Область техники, к которой относится изобретение
Изобретение относится к магнитным устройствам, в том числе к устройству магнитного подвеса левитационных транспортных средств, в частности, к гибридным электромагнитам для системы маглев.
Уровень техники
Для перевозки людей или грузов с применением магнитной левитации предложено несколько типов подвесов, при которых транспортное средство без механического контакта с путепроводом (путевой структурой) удерживается с помощью пондеромоторных сил («магнитная подушка»), генерируемых электромагнитами или постоянными магнитами. Тяговый линейный двигатель может разгонять транспортное средство на магнитном подвесе до скоростей, существенно превышающих скорости движения обычного транспорта.
Рассматривается тип магнитного подвеса для магнитолевитационного транспортного средства (ТС), классифицируемый как электромагнитный подвес (ЭМП). Принцип работы ЭМП основан на притягивании электромагнита (ЭМ) или постоянного магнита (ПМ) к ферромагнетикам. В ЭМП транспортного средства ЭМ и ПМ притягиваются к ферромагнитной направляющей, расположенной на путевой структуре. При этом между ферромагнитной направляющей и магнитами ЭМП удерживается левитационный зазор. При левитации вес ТС уравновешен магнитной силой ЭМП. Такое равновесие принципиально неустойчиво и для его сохранения требуется постоянный активный контроль за величиной левитационного (воздушного) зазора, стабилизация которого обеспечивается с помощью управления величиной тока ЭМ по специальному алгоритму.
Протекание рабочего тока по проводнику электромагнита сопровождается выделением тепла, т.е. требует энергозатрат и охлаждения. Эти затраты растут с увеличением тока, т.е. с увеличением подъемной силы ЭМП. Для снижения энергопотребления (повышения энергоэффективности) обычного ЭМП (только ЭМ без ПМ) применяют комбинированный электромагнитный подвес (КЭМП), в котором дополнительно к ЭМ устанавливают ПМ. При сохранении веса ТС на исходном уровне сила притяжения ПМ к ферромагнитной направляющей путепровода позволяет на соответствующую величину уменьшить силу генерируемую ЭМ (т.е. уменьшить ток ЭМ), снизив тем самым энергопотребление ЭМ. В случае сохранения силы притяжения ЭМ (сохраняя прежним ток в ЭМ) применение ПМ позволяет без дополнительных энергозатрат увеличить вес ТС. Изменение веса ТС при сохранении величины левитационного зазора можно компенсировать изменением величины силы притяжения ПМ к ферромагнитной направляющей, как например, в патенте комбинированного ЭМП RU2611858. Для стабилизации левитационного зазора в патенте RU2611858 используется пара ЭМ, располагаемых снизу и сверху ферромагнитной направляющей.
ЭМП в обычном (только ЭМ) и комбинированном (ЭМ и ПМ) исполнении обеспечивает выполнение двух функций: (1) собственно подвешивание, т.е. создание магнитной силы притяжения к ферромагнитной направляющей, уравновешивающей при заданном воздушном зазоре вес ТС (путем задания определенной величины рабочего тока в ЭМ), и (2) активная стабилизация величины зазора. Обе функции выполняются с помощью управления величиной тока в ЭМ по специальному алгоритму. Управление ведется таким образом, что среднее значение управляющего тока при выбранном рабочем зазоре обеспечивает величину подвешивающей силы ЭМП равной весу ТС, а соответствующие малые аддитивные вариации управляющего тока (относительно среднего значения) обеспечивают стабильность величины зазора.
Величина среднего значения тока в обычном ЭМП значительно больше (на 1-2 порядка величины) средней амплитуды вариации тока. Именно величина среднего значения тока и определяет высокое энергопотребление обычного ЭМП. В комбинированном ЭМП (например, в RU2611858), левитация может быть осуществлена при среднем значении тока сопоставимом по величине со средней амплитудой вариации тока, т.е. при значительно меньшем энергопотреблении.
Более 20 лет назад были предложены схемы электромагнитов, в магнитную цепь которых разными способами вставлялись ПМ. Такие магниты получили название гибридных электромагнитов (ГЭМ), а соответствующие подвесы - гибридных ЭМП (ГЭМП). В применении ГЭМП для транспортных средств можно ожидать получение ряда существенных потребительских преимуществ перед КЭМП, таких как компактность (лучшие весогабаритные характеристики), более низкое энергопотребление и др. Кроме этого, в сравнение с традиционными электромагнитными подвесами, гибридные электромагнитные подвесы оказались меньше и легче.
