Настоящее изобретение является частичным продолжением заявки на патент США под заголовком "Способ и устройство для проведения минимально инвазивных операций на сердце", которая получила серийный номер 08/603543, которая подана 20 февраля 1996 и которая в настоящее время находится на рассмотрении и включена здесь для ссылки.
1. Область изобретения
Настоящее изобретение относится к системе и способу проведения минимально инвазивных операций на сердце. Конкретнее, настоящее изобретение относится к системе - роботу и хирургическим инструментам, которые можно съемно присоединять к ней, где упомянутая система предназначена для проведения минимально инвазивных хирургических операций.
2. Описание предшествующего уровня техники
Закупорка коронарной артерии может лишить сердце крови и кислорода, необходимых для поддержания жизни. Закупорку можно устранить медикаментозным путем или ангиопластикой. В тяжелых случаях закупорки осуществляют шунтирование коронарной артерии (CABG) для обхода закупоренного участка артерии. Обычно операции по CABG осуществляют при рассечении грудины и вскрытии грудной полости для получения доступа к сердцу. В участке артерии, смежном с закупоренным участком, делают надрез. Затем отделяют внутреннюю грудную артерию (IMA) и присоединяют к артерии в точке надреза. IMA обходит закупоренный участок артерии для обеспечения полноценного потока крови к сердцу. Рассечение грудины и вскрытие грудной полости, обычно относящиеся к так называемой "открытой хирургии", могут вызвать у пациента значительную травму. Кроме того, сломанная грудина удлиняет период выздоровления пациента.
Осуществлялись попытки проводить операции по CABG без вскрытия грудной полости. Минимально инвазивные операции (МIS) проводятся при введении хирургических инструментов и эндоскопа через небольшой разрез в коже пациента. Манипулирование такими инструментами может быть неточным, особенно при сшивании пересаживаемого сосуда с артерией. Было установлено, что для тщательного управления инструментами необходим высокий уровень точности. Кроме того, обычно человеческие руки обладают, по меньшей мере, незначительным тремором. Тремор дополнительно увеличивает трудность осуществления минимально инвазивных операций на сердце.
Для проведения MIS хирург использует специальные инструменты. Эти инструменты позволяют хирургу маневрировать внутри пациента. Одним типом инструментов, который применяют в минимально инвазивной хирургии, является пинцет, инструмент, имеющий кончик, особая форма которого приспособлена для захвата объектов, таких как иглы. Поскольку пинцет и другие инструменты, предназначенные для минимально инвазивной хирургии, обычно являются длинными и жесткими, они не способствуют точности для эффективного выполнения многих операций минимально инвазивным способом. Например, обычные пинцеты для MIS непригодны для манипулирования иглой соответствующим образом во время минимально инвазивной операции, такой как эндоскопия. Следовательно, многие операции в MIS, которые могли бы выполняться, в настоящее время не осуществляют.
По существу, во время открытых операций кончики различных инструментов могут располагаться с шестью степенями свободы. Однако при введении инструмента через небольшое отверстие, подобное тому, какое делается у пациента для выполнения минимально инваэивной операции, две степени свободы теряются. Это та потеря свободы движения в месте операции, которая значительно ограничивает типы операций, выполняемых в MIS.
Ловкость при MIS теряется вследствие того, что используемые инструменты неспособны обеспечить дополнительные степени свободы, которые теряются при введении инструментов пациенту. Одной из проблем, связанных с этой потерей ловкости, является невозможность накладывать швы, когда инструменты находятся в определенных положениях. В результате почти невозможно проводить операции, которые требуют наложения большого количества швов в месте операции, поскольку отсутствуют хирургические инструменты, которые делают возможным осуществлять большую часть этой работы.
Другой проблемой, связанной с MIS, является отсутствие точности в операционном поле. При таких операциях, как MICABG (минимально инвазивное шунтирование коронарной артерии), необходимо накладывать чрезвычайно маленькие швы в различных положениях проксимальнее сердца. По существу, необходимо точное движение инструмента на конце хирургического инструмента. В настоящее время с помощью руки, держащей инструмент, точность, необходимая для подобного наложения швов, теряется.
По существу, необходимым в этой области является инструмент и группа хирургических инструментов, которые можно координировать внутри пациента таким образом, что хирург имеет дополнительные степени свободы, пригодные для более ловкого и точного расположения инструмента, расположенного на конце инструмента, как это необходимо.
Кроме того, необходимыми в этой области являются способ и механизм, которые обеспечили бы простой инструмент и возможность замены инструмента таким образом, что различные инструменты можно легко и просто заменять, что дает возможность проводить операции быстрее и таким образом сводит до минимума стоимость операции для пациента и уменьшает продолжительность анестезии у пациента.
Настоящее изобретение направлено на решение вышеупомянутых проблем.
Сущность изобретения
Настоящее изобретение является системой для проведения минимально инвазивных операций на сердце. Система включает пару или более хирургических инструментов, соединенных с парой манипуляторов робота. Система может включать только один хирургический инструмент и также один манипулятор робота, как это раскрывается здесь ниже. Инструменты имеют концевые исполнительные механизмы, которыми можно манипулировать для отделения, поддержания, прижигания и сшивания тканей. Манипуляторы робота соединены с парой управляющих ручек с помощью контроллера. Хирург может двигать руками для выполнения соответствующего движения концевых исполнительных механизмов. Движение ручек соотнесено таким образом, что концевые исполнительные механизмы имеют соответствующее движение, которое отличается обычно меньше, чем движение, осуществляемое руками хирурга. Это помогает в устранении любого тремора, который может иметь место в руках хирурга. Масштабный коэффициент подобран таким образом, что хирург может регулировать разрешающую способность движения концевых исполнительный механизмов. Движение концевых исполнительных механизмов может контролироваться входной кнопкой таким образом, что концевой исполнительный механизм может двигаться только тогда, когда хирург нажимает или надавливает на кнопку. Входная кнопка позволяет хирургу регулировать положение ручек без движения концевых исполнительных механизмов таким образом, что ручки можно передвигать в более удобное положение.
