ОТСЫЛКИ НА РОДСТВЕННЫЕ ЗАЯВКИ
Настоящая заявка является частичным продолжением, которое истребует приоритет заявки на патент США № 11/651807 под названием: «Хирургический инструмент с беспроводной связью между устройством управления и удаленным датчиком», поданной 10 января 2007 года; и связана со следующими одновременно находящимися на рассмотрении заявками на патент США, которые включены в настоящий документ посредством ссылки:
(1) Заявкой на патент США Сер. № 11/651715 под названием «ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ С БЕСПРОВОДНОЙ СВЯЗЬЮ МЕЖДУ УСТРОЙСТВОМ УПРАВЛЕНИЯ И ДАТЧИКОМ-РЕТРАНСЛЯТОРОМ» Дж. Джордано и соавт. (Дело патентного поверенного № 060338/END5923USNP);
(2) Заявкой на патент США Сер. № 11/651806 под названием «ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ С ЭЛЕМЕНТАМИ ДЛЯ СОЕДИНЕНИЯ УСТРОЙСТВА УПРАВЛЕНИЯ С КОНЦЕВЫМ ЗАЖИМОМ» Дж. Джордано и соавт. (Дело патентного поверенного № 060340/ END5925USNP);
(3) Заявкой на патент США Сер. № 11/651768 под названием «Предотвращение повторного использования картриджа в хирургическом инструменте» Ф. Шелтон и соавт., опубликованной 25 мая 2010 года как патент США № 7721931 (Дело патентного поверенного № 060341/ END5926USNP);
(4) Заявкой на патент США Сер. № 11/651807 под названием «ПОСЛЕСТЕРИЛИЗАЦИОННОЕ ПРОГРАММИРОВАНИЕ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ», Дж. Суэйз и соавторы (Дело патентного поверенного № 060342/END5924USNP);
(5) Заявкой на патент США Сер. № 11/651788 под названием «Блокировка и содержащий ее хирургический инструмент», Ф.Шелтон и соавторы, опубликованно 25 мая 2010 года как патент США № 7721936 (Дело патентного поверенного № 060343/ END5928USNP); и
(6) Заявкой на патент США Сер. № 11/651785 под названием «Хирургический инструмент с повышенной производительностью аккумулятора,» Ф. Шелтон и соавт. (Дело патентного поверенного № 060347/ END5931USNP).
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Эндоскопические хирургические инструменты часто более предпочтительны, чем традиционные устройства для открытой хирургии, поскольку меньший разрез имеет тенденцию сокращать время послеоперационного восстановления и снижать риск развития осложнений у пациента. Следовательно, была проведена значительная работа по разработке набора эндоскопических хирургических инструментов, которые допускают точное введение дистального рабочего инструмента в желаемое операционное поле через канюлю или троакар. Такие дистальные рабочие инструменты зацепляют ткань множеством способов для достижения диагностического или терапевтического эффекта (такие инструменты, как, например, эндокатер, зажим, рассекатель, сшивающие инструменты, клипсонакладыватель, устройство доступа, устройство для введения медикаментов/генной терапии и устройство подачи энергии для проведения ультразвуковых, РЧ- или лазерных процедур и т.д.).
Известные хирургические сшивающие аппараты содержат концевой зажим, который одновременно производит продольный разрез ткани и устанавливает на противоположных сторонах разреза линии скобок. Если инструмент предназначен для эндоскопических или лапароскопических вмешательств, концевой зажим содержит пару взаимодействующих браншей, благодаря чему он может проходить через проходное отверстие канюли. Одна из браншей удерживает картридж со скобками, содержащий, по меньшей мере, два боковых ряда скобок. Другая бранша представляет собой упорный элемент с формирующими скобку углублениями, расположенными соответственно рядам скобок в картридже. Инструмент содержит множество клиньев с возвратно-поступательным движением, которые при совершении возвратно-поступательных движений наружу проходят через отверстия в картридже со скобками и соединяются с направляющими для скобок для приведения в действие скобок при помощи упорного элемента.
Пример хирургического сшивающего аппарата, подходящего для эндоскопического применения, описан в патенте США № 5465895, в котором говорится о эндокатере, который совершает по отдельности сжимающие и режуще-сшивающие движения. При использовании данного устройства клиницист может сомкнуть бранши на ткани для ее установки в нужное положение перед сшиванием. Если клиницист определил, что бранши надлежащим образом захватили ткань, он может запустить хирургический сшивающий аппарат для одного рабочего такта, тем самым рассекая и сшивая ткань. Одновременное рассечение и сшивание тканей исключает осложнения, которые могут возникать при поочередном выполнении этих операций разными хирургическими инструментами, например, только режущими или только сшивающими.
Одним из конкретных преимуществ возможности захвата тканей перед приведением инструмента в действие является то, что благодаря этому клиницист может убедиться при помощи эндоскопа, что было найдено желаемое место для разреза, включая захват достаточного количества ткани между противолежащими браншами. В противном случае противолежащие бранши зажима могут быть сведены слишком близко, особенно на дистальных концах, неэффективно фиксируя скобы в рассеченной ткани. С другой стороны, избыточное количество зажатой ткани может приводить к заклиниванию и незавершенности процесса сшивания.
С каждым последующим поколением эндоскопические сшивающие/рассекающие инструменты усложняются, увеличивается количество функциональных возможностей. Одной из главных причин является поиск возможности снижения силы-для-запуска (СДЗ) до уровня, с которым может справиться большинство хирургов. Одним из известных решений для снижения СДЗ является использование двигателей на CO2 или электрических двигателей. Данные устройства не имеют преимуществ над традиционными устройствами с ручным управлением, но по другой причине. Хирурги обычно предпочитают работать с пропорциональным распределением силы, которая прилагается концевым зажимом при формовании скобок для обеспечения завершения цикла разрезания/сшивания, на верхней границе возможностей большинства хирургов (обычно около 66,7-133,4 ньютон (15-30 фунтов)). Они также обычно хотят сохранять контроль над установкой скобок и иметь возможность остановить ее в любой момент, если сила, прикладываемая к рукоятке устройства, кажется слишком большой, или по некоторым другим клиническим причинам.
Для удовлетворения этой потребности были разработаны, так называемые, «усилители» для эндоскопических хирургических инструментов, в которых дополнительный источник питания помогает при приведении в действие инструмента. Например, в некоторых усилителях двигатель получает дополнительное электропитание при трате энергии пользователем для нажатия спускового крючка. Такие устройства способны обеспечивать обратную связь для силы нагрузки и пользовательский контроль для уменьшения силы, которую необходимо приложить хирургу при запуске инструмента для завершения операции разрезания. Один из таких усилителей описан в заявке на патент США Сер. № 11/343573, поданной 31 января 2006 года Шелтон и соавт., под названием «Автоматический хирургический режущий и сшивающий инструмент с обратной связью для силы нагрузки», (заявление ‘573), которая включена в настоящий документ в виде ссылки.
Эти усилители зачастую включают другие компоненты, такие как датчики и контрольные системы, которые отсутствуют в чисто механических эндоскопических хирургических инструментах. Одной из проблем при использовании таких электронных устройств в хирургических инструментах является обмен энергией и/или данными с датчиками, в особенности при наличии в хирургическом инструменте поворотного шарнира.
ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
В одном из общих аспектов настоящее изобретение направлено на изобретение хирургического инструмента, такого как эндоскопический или лапароскопический инструмент. В соответствии с одним вариантом осуществления хирургический инструмент содержит концевой зажим, содержащий, по меньшей мере, один датчик-ретранслятор, который пассивно снабжается энергией. Хирургический инструмент также содержит вал, имеющий соединенный с концевым зажимом дистальный конец, и рукоятку, соединенную с проксимальным концом вала. Рукоятка содержит устройство управления (например, микроконтроллер), который взаимодействует с датчиком-ретранслятором при помощи, по меньшей мере, одной индуктивной связи. Кроме того, хирургический инструмент может содержать поворотный шарнир для вращения вала. В таком случае хирургический инструмент может содержать первый индуктивный элемент, расположенный в вале дистальнее поворотного шарнира и индуктивно связанный с устройством управления, и второй индуктивный элемент, расположенный в вале дистальнее и индуктивно связанный с, по меньшей мере, одним датчиком-ретранслятором. Первый и второй индуктивные элементы могут быть соединены проводной, или физической, связью.
Таким образом, устройство управления может взаимодействовать с ретранслятором в концевом зажиме без непосредственной проводной связи, поскольку при наличии сложных механических соединений, таких как поворотный шарнир, может быть сложно поддерживать такую проводную связь. Кроме того, поскольку расстояния между индуктивными элементами может быть фиксированными и известными, соединения могут быть оптимизированы для индуктивной передачи энергии. К тому же, расстояния могут быть относительно короткими, поскольку могут использоваться относительно слабые сигналы для минимизации взаимодействия с другими системами в области применения данного инструмента.
В другом общем аспекте настоящего изобретения электропроводный вал хирургического инструмента может служить антенной для устройства управления для беспроводной передачи сигналов к датчику-ретранслятору и от него. Например, датчик-ретранслятор может находиться или располагаться в непроводящем компоненте концевого зажима, таком как пластиковый картридж, при помощи чего достигается изоляция датчика от проводящих компонентов концевого зажима и вала. Кроме того, устройство управления в рукоятке может быть электрически соединено с валом. Таким образом, вал и/или концевой зажим могут служить антенной для устройства управления за счет передачи сигналов от устройства управления к датчику и/или получения переданных сигналов от датчиков. Такая конструкция особенно полезна в хирургических инструментах, которые содержат сложные механические соединения (такие как поворотные шарниры), что затрудняет использование прямой проводной связи между датчиком и устройством управления для передачи данных в виде сигналов.
В другом варианте осуществления вал и/или компоненты концевого зажима могут служить антенной для датчика за счет передачи сигналов к устройству управления и получения переданных сигналов от устройства управления. В соответствии с таким вариантом осуществления устройство управления электрически изолировано от вала и концевого зажима.
В другом общем аспекте настоящее изобретение направлено на создание хирургического инструмента, содержащего программируемое устройство управления, которое может быть запрограммировано при помощи программирующего устройства после пакования и стерилизации инструмента. В одном из таких вариантов осуществления программирующее устройство может программировать устройство управления беспроводным путем. Устройство управления может пассивно обеспечиваться энергией за счет беспроводных сигналов от программирующего устройства во время программирования. В другом варианте осуществления стерильный контейнер может содержать интерфейс подключения таким образом, что блок управления может соединяться с хирургическим инструментом, когда хирургический инструмент находится в стерильном контейнере.
