Изобретение относится к области изготовления лопасти воздушного винта с управляемой геометрией аэродинамической поверхности, в частности, в авиации для управления геометрией аэродинамических профилей лопастей вертолетов с целью выбора оптимальной формы лопасти воздушного винта в зоне задней кромки для уменьшения шумов и вибраций обшивки при одновременном улучшении режима и линии полета.
Наиболее близкой конструкцией того же назначения к заявленному изобретению по совокупности признаков является конструкция лопасти воздушного винта вертолета (публикация: Kovalovs A., Barkanov E., Ruchevskis S., Wesolowski M. Modeling and design of a full-scale rotor blade with embedded piezocomposite actuators // Mechanics of Composite Materials, 2017, Vol. 53, No. 2, pp.179-192), содержащая несущие упругие верхнюю и нижнюю обшивки лопасти, пьезоэлектрические приводы на верхней и/или нижней обшивках, при этом пьезоэлектрические приводы выполнены в виде пленочных пьезоэлектрических MFC-актюаторов прямоугольной формы из пьезоэлектрического слоя и двух взаимодействующих (через локальные участки пьезоэлектрического слоя) подсистем встречно-штыревых поверхностных электродов с ортогональным расположением их к основанию актюатора с выходами для подключения к электродам управляющего электрического напряжения. Отклонение вверх (или вниз) закрылка лопасти обуславливается пьезоэлектрическим сжатием верхней и растяжением нижней обшивок (или наоборот), что управляется знаком и величиной приложенного к выходам электродов управляющего электрического напряжения. Данная конструкция лопасти принята за прототип.
Признаки прототипа, совпадающие с существенными признаками заявляемого изобретения, – несущие упругие верхнюю и нижнюю обшивки лопасти, пьезоэлектрические приводы на верхней и/или нижней обшивках, при этом пьезоэлектрические приводы выполнены в виде пленочных пьезоэлектрических актюаторов из пьезоэлектрического слоя со встречно-штыревыми поверхностными электродами с выходами для подключения к ним управляющего электрического напряжения.
Недостатком известной конструкции, принятой за прототип, является невозможность установки пьезоэлектрического актюатора с требуемой оптимальной ориентацией встречно-штыревых электродов (относительно контура обшивки лопасти) непосредственно вблизи контура обшивки и/или вблизи установленных соседних пьезоэлектрических актюаторов, что, как следствие, существенно нарушает условие оптимальности локально-ориентационного распределения по поверхности обшивки и снижает эффект (качество) управления геометрией аэродинамической поверхности лопасти.
Техническим результатом, на достижение которого направлено изобретение, является повышение эффекта (качества) управления геометрией аэродинамической поверхности лопасти посредством конструктивного расширения возможности и повышения точности установки пьезоэлектрического актюатора с требуемой ориентацией встречно-штыревых электродов вблизи контура обшивки и/или в окрестности соседних пьезоэлектрических актюаторов.
Указанный технический результат достигается тем, что в известной лопасти воздушного винта с управляемой геометрией аэродинамической поверхности, содержащей несущие упругие верхнюю и нижнюю обшивки лопасти, пьезоэлектрические приводы на верхней и/или нижней обшивках, при этом пьезоэлектрические приводы выполнены в виде пленочных пьезоэлектрических актюаторов из пьезоэлектрического слоя со встречно-штыревыми поверхностными электродами с выходами для подключения к ним управляющего электрического напряжения, согласно изобретению использованы пьезоэлектрические актюаторы в виде пьезоэлектрических ячеек с варьируемыми значениями ориентационного угла встречно-штыревых электродов к основанию ячейки, при этом пьезоэлектрические ячейки установлены на поверхностях обшивки с заданной ориентацией их встречно-штыревых электродов к основаниям ячеек и/или контура обшивки.
В частности, для повышения эффективности управления пьезоэлектрические ячейки могут быть установлены на обшивке заданным оптимальным образом, например с плотной тетрагональной укладкой прямоугольных ячеек и заданными оптимальными ориентационными углами встречно-штыревых электродов внутри ячеек с учетом их мест расположений на обшивке и общего целевого назначения.