Неплохими потребительскими свойствами обладает конструкция гибридного электромагнита с компоновкой магнитопровода, ЭМ и ПМ, описанная в публикации Safaei, Suratgar, Afshar, and Mirsalim, 2015. F. Safaei, A.A. Suratgar, A. Afshar, and M. Mirsalim. Characteristics Optimization of the Maglev Train Hybrid Suspension System Using Genetic Algorithm. Energy Conversion, IEEE Transactions on, PP(99), 1_8, 2015, и представляющая собой двухполюсный ГЭМ.
Авторы данной конструкции предложили физически обоснованное решение конфигурации ЭМ и ПМ, встроенных в общую магнитную цепь для получения максимальной силы при минимальном расходе магнитного материала и с возможностью эффективного управления величиной силы. По итогам выполненной нами оптимизации такой конструкции, получена типовая конфигурация с ПМ, толщина которого сопоставима с величиной воздушного зазора, а площадь поверхности значительно превышает площадь полюса.
К недостаткам конфигурации, описанной в указанной статье, следует отнести:
- Значительный уровень магнитной индукции вне его рабочей поверхности (поверхность ферромагнитных полюсов ГЭМ обращенная в сторону ферро-магнитной направляющей между которыми существует воздушный зазор). Это представляет серьезную угрозу с точки зрения возможности налипания посторонних магнитных предметов и усложняет техническое обслуживание;
- Большие поля рассеяния в окружающем пространстве в отсутствие ферро-магнитной направляющей, что выдвигает специальные требования при их складировании;
- Низкую эффективность использования материала постоянных магнитов для генерирования силы притяжения к ферромагнитной направляющей (низкие удельные характеристики, такие, например, как отношение силы притяжения к весу ПМ или всего ГЭМ).
Раскрытие изобретения
Задача, на достижение которой направлено предлагаемое устройство, заключается в устранении упомянутых выше недостатков.
Задача изобретения решается с помощью магнитного устройства, включающего в себя постоянные магниты, электромагнитную катушку и магнитопровод, имеющий три полюса. Электромагнитная катушка расположена между крайними полюсами и охватывает средний полюс магнитопровода. Два постоянных магнита установлены с двух сторон от среднего полюса и электромагнитной катушки. Их вектора намагниченности ориентированы встречно.
Длина полюсов магнитопровода больше высоты постоянных магнитов и электромагнитной катушки. Постоянные магниты (и предпочтительно электромагнитная катушка) расположены у основания полюсов магнитопровода, а концы полюсов магнитопровода выступают над постоянными магнитами и электромагнитной катушкой в одну сторону.
В одном из вариантом реализации магнитного устройства, по меньшей мере, один полюс магнитопровода может содержать дополнительный постоянный магнит, направление которого согласовано с направлением постоянных магнитов около среднего выступа магнитопровода (с учетом геометрии магнитопровода, изменяющей направление магнитного поля). Кроме того, магнитное устройство может содержать дополнительные электромагнитные катушки, охватывающие крайние полюсы магнитопровода. Магнитопровод предпочтительно является симметричным относительно среднего полюса, а полюсы магнитопровода предпочтительно расположены параллельно друг другу. Кроме того, полюсы магнитопровода преимущественно лежат в одной плоскости. Магнитное устройство может содержать ярма, соединяющие крайние полюса с постоянными магнитами, прилегающими к крайним полюсам или соединенными с ними дополнительными ярмами.
Задача изобретения также решается с помощью транспортного средства, предназначенного для перемещения по путепроводу с ферромагнитным рельсом, имеющего магнитный подвес с использованием магнитного устройства по любому из вышеописанных вариантов.
Техническим результатом настоящего изобретение является создание эффективного магнитного устройства для ЭМП, обеспечивающего левитацию с «нулевым энергопотреблением», который в сравнении с обычным ЭМ является более компактным и легким (т.е. с меньшими габаритами/весом) при обеспечении той же величины магнитного поля (силы) в левитационном зазоре, либо может создавать магнитное поле большей величины при сохранении тех же габаритов/веса, что является другим вариантом проявления того же самого технического результата. Определяя указанный технический результат другими словами, можно сказать что он заключается в повышении удельной силы электромагнита, т.е. отношению подъемной силы к весу электромагнита при фиксированном зазоре.
Достижение технического результата происходит за счет более эффективного использования в левитационном зазоре магнитного потока, генерируемого ПМ в ГЭМ с такой (Ш-образной) конфигурацией. При этом значительно снижается уровень полей рассеяния и уменьшается вдвое количество и вес электромагнитных катушек.
Благодаря повышенной эффективности магнитного устройства в соответствии с настоящим изобретением удается понизить его габариты по сравнению с гибридными электромагнитами из уровня техники, в том числе прототипами. То есть, гибридный электромагнит в соответствии с настоящим изобретением благодаря своей эффективности становится компактным. Компактность необходимо понимать как снижение размера гибридного устройства по сравнению с уровнем техники за счет повышенной эффективности, благодаря чему гибридный электромагнит по настоящему изобретению обеспечивает те же или большие величины магнитного поля при меньших размерах по сравнению с устройствами из уровня техники.
