Изобретение относится к методам и средствам защиты космического аппарата (КА) от столкновения с опасными космическими объектами естественного или искусственного происхождения и увеличения сроков функционирования КА.
Известен способ изменения траектории опасного космического объекта (ОКО), рекомендованный к использованию при орбитальном полете КА для обеспечения защиты КА от потенциально ОКО таким образом, чтобы при выполнении действий, необходимых для реализации способа защиты, сохранить возможность применения КА для выполнения функциональных задач и продолжать его целевое использование [1].
Способ [1] выбран в качестве способа - прототипа заявленного изобретения. Он предусматривает, что в состав оборудования контролируемого КА включают малый космический аппарат (MICA) и средства радиолокации космического пространства, в орбитальном полете осуществляют радиолокацию окружающего пространства бортовыми средствами, обнаруживают в окружающем космическом пространстве вблизи КА космический объект, средствами радиолокации измеряют параметры относительного движения космического объекта, определяют параметры орбиты обнаруженного космического объекта по параметрам относительного движения объекта и параметрам орбиты КА, выявляют участок траектории и временной интервал полета, на котором возможно опасное сближение обнаруженного космического объекта и контролируемого КА, при наличии участка опасного сближения отделяют МКА от КА, выполняют орбитальное маневрирование МКА, сближение и захват обнаруженного опасного космического объекта, включают реактивную двигательную установку МКА, изменяют траекторию движения опасного объекта и таким образом обеспечивают защиту КА от столкновения с опасным космическим объектом.
Из описания предложенного способа следует, что способ [1] обеспечивает возможность упреждающего перехвата ОКО, а процесс реализация способа-прототипа не препятствует эксплуатации КА по функциональному назначению.
Недостатками способа-прототипа являются:
значительные затраты энергоресурсов КА при непрерывном радиолокационном зондировании космического пространства с целью обнаружения ОКО на большом расстоянии от КА и обеспечении относительно длительного временного интервала от момента обнаружения ОКО объекта до потенциально опасного сближения ОКО и КА за счет большого расстояния;
низкая вероятность захвата малым КА опасного объекта и изменения траектории ОКО при обнаружении опасного объекта вблизи КА, так как технические системы МКА инерционны, и в случае малого временного интервала от момента обнаружения до возможного сближения ОКО и КА, успешное выполнение совокупности действий способа-прототипа, обеспечивающих маневрирование МКА, сближение, захват и изменение траектории ОКО маловероятно.
Приоритетные технические задачи, на решение которой направлено заявленное изобретение, состоят в обеспечении защиты контролируемого КА от потенциально опасного объекта путем коррекции траектории ОКО таким образом, чтобы, во-первых, снизить затраты ресурсов КА при проведении обнаружения ОКО, во-вторых, повысить вероятность захвата малым КА опасного объекта и коррекции его траектории за счет увеличения длительности временного интервала от момента обнаружения объекта до прогнозируемого момента сближения контролируемого КА и ОКО.
Технический результат достигается путем использования технических средств и функциональных возможностей системы контроля космического пространства (СККП) и выполнения действий, совокупность которых способна обеспечить раннее обнаружение ОКО, движение которого угрожает контролируемому КА.
Описание эксплуатируемых и разрабатываемых СККП приведено в монографии [2, с. 22-34], а основные функции отечественной СККП на странице 24. Функционирование СККП обеспечивает:
обнаружение космических объектов и определение их орбит;
хранение и уточнение параметров орбит космических объектов;
прогнозирование движения космических объектов;
предсказание сближения и столкновения космических объектов.
Применение технических средств и возможностей СККП позволяет:
заранее выявить космических объект, прогнозируемое движение которого будет проходить вблизи контролируемого КА;
определить время опасного сближения объекта с КА;
рассчитать направление относительно контролируемого КА, в котором прогнозируется приближение ОКО к контролируемому КА.