В частности для повышения эффективности управления пьезоэлектрические ячейки могут быть введены в действие одновременно или независимо друг от друга при подключении к выходам их электродов одинакового общего значения или индивидуальных значений управляющего электрического напряжения.
Признаки заявляемого технического решения, отличительные от прототипа: использованы пьезоэлектрические актюаторы в виде пьезоэлектрических ячеек с варьируемыми значениями ориентационного угла встречно-штыревых электродов к основанию ячейки, при этом пьезоэлектрические ячейки установлены на поверхностях обшивки с заданной ориентацией их встречно-штыревых электродов к основаниям ячеек и/или контура обшивки; пьезоэлектрические ячейки установлены на обшивке заданным оптимальным образом, например, с плотной тетрагональной укладкой прямоугольных ячеек и заданными оптимальными ориентационными углами встречно-штыревых электродов внутри ячеек с учетом их мест расположений на обшивке и общего целевого назначения; пьезоэлектрические ячейки введены в действие одновременно или независимо друг от друга при подключении к выходам их электродов одинакового общего значения или индивидуальных значений управляющего электрического напряжения.
Отличительные признаки в совокупности с известными позволяют обеспечить повышение эффекта (качества) управления геометрией аэродинамической поверхности лопасти посредством конструктивного расширения возможности и повышения точности установки пьезоэлектрического актюатора с требуемой ориентацией встречно-штыревых электродов вблизи контура обшивки и/или в окрестности соседних пьезоэлектрических актюаторов.
Лопасть воздушного винта с управляемой геометрией профиля иллюстрируется чертежами, представленными на фиг. 1-2.
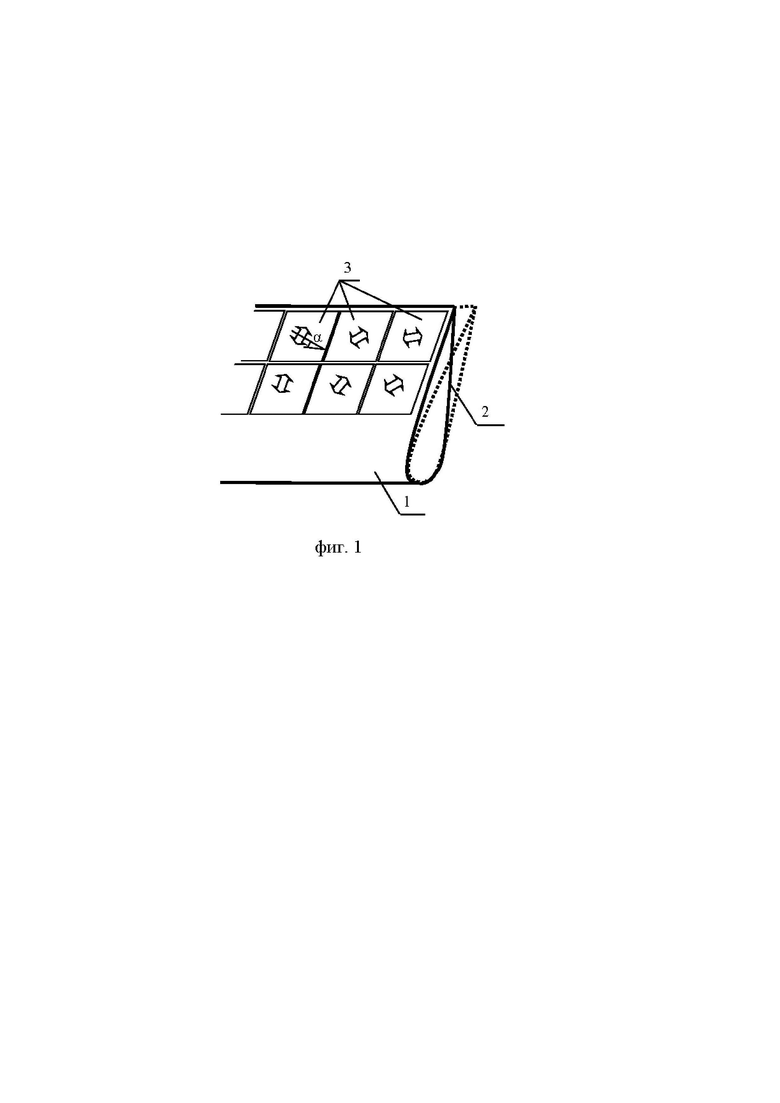
На фиг. 1 схематически изображена лопасть воздушного винта с установленными на верхней обшивке пьезоэлектрическими ячейками.