Фигуры
Различные варианты осуществления настоящего изобретения описываются в настоящем документе посредством примеров в сочетании со следующими Фигурами, где:
Фигуры 1 и 2 являются видами в перспективе хирургического инструмента в соответствии с различными вариантами осуществления настоящего изобретения;
Фигуры 3-5 являются перспективными изображениями в разобранном виде концевого зажима и вала инструмента в соответствии с различными вариантами осуществления настоящего изобретения;
Фигура 6 является видом сбоку концевого зажима в соответствии с различными вариантами осуществления настоящего изобретения;
Фигура 7 является перспективным изображением в разобранном виде рукоятки инструмента в соответствии с различными вариантами осуществления настоящего изобретения;
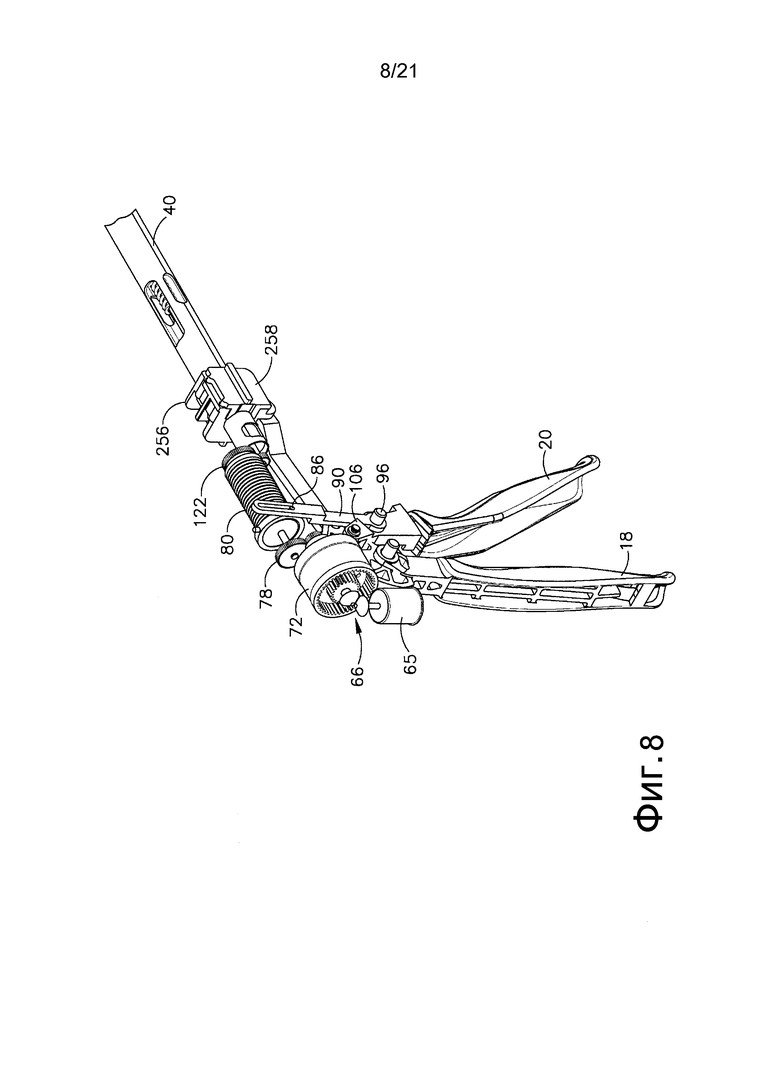
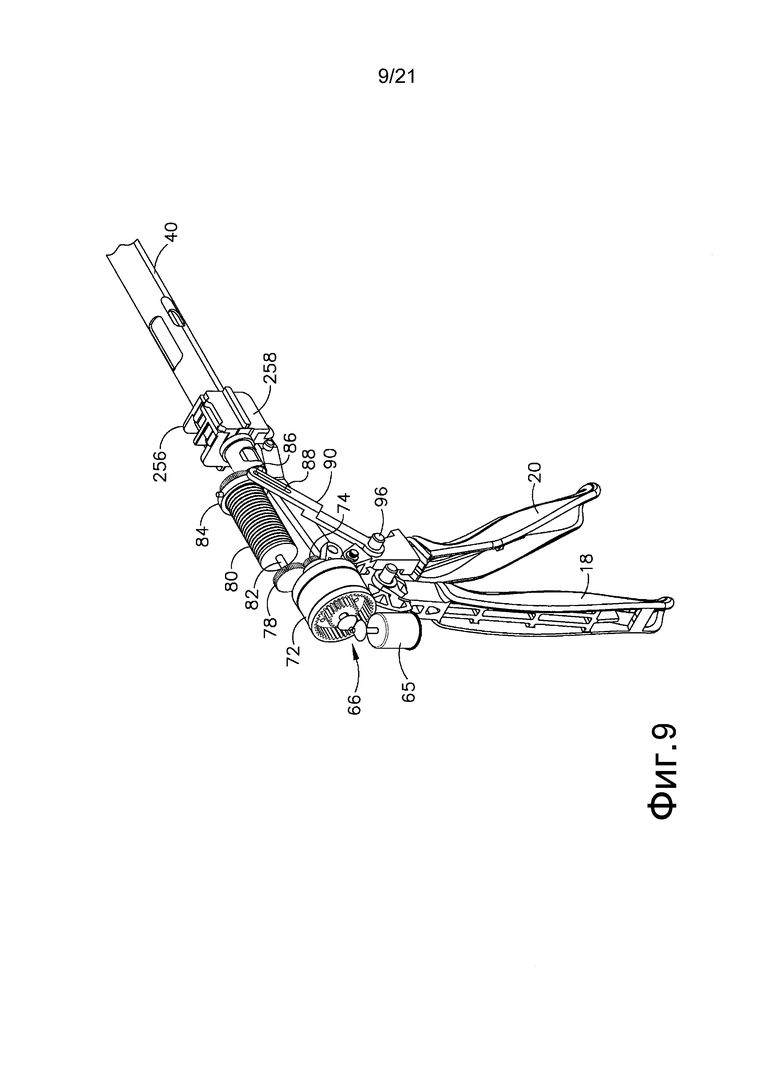
Фигуры 8 и 9 являются частичными видами в перспективе рукоятки в соответствии с различными вариантами осуществления настоящего изобретения;
Фигура 10 является видом сбоку рукоятки в соответствии с различными вариантами осуществления настоящего изобретения;
Фигуры 11, 13-14, 16 и 22 являются видами в перспективе хирургического инструмента в соответствии с различными вариантами осуществления настоящего изобретения;
Фигуры 12 и 19 являются блок-схемами устройства управления в соответствии с различными вариантами осуществления настоящего изобретения;
Фигура 15 является видом сбоку концевого зажима, содержащего датчик-ретранслятор в соответствии с различными вариантами осуществления настоящего изобретения;
Фигуры 17 и 18 изображают инструмент в стерильном контейнере в соответствии с различными вариантами осуществления настоящего изобретения;
Фигура 20 является блок-схемой удаленного программирующего устройства в соответствии с различными вариантами осуществления настоящего изобретения; и
Фигура 21 является схемой упакованного инструмента в соответствии с различными вариантами осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
Различные варианты осуществления настоящего изобретения в целом направлены на изобретение хирургического инструмента, имеющего, по меньшей мере, один удаленный датчик-ретранслятор и приспособления для передачи энергии и/или сигналов данных от устройства управления к ретранслятору. Настоящее изобретение может использоваться с любым видом хирургических инструментов, содержащих, по меньшей мере, один датчик-ретранслятор, таких как эндоскопические или лапароскопические хирургические инструменты, но оно особенно применимо для хирургических инструментов, некоторые особенности которых, такие как поворотный шарнир, препятствуют или другим образом ограничивают использование проводного соединения с датчиками. Перед описанием аспектов системы в качестве иллюстрации в первую очередь будет описан один тип хирургического инструмента, в котором используются варианты осуществления настоящего изобретения - эндоскопический сшивающий и режущий инструмент (например, эндокатер).
Фигуры 1 и 2 изображают эндоскопический хирургический инструмент 10, который содержит рукоятку 6, вал 8 и шарнирный концевой зажим 12, который соединен с возможностью вращения с валом 8 при помощи шарнирного сочленения 14. Поиск правильного размещения и ориентации концевого зажима 12 может облегчаться органами управления на рукоятке 6, включая (1) поворотную муфту 28 для вращения закрывающей трубки (более подробно описывается ниже в связи с Фигурами 4-5) относительно поворотного шарнира 29 вала 8, который обеспечивает вращение концевого зажима 12, и (2) блок управления вращением 16 для воздействия на шарнирное вращение концевого зажима 12 относительно шарнирного сочленения 14. В изображенном варианте осуществления концевой зажим 12 сконфигурирован для работы в режиме эндокатера для захвата, рассечения и сшивания ткани, хотя в других вариантах осуществления могут использоваться различные концевые зажимы, такие как концевые зажимы для других видов хирургических инструментов, таких как зажимы, рассекатели, сшивающие инструменты, клипсонакладыватели, устройства доступа, устройства для введения медикаментов/генной терапии, устройства подачи энергии для проведения ультразвуковых, РЧ- или лазерных процедур и т.д.
Рукоятка 6 инструмента 10 может иметь закрывающее спусковое устройство 18 и спусковое устройство 20, приводящее в действие концевой зажим 12. Необходимо понимать, что инструменты с концевыми зажимами, предназначенные для выполнения различных хирургических манипуляций, могут иметь разное количество и типы спусковых устройств или иных соответствующих средств управления концевым зажимом 12. Концевой зажим 12 показан отдельно от рукоятки 6 за счет предпочтительного удлиненного вала 8. В одном варианте осуществления клиницист или хирург, использующие инструмент 10, могут шарнирно соединять концевой зажим 12 с валом 8 при помощи блока управления вращением 16, что более подробно описано в ожидающей рассмотрения заявке на патент США Сер. № 11/329020, поданной 10 января 2006 года, под названием «Хирургический инструмент с шарнирным концевым зажимом», Джефри Ч. Хьюэл и соавт., которая включена в настоящий документ посредством ссылки.
В приведенном примере концевой зажим 12, помимо прочего, имеет канал для скобок 22 и шарнирно перемещаемый зажимной элемент, например, упорный элемент 24, между которыми поддерживается расстояние, обеспечивающее эффективное сшивание скобками, а также рассечение ткани, захваченной концевым зажимом 12. Рукоятка 6 включает в себя рукоятку в форме пистолета, к которой врач приводит спусковой рычаг 18 с шарнирным соединением, что приводит к закрытию или прижатию упорного элемента 24 к каналу для шовных скобок 22 концевого зажима 12, чтобы зажать ткань, расположенную между упорным элементом 24 и каналом 22. Пусковое устройство 20 расположено снаружи относительно закрывающего пускового устройства 18. Когда закрывающий спусковой крючок 18 фиксируется в положении закрытия, пусковой крючок 20 может несколько проворачиваться к пистолетной рукоятке 26, так что оператор сможет достать его одной рукой. Затем оператор может прижать пусковой крючок 20 к пистолетной рукоятке 12, осуществляя сшивание и рассечение ткани, зажатой в концевом зажиме 12. Приложение ‘573 описывает различные конфигурации для блокировки и разблокировки закрывающего спускового крючка 18. В других вариантах осуществления помимо упорного элемента 24 могут использоваться другие зажимные элементы, например, вторая бранша и т.д.