Сущность настоящего изобретения состоит в установке на контролируемом КА малого космического аппарата и средств радиолокационного зондирования космического пространства, осуществлении в орбитальном полете радиолокационного зондирования космического пространства бортовыми средствами, измерении средствами радиолокационного зондирования параметров относительного движения космического объекта, определении параметров орбиты обнаруженного космического объекта по параметрам относительного движения объекта и орбиты КА, отделение малого космического аппарата от КА при наличии участка траектории на котором возможно опасное сближение, выполнении орбитального маневрирования малого космического аппарата, сближении и захвата обнаруженного космического объекта, включении реактивной двигательной установки малого космического аппарата, коррекции траектории движения опасного объекта и обеспечении защиты космического аппарата от столкновения с опасным космическим объектом, в котором согласно предложенному изобретению, средствами СККП осуществляется предварительное обнаружение опасного космического объекта путем обработки хранящихся параметров орбит космических объектов, передача данных о прогнозируемом участке опасного сближения на борт контролируемого КА, радиолокационное зондирование космического пространства импульсами повышенной мощности только в период прогнозируемого сближения с опасным объектом и только в направлении его приближения для уточнения параметров относительного движения опасного космического объекта.
Существенными признаками, характеризующими изобретение, и обеспечивающими получение технического результата являются:
применение технических средств и функциональных возможностей СККП для предварительного обнаружения опасного космического объекта.
выполнение следующей совокупности последовательных действий:
а) предварительное обнаружение опасного космического объекта путем прогнозирования движения космических объектов, параметры орбит которых определяют и хранят технические средства СККП, предсказание опасного сближения космического объекта и контролируемого КА;
б) передача на борт контролируемого КА данных о выявленном участке опасного сближения, параметрах орбиты ОКО, параметрах относительного движения, временном интервале и направлении приближения ОКО к контролируемому КА;
в) выполнение на борту контролируемого КА расчета мощности радиолокационных импульсов, излучение которых позволяет обнаружить приближающийся опасный объект на расстоянии, достаточном для выполнения необходимых защитных действий;
г) проведение радиолокационного зондирования космического пространства импульсами повышенной мощности только в интервале времени прогнозируемого сближения с опасным объектом, предварительно выявленного средствами СККП, и только в направлении ожидаемого приближения опасного объекта;
д) уточнение рассчитанных априори параметров относительного движения опасного космического объекта и контролируемого КА путем осуществления радиолокационного зондирования, выполняемого автономными радиолокационными средствами контролируемого КА;
е) выполнение действий по изменению с помощью малого КА траектории ОКО, предусмотренных способом-прототипом, включающих: расчет программы орбитального маневрирования МКА, обеспечивающей сближение с ОКО; передачу программы орбитального маневрирования в бортовую систему управления МКА; отделение МКА от КА; выполнение МКА орбитального маневрирования и сближения с ОКО; захват малым космическим аппаратом обнаруженного объекта; включение реактивной двигательной установки, находящейся на МКА, для коррекции траектории движения обнаруженного ОКО.
Из приведенной последовательности действий заявленного способа и способа-прототипа видно, что предложенный способ защиты не требует изменения порядка и программы работы эксплуатируемого КА, применяемого для выполнения целевых задач. Таким образом предложенный способ сохраняет основное достоинство способа-прототипа.
Предусмотренное заявленным способом применение импульсов повышенной мощности для радиолокации позволяет обнаружить и уточнить параметры орбиты опасного объекта на большем расстоянии, чем это предусмотрено способом-прототипом. Однако использование импульсов повышенной мощности не приводит к увеличению затрат энергоресурсов КА на суточном интервале полета, так как радиолокационное зондирование осуществляют в течении краткого времени и только в направлении ожидаемого приближения опасного объекта.
Использование средств СКК, а также направленное, кратковременное радиолокационное зондирование повышенной мощности, предусмотренное заявленным изобретением, по сравнению со способом-прототипом позволяют:
снизить затраты энергоресурсов КА, необходимые для радиолокационного сканирования космического пространства.
повысить вероятность захвата малым КА опасного объекта и коррекции орбиты ОКО за счет обнаружения ОКО и уточнения его орбиты на расстоянии достаточном для проведения последовательности необходимых защитных действий.