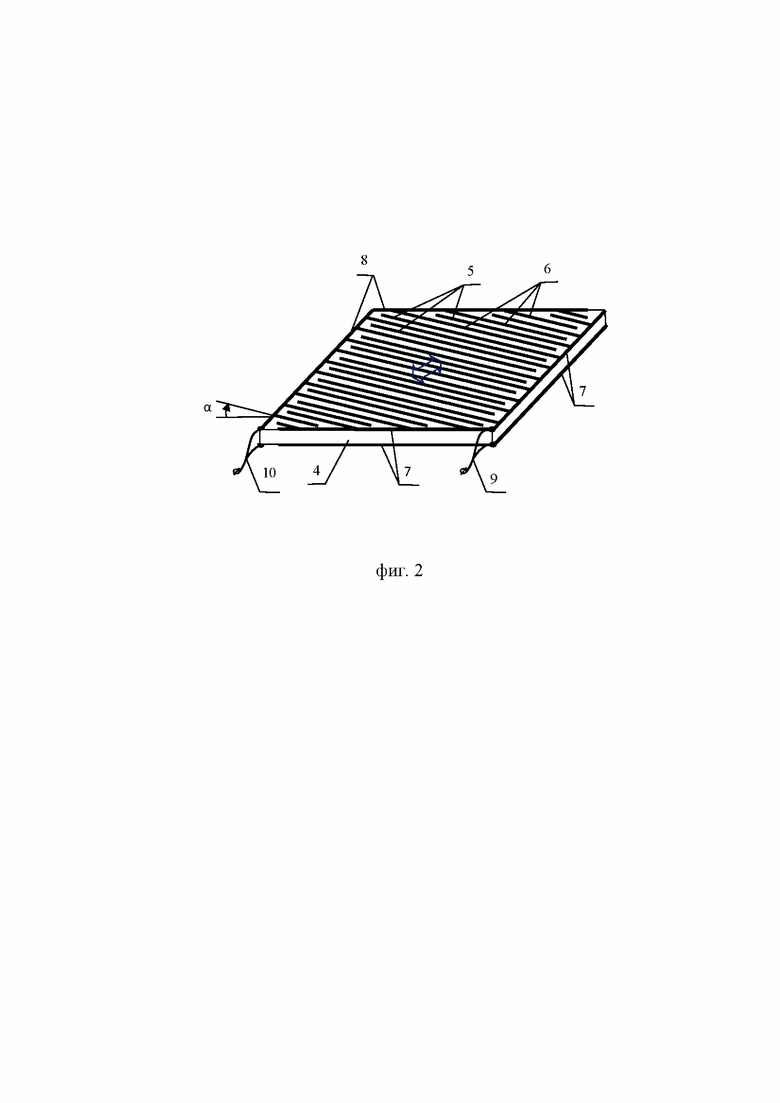
На фиг. 2 изображена «пьезоэлектрическая ячейка» - пленочный пьезоэлектрический актюатор в виде пьезоэлектрического слоя с взаимодействующими (через локальные участки пьезоэлектрического слоя) встречно-штыревыми поверхностными электродами с варьируемым значением ориентационного угла α к основанию ячейки и выходами для подключения управляющего электрического напряжения Uупр.
Лопасть воздушного винта с управляемой геометрией аэродинамической поверхности (фиг.1) содержит несущие упругие верхнюю 1 и нижнюю 2 обшивки 1, 2 лопасти, пьезоэлектрические приводы на верхней и/или нижней обшивках. Пьезоэлектрические приводы выполнены в виде пьезоэлектрических ячеек 3.