Необходимо принять во внимание, что термины «проксимальный» и «дистальный» используются в настоящем документе по отношению к хирургу, удерживающему браншу 6 инструмента 10. Так, концевой зажим 12 расположен дистально по отношению к рукоятке 6, расположенной более проксимально. Необходимо также принять во внимание, что для удобства и ясности такие пространственные термины как «вертикальный» и «горизонтальный» используются в настоящем документе по отношению к Фигурам. Однако хирургические инструменты используются во множестве ориентаций и положений, поэтому данные термины не являются абсолютными и не ограничивают настоящее изобретение.
При пользовании инструментом сначала может нажиматься закрывающее пусковое устройство 18. Когда хирурга устраивает положение концевого зажима 12, он может оттянуть закрывающий спусковой крючок 18 в фиксированное положение полного закрытия, вплотную к пистолетной рукоятке 26. После этого может быть нажат спусковой крючок 20. Когда хирург отпускает пусковой крючок 20, крючок возвращается в открытое положение (см. Фигуры 1 и 2). При нажатии кнопка разблокировки 30 на рукоятке 6 и, в данном примере, на пистолетной рукоятке 26 рукоятки может высвободить заблокированный закрывающий спусковой крючок 18.
На Фигуре 3 представлен разобранный вид концевого зажима 12 в соответствии с различными вариантами осуществления. Как показано на фигуре, концевой зажим 12, помимо ранее указанного желоба 22 и упорного элемента 24, может включать режущий инструмент 32, салазки 33, съемный картридж со скобками 34, установленный в желобе 22, и винтовой вал 36. Режущий инструмент 32 может, например, являться скальпелем. Упорный элемент 24 может открываться и закрываться на шарнире 25, соединенном с проксимальным концом канала 22. Упорный элемент 24 также на проксимальном конце может иметь петлю 27, вставленную в часть механизма закрытия (описан ниже) для открывания и закрывания упорного элемента 24. Когда закрывающий спусковой крючок 18 приводится в действие, то есть отводится пользователем инструмента 10, упорный элемент 24 может поворачиваться шарниром 25 в фиксированное, или закрытое положение. Если фиксация концевого зажима 12 является удовлетворительной, оператор может привести в действие пусковое устройство 20, при этом, как более подробно описано ниже, скальпель 32 и салазки 33 перемещаются вдоль желоба 22, рассекая ткани, зафиксированные концевым зажимом 12. В результате движения салазок 33 вдоль канала 22 скобки из кассеты 34 прошивают рассеченные ткани, упираясь в прижатый упорный элемент 24, который формирует их, фиксируя ткани. Более подробная информация о таких двухтактных режущих и сшивающих инструментах представлена в патенте США № 6978921 под названием «Хирургический сшивающий инструмент с электронно-лучевым механизмом резания/сшивания», который включен в настоящий документ посредством ссылки. Салазки 33 могут являться частью картриджа 34, при этом, когда скальпель 32 втягивается после рассечения ткани, салазки 33 не втягиваются. Желоб 22 и упорный элемент 24 могут изготавливаться из электропроводного материала (такого как металл), благодаря чему они могут служить частью антенны, которая взаимодействует с датчиками в концевом зажиме, что подробно описывается ниже. Картридж 34 может быть изготовлен из непроводящего материала (такого как пластик), а датчик может быть соединен или расположен в картридже 34, что подробно описывается ниже.
Необходимо отметить, что, несмотря на то, что в описанных в настоящем документе вариантах осуществления инструмента 10 используется концевой зажим 12, сшивающий скобками рассеченную ткань, в других вариантах осуществления могут использоваться другие способы стягивания или сшивания рассеченной ткани. Например, могут также применяться концевые зажимы, использующие для стягивания рассеченной ткани энергию радиоволн или клеящие вещества. В патенте США № 5709680 под названием «Электрохирургическое гемостатическое устройство» Йетс и соавторы, и патенте США № 5688270 под названием «Электрохирургическое гемостатическое устройство с электродами с выемкой и/или изогнутыми электродами» Йетс и соавторы, которые во всей своей полноте включены в настоящий документ посредством ссылки, описываются режущие инструменты, который использует радиочастоты для герметизации рассеченных тканей. В заявке на патент США Сер. № 11/267811 Морган и соавторы и заявке на патент США Сер. № 11/267363 Шелтон и соавторы, которые также включены в настоящий документ посредством ссылки, описываются режущие инструменты, в которых для сшивания рассеченных тканей используются клеющие вещества. В соответствии с изложенным выше, несмотря на то, что приведенное в настоящем документе описание относится к манипуляциям по рассечению/сшиванию и аналогичным операциям, необходимо понимать, что данный вариант осуществления является примером и не ограничивает настоящее изобретение. Могут также использоваться другие техники сшивания тканей.
На Фигурах 4 и 5 представлено перспективное изображение в разобранном виде, а на Фигуре 6 представлен вид сбоку концевого зажима 12 и вала 8 в соответствии с различными вариантами осуществления изобретения. Как показано в проиллюстрированном варианте осуществления, вал 8 может включать в себя проксимальную закрывающую трубку 40 и дистальную закрывающую трубку 42, связанные шарнирным звеном 44. Дистальная закрывающая трубка 42 содержит отверстие 45, в которое вставлена петля 27 упорного элемента 24 для открытия и закрытия упорного элемента 24. Непосредственно внутри закрывающих трубок 40 и 42 может быть расположена сердцевинная трубка 46. Непосредственно внутри сердцевинной трубки 46 может быть расположен основной вращательный (или проксимальный) приводной вал 48, который соединяется со вспомогательным (или дистальным) приводным валом 50 с помощью комплекта конических зубчатых колес 52. Вспомогательный приводной вал 50 соединен с приводным механизмом 54, который приводит в действие проксимальный приводной механизм 56 винтового вала 36. Вертикальная коническая шестерня 52b может находиться и поворачиваться в отверстии 57 на дистальном конце проксимальной сердцевинной трубки 46. В дистальную сердцевинную трубку 58 могут быть вставлены вспомогательный приводной вал 50 и приводные механизмы 54 и 56. В настоящем документе основной приводной вал 48, вспомогательный приводной вал 50 и шарнирное сочленение в сборе (например, комплект конических зубчатых колес 52a-c) иногда собирательно называются «основным приводным валом в сборе». Закрывающие трубки 40, 42 могут быть изготовлены из электропроводного материала (такого как металл), благодаря чему они могут служить частью антенны, что подробно описывается ниже. Компоненты основного приводного вала в сборе (например, приводные валы 48, 50) могут быть изготовлены из непроводящего материала (такого как пластик).
Приводной винт 36 посажен в подшипник 38, расположенный на дистальном конце желоба для скобок 22, что позволяет приводному винту 36 свободно вращаться относительно желоба 22. Винтовой вал 36 может стыковаться с резьбовым отверстием (не показано) скальпеля 32 таким образом, что при вращении вала 36 скальпель 32 перемещается дистально или проксимально (в зависимости от направления вращения) в желобе для скобок 22. Соответственно, когда основной приводной вал 48 начинает вращаться из-за приведения в в действие спускового крючка 20 (что более подробно описывается ниже), комплект конических зубчатых колес 52a-c вызывает вращение вспомогательного приводного вала 50, который, в свою очередь, в связи со сцеплением с приводным механизмом 54, 56 вызывает вращение винтового вала 36, который вызывает продольное перемещение скальпеля 32 по желобу 22 для рассечения любой ткани, которая зажата в концевом зажиме. Салазки 33 могут быть выполнены, например, из пластика и могут иметь наклонную дистальную поверхность. По мере движения салазок 33 через канал 22 поверхность с уклоном вперед может подталкивать или приводить в движение скобки в кассете со скобками 34 через захваченную зажимом ткань с упором об упорный элемент 24. Упорный элемент 24 сгибает скобы, скрепляя таким образом рассеченные ткани. Когда скальпель 32 втянут, скальпель 32 и салазки 33 могут разъединяться, при этом салазки 33 остаются на дистальном конце желоба 22.
В соответствии с различными вариантами осуществления, как показано на Фигурах 7-10, хирургический инструмент может содержать батарею 64 в рукоятке 6. Изображенный вариант осуществления обеспечивает обратную связь с пользователем относительно установки и силы нагрузки на режущий инструмент в концевом зажиме 12. Кроме того, этот вариант осуществления может использовать энергию, которая была приложена пользователем для втягивания спускового крючка 18, для питания инструмента 10 (в так называемом режиме «усилителя»). Как показано в проиллюстрированном варианте осуществления, рукоятка 6 включает детали внешней нижней стороны 59, 60 и детали внешней верхней стороны 61, 62, которые вплотную прилегают друг к другу, формируя внешнюю часть рукоятки 6. Детали рукоятки 59-62 могут быть изготовлены из непроводящего материала, такого как пластик. Батарея 64 может быть предусмотрена в части пистолетной рукоятки 26 рукоятки 6. Батарея 64 питает двигатель 65, расположенный в верхней части пистолетной рукоятки 26 рукоятки 6. Батарея 64 может быть сконструирована в соответствии с любой подходящей конструкцией или химическим процессом, включающим, например, литий-ионные химические соединения, такие как LiCoO2 или LiNiO2, никель-металлогидридные соединения и т.д. В соответствии с различными вариантами осуществления двигатель 65 может быть приводным щеточным двигателем постоянного тока с максимальной скоростью вращения около 5000-100000 оборотов в минуту. Двигатель 64 может перемещать на 90° блок конических зубчатых колес 66, состоящий из первого конического зубчатого колеса 68 и второго конического зубчатого колеса 70. Блок конических зубчатых колес 66 может приводить в действие блок планетарных шестерен 72. Блок планетарных шестерен 72 может включать ведущую шестерню 74, соединенную с приводным валом 76. Ведущая шестерня 74 может приводить в действие сопряженное кольцевое зубчатое колесо 78, которое через приводной вал 82 приводит в действие барабан с винтовым зубчатым колесом 80. Кольцо 84 может быть навинчено на барабан с винтовым зубчатым колесом 80. Таким образом, при вращении двигателя 65 кольцо 84 двигается вдоль барабана с винтовым зубчатым колесом 80 с помощью установленного блока конических зубчатых колес 66, блока планетарных шестерней 72 и кольцевого зубчатого колеса 78.
Рукоятка 6 может также включать датчик пуска двигателя 110 в сочетании со спусковым механизмом 20, чтобы оператор мог видеть, приведен ли в действие спусковой механизм 20 (или он «прижат») по отношению к пистолетной части 26 рукоятки 6, чтобы начать операцию рассечения/сшивания концевым зажимом 12. Датчик 110 может представлять собой пропорциональный датчик, например, реостат или резистор переменного сопротивления. Когда спусковое устройство 20 находится в прижатом состоянии, датчик 110 определяет движение и направляет электрический сигнал, указывающий на необходимость подачи электрического напряжения (или питания) к двигателю 65. Если датчик 110 является резистором переменного сопротивления или аналогичным устройством, вращение двигателя 65 может быть, как правило, пропорционально величине смещения спускового устройства 20. Таким образом, когда оператор слегка прижимает или закрывает спусковое устройство 20, двигатель 65 вращается сравнительно медленно. Когда пусковое устройство 20 полностью прижато (или находится в полностью закрытом положении), вращение двигателя 65 максимально. То есть, чем сильнее пользователь прижимает пусковое устройство 20, тем большее напряжение подается на двигатель 65, обеспечивая большую скорость вращения. В другом варианте осуществления, например, устройство управления (подробно описывается ниже) может передавать двигателю 65 выходной широтномодулированный сигнал на основе входного сигнала от датчика 110 для управления двигателем 65.