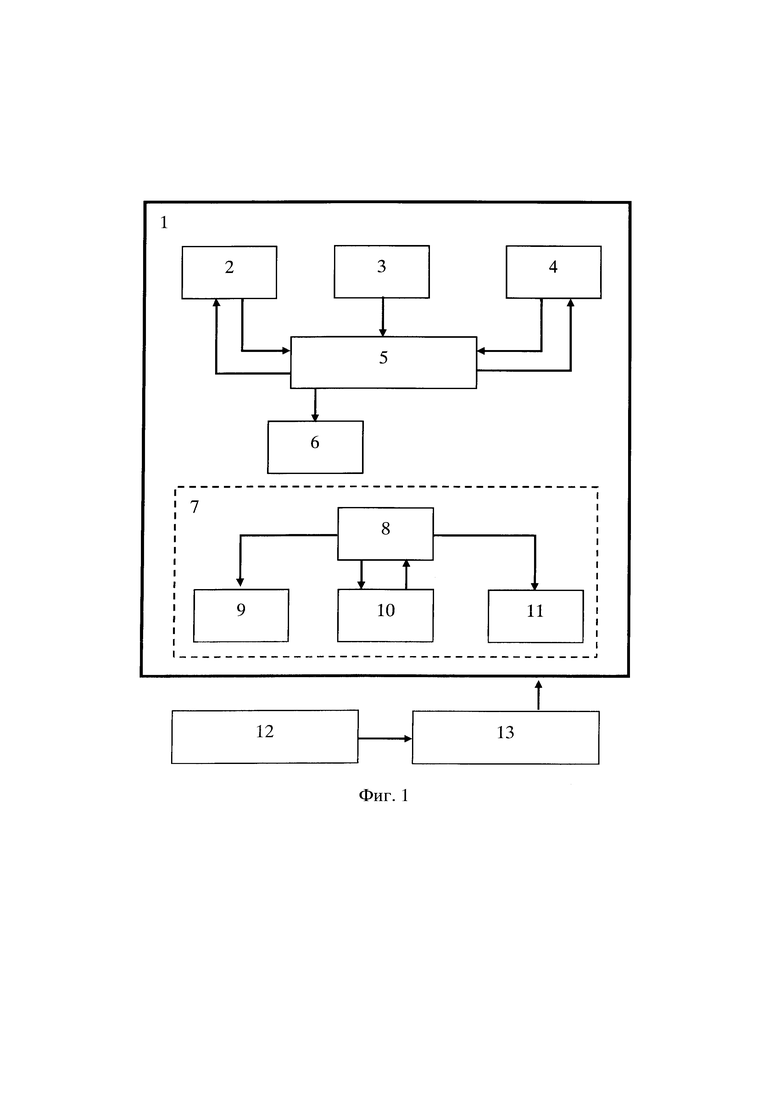
На чертеже представлена блок-схема устройства, реализующего предложенный способ. Космический аппарат 1 содержит средства радиолокационного зондирования окружающего космического пространства 2, навигационную аппаратуру потребителя (НАП) навигационной системы ГЛОНАСС 3, блок уточнения параметров орбиты опасного космического объекта, участка траектории и временного интервала полета, на котором возможно сближение ОКО и КА 4, бортовую цифровую вычислительную машину (БЦВМ) 5, устройство отделения МКА от КА 6, малый космический аппарат 7, который содержит БЦВМ 8, устройство орбитального маневрирования и сближения 9, устройство захвата обнаруженного объекта 10, двигательную установку 11. Блок-схема включает систему контроля космического пространства 12, средства передачи данных от СККП на борт КА 13.
Причем первый вход БЦВМ 5 соединен с выходом средств радиолокации 2, второй вход соединен с выходом НАП 3, третий вход соединен с выходом блока 4, первый выход БЦВМ 5 соединен со входом средств радиолокации 2, второй выход БЦВМ 5 соединен со входом устройства отделения 6, третий выход БЦВМ 5 соединен с первым входом БЦВМ 8, четвертый выход БЦВМ 5 соединен со входом блока 4, первый выход БЦВМ 8 соединен со входом устройство орбитального маневрирования 9, второй выход БЦВМ 8 соединен со входом устройства захвата 10, третий выход БЦВМ 8 соединен с двигательной установкой 11, второй вход БЦВМ 8 соединен с выходом устройства захвата 10, выход СККП 12 соединен со средствами передачи данных 13, которые соединены линией связи с КА 1.
Устройство работает следующим образом.
СККП осуществляет наблюдение за космическим пространством, определяет орбиты космических объектов, предварительно обнаруживает опасный космический объект, движение которых прогнозируется вблизи контролируемого КА. Средства 13 передают данные о параметрах сближения ОКО, поступающие от СККП, в бортовую аппаратуру КА 1.