Пьезоэлектрическая ячейка - это пленочный пьезоэлектрический актюатор, состоящий из пьезоэлектрического однородного или композитного слоя заданной формы с расположенными на верхней и/или нижней поверхностях взаимодействующими «древовидными» электродами [см. Патент RU № 2818079. Пьезоэлектрический актюатор / Паньков А.А., Опубликовано: 24.04.2024 Бюл. № 12], включающими в себя два разнополярных базовых электродов с выходами для подключения управляющего электрического напряжения Uупр и взаимодействующие встречно-штыревые электроды, отходящие в виде отростков от базовых электродов.
В общем случае форма пьезоэлектрической ячейки, базовые и встречно-штыревые электроды являются криволинейными с заданной ориентацией встречно-штыревых электродов относительно базовых электродов и границ (периметра) пьезоэлектрической ячейки.
В частном случае пьезоэлектрическая ячейка имеет вид параллелограмма или прямоугольника (фиг. 2) [см. Патент RU № 2811420. Способ изготовления пьезоэлектрического актюатора / Паньков А.А., Опубликовано: 11.01.2024 Бюл. № 2] и включает в себя тонкий пьезоэлектрический слой 4, «встречно-штыревые» электроды 5,6 – прямолинейные и параллельные между собой ленточные электродные покрытия, расположенные под заданным ориентационным углом α к основанию периметра пьезоэлектрического слоя 4, на верхней и нижней поверхностях пьезоэлектрического слоя 4 противоположно друг другу, два линейных базовых электрода 7, 8, каждый из которых соединяет собой окончания соответственно четных 5 и нечетных 6 электродов 5, 6 с образованием двухпроводной токопроводящей линии с выходами 9, 10 для подключения управляющего электрического напряжения Uупр.
Встречно-штыревые электроды 5,6 взаимодействуют между собой через соответствующие локальные промежуточные участки пьезоэлектрического слоя 4 при подключении к выходам 9, 10 управляющего электрического напряжения Uупр.
Поляризацию пьезоэлектрического слоя 4 осуществляют посредством приложения к выходам 9, 10 поляризующего электрического напряжения Uпол.
Нанесение ленточных электродов 5,6,7,8 на поверхностях пьезоэлектрического слоя 4 осуществляют в результате травления или 3-D печати.
Пьезоэлектрический слой 4 изготавливают из полимерной пленки PVDF или композиционного материала, например, армированного пьезоэлектрическими волокнами или монокристаллами ортогонально направлению встречно-штыревых электродов 5, 6 для увеличения гибкости и эффективного значения рабочего пьезоэлектрического модуля пьезоэлектрического слоя 4 в направлении армирования.
Двухсторонними стрелками на фиг. 1-2 обозначены рабочие направления «растяжения-сжатия», ортогональные встречно-штыревым электродам 5, 6, пьезоэлектрических ячеек 3.
Пьезоэлектрические ячейки 3 установливаются на обшивках 1, 2 лопасти (фиг.1) заданным оптимальным образом, например, с плотной тетрагональной укладкой ячеек 3 и заданными оптимальными значениями ориентационного угла α встречно-штыревых электродов внутри ячеек с учетом их мест расположений на обшивках 1, 2 лопасти и общего целевого назначения.
Пьезоэлектрические ячейки 3 приводятся в действие одновременно или независимо друг от друга при подключении к выходам их электродов 9, 10 одинакового общего значения или индивидуальных значений управляющего электрического напряжения Uупр.
На фиг. 1 пунктирной линией показано изменение геометрии (контура) аэродинамического профиля лопасти в виде поворота аэродинамического профиля (между обшивками 1, 2 лопасти) в результате подключения управляющего электрического напряжения Uупр к выходам электродов 9, 10 пьезоэлектрических ячеек 3.
Устройство работает следующим образом.
Пьезоэлектрические ячейки 3 устанавливаются на поверхностях обшивок 1, 2 лопасти наиболее плотным образом с минимальным расстоянием между ячейками 3, например, с тетрагональной укладкой (фиг.1). Совокупность значений ориентационного угла α ячеек задается из условия оптимальности достижения требуемого целевого результата – изменения геометрии аэродинамической поверхности лопасти (фиг.1).
