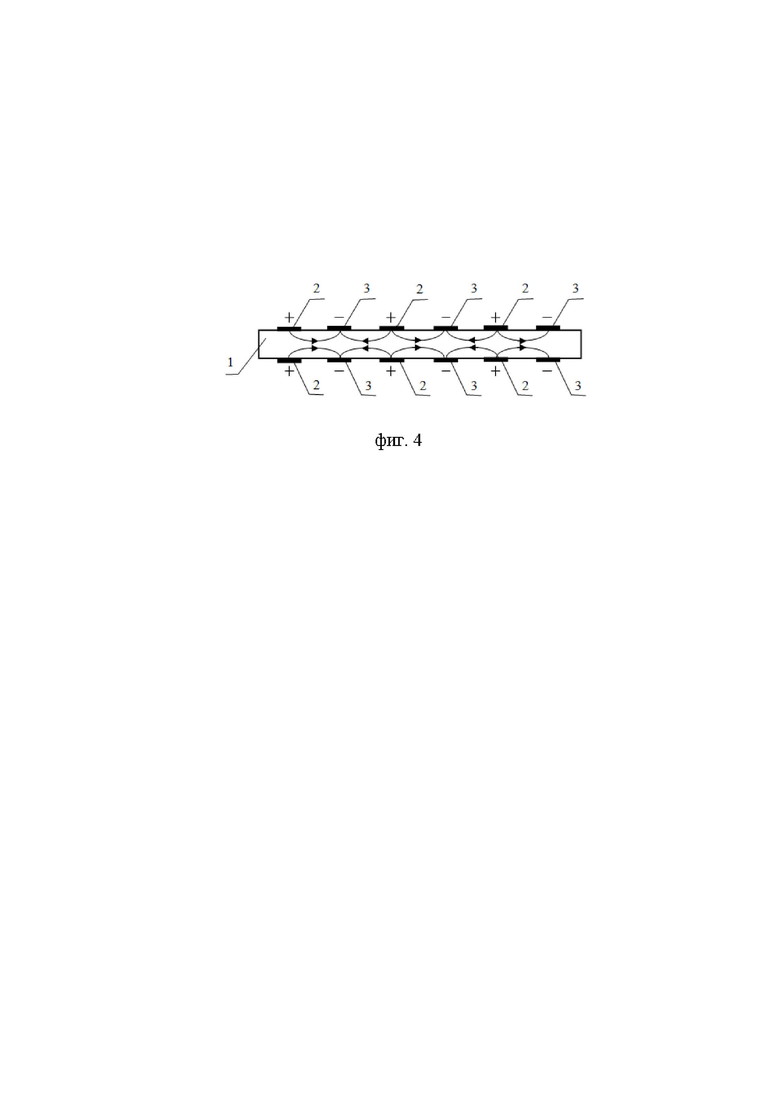
На фиг. 3 изображен цилиндрический пьезоэлектрический актюатор как результат сворачивания пьезоэлектрического слоя с двумя глобальными двухсторонними системами электродов в цилиндрический многослойный рулон с использованием адгезионной клеевой прослойки между витками.
На фиг. 4 изображена схема взаимного расположения токопроводящих электродных ленточных покрытий противоположно друг другу на обеих поверхностях пьезоэлектрического слоя и криволинейные направления поляризаций (вдоль силовых линий управляющего электрического поля) локальных областей пьезоэлектрического слоя.
Способ изготовления цилиндрического пьезоэлектрического актюатора (см. фиг. 2, фиг. 3) включает в себя нанесение токопроводящих электродных ленточных покрытий противоположно друг другу на верхней и нижней поверхностях тонкого пьезоэлектрического слоя 1 с образованием взаимодействующих электродов 2, 3 двухпроводной токопроводящей линии (см. фиг. 1), при этом поляризацию пьезоэлектрического слоя 1 осуществляют посредством приложения к электродам 2, 3 поляризующего электрического напряжения Uпол.
На верхнюю и нижнюю поверхности пьезоэлектрического слоя 1 прямоугольной формы наносят электроды 2, 3 двухпроводной токопроводящей линии в виде множества параллельных прямолинейных чередующихся четных 2 и нечетных 3 отрезков ленточных покрытий с заданным малым шагом и заданным ориентационным углом α (см. фиг. 1) к основанию периметра пьезоэлектрического слоя 1.
