Изобретение относится к области измерительной техники и может быть использовано в различных областях промышленности в качестве источника электропитания, в частности для определения параметров вращения вала: углового положения, скорости и направления вращения вала.
Из патента РФ № 2455617 (опубл. 10.07.2012) известно энергонезависимое устройство для определения движения и/или положении объекта. Устройство содержит катушку с магнитопроводом и магнитную пару, в которой полюса магнитов ориентированы в противоположные стороны относительно друг друга. Магниты расположены один за другим и выполняют движение относительно катушки. Магнитропровод закреплен на оси, установленной в пазах катушки, таким образом, что ось проходит сквозь отверстие, расположенное на одном конце магнитопровода, а противоположный конец магнитопровода свободен и способен отклоняться, совершая колебательное движение, создавая импульсы напряжения при пересечении магнитной оси магнитной пары.
К недостатку устройства относится относительно небольшая величина формируемого напряжения. При этом, в устройстве не предусмотрено формирование разных величин напряжений.
Из патента РФ № 2488122 (опубл. 20.07.2013) известен датчик скорости вращения и положения ротора. Датчик содержит статор, внутри которого соосно на подшипнике установлен ротор с постоянными магнитами. Статор выполнен в виде кольцевого магнитопровода с двумя кольцевыми полуобмотками. Магнитный ротор выполнен явнополюсным с одной парой полюсов.
В датчике предусмотрено получение разных величин напряжений на выходе. Однако величина этих напряжений невелика. Это обусловлено тем, что величина формируемого напряжения зависит от скорости движения магнитов мимо катушек. И непрерывное (плавное) движение магнитов относительно полуобмоток не позволяет значительно увеличить создаваемую в полуобмотках ЭДС.
Из патента РФ № 55991 (опубл. 27.08.2006) известен энергонезависимый датчик углового положения вала. Датчик содержит корпус с крышкой, в которых на подшипниках установлен вращающийся вал. На валу установлены ротор и статор с обмоткой возбуждения. Вал и ротор снабжены многополюсными магнитными кольцами, постоянные магниты которых находятся в зацеплении и образуют магнитную муфту.
Ротор дополнительно снабжен многополюсной магнитной системой, внутри которой концентрически расположен статор. Многополюсная магнитная система ротора, магнитопровод статора и обмотки возбуждения статора образуют генератор с возбуждением от постоянных магнитов. Напряжение, снимаемое с обмотки статора, поступает на электронную схему печатной платы.
Недостатком датчика является относительно небольшая величина напряжения, формируемого генератором. Это обусловлено тем, что магнитная муфта не участвует в создании рабочего магнитного потока, что снижает величину ЭДС генератора. При этом выходное напряжение имеет одну определенную величину. В результате, генератор снабжает питанием только маломощные элементы электронной схемы. В целом это снижает эффективность датчика и ограничивает его функциональные возможности.
Другим недостатком является сложная конструкция датчика. Это обусловлено наличием дополнительной магнитной системы ротора, сложной чашечной формой магнитопровода;
наличием собственного корпуса с крышкой и собственного вала; необходимостью установки вала в корпусе и крышке на подшипниках.
Кроме того, статор и магнитная муфта расположены последовательно на оси датчика, что увеличивает осевой размер датчика.
Технической задачей изобретения является устранение вышеуказанных недостатков аналогов.
Технический результат – повышение эффективности и расширение возможностей датчика.
Техническая задача решается и технический результат достигается за счет того, что энергонезависимый датчик углового положения вала содержит:
- ротор, включающий в себя магнитопровод, внутреннюю и внешнюю полумуфты-индукторы, выполненные в виде многополюсных магнитных колец;
- статор, включающий в себя магнитопровод и обмотки возбуждения;
- обмотки возбуждения размещены на радиально установленных сердечниках статора;
- ротор расположен коаксиально внутри статора;
- ротор и статор выполнены в виде генератора с возбуждением от постоянных магнитов, включающего в себя магнитопровод ротора, постоянные магниты внутренней и внешней полумуфт-индукторов, магнитопровод статора и обмотки возбуждения;
- печатную плату с электронной схемой;
- магниточувствительные элементы, выполненные с возможностью измерения параметров магнитного поля постоянных магнитов, вращающихся совместно с контролируемым валом.
Кроме того, количество обмоток возбуждения может составлять от одной до восьми.
Кроме того, обмотки возбуждения гальванически развязаны и выполнены с возможностью формирования напряжения разной величины.
Кроме того, обмотки возбуждения выполнены с разными параметрами.
Кроме того, статор снабжен вспомогательными сердечниками, расположенными между сердечниками с обмотками возбуждения.