Краткое описание чертежей
На фигуре показан вид компактного магнитного устройства в соответствии с настоящим изобретением в разрезе.
Осуществление изобретения
Далее изобретение описывается со ссылкой на сопровождающую фигуру, на которой изображен предпочтительный вариант реализации изобретения. Последующее описание и чертеж не предназначены для ограничения объема охраны, который определяется формулой изобретения, а даны с целью упрощения понимания сущности изобретения и возможных вариантов его осуществления, которые не исчерпываются представленными на фигуре и в описании. Изобретение далее описано по отношению к универсальному компактному магнитному устройству для системы маглев, то есть для транспортного средства, предназначенного для перемещения по путепроводу с ферромагнитными направляющими и имеющего магнитный подвес с использованием магнитного устройства, но не ограничивается этим назначением и может быть использовано по отношению к любым применениям магнитных устройств.
Описание изобретения дано для магнитного устройства в ориентации, показанной на фигуре, в соответствии с которой основания полюсов магнитопровода (прилегающие на фигуре к ярмам) расположены снизу, а концы полюсов сверху. Однако такое расположение не ограничивает объем охраны изобретения и дано лишь в целях упрощения пояснения. В общем случае, определяемом формулой изобретения, ориентация компактного электромагнита не является однозначно заданной и может меняться. В соответствии с изменением ориентации электромагнита изменяется и расположение его частей в пространстве.
Основания полюсов могут называться концами полюсов, которые находятся в основании магнитопровода. Различие между ними и другими концами полюсов, используемых для создания магнитного поля в зазоре с феррорельсом, заключается в том, что верхние концы полюсов являются открытыми, свободными и магнитное поле с них направлено вверх к феррорельсу, а нижние концы полюсов (то есть их основания) соединены между собой посредством постоянных магнитов и ярм, если они имеются, которые направляют магнитное поле от основания (нижнего конца) одного полюса к основанию другого полюса, формируя тем самым вместе с постоянными магнитами и ярмами (или без последних) основание магнитопровода.
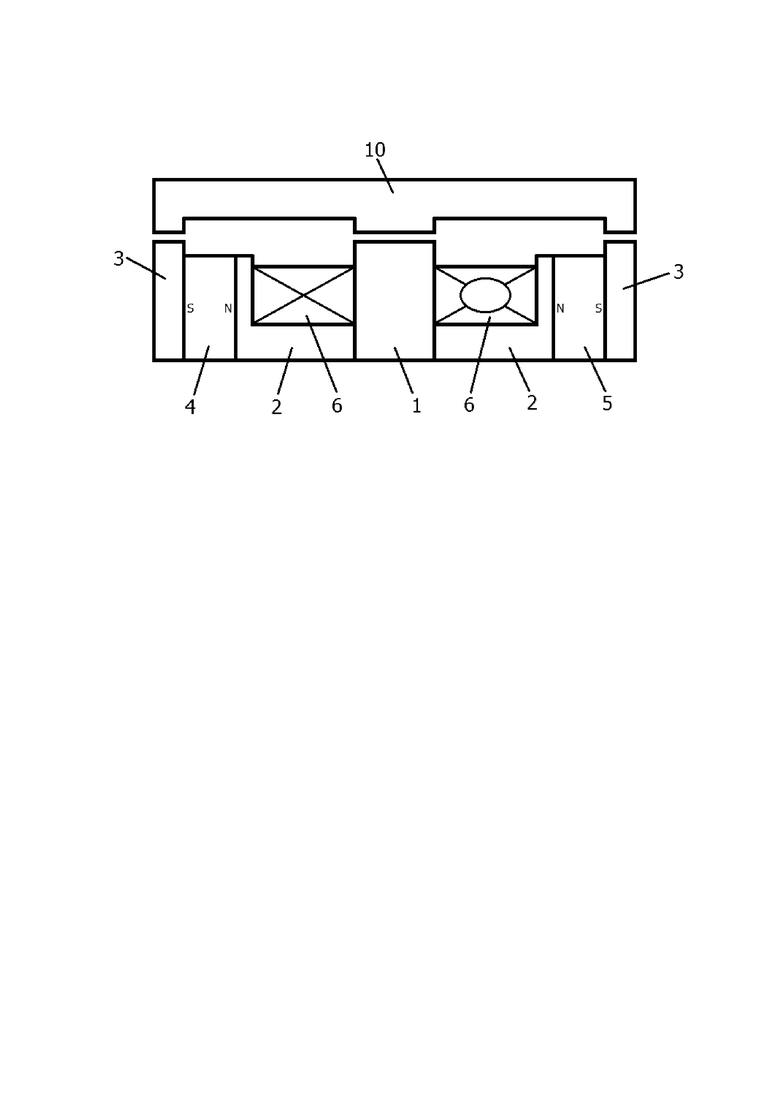
На фигуре в разрезе показано магнитное устройство, содержащее сборный магнитопровод. Магнитопровод содержит следующие элементы: средний полюс 1, ярма 2 и два крайних полюса 3. Кроме магнитопровода устройство содержит постоянные магниты 4 и 5 и электромагнитную катушку 6. Показанное универсальное магнитное устройство ориентировано преимущественно на применение в транспортной системе МАГЛЕВ, для чего оно располагается под ферромагнитной направляющей (рельсом) 10 с равновесным зазором, при котором обеспечивается уравновешивание веса транспортного средства пондеромоторными силами ПМ и электромагнитов. Концы полюсов (верхние, свободные) обращены к рельсу, их основания (то есть нижние концы) соединены с ярмом.
