Изобретение относится к технике исследования материалов с помощью рентгеновского излучения, а более конкретно к способу повышения контрастности изображения с ультравысоким (суб-пс) временным разрешением.
Известен микрофокусный источник рентгеновского излучения, снабженный системой терморегулировании блока фокусировки [1]. Недостатками устройства являются невозможность изменения положения фокуса относительно мишени и изменение размера фокусного пятна, а значит и размера рентгеновского источника. Кроме того, устройство не обеспечивает возможность проведения рентгеновской диагностики с временным разрешением, вплоть до суб-пс.
Известен источник рентгеновского излучения для проведения фазово-контрастной рентгенографии [2], в котором отношение количества рентгеновских фотонов, поступающих на детектор рентгеновского излучения, к общему количеству испущенных рентгеновских фотонов составляет 45% или более.
Недостатками устройства по патенту является отсутствие сигнала обратной связи для контроля размера источника, а также невозможность проведения рентгеновской диагностики с временным разрешением, вплоть до суб-пс. Недостатками устройства являются невозможность изменения положения фокуса относительно мишени, что не позволяет изменить размер фокусного пятна, а значит и размер рентгеновского источника. Устройство также не обеспечивает проведения рентгеновской диагностики с временным разрешением.
Также известен микрофокусный источник характеристических рентгеновских лучей для фазо-контрастных изображений, основанный на фемтосекундном волоконном лазере [3]. В статье описывается способ повышения контрастности изображения при рентгеновском исследовании образца, заключающийся в том, что лазерный импульс с помощью объектива фокусируют на поверхность мишени, установленной на позиционере, обеспечивающим изменение мишени в шести направлениях.
Основным недостатком устройства является невозможность автоматической корректировки положение мишени, что приводит к постепенному уменьшению уровня сигнала со временем за счет стачивания поверхности мишени лазерными импульсами. В свою очередь этот фактор вызывает нежелательное снижение контрастности изображения и пространственного разрешения при рентгеновском исследовании образца.
Кроме того, недостатком также является незначительный поток фотонов, а именно: 108 фотонов/с в 2π по сравнению с 1.5*109 фотонов/с в 2π, который достигается при использовании предлагаемого способа.
Технической задачей изобретения является увеличение контрастности изображения и пространственного разрешения при проведении исследования образцов, а техническим результатом повышение точности их исследования рентгеновским методом.
Решение поставленной технической задачи и достижение требуемого технического результата обеспечиваются в результате того, что в способе рентгеновского исследовании образца, заключающимся в том, что излучение высокочастотной фемтосекундой лазерной системы остро фокусируется на поверхность мишени, установленную на позиционере, обеспечивающим изменение пространственного положения мишени в шести направлениях, обеспечивают оптимизацию положения мишени относительно фокуса объектива путем компенсации неидеальности положения рабочей плоскости мишени относительно плоскости нормали падения лазерного луча, а также линейного тренда, возникающего из-за стачивания поверхности мишени при лазерной абляции, для чего оптическое изображение области фокусировки лазерного излучения, из которого выделяют составляющую второй гармоники, генерируемый на лазерно-индуцированной микроплазме с помощью цифровой камеры и спектрометра, направляют на управляющую ЭВМ, которая подает сигнал, сформированный на базе применения нейронной сети для корректировки положения мишени. При этом частота излучения высокочастотной фемтосекундой лазерной системы более 500 кГц.
В способе применяют нейронную сеть машинного обучения с подкреплением, которая базируется на алгоритме DQN-learning (Deep Q Network) - это безмодельный алгоритм обучения с подкреплением, в котором используется нейронная сеть для оценки Q-функции (упрощая, оценивает наиболее оптимальное действие, чем выше значение Q-функции - тем оптимальнее будет действие). На вход сети подается текущее состояние среды (интенсивность сигнала обратной связи и текущая координата), на выходе значение Q-функции для каждого возможного действия (движение вперед, движение назад, ожидание). Чем выше значение Q-функции, тем более «выигрышное» действие будет совершено - т.е. она более всего повышает уровень обратной связи (или оставляет его максимально высоким).