Кроме того, обмотка возбуждения содержит катушки, соединенные последовательно, для кратного увеличения формируемого напряжения.
Кроме того, по меньшей мере одна обмотка возбуждения соединена с электронной схемой печатной платы датчика положения.
Кроме того, по меньшей мере одна обмотка возбуждения соединена с электрическими элементами внешней цепи.
Кроме того, магниты, вращающиеся совместно с контролируемым валом, выполнены в виде по меньшей мере одной пары постоянных магнитов разной полярности и закреплены с внутренней стороны магнитопровода ротора.
Кроме того, магниточувствительные элементы установлены на печатной плате, закрепленной со статором.
Сущность предлагаемого датчика поясняют графические материалы:
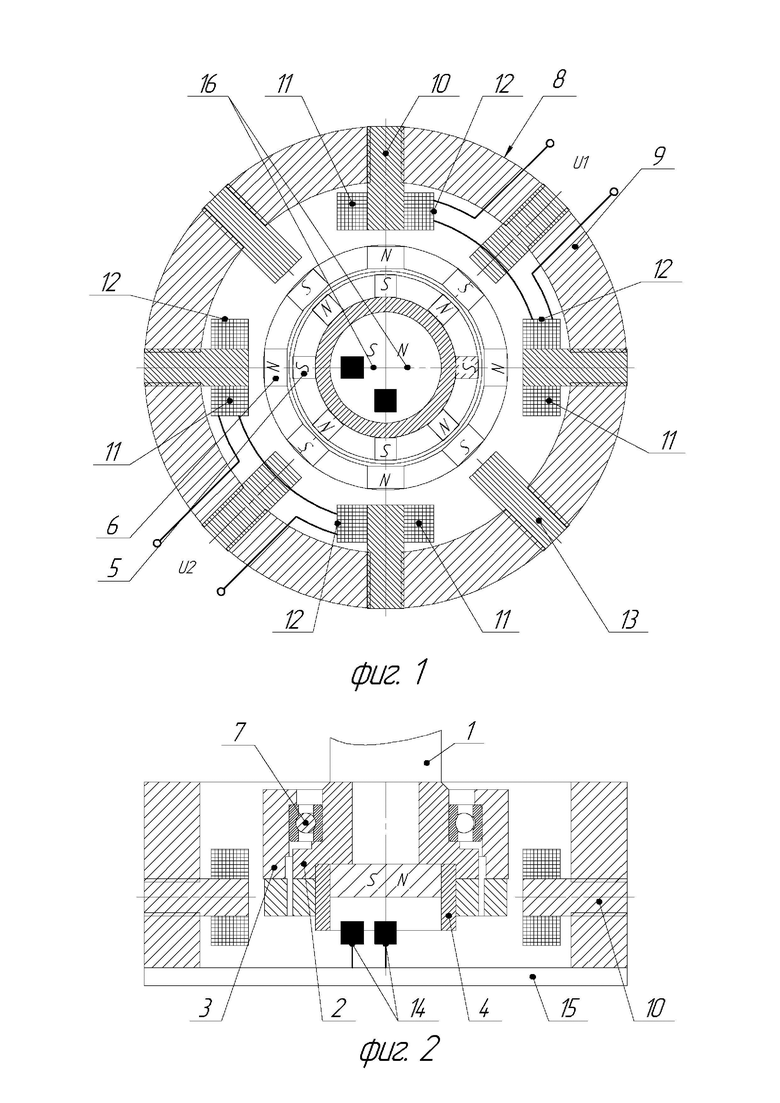
На фиг. 1 показано конкретное исполнение датчика в поперечном разрезе. На фиг. 2 показан продольный разрез датчика на фиг. 1.
Нижеуказанными позициями обозначены следующие элементы:
1 – вал; 2 – внутренняя полумуфта-индуктор; 3 – внешняя полумуфта-индуктор; 4 – магнитопровод ротора; 5 – постоянные магниты внутренней полумуфты-индуктора; 6 – постоянные магниты внешней полумуфты-индуктора; 7 – подшипник; 8 – статор; 9 – ярмо статора; 10 – сердечники; 11 – обмотки возбуждения; 12 – катушки обмоток возбуждения, 13 – вспомогательные сердечники; 14 – магниточувствительные элементы; 15 – печатная плата датчика положения; 16 – постоянные магниты.
