Изобретение относится к космической технике и может быть применено для реализации программ сведения с геостационарной орбиты (ГСО) вышедших из строя антропогенных объектов - космических аппаратов (КА), инспекции КА на ГСО, решения других задач, требующих контактного или неконтактного (информационного) взаимодействия с КА, находящимися на ГСО, а также, в ряде случаев, и на других орбитах.
Известны способы сближения двух автоматических космических аппаратов с целью сведения с орбиты одного из них и устройства для этой цели. Например, взаимодействие военного КА перехватчика «ИС» с КА-целью (см., например, «60 лет труда во имя мира». - М.: Оружие и технологии, 2004, С. 241-242). Способ заключается в выведении КА «ИС» на орбиту, близкую по своим параметрам (наклонению, долготе восходящего угла, аргументу перигея, высоте, эксцентриситету) к орбите КА-цели, в период, непосредственно предшествующий применению. В полете КА «ИС», совершая маневры по командам с наземных пунктов управления, переходит в область, близкую к расположению цели, обнаруживает ее с помощью бортовой радиолокационной головки самонаведения и автономно осуществляет конечное наведение. Недостатком способа и устройства на его основе являются большие затраты характеристической скорости для осуществления маневров по выходу в область расположения КА-цели (до 1/3 бортового запаса топлива КА «ИС») и, в этой связи, невозможность повторного маневра к другой цели.
Известны энергетически менее затратные устройства и способы сведения с орбиты нескольких КА путем взаимодействия с ними, в том числе на встречных курсах. Например, путем «выстреливания» неуправляемых снарядов с носителя космического базирования (система «Brilliant Pebbles», США; журнал Aviation Week&Space Technology, №13, август 2001). Недостатками системы являются отсутствие у снарядов системы самонаведения, что приводит к повышенному их расходу, необходимость нахождения носителя в непосредственной близости от сводимого КА; невозможность изменения целеуказания после запуска снарядов.
Ближайшим аналогом является американская противоспутниковая система GBI (см., например, справочник Jane′s STRATEGIC WEAPON SYSTEMS, январь 2004 г.), состоящая из ракеты-носителя и ступени перехвата - маневрирующего космического аппарата, оснащенного системой управления с оптической головкой самонаведения, двигательной установкой.
Ракета-носитель выводит маневрирующий КА в расчетную точку захвата оптической головкой самонаведения спутника-цели, в том числе на встречных курсах, после чего маневрирующий КА осуществляет маневр для сближения и сведения цели с орбиты (выведения цели из строя) за счет кинетической энергии соударения. По открытой информации такая система предназначалась для взаимодействия с КА, находящимися на низких и средних орбитах.
Недостатком способа - ближайшего аналога и устройства на его основе являются критичная зависимость результата работы маневрирующего КА от точности выхода ракеты-носителя в расчетную область расположения цели, невозможность изменения целеуказания после старта ракеты-носителя с Земли, невозможность применения такого аппарата по нескольким целям.
Целью предлагаемого изобретения является создание устройства космического аппарата для очистки геостационарной орбиты от антропогенных объектов за счет кинетической энергии соударения и способа очистки, характеризующихся возможностями гибкого изменения программы полета (выбора новой цели), сведения с орбиты нескольких космических аппаратов, пониженными затратами характеристической скорости для маневров.
Указанная цель достигается тем, что космический аппарат (КА) для очистки ГСО от антропогенных объектов, содержащий двигательную установку с запасами топлива, энергоустановку и систему управления с комплексом средств наблюдения и определения параметров движения сводимого с орбиты космического аппарата (СКА), выполнен многомодульным: на его борту размещено не менее одного модуля автономного маневрирования с двигательной установкой, системой управления, головкой самонаведения, полезной нагрузкой, с возможностью отделения модуля в заданный момент времени.
В соответствии со способом очистки геостационарной орбиты от антропогенных объектов, включающим запуск космического аппарата на дежурную орбиту, близкую по высоте к геостационарной орбите нахождения СКА, во встречном направлении по отношению к направлению движения СКА, производят запуск многомодульного космического аппарата (МКА), с наземного пункта управления передают МКА данные о координатах СКА и времени физического контакта с СКА, при прохождении МКА по дежурной орбите более одного витка с помощью аппаратуры МКА автономно находят заданный СКА и уточняют параметры его орбиты, рассчитывают параметры маневра для физического контакта с СКА, отделяют один из модулей автономного маневрирования для совершения маневра, физического контакта с СКА и сведения его с ГСО.