БЦВМ 5 осуществляет расчет параметров радиолокационного зондирования по предварительным данным, поступившим от СККП. Средства радиолокации 2 осуществляют радиолокацию окружающего КА космического пространства в соответствии рассчитанными параметрами зондирования, измеряют и уточняют параметры относительного движения ОКО и передают результаты радиолокации в БЦВМ 5. БЦВМ 5 передает в блок 4, во-первых, уточненные параметры относительного движения обнаруженного объекта, включающие расстояние до объекта и скорость изменения расстояния, во-вторых, параметры орбиты КА, поступающие от НАП 3. В блоке 4 осуществляют, во-первых, определение орбиты опасного объекта, во-вторых, прогнозирование КА и объекта, в-третьих, уточнение участка траектории и временного интервала полета, на котором возможно опасное сближение обнаруженного ОКО и КА. При подтверждении участка опасного сближения, выявленного предварительно СККП, результатами радиолокационного зондирования из блока 4 передают в БЦВМ 5, во-первых, параметры орбиты обнаруженного объекта, во-вторых, временной интервал полета, на котором возможно опасное сближение обнаруженного объекта и КА. В БЦВМ 5 при получении из блока 4 данных об интервале полета, на котором возможно опасное сближение обнаруженного объекта и КА, рассчитывают программу орбитального маневрирования и сближения для МКА, передают программу в БЦВМ 8, затем передают от БЦВМ 5 в устройство 6 команду на отделение МКА от КА. После отделения малого космического аппарата БЦВМ 8 передает программу орбитального маневрирования в устройство 9, которое осуществляет маневрирование и сближение МКА с обнаруженным ОКО, а при соприкосновении МКА с объектом с помощью устройства 10 выполняют захват обнаруженного ОКО, затем передают сигнал о завершении захвата от устройства 10 в БЦВМ 8, которая после получения сигнала передает команду на включение двигательной установки 11. Работа двигательной установки 11 обеспечивает изменение траектории движения обнаруженного объекта, в результате которого обеспечивают коррекцию орбиты ОКО и уклонение защищаемого КА от столкновения с обнаруженным объектом.
Ключевые технические результаты, достигаемые заявленным изобретением, заключаются:
во-первых, в снижении затрат энергоресурсов КА, необходимых для проведения радиолокационного сканирования;
во-вторых, в повышении вероятности захвата малым КА опасного объекта за счет уточнения параметров его орбиты на расстоянии достаточном для проведения последовательности требуемых защитных действий.
Заявленное изобретение позволяет сохранить основное достоинство способа-прототипа, состоящее в возможности непрерывной эксплуатации контролируемого КА.
Из описанной последовательности действий, необходимой для осуществления способа, следует, что заявленный способ может быть использован для защиты КА от потенциально опасного объекта и многократно воспроизведен.
ЛИТЕРАТУРА
1. RU 2745378 от 24.03.2021 г.
2. Вениаминов С.С. Космический мусор - угроза человечеству. Второе издание. Механика, управление и информатика. - М.: ISSN 2075-6836, 2013. - 203 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ изменения траектории опасного космического объекта | 2019 |
|
RU2745378C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ ОБ ОПАСНЫХ СИТУАЦИЯХ В ОКОЛОЗЕМНОМ КОСМИЧЕСКОМ ПРОСТРАНСТВЕ И НА ЗЕМЛЕ И АВТОМАТИЗИРОВАННАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2570009C1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ВРЕМЕНИ СИЛЬНЫХ КОРОВЫХ ЗЕМЛЕТРЯСЕНИЙ СУШИ | 2009 |
|
RU2430388C2 |
| СПОСОБ ЗОНДИРОВАНИЯ СЕЙСМООРБИТАЛЬНЫХ ЭФФЕКТОВ И ВАРИАЦИЙ ПЛОТНОСТИ ВЕРХНЕЙ АТМОСФЕРЫ | 2019 |
|
RU2705161C1 |
| СПОСОБ ПОДГОТОВКИ К КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2022 |
|
RU2787603C1 |
| МЕЖДУНАРОДНАЯ АЭРОКОСМИЧЕСКАЯ СИСТЕМА ГЛОБАЛЬНОГО МОНИТОРИНГА (МАКСМ) | 2010 |