Датчик углового положения вала 1 содержит ротор, включающий в себя внутреннюю полумуфту-индуктор 2, внешнюю полумуфту-индуктор 3, выполненные в виде многополюсных магнитных колец, и магнитопровод 4. Внутренняя полумуфта-индуктор 2
находится в магнитном зацеплении с внешней полумуфтой-индуктором 3 посредством постоянных магнитов 5 внутренней полумуфты-индуктора 2 и постоянных магнитов 6 внешней полумуфты-индуктора 3, образующих магнитную муфту, работающую за счет сил магнитного взаимодействия – притяжения и отталкивания магнитов 5 и 6. Внутренняя полумуфта-индуктор 2 соединена с внешней полумуфтой-индуктором 3 через подшипник 7. Внутренняя полумуфта-индуктор 2 и магнитопровод 4 ротора закреплены на контролируемом приводном валу 1, в качестве которого может быть использован вал электродвигателя. Приводной вал 1 не входит в состав конструкции датчика.
Для определения параметров вращения вала 1 датчик снабжен магниточувствительными элементами 14, выполненными с возможностью измерения параметров магнитного поля магнитов 16, вращающихся совместно с контролируемым валом 1. Магниты 16 выполнены в виде по меньшей мере одной пары постоянных магнитов разной полярности и закреплены с внутренней стороны магнитопровода 4 ротора. Магниточувствительные элементы 14 установлены на печатной плате 15, которая закреплена на статоре 8. В качестве магниточувствительных элементов 14 могут быть использованы датчики Холла или магниторезисторы.
Ротор расположен концентрически внутри статора 8.
Статор 8 содержит магнитопровод, включающий в себя ярмо 9 и радиально установленные сердечники 10, и обмотки возбуждения 11. Количество обмоток 11 может составлять от одной до восьми. Обмотки возбуждения 11 расположены на сердечниках 10, в кольцевом пространстве между ярмом 9 статора и внешней полумуфтой-индуктором 3 ротора.
В случае исполнения статора 8 с одной обмоткой возбуждения 11, обмотка 11 рассчитана на питание элементов электронной схемы датчика.
В случае исполнения статора 8 с двумя и более обмотками возбуждения 11, обмотки 11 могут быть гальванически развязаны и изготовлены с разными параметрами (сопротивлениями и числом витков), для формирования напряжения разной величины. Например, одна из обмоток 11 рассчитана на питание элементов электронной схемы датчика, а другие – на питание более мощных электрических элементов привода.
При этом электропитание элементов может осуществляться постоянным током, через выпрямитель, или переменным током. Электрические элементы привода не входят в состав заявляемого датчика.
Для кратного увеличения выходного напряжения каждая обмотка возбуждения 11 может содержать две и более последовательно соединенные катушки 12. Каждая из катушек 12 расположена на сердечнике 10. В конкретном исполнении на фиг. 1 каждая из двух обмоток 11 содержит по две последовательно соединенные катушки 12, что обеспечивает удвоение величины выходных напряжений (U1 и U2), без увеличения габаритных размеров датчика. Конкретное исполнение с последовательным соединением, например, трех одинаковых катушек 12, обеспечит троекратное увеличение напряжения данной обмотки 11.
Для укорочения магнитной цепи статор 8 может быть снабжен вспомогательными сердечниками 13, расположенными радиально между сердечниками 10 (см.фиг.1).
Датчик работает следующим образом.
В исходном положении полюсы магнитов 5 внутренней полумуфты-индуктора притянуты к полюсам магнитов 6 внешней полумуфты-индуктора, а полюсы магнитов 6 притянуты к сердечникам 10 статора.
При вращении приводного вала 1 вращается закрепленная с валом 1 внутренняя полумуфта-индуктор 2. Внешняя полумуфта-индуктор 3 сначала вращается совместно с внутренней полумуфтой-индуктором 2 за счет того, что силы притяжения разноименных магнитов 5 и 6 превышают силы притяжения магнитов 6 и сердечников 10. При этом магнитный поток проходит по магнитной цепи импульсного генератора последовательно через магнит 5, магнит 6, сердечник 10, ярмо 9, вспомогательный сердечник 13, магнит 6, магнит 5, магнитопровод 4 ротора, магнит 5. Затем одноименные полюсы магнитов 5 и 6 начинают приближаться друг к другу, что приводит к возникновению между ними сил отталкивания. Когда силы отталкивания магнитов 5 и 6 превысят силы притяжения магнитов 6 и сердечников 10 статора, происходит резкое перемещение (скачок) магнитов 6 относительно сердечников 10 статора, и к каждому сердечнику 10 статора становится притянутым соседний с исходным одноименный полюс магнита 6.
В момент перескока магнитов 6 относительно сердечников 10 статора в генераторе резко изменяется направление магнитного потока, в том числе потока, проходящего через витки обмоток 11, что вызывает создание ЭДС в обмотках 11, и в соответствии с законом электромагнитной индукции, в обмотках 11 индуцируется ток при изменении пересекающего их витки магнитного потока. Далее аналогичным образом происходит очередной перескок, и процесс формирования ЭДС повторяется.
