ПЕРЕКРЕСТНЫЕ ССЫЛКИ НА РОДСТВЕННЫЕ ЗАЯВКИ
[02] Данная заявка испрашивает приоритет предварительной заявки на патент США №62/611444, поданной 28 декабря 2017 г. Полное раскрытие предварительной заявки следует считать частью раскрытия прилагаемой заявки, и поэтому оно включено в данный документ посредством ссылки.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
1. Область техники, к которой относится изобретение
[03] Настоящее изобретение относится в целом к хирургическим системам, устройствам и способам, а конкретнее относится к устройству для использования в выполнении процедур хирургии минимального вмешательства (Minimally Invasive Surgery, MIS), которое обеспечивает возможность применения нескольких хирургических инструментов на операционном поле через один надрез.
2. Описание предшествующего уровня техники
[04] MIS становятся все более востребованными, поскольку этот класс хирургических процедур выполняют через несколько небольших надрезов на теле пациента, чтобы минимизировать повреждение тканей и потерю крови во время хирургической операции и хирургическую операцию через эти небольшие надрезы выполняют с помощью тонких и жестких инструментов, которые пропускают сквозь интродьюсер, вставленный в надрезы на операционном поле. Успех различных процедур MIS, связанный со снижением уровня болевых ощущений пациента и сокращением времени выздоровления, стимулировал тенденцию, направленную на разработку устройств и процедур, позволяющих выполнять менее инвазивные хирургические процедуры.
[05] В значительной мере причиной успеха процедур MIS являются достижения в разработке используемых инструментов. Вначале процедуры MIS выполняли с помощью небольшой эндоскопической камеры в одном надрезе и нескольких длинных тонких жестких инструментов, проходящих к операционному полю через другие надрезы. Многократно к операционному полю нагнетается воздух для предоставления хирургу большего пространства для маневрирования инструментами. В качестве примера, во время типичной процедуры лапароскопической холецистэктомии (удаления желчного пузыря) в брюшную полость вводят иглу и в брюшную полость поддувают, закачивая в брюшную полость газ CO2. После наполнением воздухом брюшной полости в брюшную полость вводят эндоскопическую камеру через интродьюсер, вставленный в надрез вокруг области пупка, благодаря чему хирург может видеть операционное поле. Затем в брюшную полость вводят дополнительные инструменты через интродьюсеры, вставленные в надрезы, которые сделаны с правой и левой стороны от эндоскопического надреза. Инструменты имеют вид длинного и жесткого стержня с хирургическим инструментом, таким как хирургические щипцы или ножницы, прикрепленные к дистальному концу стержня, и рукоятку с органами управления для манипулирования хирургическим инструментом, прикрепленными к проксимальному концу инструмента. Хирург позиционирует хирургический инструмент путем захвата рукоятки так, чтобы в дальнейшем вставлять или извлекать инструмент, или менять угловое сближение инструмента. Внутри стержня обеспечены механические соединения, чтобы хирург мог управлять хирургическим инструментом на дистальном конце инструмента с помощью органов управления, присутствующих на рукоятке. Возвращаясь к примеру, хирург может вставлять необходимые инструменты через надрезы, извлекать инструменты, которые больше не нужны, для замены другими инструментами для вырезания желчного пузыря из его окружающих тканей, закрытия кровеносных сосудов и извлечения желчного пузыря из брюшной полости.
[06] Несмотря на преимущества, предоставляемые процедурами MIS, такими как снижение уровня болевых ощущений пациента и сокращение времени выздоровления, данная методика содержит определенные неудобства для хирурга. Первый недостаток состоит в том, что, поскольку инструменты длинные и жесткие, только с большими сложностями и терпением можно пропускать через надрезы более чем один инструмент. В результате требуются дополнительные надрезы, что причиняет пациенту больше боли и травм и увеличивает время его выздоровления. Второй недостаток состоит в сложности надлежащего манипулирования достаточно несоразмерно длинными и жесткими инструментами через «глаз» лапароскопа и образование проблемы координации рук и глаз хирурга. Эта проблема усугубляется во время длительных операций по мере того как в руках хирурга накапливается усталость.
[07] Чтобы избежать этих и других недостатков, хирурги начали заменять инструменты для работы руками системами MIS первого поколения, базирующимися на комплекте роботов-манипуляторов, управляемых компьютером, которым управляет хирург через человеко-машинный интерфейс (Human Machine Interface, HMI). HMI представляет собой компонент системы, который способен обрабатывать взаимодействие между человеком и машиной. Интерфейс состоит из аппаратного обеспечения и программного обеспечения, позволяющего преобразовывать пользовательский ввод в сигналы для машин, которые, в свою очередь, обеспечивают пользователю нужный результат. Таким образом, хирург может выполнять хирургическую операцию удаленно от пациента на консоли, используя жесты рук и пальцев, которые преобразуются в сигналы, управляющие роботами-манипуляторами, удерживающими инструменты и хирургические инструменты, находящиеся на дистальном конце инструмента. Это уменьшает проблемы с координацией рук и глаз хирурга, поскольку HMI может компенсировать пространственные различия между жестами рук и пальцев хирурга и положением и действиями хирургического инструмента на конце инструментов, а также снизить степень утомления, испытываемого хирургом во время длительных или более сложных операций.
[08] Более новые системы MIS второго поколения сфокусировались на ряде улучшений по сравнению с системами первого поколения. Эти улучшения включают, среди прочего, увеличенное количество инструментов, которые можно ввести через один надрез, автоматизацию извлечения инструментов из брюшной полости и автоматизацию процесса замены хирургического инструмента, прикрепленного к дистальному концу инструмента. Хирургическое устройство в соответствии с настоящим изобретением имеет такую конструкцию, которая позволяет максимально увеличить количество инструментов, которые можно ввести в брюшную полость через один надрез, автоматизирует извлечение этих инструментов из брюшной полости и обеспечивает возможность автоматической замены хирургического инструмента на дистальном конце по меньшей мере одного инструмента.
[09] Пример системы MIS второго поколения указан в патентной публикации США 2005/0096502, автор Теодор Халили (Theodore Khalili). В описании Халили представлено роботизированное хирургическое устройство, выполненное с возможностью выполнения процедур MIS при наличии только одного надреза. Роботизированное хирургическое устройство содержит удлиненный корпус для вставки в тело пациента через небольшой надрез, содержащий множество роботов-манипуляторов, размещаемых в брюшной полости для хирургических целей. На дистальной части удлиненного корпуса или на одном из роботов-манипуляторов может быть размещен детектор изображения для предоставления оператору устройства визуальной обратной связи. В другом варианте каждый из роботов-манипуляторов содержит два или более соединений, позволяющих оператору координировано маневрировать роботами-манипуляторами в зоне вокруг дистального конца устройства. Однако в описании Халили в брюшную полость можно ввести только три робота-манипулятора. В качестве функции роботу-манипулятору в первую очередь добавили степени свободы, поэтому для обеспечения добавленной функции нужно увеличить диаметр манипулятора. Учитывая, что целесообразно делать надрез как можно меньшим, каждая добавленная функция приводит к тому, что манипулятор занимает все большую часть пространства, обеспечиваемого надрезом; фактически ограничивая количество роботов-манипуляторов, которые могут пройти через надрез. Здесь все роботы-манипуляторы обладают одинаковой функцией, их диаметры равны и через надрез могут пройти только три. В дополнение манипуляторы согласно описанию Халили должны быть вручную извлечены из брюшной полости, как показано на фиг. 5, где три отдельных робота-манипулятора, 84, 86, и 88 должны вставляться пользователем в брюшную полость через установочную трубку 82 путем проталкивания вручную роботов-манипуляторов через установочную трубку. Наконец, хирургический инструмент нужно заменять вручную, как показано на фиг.6 в описании Халили, где дистальный конец 102 отдельного робота-манипулятора может содержать переходник для замены, так что хирург может подсоединять разные хирургические инструменты 104 к роботу-манипулятору, исходя из конкретной потребности подлежащей выполнению хирургической операции.
[010] Другой пример системы MIS второго поколения указан в патентной публикации США 2014/0309659, авторы Се Гон Ро (Se Gon Roh) и другие. Ро раскрывает хирургическое устройство, содержащее множество роботов-манипуляторов, предназначенных для выполнения хирургической операции на операционном поле в брюшной полости. Роботы-манипуляторы содержат хирургические регуляторы положения для перемещения манипуляторов из одного порта на первое операционное поле. Однопортовый хирургический робот может эффективно выполнять одновременные хирургические операции в различных хирургических областях, как и в случае многопортовой хирургии. Ро раскрывает хирургическое устройство, предназначенное для введения нескольких роботов-манипуляторов, четырех, в брюшную полость через один надрез. В описании Ро в брюшную полость можно ввести только четыре робота-манипулятора. В качестве функции роботу-манипулятору в первую очередь добавили степени свободы, поэтому для обеспечения добавленной функции нужно увеличить диаметр манипулятора. Учитывая, что целесообразно делать надрез как можно меньшим, каждая добавленная функция приводит к тому, что манипулятор занимает все большую часть пространства, обеспечиваемого надрезом; фактически ограничивая количество роботов-манипуляторов, которые могут пройти через надрез. Здесь все роботы-манипуляторы обладают одинаковой функцией, их диаметры равны и через надрез могут пройти только четыре. Хотя манипуляторы устройства Ро имеют большое количество степеней свободы, после их введения в брюшную полость невозможно извлечь только один манипулятор для замены хирургического инструмента на его дистальном конце. Все четыре манипулятора вводят как одну группу, и извлекать из брюшной полости их необходимо как одну группу. Невозможно выполнять процедуру MIS, для которой требуется более четырех инструментов, предусмотренных в описании Ро, и если разные операционные поля требуют разного комплекта инструментов, все устройство нужно извлекать из брюшной полости, прерывая хирургическую операцию.
[011] Как рассматривалось выше, процедуры MIS являются предпочтительными, поскольку более маленькие надрезы на теле пациента минимизируют повреждение тканей и потерю крови во время хирургической операции, уменьшается уровень боли, испытываемой пациентами, и сокращается промежуток времени, требуемого для выздоровления. В результате хирурги заинтересованы в усовершенствовании процедур MIS, чтобы требовался только один надрез, также называемый одним портом, и чтобы несколько роботов-манипуляторов могли пройти через один надрез, для дальнейшего сокращения степени повреждения тканей и потери крови во время хирургической операции. В известном уровне техники раскрыты хирургические устройства с несколькими роботами-манипуляторами, проходящими через один порт. Однако в известном уровне техники не раскрыты ни автоматизированные средства для извлечения одного из нескольких роботов-манипуляторов, ни автоматизированные средства для замены хирургического инструмента на дистальном конце робота-манипулятора. В дополнение в известном уровне техники каждому манипулятору предоставлена одинаковая функция, а для этого требуется, чтобы каждый манипулятор обладал одинаковой сложностью и диаметром, пропорциональным функции манипулятора. Важно поддерживать минимальный диаметр роботов-манипуляторов, чтобы большее количество манипуляторов могло проходить через надрез, однако предоставление одинаковой функции всем манипуляторам увеличивает стоимость хирургического устройства и ограничивает количество манипуляторов, которые могут одновременно проходить через надрез. Хирургическое устройство согласно настоящему изобретению направлено на решение этих проблем.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[012] В данном документе описано хирургическое устройство для размещения и использования нескольких роботов-манипуляторов с различными возможностями в теле пациента через один надрез. Обычно один главный манипулятор будет обладать определенными возможностями; такими как дополнительные степени свободы, мощность и автономная замена прикрепленного хирургического инструмента; которых нет у остальных манипуляторов, однако диаметр такого манипулятора больше, чем у остальных манипуляторов с меньшими возможностями. В предпочтительном варианте осуществления устройство содержит один главный манипулятор и четыре вспомогательных манипулятора вместе с механизмами для управления манипуляторами, чтобы они могли подниматься, опускаться, вращаться и управляться иным образом сигналами, генерируемыми компьютером, которым управляет хирург. Манипуляторы состоят из нескольких цилиндрических сегментов, причем первый сегмент, расположенный рядом с устройством, является самым длинным и в основном находится за пределами тела. Остальные цилиндрические сегменты намного короче и предназначены для работы внутри тела пациента. Наконец, на дистальном конце каждого манипулятора находится хирургический инструмент, такой как, но без ограничения, прозекторы, камеры, осветители, зажимы, ножницы (с функцией прижигания и без функции прижигания), сшиватели, иглодержатели, электрокаутеризационные крючки, ретракторы, клипсонакладыватели, прибор для прижигания или ирригационные трубки. Хирургический инструмент на главном манипуляторе может быть автономно заменен любым из ряда инструментов, имеющихся на карусели, находящейся на хирургическом устройстве, тогда как хирургический инструмент на любом из вспомогательных манипуляторов может быть заменен путем автономного подъема манипулятора для выведения наружу хирургического инструмента, так что его может вручную заменить хирург.