Существо предложенного изобретения поясняется схемой и графиками, представленными на фигурах.
Фиг. 1 - схема установки, в которой реализуется предлагаемый способ повышения контрастности изображения и пространственного разрешения при рентгеновском исследовании образца
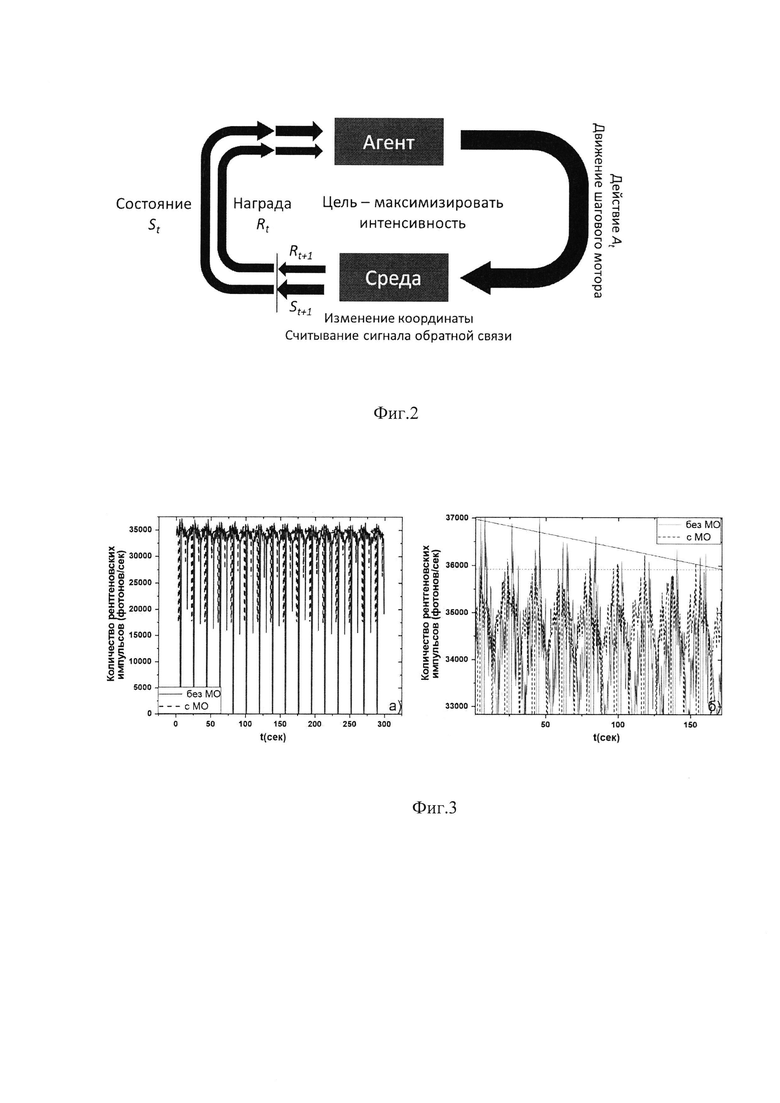
Фиг. 2 - Схематичное изображение принципа работы алгоритма.
Фиг. 3 Динамика изменение количества регистрируемых сцинтилляционным детектором рентгеновских фотонов в секунду с включенными алгоритмами машинного обучения - МО (пунктирная линия) и с выключенными алгоритмами машинного обучения (сплошная линия). а) Динамика на масштабе 5 минут, б) увеличенная область графика а) сплошной линией показано уменьшение амплитуды сигнала из-за «стачивания» поверхности мишени и ухода фокуса с поверхности мишени, пунктирной линией показан неменяющийся уровень максимальной амплитуды сигнала.
Фиг. 4 Фото установки в рабочем состоянии.