Рукоятка 6 может включать срединную часть рукоятки 104, примыкающую к верхней части спускового устройства 20. Рукоятка 6 также может содержать смещающую пружину 112, расположенную между опорами на срединной части рукоятки 104 и спусковом устройстве 20. Смещающая пружина 112 может смещать спусковое устройство 20 в полностью открытое положение. Таким образом, когда оператор разблокирует спусковое устройство 20, смещающая пружина 112 переводит спусковое устройство 20 в открытое положение, тем самым предупреждая срабатывание датчика 110, что приводит к остановке двигателя 65. Кроме того, благодаря наличию смещающей пружины 112, каждый раз, когда пользователь закрывает спусковое устройство 20, он чувствует сопротивление, что позволяет контролировать скорость вращения двигателя 65. Также оператор может прекратить воздействие на спусковое устройство 20 и тем самым прекратить воздействие на датчик 100 и остановить двигатель 65. Таким образом, пользователь может остановить работу концевого зажима 12, что позволяет обеспечить возможность управления оператором операции по рассечению/сшиванию.
Дистальный конец барабана с винтовым зубчатым колесом 80 включает дистальный приводной вал 120, который приводит в действие кольцевое зубчатое колесо 122, сопрягающееся с ведущей шестерней 124. Ведущая шестерня 124 соединяется с основным приводным валом 48 блока основного приводного вала. Таким образом, вращение двигателя 65 вызывает вращение группы основного приводного вала, что приводит в действие концевой зажим 12, как описано выше.
Кольцо 84, навинченное на барабан с винтовым зубчатым колесом 80, может включать опору 86, которая установлена в прорезь 88 кулисы 90. Кулиса 90 содержит отверстие 92 на противоположном конце 94 для удержания шарнирного штифта 96, который закреплен между деталями внешней нижней стороны рукоятки 59, 60. Шарнирный штифт 96 также проходит через отверстие 100 в спусковом устройстве 20 и отверстие 102 в срединной части рукоятки 104.
Кроме того, рукоятка 6 может включать датчик обратного действия (или датчик завершения хода) 130 и датчик остановки двигателя (или начала хода) 142. В различных вариантах осуществления датчик обратного действия 130 может являться концевым переключателем, расположенным на дистальном конце барабана с винтовым зубчатым колесом 80, при этом кольцо 84, навинченное на барабан с винтовым зубчатым колесом 80, контактирует с датчиком обратного действия 130 и включает его, когда кольцо 84 достигает дистального конца барабана с винтовым зубчатым колесом 80. При активации датчик обратного действия 130 посылает сигнал устройству управления, которое посылает сигнал двигателю 65 для изменения направления вращения, тем самым приводя к втягиванию скальпеля 32 концевого зажима 12 после операции рассечения.
Датчик останова двигателя 142 может являться, например, нормально замкнутым концевым выключателем. В различных вариантах осуществления он может располагаться на проксимальном конце барабана с винтовым зубчатым колесом 80, при этом кольцо 84 переключает выключатель 142, когда кольцо 84 достигает проксимального конца барабана с винтовым зубчатым колесом 80.
Во время операции, когда хирург, использующий инструмент 10, тянет назад спусковой крючок 20, датчик 110 определяет приведение в действие спускового крючка 20 и посылает сигнал устройству управления, которое посылает сигнал двигателю 65 для вращения вперед двигателя 65, например, со скоростью, которая пропорциональна силе, с которой хирург тянет назад спусковой крючок 20. Вращение двигателя вправо 65, в свою очередь, вызывает вращение кольцевого зубчатого колеса 78 на дистальном конце блока планетарных шестерней 72, тем самым активируя вращение барабана с винтовым зубчатым колесом 80 и продвижение в дистальном направлении кольца 84, навинченного на барабан с винтовым зубчатым колесом 80, вдоль барабана с винтовым зубчатым колесом 80. Вращение барабана с винтовым зубчатым колесом 80 также приводит в действие блок основного приводного вала, как описано выше, что, в свою очередь, приводит в рабочее положение скальпель 32 на концевом зажиме 12, то есть скальпель 32 и салазки 33 проходят вдоль канала 22, при этом рассекается ткань, захваченная концевым зажимом 12. Кроме того, в вариантах осуществления изобретения, в которых используется концевой зажим для наложения скобок, концевой зажим 12 используется для скрепления тканей скобками.
Во время операции разрезания/сшивания полным концевым зажимом 12 кольцо 84 на барабане с винтовым зубчатым колесом 80 может оставаться у дистального конца барабана с винтовым зубчатым колесом 80, что вызывает срабатывание датчика обратного действия 130, который посылает сигнал устройству управления, которое посылает сигнал двигателю 65 для изменения направления вращения двигателя 65. Это, в свою очередь, вызывает втягивание скальпеля 32 и вынуждает кольцо 84 на барабане с винтовым зубчатым колесом 80 двигаться в обратном направлении к проксимальному кольцу барабана с винтовым зубчатым колесом 80.
Срединная часть рукоятки 104 включает тыльное плечо 106, которое зацепляется за кулису 90, что наилучшим образом показано на Фигурах 8 и 9. Срединная часть рукоятки 104 также имеет ограничитель рабочего хода 107, сцепленный со спусковым устройством 20. Движение кулисы 90 управляется вращением двигателя 65, как описано выше. Когда кулиса 90 вращается против часовой стрелки и кольцо 84 перемещается с проксимального конца спирального зубчатого колеса 80 к дистальному концу, срединная часть рукоятки 104 может свободно вращаться против часовой стрелки. Таким образом, когда пользователь прижимает спусковой механизм 20, спусковой механизм 20 зацепляется с упором 107 поступательного движения в средней части рукоятки 104, заставляя среднюю часть рукоятки 104 вращаться против часовой стрелки. Однако за счет зацепления заднего плеча 106 с кулисой 90 средняя часть рукоятки 104 способна вращаться против часовой стрелки лишь настолько, насколько позволяет кулиса 90. Таким образом, если двигатель 65 остановится по какой-либо причине, кулиса 90 прекратит вращаться и пользователь не сможет прижать спусковой механизм 20 дальше, так как средняя часть рукоятки 104 не сможет свободно вращаться против часовой стрелки из-за кулисы 90.
Компоненты примера системы закрытия (или фиксации) упорного элемента 24 концевого зажима 12 путем притягивания закрывающего пускового устройства 18 также показаны на Фигурах 7-10. В показанном на иллюстрации варианте осуществления изобретения система закрывания включает хомутик 250, соединенный с закрывающим спусковым устройство 18 штырем 251, который вставляется через совмещенные отверстия в спусковом устройстве 18 и хомутике 250. Шарнирный штифт 252, вокруг которого поворачивается закрывающее спусковое устройство 18, проходит через другое отверстие в закрывающем спусковом устройстве 18, которое смещено относительно места, причем штифт 251 проходит через закрывающее спусковое устройство 18. Таким образом, втягивание зажимающего спускового устройства 18 заставляет верхнюю часть закрывающего спускового устройства 18, к которому присоединен хомутик 250 с помощью штыря 251, вращаться против часовой стрелки. Дистальный конец вилки сцепления 250 соединен с помощью штифта 254 с первым закрывающим кронштейном 256. Первый закрывающий кронштейн 256 соединен со вторым закрывающим кронштейном 258. Вместе закрывающие кронштейны 256 и 258 определяют отверстие, в которое вставлен и удерживается проксимальный конец проксимальной закрывающей трубки 40 (см. Фигура 4), при этом продольное движение закрывающих кронштейнов 256 и 258 вызывает продольное перемещение проксимальной закрывающей трубки 40. Инструмент 10 также включает закрывающий стержень 260, установленный внутри проксимальной закрывающей трубки 40. Закрывающий стержень 260 может включать окно 261, в которое вставляется опора 263 на одной из деталей внешних сторон рукоятки, такой как деталь внешней нижней стороны 59 в приведенном варианте осуществления, жестко связывая закрывающий стержень 260 с рукояткой 6. Таким образом, проксимальная закрывающая трубка 40 способна перемещаться продольно по отношению к закрывающему стержню 260. Закрывающий стержень 260 может также включать дистальный буртик 267, который прилегает к полости 269 в проксимальной сердцевинной трубке 46 и удерживается заглушкой 271 (см. Фигура 4).
Во время работы, когда хомутик 250 вращается из-за втягивания спускового устройства 18, закрывающие кронштейны 256, 258 вызывают дистальное перемещение проксимальной закрывающей трубки 40 (т.е. от конца рукоятки инструмента 10), что вызывает дистальное перемещение дистальной закрывающей трубки 42, которое приводит к повороту упорного элемента 24 вокруг шарнира 25 в сомкнутое, или закрытое, положение. Когда закрывающее пусковое устройство 18 разблокируется из заблокированного положения, проксимальная закрывающая трубка 40 скользит проксимально, что вызывает проксимальное скольжение дистальной закрывающей трубки 42, которое, в силу нахождения петли 27 в окне 45 дистальной закрывающей трубки 42, приводит к повороту упорного элемента 24 вокруг шарнира 25 в открытое, или несомкнутое, положение. Таким образом, притягивая и блокируя закрывающее спусковое устройство 18, оператор может зажимать ткань между упорным элементом 24 и желобом 22, а также освобождать ее после рассечения/сшивания, вернув закрывающее пусковое устройство 18 из закрытого положения.
Устройство управления (более подробно описано ниже) может получать выходные сигналы от датчиков окончания хода и начала хода 130, 142, а также датчика запуска двигателя 110, и может управлять двигателем 65 при помощи исходящих сигналов. Например, когда хирург изначально снова пусковое устройство 20 после блокировки закрывающего пускового устройства 18, приводится в действие датчик запуска двигателя 110. Если картридж со скобками 34 находится в концевом зажиме 12, датчик захвата картриджа (не показан) может быть закрыт, в этом случае устройство управления может посылать выходной контрольный сигнал двигателю 65 для вращения двигателя 65 вперед. Когда концевой зажим 12 завершает рабочий ход, может быть приведен в действие датчик обратного действия 130. Устройство управления может получать этот выходной сигнал от датчика обратного действия 130 и вызывать изменение направление вращения двигателя 65. При полном втягивании скальпеля 32 приводится в действие переключатель датчика останова двигателя 142, который вызывает остановку двигателя 65 при помощи устройства управления.
В других вариантах осуществления вместо пропорционального датчика 110 может использоваться двухпозиционный датчик. В таких вариантах осуществления скорость вращения двигателя 65 может не быть пропорциональной силе, приложенной оператором. Как правило, двигатель 65 может вращаться в целом с постоянной скоростью. Тем не менее, оператор получает обратную связь относительно усилия, так как пусковое устройство 20 включено в цепь зубчатых передач привода.