Система может иметь также контролируемый роботом эндоскоп, который позволяет хирургу дистанционно обозревать место операции. Операция на сердце может осуществляться при выполнении небольших надрезов на коже пациента и введении инструментов и эндоскопа пациентам. Хирург манипулирует ручками и двигает концевыми исполнительными механизмами для проведения операций на сердце, таких как шунтирование коронарной артерии или вмешательство на сердечных клапанах.
Дополнительно настоящее изобретение направлено на хирургический инструмент и способ его управления, который позволяет хирургу соединять кончик инструмента, поддерживая функцию инструмента в кончике инструмента. По существу, кончик инструмента можно связать с двумя степенями свободы, все время можно использовать инструмент на кончике.
Система робота обычно включает:
манипулятор робота,
соединительное устройство, которое прикреплено к манипулятору,
хирургический инструмент, поддерживаемый соединительным устройством,
контроллер, причем движение контроллера производит пропорциональное движение манипулятора робота и хирургического инструмента.
Настоящее изобретение может включать хирургический инструмент, который имеет удлиненный стержень. Удлиненный стержень имеет продольную ось и обычно служит в качестве манипулятора эндоскопического инструмента. Шарнирная часть монтируется к и распространяется за пределы удлиненного стержня. Альтернативно шарнирную часть можно изготавливать как одно целое с удлиненным стержнем. Шарнирная часть имеет проксимальную часть, поворотное соединение и дистальную часть. Проксимальная часть может включать пару пальцев. Пальцы могут занимать ортогональное положение относительно друг друга и ориентированы радиально к продольной оси удлиненного стержня. При использовании в хирургических операциях обычно предпочтительно, если инструмент и большинство компонентов там выполняются из нержавеющей стали, пластика или других легко стерилизующихся материалов. Каждый из пальцев может иметь, по меньшей мере, одно отверстие, сделанное там для прохождения штифта, который предназначен для прикрепления поворотного соединения к проксимальной части шарнирной части и который позволяет шарнирно монтировать поворотное соединение к проксимальной части. Шарнирная часть обеспечивает сочленение на конце инструмента, который включает шарнирную часть. Конкретнее, это обеспечивает дополнительные степени свободы для устройства на кончике инструмента, который включает шарнирную часть.
Такой инструмент, как раскрыто здесь ниже, при использовании совместно с настоящей хирургической системой обеспечивает хирургу дополнительную ловкость, точность и гибкость, до настоящего времени не достигнутые при минимально инвазивных хирургических операциях. По существу, время операции может сократиться, и травма для пациента заметно уменьшится.
Для обеспечения повышенной точности при расположении сочлененного кончика, как раскрыто здесь ниже, предоставляются две дополнительные степени свободы для контроллера управления. Каждая из двух дополнительных степеней свободы спланирована к каждой из степеней свободы на кончике инструмента. Это осуществляется посредством дополнительного введения двух соединений на управляющем и автоматических средствах для соединения кончика инструмента в ответ на движения, выполненные управляющей частью системы.
Объекты и преимущества настоящего изобретения станут более очевидными обычным специалистам в этой области после рассмотрения следующего подробного описания и чертежей.
Краткое описание чертежей
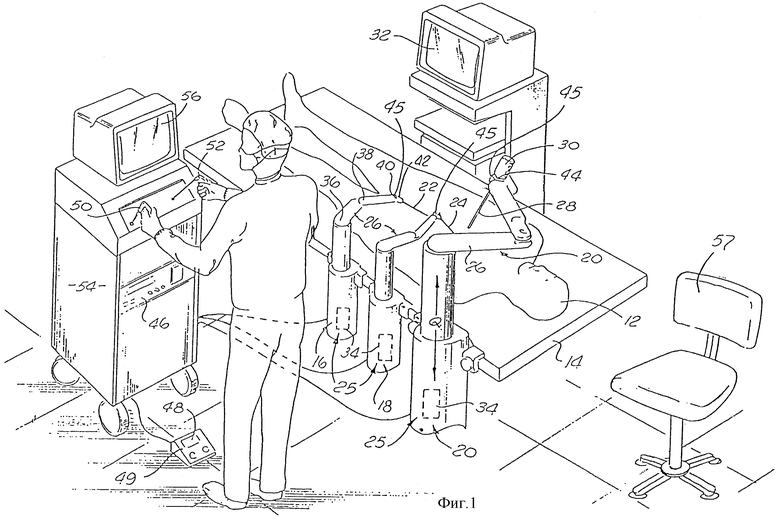
Фиг.1 представляет собой перспективный вид минимально инвазивной хирургической системы по настоящему изобретению,
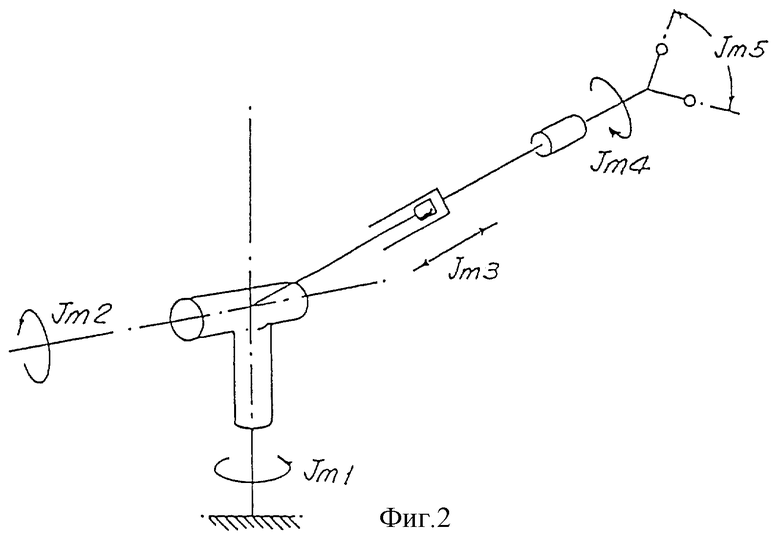
фиг.2 представляет собой схему управляющей части системы,
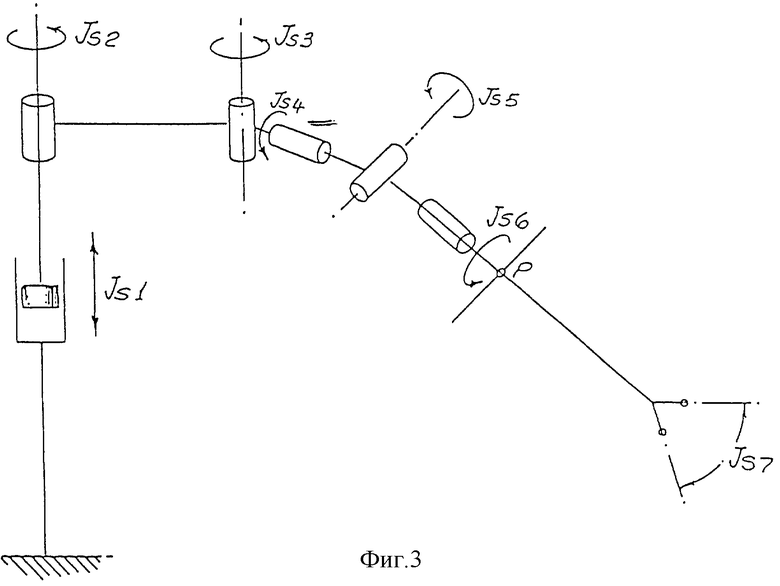
фиг.3 представляет собой схему подчиненной части системы,
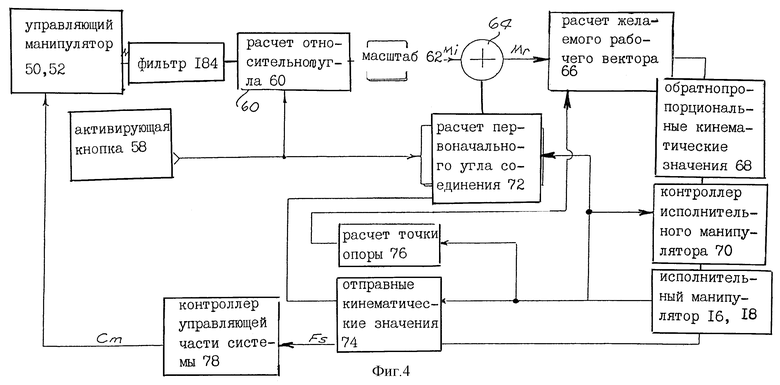
фиг.4 представляет собой схему системы управления,
фиг.5 представляет собой схему, показывающую инструмент в системе координат,
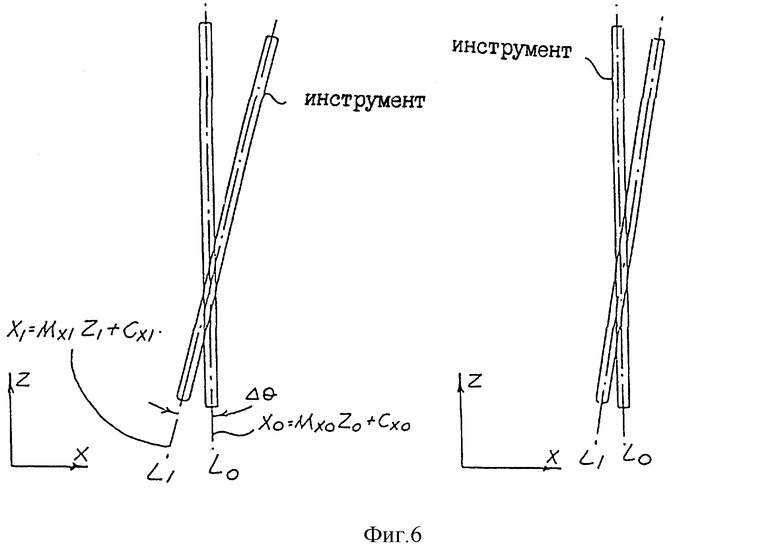
фиг.6 представляет собой схему инструмента, движущегося относительно точки опоры,
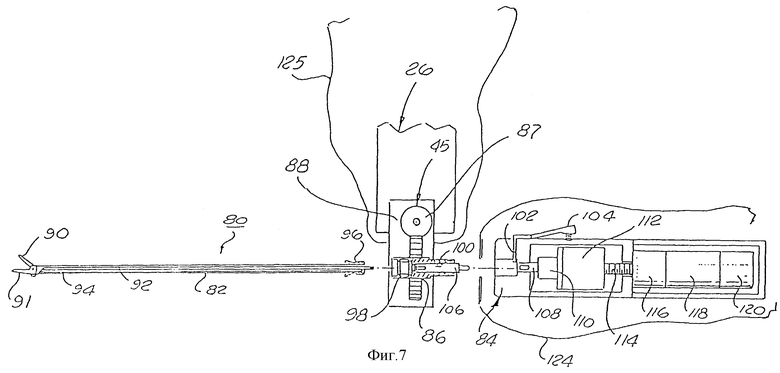
фиг.7 представляет собой изображение концевого исполнительного механизма в разобранном виде в соответствии с системой по настоящему изобретению,
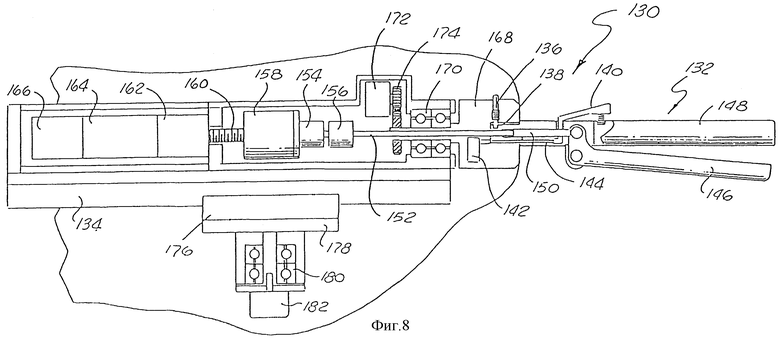
фиг.8 представляет собой вид управляющей ручки системы по настоящему изобретению,
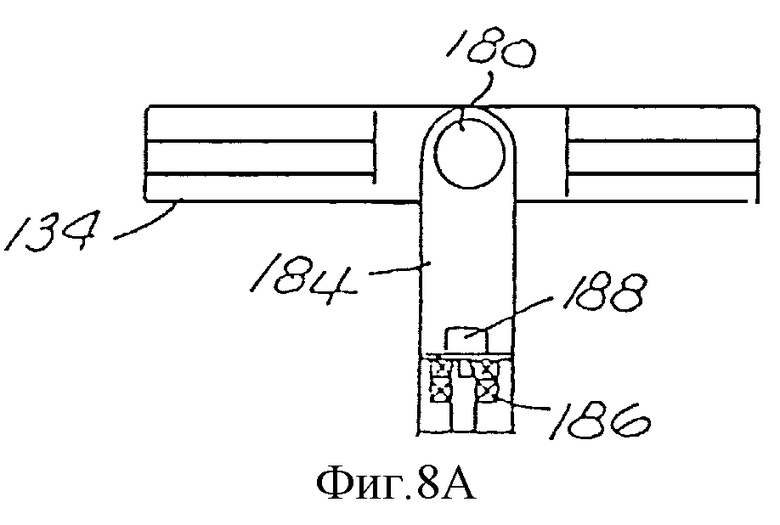
фиг.8А представляет собой боковой вид управляющей ручки системы по настоящему изобретению,
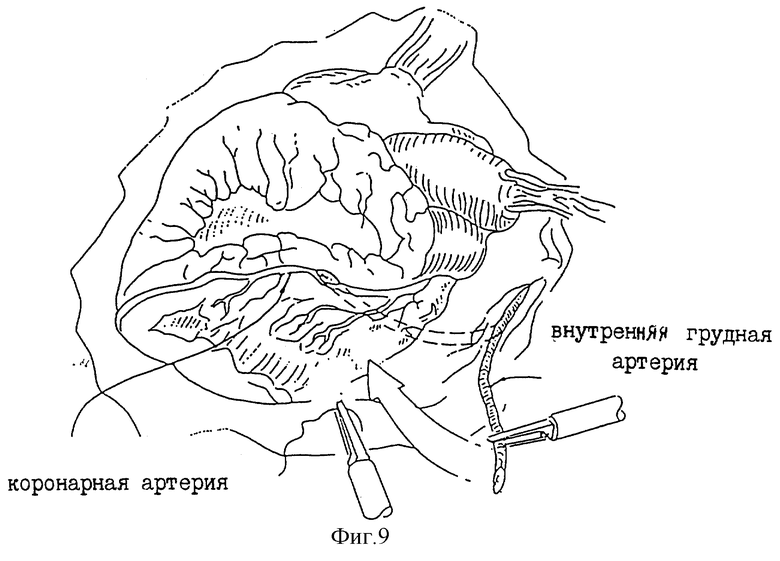
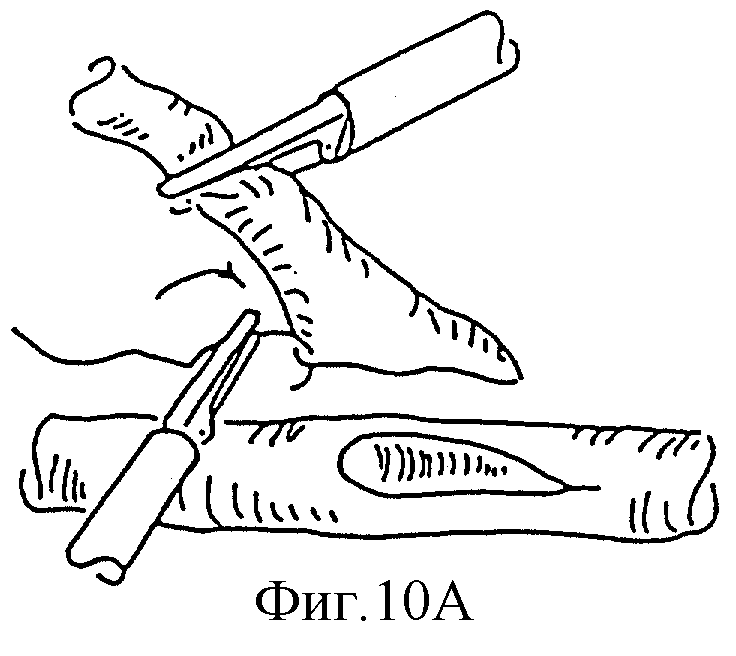
фиг.9-10A-J представляют собой иллюстрации, показывающие внутреннюю грудную артерию, подшитую к коронарной артерии,
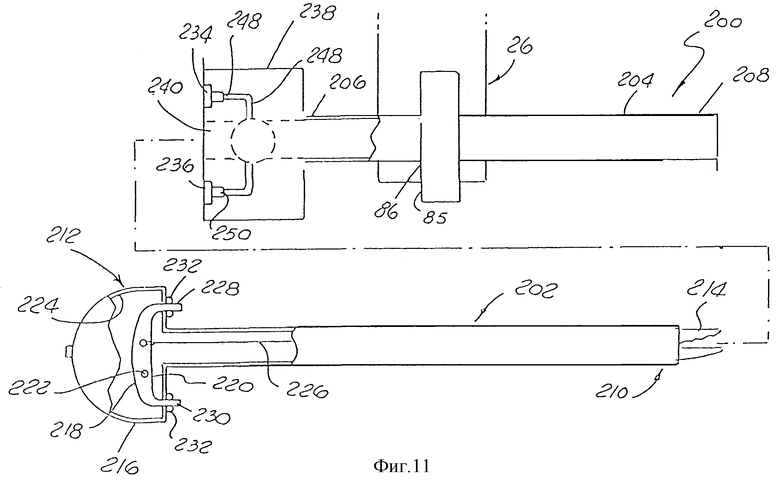
фиг.11 представляет собой боковой вид заднего загрузочного привода инструмента в соответствии с системой по настоящему изобретению,
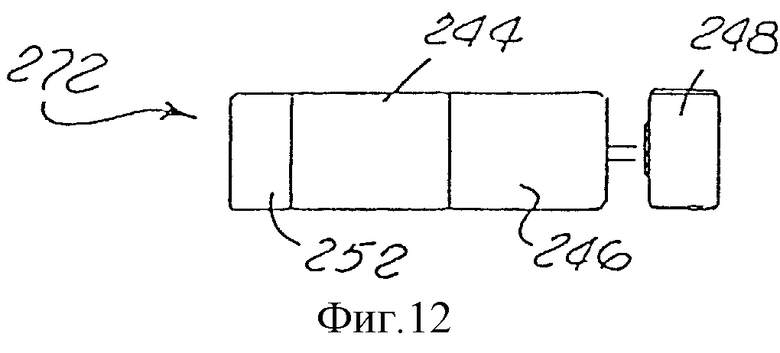
фиг.12 представляет собой план узла двигателя заднего загрузочного привода инструмента из фиг.11,
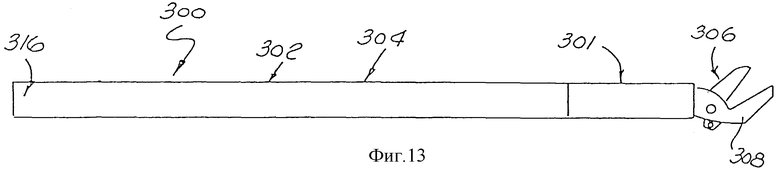
фиг.13 представляет собой боковой план шарнирного инструмента по настоящему изобретению,
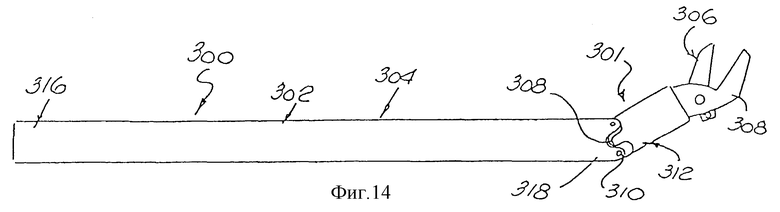
фиг.14 представляет собой боковой план шарнирного инструмента, где присоединен кончик инструмента,
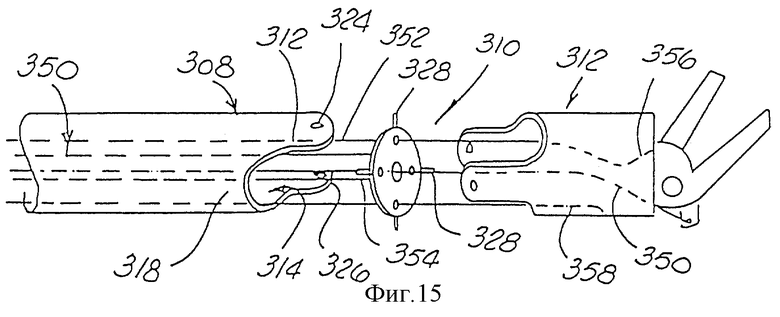
фиг.15 представляет собой изображение в разобранном виде шарнирной части шарнирного инструмента по настоящему изобретению,
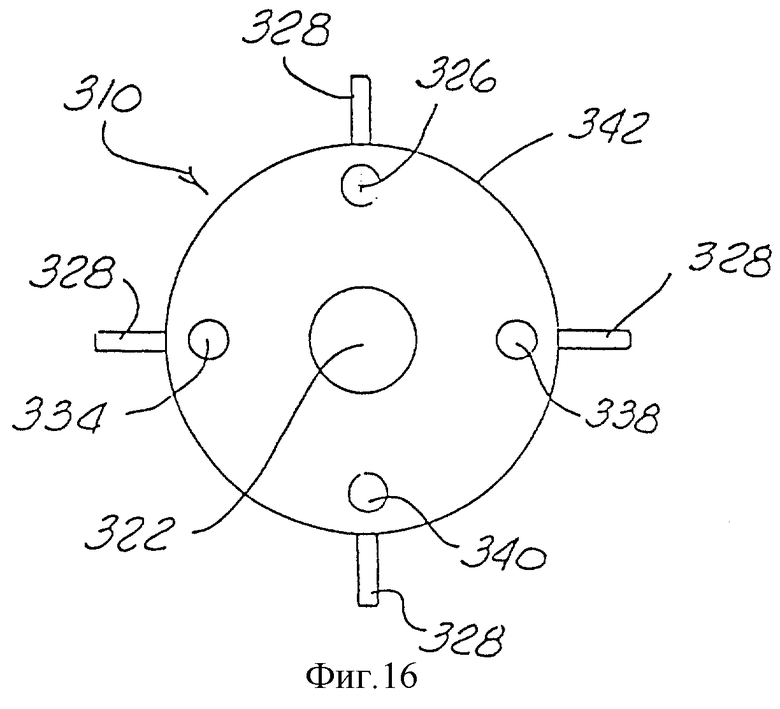