Данная схема может быть представлена как объединение двух двухполюсных ГЭМ в трехполюсную схему с тем же зазором, что и в прототипе. Отметим два новых положительных свойства, проявляющихся у такого трехполюсного ГЭМ: (1) увеличение средней плотности магнитного потока в зазоре среднего полюса нового ГЭМ по сравнению с двумя исходными ГЭМ, приводящее к увеличению силы притяжения к направляющей более чем в 2 раза при том, что масса трехполюсной ГЭМ меньше массы двух двухполюсных ГЭМ (число катушек не удваивается при объединении двух двухполюсных ГЭМ в трехполюсную схему, т.к. остается по-прежнему одна катушка, но расположенная не вертикально, а горизонтально, а кроме того, масса магнитопровода несколько меньше за счет более оптимального расположения полюсов); (2) встречное включение векторов намагниченности двух ПМ в ГЭМ приводит к более быстрому спаду полей рассеяния при удалении от ГЭМ, существенно улучшая тем самым электромагнитную совместимость.
Величина магнитного момента постоянных магнитов (произведение удельной намагниченности на объем магнита) определяет усилие, создаваемое гибридным магнитом, при желаемой величине воздушного зазора.
Сборный магнитопровод настоящего гибридного электромагнита также может называться Ш-образным (или Е-образным) магнитопроводом, содержащим полюса 1 и 3, соединенные ярмами 2, причем в ярмах 2 размещены постоянные магниты 4 и 5. Поскольку постоянные магниты 4 и 5 «замещают» часть ярма 2, то они могут рассматриваться как элементы Ш-образного магнитопровода, если использовать такое расширение определения магнитопровода. Таким образом, ярма 2 соединяют средний полюс 1 с постоянными магнитами 4 и 5, прилегающими к крайним полюсам 3 (непосредственно или через дополнительные ярма - в последнем варианте постоянные магниты могут считаться соединенными с крайними полюсами с помощью дополнительных ярм).
В некоторых вариантах сборный («Ш-образный») магнитопровод может не содержать ярм, которые оказываются полностью замещенными постоянными магнитами, непосредственно соединяющими соответствующие концы крайних полюсов с концом среднего полюса. Кроме того, магнитопровод может содержать дополнительные ярма, соединяющие постоянные магниты с крайними полюсами. Магнитопровод предпочтительно является симметричным относительно среднего полюса, а полюсы магнитопровода предпочтительно расположены параллельно друг другу. Кроме того, полюсы магнитопровода преимущественно лежат в одной плоскости. Такое расположение магнитопроводов в одной плоскости может быть описано как нахождение в одной плоскости их концов, то есть нахождение в одной плоскости точек, находящихся на концах полюсов, например, на их гранях, углах или плоскостях (преимущественно точек, одинаково расположенных на концах полюсов).
Магнитопровод в рассматриваемой конфигурации объединяет магнитные потоки постоянных магнитов и электромагнитной катушки и концентрирует его в зазоре между полюсами 1, 3 магнитопровода гибридного электромагнита и ферромагнитной направляющей 10. При этом объединение магнитных потоков имеет векторный характер - потоки могут как складываться, так и вычитаться в зависимости от знака тока в катушке.
Конфигурация гибридного магнита, состоящего из ярм 2, полюсов 1, 3, постоянных магнитов 4, 5 и электромагнитной катушки 6, обеспечивает более эффективное направление магнитного потока в зазоре, и, как следствие, увеличение силы притяжения при общем снижении веса по сравнению с прототипами.
Благодаря лучшему потокосцеплению среднего полюса подъемная сила, при том же объеме постоянных магнитов и той же суммарной площади полюсов, будет выше, чем в прототипе. Поэтому, а также за счет более компактного расположения катушки, ширина ферромагнитной направляющей растет медленнее, чем уменьшается толщина путепровода, что приводит к удешевлению путепровода.