Ориентационный угол α (см. фиг. 1) между направлением параллельных отрезков электродов и основанием периметра прямоугольного пьезоэлектрического слоя выполняют равным нулю или π/4 или π/2.
Затем на верхнюю и нижнюю поверхности пьезоэлектрического слоя 1 вдоль прямолинейных участков его периметра наносят два линейных базовых электрода 4, 5, не контактирующие между собой и каждый из которых соединяет собой окончания соответственно четных 2 и нечетных 3 отрезков электродов 2, 3, с образованием двухпроводной токопроводящей линии в виде двух глобальных напрямую не контактирующих между собой двухсторонних систем электродов с двумя выходами 6, 7 для подключения управляющего электрического напряжения Uупр.
Нанесение токопроводящих электродных ленточных покрытий 2,3,4,5 на поверхностях пьезоэлектрического слоя 1 осуществляют в результате травления или 3-D печатью.
Пьезоэлектрический слой 1 изготавливают из полимерного композиционного материала, армированного продольно поляризованными пьезоэлектрическими волокнами или монокристаллами ортогонально направлению параллельных отрезков электродов 2,3 для увеличения гибкости и эффективного значения продольного пьезоэлектрического модуля пьезоэлектрического слоя 1.
Цилиндрический пьезоэлектрический актюатор (см. фиг. 2) может быть получен в результате сворачивания пьезоэлектрического слоя 1 с нанесенными на его поверхности двумя глобальными системами электродов 2,4 и 3,5 в цилиндрическую оболочку, в частности, с использованием вспомогательной цилиндрической подложки и последующего соединения контактирующих торцов пьезоэлектрического слоя 1 адгезионной клеевой прослойкой 8 вдоль образующей цилиндрической оболочки с выполнением условия отсутствия электрического контакта между электродами 2,4 и 3,5 двух различных глобальных двухсторонних систем электродов.
Цилиндрический пьезоэлектрический актюатор (см. фиг. 3) может быть получен в результате сворачивания пьезоэлектрического слоя 1 с нанесенными на его поверхности двумя глобальными системами электродов 2,4 и 3,5 (на фиг. 3 электроды 2,3 не изображены) в цилиндрический многослойный рулон, в частности, с использованием цилиндрической подложки (на фиг. 3 не изображена) и адгезионной клеевой прослойки 8 между витками пьезоэлектрического слоя 1 с выполнением условия отсутствия электрического контакта между электродами 2,4 и 3,5 различных глобальных двухсторонних систем электродов.
В частности, изготавливают двухслойный пьезоэлектрический актюатор, состоящий из соединенных своими поверхностями посредством электроизоляционной клеевой прослойки двух пьезоэлектрических актюаторов, при этом ориентационные углы ±α между направлениями параллельных отрезков электродов 2,3 различных пьезоэлектрических актюаторов имеют разные знаки и одинаковые абсолютные значения, а управляющие электрические напряжения на выходах различных пьезоэлектрических актюаторов имеют одинаковые (Uупр) или противоположные по знаку (±Uупр) значения.
На поверхность цилиндрического пьезоэлектрического актюатора (см. фиг. 2) наносят внешнее защитное электроизоляционное покрытие (на фиг. 1 – фиг. 4 не изображено).
Устройство работает следующим образом.
Цилиндрический пьезоэлектрический актюатор (см. фиг. 2, фиг. 3) осуществляет осевые (радиальные, окружные, продольные) и угловые (крутильные) деформации при подключении управляющего электрического напряжения Uупр к выходам 6,7 двух глобальных двухсторонних систем электродов 2,4 и 3,5.
Силовые линии электрического поля (см. фиг. 4) в соседних участках пьзоэлектрического слоя 1 между ленточными электродами 2,3 направлены взаимопротивоположно (с периодическим чередованием по ортогональному электродам направлению вдоль слоя), при этом направления электрического поля на участках совпадают или противоположны направлениям взаимообратных поляризаций этих участков в зависимости от знака подключенного к выходам 6,7 управляющего электрического напряжения Uупр.