[013] В известном уровне техники все роботы-манипуляторы одинаковы по размеру, степеням свободы, автономному управлению, энергопотреблению и мощности приводов и сервомеханизмов. Однако понятно, что некоторые хирургические инструменты, такие как камеры или осветители, не нуждаются настолько в автономном управлении, как другой хирургический инструмент, такой как прозекторы или ножницы. Таким образом, если уменьшить степень сложности или мощность манипулятора, диаметр манипулятора можно минимизировать и большее количество таких манипуляторов, называемых вспомогательными манипуляторами, могут проходить через один надрез. Наоборот, если увеличить степень сложности или мощность манипулятора, диаметр манипулятора также увеличится и ограничит количество таких манипуляторов, называемых главными манипуляторами, которые могут пройти через один надрез. Преимущественным является предоставление возможности хирургу выбирать возможности манипуляторов в соответствии с потребностями процедуры. В определенных процедурах хирург может найти полезным использование множества вспомогательных манипуляторов и только одного главного манипулятора. Для других процедур будет полезно использование нескольких главных манипуляторов и только одного вспомогательного манипулятора. Как рассматривалось выше, главный манипулятор хирургического устройства в соответствии с настоящим изобретением наделен дополнительными возможностями, которых нет у вспомогательных манипуляторов, и в конечном итоге он будет иметь больший диаметр, чем диаметр вспомогательных манипуляторов. Главный манипулятор имеет больше степеней свободы, может содержать большие приводы и двигатели и может автономно заменять инструмент, находящийся на его дистальном конце, другим инструментом. Вспомогательные манипуляторы более ограничены в их диапазоне движений, им не хватает мощности главного манипулятора, и инструмент, находящийся на его дистальном конце, нужно заменять вручную. Главный манипулятор, имеющий больший диаметр, можно использовать для удаления частей тела, которые были вырезаны из тела пациента.
[014] Как главный, так и вспомогательные манипуляторы можно поднимать, опускать или вращать механизмами, работающими на манипуляторах за пределами тела пациента. Дополнительно главный манипулятор взаимодействует с вращающейся каруселью, содержащей несколько захватов, причем каждый захват способен удерживать хирургический инструмент, который используется главным манипулятором. Когда хирургический инструмент, в настоящий момент прикрепленный к главному манипулятору, расположен с возможностью взаимодействия с каруселью, он может быть заменен хирургическим инструментом, находящимся на карусели. Для замены инструмента, прикрепленного к вспомогательному манипулятору, хирург извлечет вспомогательный манипулятор из тела пациента и вручную заменит инструмент нужным инструментом. Замена хирургического инструмента главного или вспомогательного манипулятора не требует обязательного извлечения из операционного поля каких-либо других оставшихся манипуляторов.
[015] Хирургическое устройство подлежит контролю компьютерной системой, которая обеспечит подачу соответствующего питания и сигналов на различные механизмы в ответ на вводы, полученные HMI от хирурга. Для преобразования человеческих жестов, выполняемых хирургом, в сигналы, направляемые компьютерной системой к различным механизмам, может использоваться любое количество HMI. Компьютерная система и связанный с ней человеко-машинный интерфейс не являются частью настоящего изобретения.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
[016] Настоящее изобретение станет более понятным из подробного описания и сопроводительных графических материалов, на которых:
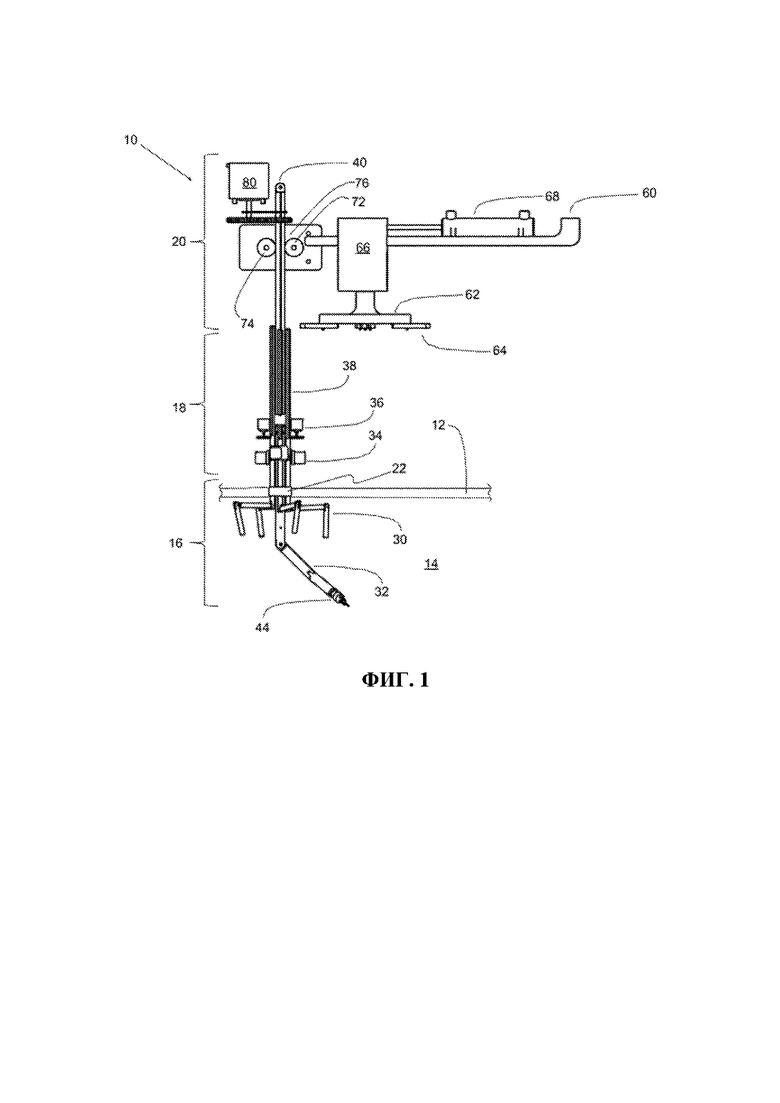
[017] на фиг. 1 показан вид сбоку хирургического устройства согласно настоящему изобретению;