В конкретном исполнении статора 8 с двумя обмотками возбуждения 11, напряжение (U1), снимаемое с первой обмотки 11, поступает на электронную схему печатной платы 15 датчика положения и обеспечивает питание электронной схемы импульсным напряжением. Напряжение другой величины (U2), снимаемое со второй обмотки 11, через выпрямитель и сглаживающий конденсатор поступает на электрические элементы привода и обеспечивает их питание постоянным током.
Сила и размеры магнитов 5 и 6 и обмоточные данные обмоток 11 рассчитаны таким образом, чтобы была возможность свободного хода внутренней и внешней полумуфт-индукторов 2 и 3 друг относительно друга, и чтобы одного перескока было достаточно для питания электронной схемы датчика и электрических элементов привода, в котором установлен датчик.
Магниточувствительные элементы 14 измеряют параметры магнитного поля магнитов 16, вращающихся совместно с валом 1, и выдают сигнал на электронную схему печатной платы 15 датчика положения, для обработки и вычисления информации об угловом положении, скорости и направлении вращения контролируемого вала 1.
Таким образом, предложенный датчик обеспечивает:
- повышение величины ЭДС генератора за счет того, что магнитная муфта и статор совместно участвуют в создании рабочего магнитного потока;
- возможность кратного увеличения напряжений на выходе генератора без увеличения габаритов датчика;
- уменьшение осевого размера за счет коаксиального расположения магнитной муфты и статора;
- возможность электропитания нагрузок разной мощности напряжениями разной величины и вида;
- повышение надежности за счет простой конструкции с малым количеством простых в изготовлении деталей;
- компактное размещение датчика в электроприводах, в том числе в приводах с ограниченными габаритными размерами.
В целом вышеуказанное повышает эффективность и расширяет возможности датчика.
| название | год | авторы | номер документа |
|---|---|---|---|
| Энергонезависимый датчик углового положения вала | 2024 |
|
RU2828613C1 |
| Торцовый электродвигатель постоянного тока | 1987 |
|
SU1511819A1 |
| АКСИАЛЬНЫЙ УПРАВЛЯЕМЫЙ БЕСКОНТАКТНЫЙ ДВИГАТЕЛЬ-ГЕНЕРАТОР | 2015 |
|
RU2601952C1 |
| УНИВЕРСАЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА БЕЛАШОВА | 1996 |
|
RU2096898C1 |
| АКСИАЛЬНЫЙ БЕСКОНТАКТНЫЙ ДВИГАТЕЛЬ-ГЕНЕРАТОР | 2013 |
|
RU2529210C1 |
| Синхронный электрический генератор с многополюсной комбинированной магнитной системой с постоянными магнитами | 2019 |
|
RU2709788C1 |
| ТРЁХВХОДОВАЯ АКСИАЛЬНАЯ ГЕНЕРАТОРНАЯ УСТАНОВКА | 2015 |
|
RU2589730C1 |
| БЕСКОНТАКТНЫЙ ДАТЧИК СКОРОСТИ ВРАЩЕНИЯ И ПОЛОЖЕНИЯ РОТОРА | 2012 |
|
RU2488122C1 |
| БЕСКОНТАКТНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2008 |
|
RU2380814C1 |
| МАГНИТНАЯ МУФТА СЦЕПЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1999 |
|
RU2158384C1 |