|
RU2465729C2 |
| СПОСОБ ПОДДЕРЖАНИЯ СОСТАВА ОРБИТАЛЬНОЙ ГРУППИРОВКИ АВТОМАТИЧЕСКИХ КОСМИЧЕСКИХ АППАРАТОВ | 2017 |
|
RU2666014C1 |
| МНОГОМОДУЛЬНЫЙ КОСМИЧЕСКИЙ АППАРАТ ДЛЯ ОЧИСТКИ ГЕОСТАЦИОНАРНОЙ ОРБИТЫ И СПОСОБ ОЧИСТКИ ГЕОСТАЦИОНАРНОЙ ОРБИТЫ | 2014 |
|
RU2573015C2 |
| МЕЖДУНАРОДНАЯ АЭРОКОСМИЧЕСКАЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА МОНИТОРИНГА ГЛОБАЛЬНЫХ ГЕОФИЗИЧЕСКИХ ЯВЛЕНИЙ И ПРОГНОЗИРОВАНИЯ ПРИРОДНЫХ И ТЕХНОГЕННЫХ КАТАСТРОФ (МАКАСМ) | 2007 |
|
RU2349513C2 |
| СПОСОБ ВЫПОЛНЕНИЯ МАНЕВРА УКЛОНЕНИЯ КОСМИЧЕСКОГО АППАРАТА ОТ СТОЛКНОВЕНИЯ НА ОРБИТЕ С ДРУГИМИ ТЕЛАМИ | 2015 |
|
RU2586920C1 |
Изобретение относится к методам и средствам защиты космического аппарата (КА) от столкновения с космическими объектами или средствами поражения. Способ коррекции траектории опасного космического объекта средствами системы контроля космического пространства осуществляют предварительное обнаружение опасного объекта. Далее передают на борт контролируемого КА данные о прогнозируемом участке опасного сближения, уточняют параметры относительного движения опасного космического объекта. Для коррекции траектории опасного космического объекта на КА размещают малый космический аппарат (МКА) и бортовые средства радиолокации космического пространства. Для уточнения параметров относительного движения объекта осуществляют радиолокацию космического пространства. При наличии участка опасного сближения отделяют МКА от КА, выполняют орбитальное маневрирование МКА, сближение и захват обнаруженного объекта. Далее включают реактивную двигательную установку МКА, изменяют траекторию движения опасного объекта и обеспечивают защиту КА от столкновения. Достигается снижение затрат энергоресурсов КА, необходимых для проведения радиолокационного сканирования, и повышение вероятности захвата малым КА опасного объекта. 1 ил.
Способ коррекции траектории опасного космического объекта заключающийся в установке на контролируемом КА малого космического аппарата и средств радиолокации космического пространства, осуществлении в орбитальном полете радиолокации окружающего пространства бортовыми средствами, измерении средствами радиолокации параметров относительного движения наблюдаемого космического объекта, определении параметров орбиты объекта по параметрам относительного движения объекта и орбиты КА, отделение малого космического аппарата от КА при наличии участка траектории на котором возможно опасное сближение, выполнении орбитального маневрирования малого космического аппарата, сближении и захвате обнаруженного космического объекта, включении реактивной двигательной установки малого космического аппарата, коррекции траектории движения опасного объекта и обеспечении защиты космического аппарата от столкновения с космическим объектом, отличающийся тем, что средствами системы контроля космического пространства осуществляют предварительное обнаружение опасного объекта путем обработки хранящихся в системе параметров орбит космических объектов, передают на борт контролируемого КА данные об прогнозируемом участке опасного сближения, осуществляют радиолокацию пространства импульсами повышенной мощности только в период прогнозируемого сближения с опасным объектом и только в направлении его приближения для уточнения параметров относительного движения опасного космического объекта.
| Способ изменения траектории опасного космического объекта | 2019 |
|
RU2745378C1 |
| СПОСОБ ОЧИСТКИ ОРБИТЫ МНОГОМОДУЛЬНЫМ КОСМИЧЕСКИМ КОМПЛЕКСОМ | 2020 |
|
RU2753393C1 |
| Космический комплекс очистки околоземного космического пространства от малогабаритного космического мусора | 2015 |
|
RU2612752C2 |
| CN 115140319 B, 27.12.2022 | |||
| PL 227360 B1, 05.06.2017 | |||
| СПОСОБ РАДИОЛОКАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2286585C2 |