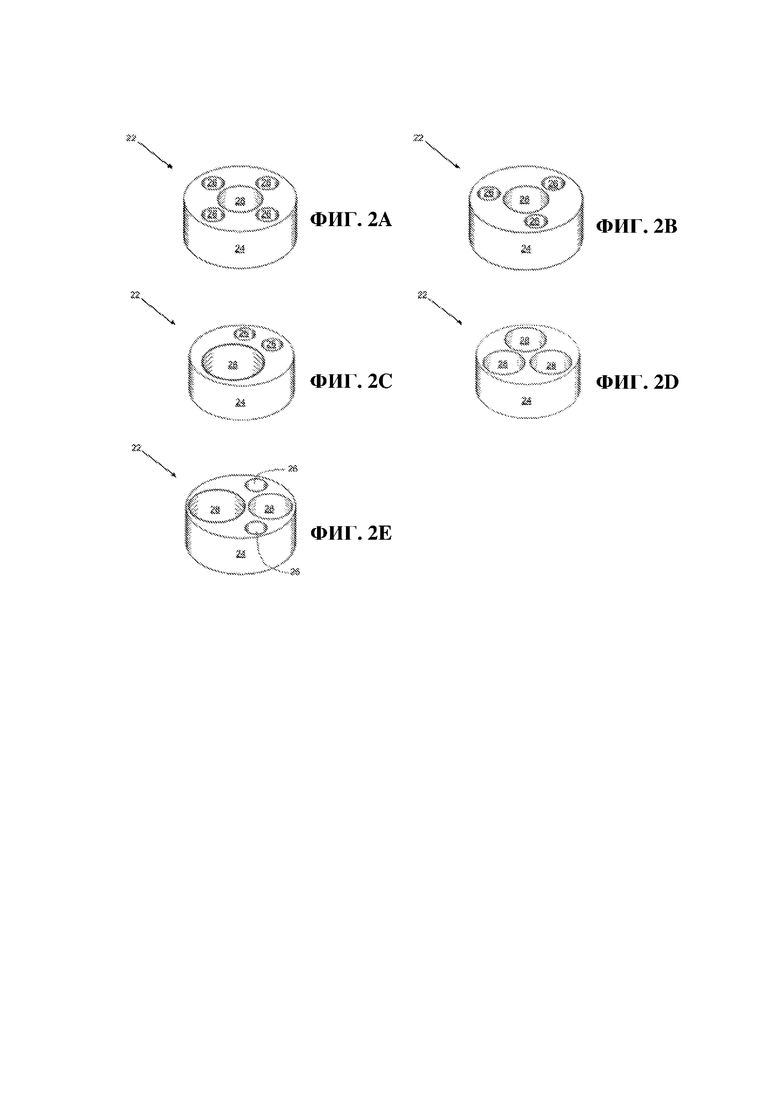
[018] на фиг. 2А показан изометрический вид предпочтительного варианта осуществления интродьюсера, содержащего одно большее отверстие для главного манипулятора и четыре меньших отверстия для вспомогательных манипуляторов;
[019] на фиг. 2В показан изометрический вид альтернативного варианта осуществления интродьюсера, содержащего одно большее отверстие для главного манипулятора и три меньших отверстия для вспомогательных манипуляторов;
[020] на фиг. 2С показан изометрический вид альтернативного варианта осуществления интродьюсера, содержащего одно большее отверстие для главного манипулятора и два меньших отверстия для вспомогательных манипуляторов;
[021] на фиг. 2D показан изометрический вид альтернативного варианта осуществления интродьюсера, содержащего три больших отверстия для размещения трех главных манипуляторов;
[022] на фиг. 2Е показан изометрический вид альтернативного варианта осуществления интродьюсера, содержащего два больших отверстия с переменным диаметром для размещения двух главных манипуляторов и два меньших отверстия для вспомогательных манипуляторов;
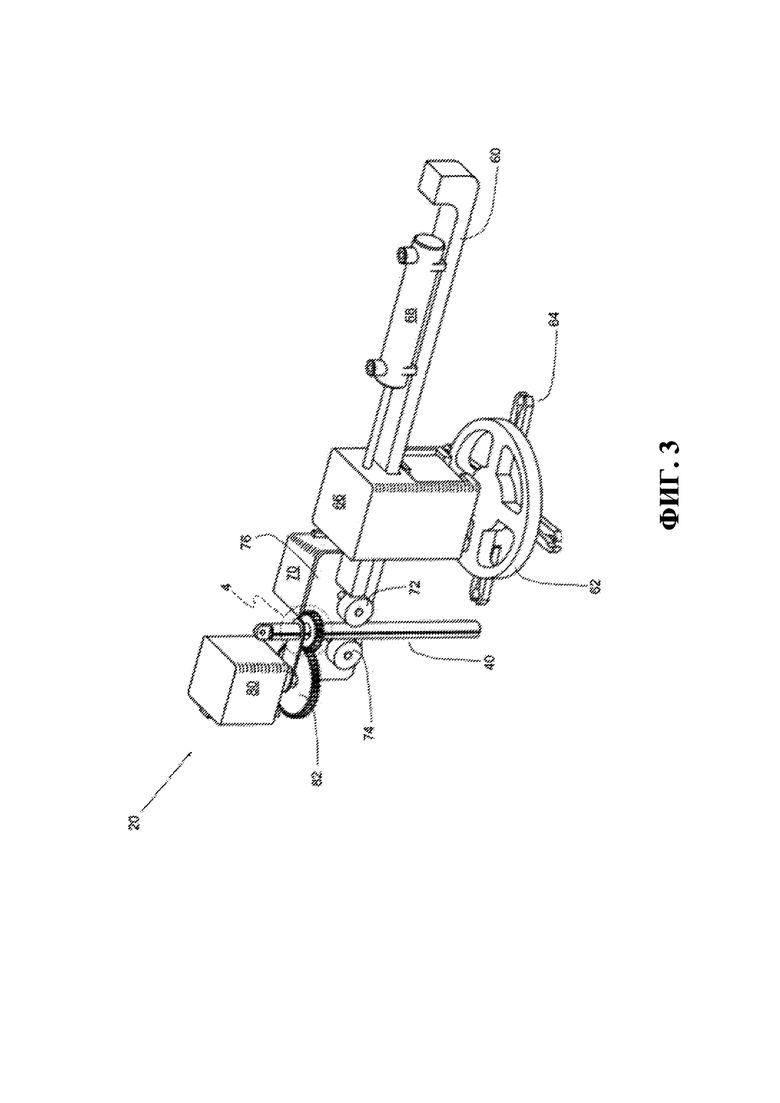
[023] на фиг. 3 показан изометрический вид верхней части хирургического устройства;
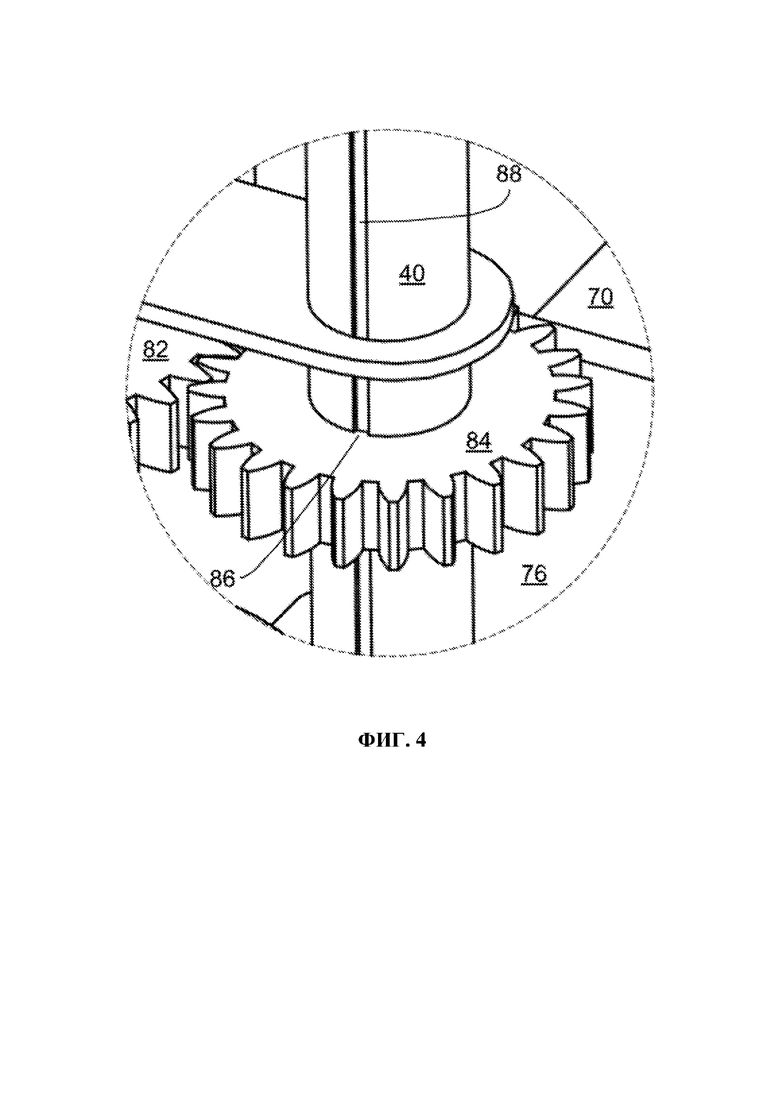
[024] на фиг. 4 показан подробный вид ключа и шпоночного паза, используемых для вращения главного манипулятора;
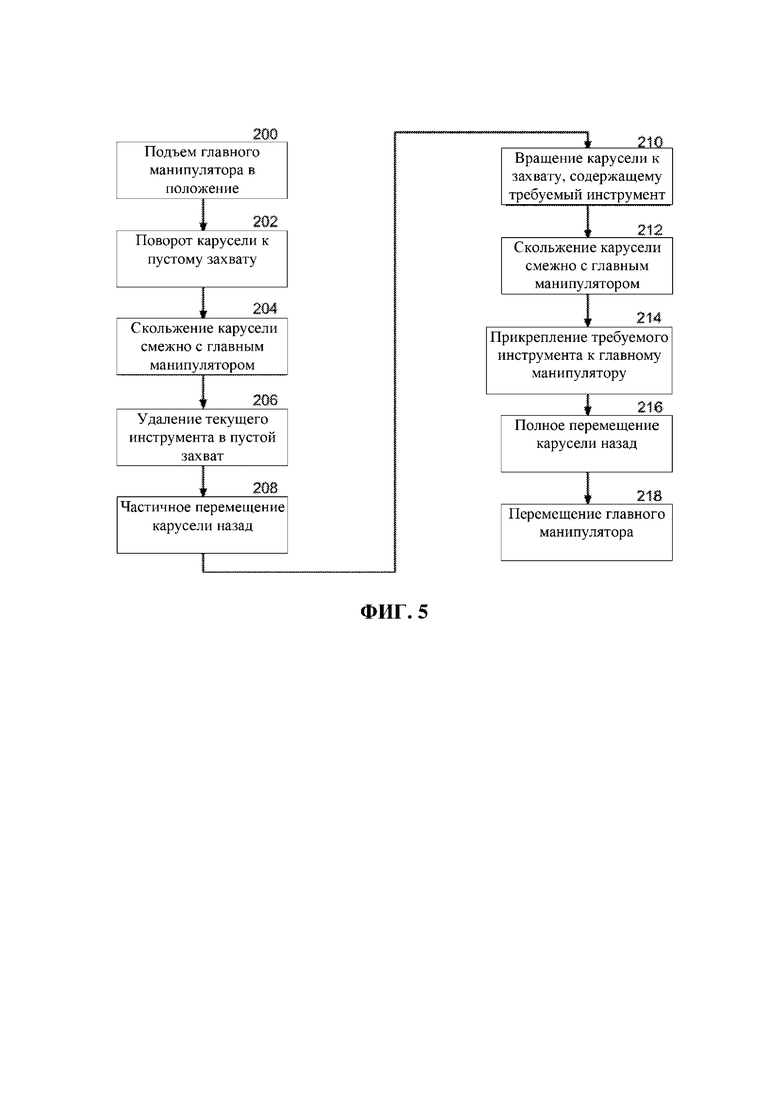
[025] на фиг. 5 показана блок-схема, отображающая процесс, используемый хирургическим устройством для замены инструмента на главном манипуляторе инструментом, имеющимся на карусели;
[026] на фиг. 6 показан вид сверху хирургического устройства;
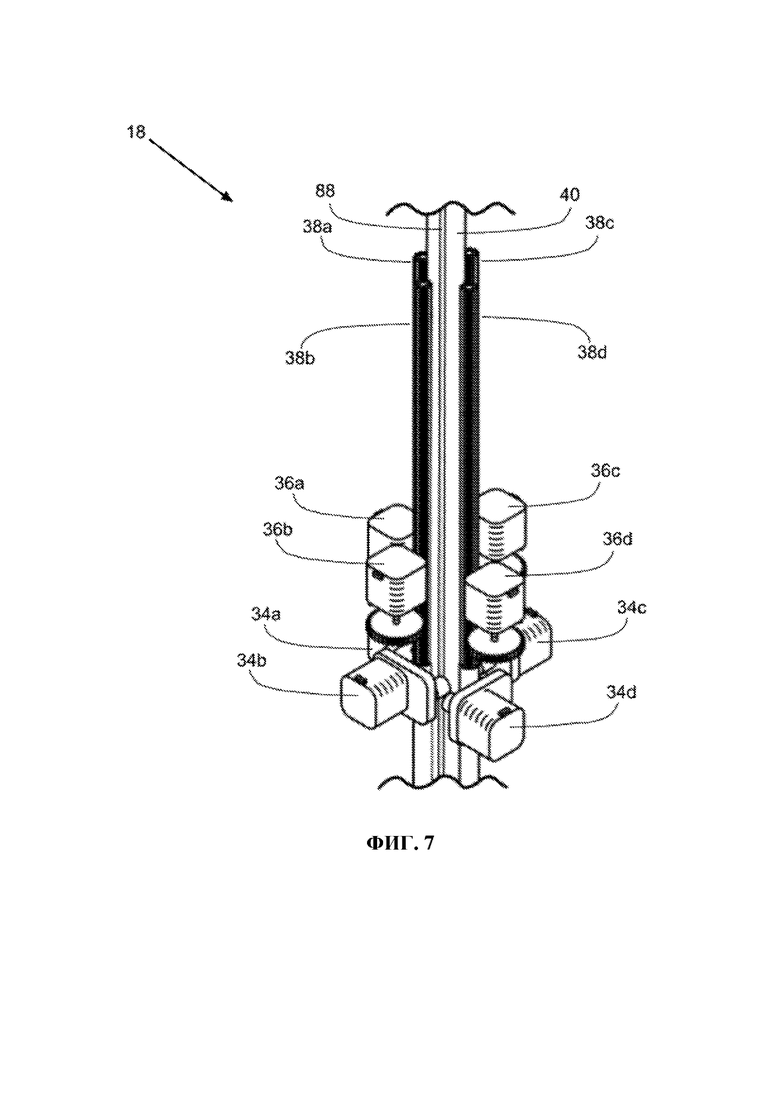
[027] на фиг. 7 показан изометрический вид средней части хирургического устройства;
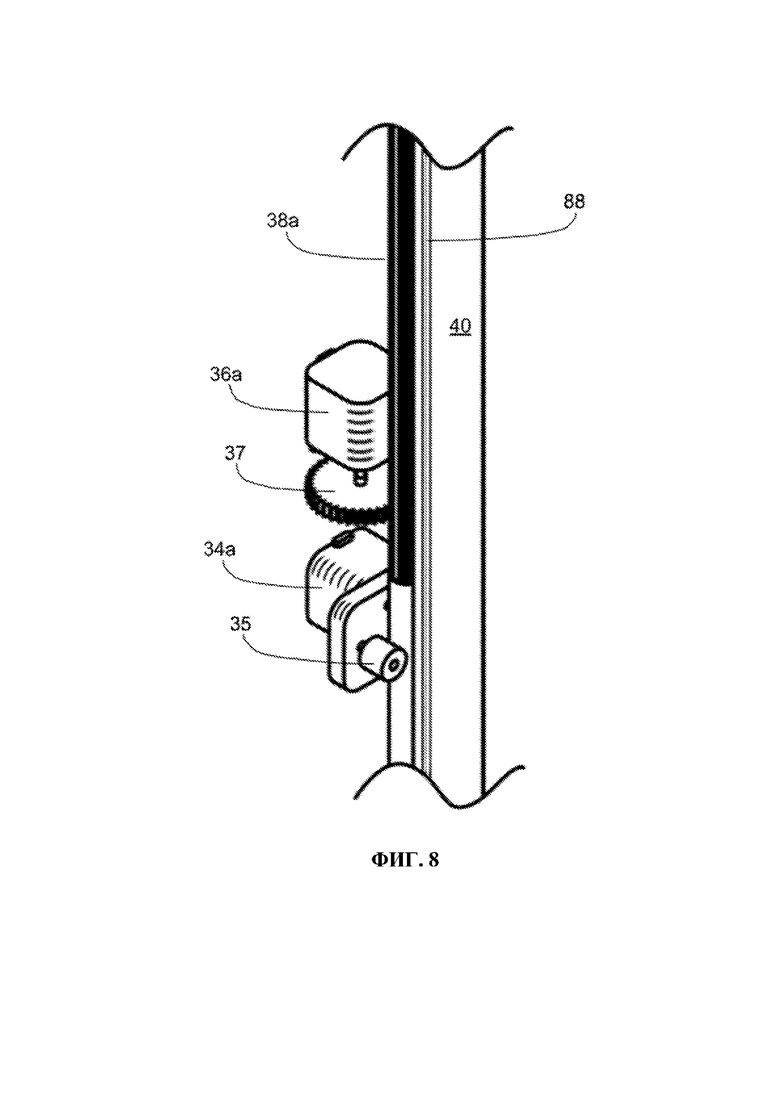
[028] на фиг. 8 показан изометрический вид средней части с удаленными всеми вспомогательными манипуляторами кроме одного для описания механизмов подъема, опускания или вращения вспомогательного манипулятора;
[029] на фиг. 9 показан изометрический вид нижней части хирургического устройства;
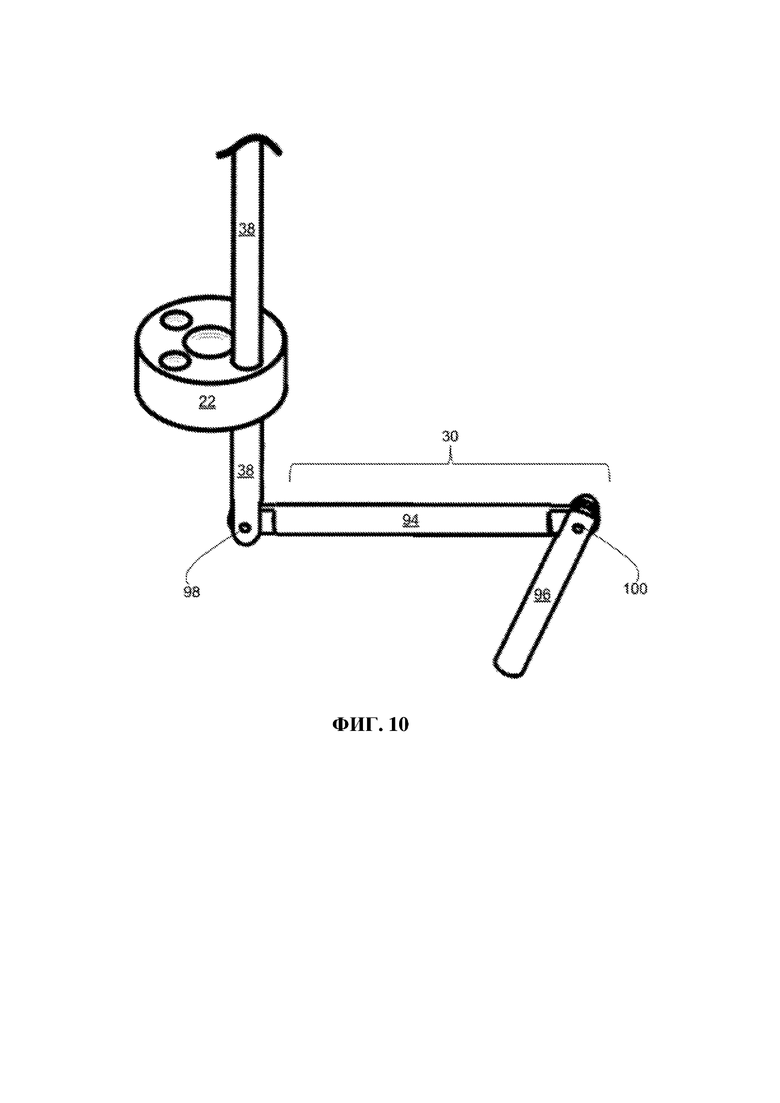
[030] на фиг. 10 показан изометрический вид одного вспомогательного манипулятора, проходящего через интродьюсер;
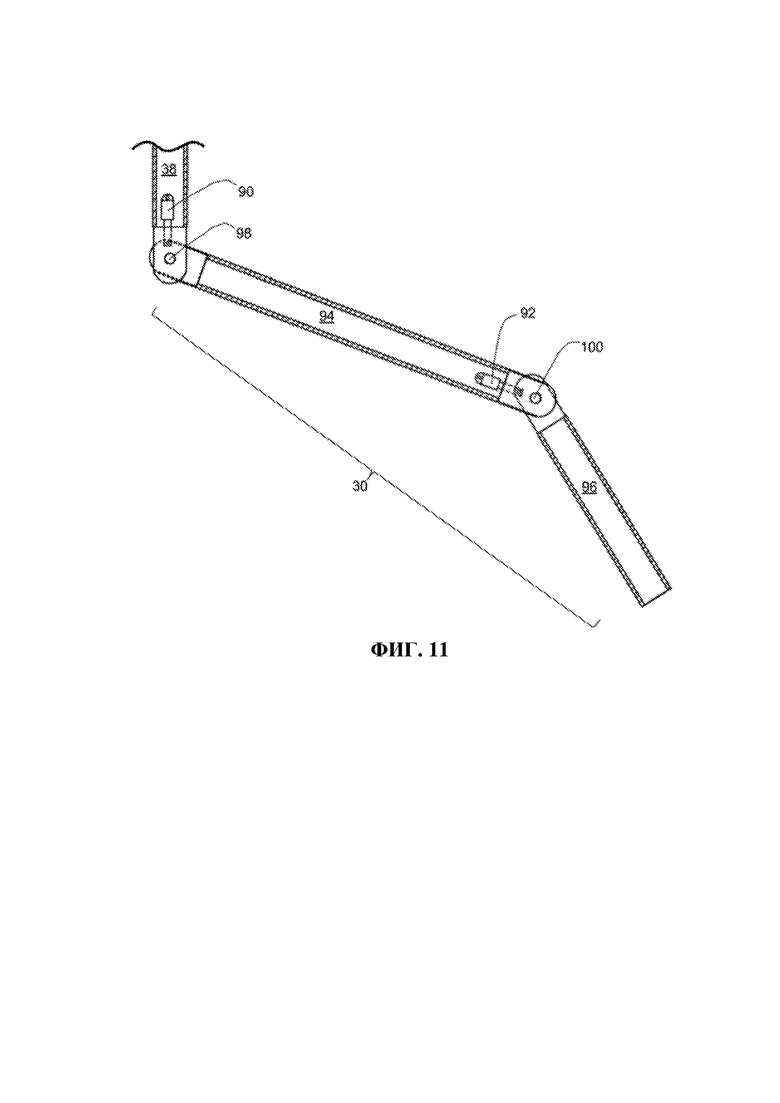
[031] на фиг. 11 показан вид в разрезе вспомогательного манипулятора, чтобы продемонстрировать механизмы, манипулирующие манипулятором;
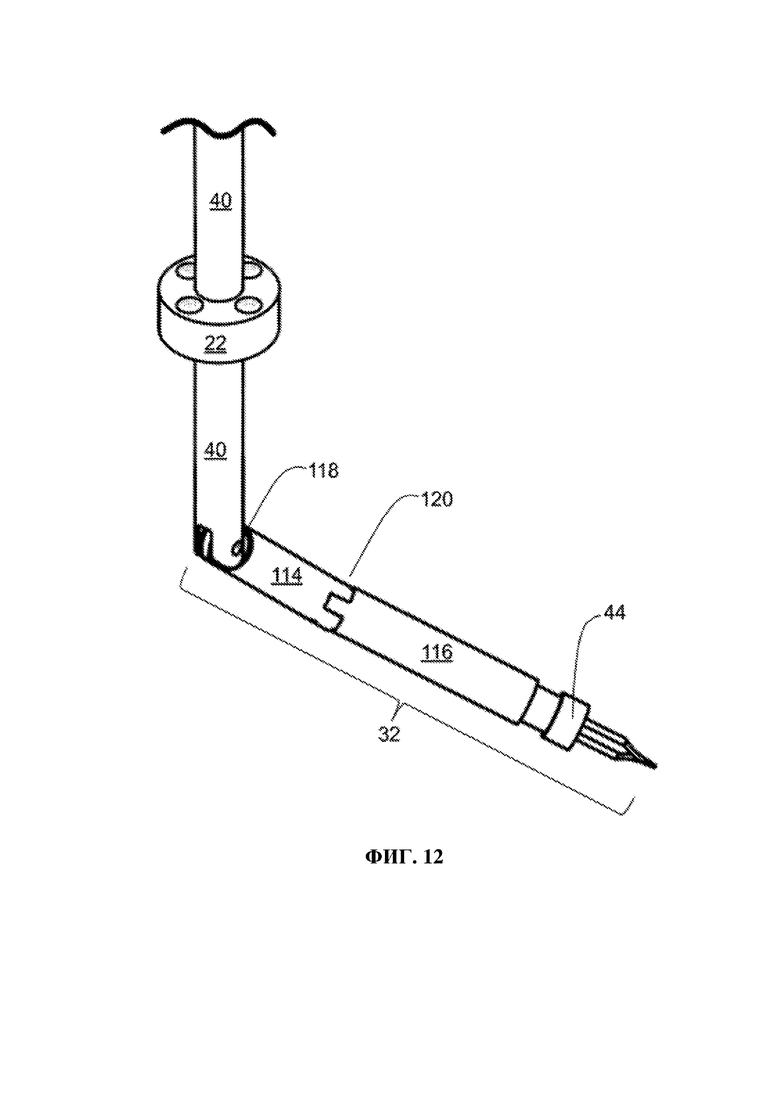
[032] на фиг. 12 показан изометрический вид главного манипулятора, проходящего через интродьюсер;
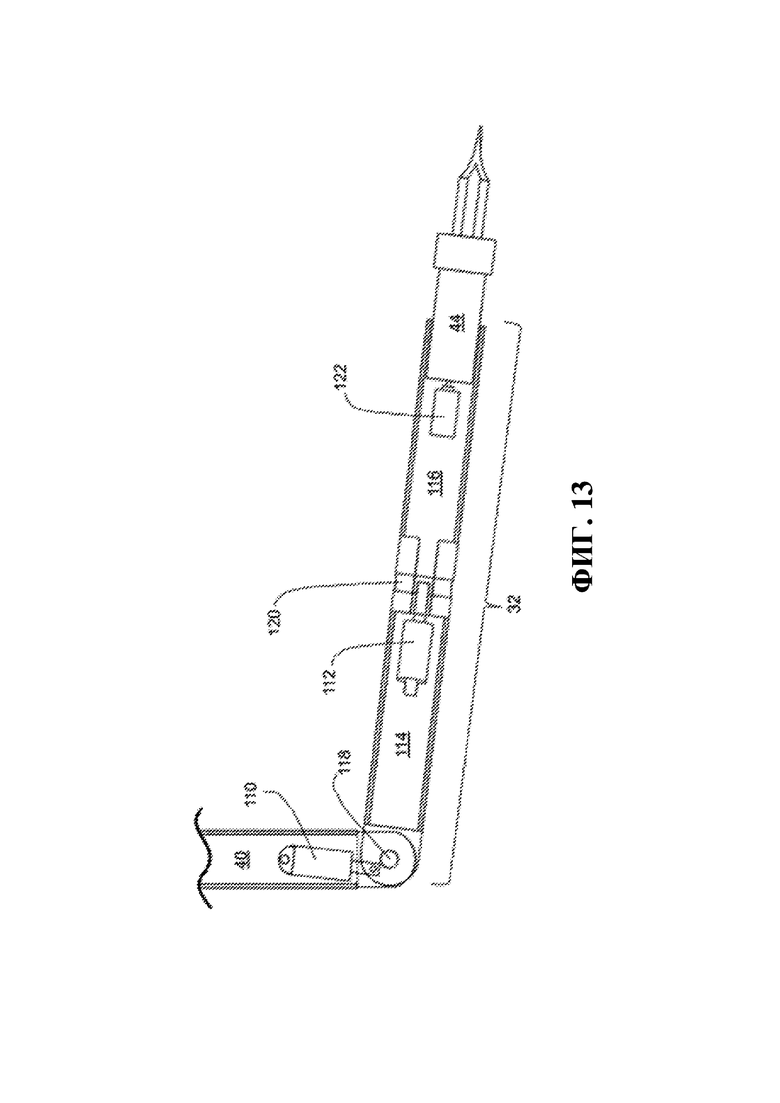
[033] на фиг. 13 показан вид в разрезе главного манипулятора, чтобы продемонстрировать механизмы, манипулирующие манипулятором;
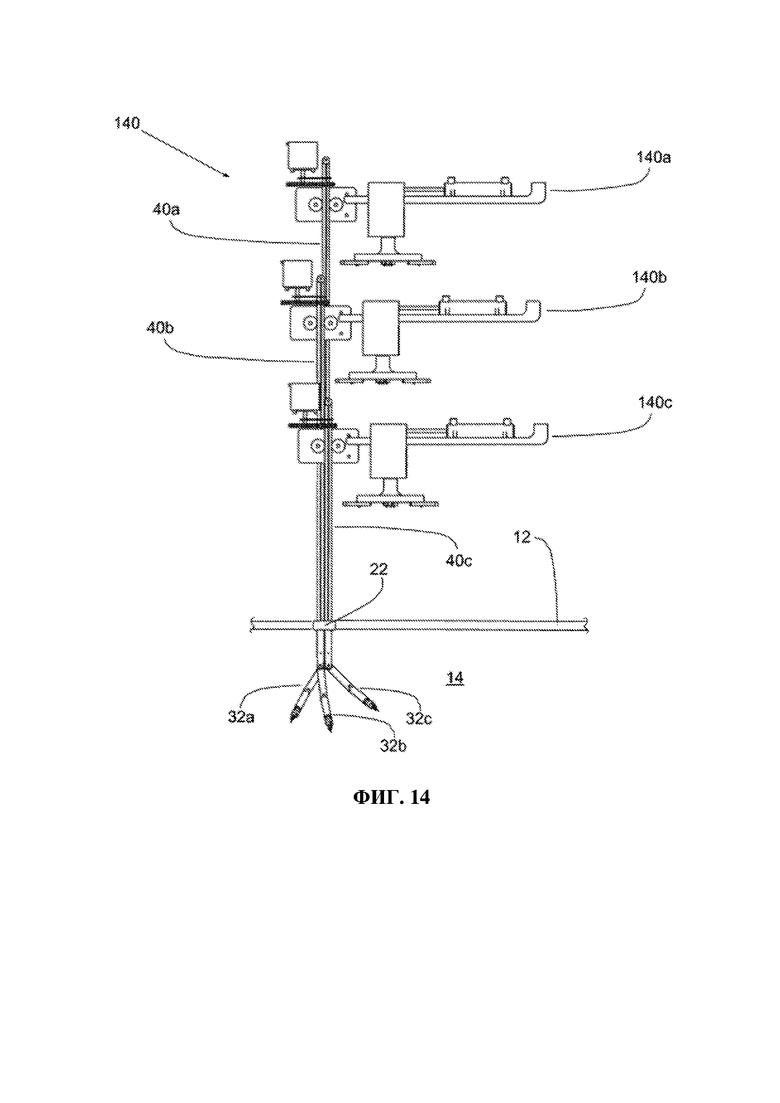
[034] на фиг. 14 показан вариант осуществления, содержащий комбинацию хирургического устройства согласно настоящему изобретению;
[035] на фиг. 15 показан альтернативный вариант осуществления хирургического устройства согласно настоящему изобретению;
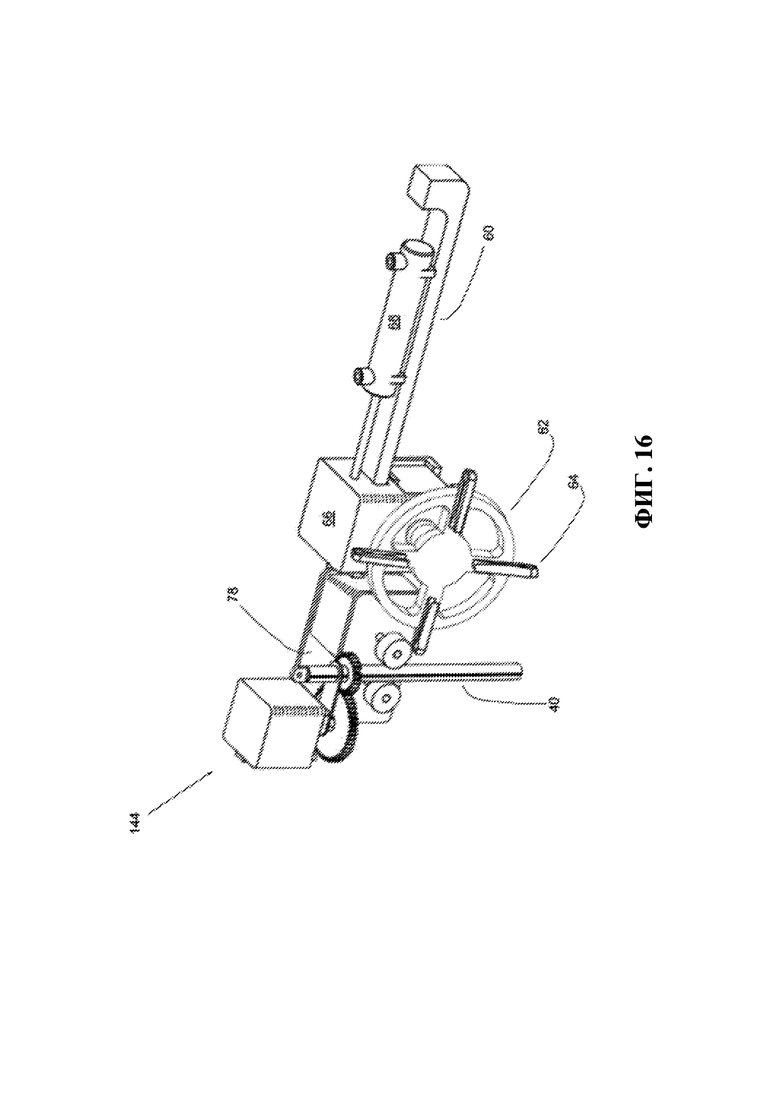
[036] на фиг. 16 показан альтернативный вариант осуществления хирургического устройства согласно настоящему изобретению;
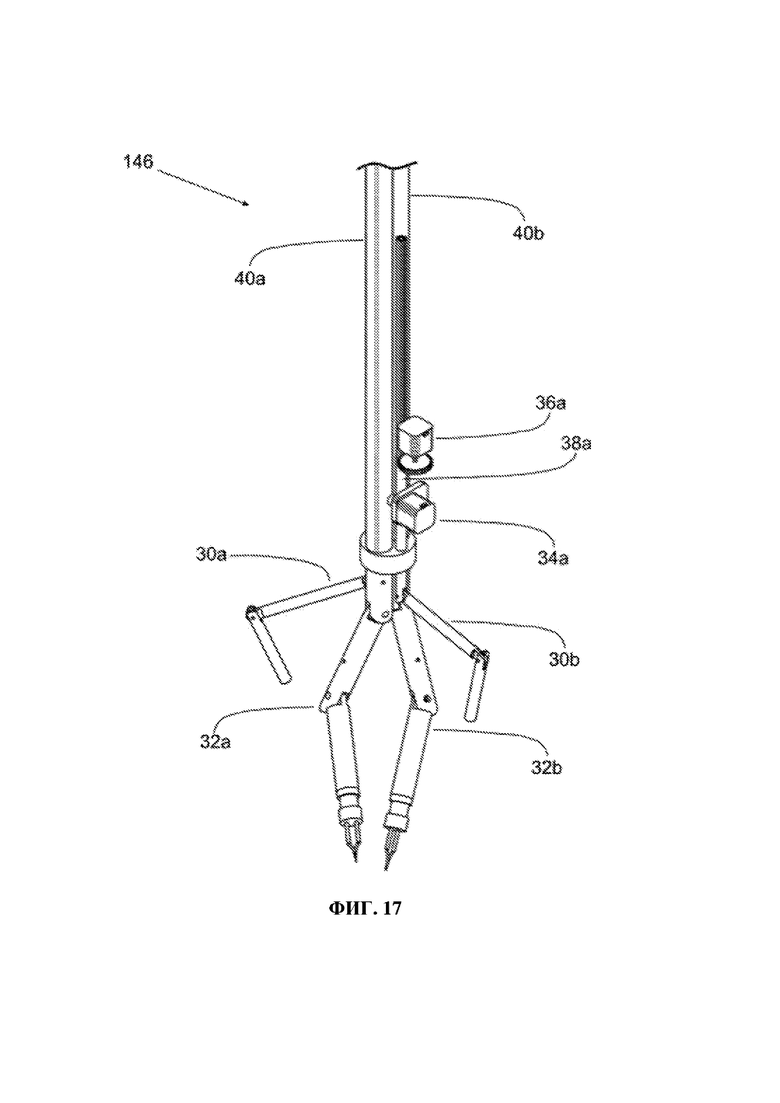
[037] на фиг. 17 показан альтернативный вариант осуществления хирургического устройства согласно настоящему изобретению.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[038] Следующее описание предпочтительного варианта осуществления (предпочтительных вариантов осуществления) носит исключительно иллюстративный характер и никоим образом не предназначено для ограничения настоящего изобретения, его применения или использований.