Изобретение относится к области измерительной техники. Технический результат – повышение эффективности и расширение возможностей датчика. Энергонезависимый датчик углового положения вала содержит ротор, включающий в себя магнитопровод, внутреннюю и внешнюю полумуфты-индукторы, выполненные в виде многополюсных магнитных колец; статор, включающий в себя магнитопровод и обмотки возбуждения, размещенные на радиально установленных сердечниках статора; ротор расположен коаксиально внутри статора; ротор и статор выполнены в виде генератора с возбуждением от постоянных магнитов, включающего в себя магнитопровод ротора, постоянные магниты внутренней и внешней полумуфт-индукторов, магнитопровод статора и обмотки возбуждения; печатную плату с электронной схемой; магниточувствительные элементы, выполненные с возможностью измерения параметров магнитного поля постоянных магнитов, вращающихся совместно с контролируемым валом. 9 з.п. ф-лы, 2 ил.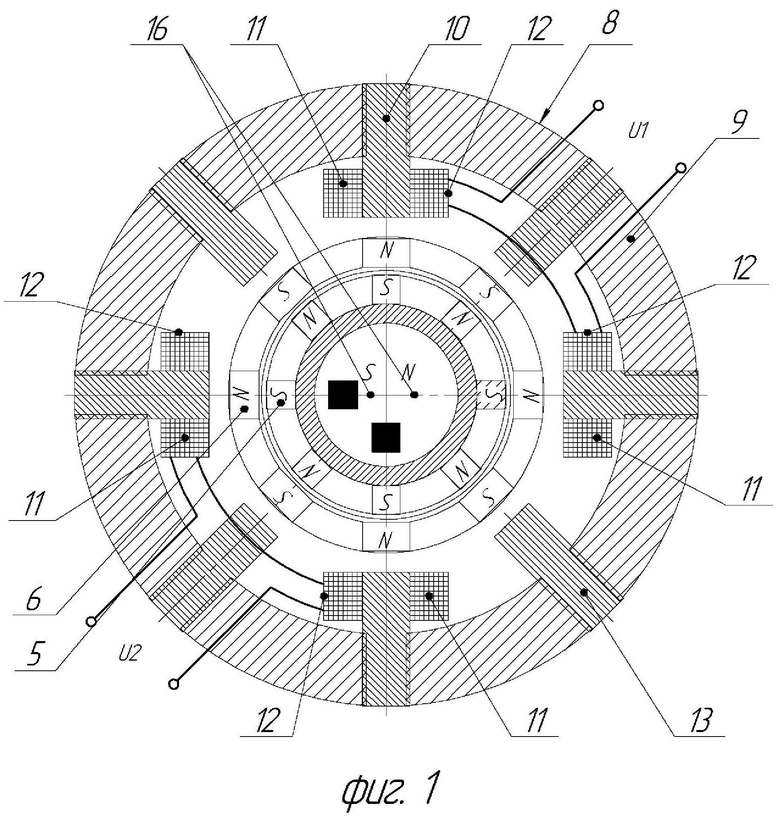
1. Энергонезависимый датчик углового положения вала, содержащий:
- ротор, включающий в себя магнитопровод, внутреннюю и внешнюю полумуфты-индукторы, выполненные в виде многополюсных магнитных колец;
- статор, включающий в себя магнитопровод и обмотки возбуждения;
- обмотки возбуждения размещены на радиально установленных сердечниках статора;
- ротор расположен коаксиально внутри статора;
- ротор и статор выполнены в виде генератора с возбуждением от постоянных магнитов, включающего в себя магнитопровод ротора, постоянные магниты внутренней и внешней полумуфт-индукторов, магнитопровод статора и обмотки возбуждения;
- печатную плату с электронной схемой;
- магниточувствительные элементы, выполненные с возможностью измерения параметров магнитного поля постоянных магнитов, вращающихся совместно с контролируемым валом.
2. Датчик по п. 1, отличающийся тем, что количество обмоток возбуждения может составлять от одной до восьми.
3. Датчик по п. 1, отличающийся тем, что обмотки возбуждения гальванически развязаны и выполнены с возможностью формирования напряжения разной величины.
4. Датчик по п. 1, отличающийся тем, что обмотки возбуждения выполнены с разными параметрами.
5. Датчик по п. 1, отличающийся тем, что статор снабжен вспомогательными сердечниками, расположенными между сердечниками с обмотками возбуждения.
6. Датчик по п. 1, отличающийся тем, что обмотка возбуждения содержит катушки, соединенные последовательно, для кратного увеличения формируемого напряжения.
7. Датчик по п. 1, отличающийся тем, что по меньшей мере одна обмотка возбуждения соединена с электронной схемой печатной платы датчика положения.
8. Датчик по п. 1, отличающийся тем, что по меньшей мере одна обмотка возбуждения соединена с электрическими элементами внешней цепи.
9. Датчик по п. 1, отличающийся тем, что магниты, вращающиеся совместно с контролируемым валом, выполнены в виде по меньшей мере одной пары постоянных магнитов разной полярности и закреплены с внутренней стороны магнитопровода ротора.
10. Датчик по п. 1, отличающийся тем, что магниточувствительные элементы установлены на печатной плате, закрепленной со статором.
| Устройство для алгебраического суммирования углов поворота осей с неограниченным вращением | 1937 |
|
SU55991A1 |
| US 6084400 A, 04.07.2000 | |||
| УСТРОЙСТВО ДЛЯ ХОНИНГОВАНИЯ ЦИЛИНДРИЧЕСКОЙ ПОВЕРХНОСТИ | 0 |
|
SU178708A1 |
| Индуктивный датчик угловых перемещений | 1978 |
|
SU765944A1 |