В пьзоэлектрическом слое 1 между соседними электродами 2,3 двух различных глобальных двухсторонних систем электродов 2,4 и 3,5 возникают высокие значения напряженности (E1,2 ≈ Uупр/d) электрического поля, что обусловлено малыми (в частности, d < 1 мм) значениями расстояния d между соседними электродами 2,3 и большими (до 1500 В) значениями управляющих напряжений Uупр.
В результате обратного пьезоэффекта в участках пьзоэлектрического слоя 1 между соседними электродами 2,3 возникают (вдоль ортогонального к электродам направления) высокие значения осевых (сжимающих или растягивающих в зависимости от знака управляющего электрического напряжения Uупр) деформаций, что обуславливает высокую эффективность созданного предложенным способом пьезоэлектрического актюатора.
Пьезоэлектрический актюатор (см. фиг. 1 – фиг. 3) может функционировать в режиме пьезоэлектрического датчика - электромеханического преобразователя (в зависимости от величины ориентационного угла α) осевых (радиальных, окружных, продольных) и/или угловых (крутильных) деформаций пьезоэлектрического актюатора в информативные электрические сигналы напряжения Uинф на выходах 6,7.
Таким образом, предложенное техническое решение - способ изготовления пьезоэлектрического актюатора позволяет создать пьезоэлектрический актюатор с повышенной эффективностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗГОТОВЛЕНИЯ ПЬЕЗОЭЛЕКТРИЧЕСКОГО АКТЮАТОРА | 2023 |
|
RU2817399C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПЬЕЗОЭЛЕКТРИЧЕСКОГО АКТЮАТОРА | 2024 |
|
RU2837440C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКТЮАТОР | 2023 |
|
RU2801619C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКТЮАТОР | 2023 |
|
RU2811455C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПЬЕЗОЭЛЕКТРИЧЕСКОГО АКТЮАТОРА | 2024 |
|
RU2835767C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПЬЕЗОЭЛЕКТРИЧЕСКОГО АКТЮАТОРА | 2024 |
|
RU2839713C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКТЮАТОР | 2023 |
|
RU2811499C1 |
| ЛОПАСТЬ ВОЗДУШНОГО ВИНТА С УПРАВЛЯЕМОЙ ГЕОМЕТРИЕЙ АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТИ | 2024 |
|
RU2841110C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКТЮАТОР | 2023 |
|
RU2818079C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПЬЕЗОЭЛЕКТРИЧЕСКОГО АКТЮАТОРА | 2024 |
|
RU2822349C1 |
Изобретение относится к способам изготовления устройств на основе пьезоматериалов. Технический результат заключается в расширении арсенала средств при создании актюатора с повышенными параметрами эффективности. Способ изготовления пьезоэлектрического актюатора включает нанесение токопроводящих электродных ленточных покрытий противоположно друг другу на верхней и нижней поверхностях пьезоэлектрического слоя с образованием взаимодействующих электродов двухпроводной токопроводящей линии, наносят электродные ленточные покрытия на верхнюю и нижнюю поверхности пьезоэлектрического слоя прямоугольной формы в виде множества параллельных прямолинейных чередующихся четных и нечетных отрезков электродов с заданным малым шагом и заданным ориентационным углом к основанию периметра пьезоэлектрического слоя, наносят на верхнюю и нижнюю поверхности пьезоэлектрического слоя два линейных базовых электрода, с образованием двух глобальных напрямую не контактирующих между собой двухсторонних систем электродов с двумя выходами для подключения управляющего электрического напряжения. 6 з.п. ф-лы, 4 ил.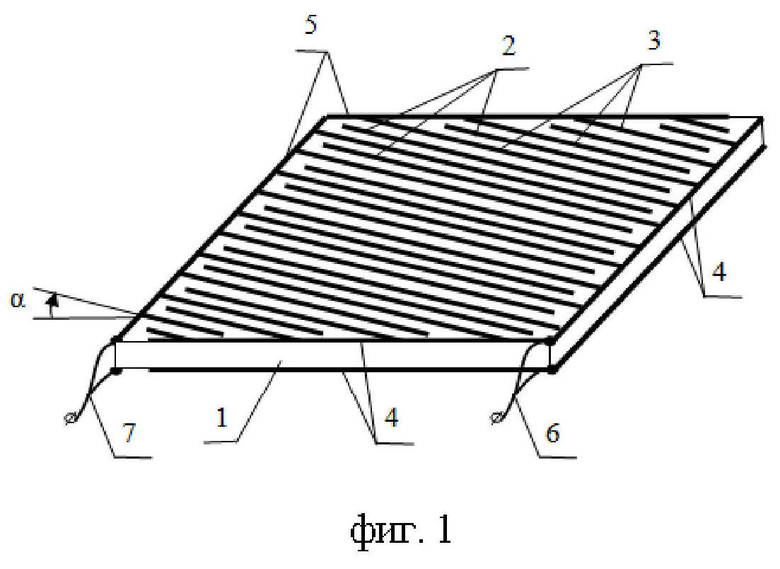