Способ реализуют в установке (фиг. 1), содержащей фемтосекундную лазерную систему 1, изолятор Фарадея 2, дихроичное зеркало 3, полуволновую пластину 4, дихроичное зеркало 5, кварцевую пластину 6 и фотодетектор 7. За последним установлен расширитель пучка 8 и дихроичные зеркала 9 и 10, а также фокусирующий объектив 11 и - система поддува 12. На моторизированном трансляторе 13 установлена мишень 14. Рентгеновское излучение от мишени поступает на образец 15 и - рентгеновский детектор 16. Для контроля положения мишени 14 на моторизированном трансляторе 13 применен контроллер 17 шаговых двигателей, который подключен к управляющему компьютеру 18. Для направления части пучка излучения от дихроичного зеркала 10 применены зеркала 19 и 20. Далее в установке размещены: делитель пучка 21, фокусирующая линза 22, ПЗС камера 23, фокусирующая линза 24, дихроичные зеркала 25, 26, 27 и спектрометр 28. Кроме того, применяется пара контрольных ПЗС камер 29
Способ осуществляют следующим образом.
Излучение от выходного окна лазера 1 пропускают через изолятор Фарадея 2, который необходим для избегания обратного отражения лазерного пучка в тракте. Далее с помощью дихроичного зеркала 3 лазерный пучок направляют через управляющую поляризацией лазерного импульса полуволновую пластину 4 на зеркало 5. Излучение, отраженное зеркалом 5, поступает на тонкую кварцевую пластину 6, отщепляющую часть излучения на фотодетектор 7, который используется для контроля энергии лазерного импульса. За зеркалом 6 лазерный пучок проходит через расширитель пучка 8, увеличивающий его размер в 2 раза. Зеркало 9 заводит лазерный импульс на дихроичное зеркало 10, которое пропускает излучения на длине волны 515 нм и отражает излучение на длине волны 1030 нм. С помощью зеркала 10 лазерное излучение заводится в объектив 11 и далее поступает на установленную на моторизированном трансляторе 13 подвижную мишень 14, фокусируясь на ее поверхности. Перемещение мишени обеспечивается моторизированным транслятором 13, который дает возможность изменить положение мишени в шести направлениях.
В качестве мишени применен вращающейся и циклично перемещающийся по вертикали с постоянной скоростью медный цилиндр, боковая поверхность которого отполирована. С помощью системы поддува 12 мишень 14 обдувают либо сжатым воздухом, либо гелием, что позволяет уменьшить число аблированных частиц в области взаимодействия излучения с поверхностью мишени. Рентгеновский пучок, генерируемый на поверхности мишени лазерным импульсом, проходит сквозь исследуемый объект 15 и поступает на рентгеновскую камеру 16. Моторизированный транслятор 13 управляется контроллером шаговых двигателей 17. Данный контроллер подключен к управляющему компьютеру 18, который осуществляет полный контроль всей электронной компонентой данного устройства
На поверхности мишени 14 также генерируется вторая гармоника лазерного излучения (515 нм), которая собирается объективом 11 и с помощью зеркал 19 и 20 направляется на делитель пучка 21. Он делит излучение второй гармоника в соотношении ~ 50:50. Первая часть излучения с помощью линзы 21 фокусируется на матрицу ПЗС камеры 23. Вторая часть излучения с помощью линзы 24 и зеркал 25, 26 и 27 фокусируется в спектрометр 28. Длинное плечо (порядка 1 метра оптического пути) необходимо, чтобы пространственно разнести сигналы второй гармоники и люминесценции плазмы, генерируемой лазерном импульсом на поверхности мишени 14 - они имеют разную расходимость, а значит фокусируются в разных точках. Область взаимодействия лазерного импульса с поверхностью мишени 14 дополнительно визуально контролируется с помощью пары ПЗС камер 29. Сигналы с камеры 23 и спектрометра 28 (показаны штриховой линией) поступают на управляющий компьютер 18, с помощью которого осуществляется контроль всех операций устройства.