фиг.16 представляет собой план поворотного соединения в соответствии с шарнирной частью шарнирного хирургического инструмента по настоящему изобретению,
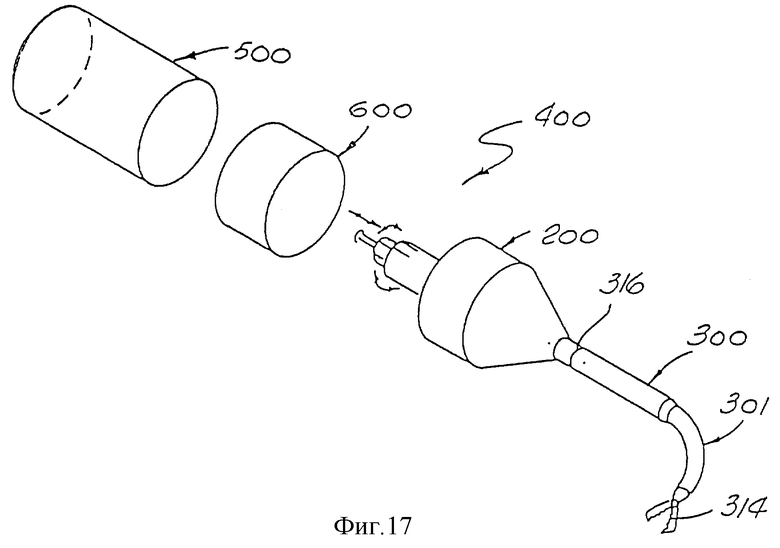
фиг.17 представляет собой перспективный вид узла привода инструмента по настоящему изобретению,
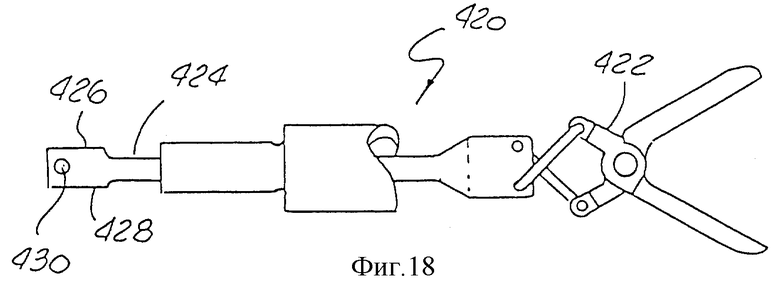
фиг.18 представляет собой вид съемного кончика инструмента в соответствии с шарнирным инструментом по настоящему изобретению,
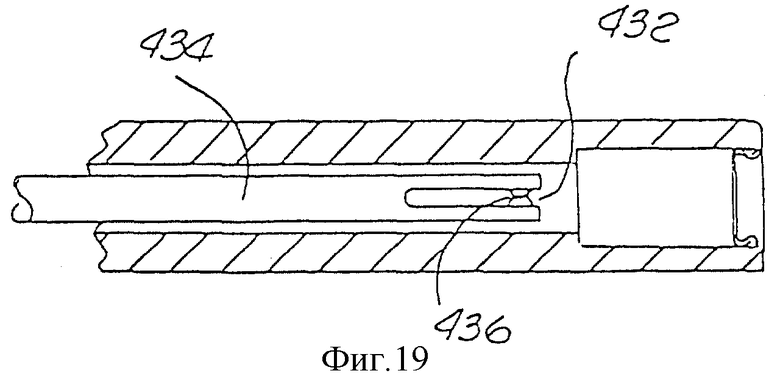
фиг.19 представляет собой гнездо кончика инструмента по настоящему изобретению,
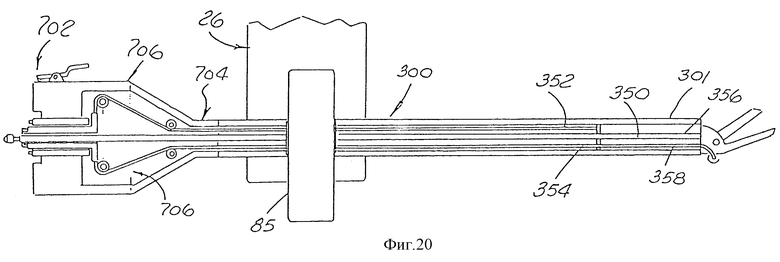
фиг.20 представляет собой вид в разрезе шарнирного инструмента, прикрепленного к шарнирному преобразователю по настоящему изобретению,
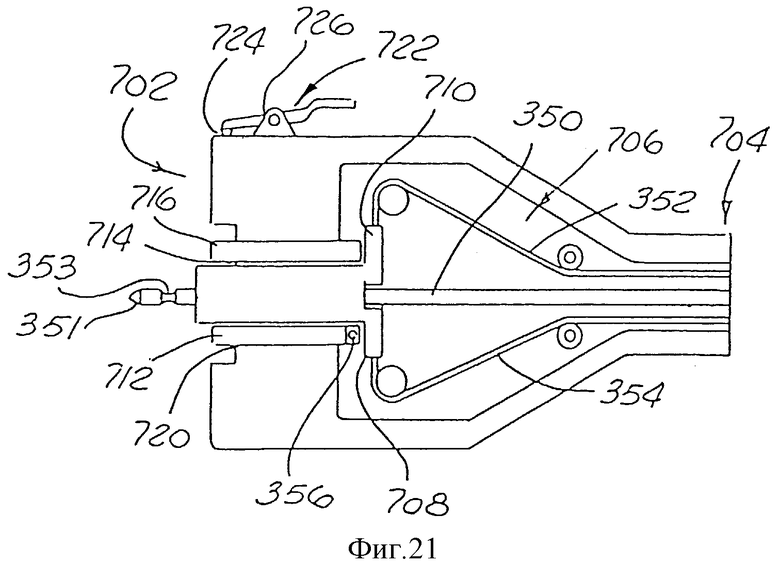
фиг.21 представляет собой крупноплановый вид в разрезе шарнирного преобразователя по настоящему изобретению,
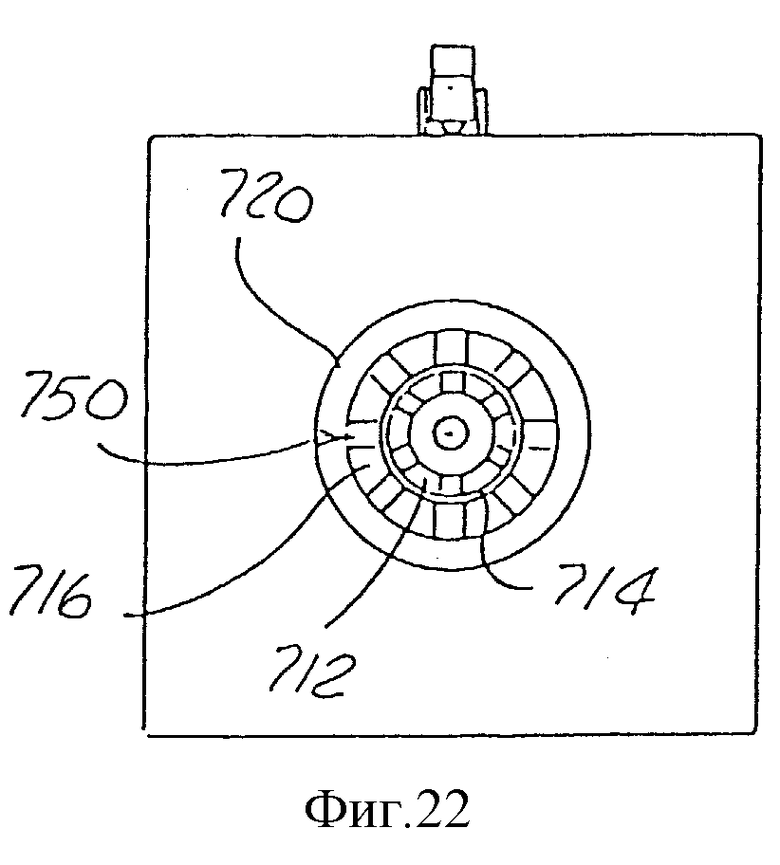
фиг.22 представляет собой концевой вид шарнирного преобразователя по настоящему изобретению,
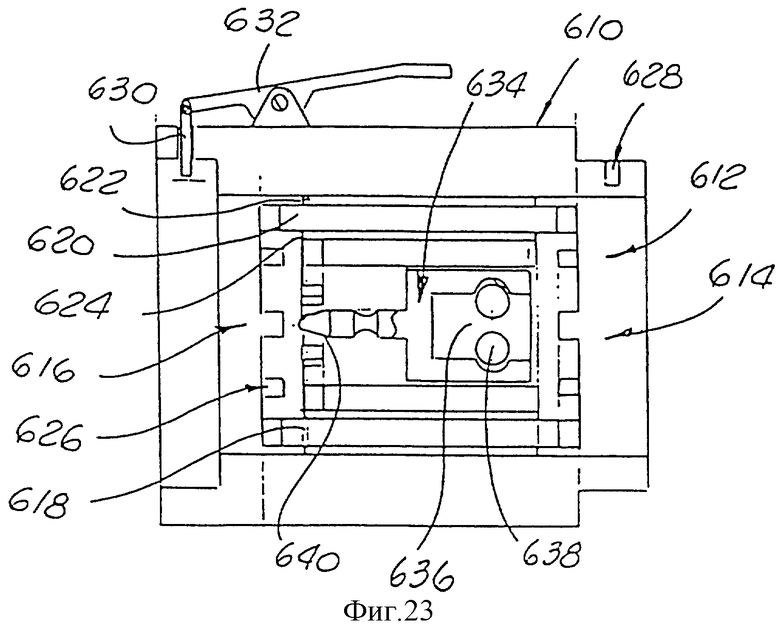
фиг.23 представляет собой вид в разрезе стерильной части узла привода шарнирного инструмента в соответствии с системой по настоящему изобретению,
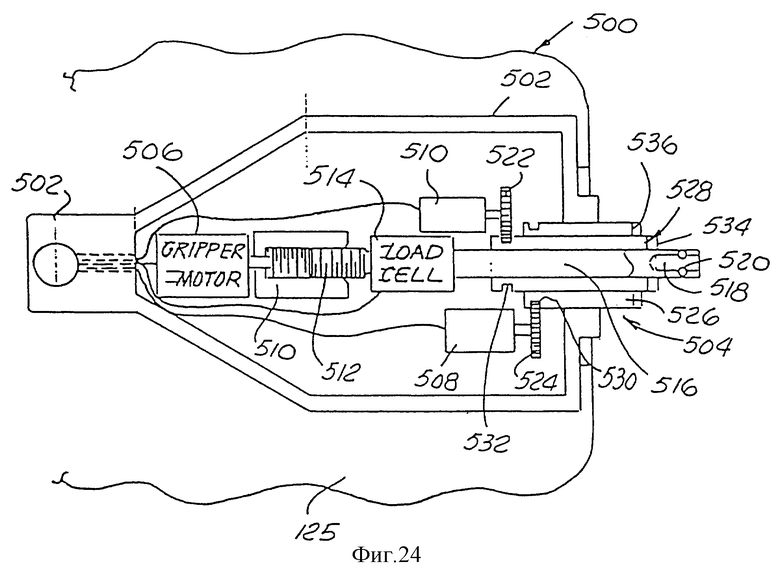
фиг.24 представляет собой вид в разрезе привода инструмента узла привода шарнирного инструмента в соответствии с системой по настоящему изобретению,
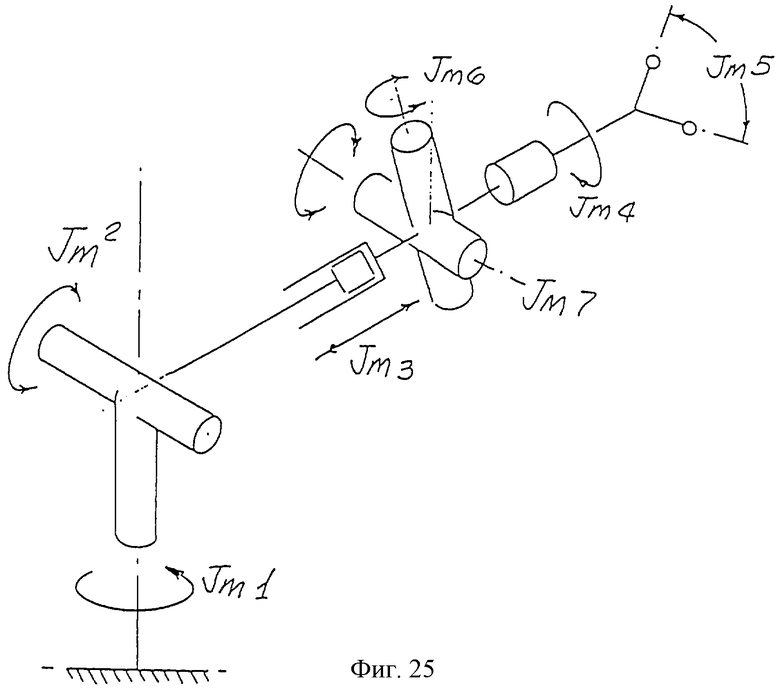
фиг.25 представляет собой схему управляющей части системы по настоящему изобретению, которая включает узел привода шарнирного инструмента,
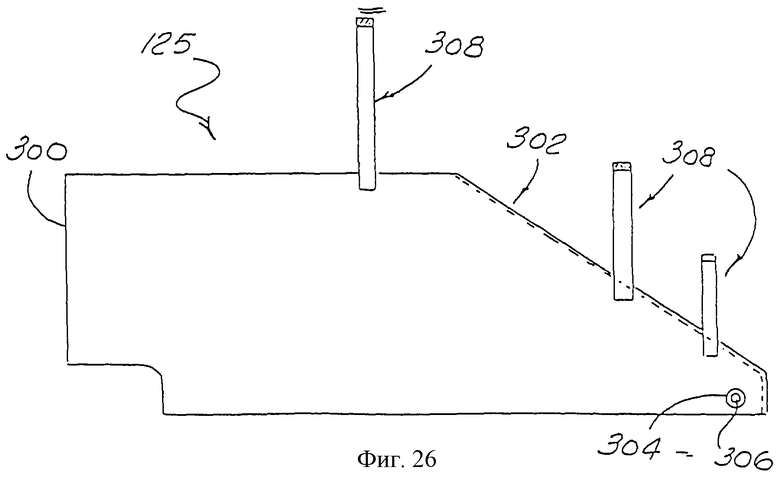
фиг.26 представляет собой план чехла для использования с манипулятором робота по настоящему изобретению,
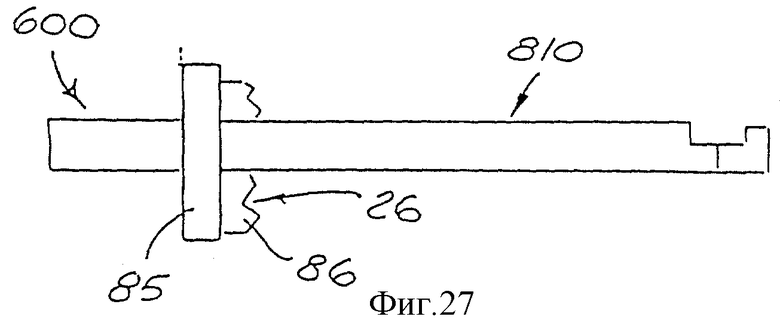
фиг.27 представляет собой план хирургического инструмента, имеющего сшивающий скобами инструмент, расположенный на его конце, и где хирургический инструмент прикреплен к манипулятору робота по настоящему изобретению,
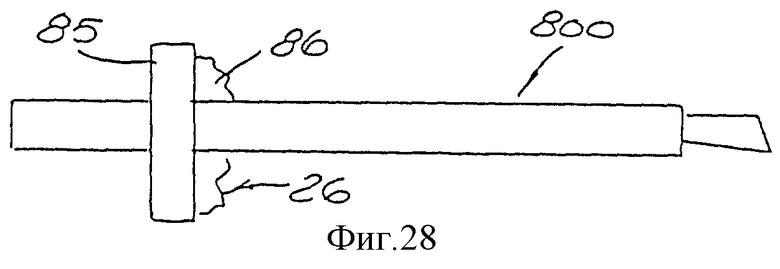
фиг.28 представляет собой план хирургического инструмента, имеющего режущее лезвие, расположенное на его конце, где инструмент прикрепляется к манипулятору робота по настоящему изобретению,
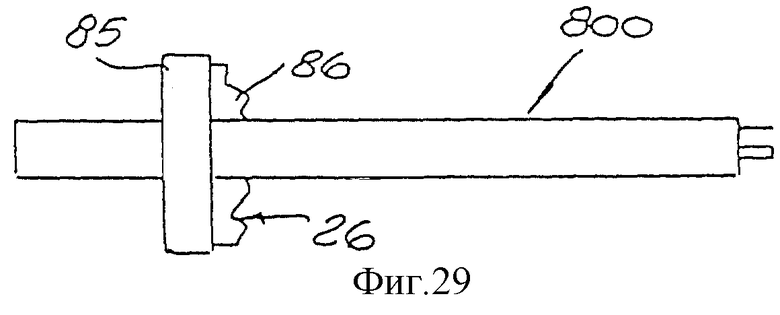
фиг.29 представляет собой план хирургического инструмента, имеющего коагулирующее/режущее устройство, расположенное на его конце, где инструмент прикреплен к манипулятору робота по настоящему изобретению, и
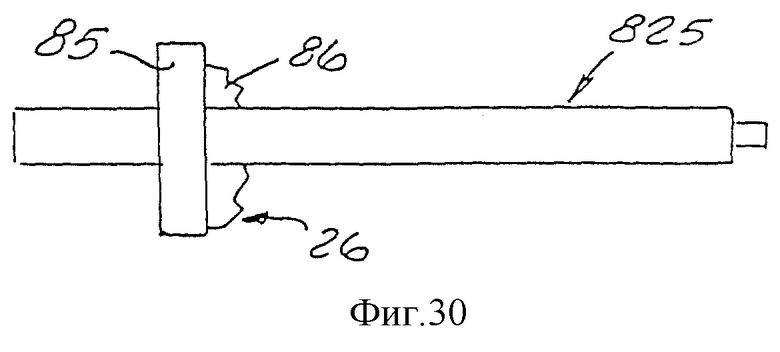
фиг.30 представляет собой план хирургического инструмента, имеющего сшивающий скобами инструмент, расположенный на его конце, и где хирургический инструмент прикрепляется к манипулятору робота по настоящему изобретению.
Подробное описание изобретения
При обращении к чертежам более конкретно в порядке их нумерации видно, что фиг.1 показывает систему 10, которую можно использовать для проведения минимально инвазивных операций. В предпочтительном воплощении систему 10 можно использовать для осуществления минимально инвазивного шунтирования коронарной артерии или эндоскопического шунтирования коронарной артерии (E-CABG) и других анастомозных операций. Несмотря на то что представлена и описана операция по MICABG, необходимо понимать, что систему можно использовать для других хирургических операций. Например, систему можно использовать для сшивания любой пары сосудов.
Система 10 используется для проведения операции у пациента 12, который обычно лежит на операционном столе 14. К операционному столу 14 смонтированы первый шарнирный манипулятор 16, второй шарнирный манипулятор 18 и третий шарнирный манипулятор 20. Шарнирные манипуляторы 16-20 предпочтительно смонтированы со столом таким образом, что манипуляторы находятся на одном контрольном уровне с пациентом. Будет также предпочтительным, если манипуляторы можно поместить на тележку или какое другое приспособление, в котором манипуляторы будут находиться проксимальнее уровня пациента. Несмотря на то что представлено и описано три шарнирных манипулятора, следует понимать, что система может иметь любое число манипуляторов, так, например, один или более манипуляторов.
Каждый из первого и второго шарнирных манипуляторов 16 и 18 имеет основной корпус 25 и узел манипулятора робота 26, выступающий из основного корпуса 25. Хирургические инструменты 22 и 24 предпочтительно съемно соединяются с концом каждого узла манипулятора робота 26 первого и второго шарнирных манипуляторов 16, 18. Каждый из инструментов 22, 24 может быть присоединен к соответствующему узлу манипулятора робота 26 различными способами, которые детально будут обсуждены ниже.
Третий шарнирный манипулятор 20 дополнительно включает основной корпус 25 и узел манипулятора робота 26 и предпочтительно имеет эндоскоп 28, который прикреплен к узлу манипулятора робота 26. Основной корпус 25 и узел манипулятора робота 26 каждого из шарнирных манипуляторов 16, 18 и 20 являются в основном одинаковыми. Однако необходимо понимать, что конфигурация третьего шарнирного манипулятора 20 может отличаться, поскольку предназначением третьего шарнирного манипулятора является удерживание и расположение эндоскопа 28, в отличие от удерживания и расположения хирургического инструмента.
Инструменты 22 и 24 и эндоскоп 28 вводят через разрезы, сделанные на коже пациента 12. Эндоскоп 28 имеет камеру 30, которая соединена с монитором 32, который показывает изображение внутренних органов пациента 12.
Каждый узел манипулятора робота 26 имеет основной двигатель 34, который линейно движет узел манипулятора 26 относительно основного корпуса 25, как показано стрелками Q. Каждый узел манипулятора робота 26 также включает первый вращательный двигатель 36 и второй вращательный двигатель 38. Каждый из узлов манипулятора робота 26 может иметь пару пассивных соединений 40 и 42. Пассивные соединения 40, 42 предпочтительно располагаются ортогонально по отношению друг к другу для обеспечения шарнирного движения инструмента 22, 24 или эндоскопа 28, который прикрепляется к соответствующему узлу манипулятора робота 26. Пассивные соединения могут быть пружинными со смещением в любом определенном направлении, однако они не ведутся двигателем. Узел манипулятора робота 26 также может иметь соединительный механизм 45 для присоединения к нему инструментов 22 и 24 или эндоскопа 28. Кроме того, каждый узел манипулятора робота 26 имеет двигатель, ведомый червячной шестерней 44, для вращения инструмента 22, 24 или эндоскопа 28, прикрепленных к нему относительно его продольной оси. Конкретнее, двигатель, ведомый червячной шестерней, вращает инструменты и эндоскоп.