При подключении к выходам электродов 9, 10 пьезоэлектрических ячеек 3 управляющего электрического напряжения Uупр осуществляются осевые деформации «растяжения-сжатия» ячеек 3 в своих рабочих направлениях (см. двойные стрелки на фиг.1-2), что обуславливает требуемое изменение геометрии аэродинамической поверхности, в частности, поворот аэродинамического профиля лопасти (см. пунктирный контур на фиг. 1) в результате изгибов и/или закручивания лопасти.
Достигаемый технический результат подтвержден численным моделированием управляемого деформирования закрылка лопасти с изменением аэродинамического профиля на основе решения задач электроупругости в приближении термоаналогии.
Преимущество изобретения состоит в том, что оно существенным образом расширяет возможности и повышает точность установки пьезоэлектрического актюатора с требуемой ориентацией встречно-штыревых электродов особенно вблизи контура обшивки и/или в окрестности соседних пьезоэлектрических актюаторов и, как следствие, существенно повышает эффект управления геометрией аэродинамической поверхности лопасти.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛОПАСТЬ ВОЗДУШНОГО ВИНТА С УПРАВЛЯЕМОЙ ГЕОМЕТРИЕЙ ПРОФИЛЯ | 2019 |
|
RU2723567C1 |
| ЛОПАСТЬ ВОЗДУШНОГО ВИНТА С УПРАВЛЯЕМОЙ ГЕОМЕТРИЕЙ ПРОФИЛЯ | 2018 |
|
RU2701416C1 |
| ПЬЕЗОАКТЮАТОР ИЗГИБНОГО ТИПА | 2024 |
|
RU2839714C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКТЮАТОР | 2024 |
|
RU2821960C1 |
| ПЬЕЗОАКТЮАТОР ИЗГИБНОГО ТИПА | 2024 |
|
RU2829016C1 |
| ЛОПАСТЬ ВОЗДУШНОГО ВИНТА С УПРАВЛЯЕМОЙ ГЕОМЕТРИЕЙ ПРОФИЛЯ | 2018 |
|
RU2697168C1 |
| ПЬЕЗОАКТЮАТОР ИЗГИБНОГО ТИПА | 2024 |
|
RU2822976C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКТЮАТОР | 2024 |
|
RU2821961C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКТЮАТОР | 2023 |
|
RU2818079C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПЬЕЗОЭЛЕКТРИЧЕСКОГО АКТЮАТОРА | 2023 |
|
RU2811420C1 |
Изобретение относится к области изготовления лопасти воздушного винта с управляемой геометрией аэродинамической поверхности. Лопасть содержит несущие упругие верхнюю и нижнюю обшивки лопасти, пьезоэлектрические приводы на верхней и/или нижней обшивках, выполненных в виде пленочных пьезоэлектрических актюаторов из пьезоэлектрического слоя со встречно-штыревыми поверхностными электродами с выходами для подключения к ним управляющего электрического напряжения. Пьезоэлектрические актюаторы выполнены в виде пьезоэлектрических ячеек с варьируемыми значениями ориентационного