При наличии на ГСО нескольких аппаратов для сведения с орбиты последовательно таким же образом автономно отделяют от МКА для совершения маневра и физического контакта с ними и остальные модули автономного маневрирования.
Движение по орбите дежурства многомодульного космического аппарата до наступления полученного по командам с Земли времени совершения маневра осуществляют в режиме пониженного энергопотребления или временного перевода в нерабочее состояние не менее одной технической системы.
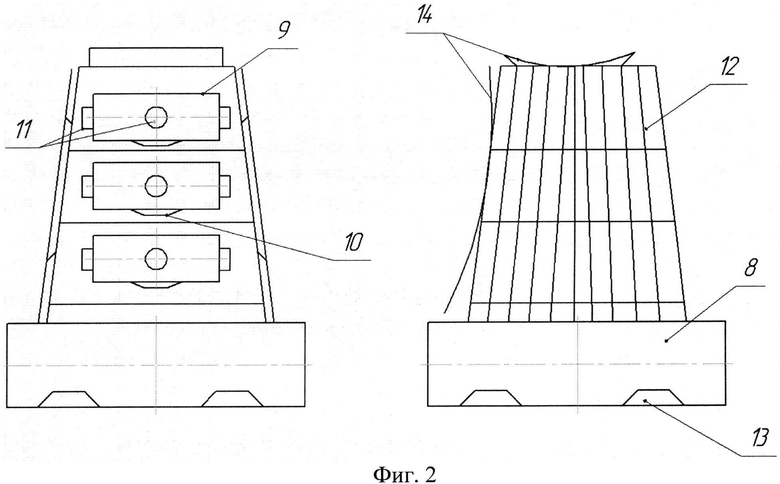
Схема полета МКА на дежурной орбите и сближения модуля автономного маневрирования с СКА приведена на фиг. 1 (на примере МКА и одного СКА). На фиг. 2 приведена схема МКА (в составе основного модуля, далее - базового блока, с модулями автономного маневрирования на борту; виды спереди и сбоку). Приняты обозначения:
1 - Земля;
2 - СКА (направление линейной скорости полета VСКА показано стрелкой);
3 - МКА (направление линейной скорости полета (показано стрелкой) в момент отделения одного модуля автономного маневрирования и придания модулю автономного маневрирования импульса ΔVМКА);
4 - дежурная орбита МКА;
5 - ГСО;
6 - переходная орбита полета модуля автономного маневрирования;
7 - МКА после отделения модуля автономного маневрирования;
8 - МКА, базовый блок;
9 - модуль автономного маневрирования;
10 - головка самонаведения модуля автономного маневрирования;
11 - двигательные установки модуля автономного маневрирования;
12 - энергоустановка МКА;
13 - двигательная установка МКА;
14 - бортовые средства наблюдения МКА за СКА.
Пусть наземным пунктом управления определен космический аппарат (поз. 2, фиг. 1) на геостационарной орбите (поз. 5, фиг. 1) Земли (поз. 1, фиг. 1) для сведения с нее (вариант - несколько СКА). Заблаговременно на дежурную орбиту, находящуюся в одной плоскости с ГСО, во встречном направлении полета, выводится многомодульный космический аппарат (поз. 3, фиг. 1). На фиг. 1 (поз. 4), как пример, показана дежурная круговая орбита меньшего радиуса в сравнении с ГСО. Двигаясь по виткам дежурной орбиты, МКА автономно определяет и поддерживает заданное наклонение и высоту относительно геостационарной орбиты (орбиты расположения СКА).
Во время нахождения МКА на дежурной орбите наземные станции управления определяют координаты предназначенного для сведения КА и передают их МКА; также передаются параметры времени (временного интервала) совершения маневра сведения СКА с геостационарной орбиты.
До получения такой информации системы МКА, не участвующие в информационном взаимодействии с наземными станциями управления или поддержании траектории МКА, могут быть временно отключены, часть систем может находиться в режиме пониженного энергопотребления (т.н. «спящий режим» МКА).
При получении вышеуказанной информации с Земли МКА автоматически рассчитывает время выхода из «спящего режима», выбирает модуль для совершения маневра сведения космического аппарата с ГСО. После выхода из «спящего режима» с использованием бортовых средств наблюдения МКА производит автономное определение СКА на геостационарной орбите, уточнение параметров его движения, расчет времени, направления и величины импульса тяги для маневра соответствующего модуля на ГСО и физического контакта с СКА.
В случае получения с наземных пунктов управления информации об изменении выбора сводимого с ГСО КА МКА производит перерасчет параметров маневра модуля автономного маневрирования.