Первый, второй и третий шарнирные манипуляторы 16, 18 и 20 соединены с контроллером 46, который может управлять движением манипуляторов. Манипуляторы подсоединены к контроллеру 46 посредством электропровода, кабеля или системы передатчик-приемник таким образом, что управляющие сигналы могут проходить от контроллера 46 к каждому из шарнирных манипуляторов 16, 18 и 20. Предпочтительно для обеспечения свободной от ошибок связи между каждым из шарнирных манипуляторов 16, 18 и 20 и контроллером 46 каждый манипулятор 16, 18 и 20 электрически соединяется с контроллером, и, например, каждый манипулятор 16, 18 и 20 электрически соединяется с контроллером 46 посредством электрокабеля 47. Однако возможно управлять каждым манипулятором 16, 18 и 20 дистанционно, используя хорошо известные дистанционные системы в противоположность прямым электрическим связям. По существу, такие дистанционные системы хорошо известны в этой области, и в дальнейшем они не будут здесь обсуждаться.
Контроллер 46 соединен с входным устройством 48, таким как ножная педаль, ручной контроллер, устройство, распознающее голос. Для примера здесь раскрывается ножной контроллер. Входное устройство 48 может управляться хирургом для изменения положения эндоскопа 28 и обзора различных органов пациента нажатием соответствующей кнопки (кнопок), расположенной на входном устройстве 48. Контроллер 46 получает входные сигналы от входного устройства 48 и передвигает эндоскоп 28 и узел манипулятора робота 26 третьего шарнирного манипулятора 20 в соответствии со входными командами хирурга. Каждый из узлов манипулятора робота 26 может представлять собой устройства, которые продаются представителем настоящего изобретения Computer Motion, Inc. of Goleta, California, с торговой маркой AESOP. Система также описана в патенте США № 5515478, который здесь приведен для ссылки. Несмотря на то что показана и описана ножная педаль 49, необходимо понимать, что система может иметь другие входные средства, такие как ручной контроллер или устройства, распознающие речь.
Движение и расположение инструментов 22, 24, прикрепленных к первому и второму шарнирным манипуляторам 16 и 18, управляются хирургом с помощью пары управляющих ручек 50 и 52. Каждая из управляющих ручек 50, 52, которыми может манипулировать хирург, имеет связь "управление - подчинение" с соответствующим одним из шарнирных манипуляторов 16, 18 таким образом, что движение ручки 50 или 52 производит соответствующее движение хирургического инструмента 22, 24, прикрепленного к шарнирным манипуляторам 16, 18.
Ручки 50 и 52 могут быть установлены на передвижном ящике 54. Второй телевизионный монитор 56 можно поместить в ящик 54, присоединить к эндоскопу посредством хорошо известных способов таким образом, что хирург смог бы легко обозревать внутренние органы пациента 12. Ручки 50 и 52 также соединены с контроллером 46. Контроллер 46 получает входные сигналы от ручек 50 и 52, рассчитывает соответствующее движение хирургических инструментов и обеспечивает выходные сигналы для движения узла манипулятора робота 26 и инструментов 22, 24. Поскольку хирург может управлять движением и ориентацией инструментов 22, 24, не держа фактически концы инструментов, хирург может использовать систему 10 по настоящему изобретению как в сидячем, так и стоячем положении. Одним из преимуществ настоящего изобретения является то, что хирург может осуществлять эндоскопические операции в сидячем положении. Это позволяет хирургу меньше уставать и может улучшить выполнение и результаты в операционной, особенно во время таких операций, которые имеют многочасовую продолжительность. В качестве приспособления для сидячего положения система может быть обеспечена креслом 57.
Каждая ручка имеет множественные степени свободы, обеспеченные различными соединениями Jm1-Jm5, изображенными на фиг.2. Соединения Jm1 и Jm2 позволяют ручке вращаться вокруг точки опоры в ящике 54. Соединение Jm3 позволяет хирургу передвигать ручку внутрь и из ящика 54 линейно. Соединение Jm4 позволяет хирургу вращать управляющими ручками относительно оси ручки. Соединение Jm5 позволяет хирургу открывать и закрывать захватное устройство.
Каждое соединение Jm1-Jm5 имеет один или более датчиков положения, которые обеспечивает сигналы обратной связи, соответствующие относительному положению ручки. Датчиками положения могут быть потенциометры или любые другие устройства, действующие по принципу обратной связи, такие как вращающийся оптический кодировщик, который обеспечивает электрические сигналы, соответствующие изменению положения. Кроме того, множество датчиков положения можно поместить в каждое соединение для обеспечения избытка в системе, которые можно использовать для предупреждения хирурга о нарушениях функций или неправильном положении соответствующего узла манипулятора робота 26.
В дополнение к датчикам положения каждое соединение может включать тахометры, измерители ускорения и нагрузочные элементы индикации силы, каждый из которых может обеспечивать электрические сигналы, относящиеся к скорости, ускорению и силе, прилагаемым к соответствующему соединению. Дополнительно в каждое соединение могут включаться приводы для отражения силовой обратной связи, полученной на узле манипулятора робота 26. Это может быть особенно полезным на соединении Jm5 для индикации силы, с которой неожиданно столкнулось внутри пациента захватное устройство, расположенное на конце инструментов 22 и 24. По существу, в захватное устройство инструмента 22, 24 должен быть включен элемент, отражающий силу, в целях приведения в действие подобной петли обратной связи, отражающей силу. Элементы, отражающие силу, такие как пьезоэлектрические элементы в комбинации с мостом Уитстона, являются хорошо известными в этой области. Однако ранее не было известно об использовании такого отражения силы с подобной системой 10.