Постоянные магниты 4 и 5 предпочтительно имеют одинаковые размеры и создают преимущественно одинаковые магнитные поля. Однако вектора намагниченностей у этих магнитов ориентированы встречно, что отражено в том, что постоянные магниты на фигуре имеют разные номера позиций 4 и 5.
Охват электромагнитной катушкой среднего выступа магнитопровода обеспечивает уменьшение высоты магнитного устройства, так как постоянные магниты и катушка расположены в одной плоскости. Кроме того, расположение электромагнитной катушки между постоянными магнитами уменьшает вес катушки, так как для обеспечения одной и той же силы магнитного поля, формируемой катушкой, требуется одно и то же количество витков, а катушка, имеющая наименьший из возможных диаметр (за счет прилегания к среднему выступу) длина витков будет наименьшая, что означает максимально возможное снижение расхода проволоки для намотки катушки, которое приводит к минимизации веса электромагнитной катушки и магнитного устройства в целом. Таким образом, повышается удельная мощность магнитного устройства, которую можно определить как величину формируемого магнитного поля по отношению к его массе. Это позволяет применять в качестве элементов, компенсирующих флуктуации с помощью переменного магнитного поля, мощные электромагнитные катушки, что обеспечивает повышенную компенсационную способность магнитного устройства, т.е такое магнитное устройство может применяться для транспортных средств, левитирующих около путепровода со значительными неровностями и разбросом в размерах.
Длина полюсов магнитопровода, то есть размеров вдоль полюсов между их основаниями и концами (или, другими словами, между концами каждого полюса) должна быть больше высоты постоянных магнитов и электромагнитной катушки, то есть размера постоянных магнитов и электромагнитной катушки в том же направлении, проходящем вдоль полюсов (на фигуре - снизу вверх). Такое соотношение размеров полюсов, магнитов и катушки необходимо для полной концентрации магнитного поля в полюсах магнитопровода перед тем, как оно будет направлено в зазор с феррорельсом и, соответственно, для повышения эффективности гибридного электромагнита. При таких размерах концы полюсов магнитопровода будут выступать над постоянными магнитами и электромагнитной катушкой, а постоянные магниты и электромагнитная катушка будут отделены от феррорельса зазором большей величины, чем зазор между феррорельсом и концами полюсов, в результате чего магнитное поле от постоянных магнитов и электромагнитной катушки будет концентрироваться в полюсах, а не создавать паразитные наводки или уменьшать суммарное магнитное поле, как это происходит в том случае, когда постоянные магниты и электромагнитная катушка расположены слишком близко к феррорельсу.
Постоянные магниты и электромагнитная катушка, как показано на фигуре, расположены у основания полюсов магнитопровода, а свободные концы полюсов магнитопровода (т.е. концы полюсов, противоположные тем, которые участвуют в формировании основания магнитопровода) выступают над постоянными магнитами и электромагнитной катушкой в одну сторону. Такое расположение постоянных магнитов (и предпочтительно электромагнитной катушки) у основания, а также направленность свободных концов полюсов в одну сторону обеспечивают наибольшую концентрацию магнитного поля в феррорельсе и, следовательно, максимально увеличивают эффективность гибридного электромагнита.
Транспортное средство, в подвесах которого установлены гибридные электромагниты, удерживается над путевой структурой при равновесном зазоре только постоянными магнитами, обеспечивающими левитацию без энергозатрат.
Постоянные магниты 4 и 5 установлены с двух сторон от среднего полюса 1 магнитопровода таким образом, что их вектора намагниченности направлены встречно. На фигуре показано, что магниты 4 и 5 повернуты друг к другу северными полюсами N. Встречная установка постоянных магнитов 4 и 5 означает, что поперечные к движению (горизонтальные на фигуре) компоненты их векторов магнитного момента противоположно направлены. При этом сами вектора магнитного момента постоянных магнитов 4 и 5 могут быть направлены друг к другу под углом от 0° до 90°. Магнитные потоки от обоих магнитов объединяются в среднем полюсе 1. В ферромагнитной направляющей 10 путевой структуры объединенный магнитный поток разделяется на два, каждый из которых затем замыкается через южные полюса S соответствующих постоянных магнитов.
Благодаря встречной установке постоянных магнитов обеспечивается уменьшение полей рассеяния. Благодаря более эффективному использованию электромагнитных катушек снижен вес гибридного электромагнита.
Гибридные электромагнитные подвесы позволяют в стационарных условиях левитировать практически без потребления энергии, что называется как управление с нулевым энергопотреблением (zero-power control).
Воздушный зазор, при котором сила притяжения, создаваемая постоянными магнитами гибридного магнита, включенного в подвес транспортного средства, равна весу транспортного средства определяется как равновесный зазор, а соответствующее положение подвеса - как равновесное положение.