После отделения от многомодульного космического аппарата, при необходимости повторного сближения с СКА либо сближения с другим СКА (заданным командами с базового блока МКА), модуль автономного маневрирования (поз. 9, фиг. 1) самостоятельно рассчитывает и совершает маневр временного ухода с геостационарной орбиты и обратный маневр в область расположения СКА.
После отделения и отлета всех модулей для сближения со сводимыми космическими аппаратами МКА (базовый блок) может остаться на дежурной орбите, осуществить сближение и контакт с выбранным СКА на ГСО; совершить маневр для перехода на орбиту захоронения или маневр схода с орбиты Земли.
Применение изобретения позволит снизить затраты ресурсов (топлива, ракет-носителей) на решение задачи очистки геостационарной орбиты (и, в ряде случаев, других орбит) от антропогенных объектов, вследствие использования принципов запуска космических аппаратов «навстречу» в той же плоскости; запуска «в связке» сразу нескольких КА для решения одной задачи, и, как следствие, повысить эффективность использования ракетно-космической техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОЧИСТКИ ОРБИТЫ МНОГОМОДУЛЬНЫМ КОСМИЧЕСКИМ КОМПЛЕКСОМ | 2020 |
|
RU2753393C1 |
| СПОСОБ УВОДА КОСМИЧЕСКОГО АППАРАТА, ЗАВЕРШИВШЕГО АКТИВНОЕ ФУНКЦИОНИРОВАНИЕ С ГЕОСТАЦИОНАРНОЙ ОРБИТЫ | 2023 |
|
RU2824862C1 |
| СПОСОБ УДАЛЕНИЯ С ГЕОСТАЦИОНАРНОЙ ОРБИТЫ НЕФУНКЦИОНИРУЮЩЕГО КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2559392C1 |
| СПОСОБ МОНИТОРИНГОВОЙ КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2019 |
|
RU2721812C1 |
| СПОСОБ БАЛЛИСТИЧЕСКОГО ОБЕСПЕЧЕНИЯ МОНИТОРИНГА КОСМИЧЕСКОГО АППАРАТА НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2022 |
|
RU2787796C1 |
| СПОСОБ ПОДДЕРЖАНИЯ СОСТАВА ОРБИТАЛЬНОЙ ГРУППИРОВКИ АВТОМАТИЧЕСКИХ КОСМИЧЕСКИХ АППАРАТОВ | 2017 |
|
RU2666014C1 |
| СПОСОБ ВЫВЕДЕНИЯ КОСМИЧЕСКОГО АППАРАТА С ГЕОПЕРЕХОДНОЙ ОРБИТЫ НА ГЕОСТАЦИОНАРНУЮ ОРБИТУ | 2009 |
|
RU2408506C1 |
| СПОСОБ КОЛЛОКАЦИИ ПРИ ПЕРЕВОДЕ ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА НА ДРУГУЮ ДОЛГОТУ СТОЯНИЯ И УВОДЕ ЕГО НА ОРБИТУ ЗАХОРОНЕНИЯ | 2022 |
|
RU2786680C1 |
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2019 |
|
RU2721813C1 |
| СПОСОБ МОНИТОРИНГОВОЙ КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2013 |
|
RU2558959C2 |
Изобретение относится к космической технике и может быть применено для реализации программ сведения с геостационарной орбиты (ГСО) вышедших из строя космических аппаратов (КА). Многомодульный космический аппарат (МКА) для очистки геостационарной орбиты от антропогенных объектов содержит двигательную установку с запасами топлива, энергоустановку и систему управления с комплексом средств наблюдения и определения параметров движения сводимого с орбиты космического аппарата (СКА). На борту МКА размещено не менее одного модуля автономного маневрирования с двигательной установкой, системой управления, головкой самонаведения, полезной нагрузкой, с возможностью отделения модуля в заданный момент времени. Способ очистки геостационарной орбиты от антропогенных объектов включает запуск МКА на дежурную орбиту, близкую по высоте к ГСО нахождения СКА, во встречном направлении по отношению к направлению движения СКА. Техническим результатом изобретения является снижение затрат ресурсов (топлива, ракет-носителей) на решение задачи очистки геостационарной орбиты от антропогенных объектов. 2 н. и 1 з.п. ф-лы, 2 ил.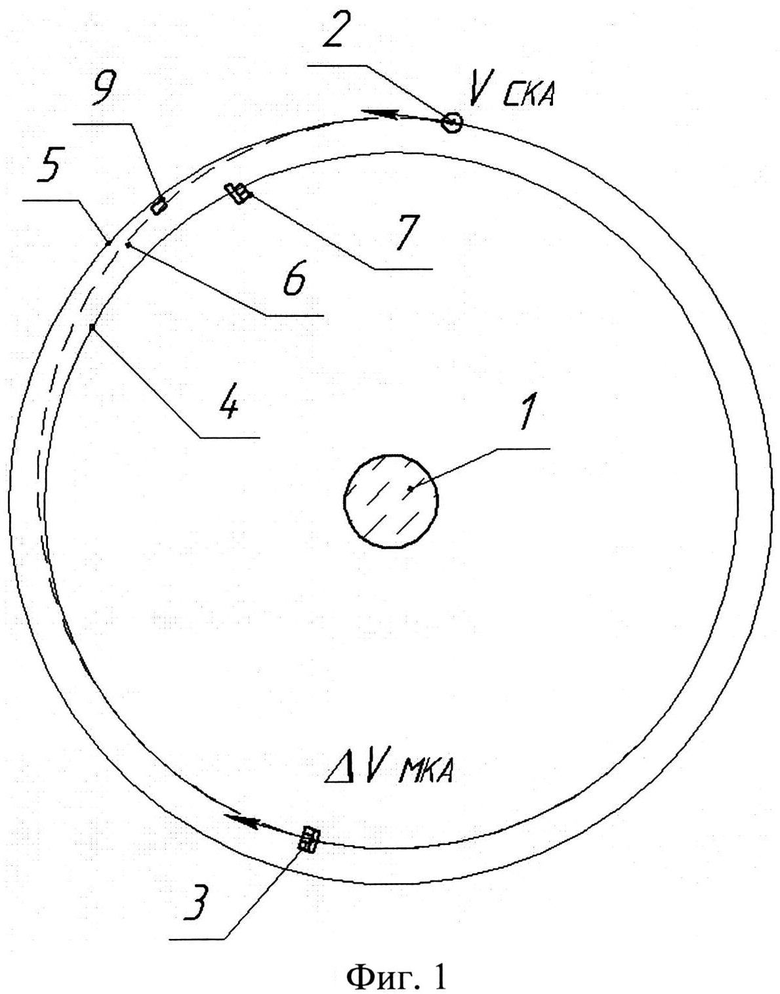
1. Космический аппарат (КА) для очистки геостационарной орбиты (ГСО) от антропогенных объектов, содержащий двигательную установку с запасами топлива, энергоустановку и систему управления с комплексом средств наблюдения и определения параметров движения сводимого с орбиты космического аппарата (СКА), отличающийся тем, что на его борту размещено не менее одного модуля автономного маневрирования с двигательной установкой, системой управления, головкой самонаведения, полезной нагрузкой, с возможностью отделения модуля в заданный момент времени.
2. Способ очистки геостационарной орбиты от антропогенных объектов, включающий запуск КА на дежурную орбиту, близкую по высоте к геостационарной орбите нахождения СКА, во встречном направлении по отношению к направлению движения СКА, отличающийся тем, что производят запуск многомодульного космического аппарата (МКА), с наземного пункта управления передают МКА данные о координатах СКА и времени физического контакта с СКА, при прохождении МКА по дежурной орбите более одного витка с помощью аппаратуры МКА автономно находят заданный СКА и уточняют параметры его орбиты, рассчитывают параметры маневра для физического контакта с СКА, отделяют один из модулей автономного маневрирования для совершения маневра, физического контакта с СКА и сведения его с ГСО.
3. Способ очистки геостационарной орбиты от антропогенных объектов по п. 2, отличающийся тем, что движение по орбите дежурства многомодульного космического аппарата до наступления полученного по командам с Земли времени совершения маневра осуществляют в режиме пониженного энергопотребления или временного перевода в нерабочее состояние не менее одной технической системы.
| КОСМИЧЕСКИЙ АППАРАТ ДЛЯ ОЧИСТКИ КОСМОСА ОТ ПАССИВНЫХ КА И ИХ ФРАГМЕНТОВ | 1998 |
|
RU2141436C1 |
| УПРАВЛЯЕМАЯ РАКЕТА АЭРОДИНАМИЧЕСКОЙ СХЕМЫ "УТКА" | 1991 |
|
RU2064655C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ АКТИВНОГО КОСМИЧЕСКОГО ОБЪЕКТА, СТЫКУЕМОГО С ПАССИВНЫМ КОСМИЧЕСКИМ ОБЪЕКТОМ | 2012 |
|
RU2490181C1 |
| JP 2010018053 A, 28.01.2010 | |||
| JP 2010069973 A, 02.04.2010. | |||