Разработанный программно-аппаратный комплекс нейронной сети основан на алгоритме DQN-learning Deep Q-Network (DQN) - это популярный алгоритм, используемый в обучении с подкреплением, который объединяет алгоритм Q-обучения с глубокими нейронными сетями, чтобы обучить агента оптимальным стратегиям действий в заданной среде. Окружение - это среда или объект (в нашем случае, текущие координаты и амплитуда сигнала обратной связи), на который воздействует Агент, в то время как Агент представляет собой алгоритм обучения с подкреплением. Процесс начинается с того, что Окружение отправляет свое начальное состояние (state=s) Агенту, который затем, на основании своих значений, предпринимает действие (action=а - либо движение, либо отсутствие действий) в ответ на это состояние. После чего Окружение отправляет Агенту новое состояние (state'=s') и награду (reward=r) Агент обновляет свои знания наградой, возвращенной окружением, за последнее действие и цикл повторится. Цикл повторяется до тех пор, пока не выполнятся условия окончания обучения (либо заданное количество действий, либо уровень ошибки достигает заданного значения). В DQN агент учится выбирать действия на основе максимального ожидаемого будущего вознаграждения, используя нейронную сеть для приближения функции Q-значений, которая представляет ожидаемое вознаграждение за выполнение действия в заданном состоянии. Нейронная сеть принимает текущее состояние на вход и выдает Q-значение для каждого возможного действия (Фиг. 2). Q-функция вычисляется по следующей формуле:
Q*(st, at)=rt+γmaxaQ(st+1, at+1), (1)
где γ - число в интервале (0,1), показывающий на сколько «жадный» алгоритм, если γ стремится к 0, то алгоритм действует максимально «жадным» образом, стремясь максимизировать следующее действие, если γ стремится к 1, то алгоритм стремится максимизировать выгоду на большем масштабе, a rt - награда на данном шаге. Во время процесса обучения агент взаимодействует со средой и сохраняет свой опыт (т.е. состояние, действие, вознаграждение и следующее состояние) в буфере памяти. Вначале агент действует случайным образом, причем вероятность случайных действий экспоненциально затухает с течением времени.
Затем агент выбирает случайный мини-набор полученной информации из буфера и использует его для обновления функции Q-значений путем минимизации разницы между предсказанными Q-значениями и фактическими полученными вознаграждениями.
Алгоритм DQN (RL) реализован на основе 2х линейных слоев, состоящих из 256 нейронов. Обучение производилось на видеокарте Nvidia RTX 3070. Параметры обучения: размер памяти 100000 элементов, размер батча 1024 элемента, скорость обучения 10-4, оптимизатор Adam, критерий ошибки MSE-loss, скорость затухание ошибки 5*10-4. Код представлен в открытом доступе [5].
Построение функции ошибки.
Основной корректной работы алгоритма является грамотный выбор награды. В случае некорректного задания функции награды нейронная сеть будет нестабильна, или обучаться слишком медленно. В рамках данной установки у нейронной сети есть выбор из трех основных действий: пауза, движение влево и движение вправо. Причем требуется переместиться в область с максимальным сигналом обратной связи и удерживаться там максимально долго. Поэтому функции награды рассчитывалась следующим образом:
• -3 в случае если нейронная сеть предлагает покинуть область движения (движения в этом случае не происходит)
• -1*(It-1-It)+(It-Imax)/Imax, где It - амплитуда сигнала на текущем шаге, It-1 - амплитуда сигнала на предыдущем шаге, Imax - максимальная амплитуда за все предыдущие шаги, в случае если за данный шаг происходит уменьшение амплитуды обратной связи
• (It-1-It)+(It-Imax)/Imax, в случае если за данный шаг происходит увеличение амплитуды обратной связи
• 0.5, если пауза осуществляется в диапазоне 0.9 Imax-Imax (из-за флуктуаций сигнала обратной связи).
• -(It-Imax)/Imax, если пауза осуществляется в диапазоне 0.91 Imax-Imax (чтобы избежать остановок вне оптимума).