Фиг.3 показывает различные степени свободы каждого шарнирного манипулятора 16 и 18. Соединения Js1, Js2 и Js3 соответствуют осям движения основного двигателя 34 и вращательных двигателей 36, 38 узла манипуляторов робота 26 соответственно. Соединения Js4 и Js5 соответствуют пассивным соединениям 40 и 42 манипуляторов 26. Соединение Js6 может быть двигателем, который вращает хирургические инструменты относительно продольной оси инструмента. Соединение Js7 может быть парой пальцев, которые могут открывать и закрывать. Инструменты 22 и 24 двигаются относительно точки опоры Р, расположенной на разрезе у пациента.
Фиг.4 показывает схему управляющей системы, которая передает движение управляющей ручки в соответствующее движение хирургического инструмента. В соответствии с управляющей системой, представленной на фиг.4, контроллер 46 рассчитывает выходные сигналы для шарнирных манипуляторов таким образом, что хирургические инструменты движутся вместе с движением ручки. Каждая ручка может иметь входную кнопку 58, которая дает возможность инструменту двигаться вместе с ручкой. Когда входная кнопка 58 утоплена, хирургический инструмент следует за движением ручки. Когда кнопка 58 высвобождается, инструмент не следует за движением ручки. Таким образом, хирург может регулировать или останавливать при помощи "храпового" механизма положение ручки, не производя соответствующего нежелательного движения инструмента. Особенность "храповика" позволяет хирургу постоянно двигать ручками до более желаемых положений, не изменяя положений манипуляторов. Кроме того, поскольку ручки сдерживаются точкой опоры, свойство "храповика" позволяет хирургу двигать инструментом за пределами пространственных ограничений ручек. Несмотря на то что показана и описана входная кнопка 58, необходимо понимать, что хирургический инструмент может активироваться другими средствами такими, как устройство, распознающее голос. Альтернативно входная кнопка может быть заперта таким образом, что движение соответствующего инструмента находится между активным и неактивным всякий раз, когда хирург нажимает на кнопку.
Когда хирург двигает ручкой, датчики положения обеспечивают сигналы обратной связи М1-М5, которые соответствуют движению соединений Jm1-Jm5 соответственно. Контроллер 46 рассчитывает разницу между новым положением ручки и исходным положением ручки в компьютерном блоке 60 для воспроизведения дифференциальных значений положения М1-М5.
Дифференциальные значения положения М1-М5 увеличиваются с помощью масштабных коэффициентов S1-S5 соответственно в блоке 62. Масштабные коэффициенты обычно устанавливаются на уровне менее единицы, и в результате движение инструмента меньше, чем движение ручки. Таким образом, хирург может производить очень тонкие движения инструментов при относительно грубых движениях ручек.
Масштабные коэффициенты S1-S5 являются переменными величинами, и хирург может менять разрешающую способность движения инструмента. Каждый масштабный коэффициент предпочтительно варьируется индивидуально и, таким образом, хирург может более точно управлять движением инструмента в определенных направлениях. В качестве примера при установлении одного из масштабных коэффициентов на нуле хирург может предотвратить движение инструмента в одном направлении. Это может иметь преимущество, если хирург не хочет, чтобы хирургический инструмент контактировал с органом или определенной тканью, расположенными в определенном направлении по отношению к пациенту. Несмотря на то что описаны масштабные коэффициенты меньше, чем единица, необходимо понимать, что масштабный коэффициент может быть выше единицы. Например, может быть желательно вращать инструмент с большей скоростью, чем соответствующее вращение ручки.
Контроллер 46 добавляет дифференциальные значения М1-М5 к первоначальным углам соединений Mj1-Mj5 в суммирующем элементе 64 для обеспечения значений Мr1-Мr5. Затем контроллер 46 проводит вычисления желаемых рабочих векторов в компьютерном блоке 66 по следующим уравнениям:
Rdx=Mr3·sin(Mr1)·cos(Mr2)+Px;
Rdy=Mr3·sin(Mr1)·sin(Mr2)+Py;
Rdz=Mr3·cos(Mr1)+Pz;
Sdr=Mr4;
Sdg=Mr5;
где Rdx, y, z = новому желаемому положению концевого исполнительного механизма инструмента;
Sdr = угловому вращению инструмента относительно продольной оси инструмента;
Sdg = количеству движения пальцев инструмента;
Рх, у, z = положению точки опоры Р.
Контроллер 46 затем рассчитывает движение манипулятора робота 26 в компьютерном блоке 68 по следующим уравнениям:
Jsd1=Rdz;

Jsd2=tan-1(Rdy/Rdx)+Δ для Jsd3≤0;
Jsd2=tan-1(Rdy/Rdx)-Δ для Jsd3>0;
Jsd6=Mr4,
Jsd7=Mr5,
где Jsd1 = движению линейного двигателя;
Jsd2 = движению первого вращательного двигателя;
Jsd3 = движению второго вращательного двигателя;
Jsd6 = движению вращающегося двигателя;
Jsd7 = движению захватного устройства;
L1 = длине соединительного плеча между первым вращательным и вторым вращательным двигателями;
L2 = длине соединительного плеча между вторым вращательным двигателем и пассивными соединениями.
Контроллер обеспечивает выходные сигналы к двигателям для движения манипулятора и инструмента в желаемом направлении в блоке 70. Этот процесс повторяется для каждого движения ручки.
Управляющая ручка будет иметь различное пространственное положение по отношению к хирургическому инструменту, если хирург освобождает или нажимает входную кнопку и двигает ручкой. Когда первоначально входная кнопка 58 утоплена, контроллер 46 рассчитывает первоначальные значения углов соединений Mj1-Mj5 в компьютерном блоке 72 по следующим уравнениям:
Мj1=tan-1(ty/tx);
Mj2=tan-1(d/tz);
Mj3=D;
Mj4=Js6;
Мj5=Js7;


В блоке 74 рассчитываются следующие отправные кинематические значения по следующим уравнениям.
Rsx=L1·cos(Js2)+L2·cos(Js2+Js3);
Rsy=L1·cos(Js2)+L2·sin(Js2+Js3):
Rsz=J1
Углы соединений Mj обеспечиваются для суммирующего блока 64. Точки опоры Px, Py и Pz рассчитываются в компьютерном блоке 76 следующим образом. Точка опоры вычисляется при первоначальном определении исходного положения пересечения концевого исполнительного механизма и инструмента РО и единичного вектора U0, который имеет ту же ориентацию, что и инструмент. Значения положения Р(х, у, z) могут быть получены от различных датчиков положения манипулятора робота. Как видно из фиг.5, инструмент находится внутри первой системы координат (х, у, z), которая имеет углы 94 и 95. Единичный вектор U0 вычисляется по преобразовательной матрице:
После каждого движения концевого исполнительного механизма вычисляется угловое движение инструмента Δθ взятием arcsin произведения первого и второго единичных векторов U0 и U1 инструмента по следующим линейным уравнениям L0 и L1.
Δθ=аrсsin(|η)
T=U0×U1,
где Т=вектор, который является произведением единичных векторов U0 и U1.
Единичный вектор нового положения инструмента U1 вновь определяется с использованием датчиков положения и преобразовательной матрицы, описанных выше. Если угол больше, чем пороговое значение, тогда вычисляется новая точка опоры и U0 устанавливается до U1. Как показано на фиг.6, первую и вторую ориентации инструмента можно определить по линейным уравнениям L0 и L1:
L0:
Х0=Mx0·Z0+Сх0
Y0=My0·Z0+Су0
L1:
X1=Mx1·Z1+Cx1
Y1=My1·Z1+Cy1,
где Z0 = координате Z по линии L0 относительно оси Z в первой системе координат;
Z1 = координате Z по линии L1 относительно оси Z в первой системе координат;
Мх0 = наклону линии L0 как функции от Z0;
Му0 = наклону линии L0 как функции от Z0;
Мх1 = наклону линии L1 как функции от Z1;
Му1 = наклону линии L1 как функции от Z1;
Сх0 = константе, которая представляет точку пересечения линии L0 и оси х в первой системе координат;
Су0 = константе, которая представляет точку пересечения линии L0 и оси у в первой системе координат;
Cx1 = константе, которая представляет точку пересечения линии L1 и оси х в первой системе координат;
Cy1 = константе, которая представляет точку пересечения линии L1 и оси у в первой системе координат.
Наклоны вычисляются с использованием следующих алгоритмов:
Мх0=Ux0/Uz0;
Му0=Uy0/Uz0;
Mx1=Ux1/Uz1;
My1=Uy1/Uz1;
Сх0=P0x-Mx1·P0z;
Cy0=P0y-My1P0z;
Cx1=P1x-Mx1·P1z;
Cy1=P1y-My1·P1z;
где U0 (x, y, z) = единичным векторам инструмента в первом положении внутри первой системы координат;
U1 (x, у, z) = единичным векторам инструмента во втором положении внутри первой системы координат;
Р0 (x, у, z) = координатам точки пересечения концевого исполнительного механизма и инструмента в первом положении внутри первой системы координат;
Р1 (x, у, z) = координатам точки пересечения концевого исполнительного механизма и инструмента во втором положении внутри первой системы координат.
Для установления примерного нахождения точки опоры определяют точки опоры инструмента в первой ориентации L0 (точка опоры R0) и во второй ориентации L1 (точка опоры R1) и вычисляют половину пути между двумя точками R0 и R1 и сохраняют в качестве точки опоры Rave инструмента. Точку опоры Rave определяют, используя произведение вектора Т.
Для установления точек R0 и R1 используют следующие равенства в целях определения линии с той же ориентацией, что и вектор Т, которая проходит как через L0, так и L1.
tx=Tx/Tz;
ty=Ty/Tz,
где tx = наклону линии, определяемой вектором Т по отношению к плоскости Z-X в первой системе координат;
ty = наклону линии, определяемой вектором Т по отношению к плоскости Z-Y в первой системе координат;
Тх = составляющей х вектора Т;
Ту = составляющей у вектора Т;
Tz = составляющей z вектора Т;
Выбор двух точек для определения наклонов Тх, Ту и Tz (например, Тх=х1-х0, Ту=у1-у0 и Tz=z1-z0) и подставление в линейные уравнения L0 и L1 обеспечивает установление координат точки R0 (x0, y0, z0) и R1 (x1, y1, z1) следующим образом:
Z0=((Мх1-tx)z1+Cх1-Сх0)/(Мх0-tx);
Z1=((Cy1-Cy0)(Mx0-tx)-(Cx1-Cx0)(My0-ty))/((My0-ty)(Mx1-tx)-(My1-ty)(Mx0-tx))
y0=My0·z0+Cy0;
y1=My1·z1+Cy1;
x0=Mx0·z0+Cx0;
x1=Mx1·z1+Cx1
Среднее расстояние между точками опоры R0 и R1 вычисляют по следующему уравнению и хранят как точку опоры инструмента.
Rave=((x1+х0)/2,(у1+y0)/2,(z1+z0)/2).
Точку опоры постоянно приводят в соответствие с использованием вышеописанных алгоритмов. Любые движения точки опоры можно сравнить с пороговым значением, и может быть выдан предупреждающий сигнал или система робота может стать разъединенной, если точка опоры движется ниже установленного предела. Сравнение с установленным пределом может быть полезным для определения того, движется ли пациент или инструмент манипулирует вне пациента, ситуации, при которых может иметь место травмирование пациента или находящихся в операционной людей.
Для обеспечении обратной связи для хирурга пальцы инструмента могут иметь датчики давления, которые улавливают силу реакции, оказываемую объектом, который захватывается концевым исполнительным механизмом. Как видно из фиг.4, контроллер 46 получает сигналы от датчика давления Fs и воспроизводит соответствующие сигналы (m в блоке 78), которые поступают в привод, расположенный внутри ручки. Привод обеспечивает соответствующее давление на ручке, которое передается рукам хирурга. Обратная связь давления позволяет хирургу ощущать давление, прилагаемое инструментом. В качестве альтернативы ручка может быть соединена с пальцами концевого исполнительного механизма с помощью механического кабеля, который непосредственно транслирует силу сжатия у пальцев рукам хирурга.
Фиг.7 показывает предпочтительное воплощение концевого исполнительного механизма 80, который можно использовать в настоящем изобретении. Концевой исполнительный механизм 80 включает в себя хирургический инструмент 82, такой как 22, 24, раскрытый здесь выше, который прикреплен к приводу инструмента 64, вставляемого спереди. Концевой исполнительный механизм 80 смонтирован к одному из узлов манипулятора робота 26 с помощью соединительного механизма 45. Соединительный механизм 45 включает втулку 85, которая съемно прикрепляется к держателю 86. Держатель 86 включает червячную шестерню 87, которая приводится в движение двигателем в узле манипулятора робота 26 для вращения втулки 85 и затем вращения инструмента 82 относительно продольной оси. Держатель 86 включает стержень 88, который входит в паз в узле манипулятора робота 26. Стержень 88 может поворачиваться под действием двигателя в узле манипулятора, который затем вращает червячную шестерню 87 и таким образом вращает втулку 86 и инструмент 82. Можно использовать затягивающий инструмент 89 для затягивания и ослабления втулки вокруг инструмента 82. Такой инструмент действует подобно патронному ключу ддя затягивания и ослабления втулки 86.
Хирургический инструмент 82 имеет первый палец 90, который шарнирно связан со вторым пальцем 91. Пальцами 90, 91 можно манипулировать для удержания объектов, таких как ткань или игла, для наложения швов. Внутренняя поверхность пальцев может иметь текстуру для увеличения трения и способности зажимать у инструмента 82. Первый палец 90 связан со стержнем 92, который проходит через центральный канал 94 инструмента 82. Инструмент 82 может иметь внешнюю муфту 96, которая взаимодействует с пружинным шаровым быстроразъединящим замком со смещением 98. Быстрый размыкатель 98 позволяет инструментам иным, чем пальцевое захватывающее устройство, связываться с приводом инструмента 84, вставляемого спереди. Например, инструмент 82 можно отсоединить от быстрого размыкателя 98 и заменить на режущий инструмент, инструмент для наложения швов, сшивающий скобами инструмент, адаптированный для использования в этой системе, такой как сшивающий скобами аппарат, раскрытый в патенте США No 5499990 или 5389103 по Karlsruhe, режущее лезвие или другие хирургические инструменты, используемые в минимально инвазивной хирургии. Быстрый размыкатель 98 позволяет хирургическим инструментам быть взаимозаменяемыми без повторной стерилизации привода инструмента 84, вставляемого спереди, каждый раз, когда инструмент вставляется в привод инструмента 84. Функционирование привода инструмента 84, вставляемого спереди, будет в дальнейшем детально обсуждаться ниже.