Величина управляющего тока в ГЭМП при левитации транспортного средства обычно находится вблизи нуля с малой амплитудой вариаций, определяемой степенью отклонения от равновесного положения. Существенно отличные от нуля импульсы тока, в соответствии с алгоритмом управления, будут кратковременно подаваться в катушку только в случаях либо резкого изменения веса ТС (погрузка или разгрузка), либо появления значительного изменения (скачка) величины зазора (например, в местах стыка направляющих, при «взлете» и «посадке»), вследствие чего величина зазора начнет меняться и принимать новое стационарное (равновесное) значение.
Сильные постоянные магниты на основе редкоземельных элементов (NdFeB) используются для обеспечения левитации, а электромагниты - для стабилизации левитационного зазора. Сила, создаваемая ПМ, уравновешивает вес ТС при некоторой равновесной величине воздушного зазора, что обеспечивает левитацию ТС при минимальном электропотреблении. При изменении веса ТС, вследствие погрузки или разгрузки, воздушный зазор между полюсами гибридного магнита и ферромагнитной направляющей («рельсом») будет изменяться в сторону равенства его с равновесным зазором в данный момент. Поддержание и стабилизацию равновесного воздушного зазора обеспечивает активно управляемый ЭМ, в то время как уравновешивание веса по-прежнему обеспечивает сила, создаваемая ПМ.
Магнитный поток, который создается постоянными магнитами предлагаемого гибридного магнита в воздушном зазоре между полюсами магнитопровода и ферромагнитной направляющей, определяет силу, с которой он притягивается к ферромагнитной направляющей. Сила притяжения при этом зависит от величины воздушного зазора.
Электромагнитная катушка необходима для стабилизации равновесного левитационного зазора между полюсами гибридного электромагнита и ферромагнитной направляющей при стоянках и всех режимах движения транспортного средства, включая возможные внешние кратковременные воздействия на сам вагон (например, неровности направляющей, порывы ветра, перемещения груза или пассажиров).
Стабилизация равновесного зазора обеспечивается изменением управляющего тока в электромагнитной катушке по специальному алгоритму, изменяющему величину и направление тока. Поскольку система находится в положении неустойчивого равновесия, управляющий ток в электромагнитной катушке постоянно варьируется около нулевых значений, что обеспечивает минимальное энергопотребление (левитации с так называемым «нулевым энергопотреблением»).
Электромагнитная катушка 6 расположена между крайними полюсами 3 магнитопровода, охватывая средний полюс 1 магнитопровода. Катушка 6 находится не только между крайними полюсами, но и между постоянными магнитами 4 и 5. Более точно, витки катушки 6 расположены между средним полюсом 1 и постоянными магнитами 4 и 5 (соответственно с той или иной стороны от среднего полюса 1), что одновременно означает также и то, что витки катушки 6 расположены между средним полюсом 1 и крайними полюсами 3. В целом же катушка 6 расположена как между постоянными магнитами 4 и 5, так и между крайними полюсами 3.
На фигуре электромагнитная катушка 6 отображена двумя сечениями, в которых ток течет в противоположных направлениях. На фигуре, к примеру, показано, что в левом сечении ток протекает от наблюдателя, а в правом - по направлению к наблюдателю. Направления токов могут быть и обратными. В зависимости от направления тока в катушке генерируемый ею магнитный поток либо складывается с магнитным потоком постоянных магнитов, либо вычитается. Соответственно увеличивается или уменьшается величина пондеромоторной силы, притягивающей полюса гибридного магнита к ферромагнитной направляющей. Величина и направление тока в катушке зависит от текущих условий и определяется алгоритмом управления.
Применение мощных высококоэрцитивных постоянных магнитов, создающих сильное постоянное магнитное поле, позволяет обеспечить повышенную грузоподъемность левитирующего транспортного средства с такими гибридными электромагнитами при минимальном энергопотреблении.
Благодаря горизонтальному расположению электромагнитной катушки в соответствии с изобретением, показанному на фигуре, требуется всего одна катушка для обеспечения левитации с «нулевым энергопотреблением», что снижает вес магнитного устройства по сравнению с вариантами с другим количеством электромагнитных катушек.
Дополнительным преимуществом магнитного устройства в соответствии с настоящим изобретением является то, что все его элементы расположены параллельно или под углом 90° друг к другу, что упрощает изготовление элементов и сборку магнитного устройства в целом.