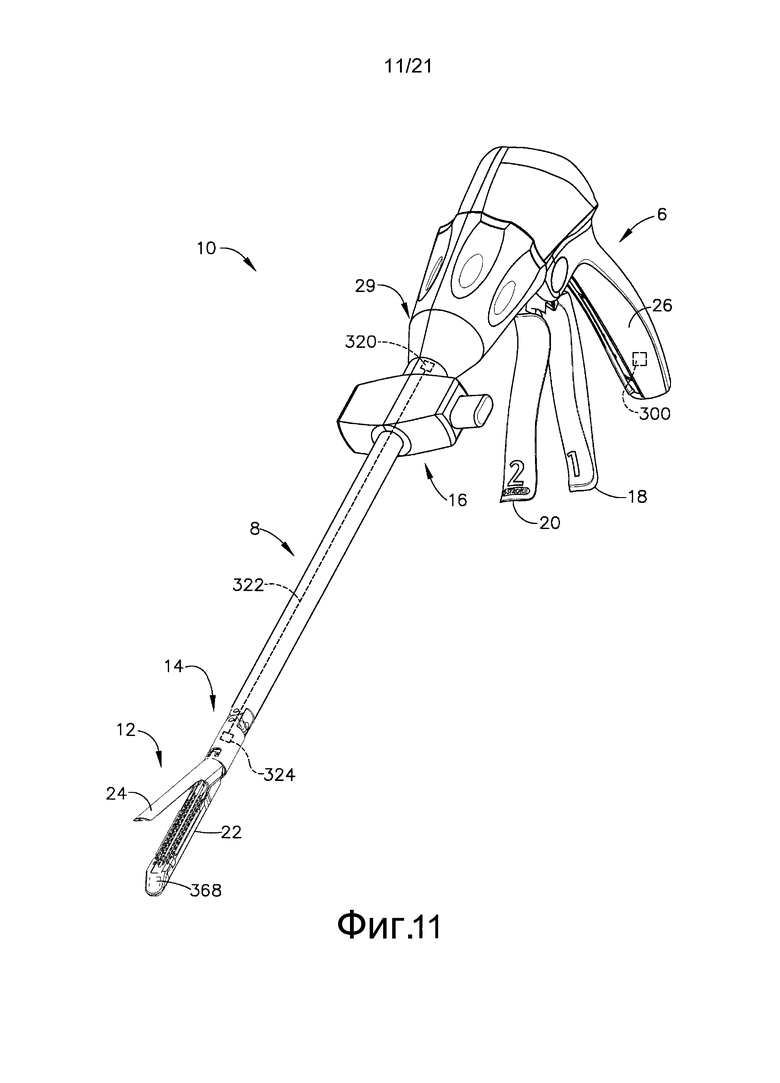
Инструмент 10 может содержать множество датчиков-ретрансляторов в концевом зажиме 12 для определения различных состояний, связанных с концевым зажимом 12, такие датчики-ретрансляторы могут применяться для определения состояния картриджа со скобками 34 (или другого вида картриджа, в зависимости от вида хирургического инструмента), продвижения сшивающего аппарата во время закрывания и приведения в действие и т.д. Датчики-ретрансляторы могут пассивно получать энергию от индуктивных сигналов, что более подробно описывается ниже, хотя в других вариантах осуществления ретрансляторы могут получать энергию от удаленного источника питания, такого как, например, батарея в концевом зажиме 12. Датчики-ретрансляторы могут включать, например, магниторезистивные, оптические, электромеханические, РЧИД и микроскопические электромеханические датчики, а также датчики движения и давления. Эти датчики-ретрансляторы могут взаимодействовать с устройством управления 300, которое может находиться, например, в рукоятке 6 инструмента 10, как показано на Фигуре 11.
Как показано на Фигуре 12, в соответствии с различными вариантами осуществления устройство управления 300 может содержать процессор 306 и один или более блок памяти 308. При выполнении набора команд, хранящихся в блоке памяти 308, процессор 306 может управлять различными компонентами инструмента 10, такими как двигатель 65 или пользовательский дисплей (не показан), на основе входных сигналов, получаемых от различных датчиков-ретрансляторов концевого зажима и других датчиков (таких как, например, датчик запуска двигателя 110, датчик окончания хода 130 и датчик начала хода 142). Устройство управления 300 может получать питание от батареи 64 во время хирургического применения инструмента 10. Устройство управления 300 может содержать индуктивный элемент 302 (например, катушку или антенну) для приема беспроводных сигналов от датчиков-ретрансляторов, что более подробно описывается ниже. Входные сигналы, получаемые при помощи индуктивного элемента 302, действующего как приемная антенна, могут быть демодулированы демодулятором 310 и дешифрованы декодером 312. Входные сигналы могут содержать данные от датчиков-ретрансляторов в концевом зажиме 12, которые могут использоваться процессором 306 для управления различными аспектами инструмента 10.
Для передачи сигналов датчикам-ретрансляторам устройство управления 300 может содержать кодер 316 для шифрования сигналов и модулятор 318 для модулирования сигналов в соответствии со схемой модуляции. Индуктивный элемент 302 может действовать как передающая антенна. Устройство управления 300 может взаимодействовать с датчиками-ретрансляторами при помощи любого подходящего протокола беспроводной связи и любой подходящей частоты (например, промышленного, научного и медицинского диапазона). Кроме того, устройство управления 300 может передавать сигналы в диапазонах частот, которые отличаются от диапазонов частот сигналов, полученных от датчиков-ретрансляторов. Кроме того, хотя на Фигуре 12 показана только одна антенна (индуктивный элемент 302), в других вариантах осуществления устройство управления 300 может иметь отдельные принимающие и передающие антенны.
В соответствии с различными вариантами осуществления, устройство управления 300 может содержать микроконтроллер, микропроцессор, программируемую пользователем вентильную матрицу (ППВМ), один или более вид других интегральных схем (например, радиоприемников и ШИМ-контроллеров), и/или импульсные пассивные элементы. Устройства управления могут также иметь вид, например, однокристальной системы (SoC) или схемы из нескольких кристаллов, помещенных в единый корпус (SIP).
Как показано на Фигуре 11, устройство управления 300 может находиться в рукоятке 6 инструмента 10, и один или более датчик-ретранслятор 368 инструмента 10 может располагаться в концевом зажиме 12. Для передачи энергии и/или данных к датчикам-ретрансляторам 368 в концевом зажиме 12 или от них индуктивный элемент 302 устройства управления 300 может быть индуктивно связан со вспомогательным индуктивным элементом (например, катушкой) 320, расположенным в вале 8 дистальнее от поворотного шарнира 29. Предпочтительно, чтобы вспомогательный индуктивный элемент 320 был электрически изолирован от проводящего вала 8.
Вспомогательный индуктивный элемент 320 может быть соединен электропроводным изолированным проводом 322 с дистальным индуктивным элементом (например, катушкой) 324, расположенным возле концевого зажима 12, и предпочтительно находиться дистальнее шарнирного сочленения 14. Провод 322 может быть изготовлен из электропроводного полимера и/или металла (например, меди) и иметь значительную гибкость, благодаря чему он может проходить через шарнирное сочленение 14 и не повреждаться при перекосе валов, соединяемых шарниром. Дистальный индуктивный элемент 324 может быть индуктивно связан с датчиком-ретранслятором 368, который находится, например, в картридже 34 концевого зажима 12. Ретранслятор 368, как более подробно описывается ниже, может содержать антенну (или катушку) для индуктивной связи с дистальной катушкой 324, датчик и встроенную электронику для приема и передачи беспроводных сигналов.
Ретранслятор 368 может использовать часть энергии индуктивного сигнала, полученного от дистального индуктивного элемента 326, для пассивного снабжения энергией ретранслятора 368. Как только ретранслятор 368 получит достаточное количество энергии от индуктивных сигналов, он может принимать и передавать данные устройству управления 300 в рукоятке 6 при помощи (i) индуктивной связи между ретранслятором 368 и дистальным индуктивным элементом 324, (ii) провода 322 и (iii) индуктивной связи между вспомогательным индуктивным элементом 320 и устройством управления 300. Таким образом, устройство управления 300 может взаимодействовать с ретранслятором 368 в концевом зажиме 12 без непосредственной проводной связи, проходящей через сложные механические сочленения, такие как поворотный шарнир 29, и/или без непосредственной проводной связи вала 8 с концевым зажимом 12, которая должна проходить через участки, где поддержание такой проводной связи затруднительно. Кроме того, из-за постоянства и известности расстояния между индуктивными элементами (например, зазора между (i) ретранслятором 368 и дистальным индуктивным элементом 324, а также (ii) вспомогательным индуктивным элементом 320 и устройством управления 300) соединения могут быть оптимизированы для индуктивного переноса энергии. Кроме того, расстояния могут быть относительно короткими, благодаря чему могут использоваться сигналы относительно малой мощности, что минимизирует их взаимодействие с другими системами в рабочей среде инструмента 10.
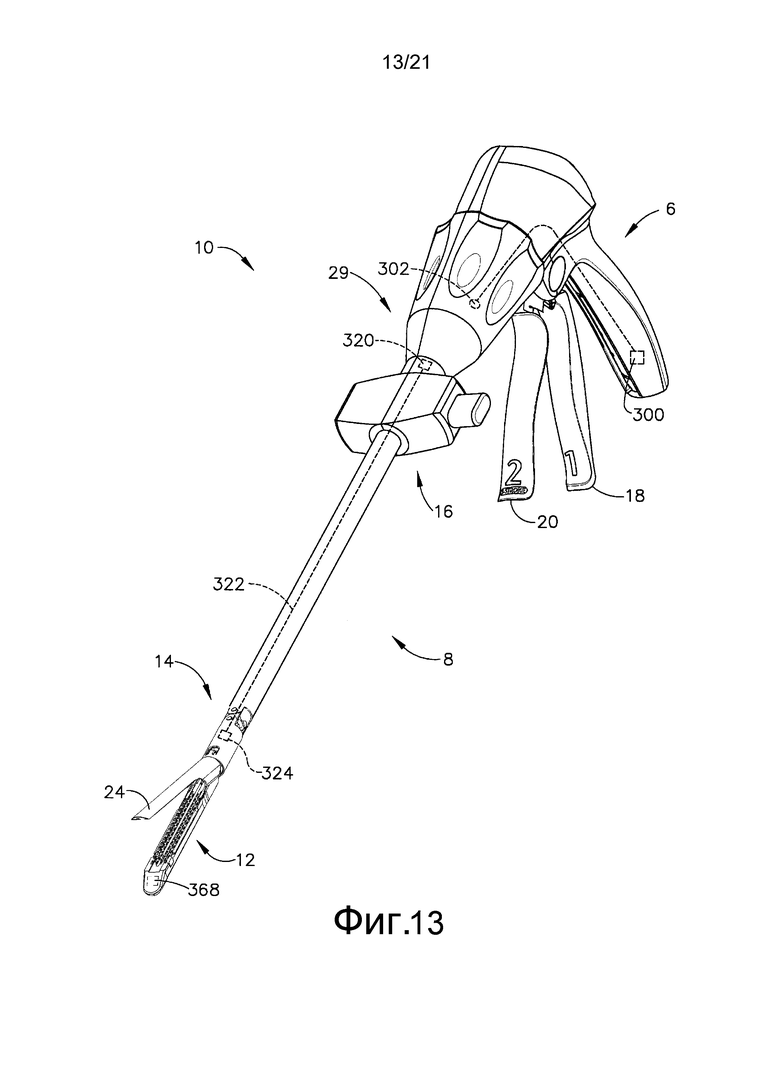
В одном варианте осуществления с Фигуры 12 индуктивный элемент 302 устройства управления 300 расположен относительно близко к устройству управления 300. В соответствии с другими вариантами осуществления, как показано на Фигуре 13, индуктивный элемент 302 устройства управления 300 может быть расположен ближе к поворотному шарниру 29, благодаря чему он находится ближе к вспомогательному индуктивному элементу 320, что уменьшает протяженность индуктивной связи в таком варианте осуществления. С другой стороны, устройство управления 300 (и, следовательно, индуктивный элемент 302) может располагаться ближе к вспомогательному индуктивному элементу 320 для уменьшения зазора.