1. Способ изготовления пьезоэлектрического актюатора, включающий нанесение токопроводящих электродных ленточных покрытий противоположно друг другу на верхней и нижней поверхностях пьезоэлектрического слоя с образованием взаимодействующих электродов двухпроводной токопроводящей линии, при этом поляризацию слоя осуществляют посредством приложения к электродам поляризующего электрического напряжения, отличающийся тем, что наносят электродные ленточные покрытия на верхнюю и нижнюю поверхности пьезоэлектрического слоя прямоугольной формы в виде множества параллельных прямолинейных чередующихся четных и нечетных отрезков электродов с заданным малым шагом и заданным ориентационным углом к основанию периметра пьезоэлектрического слоя, затем на верхнюю и нижнюю поверхности пьезоэлектрического слоя вдоль прямолинейных участков его периметра наносят два линейных базовых электрода, не контактирующие между собой и каждый из которых соединяет собой окончания соответственно четных и нечетных отрезков электродов, с образованием двух глобальных напрямую не контактирующих между собой двухсторонних систем электродов с двумя выходами для подключения управляющего электрического напряжения.
2. Способ по п.1, отличающийся тем, что пьезоэлектрический слой изготавливают из полимерного композиционного материала, армированного продольно поляризованными пьезоэлектрическими волокнами или монокристаллами ортогонально направлению параллельных отрезков электродов.
3. Способ по п.1, отличающийся тем, что ориентационный угол между направлением параллельных отрезков электродов и основанием периметра прямоугольного пьезоэлектрического слоя выполняют равным нулю или π/4 или π/2.
4. Способ по п.1, отличающийся тем, что получают цилиндрический пьезоэлектрический актюатор в результате сворачивания пьезоэлектрического актюатора как развертки в цилиндрическую оболочку, в частности, с использованием цилиндрической подложки и соединяют контактирующие торцы пьезоэлектрического слоя адгезионной клеевой прослойкой вдоль образующей цилиндрической оболочки с выполнением условия отсутствия электрического контакта между электродами различных глобальных двухсторонних систем электродов.
5. Способ по п.1, отличающийся тем, что пьезоэлектрический актюатор сворачивают в цилиндрический многослойный рулон, в частности, с использованием цилиндрической подложки и адгезионной клеевой прослойки между витками с выполнением условия отсутствия электрического контакта между электродами различных глобальных двухсторонних систем электродов.
6. Способ по п.1, отличающийся тем, что изготавливают двухслойный пьезоэлектрический актюатор, состоящий из соединенных своими поверхностями посредством электроизоляционной клеевой прослойки двух пьезоэлектрических актюаторов, при этом ориентационные углы между направлениями параллельных отрезков электродов различных пьезоэлектрических актюаторов имеют разные знаки и одинаковые абсолютные значения, а управляющие электрические напряжения на выходах различных пьезоэлектрических актюаторов имеют одинаковые или противоположные по знаку значения.
7. Способ по п.1, отличающийся тем, что наносят внешнее защитное электроизоляционное покрытие.
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКТЮАТОР | 2023 |
|
RU2801619C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ БИМОРФ ИЗГИБНОГО ТИПА | 2022 |
|
RU2793564C1 |
| US 7737608 B2, 15.06.2010 | |||
| САМОЧУВСТВИТЕЛЬНЫЙ МНОГОСЛОЙНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКТЮАТОР | 2015 |
|
RU2616225C1 |
| CN 108199607 A, 22.06.2018. | |||