[039] На фиг. 1 показан вид сбоку предпочтительного варианта осуществления хирургического устройства 10 с его удаленным внешним корпусом, чтобы открыть элементы и механизмы, находящиеся внутри корпуса. В дополнение на фиг. 1 также показана стенка 12 брюшной полости пациента, который в данный момент подвергается операции, причем нижняя часть 16 хирургического устройства 10 находится по большей части внутри брюшной полости 14. Корпус хирургического устройства, который не показан, содержит верхнюю часть 20 и среднюю часть 18 и не проходит в брюшную полость 14, так что вспомогательные манипуляторы 30, а также главный манипулятор 32 имеют свободу маневра в брюшной полости 14. Вспомогательные манипуляторы 30 прикреплены к цилиндрическим вторичным валам 38, а главный манипулятор 32 прикреплен к цилиндрическому главному валу 40. Проксимальный конец как главного вала 40, так и вторичного вала 38 является концом, наиболее удаленным от брюшной полости 14, причем дистальный конец является тем концом, который наиболее приближен к брюшной полости 14. Проксимальный конец главного манипулятора 32 является концом, прикрепленным к дистальному концу главного вала 40, тогда как дистальный конец главного манипулятора 32 является концом, удерживающим хирургический инструмент ("инструмент"). Проксимальный конец вспомогательных манипуляторов 30 является концом, прикрепленным к дистальному концу вторичного вала 38 тогда как дистальный конец вспомогательных манипуляторов 30 является концом, удерживающим инструмент. Эти валы можно поднимать из брюшной полости 14 или опускать в нее, а также вращать относительно их продольной оси, независимо друг от друга. В предпочтительном варианте осуществления все пять валов проходят через интродьюсер 22, как показано на фиг .2А. Интродьюсер 22 содержит диск 24 с пятью отверстиями: четыре отверстия 26 для вспомогательных манипуляторов 30 и одно отверстие 28 для главного манипулятора 32. Отверстия 26 для вспомогательных манипуляторов расположены по краю диска 24 и находятся на расстоянии вокруг отверстия 28 главного манипулятора. Альтернативные варианты осуществления интродьюсера 22 показаны на фиг. 2В-фиг. 2Е, где количество отверстий варьируется от пяти, которые имеются в предпочтительном варианте осуществления по фиг. 2А.
[040] Главный вал 40 и вторичные валы 38 одинаковы в том, что все они имеют цилиндрическую форму и в них используется фрикционное колесо, прикрепленное к двигателю, для подъема и опускания вала. Однако для вращения двух валов используются разные механизмы. Для вращения главного вала 40 шестерня с ключом стыкуется со шпоночным пазом, расположенным вдоль продольной оси главного вала 40, как показано на фиг. 3 и фиг. 4. Вращение шестерни в свою очередь приведет к вращению главного вала 40. Что касается вторичных валов 38, то поверхность проксимальной половины содержит компоновку шлицевых соединений, взаимодействующих с шестерней. Вращение шестерни в свою очередь приведет к вращению вторичных валов 38, как показано на фиг. 7 и фиг.8.
[041] Главный манипулятор 32 и вспомогательные манипуляторы 30 схожи в том, что все они содержат два цилиндрических сегмента, соединенных вместе на шарнирах. Проксимальный конец манипулятора шарнирно соединен с дистальным концом вала, а дистальный конец манипулятора прикреплен к инструменту. Вспомогательные манипуляторы 30 отличаются от главного манипулятора 32 рядом характеристик. Наиболее существенная разница состоит в том, что хирургическое устройство 10 способно автономно заменять инструмент, прикрепленный к дистальному концу главного манипулятора 32, тогда как инструмент, прикрепленный к дистальному концу вспомогательных манипуляторов 30, нужно менять вручную. Процесс автономной замены инструмента, прикрепленного к дистальному концу главного манипулятора 32, описан на фиг. 5. Для ручной замены инструмента на