В других вариантах осуществления может использоваться более или менее двух индуктивных связей. Например, в некоторых вариантах осуществления хирургический инструмент 10 может использовать одну индуктивную связь между устройством управления 300 в рукоятке 6 и ретранслятором 368 в концевом зажиме 12, что устраняет потребность в индуктивных элементах 320, 324 и проводе 322. Конечно, в таких вариантах осуществления может понадобиться более сильный сигнал в связи с большим расстоянием между устройством управления 300 в рукоятке 6 и ретранслятором 368 в концевом зажиме 12. Кроме того, может использоваться более двух индуктивных связей. Например, если хирургический инструмент 10 содержит множество сложных механических соединений, из-за которых сложно установить прямую проводную связь, индуктивные связи могут использоваться для охвата каждого такого соединения. Например, индуктивные соединители могут использоваться на обеих сторонах поворотного шарнира 29 и обеих сторонах шарнирного сочленения 14, причем индуктивный элемент 321 на дистальной стороне поворотного шарнира 29 соединен при помощи провода 322 с индуктивным элементом 324 на проксимальной стороне шарнирного сочленения, а провод 323 соединяет индуктивные элементы 325, 326 на дистальной стороне шарнирного сочленения 14, как показано на Фигуре 14. В данном варианте осуществления индуктивный элемент 326 может взаимодействовать с датчиком-ретранслятором 368.
Кроме того, ретранслятор 368 может содержать множество различных датчиков. Например, он может содержать группу датчиков. Более того, концевой зажим 12 может содержать множество датчиков-ретрансляторов 368 для взаимодействия с дистальным индуктивным элементом 324 (и, соответственно, с устройством управления 300). К тому же, индуктивные элементы 320, 324 могут или не могут содержать ферритовые сердечники. Как упоминалось ранее, предпочтительно, чтобы они также были изолированы от электропроводного наружного вала (или каркаса) инструмента 10 (например, закрывающих трубок 40, 42), кроме того, также предпочтительно, чтобы провод 322 был изолирован от наружного вала 8.
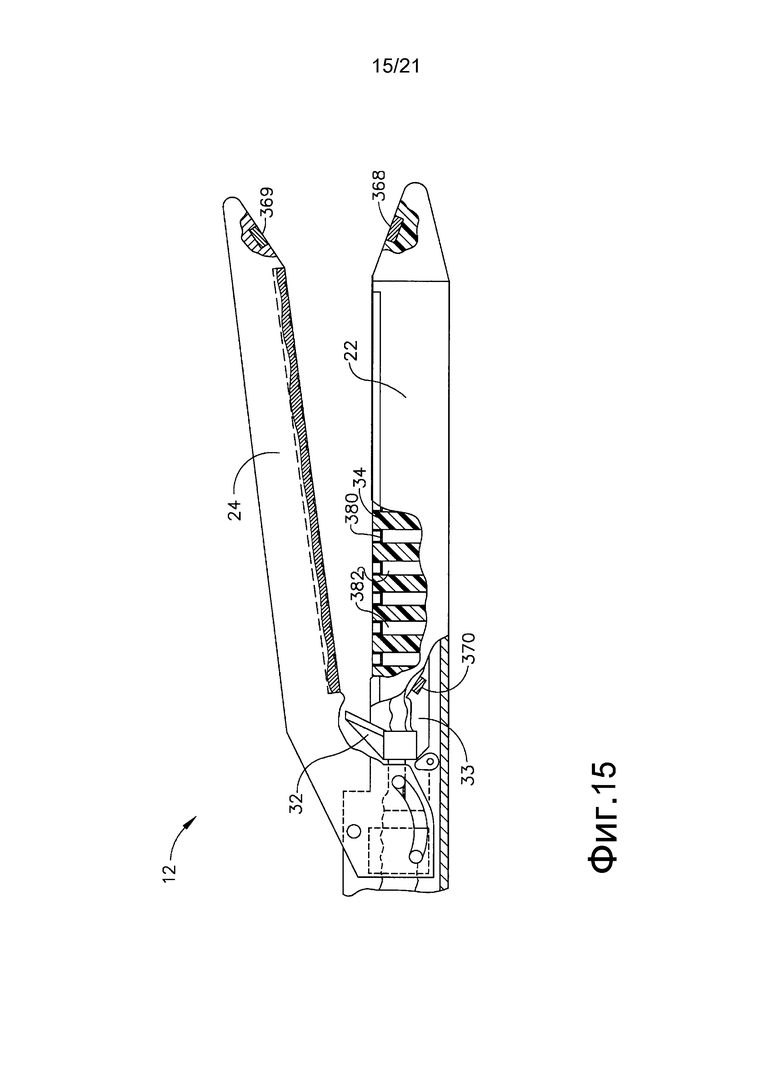
Фигура 15 является схемой концевого зажима 12, содержащего ретранслятор 368, удерживаемый или встроенный в картридж 34 у дистального конца желоба 22. Ретранслятор 368 может быть соединен с картриджем 34 при помощи подходящего связующего материала, такого как эпоксидная смола. В этом варианте осуществления ретранслятор 368 содержит магниторезистивный датчик. Упорный элемент 24 у дистального конца также содержит постоянный магнит 369, который большей частью обращен к ретранслятору 368. В этом примерном варианте осуществления концевой зажим 12 также содержит постоянный магнит 370, соединенный с салазками 33. Это позволяет ретранслятору 368 определять открытое/закрытое состояние концевого зажима 12 (за счет перемещения постоянного магнита 369 ближе или дальше от ретранслятора при открытии и закрытии упорного элемента 24) и полноту операции сшивания/рассечения (за счет перемещения постоянного магнита 370 к ретранслятору 368 по мере прохождения салазок 33 по желобу 22, что является частью операции рассечения).
Фигура 15 также изображает скобки 380 и движущие механизмы скобок 382 картриджа со скобками 34. Как пояснялось ранее, в соответствии с различными вариантами осуществления, по мере прохождения салазками 33 желоба 22 салазки 33 приводят в действие движущие механизмы скобок 382, которые перемещают скобки 380 в рассеченные ткани, удерживаемые концевым зажимом 12, во время чего скобкам 380 придается необходимая форма при помощи упорного элемента 24. Как указывалось выше, такой хирургический режущий и сшивающий инструмент является одним из видов хирургических инструментов, с которым может успешно применяться настоящее изобретение. Различные варианты осуществления настоящего изобретения могут использоваться с любыми видами хирургических инструментов, имеющих один или более датчик-ретранслятор.
В одном из описанных выше вариантов осуществления батарея 64 обеспечивает энергией (по меньшей мере, частично) инструмент 10 во время сшивания. Таким образом, инструмент также может называться усилительным устройством. Более подробная информация и дополнительные варианты осуществления усилительных устройств описаны в приложении ‘573, которое включено в настоящий документ. Однако следует понимать, что инструмент 10 не обязательно должен быть усилительным устройством, и что это лишь пример вида устройств, в которых могут использоваться аспекты настоящего изобретения. Например, инструмент 10 может содержать пользовательский дисплей (такой как жидкокристаллический или светодиодный дисплей), который может получать энергию от батареи 64 и управляться устройством управления 300. На таком дисплее могут отображаться данные датчиков-ретрансляторов 368 концевого зажима 12.
В другом варианте осуществления вал 8 инструмента 10, включающего, например, проксимальную закрывающую трубку 40 и дистальную закрывающую трубку 42, вместе с этими элементами может служить частью антенны для устройства управления 300 за счет излучения сигналов к датчику-ретранслятору 368 и приема сигналов, испускаемых датчиком-ретранслятором 368. Таким образом, сигналы, испускаемые и принимаемые датчиком-ретранслятором в концевом зажиме 12, могут передаваться через вал 8 инструмента 10.
Проксимальная закрывающая трубка 40 может быть заземлена своим проксимальным концом при помощи деталей внешней нижней и верхней стороны 59-62, которые могут быть изготовлены из неэлектропроводного материала, такого как пластик. Компоненты приводного вала в сборе (включая основной приводной вал 48 и вспомогательный приводной вал 50) внутри проксимальных и дистальных закрывающих трубок 40, 42 также могут быть изготовлены из неэлектропроводного материала, такого как пластик. Более того, компоненты концевого зажима 12 (такие как упорный элемент 24 и желоб 22) могут быть электрически соединены с (или находиться в непосредственном или непрямом электрическом контакте) с дистальной закрывающей трубкой 42 таким образом, что они также могут служить частью антенны. Более того, датчик-ретранслятор 368 может быть расположен таким образом, чтобы он был электрически изолирован от компонентов вала 8 и концевого зажима 12, которые служат антенной. Например, датчик-ретранслятор 368 может располагаться в картридже 34, который может быть изготовлен из неэлектропроводного материала, такого как пластик. Поскольку дистальный конец вала 8 (такой как дистальный конец дистальной закрывающей трубки 42) и служащие антенной части концевого зажима 12 могут находиться на относительно близком расстоянии от датчика 368, мощность передаваемых сигналов может поддерживаться на низком уровне, тем самым минимизируя или уменьшая взаимодействие с другими системами в рабочей области инструмента 10.
В таком варианте осуществления, как показано на Фигуре 16, устройство управления 300 может быть электрически соединено с валом 8 инструмента 10 таким же образом, как и с проксимальной закрывающей трубкой 40 - при помощи проводящего соединительного элемента 400 (например, провода). Поэтому части наружного вала 8, такие как закрывающие трубки 40, 42, могут действовать как части антенны для устройства управления 300 за счет излучения сигналов для датчика 368 и приема сигналов от датчика 368. Входные сигналы, принимаемые устройством управления 300, могут быть демодулированы демодулятором 310 и дешифрованы декодером 312 (см. Фигура 12). Входные сигналы могут содержать данные от датчиков 368 концевого зажима 12, которые могут использоваться процессором 306 для управления различными деталями инструмента 10, такими как двигатель 65 или пользовательский дисплей.