Быстрый размыкатель 98 имеет паз 100, в который входит штифт 102 привода инструмента 84, вставляемого спереди. Штифт 102 запирает быстрый размыкатель 98 к переднему загрузочному приводу инструмента 100. Штифт 102 может освобождаться при нажатии на пружинный рычаг со смещением 104. Быстрый размыкатель 98 имеет поршень 106, который прикреплен к стержню инструмента 92 и примыкает к выходному поршню 108 нагрузочного элемента 110, расположенного внутри привода инструмента 84, вставляемого спереди.
Нагрузочный элемент 110 монтируется к направляющей гайке 112. Направляющая гайка 112 соединена с направляющим винтом 114, который выходит из коробки передач 116. Коробка передач 116 запускается реверсивным двигателем 118, который соединен с кодировщиком 120. Целый концевой исполнительный механизм 80 вращается под действием двигателя, ведомого червячной шестерней 87.
При работе двигатель 118 привода инструмента 84, вставляемого сзади, получает входные команды от контроллера 46 через электропровод или систему передатчик-приемник и соответственно активируется. Двигатель 118 вращает направляющий винт 114, который линейно двигает направляющую гайку 112 и нагрузочный элемент 110. Движение нагрузочного элемента 110 запускает поршень соединительного механизма 106 и стержень инструмента 92, который вращает первый палец 88. Нагрузочный элемент 110 воспринимает противодействующую силу, прилагаемую к пальцам, и обеспечивает соответствующий обратный сигнал к контроллеру 46.
Привод инструмента 84, вставляемого спереди, может быть покрыт стерильным чехлом 124 таким образом, что привод инструмента 84 не нужно стерилизовать после каждой хирургической операции. Кроме того, узел манипулятора робота 26 предпочтительно закрывают стерильным чехлом 125 таким образом, что его также не нужно стерилизовать. Чехлы 124, 125 в основном служат в качестве средств для закрывания привода инструмента 84, вставляемого спереди, и узла манипулятора робота 26. Чехол 125, используемый для покрытия узла манипулятора робота 26, изображен в дополнительных деталях на фиг.26. Чехол 125 имеет по существу открытый конец 300, через который узел манипулятора робота 26 может быть помещен в чехол 125. Чехол 125 дополнительно включает конусообразный, по существу закрытый конец 302, который эффективно отделяет узел манипулятора робота 26 от окружающей среды операционной.
Прокладка 304 имеет небольшое отверстие 306, выполненное насквозь, которое позволяет инструменту быть связанным с узлом манипулятора робота 26 посредством соединительного механизма 45. Прокладка 304 усиливает жесткость чехла 125 для гарантии того, что чехол 125 не разорвется во время движения узла манипулятора робота 26. По существу, инструмент не может быть закрыт чехлом 125, поскольку он вводится пациенту 12. Чехол 125 также имеет множество лент 308, покрытых липким слоем 310. По меньшей мере, одна часть лент 308 располагается противоположно друг другу для закрывания чехла 125 вокруг узла манипулятора робота 26.
На фиг.8 и 8А представлено предпочтительное воплощение управляющей ручки 130. Узел управляющей ручки 130 включает управляющую ручку 132, которая соединена с плечом 134. Управляющая ручка 132 может быть соединена с плечом 134 посредством штифта 136, который входит в соответствующий паз 138 в ручке 132. Ручка 132 имеет контрольную кнопку 140, на которую может нажимать хирург. Контрольная кнопка 140 соединена с переключателем 142 посредством стержня 144. Контрольная кнопка 140 соответствует входной кнопке 58, представленной на фиг.4, и приводит в движение концевой исполнительный механизм.
Управляющая ручка 132 имеет первое захватное устройство 146, которое шарнирно соединено со вторым стационарным захватным устройством 148. Вращение первого захватного устройства 146 создает соответствующее линейное движение стержня ручки 150. Стержень ручки 150 двигает стержень захватного устройства 152, который соединен с нагрузочным элементом 154 посредством подшипника 156. Нагрузочный элемент 154 воспринимает величину давления, приходящегося на него, и обеспечивает входной сигнал для контроллера 46. Затем контроллер 46 обеспечивает выходной сигнал для движения пальцев концевого исполнительного механизма.
Нагрузочный элемент 154 смонтирован с направляющей гайкой 158, которая соединена с направляющим винтом 160. Направляющий винт 160 выступает из преобразовательной коробки 162, которая соединена с двигателем 164, имеющим кодировщик 166. Контроллер 46 системы получает сигнал обратной связи от нагрузочного элемента 110 в концевом исполнительном механизме и обеспечивает соответствующий командный сигнал для двигателя в целях движения ведущего винта 160 и прикладывает давление на захватное устройство таким образом, что хирург получает сигнал обратной связи, относящийся к силе, которая прилагается концевым исполнительным механизмом. Таким способом хирург имеет "чувство" для управления концевым исполнительным механизмом.
Ручка прикреплена к корпусу шарнира 168, который вращается относительно подшипника 170. Корпус шарнира 168 соединен с датчиком положения 172 с помощью узла зубчатой передачи 174. Датчик положения 172 может представлять собой потенциометр, который обеспечивает сигналы обратной связи для контроллера 46, которые соответствуют относительному положению ручки. Дополнительно для этой цели может быть использован оптический кодировщик. Альтернативно можно использовать как потенциометр, так и оптический кодировщик для обеспечения избытка в системе. Шарнирное движение передается к соответствующему спину конечного исполнительного механизма контроллером и узлом манипулятора робота.
Плечо 134 может быть соединено с линейным подшипником 176 и соответствующим датчиком положения, который позволяет и воспринимает линейное движение ручки. Линейное движение ручки преобразуется в соответствующее линейное движение концевого исполнительного механизма контроллером и узлом манипулятора робота. Плечо может вращаться относительно подшипников 180 и восприниматься датчиком положения 182, расположенным в стойке 184. Стойка 184 может вращаться относительно подшипника 186, который имеет соответствующий датчик положения 188. Вращение плеча преобразуется в соответствующее шарнирное движение концевого исполнительного механизма контроллером и узлом манипулятора робота.
Человеческая рука имеет естественный тремор, обычно резонирующий между 6-12 Гц. Для устранения следового движения хирургических инструментов, возникшего в результате тремора руки, система может иметь фильтр, который отфильтровывает любое движение ручек, которое имеет место в ширине полосы частот тремора. Как видно из фиг.4, фильтр 184 может отфильтровывать аналогичные сигналы, идущие от потенциометров в ширине частот между 6-12 Гц. Альтернативно для этой цели можно использовать оптический кодировщик и цифровой фильтр.
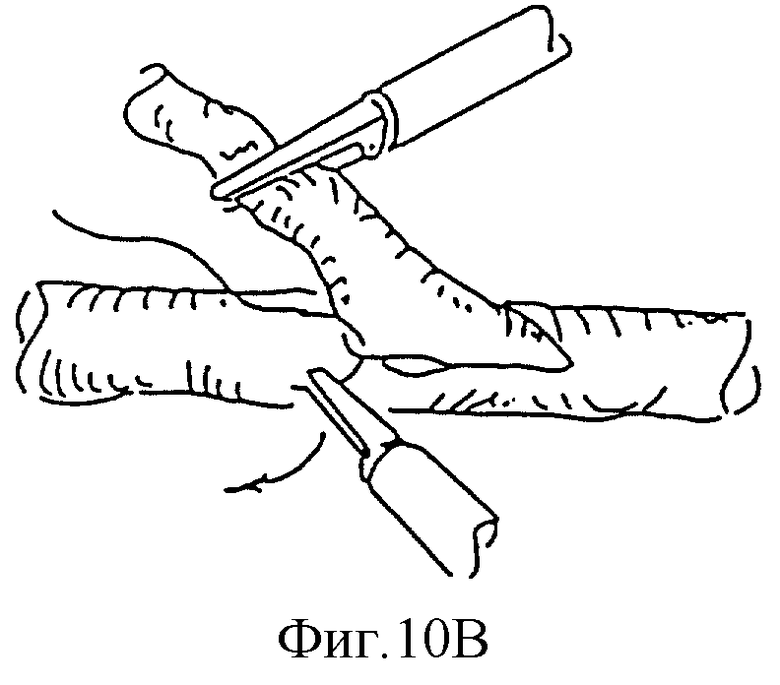
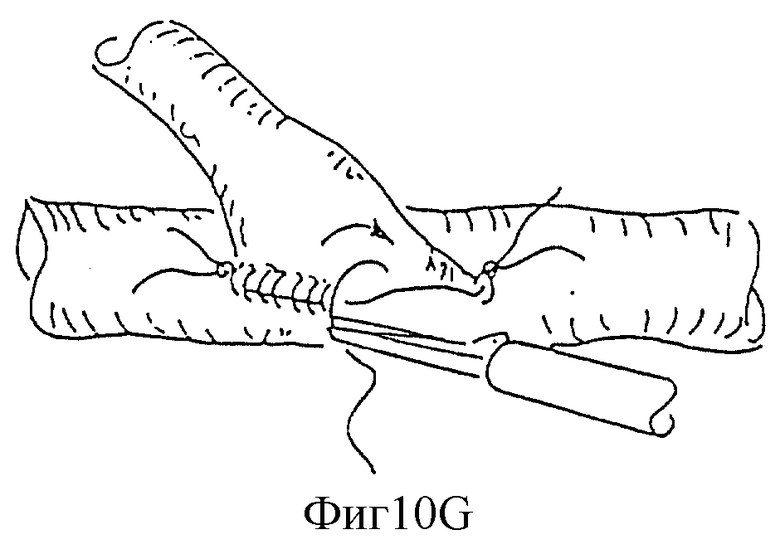
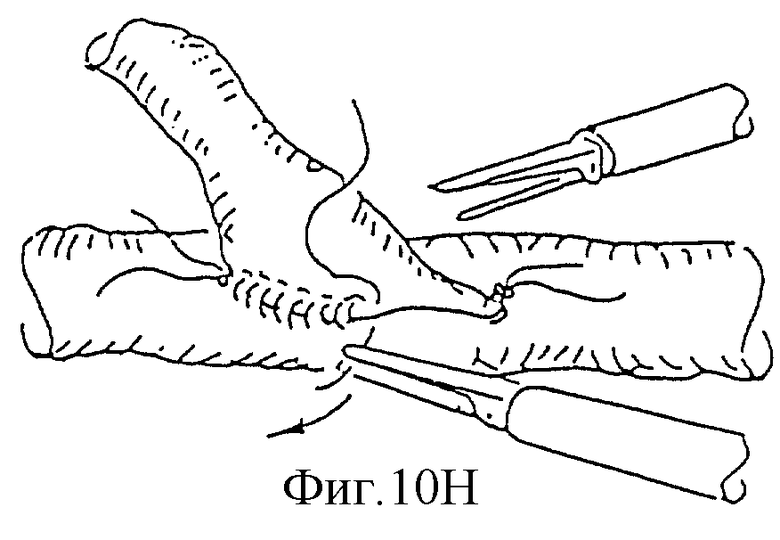
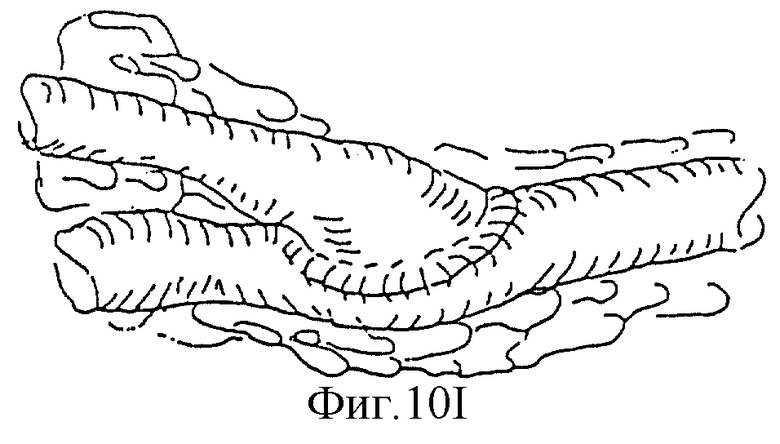
Как показано на фиг.9 и 10A-J, систему предпочтительно используют для операций на сердце, таких как шунтирование коронарной артерии (CABG). Операцию проводят при первоначальном выполнении трех надрезов у пациента и введении хирургических инструментов 22 и 24 и эндоскопа 28 через разрезы. Один из хирургических инструментов 22 поддерживает сшивающую иглу и продевает нить в иглу при введении в грудную полость пациента. Если к артерии подсаживают вторичный сосуд, такой как подкожная вена, другой хирургический инструмент 24 может поддерживать вену в то время, как концевой исполнительный механизм инструмента вводят пациенту.
Внутренняя грудная артерия (IMA) может быть отделена и передвинута с помощью одного из инструментов к месту шунтирования коронарной артерии. Коронарная артерия надрезается для создания входа в стенку артерии размером, который соответствует диаметру IMA. Разрез(ы) может выполняться с помощью режущего инструмента, который присоединен к одному из концевых исполнительных механизмов и дистанционно управляется с помощью управляющей ручки. Артерии зажимают для предотвращения кровотечения из надрезанных грудной и коронарной артерий. Хирург манипулирует ручкой для передвижения IMA к отверстию в коронарной артерии. Хотя показано и описано шунтирование IMA, необходимо понимать, что для шунтирования заблокированной коронарной артерии можно пересаживать другой сосуд, такой как отделенная подкожная вена.