вспомогательном манипуляторе связанный с ним вал поднимают, чтобы обнажить инструмент. Хирург, теперь имея доступ к инструменту, имеет возможность заменить инструмент нужным инструментом. После замены инструмента соответствующий вал затем опускают для повторного введения манипулятора обратно в брюшную полость 14. Другое отличие состоит в том, что главный манипулятор 32 является более сложным, чем вспомогательные манипуляторы, имея больше степеней свободы и больше мощных приводов и роторов. Последнее отличие состоит в том, что главный манипулятор 32 имеет больший диаметр, чем вспомогательные манипуляторы 30, чтобы вместить больше мощных двигателей, больших и сложных хирургических инструментов, и обеспечить больший порт для извлечения любого вырезанного органа или ткани. Главный манипулятор 32 может иметь диаметр в диапазоне от 5 до 12 миллиметров, однако предпочтительно будет иметь диаметр приблизительно 10 миллиметров. Вспомогательные манипуляторы 30 могут иметь диаметр в диапазоне от 3 до 5 миллиметров, однако предпочтительно будут иметь диаметр приблизительно 5 миллиметров. Диаметры главного манипулятора 32 и вспомогательных манипуляторов 30 будут соответствовать диаметру вала, к которому они прикреплены.
[042] Перед хирургической операцией хирург примет решение, какие инструменты понадобятся для операции. Те инструменты, которым не нужен уровень маневренности, который обеспечивает главный манипулятор 32, будут прикреплены к дистальному концу вспомогательных манипуляторов 30. Те инструменты, которым нужен уровень маневренности, который обеспечивает главный манипулятор 32, будут размещены в захватах 64, имеющихся в карусели 62, или прикреплены к дистальному концу главного манипулятора 32. Примеры инструментов, которые можно прикреплять к дистальному концу вспомогательных манипуляторов 30, включают, но без ограничения, осветители, камеры и зажимы. Инструменты, которые можно прикреплять либо к главному манипулятору 32, либо к вспомогательному манипулятору 30, включают, но без ограничения, прозекторы, ножницы, сшиватели, иглодержатели, клипсонакладыватели, прибор для прижигания, втягивающие/ирригационные трубки, и многое другое.
[043] Над интродьюсером 22 и внутри средней части 18 хирургического устройства 10 находятся двигатели и механизмы, которые используют для обеспечения продольного и вращательного движения вторичных валов 38, к которым прикреплены вспомогательные манипуляторы 30. Каждым валом управляют два двигателя. Двигатель 36 обеспечивает возможность вращения вала вокруг своей продольной оси, а двигатель 34 обеспечивает возможность продольного движения вала. Для вращения вала подается питание на соответствующий двигатель 36, который поворачивает шестерню. Шестерня зацепляется с соответствующими пазами на поверхности валов, таким образом вызывая вращение вала. Для обеспечения продольного движения вала питание подается на соответствующий двигатель 34, который вращает колесо. Колесо зацепляется с поверхностью вала, которая в этом месте ровная, поднимая или опуская вал благодаря трению, имеющемуся между поверхностью колеса и валом.
[044] В верхней части 20 хирургического устройства 10 находятся двигатели и механизмы, которые используют для обеспечения продольного и вращательного движения главного вала 40, к которому прикреплен главный манипулятор 32, а также двигатели и механизмы, которые вызывают замену главного инструмента 44, прикрепленного к дистальному концу главного манипулятора 32, другим инструментом, который можно найти в запасах инструментов, удерживаемых каруселью 62. Главным валом 40, к которому прикреплен главный манипулятор 32, управляют два двигателя. Двигатель 80 вызывает вращение главного вала 40 вокруг своей продольной оси, а двигатель 70, который не видно на фиг. 1, вызывает продольное движение главного вала 40.