В некоторых вариантах реализации в одном или нескольких полюсах и/или в ярме Ш-образного магнитопровода могут быть установлены дополнительные постоянные магниты, ориентация (направление) которых согласована с ориентацией (направлением) постоянных магнитов около среднего полюса магнитопровода (с учетом геометрии магнитопровода, изменяющей направление магнитного поля). Ориентация (т.е. направление намагниченности) дополнительных магнитов определяется по отношению к направлению магнитного поля (т.е. направлению намагниченности), создаваемого постоянными магнитами 4 и 5 в среднем полюсе 1 магнитопровода. Применение дополнительных постоянных магнитов позволяет дополнительно увеличить удельную силу магнитного устройства, так как при замене части магнитопровода постоянными магнитами масса не изменится, а сила формируемого в зазоре между магнитопроводом и путепроводом магнитного поля увеличивается. Постоянные магниты предпочтительно устанавливаются симметрично относительно среднего полюса для реализации максимального увеличения полезного (т.е. направляемого в зазор) магнитного поля. Дополнительные постоянные магниты могут устанавливаться и несимметрично или иметь разную величину намагниченности для долговременной компенсации наклона (крена) гибридного электромагнита относительно ферромагнитной направляющей.
Кроме того, в некоторых вариантах реализации магнитное устройство может содержать дополнительные электромагнитные катушки, охватывающие крайние полюса магнитопровода. Это дополнительно увеличивает переменную составляющую магнитного поля без увеличения высоты магнитного устройства. В дополнительные катушки может подаваться различный ток для создания углового момента в целях компенсации наклона (крена) гибридного электромагнита относительно ферромагнитной направляющей.
Универсальное магнитное устройство может также называться гибридным электромагнитом, гибридным магнитом или компактным гибридным магнитом, компактным магнитным устройством или компактным гибридным электромагнитом. Каждое из этих наименований может дополняться характеристикой «универсальный» или указывающей на определенное назначение. В основном магнитное устройство по настоящему изобретению предназначено для применения в системе маглев, то есть в транспортном средстве, например поезде, перемещающемся по путепроводу с ферромагнитными рельсами с применением магнитной левитации, обеспечиваемой магнитным устройством. В то же время магнитное устройство по настоящему изобретению может применяться и в других системах, устройствах и изделиях, в том числе имеющих другие предназначения.
Все указанные в описании технические результаты, в том числе дополнительные, достигаются с помощью магнитного устройства в соответствии с настоящим изобретением одновременно и неразрывно друг от друга. Представленный на сопровождающей фигуре вариант осуществления, а также детально описанные дополнительные варианты осуществления предназначены для упрощения понимания сущности изобретения и не должны толковаться как ограничивающие объем охраны изобретения, определяемый последующей формулой изобретения. Описанные варианты могут объединяться и комбинироваться в любых сочетаниях, обеспечивающих реализацию принципа действия и достижение заявленных технических результатов. В результате комбинации отдельных вариантов могут достигаться дополнительные технические результаты.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИБРИДНЫЙ ЭЛЕКТРОМАГНИТ ДЛЯ СИСТЕМЫ МАГЛЕВ | 2020 |
|
RU2739939C1 |
| ГИБРИДНЫЙ МАГНИТ БЕЗ ПОЛЕЙ РАССЕЯНИЯ ДЛЯ СИСТЕМЫ МАГЛЕВ | 2020 |
|
RU2743753C1 |
| МАГНИТНЫЙ ПОДВЕС ТРАНСПОРТНОГО СРЕДСТВА ДЛЯ КОМБИНИРОВАННОГО ПУТЕПРОВОДА | 2014 |
|
RU2573135C1 |
| РЕГУЛИРУЕМЫЙ МАГНИТНЫЙ ПОДВЕС ТРАНСПОРТНОГО СРЕДСТВА С КОРРЕКЦИЕЙ ПОДЪЕМНОЙ СИЛЫ | 2015 |
|