Для передачи сигнала с данными к датчикам 368 в концевом зажиме 12 или от них соединительный элемент 400 может соединять устройство управления 300 с компонентами вала 8 инструмента 10 таким образом, чтобы проксимальная закрывающая трубка 40 могла электрически соединяться с дистальной закрывающей трубкой 42. Предпочтительнее, чтобы дистальная закрывающая трубка 42 была электрически изолирована от удаленного датчика 368, который может находиться в пластиковом картридже 34 (см. Фигура 3). Как упоминалось ранее, компоненты концевого зажима 12, такие как желоб 22 и упорный элемент 24 (см. Фигура 3), могут быть электропроводными и находиться в электрическом контакте с дистальной закрывающей трубкой 42 так, чтобы они тоже служили частью антенны.
Вместе с валом 8, действующим как антенна для устройства управления 300, устройство управления 300 может взаимодействовать с датчиком 368 в концевом зажиме 12 без непосредственного проводного соединения. Кроме того, поскольку расстояние между валом 8 и удаленным датчиком 368 постоянно и известно, уровень мощности сигнала может быть оптимизирован для его уменьшения и, как следствие, сокращения до минимума взаимодействия с другими системами в рабочей среде инструмента 10. Как описывалось выше, датчик 368 может содержать схемы связи для излучения сигналов для устройства управления 300 и приема сигналов от устройства управления 300. Схема связи может быть объединена с датчиком 368.
В другом варианте осуществления компоненты вала 8 и/или концевого зажима 2 могут служить антенной для удаленного датчика 368. В еще одном варианте осуществления удаленный датчик 368 электрически соединен с валом (таким как дистальная закрывающая трубка 42, которая может быть электрически соединена с проксимальной закрывающей трубкой 40) и устройством управления 300, которое изолировано от вала 8. Например, датчик 368 может быть соединен с проводящим компонентом концевого зажима 12 (таким как желоб 22), который, в свою очередь, может быть соединен с проводящими компонентами вала (например, закрывающими трубками 40, 42). В ином случае, концевой зажим 12 может содержать провод (не показан), который соединяет удаленный датчик 368 с дистальной закрывающей трубкой 42.
Обычно хирургический инструмент, такой как инструмент 10, перед использованием очищается и стерилизуется. В одном способе стерилизации инструмент 10 помещается в закрытый и герметичный контейнер 280, такой как контейнер или мешок из пластика или тайвека, как показано на Фигурах 17 и 18. Затем контейнер и инструмент помещаются в поле облучения, которое проникает в контейнер и может быть гамма-излучением, рентгеновским излучением или электронами высоких энергий. Излучение уничтожает бактерий на инструменте 10 и в контейнере 280. Затем стерильный инструмент 10 может храниться в стерильном контейнере 280. Герметичный стерильный контейнер 280 поддерживает стерильность инструмента 10 до тех пор, пока он не будет открыт в медицинском учреждении или некоторых других рабочих средах. Помимо излучения могут использоваться другие средства стерилизации инструмента 10, такие как этиленоксид или текучий пар.
Если для стерилизации инструмента 10 используется излучение, такое как гамма-излучение, компоненты устройства управления 300, в особенности память 308 и процессор 306, могут повреждаться и становиться нестабильными. Таким образом, в соответствии с различными вариантами осуществления настоящего изобретения, устройство управления 300 может быть запрограммировано после упаковки и стерилизации инструмента 10.
Как показано на Фигуре 17, удаленное программирующее устройство 320, которое может быть портативным устройством, может устанавливать беспроводную связь с устройством управления 300. Удаленное программирующее устройство 320 может испускать беспроводные сигналы, которые принимаются устройством управления 300, для программирования устройства управления 300 и питания устройства управления 300 во время операции программирования. Таким образом, батарея 64 не должна обеспечивать энергией устройство управления 300 во время операции программирования. в соответствии с различными вариантами осуществления, программный код, загружаемый в устройство управления 300, может иметь относительно малый вес, такой как 1МБ или менее, поэтому при желании может использоваться протокол с относительно малой скоростью передачи данных. Более того, удаленное программирующее устройство 320 может устанавливаться в непосредственной физической близости к хирургическому инструменту 10, благодаря чему может использоваться сигнал малой мощности.
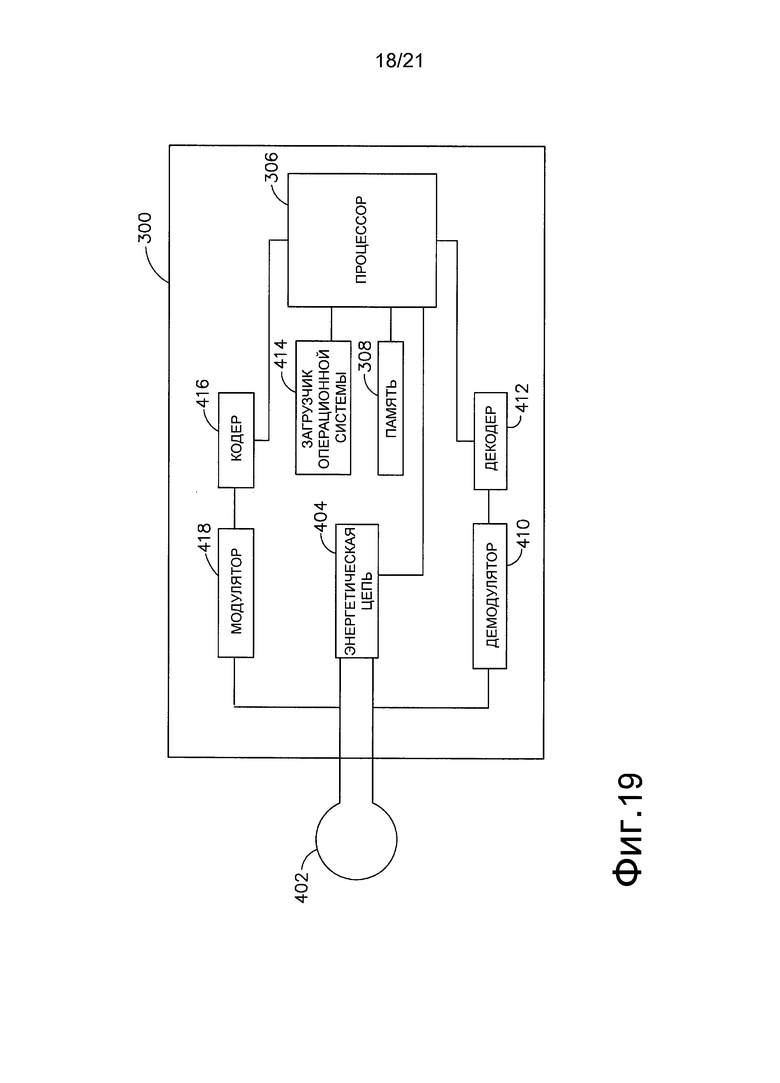
Возвращаясь к Фигуре 19, устройство управления 300 может содержать индуктивную катушку 402 для приема беспроводных сигналов от удаленного программирующего устройства 320. Часть полученного сигнала при помощи энергетической цепи 404 может использоваться для питания устройства управления 300, когда оно не получает энергию от батареи 64.
Входные сигналы, получаемые катушкой 402, действующей как приемная антенна, могут быть демодулированы демодулятором 410 и дешифрованы декодером 412. Входные сигналы могут содержать инструкции по программированию (например, код), которые могут храниться в энергонезависимой части памяти 308. Процессор 306 может выполнять код во время работы инструмента 10. Например, в соответствии с кодом процессор 306 посылает выходные сигналы к различным подсистемам инструмента 10, таким как двигатель 65, на основании данных, которые были получены от датчиков 368.
Устройство управления 300 может также содержать блок энергонезависимой памяти 414, который содержит код последовательности загрузки, который выполняется процессором 306. Если устройство управления 300 получает достаточное количество энергии от сигналов удаленного устройства управления 320 во время послестерилизационного программирования, процессор 306 может в первую очередь выполнить код последовательности загрузки («загрузчик операционной системы») 414, который может установить операционную систему процессора 306.
Устройство управления 300 также может посылать сигналы обратно к удаленному программирующему устройству 320, например, если это сигналы подтверждения и установления связи. Устройство управления 300 может содержать кодер 416 для шифрования сигналов, которые затем будут посылаться к программирующему устройству 320 и модулятору 418 для модулирования сигналов в соответствии со схемой модуляции. Катушка 402 может действовать как передающая антенна. Устройство управления 300 и удаленное программирующее устройство 320 могут взаимодействовать при помощи любых подходящих беспроводных протоколов связи (например, Bluetooth) и любой подходящей частоты (например, промышленного, научного и медицинского диапазона). Кроме того, устройство управления 300 может передавать сигналы в диапазоне частот, который отличается от диапазона частот сигналов, получаемых от удаленного программирующего устройства 320.
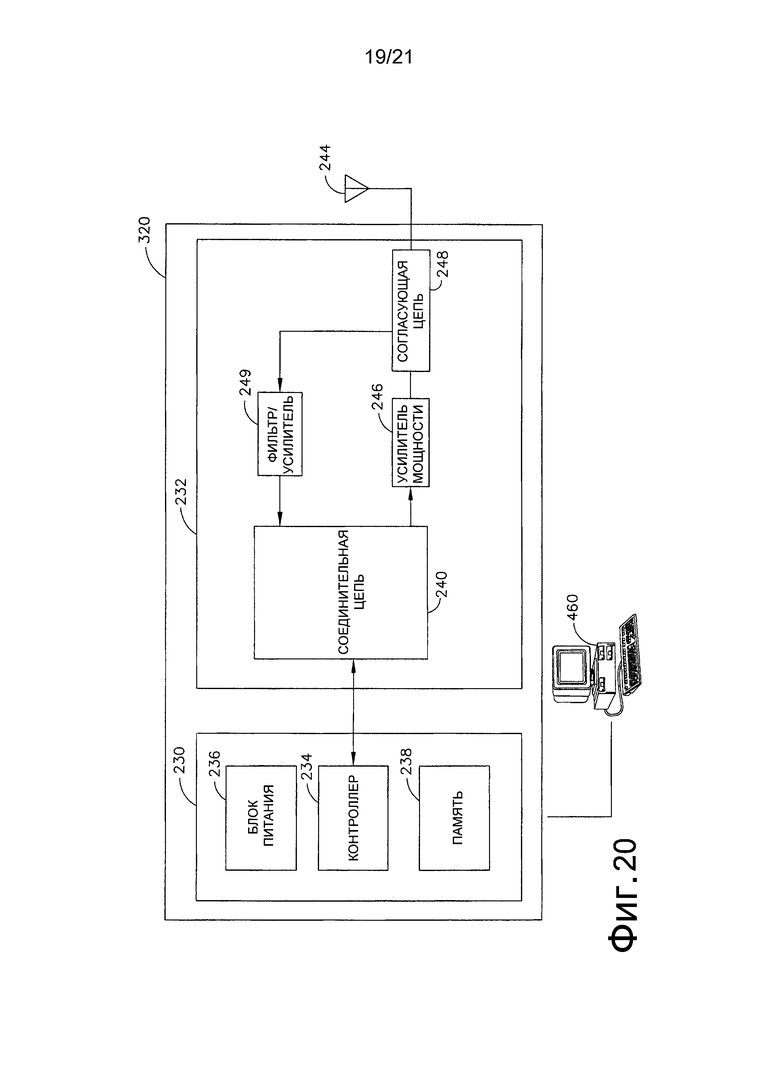
Фигура 20 является упрощенной схемой удаленного программирующего устройства 320 в соответствии с различными вариантами осуществления настоящего изобретения. Как показано на Фигуре 20, удаленное программирующее устройство 320 может содержать основную плату управления 230 и плату подъема антенны 232. Основная плата управления 230 может содержать контроллер 234, блок питания 236 и запоминающее устройство 238. Запоминающее устройство 238 может хранить указания по работе контроллера 234, как и инструкции по программированию, которые могут быть переданы в устройство управления 300 хирургического инструмента 10. Блок питания 236 может обеспечивать стабильное напряжение постоянного тока для компонентов удаленного программирующего устройства 320 при помощи внутренней батареи (не показана) или внешнего источника питания переменного или постоянного тока (не показан).