Таким образом, в случае задания функции награды, функция ошибок не растет экспоненциально (только на границах, что корректно), причем нейронная сеть получает положительные значения награды в области максимального сигнала, а также при движении к максимуму. Благодаря этому обеспечивается высокая стабильность при реализации способа.
Пример реализации способа.
Излучение фемтосекундного иттербиевого волоконного лазера ANTAUS-10W-40u/250K (1) («Авеста-проект», Троицк, Россия) с длиной волны излучения 1030 нм, средней мощностью до 20 Вт (частота повторения импульсов составляла 2.0 МГц, с максимальной энергией импульса, достигающей 10 мкДж, длительностью лазерного импульса ~ 280 фс, М2=1.2) направляли из выходного окна на изолятор Фарадея. Изолятор необходим для избегания обратного отражения лазерного пучка в тракте. Далее с помощью дихроичного зеркала 3 лазерный пучок направлялся на зеркало 5, проходя при этом через полуволновую пластину 4, управляющего поляризацией лазерного импульса. В оптическом тракте между зеркалами 5 и 9 расположена тонкая кварцевая пластина, отщепляющая часть излучения на фотодетектор 7, который используется для контроля энергии лазерного импульса, а также расширителя пучка 8, увеличивающий размер пучка в 2 раза.
Лазерный импульс через зеркало заводят на дихроичное зеркало 10, которое пропускает излучения на длине волны 515 нм и отражает излучение на длине волны 1030 нм. С помощью зеркала 10 лазерное излучение заводится в объектив 11, фокусирующий лазерный импульс на поверхность вращающейся мишени 14, установленной на моторизированном трансляторе 13.
В качестве мишени был применен вращающейся и циклично перемещающийся по вертикали с постоянной скоростью 50 мм/мин медный цилиндр (диаметр 44 мм, толщина 8 мм, угловая скорость вращения составила 5000 об/мин). Боковая поверхность мишени была отполирована (шероховатость не более 0.5 мкм). С помощью системы поддува 12 в область лазерного воздействия дополнительно вдували либо сжатый воздух, либо гелий. Наличие системы поддува позволило уменьшить число аблированных частиц в области взаимодействия излучения с поверхностью мишени.
Исследуемый объект был установлен в точке, в которой генерируемый на поверхности мишени лазерным импульсом рентгеновский пучок проходит сквозь объект и попадает на рентгеновскую камеру 16. Моторизированный транслятор 13, обеспечивал оптимальное положение мишени.
Контроллер был подключен к управляющему компьютеру, который осуществляет полный контроль всей электронной компонентой данного устройства. На поверхности мишени, также генерируется вторая гармоника (515 нм), которая собирается объективом 11 и с помощью зеркал 19 и 20 направляется на делитель пучка 21 Он делит излучение второй гармоника в соотношении ~ 50:50. Первая часть излучения с помощью линзы (22) фокусировалась на матрицу ПЗС камеры 23. Вторая часть излучения с помощью линзы 24 и зеркал 25, 26 и 27 фокусируется в спектрометр 28. Длинное плечо необходимо, чтобы пространственно разнести сигналы второй гармоники и люминесценции плазмы - они имеют разную расходимость, а значит фокусируются в разных точках. Область взаимодействия дополнительно визуально контролировалась с помощью ПЗС камер 29. Сигналы с ПЗС камер и спектрометра поступали на управляющий компьютер.