[045] Для вращения главного вала 40 питание подается на двигатель 80 для вращения шестерни 82, которая зацепляется с соответствующей шестерней 84, находящейся на главном валу 40. Поскольку шестерня 84 должна удерживать свое положение относительно шестерни 82, шестерня 84 скользит вдоль главного вала 40, по мере его движения вдоль своей продольной оси, с помощью одного или нескольких ключей/шпоночных пазов. Для обеспечения продольного движения можно подавать питание на двигатель 70 для вращения колеса 72. По мере вращения колеса 72 оно находится во фрикционном сцеплении с поверхностью главного вала 40, вызывая движение вала вдоль своей продольной оси. Для замены главного инструмента 44 другим инструментом главный вал 40 перемещается так, что главный инструмент 44 оказывается напротив карусели 62. Двигатель в корпусе 66 будет вращать карусель 62 так, что пустой захват 64 располагается напротив главного манипулятора 32. Затем привод 68 будет толкать корпус 66 в направлении главного инструмента 44 так, что захват 64 может зацепляться с главным инструментом 44 и вызвать его извлечение из главного манипулятора 32. Затем привод 68 переместит назад корпус 66 так, что находящийся внутри двигатель может вращать карусель 62 и разместит захват, содержащий соответствующий инструмент, напротив главного манипулятора 32. Затем привод 68 продвинет корпус 66 так, что захват 64 может зацепляться с нужным главным инструментом 44 и вызвать его прикрепление к главному манипулятору 32. Наконец, привод 68 снова переместит назад корпус 66 так, что главный вал 40 можно двигать вдоль своей продольной оси для размещения главного манипулятора 32 на операционном поле в брюшной полости 14.
[046] До этого места в целом были описаны механизмы хирургического устройства 10 и были указаны ключевые компоненты. В следующих разделах будет предоставлено более подробное описание вышеупомянутых механизмов.
[047] На фиг. 2А, В, С, D, и Е показаны различные варианты осуществления интродьюсера 22. Интродьюсер 22 выполняет функцию интерфейса между хирургическим устройством 10 и пациентом, который подвергается операции. Как правило, интродьюсер 22 будет иметь диаметр от 20 до 25 миллиметров, предпочтительно 20 миллиметров, и будет располагаться внутри троакара, который будет введен через стенку 12 брюшной полости через выполненный хирургом надрез. Троакар обеспечит функцию уплотнения, а также места введения для вдувания в брюшную полость 14 газа, для вспомогательных отверстий 26 и главных отверстий 28. Вспомогательные отверстия 26, как правило, будут иметь меньший диаметр, в диапазоне от 3 до 5 миллиметров, а главные отверстия 28, как правило, будут иметь больший диаметр, в диапазоне от 5 до 12 миллиметров. В зависимости от типа хирургической процедуры, которая должна выполняться, может понадобиться меньше вспомогательных манипуляторов 30. На фиг. 2А показан предпочтительный вариант осуществления интродьюсера 22 с четырьмя вспомогательными отверстиями 26 и одним главным отверстием 28. На фиг. 2В показан альтернативный вариант осуществления интродьюсера 22 с тремя вспомогательными отверстиями 26 и одним главным отверстием 28. На фиг. 2С показан другой альтернативный вариант осуществления интродьюсера 22 с двумя вспомогательными отверстиями 26 и одним главным отверстием 28, которое больше главных отверстий 28 интродьюсера на фиг .2А и фиг. 2В. На фиг. 2D показан интродьюсер с тремя главными отверстиями 28 и без вспомогательных отверстий 26. Наконец, на фиг. 2Е показан интродьюсер с двумя главными отверстиями 28 с разными диаметрами и двумя вспомогательными отверстиями 26. Размещение вспомогательных отверстий 26 и главного отверстия 28 может варьироваться от показанного для уменьшения диаметра интродьюсера 22 без отхода от сущности настоящего изобретения. Диаметры валов и манипуляторов, проходящих через соответствующие отверстия, будут немного меньше диаметра самого отверстия.
[048] На фиг. 3 показан изометрический вид верхней части 20 хирургического устройства 10, где находятся механизмы для управления каруселью 62 и главный вал 40. Карусель 62 выполняет функцию устройства для размещения различных инструментов, которые можно подсоединять к дистальному концу главного манипулятора 32. Карусель 62 показана с четырьмя захватами 64 для удержания таких инструментов и обычно этого достаточно, поскольку, стоит напомнить, вспомогательные манипуляторы 30 также содержат прикрепленные к ним инструменты. Перед хирургической операцией хирург установит в захваты 64 те инструменты, которые должны быть под рукой во время операции. Хирург также может заменить инструмент в захвате другим во время операции. Карусель 62 показана на фигурах с четырьмя захватами, однако может содержать дополнительные захваты помимо четырех, показанных на фигурах. Карусель 62 прикреплена к корпусу 66, который содержит внутри двигатель для вращения карусели 62 вокруг ее центральной оси. Корпус 66 можно перемещать вдоль опорного рычага 60 приводом 68 для приближения к главному валу 40 или перемещения назад от него.
[049] В дополнение карусели 62 верхняя часть 20 также содержит механизмы для подъема, опускания и вращения главного манипулятора 32. Двигатель 70 используют для обеспечения вертикального движения главного вала 40, в то время как двигатель 80 используют для вращения главного вала 40. Для подъема или опускания главного манипулятора 40 подается питание на двигатель 70 для вращения колеса 72, находящегося во фрикционном сцеплении с главным валом 40. По мере вращения колеса 72 по часовой стрелке, согласно ориентации по фиг .3, фрикционное сцепление между колесом 72 и главным валом 40 вызовет поднимание главного вала 40. Когда колесо 72 вращается против часовой стрелки, согласно ориентации по фиг. 3, фрикционное сцепление между колесом 72 и главным валом 40 вызовет опускание главного вала 40. Колесо 74 свободно вращается и используется в первую очередь для создания сил трения между колесом 72 и главным манипулятором 40. Двигатель 80 используют для обеспечения вращательного движения главного вала 40. Для вращения главного вала 40 питание подается на двигатель 80 для вращения шестерни 82, косвенно вращающей главный вал 40 с помощью шестерни 84, показанной на подробном виде на фиг. 4. Вращение шестерни 82 по часовой стрелке, согласно ориентации по фиг.3, вызывает вращение главного вала 40 против часовой стрелки. Наоборот, вращение шестерни 82 против часовой стрелки вызывает вращение главного вала 40 по часовой стрелке. По мере движения главного вала 40 вертикально, а двигатель 80 не вращается, шестерня 84 поддерживает свое положение смежно с шестерней 82, поскольку она взаимодействует с главным валом 40 с помощью одного или нескольких ключей 86 в соответствующем шпоночном пазе 88, как показано на фиг .4. По мере движения вала 40 вдоль своей продольной оси шестерня 84 продолжит зацепляться с неподвижной шестерней 82, обеспечивая возможность главному валу 40 скользить через нее, одновременно зацепляясь с главным валом 40 для целей вращения, с помощью интерфейса в форме ключа 86 и шпоночного паза 88.
[050] На фиг. 5 показана блок-схема, показывающая, как карусель 62 и главный вал 40 взаимодействуют для замены главного инструмента 44 другим инструментом. Во время операции, если карусель 62 не выполняет никакой функции, корпус 66, к которой она прикреплена, размещается смежно с приводом 68. Аналогично во время операции главный вал располагается так, что главный манипулятор 32 находится в брюшной полости для размещения главного инструмента 44 на операционном поле. Если хирургу потребуется ввиду обстоятельств операции заменить главный инструмент 44 другим, на первом этапе 200 активируется двигатель 70 и будет вращаться колесо 72 в направлении по часовой стрелке, как видно на фиг. 3, для подъема главного вала 40. По мере подъема главного вала 40 главный манипулятор 32 будет распрямляться, чтобы двигаться через отверстие 28 в интродьюсер 22. Двигатель 70 будет продолжать поднимать главный вал 40, пока главный манипулятор 32 не окажется напротив карусели 62. Далее или одновременно с этапом 200, двигатель внутри корпуса 66 будет вращать карусель 62 так, что пустой захват 64 располагается напротив главного вала 40, как показано на этапе 202. Как только главный инструмент 44 оказывается напротив карусели 62, привод 68 передвигает корпус 66 вдоль опорного рычага 60 в направлении главного инструмента 44, этап 204, так что захват 64 может зацепляться с главным инструментом 44 и удалять его, этап 206. После удаления главного инструмента 44 привод 68 переместит назад корпус 66, так что карусель сможет свободно вращаться двигателем внутри корпуса 66, как показано на этапе 208. В этом месте двигатель внутри корпуса 66 будет вращать карусель 62 так, что захват, содержащий нужный инструмент, оказывается напротив главного манипулятора 32, как показано на этапе 210. Теперь привод 68 снова переместит корпус 66 в направлении главного манипулятора 32, этап 212, и прикрепит нужный инструмент к главному манипулятору 32, этап 214. После прикрепления требуемого инструмента к главному манипулятору 32 привод 68 полностью переместит назад корпус 66, так что тот окажется смежным с приводом 68, этап 216. Одновременно с этапом 216 или независимо от него двигатель 70 активирует и будет вращать колесо 72 в направлении против часовой стрелки, как видно на фиг. 3, для опускания главного вала 40 и, таким образом, опускания главного манипулятора 32 через отверстие 28 в интродьюсере 22, пока главный инструмент 44 не расположится на операционном поле.
[051] На фиг 6 показан вид сверху хирургического устройства 10 для предоставления читателю другого вида. Виден опорный рычаг 60, который используется, чтобы направлять корпус 66 вдоль своей продольной оси и как держатель для привода 68. В корпусе 66 содержится двигатель, который используется для вращения карусели 62. На виде сверху также хорошо видно двигатель 70, который используется для поднимания или опускания главного вала 40, и двигатель 80, который используется для вращения главного вала 40.
[052] На фиг. 7 показан изометрический вид средней части 18 хирургического устройства 10, где находятся механизмы для управления вторичными валами 38. Каждый вторичный вал 38 прикреплен к вспомогательному манипулятору 30 для вращения вспомогательного манипулятора 30 или для его поднимания или опускания. На фиг. 7 показаны четыре вторичных вала 38; таким образом, в этом конкретном варианте осуществления будет использоваться интродьюсер 22, показанный на фиг. 2А. Если бы нужно было использовать интродьюсер 22, показанный на фиг. 2В, то тогда присутствовали бы только три вторичных вала 38, расположенных с одинаковыми интервалами друг от друга вокруг главного вала 40. Если бы нужно было использовать интродьюсер 22, показанный на фиг. 2С, то кроме главного вала 40 присутствовали бы только два вторичных вала 38. Такая же логика распространяется на оставшиеся интродьюсеры, показанные на фиг. 2D и фиг. 2Е. Каждый вторичный вал 38 использует одинаковые средства, оснащенные двигателем, для вращения или для вертикального перемещения вала. Также видны на фиг. 7 главный вал 40 и шпоночный паз 88, позволяющий главному валу 40 двигаться через шестерню 84. Ключ 86, находящийся на шестерне 84, зацепляется со шпоночным пазом 88, так что главный вал 40 может вращаться благодаря силе, действующей на шестерню 84.
[053] На фиг. 8 показан изометрический вид средней части 18, на котором показаны только один вторичный вал 38 и связанные с ним механизмы, для упрощения раскрытия того, как вторичные валы 38 вращаются вокруг своей продольной оси или вертикально перемещаются вдоль нее. Каждый вторичный вал 38 состоит из двух отличающихся секций; нижней секции, содержащей гладкую поверхность, и верхней секции, содержащей поверхность, состоящую из пазов. Для вращения вторичного вала 38а на двигатель 36а подается питание для поворота шестерни 37, которая зацепляется с секцией паза вторичного вала 38а. Вращая шестерню 37, двигатель 36а может контролировать направление, по часовой стрелке или против часовой стрелки; скорость вращения; и количество оборотов, которые должен выполнять вторичный вал 38а. Двигатель 36а прикреплен к раме вокруг хирургического устройства 10, которая не показана и не является частью настоящего изобретения. Для вертикального перемещения вторичного вала 38а вдоль своей продольной оси подается питание на двигатель 34а для поворота колеса 35, находящегося во фрикционном сцеплении с плоской секцией вторичного вала 38а. Путем вращения колеса 35 двигатель 34а может контролировать направление, вверх или вниз, и скорость вертикального перемещения, а также степень вертикального перемещения. Напротив колеса 35 находится другое колесо, которое не видно, на которое не подается питание и которое обеспечивает противодействующую силу силе, приложенной ко вторичному валу 38а колесом 35, для обеспечения надлежащего уровня фрикционного зацепления колеса 35 со вторичным валом 38а. Двигатель 34а прикреплен к раме вокруг хирургического устройства 10, которая не показана и не является частью настоящего изобретения. Средства для вращения или вертикального перемещения вторичного вала 38а, описанные здесь, также используются для вращения или вертикального перемещения других оставшихся вторичных валов.