Плата подъема антенны 232 может содержать соединитель цепи 240, который соединяется с контроллером, например, 234 при помощи шины I2C. Соединитель цепи 240 может взаимодействовать с устройством управления 300 хирургического инструмента при помощи антенны 244. Соединитель цепи 240 может справляться с модулированием/демодулированием и шифрованием/дешифрованием операций по передаче информации при помощи устройства управления. В соответствии с другими вариантами осуществления удаленное программирующее устройство 320 может содержать импульсный модулятор, демодулятор, кодер и декодер. Как показано на Фигуре 20, плата подъема антенны 232 может также содержать усилитель передаваемой энергии 246, согласующую цепь 248 для антенны 244 и фильтр/усилитель 249 для принимаемых сигналов.
В соответствии с другими вариантами осуществления, как показано на Фигуре 20, удаленное программирующее устройство может взаимодействовать с компьютерным устройством 460, таким как персональный или портативный компьютер, например, при помощи USB и/или RS232 интерфейса. В такой конфигурации память компьютерного устройства 460 может храниться в инструкциях по программированию, которые пересылаются в устройство управления 300. В другом варианте осуществления компьютерное устройство 460 может быть сконфигурировано с системой беспроводной передачи для передачи инструкций по программированию в устройство управления 300.
Кроме того, в соответствии с другими вариантами осуществления, вместо индуктивной связи между устройством управления 300 и удаленным программируемым устройством 320 может использоваться емкостная связь. В еще одном варианте осуществления устройство управления 300 вместо катушки может содержать плату, как и удаленное программирующее устройство 320.
В другом варианте осуществления вместо беспроводной связи между устройством управления 300 и удаленным программирующим устройством 320 программирующее устройство 320 может быть физически соединено с устройством управления 300, пока инструмент 10 находится в стерильном контейнере 280 таким образом, что инструмент 10 остается стерильным. Фигура 21 является схемой упакованного инструмента 10 в соответствии с таким вариантом осуществления. Как показано на Фигуре 22, рукоятка 6 инструмента 10 может содержать внешний интерфейс подключения 470. Контейнер 280 может дополнительно содержать интерфейс подключения 472, который соединяется с внешним интерфейсом подключения 470 инструмента 10, когда инструмент 10 упакован в контейнер 280. Программирующее устройство 320 может содержать внешний интерфейс подключения (не показан), который может соединяться с интерфейсом подключения 472 на наружной поверхности контейнера 280, тем самым обеспечивая проводную связь между программирующим устройством 320 и внешним интерфейсом подключения 470 инструмента 10.
Описанное выше изобретение также применимо к роботизированным хирургическим системам. Такие системы хорошо известны в данной области техники и включают таковые производства компании Intuitive Surgical, Inc., Саннивейл, Калифорния. Примеры также приведены в патентах США № 6783524; 7524320; и № 7824401. Все они включены в настоящий документ посредством ссылки.В целом, роботизированные хирургические системы содержат дистанционно управляемый пользовательский интерфейс, содержащий дистанционно управляемую руку, которая сконфигурирована для взаимодействия и работы с хирургическими инструментами и системами. Руки управляются электронными системами управления, которые обычно приспособлены для взаимодействия с пользователем посредством локализованного пульта управления. Инструменты могут получать питание или от местной хирургической системы, или иметь собственные системы питания под общим управлением робота.
Роботизированные хирургические системы включают активирующий механизм, монитор, робота и, по меньшей мере, одно надежно закрепленное загрузочное устройство, прикрепленное к руке робота, содержащей, по меньшей мере, один хирургический инструмент для решения, по меньшей мере, одной хирургической задачи, сконфигурированный для надежного прикрепления к дистальному концу руки.
Еще один вариант осуществления роботизированной хирургической системы содержит процессор, по меньшей мере, один кодовый датчик для определения положения, по меньшей мере, одного приводного сочленения, приемник для получения электрических сигналов, передаваемых сшивающей установкой и контролирующих ее движение.
Примерные одноразовые загрузочные устройства для использования с роботами описываются в патенте США № 6231565 Тови и соавторы. Пример хирургического робота с соответствующим хирургическим управлением описывается в патенте США № 5624398 Смит и соавторы.
Другим аспектом настоящего изобретения роботизированной системы являются кадры и роботизированная рука, которая подвижна относительно кадров и имеет сшивающий аппарат в сборке с продолговатой трубкой, соединяющей сшивающий аппарат в сборе и роботизированную руку. Продолговатая трубка со сшивающим аппаратом в сборе и сам сшивающий аппарат в сборе во время работы прикрепляются с возможностью отсоединения к руке робота. Одна конфигурация сшивающего аппарата в сборе может быть удалена, после чего для работы может быть прикреплена другая конфигурация.
В соответствии с Фигурами 4-5 роботизированные системы содержат стыковочный элемент, который прикрепляется с возможностью отсоединения к проксимальному концу закрывающей трубки 40 и радиально соединяться с проксимальным концом рычажка привода ротора 48. Соединение далее конфигурируется для фиксирования проксимального конца держателя желоба 46, который находится между внутренними поверхностями заглушки 271, которая также взаимодействует с держателем желоба 46.
Различные варианты осуществления настоящего изобретения были описаны выше в связи с хирургическими инструментами режущего типа. Однако следует заметить, что в других вариантах осуществления изобретенный хирургический инструмент, который был описан в настоящем документе, не должен быть режущим инструментом, взамен этого он может использоваться с любым типом хирургических инструментов, содержащих удаленные датчики-ретрансляторы. Например, он может быть нережущим эндоскопическим инструментом, зажимом, сшивающим инструментом, клипсонакладывателем, устройством доступа, устройством для введения медикаментов/генной терапии и устройством подачи энергии для проведения ультразвуковых, РЧ- или лазерных процедур и т.д. Кроме того, настоящее изобретение может быть, например, лапароскопическим инструментом. Настоящее изобретение также может применяться как в традиционных инструментах для эндоскопических и открытых хирургических вмешательств, так и в роботизированной хирургии.
Устройства, описанные в настоящей заявке, могут быть выполнены с возможностью утилизации после одноразового использования или могут быть выполнены с возможностью использования множества раз. Однако в каждом случае после, по меньшей мере, одного использования устройство можно использовать повторно после поготовки к повторному использованию. Она может включать в себя любую комбинацию стадий разборки устройства, затем чистки или замены отдельных элементов и последующей повторной сборки. В частности, можно разобрать устройство и избирательно заменить или удалить в любой комбинации любое количество отдельных элементов или частей устройства. После чистки и/или замены отдельных частей устройство можно снова собрать в центрах по ремонту или в операционном блоке непосредственно перед хирургической операцией для последующего использования. Специалистам в данной области будет очевидно, что при восстановлении устройства можно использовать различные способы разборки, чистки/замены и повторной сборки. Использование таких способов, а также полученное в результате восстановленное устройство входят в сферу действия настоящей заявки.
Хотя настоящее изобретение описано в настоящем документе применительно к определенным раскрываемым вариантам осуществления изобретения, к описанным вариантам могут быть применены различные вариации и модификации. Например, можно использовать различные виды концевых зажимов. Кроме того, для изготовления определенных компонентов, материал которых был указан в описании, могут быть использованы другие материалы. Подразумевается, что представленное выше описание и приложенная формула изобретения охватывают все возможные изменения и дополнения.
Любой патент, публикация или другое описание, которое полностью или частично включено в настоящий документ путем ссылки, является составной частью настоящего документа в той степени, в которой она не противоречит определениям, положениям или другому описанию, представленному в настоящем документе. В связи с этим описание, представленное в настоящем документе, в той мере, в которой это необходимо, превалирует над любой информацией, противоречащей положениям настоящего документа, которая была включена в указанный документ путем ссылки. Любой материал или его часть, которая включена в настоящий документ путем ссылки, и которая противоречит указанным определениям, положениям или другому описанию, представленному в настоящем документе, включается в настоящий документ в той мере, в которой между включенным путем ссылки материалом и настоящим документом с описанием не возникает противоречий.














Изобретение относится к медицине. Хирургический инструмент включает электропроводный вал, концевой зажим и дистальный сшивающий блок для решения по меньшей мере одной хирургической задачи, который функционально связан с дистанционно управляемым пользовательским интерфейсом. Концевой зажим имеет по меньшей мере один датчик. Электропроводный вал имеет дистальный конец, соединенный с концевым зажимом. Датчик электрически изолирован от вала. Инструмент включает разъем на проксимальном конце вала, сконфигурированный для приема механических или электрических входов. Принимающий блок электрически изолирован от вала и сконфигурирован для приема и отправки беспроводных сигналов от датчика или к датчику. 22 ил.
Хирургический инструмент, содержащий:
концевой зажим, содержащий по меньшей мере один датчик;
дистальный сшивающий блок для решения по меньшей мере одной хирургической задачи, функционально связанный с дистанционно управляемым пользовательским интерфейсом;
электропроводный вал, имеющий дистальный конец, соединенный с концевым зажимом, причем датчик электрически изолирован от вала; и
разъем на проксимальном конце вала, сконфигурированный для приема по меньшей мере одного механического или электрического входа; и
принимающий блок, электрически изолированный от вала и сконфигурированный для приема и отправки беспроводных сигналов от датчика и к датчику, причем
по меньшей мере один датчик содержит одно из:
магниторезистивного датчика,
датчика давления,
RFID-датчика,
MEMS-датчика,
электромеханического датчика.
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Хирургический сшивающий аппарат для наложения линейных швов | 1980 |
|
SU1042742A1 |
| Хирургический инструмент | 1977 |
|
SU733670A1 |