Сбор сигнала был полностью автоматизирован с помощью LabVIEW - одновременно регистрировали интенсивность рентгеновского сигнала, размер источника (по сигналу второй гармоники), спектр второй гармоники и интенсивность сигнала второй гармоники. Интенсивность сигнала второй гармоники однозначно определяет количество рентгеновских квантов, генерируемых при абляции медной мишени, поэтому в качестве сигнала обратной связи использовалась спектральная яркость на длине волны 515 нм. Для передачи данных в нейросеть на компьютере был использован UDP сервер. Для управления нейросетью шаговыми двигателями применяли протокол http для управления контроллером шаговых двигателей. В такой конфигурации удалось добиться скорости работы в 10 Гц. Нейронная сеть управляла шаговым двигателем, двигающим мишень вдоль оптической оси. Эффективность предлагаемого способа иллюстрируется графиками на фиг.3. Как показали эксперименты машинное обучение с подкреплением позволяет в процессе обучения определить основные периодические изменения в сигнале - а именно осцилляции, связанные с биением мишени (Фиг. 3а) и линейный тренд, возникающий из-за стачивания мишени в результате фемтосекундной лазерной абляции: в результате фокус «уходит» с поверхности мишени, что приводит к линейному тренду, наблюдаемому на (Фиг. 3б). Линейный тренд нивелируется плавным смещением мишени, так чтобы фокус всегда оставался на поверхности, причем скорость может адаптивно варьироваться в процессе работы. А осцилляции мишени компенсируется периодическим движением мишени синфазно с этими колебаниями, так, чтобы фокус оставался на поверхности мишени. Причем, амплитуда, частота и фаза также адаптивно подстраиваются с течением времени.
Фотография установки, с помощью которой был реализован предлагаемый способ, приведена на фиг. 4.
Таким образом, предлагаемый способ в результате применения алгоритмов машинного обучения полностью компенсирует линейный тренд, а также уменьшить амплитуду осцилляций в 2-3 раза по сравнению с работой без машинного обучения. Данный факт свидетельствует о целесообразности применения предлагаемого способа в промышленности.
Источники информации
1. CN 203216877 U, "Combined device for scattering X-rays at small angle and wide angle ", МПК G01N 23/203 опубл. 2013-09-25.
2. ЕР 1879021 (A2) "Phase contrast radiography with a microfocus tube providing X-rays having an average energy between 10 and 20 keV" МПК G01N 23/203. опубл. 2008-01-16.
3. Garmatina, A.A., Asadchikov, V.E., Buzmakov, A.V. et al. Microfocus Source of Characteristic X-Rays for Phase-Contrast Imaging Based on a Femtosecond Fiber Laser. Crystallogr. Rep. 67, 1026-1033 (2022).
4. V. Mnih et al., "Human-level control through deep reinforcement learning," Nature, vol. 518, no. 7540, pp. 529-533, 2015, doi: 10.1038/nature14236.]. Deep Q-Network (DQN)
5. https://github.com/EvgMar/X_ray_AI.git.
| название | год | авторы | номер документа |
|---|---|---|---|
| МИКРООБРАБАТЫВАЮЩЕЕ УСТРОЙСТВО И СПОСОБ МОНИТОРИНГА ПРОЦЕССА МИКРООБРАБОТКИ ПОВЕРХНОСТИ ПРИ ВОЗДЕЙСТВИИ НА НЕЁ ИНТЕНСИВНЫМИ СФОКУСИРОВАННЫМИ ФЕМТОСЕКУНДНЫМИ ЛАЗЕРНЫМИ ИМПУЛЬСАМИ | 2024 |
|
RU2839712C1 |
| ДВУХФОТОННЫЙ СКАНИРУЮЩИЙ МИКРОСКОП С АВТОМАТИЧЕСКОЙ ТОЧНОЙ ФОКУСИРОВКОЙ ИЗОБРАЖЕНИЯ И СПОСОБ АВТОМАТИЧЕСКОЙ ТОЧНОЙ ФОКУСИРОВКИ ИЗОБРАЖЕНИЯ | 2012 |
|
RU2515341C2 |
| СПОСОБ ФОКУСИРОВКИ ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ НА ОБЪЕКТ | 2018 |
|