Как показано на фиг.10A-J, хирург двигает ручкой, чтобы манипулировать инструментом для прохождения иглы через IMA и коронарную артерию. Хирург затем двигает хирургическим инструментом, чтобы захватить и продвинуть иглу через коронарную и пересаживаемую артерии, как показано на фиг.10В.
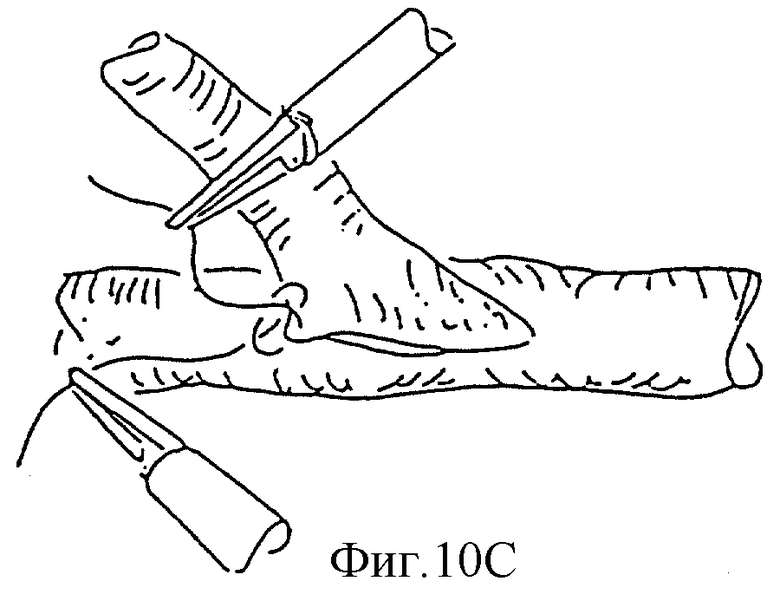
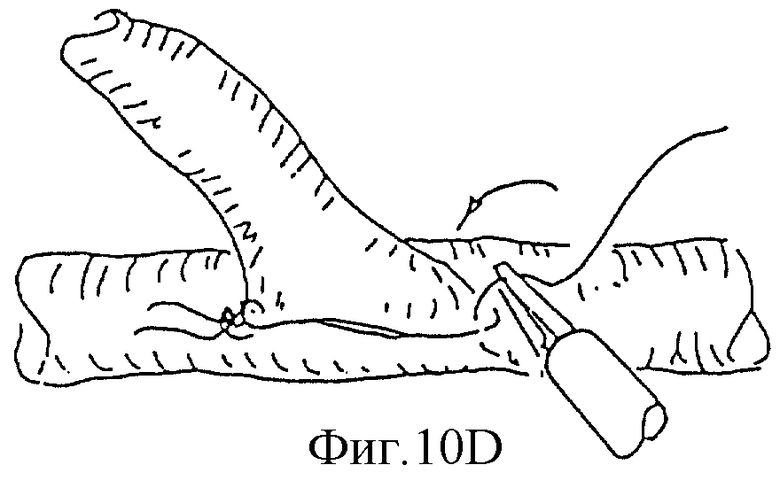
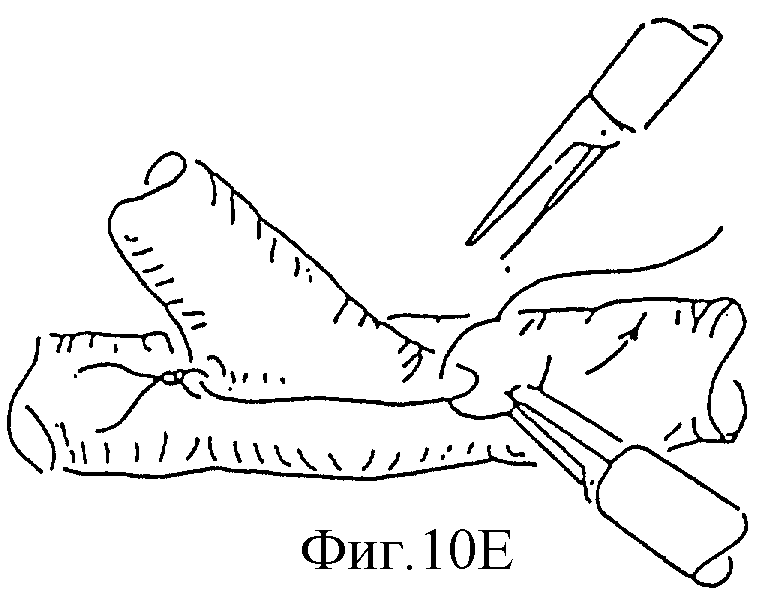
Как представлено на фиг.10С, хирургическими инструментами затем манипулируют для затягивания шва в задней части основания пересаживаемой артерии. Иглу затем можно удалить из грудной полости. Как показано на фиг.10D-F, новую иглу и нить можно ввести в грудную полость для пришивания основания пересаженной артерии к коронарной артерии. Как представлено на фиг.10H-J, можно ввести новые иглы, и хирург манипулирует ручками для выполнения бегущих швов от задней части через основание и через основание до задней части. Масштабный характер движения хирургического инструмента позволяет хирургу аккуратно делать швы в грудной полости. Несмотря на то что была показана и описана определенная последовательность пересадки сосуда, следует понимать, что артерии можно пересаживать с помощью других методов. В целом, систему настоящего изобретения можно использовать для проведения любой минимально инвазивной анастомозной операции.
Как было раскрыто выше, система может включать привод инструмента 84, вставляемого спереди, который получает сигналы управления от контроллера 46 в ответ на движение управляющей ручки 50 или 52 и ведет инструмент, расположенный на конце хирургического инструмента. Альтернативно привод инструмента 200, вставляемый сзади, можно включить в систему 10 по настоящему изобретению, как изображено на фиг.11 и 11А. Привод инструмента 200, вставляемого сзади, взаимодействует с задним загрузочным хирургическим инструментом 202. Включение подобного привода инструмента 200, вставляемого сзади, и инструмента 202 ускоряет смену инструмента во время операции, поскольку инструменты можно очень просто снимать с привода инструмента 200 и заменять на другие инструменты.
Привод инструмента 200, вставляемого сзади, прикрепляется к узлу манипулятора робота 26 посредством втулки и держателя, как было раскрыто выше. Привод инструмента, вставляемого сзади, включает в себя кожух 204, имеющий проксимальный конец 206 и дистальный конец 208. Кожух 204 может быть сделан из пластмассы или любого другого хорошо известного материала, который можно использовать при конструкции хирургических инструментов. Кожух 204, по существу, представляет собой полую трубку, которая смонтирована через втулку, затягивается на месте стяжным инструментом, который описывается более детально выше.
Задний загрузочный хирургический инструмент 202 имеет конец инструмента 210 и соединительный конец инструмента 212. Хирургический инструмент 214, такой как захватное устройство или любой другой инструмент, который может приводиться в движение системой стержня или кабеля толкания/вытягивания, или хирургический инструмент, который не требует подобного стержня или кабеля, такой как прижигающее устройство или гармонический скальпель, располагается на конце инструмента 210, инструмента 202.
Корпус 216 располагается на соединительном конце 212 инструмента 202. Корпус имеет рычаг 218, расположенный внутри корпуса 216. Рычаг 218 имеет точку опоры 220, которая устанавливается с использованием штифта, проходящего через связанное отверстие 222 в рычаге. Штифт может быть прикреплен к внутренней стенке 224 корпуса. Кабель или стержень толкания/вытягивания, который выходит за длину инструмента 202, прикрепляется к рычагу 218 таким образом, что движение рычага 218 относительно точки опоры 220 приводит к линейному движению кабеля или стержня 226. По существу, кабель или стержень 226 служит в качестве средства 227 для приведения в движение инструмента 214 на конце инструмента 210 инструмента 202. Кабель или стержень 226 могут быть также прикреплены к рычагу посредством соединительного штифта. Рычаг имеет С-образную форму, где концы рычага 218 выступают через два отверстия 228, 230 в корпусе 216. Отверстия 228, 230 предпочтительно окружены О-кольцами 232, назначение которых будет описано детально здесь ниже.
Конец инструмента 210 заднего загрузочного хирургического инструмента 202 располагается в полой трубке привода инструмента 200, вставляемого сзади. Инструмент 202 может выталкиваться через привод инструмента до тех пор, пока конец инструмента 210 будет выступать за пределы кожуха 204.
О-кольца 232 помещаются на связанные отверстия 234, 236 в корпусе 238 привода инструмента 200. Корпус дополнительно имеет отверстие 240, проходящее через его центр, отверстие имеет общую ось с внутренностью полой трубки. Таким способом хирургический инструмент 202 может быть введен внутрь и через привод инструмента 200. Каждое из О-колец 232 плотно располагается в его связанном отверстии в корпусе 238 привода инструмента 200.
Корпус 238 дополнительно включает узел двигателя 242, который изображен на фиг.11А. Узел двигателя 242 прикреплен к корпусу 238 и плотно держится там на месте. Узел двигателя обычно включает двигатель 244, прикрепленный к преобразователю 246. Двигатель управляет пластиной 248, прикрепленной к его концу. Пластина 248 зацепляет концы рычага 218 таким образом, что вращательное движение двигателя приводит к движению пластины 218 относительно точки опоры 220. Это, в свою очередь, приводит к латеральному движению средства 227 для управления инструментом 214 на конце инструмента 210 инструмента 202. Двигатель движется в ответ на движения управляющей ручки. Дополнительно могут быть прикреплены датчики силовой обратной связи 248, 250 на концах пластины 248. По существу, система силовой обратной связи может быть включена для улавливания количества силы, необходимой для приведения в движение инструмента 214 на конце инструмента 210 инструмента 202. Альтернативно двигатель 244 имеет устройство силовой обратной связи 252, прикрепленное к нему, которое может использоваться подобным образом.
Одним преимуществом использования привода инструмента 200, вставляемого сзади, является то, что кожух 204 всегда остается в пациенте 12. По существу, ни инструменты, ни узел манипулятора робота 26 не должны перегруппировываться при замещении или замене инструментов. Кожух 204 сохраняет свое положение относительно пациента 12, перемещается или нет в него инструмент.
Система 10 по настоящему изобретению дополнительно может быть снабжена одной или двумя дополнительными степенями свободы на кончике инструмента. В качестве примера будут раскрыты две дополнительные степени свободы, однако необходимо понимать, что также может быть включена одна степень свободы. Для обеспечения дополнительных степеней свободы, как показано на фиг.13-16, в настоящий инструмент может быть включен шарнирный хирургический инструмент 300. Инструмент 300 может быть соединен с узлом манипулятора 26 посредством втулки и держателя, как раскрыто здесь ниже. Для того чтобы соединить кончик шарнирного инструмента 300, следует использовать привод шарнирного инструмента 500. Привод шарнирного инструмента 500 будет описан более детально здесь ниже. Управляющая часть системы должна иметь к этому две дополнительные степени свободы для подтверждения контрольных сигналов для соединения на кончике инструмента 300. На фиг.25 показана альтернативная схема управляющей части системы, которая включает две дополнительные степени свободы. Как раскрыто здесь ниже, две дополнительные степени свободы находятся на шарнирной части инструмента 300. Две дополнительные оси в управляющей части системы относятся к Jm6 и Jm7.
Посредством включения шарнирного инструмента 300 и привода шарнирного инструмента 500 и дополнительных степеней свободы в управляющей части системы можно гораздо проще выполнять сложные движения.
Как показано на фиг.13-16, шарнирный инструмент 300 обычно включает удлиненный стержень 302, кожух 304 и инструмент 306. Инструмент может быть захватным устройством, режущим лезвием, крючком, устройством для наложения швов или каким-либо другим хорошо известным инструментом, используемым в минимально инвазивных хирургических операциях. Фиг.27-30 представляют различные инструменты, которые можно устанавливать на дистальном конце шарнирного хирургического инструмента 300.
Инструмент 300 включает шарнирную часть 301, имеющую проксимальную часть 308, поворотное соединение 310 и дистальную часть 212, каждая из которых будет описана более детально здесь ниже. Дополнительно инструмент 300 включает устройство 311 для соединения шарнирной части 301 инструмента 300 по отношению к удлиненному стержню 302. Включение шарнирной части 301 обеспечивает две дополнительные степени свободы на кончике инструмента. Также следует понимать, что несмотря на то, что шарнирная часть 301 описывается, как включающая проксимальную часть, поворотное соединение и дистальную часть, может быть обеспечено множество промежуточных частей, каждая из которых монтируется одна к другой посредством соответствующих поворотных соединений.
Расположенные между и установленные к каждой из соответствующих проксимальной части и дистальной части и любые введенные промежуточные части являются поворотными соединениями 310. Поворотное соединение 310 зацепляется с проксимальной и дистальной частями шарнирной части для обеспечения соединения на кончике инструмента. По существу, взаимодействие проксимальной части, шарнирного соединения и дистальной части служит в качестве универсального соединения.
Удлиненный стержень 302 предпочтительно является полым и сделан из нержавеющей стали или пластика или любого другого хорошо известного материала, который стерилизуется. Поскольку стержень 302 является полым, он заключает в себе и определяет внутренность 314. Удлиненный стержень 302 дополнительно имеет проксимальный конец 316 и дистальный конец 318. Дистальный конец 318 удлиненного стержня 302 не следует путать с дистальной частью 312 шарнирной части 301 инструмента 300.
Проксимальную часть 308 шарнирной части 301 можно изготавливать целиком с удлиненным стержнем 302, или она может быть соединена с ним посредством сварки, клея или некоторых других средств, хорошо известных специалистам в этой области. Предпочтительно, если проксимальная часть 308 может изготавливаться целиком с удлиненным стержнем 302 для обеспечения значительной стабильности и прочности инструмента 300. Проксимальная часть 308 шарнирной части 301 включает два пальца 320, 322, каждый из которых имеет отверстие 324, 326, проходящее через него.