[054] На фиг. 9 показан изометрический вид нижней части 16 с интродьюсером 22, обозначающим положение стенки 12 брюшной полости, которая не показана, но находится в той же плоскости, что и интродьюсер 22. Те части хирургического устройства 10, которые находятся ниже интродьюсера 22, находятся в брюшной полости 14, в то время как те части, что расположены выше интродьюсера 22, находятся за пределами брюшной полости 14. На фиг. 9 показан предпочтительный вариант осуществления хирургического устройства 10 с интродьюсером 22, рассмотренным на фиг. 2А, который снабжен пятью отверстиями: четырьмя отверстиями для вторичных валов 38 и одним отверстием для главного вала 40. Предпочтительно главный вал 40 будет иметь диаметр в диапазоне от 5 до 12 миллиметров, в то время как вторичные валы 38 будут иметь диаметр в диапазоне от 3 до 5 миллиметров. Диаметры главного манипулятора 32 и вспомогательных манипуляторов 30 будут соответствовать диаметру вала, к которому они прикреплены. В других вариантах осуществления используется интродьюсер 22, показанный на фиг. 2В-2Е, который поддерживает множество конфигураций главных валов 40 и вторичных валов 38. Вторичные валы 38 могут вращаться или перемещаться по вертикали механизмами, описанными на фиг. 7 и фиг. 8.
[055] На фиг. 10 показан изометрический вид нижней части 16, показывающий только один вторичный вал 38 и связанный с ним манипулятор 30 вместе с интродьюсером 22, обозначающим положение стенки 12 брюшной полости, которая не показана, но находится в той же плоскости, что и интродьюсер 22, чтобы лучше раскрыть видимые части вспомогательного манипулятора и связанного с ним вала. Здесь обсуждение также касается остальных вторичных валов и связанных с ними манипуляторов. Показана дистальная часть вторичного вала 38, проходящего через интродьюсер 22 и присоединенного к вспомогательному манипулятору 30 с помощью шарнирного соединения 98. Вторичный манипулятор 30 состоит из двух сегментов: проксимального сегмента 94 и дистального сегмента 96, которые соединены шарнирным соединением 100. Инструмент, не показан, прикреплен к дистальному сегменту 96 напротив шарнирного соединения 100. Механизмы для манипулирования проксимальным сегментом 94 и дистальным сегментом 96 показаны на фиг. 11 и состоят из двух приводов. Первый привод, привод 90, является линейным приводом, причем один конец шарнирно соединен со вторичным валом 38, а противоположный конец шарнирно соединен с проксимальным сегментом 94. После получения электрического сигнала с управляющего компьютера привод 90 может увеличить или уменьшить его общую длину, таким образом вызывая вращение проксимального сегмента 94 вокруг шарнирного соединения 98. Второй привод, привод 92, также является линейным приводом, причем один конец шарнирно соединен с проксимальным сегментом 94, а противоположный конец шарнирно соединен с дистальным сегментом 96. После получения электрического сигнала с управляющего компьютера привод 92 может увеличить или уменьшить его общую длину, таким образом вызывая вращение дистального сегмента 96 вокруг шарнирного соединения 100.
[056] На фиг. 12 показан изометрический вид нижней части 16, на котором показаны только главный вал 40 и главный манипулятор 32 вместе с интродьюсером 22, обозначающим положение стенки 12 брюшной полости, которая не показана, но находится в той же плоскости, что и интродьюсер 22, чтобы лучше раскрыть видимые части главного манипулятора 32 и главного вала 40. Показана дистальная часть главного вала 40, проходящего через интродьюсер 22 и присоединенного к главному манипулятору 32 с помощью шарнирного соединения 118. Главный манипулятор 32 состоит из двух сегментов: проксимального сегмента 114 и дистального сегмента 116, которые соединены шарнирным соединением 120. Главный инструмент 44 прикреплен к дистальному сегменту 116 напротив шарнирного соединения 120. Механизмы для манипулирования проксимальным сегментом 114 и дистальным сегментом 116 показаны на фиг. 13 и состоят из двух приводов и ротора. Первый привод, привод 110, является линейным приводом, причем один конец шарнирно соединен с главным валом 40, а противоположный конец шарнирно соединен с проксимальным сегментом 114. После получения электрического сигнала с управляющего компьютера привод 110 может увеличить или уменьшить его общую длину, таким образом вызывая вращение проксимального сегмента 114 вокруг шарнирного соединения 118. Второй привод, привод 112, также является линейным приводом, причем один конец шарнирно соединен с проксимальным сегментом 114, а противоположный конец шарнирно соединен с дистальным сегментом 116. После получения электрического сигнала с управляющего компьютера привод 112 может увеличить или уменьшить его общую длину, таким образом вызывая вращение дистального сегмента 116 вокруг шарнирного соединения 120. Дополнительная степень свободы обеспечена главному манипулятору 32 ротором 122, так что главный инструмент 44 может вращаться по часовой стрелке или против часовой стрелки.
[057] Хирургическое устройство согласно настоящему изобретению можно использовать в собранном варианте, если хирург определит, что хирургическая операция будет лучше выполнена с использованием только более искусных главных манипуляторов без вспомогательных манипуляторов. В таком сценарии вторичные валы 38 будут удалены с каждого хирургического устройства 10, подлежащего сборке, оставляя только главный вал 40. Путем увеличения длины главного вала 40 верхняя часть 20 каждого хирургического устройства может работать с вращением и вертикальным перемещением главного вала 40, а также со сменой хирургического инструмента на дистальном конце главного манипулятора 32, не мешая работе остальных хирургических устройств 10. Эта компоновка показана на фиг. 14, где вторичный вариант осуществления 140 хирургического устройства 10, где агрегат из трех хирургических устройств, 140а, 140b, и 140с, причем каждое содержит соответствующие главные валы 40а, 40b и 40с вместе с главными манипуляторами 32а, 32b и 32с, сгруппированы с интродьюсером 22, показанным на фиг. 2D. Хотя хирург может для работы иметь меньше манипуляторов, использование главных манипуляторов предоставляет хирургу дополнительные возможности, такие как более мощные двигатели и приводы, дополнительные степени свободы и способность автономной замены хирургического инструмента на дистальном конце каждого манипулятора.
[058] На фиг. 15 показан альтернативный вариант осуществления 142 хирургического устройства согласно настоящему изобретению. Здесь верхняя часть 20 хирургического устройства 142 отличается от предпочтительного варианта осуществления хирургического устройства 10 тем, что карусель 62 заменена рейкой 63 на которой закреплено вдоль одной стороны несколько захватов 64. Двигатель в корпусе 66 поворачивает шестерню, которая зацепляется с дорожкой 65 и обеспечивает возможность перемещения рейки 63 в боковом направлении вдоль дорожки 65. Если хирургу потребуется ввиду обстоятельств операции заменить главный инструмент 44 другим, нужно использовать такой же способ, какой показан на фиг. 5, за исключением того, что в этом случае рейка 63 движется в сторону главного вала или от него под действием привода 68, в то время как двигатель в корпусе 66 перемещает рейку 63 в боковом направлении для размещения нужного захвата 64 напротив главного вала 40.
[059] На фиг. 16 показан альтернативный вариант 144 осуществления хирургического устройства согласно настоящему изобретению. Здесь верхняя часть 20 хирургического устройства 144 отличается от предпочтительного варианта осуществления хирургического устройства 10 тем, что карусель 62 и корпус 66 установлены перпендикулярно на опорный рычаг 60, по сравнению с хирургическим устройством 10. Привод 68 все еще функционирует для перемещения корпуса 66 вдоль опорного рычага 60, в то время как двигатель в корпусе 66 вращает карусель 62 так, что захват 64 может быть размещен напротив главного вала 40. Для выравнивания главного вала 40 с захватом 64 нужно применить горизонтальный сдвиг к опорному рычагу 60. Вместо прикрепления опорного рычага 60 к пластине 76, как показано на фиг.3, в этом варианте осуществления опорный рычаг 60 будет прикреплен к задней пластине 78. Если хирургу потребуется ввиду обстоятельств операции заменить главный инструмент 44 другим, нужно использовать такой же способ, какой показан на фиг. 5.
[060] На фиг. 17 показан альтернативный вариант осуществления 146 хирургического устройства согласно настоящему изобретению, где несколько главных манипуляторов 32 и вспомогательных манипуляторов 30 используются вместе с интродьюсером 22, показанным на фиг. 2Е. Вспомогательный манипулятор 30b и соответствующие двигатели 36b и 38b не видны, поскольку они находятся за главными валами 40а и 40b. В этом варианте осуществления вспомогательный манипулятор 30а может содержать камеру, в то время как вспомогательный манипулятор 30b может содержать осветитель, поскольку этим хирургическим инструментам не нужна высокая точность, тогда как главные манипуляторы 40а и 40b могут поддерживать хирургические инструменты, для которых во время использования требуется большая точность.
[061] Это изобретение было описано и были представлены конкретные примеры этого изобретения. Несмотря на то, что настоящее изобретение было описано исходя из конкретных вариантов и иллюстративных фигур, специалистам в данной области техники будет понятно, что настоящее изобретение не ограничено описанными вариантами или фигурами. В дополнение, там, где описанные выше способы и этапы указывают на то, что определенные события происходят в определенной последовательности, специалистам в данной области техники будет понятно, что порядок определенных этапов можно изменить, и такие изменения соответствуют вариантам настоящего изобретения. Дополнительно определенные этапы можно выполнять одновременно, в параллельном процессе, если возможно, а также выполнять последовательно, как описано выше.