RU2685573C1 |
| СПОСОБ ФОРМИРОВАНИЯ ДЕФЕКТОВ В ОБЪЕМЕ ОБРАЗЦА ДИЭЛЕКТРИКА ЛАЗЕРНЫМ ИЗЛУЧЕНИЕМ | 2017 |
|
RU2671150C1 |
| Микрофокусный рентгеновский источник | 2023 |
|
RU2802925C1 |
| ЛИНЗА ДЛЯ РЕНТГЕНОВСКОГО ИЗЛУЧЕНИЯ | 2017 |
|
RU2692405C2 |
| ФОКУСИРУЮЩАЯ РЕЗОНАТОРНАЯ СИСТЕМА | 2020 |
|
RU2737345C1 |
| УСТРОЙСТВО ДВУХСТОРОННЕЙ ОПТИЧЕСКОЙ СВЯЗИ | 2006 |
|
RU2328077C1 |
| СПОСОБ НАВЕДЕНИЯ ЧАСТОТНО ПРЕОБРАЗОВАННОГО ИЗЛУЧЕНИЯ КАНАЛА ЛАЗЕРНОЙ УСТАНОВКИ НА МИШЕНЬ | 2021 |
|
RU2758944C1 |
| ЛАЗЕРНАЯ ПРОЕКЦИОННАЯ СИСТЕМА ОТОБРАЖЕНИЯ ТЕЛЕВИЗИОННОЙ ИНФОРМАЦИИ (ВАРИАНТЫ) | 1995 |
|
RU2104617C1 |


Использование: для рентгеновского исследования образца. Сущность изобретения заключается в том, что излучение высокочастотной фемтосекундой лазерной системы остро фокусируется на поверхность мишени, установленную на позиционере, обеспечивающим изменение пространственного положения мишени в шести направлениях, при этом обеспечивают оптимизацию положения мишени относительно фокуса объектива путем компенсации неидеальности положения рабочей плоскости мишени относительно плоскости нормали падения лазерного луча, а также линейного тренда, возникающего из-за стачивания поверхности мишени при лазерной абляции, для чего оптическое изображение области фокусировки лазерного излучения, из которого выделяют составляющую второй гармоники, генерируемую на лазерно-индуцированной микроплазме с помощью цифровой камеры и спектрометра, направляют на управляющую ЭВМ, которая подает сигнал, сформированный на базе применения нейронной сети. Технический результат: увеличение контрастности изображения и пространственного разрешения при проведении исследования образцов. 2 з.п. ф-лы, 4 ил.
1. Способ рентгеновского исследования образца, заключающийся в том, что излучение высокочастотной фемтосекундой лазерной системы остро фокусируется на поверхность мишени, установленную на позиционере, обеспечивающим изменение пространственного положения мишени в шести направлениях, отличающийся тем, что обеспечивают оптимизацию положения мишени относительно фокуса объектива путем компенсации неидеальности положения рабочей плоскости мишени относительно плоскости нормали падения лазерного луча, а также линейного тренда, возникающего из-за стачивания поверхности мишени при лазерной абляции, для чего оптическое изображение области фокусировки лазерного излучения, из которого выделяют составляющую второй гармоники, генерируемую на лазерно-индуцированной микроплазме с помощью цифровой камеры и спектрометра, направляют на управляющую ЭВМ, которая подает сигнал, сформированный на базе применения нейронной сети.
2. Способ по п. 1, отличающийся тем, что используется нейронная сеть машинного обучения с подкреплением.
3. Способ по п. 1, отличающийся тем, что частота излучения высокочастотной фемтосекундой лазерной системы более 500 кГц.
| Garmatina, A.A., Asadchikov, V.E., Buzmakov, A.V., et al., Microsoft Source of Characteristic X-Rays for Phase-Contrast Imaging Based on a Femtosecond Fiber Laser, Crystallogr | |||
| Приспособление для получения кинематографических стерео снимков | 1919 |
|
SU67A1 |
| Kai-Hsiu Liao и др., Generation of hard X-rays using an ultrafast fiber laser system, Optics Express, Vol | |||
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| Ветряный двигатель с боковым регулирующим рулем, устанавливаемым на самолетах для приведения в действие динамо | 1926 |
|
SU13942A1 |