Поворотное соединение 310 установлено к проксимальной части 308 посредством множества штифтов 328, каждый из которых проходит через связанное отверстие в примыкающем пальце. Поворотное соединение 310 является обычно плоским диском 330, имеющим центральное отверстие 332, проходящее через него, и четыре отверстия 334, 336, 338, 340, равномерно расположенные по периферии диска 330. Дополнительно штифты 328 прикреплены к и выходят из кромки 342. Штифты 328 находятся в отверстиях связанных пальцев для обеспечения соединения инструмента 300. Пять проводов 350, 352, 354, 356, 358 проходят внутри полого стержня. Провод 350 проходит вниз к центру и проходит через центральное отверстие 332 в поворотном соединении 310. Два 352, 354 из пяти проводов проходят вниз по полой внутренности инструмента и примыкают к поворотному соединению таким образом, что линейное натяжение одного из проводов приводит к вращательному движения шарнирной части 301. Эти два провода 352, 354 прикреплены к поворотному соединению через два отверстия, проходящие через него. Дополнительно они прикреплены к тем отверстиям, которые являются смежными со штифтами, которые проходят через пальцы проксимальной части 308 шарнирной части 301 инструмента 300. Два других провода 356, 358 проходят через два других отверстия в поворотном соединении и прикреплены к дистальному концу шарнирной части 301. Движение этих проводов приводит к движению шарнирной части 301, которая занимает ортогональное положение по отношению к движению, когда движутся два других провода 352, 354.
Для соединения инструмента как части настоящей системы и как изображено на фиг.17-24, обеспечивается шарнирный механизм 400. Шарнирный механизм 400 обычно включает привод шарнирного инструмента 500, стерильное соединительное устройство 600, преобразователь 700 и шарнирный инструмент 300.
Преобразователь прикрепляется к проксимальному концу 316 инструмента 300. Инструмент 300 может дополнительно иметь съемный инструмент 420, как показано на фиг.18-19. Съемный инструмент 420 может представлять собой любой инструмент, такой как режущий инструмент 422, который прикрепляется к удлиненному стержню или кабелю 424. На конце стержня 246 расположена плоская секция 428 с отверстием 430, проделанным насквозь. Плоская секция 428 входит в канал 432, расположенный на конце второго кабеля или стержня 434, и перемещается вниз удлиненного стержня инструмента 300. Второй кабель 434 имеет канал 432, сделанный в его конце так, что плоская секция 428 помещается в канале 432. По меньшей мере одна пружинная защелка со смещением 436 находится в отверстии 430, проходящем через плоскую секцию 428. Она связывает инструмент 420 с остальной частью инструмента 300. По существу, инструменты могут заменяться на кончике инструмента без удаления инструмента из системы 10 каждый раз, когда необходим новый инструмент.
Инструмент 300 прикрепляется к преобразователю 700 и в основном изготавливается целиком с ним. Шарнирный механизм 400 прикрепляется к узлу манипулятора робота 26 посредством втулки 85, как это раскрывается здесь выше. Втулка 85 плотно прилегает к стержню 302 инструмента 300.
Преобразователь 700 имеет проксимальный конец 702 и дистальный конец 704. Дистальный конец 704 преобразователя 700 имеет в разрезе форму, которая в основном сходна с формой в разрезе удлиненного стержня 302 инструмента 300. Кроме того, преобразователь 700 имеет полую внутренность 706. Центральный стержень 350 проходит через полую внутренность 706 преобразователя 700 и выходит на его проксимальном конце 702. Два провода 352, 354 заканчиваются внутри преобразователя на двух плечах 708, 710, которые прикреплены к первой полой трубке 712, через которую проходит центральный провод 350. Первая полая трубка 712 может быть сделана из прочного долговечного материала, такого как нержавеющая сталь, твердый пластик или им подобные.
Первая полая трубка 712 установлена к подшипнику 714 таким образом, что она может вращаться. Вращение первой полой трубки 712 приводит к линейному движению проводов 352, 354 и соединению шарнирной части 301 инструмента 300 в одной плоскости движения.
Вторая полая трубка 716 имеет пару плеч 718, 719, выходящих из нее. Два провода 356, 358 прикреплены к каждому из плеч 718, 719. Полая трубка 716 располагается внутри узла подшипника 720 таким образом, что она может вращаться. Вновь вращение второй полой трубки 716 приводит к линейному движению проводов 356, 358, которое связывает шарнирную часть 301 инструмента 300 в плоскости, ортогональной к плоскости движения, возникающего в результате вращения первой полой трубки. Необходимо понимать, что вторая полая трубка 714 радиально окружает первую полую трубку 712. Преобразователь 700 дополнительно включает быстрый размыкатель 722, включающий штифт 724, расположенный на конце пружинного рычага со смещением 726, который обеспечивает съемное прикрепление преобразователя 700 к стерильному соединительному устройству 600. Обе полые трубки 712 и 716 могут иметь пазы 750, сделанные там на их концах. Пазы служат в качестве средств 752 для взаимосвязи каждой из трубок со стерильным соединительным устройством 600, которое далее будет детально обсуждено здесь ниже.
Преобразователь 700 подвижно прикрепляется к стерильному соединительному устройству 600 посредством быстрого размыкателя 722. Поскольку привод шарнирного инструмента 500 стерилизуется не легко, имеет преимущество включать стерильное соединительное устройство 600 таким образом, чтобы инструменты можно было менять без стерилизации привода шарнирного инструмента 500. Дополнительно, соединительное устройство 600 обеспечивает средства, с помощью которых преобразователь 700 может прикрепляться к приводу инструмента 500, в то время как привод инструмента закрыт чехлом 125 так, как это изображено на фиг.26. Преобразователь 600 имеет корпус 610. Предпочтительно, если корпус и части соединительного устройства 600 сделаны из легко стерилизуемого материала, такого как нержавеющая сталь, пластики или другие хорошо известные стерилизуемые материалы. Корпус 610 имеет в основном полую внутренность 612 и открытые концы 614 и 616. Две полые трубки 618 и 620 имеют вращательное расположение внутри корпуса 610. Для приведения в действие вращения каждой из трубок 618 и 620 около каждой из трубок расположены подшипники 622 и 624. Каждая из трубок имеет пазы 626, сделанные на их концах, для приведения в действие прикрепления преобразователя 700 к соединительному устройству 600 на одном конце и для осуществления прикрепления соединительного устройства 600 к приводу шарнирного инструмента 500 на другом его конце.
Штифт 724 на преобразователе может входить в паз 628 для прикрепления преобразователя 700 к соединительному устройству 600. Дополнительно соединительное устройство 600 может включать штифт 630, прикрепленный к пружинному шарниру со смещением 632 для осуществления прикрепления соединительного устройства к приводу 500. Соединительное устройство 600 дополнительно включает центральную секцию 634, куда скользяще входит конец 351 центрального кабеля или стержня 350. Конец 351 может включать кончик с кольцевым пазом 353, расположенным вокруг него. Кончик помещается в углублении 636, образованном в центральной секции 634, и съемно фиксируется на месте, по меньшей мере, одной пружинной защелкой 638. Кончик 640, который в основном аналогичен кончику, включающему кольцевой паз 353, располагается смежно к углублению 636 и служит для прикрепления центрального кабеля 350 к приводу шарнирного инструмента 500, который будет обсуждаться более детально здесь ниже.
Центральная секция 634 предназначена для латерального скольжения находящейся глубоко внутри трубки 618. Для осуществления подобного скользящего движения можно расположить линейный подшипник около центральной секции внутри находящейся глубоко трубки. Альтернативно центральная секция 634 может быть сделана из материала подшипника, который обеспечивает гладкое скольжение находящейся глубоко внутри трубки 618.
Соединительное устройство 600 является съемно прикрепляемым к приводу шарнирного инструмента 500. Предполагается, что привод заключается в чехол 125. Привод шарнирного инструмента 500 включает в основном полый корпус 502, имеющий закрытый первый конец 504 и в основном открытый второй конец 504. Безопасно расположены внутри корпуса 502 двигатель захватного устройства 506 и пара двигателей запястных шарниров 508 и 510. Каждый из двигателей находится в электрической связи с контроллером 46. Альтернативно, двигатели могут получать сигналы от контроллера посредством системы передатчик/приемник, где такие системы хорошо известны. Применение подобной системы передатчик/приемник в настоящем изобретении является новым. Двигатель захватного устройства 506 прикрепляется к нагрузочной гайке 510, которая окружает нагрузочный винт 512. Двигатель 506 получает контрольные сигналы и поворачивается в ответ на них. Нагрузочная гайка 510 поворачивается, что приводит к латеральному движению нагрузочного винта 512. Нагрузочный винт 512 присоединяется к нагрузочному элементу 514, который можно использовать для измерения силы, необходимой для латерального движения кабеля 350, который прикрепляется посредством соединительного устройства 600 к двигателю захватного устройства 506. Это можно использовать в системе силовой обратной связи, которая может быть включена в систему 10 по настоящему изобретению. Стержень 516, имеющий канал 518, образованный на его конце, прикрепляется к нагрузочному элементу 514. По существу, стержень 516 движется линейно. Кончик 640 соединительного устройства 600 помещается в канале 518 и съемно фиксируется на месте, по меньшей мере, одной пружинной защелкой со смещением или каким-либо другим подобным механизмом соединения 520. Следовательно, если хирург с помощью управляющей ручки приводит в движение захватные устройства, двигатель захватного устройства поворачивается, тем самым латерально передвигая стержень 516, и, в свою очередь, центральный кабель 350, который соответственно открывает и закрывает захватные устройства на инструменте. Конечно, действие на инструменте будет зависеть от типа инструмента, расположенного на нем. Например, если сшивающий скобами инструмент расположен на конце хирургического инструмента 300, тогда будет иметь место сшивание скобами.
Если управляющая ручка 50 или 52 повернута относительно осей J6 или J7, тогда один из двух двигателей запястного шарнира 510, 508, соответствующий необходимому движению, поворачивается. Каждый из двигателей 508, 510 прикрепляется к соответствующей шестерне 522, 524. Каждая из шестерен 522, 524 зацепляет соответствующую шлицованную секцию 530, 532 связанной полой трубки 526, 528 для радиального поворота связанной трубки относительно ее продольной оси. Каждая из трубок 526, 528 включает пазовые концы 534, 536 для защемления пазовых концов соответствующих полых трубок соединительного устройства 600. Необходимо понимать, что каждая из полых трубок 526, 528, 618 и 620 является полностью коаксиальной. Дополнительно, между каждой из трубок 526 и 528 можно поместить подшипники для обеспечения свободного независимого вращения отдельных трубок.
Когда трубки 526, 528 вращаются, они вращают трубки в соединительном устройстве, которое вращает трубки в преобразователе. Это приводит к соединению на кончике хирургического инструмента 300. Конкретнее, это приводит к соединению шарнирной части хирургического инструмента 300. Дополнительно используемые из переднего загрузочного привода, заднего загрузочного привода инструмента или шарнирного привода инструмента хирургические инструменты можно легко менять.
По существу, режущее лезвие 800 может быть легко сменено на зажим, а зажим может быть заменен на сшиватель скобами 810. В основном, подобная система облегчает проведение минимально инвазивных операций, где операции включают стадию замены одного инструмента на другой. И поскольку система позволяет иметь соединение на кончике некоторых инструментов, соединительный механизм можно использовать для соединения подобных сшивающих скобами или режущих инструментов, которые включают шарнирную часть, как здесь описано выше.
Кроме того, инструмент может не быть шарнирным инструментом, но соединительный механизм можно использовать для управления другими функциями, такими как сшивание скобами. На фиг.27 показан сшивающий скобами инструмент 810, прикрепленный к узлу манипулятора робота посредством втулки 85 и держателя 86. Провод, который в основном используют для зажима, можно использовать для приведения в движение сшивающего скобами механизма. Эндоскопические сшиватели скобами, в основном, хорошо известны в этой области, однако ранее было известно об использовании сшивающего скобами механизма, прикрепленного к манипулятору робота, как здесь раскрывается.
Кроме того, в системе по настоящему изобретению можно использовать режущее лезвие, такое как изображено на фиг.28. Режущее лезвие 800 прикрепляется к узлу манипулятора робота посредством втулки 85 и держателя 86. Для режущего лезвия не требуется провод такой, как необходим для зажима или сшивателя скобами, однако режущий инструмент может присоединяться посредством шарнирного механизма, который раскрыт здесь выше.
Прижигатель или коагулятор могут дополнительно присоединяться к узлу манипулятора робота 26 посредством втулки 85 и держателя. Прижигатели и коагуляторы хорошо известны, и прижигающий инструмент может быть прикреплен в конце шарнирного инструмента, как раскрыто здесь выше. Используя многообразие инструментов в предопределенных последовательностях, можно выполнять различные операции. Обычно предпочтительно иметь возможность менять инструменты, поскольку это требуется для многих операций.
В то время как изобретение было описано в определенных примерах и показано на сопровождающих чертежах, следует понимать, что подобные воплощения являются единственно иллюстративными и не ограничивают широту изобретения и что это изобретение не ограничивается показанными и описанными определенными конструкциями и системами, поскольку могут иметь место различные другие модификации для обычных специалистов этой области.


Изобретение относится к области медицинской техники, а именно к роботизированным хирургическим системам. Система включает пару хирургических инструментов, которые присоединены к паре манипуляторов робота. Инструменты имеют концевые исполнительные механизмы, которыми можно манипулировать для поддержания и наложения швов на ткани. Хирург может двигать ручки для воспроизведения соответствующего движения концевых исполнительных механизмов. Движение ручек соизмеряется таким образом, что концевые исполнительные механизмы имеют соответствующее движение, которое обычно меньше, чем движение, осуществляемое руками хирурга. Масштабный коэффициент подбирается таким образом, что хирург может управлять разрешающей способностью движения концевого исполнительного механизма. Хирург может подобрать положение ручек без движения концевых исполнительных механизмов таким образом, что ручки можно передвинуть в более удобное положение. Изобретение позволяет повысить точность и скорость проведения операций, уменьшить продолжительность анестезии у пациента. 3 с. и 22 з. п. ф-лы, 30 ил.
| US 5417210 A, 23.05.1995 | |||
| US 4510574 A, 09.04.1985 | |||
| US 3280991 A, 25.10.1966 | |||
| US 5408409 А, 18.04.1995 | |||
| US 5217003 A, 08.06.1993 | |||
| МАНИПУЛЯТОР | 1993 |
|
RU2041056C1 |
| US 5236432 А, 17.08.1993 | |||
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