угла встречно-штыревых электродов к основанию ячейки, при этом пьезоэлектрические ячейки установлены на поверхностях обшивки с заданной ориентацией их встречно-штыревых электродов к основаниям ячеек и/или контура обшивки. Обеспечивается повышение эффекта (качества) управления геометрией аэродинамической поверхности лопасти посредством конструктивного расширения возможности и повышения точности установки пьезоэлектрического актюатора с требуемой ориентацией встречно-штыревых электродов вблизи контура обшивки и/или в окрестности соседних пьезоэлектрических актюаторов. 2 з.п. ф-лы, 2 ил.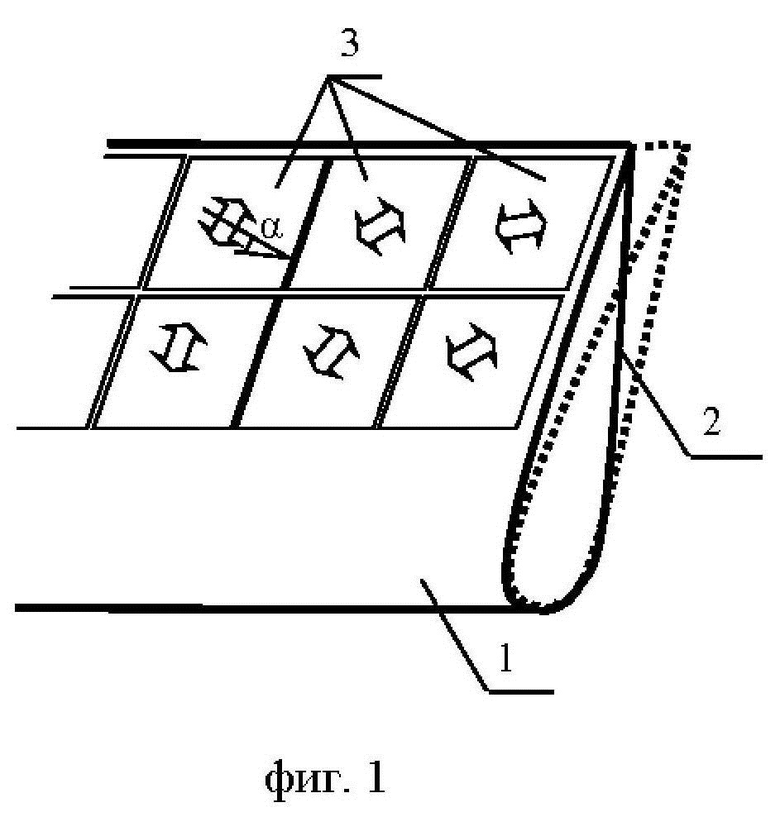
1. Лопасть воздушного винта с управляемой геометрией аэродинамической поверхности, содержащая несущие упругие верхнюю и нижнюю обшивки лопасти, пьезоэлектрические приводы на верхней и/или нижней обшивках, при этом пьезоэлектрические приводы выполнены в виде пленочных пьезоэлектрических актюаторов из пьезоэлектрического слоя со встречно-штыревыми поверхностными электродами с выходами для подключения к ним управляющего электрического напряжения, отличающаяся тем, что использованы пьезоэлектрические актюаторы в виде пьезоэлектрических ячеек с варьируемыми значениями ориентационного угла встречно-штыревых электродов к основанию ячейки, при этом пьезоэлектрические ячейки установлены на поверхностях обшивки с заданной ориентацией их встречно-штыревых электродов к основаниям ячеек и/или контура обшивки.
2. Лопасть воздушного винта по п. 1, отличающаяся тем, что пьезоэлектрические ячейки установлены на обшивке заданным оптимальным образом, например с плотной тетрагональной укладкой прямоугольных ячеек и заданными оптимальными ориентационными углами встречно-штыревых электродов внутри ячеек с учетом их мест расположений на обшивке и общего целевого назначения.
3. Лопасть воздушного винта по п. 1 или 2, отличающаяся тем, что пьезоэлектрические ячейки введены в действие одновременно или независимо друг от друга при подключении к выходам их электродов одинакового общего значения или индивидуальных значений управляющего электрического напряжения.
| ЛОПАСТЬ ВОЗДУШНОГО ВИНТА С УПРАВЛЯЕМОЙ ГЕОМЕТРИЕЙ ПРОФИЛЯ | 2018 |
|
RU2701416C1 |
| ЛОПАСТЬ ВОЗДУШНОГО ВИНТА С УПРАВЛЯЕМОЙ ГЕОМЕТРИЕЙ ПРОФИЛЯ | 2019 |
|
RU2723567C1 |
| ЛОПАСТЬ ВОЗДУШНОГО ВИНТА С УПРАВЛЯЕМОЙ ГЕОМЕТРИЕЙ ПРОФИЛЯ | 2018 |
|
RU2697168C1 |
| ПЬЕЗОАКТЮАТОР ИЗГИБНОГО ТИПА | 2024 |
|
RU2829016C1 |
| WO 2019083639 A1, 02.05.2019 | |||
| US 7632068 B2, 15.12.2009. | |||