RU2611858C1 |
| МАГНИТНЫЙ ПОДВЕС ТРАНСПОРТНОГО СРЕДСТВА | 2022 |
|
RU2779326C1 |
| КОМБИНИРОВАННЫЙ МАГНИТНЫЙ ПОДВЕС ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2573524C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ КОМБИНИРОВАННОГО ПОДВЕСА И ВЫСОКОСКОРОСТНОЙ МАГНИТОЛЕВИТАЦИОННЫЙ ТРАНСПОРТ С КОМБИНИРОВАННЫМ ПОДВЕСОМ, ФУНКЦИОНИРУЮЩИМ В СООТВЕТСТВИИ С ТАКИМ СПОСОБОМ | 2022 |
|
RU2782389C1 |
| ЛЕВИТИРУЮЩИЙ ПОДВЕС | 2023 |
|
RU2816409C1 |
| СВЕРХПРОВОДЯЩЕЕ ЭЛЕКТРОМАГНИТНОЕ УСТРОЙСТВО, МАГНИТНЫЙ ПОДВЕС И ТРАНСПОРТНОЕ СРЕДСТВО, СНАБЖЕННЫЕ ТАКИМ УСТРОЙСТВОМ | 2014 |
|
RU2566507C1 |
| ЛЕВИТИРУЮЩИЙ ПОДВЕС С ЛИНЕЙНЫМ ДВИГАТЕЛЕМ И ПОВОРОТНЫМ УСТРОЙСТВОМ | 2023 |
|
RU2816413C1 |
Изобретение относится к области электротехники, к устройству магнитного подвеса левитационных транспортных средств. Технический результат – улучшение массогабаритных характеристик. Заявленный гибридный электромагнит включает в себя постоянные магниты, электромагнитную катушку и магнитопровод, состоящий из трех полюсов. Электромагнитная катушка расположена между крайними и средним полюсами магнитопровода и охватывает средний полюс магнитопровода. Постоянные магниты установлены векторами намагниченности встречно с двух сторон от среднего полюса магнитопровода и электромагнитной катушки. Длина полюсов магнитопровода больше высоты постоянных магнитов и электромагнитной катушки, а концы полюсов магнитопровода выступают над постоянными магнитами и электромагнитной катушкой в одну сторону. 2 н. и 7 з.п. ф-лы, 1 ил.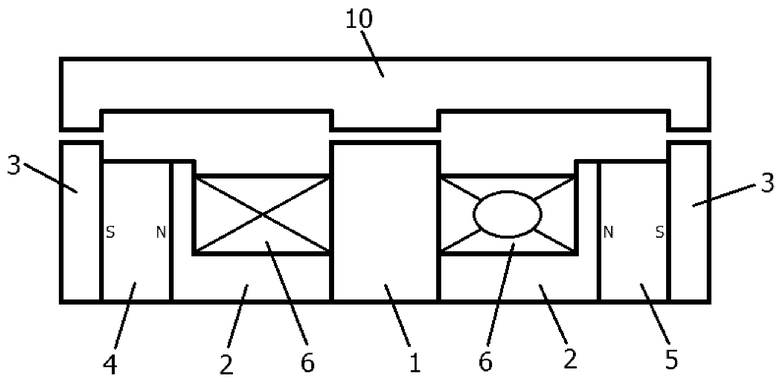
1. Гибридный электромагнит, включающий в себя постоянные магниты, электромагнитную катушку и магнитопровод, состоящий из трех полюсов, причем электромагнитная катушка расположена между крайними полюсами и охватывает средний полюс магнитопровода, причем постоянные магниты расположены у основания полюсов магнитопровода и установлены с двух сторон от среднего полюса и электромагнитной катушки, причем вектора намагниченности ориентированы встречно, причем длина полюсов магнитопровода больше высоты постоянных магнитов и электромагнитной катушки, а концы полюсов магнитопровода выступают над постоянными магнитами и электромагнитной катушкой в одну сторону.
2. Гибридный электромагнит по п. 1, отличающийся тем, что по меньшей мере один полюс магнитопровода содержит дополнительный постоянный магнит, направление которого согласовано с направлением постоянных магнитов около среднего полюса магнитопровода.
3. Гибридный электромагнит по п. 1, отличающийся тем, что содержит дополнительные электромагнитные катушки на крайних полюсах и охватывающие их.
4. Гибридный электромагнит по п. 1, отличающийся тем, что магнитопровод является симметричным относительно среднего полюса.
5. Гибридный электромагнит по п. 1, отличающийся тем, что полюсы магнитопровода расположены параллельно друг другу.
6. Гибридный электромагнит по п. 1, отличающийся тем, что полюсы магнитопровода лежат в одной плоскости.
7. Гибридный электромагнит по п. 1, отличающийся тем, что содержит ярма, соединяющие средний полюс с постоянными магнитами, прилегающими к крайним полюсам.
8. Гибридный электромагнит по п. 1, отличающийся тем, что содержит ярма, соединяющие средний полюс с постоянными магнитами, соединенными с крайними полюсами дополнительными ярмами.
9. Транспортное средство, предназначенное для перемещения по путепроводу с ферромагнитными направляющими, имеющее магнитный подвес с применением гибридных электромагнитов по любому из пп. 1-8.
| CN 201174286 Y, 31.12.2008 | |||
| CN 101537799 A, 23.09.2009 | |||
| US 8324777 B2, 04.12.2012 | |||
| РЕГУЛИРУЕМЫЙ МАГНИТНЫЙ ПОДВЕС ТРАНСПОРТНОГО СРЕДСТВА С КОРРЕКЦИЕЙ ПОДЪЕМНОЙ СИЛЫ | 2015 |
|
RU2611858C1 |
| ТАНГЕНЦИАЛЬНАЯ МАГНИТНАЯ ПОДВЕСКА | 2007 |
|
RU2345917C1 |