Группа изобретений относится к медицинской технике, а именно к устройству, используемому в процедурах хирургии минимального вмешательства. Роботизированное хирургическое устройство для выполнения процедур хирургии минимального вмешательства, выполненное с возможностью введения сменного хирургического инструмента в операционное поле и его перемещения назад от него. Устройство содержит: главный вал (40), который является цилиндрическим, содержит проксимальный и дистальный концы и гладкую наружную поверхность, содержащую шпоночный паз (88) вдоль своей продольной оси; главный манипулятор (32), содержащий проксимальный и дистальный концы и проксимальный сегмент 114, дистальный сегмент 116, где проксимальный конец главного манипулятора (32) прикреплен к дистальному концу главного вала (40). Хирургический инструмент (44) прикреплен с возможностью отсоединения к дистальному концу главного манипулятора (32). Двигатели (70,80), выполненные с обеспечением перемещения главного вала (40) вдоль и вращения вокруг своей продольной оси, с возможностью при этом перемещения главного вала (40) вдоль своей продольной оси через вторую шестерню (84). Механизм для хранения хирургических инструментов (44) содержит: опорный рычаг (60), перпендикулярный главному валу (40), содержащий первый и второй концы, причем первый конец является проксимальным главному валу (40); корпус (66), содержащий двигатель для управления системой хранения, содержащей захваты (64), которые способны удерживать хирургический инструмент (44), корпус (66) выполнен с возможностью перемещения вдоль длины опорного рычага (60); и привод (68), установленный на втором конце опорного рычага (60) и находящийся в зацеплении с корпусом (66) для обеспечения перемещения корпуса (66) вдоль длины опорного рычага (60); и интродьюсер (22), установленный в надрезе в теле пациента, содержащий по меньшей мере одно отверстие (28), чтобы обеспечить возможность прохождения через них главного вала (40) так, что хирургический инструмент (44), прикрепленный к главному манипулятору (32), может быть размещен на операционном поле. Управляемые компьютером способы замены хирургического инструмента в хирургическом устройстве, находящегося на дистальном конце главного манипулятора (32), хирургическим инструментом (44), находящимся в захвате (64). Роботизированное хирургическое устройство для выполнения процедур хирургии минимального вмешательства, в котором хирургический инструмент (44) прикреплен с возможностью отсоединения к дистальному концу главного манипулятора (32); содержит механизм для хранения хирургических инструментов (44), в котором: опорный рычаг (60), перпендикулярный главному валу (40), содержащий первый и второй концы, причем первый конец является проксимальным главному валу (40). Корпус (66) с двигателем, выполненным с возможностью вращения карусели (62). Карусель (62) с захватами (64), каждый захват (64) может удерживать хирургический инструмент (44). Техническим результатом является сокращение степени повреждения тканей и потери крови во время хирургической операции. 4 н. и 5 з.п. ф-лы, 17 ил.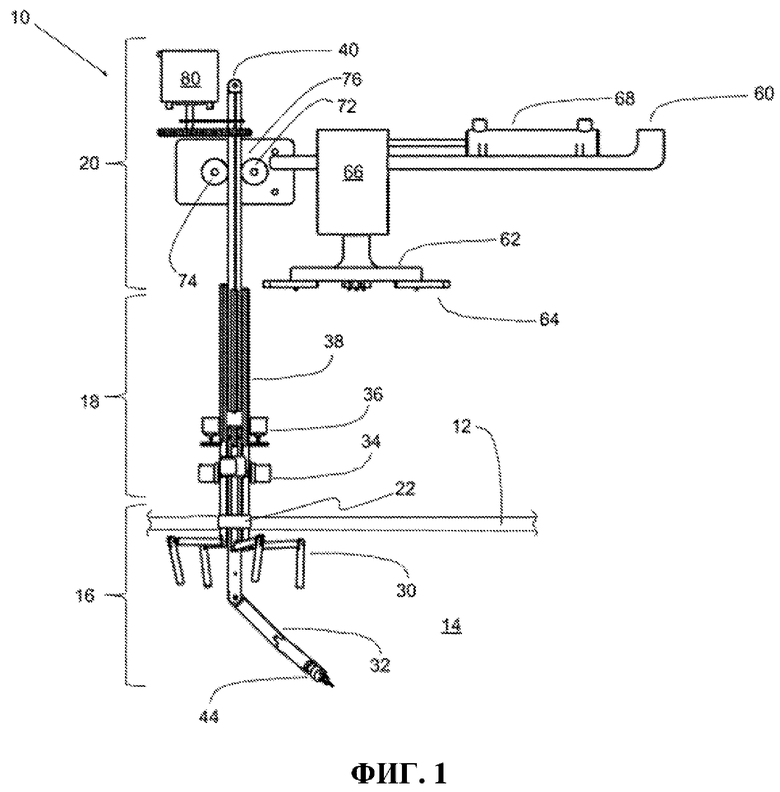
1. Роботизированное хирургическое устройство для выполнения процедур хирургии минимального вмешательства, выполненное с возможностью введения сменного хирургического инструмента в операционное поле и его перемещения назад от него, при этом устройство содержит:
главный вал (40), который является цилиндрическим, содержит проксимальный и дистальный концы и гладкую наружную поверхность, содержащую шпоночный паз (88) вдоль своей продольной оси;
главный манипулятор (32), содержащий проксимальный и дистальный концы и дополнительно содержащий проксимальный сегмент 114 и дистальный сегмент 116, где проксимальный конец главного манипулятора (32) прикреплен к дистальному концу главного вала (40), а хирургический инструмент (44) прикреплен с возможностью отсоединения к дистальному концу главного манипулятора (32);
двигатель (70), выполненный с возможностью приведения в движение фрикционного колеса (72), которое находится в функциональном зацеплении с поверхностью главного вала (40) с обеспечением перемещения главного вала (40) вдоль своей продольной оси в результате вращательного движения фрикционного колеса (72);
двигатель (80), выполненный с возможностью приведения в движение первой шестерни (82), которая зацепляется со второй шестерней (84) вокруг главного вала (40), причем вторая шестерня (84) находится в зацеплении с главным валом (40) с помощью шпонки (86) в шпоночном пазу (88) с обеспечением вращения главного вала (40) вокруг своей продольной оси в результате вращения второй шестерни (84) с возможностью при этом перемещения главного вала (40) вдоль своей продольной оси через вторую шестерню (84);
механизм для хранения хирургических инструментов (44), дополнительно содержащий:
опорный рычаг (60), перпендикулярный главному валу (40), содержащий первый и второй концы, причем первый конец является проксимальным главному валу (40);
корпус (66), содержащий двигатель для управления системой хранения, содержащей захваты (64), причем каждый захват (64) способен удерживать хирургический инструмент (44), причем корпус (66) выполнен с возможностью перемещения вдоль длины опорного рычага (60); и
привод (68), установленный на втором конце опорного рычага (60) и находящийся в зацеплении с корпусом (66) для обеспечения перемещения корпуса (66) вдоль длины опорного рычага (60); и
интродьюсер (22), установленный в надрезе в теле пациента, содержащий по меньшей мере одно отверстие (28), чтобы обеспечить возможность прохождения через них главного вала (40) так, что хирургический инструмент (44), прикрепленный к главному манипулятору (32), может быть размещен на операционном поле.
2. Хирургическое устройство по п. 1, в котором система хранения содержит карусель (62), выполненную с возможностью вращения с помощью двигателя в корпусе (66), причем карусель (62) содержит захваты (64), причем каждый захват (64) может удерживать хирургический инструмент (44).
3. Хирургическое устройство по п. 1, в котором система хранения содержит рейку (63), выполненную с возможностью перемещения с помощью двигателя в корпусе (66), причем рейка (63) содержит захваты (64), причем каждый захват (64) может удерживать хирургический инструмент (44).
4. Хирургическое устройство по п. 1, отличающееся тем, что дополнительно содержит вторичные валы (38), причем вторичные валы (38) являются цилиндрическими, смежными и параллельными главному валу (40) и содержат проксимальные и дистальные концы, причем поверхность проксимальной части вторичного вала (38) содержит систему пазов, параллельных продольной оси вала;
причем каждый из вторичных валов (38) содержит:
вспомогательный манипулятор (30) с проксимальным и дистальным концами, причем проксимальный конец вспомогательного манипулятора (30) прикреплен к дистальному концу вторичного вала (38), а хирургический инструмент (44) прикреплен с возможностью отсоединения к дистальному концу вспомогательного манипулятора (30);
двигатель (34), выполненный с возможностью приведения фрикционного колеса (35), которое находится в функциональном зацеплении с поверхностью дистальной части вторичного вала (38) с обеспечением перемещения вторичного вала (38) вдоль своей продольной оси в результате вращательного движения фрикционного колеса (35); и
двигатель (36), выполненный с возможностью приведения в движение шестерни (37), которая зацепляется с пазами так, что при вращении шестерни (37) с помощью двигателя обеспечено вращение вторичного вала (38); и
интродьюсер (22), также содержащий дополнительные отверстия (26) для обеспечения возможности прохождения вторичных валов (38) через них, так что хирургические инструменты (44), прикрепленные к вспомогательным манипуляторам (32), могут быть размещены на операционном поле.
5. Хирургическое устройство по п. 4, в котором интродьюсер имеет конфигурацию, содержащую любое из следующего:
четыре отверстия для вторичных валов и одно отверстие для главного вала,
три отверстия для вторичных валов и одно отверстие для главного вала или
два отверстия для вторичных валов и одно отверстие для главного вала.
6. Хирургическое устройство по п. 4, отличающееся тем, что диаметр главного вала (40) больше диаметра любого вторичного вала (38).
7. Способ замены хирургического инструмента в хирургическом устройстве по п. 2, представляющий собой управляемый компьютером способ замены хирургического инструмента (44), находящегося на дистальном конце главного манипулятора (32), хирургическим инструментом (44), находящимся в захвате (64), причем способ включает следующие этапы:
выпрямление главного манипулятора (32);
активацию двигателя (70) для вращения фрикционного колеса (72), чтобы вызвать перемещение главного вала (40) в сторону от интродьюсера (22) на такую высоту, что хирургический инструмент (44), прикрепленный к дистальному концу главного манипулятора (32), может войти в зацепление с захватом (64) на карусели (62);
активацию двигателя в корпусе (66) для вращения карусели (62), так что пустой захват (64) располагается напротив хирургического инструмента (44), прикрепленного к дистальному концу главного манипулятора (32);
активацию привода (68) для перемещения корпуса (66) в направлении главного манипулятора (32), так что пустой захват (64) на карусели (62) зацепляется с хирургическим инструментом (44), прикрепленным к дистальному концу главного манипулятора (32), и извлекает его;
активацию привода (68) для перемещения корпуса (66) в сторону от главного манипулятора (32);
активацию двигателя в корпусе (66) для вращения карусели (62), так что
захват (64) с требуемым хирургическим инструментом (44) оказывается напротив дистального конца главного манипулятора (32);
активацию привода (68) для перемещения корпуса (66) в направлении главного манипулятора (32), так что захват (64) с требуемым хирургическим инструментом (44) зацепляет хирургический инструмент (44) с дистальным концом главного манипулятора (32) и прикрепляет его к нему;
активацию привода (68) для перемещения корпуса (66) в сторону от главного манипулятора (32);
активацию двигателя (70) для вращения фрикционного колеса (72), чтобы вызвать перемещение главного вала (40) в интродьюсер и через него, так что хирургический инструмент (44), прикрепленный к дистальному концу главного манипулятора (32), может размещаться на операционном поле; и
размещение хирургического инструмента (44) на операционном поле.
8. Способ замены хирургического инструмента в хирургическом устройстве по п. 3, представляющий собой управляемый компьютером способ замены хирургического инструмента (44), находящегося на дистальном конце главного манипулятора (32), хирургическим инструментом (44), находящимся в захвате (64), причем способ включает следующие этапы:
выпрямление главного манипулятора (32);
активацию двигателя (70) для вращения фрикционного колеса (72), чтобы вызвать перемещение главного вала (40) в сторону от интродьюсера (22) на такую высоту, что хирургический инструмент (44), прикрепленный к дистальному концу главного манипулятора (32), может войти в зацепление с захватом (64) на рейке (63);
активацию двигателя в корпусе (66) для перемещения рейки (63), так что пустой захват (64) оказывается напротив хирургического инструмента (44), прикрепленного к дистальному концу главного манипулятора (32);
активацию привода (68) для перемещения корпуса (66) в направлении главного манипулятора (32), так что пустой захват (64) на рейке (63) зацепляется с хирургическим инструментом (44), прикрепленным к дистальному концу главного манипулятора (32), и извлекает его;
активацию привода (68) для перемещения корпуса (66) в сторону от главного манипулятора (32);
активацию двигателя в корпусе (66) для перемещения рейки (63), так что захват (64) с требуемым хирургическим инструментом (44) оказывается напротив дистального конца главного манипулятора (32);
активацию привода (68) для перемещения корпуса (66) в направлении главного манипулятора (32), так что захват (64) с требуемым хирургическим инструментом (44) зацепляет хирургический инструмент (44) с дистальным концом главного манипулятора (32) и прикрепляет его к нему;
активацию привода (68) для перемещения корпуса (66) в сторону от главного манипулятора (32);
активацию двигателя (70) для вращения фрикционного колеса (72), чтобы вызвать перемещение главного вала (40) в интродьюсер (22) и через него, так что хирургический инструмент (44), прикрепленный к дистальному концу главного манипулятора (32), может быть размещен на операционном поле; и
размещение хирургического инструмента (44) на операционном поле.
9. Роботизированное хирургическое устройство для выполнения процедур хирургии минимального вмешательства, выполненное с возможностью введения сменного хирургического инструмента в операционное поле и его перемещения назад, при этом устройство содержит:
главные валы (40), причем каждый главный вал (40):
является цилиндрическим;
содержит проксимальный и дистальный концы;
содержит гладкую наружную поверхность, содержащую шпоночный паз (88) вдоль своей продольной оси;
содержит двигатель (70), выполненный с возможностью приведения в движение фрикционного колеса (72), которое находится в функциональном зацеплении с поверхностью главного вала (40) с обеспечением перемещения главного вала (40) вдоль своей продольной оси в результате вращательного движения фрикционного колеса (72);
содержит двигатель (80), выполненный с возможностью приведения в движение первой шестерни (82), которая зацепляется со второй шестерней (84) вокруг главного вала (40), причем вторая шестерня (84) находится в зацеплении с главным валом (40) с помощью шпонки (86) в шпоночном пазу (88), так что вращение второй шестерни (84) вызывает вращение главного вала (40) вокруг своей продольной оси, вместе с тем обеспечивая возможность перемещения главного вала (40) вдоль своей продольной оси через вторую шестерню (84);
содержит главный манипулятор (32) с проксимальным и дистальным концами, при этом проксимальный конец главного манипулятора (32) прикреплен к дистальному концу главного вала (40), а хирургический инструмент (44) прикреплен с возможностью отсоединения к дистальному концу главного манипулятора (32);
содержит механизм для хранения хирургических инструментов (44), причем механизм содержит:
опорный рычаг (60), перпендикулярный главному валу (40), содержащий первый и второй концы, причем первый конец является проксимальным главному валу (40);
корпус (66), содержащий двигатель, выполненный с возможностью вращения карусели (62), причем карусель (62) содержит захваты (64), причем каждый захват (64) может удерживать хирургический инструмент (44), причем корпус (66) выполнен с возможностью перемещения вдоль длины опорного рычага (60); и
привод (68), установленный на втором конце опорного рычага (60) и находящийся в зацеплении с корпусом (66) для обеспечения перемещения корпуса (66) вдоль длины опорного рычага (60); и
интродьюсер (22), установленный в надрезе в теле пациента, содержащий отверстия (26), чтобы обеспечить возможность прохождения через них главных валов (40) так, что хирургический инструмент (44), прикрепленный к главным манипуляторам (32), может быть размещен на операционном поле.
| WO2017059412A1, 06.04.2017 | |||
| US2011118756A1, 19.05.2011 | |||
| US2017086927A1, 30.03.2017 | |||
| WO2017165183A1, 28.09.2017 | |||
| US2011290855A1, 01.12.2011 | |||
| US2011040305A1, 17.02.2011. |

