[1] Настоящая заявка является заявкой для национальной фазы раздела 371 по международной заявке № PCT/CN2021/077058, поданной 20 февраля 2021 года под названием «NON-INVASIVE DETECTION METHOD, DEVICE, SYSTEM AND WEARABLE APPARATUS FOR TISSUE ELEMENT», которая испрашивает приоритет заявки на патент Китая № 202010121193.1, поданной 26 февраля 2020 года, и содержание которой включено в настоящий документ посредством ссылки во всей своей полноте.
ОБЛАСТЬ ТЕХНИКИ
[2] Настоящее изобретение относится к области технологии детектирования спектров и, в частности, к способу, устройству, системе и носимому устройству неинвазивного детектирования для элемента ткани.
ПРЕДПОСЫЛКИ
[3] Способ детектирования методом инфракрасной спектроскопии в ближней области обладает свойствами быстроты, неинвазивности, предоставления многомерной информации и т. д., и его обычно используют для обнаружения элемента ткани, включая глюкозу в крови, жир, белые кровяные клетки и т. д. Однако, достоверный сигнал для детектирования слабый из-за слабого поглощения детектируемого элемента ткани и небольшого изменения концентрации детектируемого элемента ткани детектируемого объекта. Кроме того, он очень чувствителен к помехам фона организма человека и изменению среды измерения, и помехи могут даже скрывать информацию о детектируемом элементе ткани, что затрудняет извлечение слабого сигнала в условиях помех высоких фоновых шумов.
[4] Для решения вышеупомянутой проблемы предложен способ опорного измерения на основе теории плавающей системы координат. То есть для детектируемого элемента ткани существует расстояние от источника до детектора, в котором поглощение и рассеяние оказывают на интенсивность диффузно-рассеянного света одинаковое воздействие в противоположных направлениях, следовательно, значение интенсивности диффузно-рассеянного света, излучаемого из положения излучения, соответствующего этому расстоянию от источника до детектора, имеет нулевую чувствительность к изменению концентрации детектируемого элемента ткани. Такое положение излучения с вышеописанными свойствами можно назвать опорным положением (или базовым положением), а соответствующее расстояние от источника до детектора является опорным расстоянием. Кроме того, для детектируемого элемента ткани существует также расстояние от источника до детектора, соответствующее положению излучения, где излучается значение интенсивности диффузно-рассеянного света, имеющее наибольшую чувствительность к изменению концентрации элемента ткани. Такое положение излучения с вышеописанными свойствами можно назвать положением измерения, а соответствующее расстояние от источника до детектора является расстоянием измерения. Значение интенсивности диффузно-рассеянного света, соответствующее опорному расстоянию, отражает отклик помехи, помимо изменения концентрации детектируемого элемента ткани в процессе детектирования. Значение интенсивности диффузно-рассеянного света, соответствующее расстоянию измерения, отражает отклик детектируемого элемента ткани и отклик помехи, помимо детектируемого элемента ткани. Следовательно, опорное положение и/или положение измерения должны быть точно определены.
[5] В соответствующей области техники значения интенсивности диффузно-рассеянного света, излучаемые с поверхности детектируемого места, обычно принимаются фоточувствительными поверхностями на ограниченном количестве расстояний от источника до детектора от центра падающего луча с центральным падением. Ограниченное количество расстояний от источника до детектора определяют в соответствии со средним параметром большинства детектируемых объектов. На основании этого опорное расстояние и расстояние измерения дополнительно определяют из расстояний от источника до детектора.
[6] В процессе достижения концепции настоящего изобретения автор изобретения обнаружил, что в соответствующей области техники по меньшей мере существует проблема, заключающаяся в том, что точность детектирования не является высокой.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[7] В аспекте настоящего изобретения предоставлен способ определения расстояния при неинвазивном детектировании элемента ткани, включающий: получение для детектируемого места детектируемого объекта первого значения интенсивности света для каждой предварительно определенной длины волны из по меньшей мере одной предварительно определенной длины волны на каждом расстоянии от источника до детектора из по меньшей мере двух расстояний от источника до детектора; и определение первого измеренного значения интенсивности света и/или первого опорного значения интенсивности света из первых значений интенсивности света, соответствующих предварительно определенной длине волны, в соответствии с абсолютным значением разности интенсивности света, вызванным изменением концентрации детектируемого элемента ткани, определение расстояния от источника до детектора, соответствующего первому измеренному значению интенсивности света, в качестве расстояния измерения, и определение расстояния от источника до детектора, соответствующего первому опорному значению интенсивности света, в качестве опорного расстояния, при этом первое измеренное значение интенсивности света соответствует наибольшему абсолютному значению разности интенсивности света, вызванной изменением концентрации детектируемого элемента ткани, первое опорное значение интенсивности света соответствует наименьшему абсолютному значению первой разности интенсивности света, вызванной изменением концентрации детектируемого элемента ткани, и разность интенсивности света, вызванная изменением концентрации детектируемого элемента ткани, представляет собой разность между первым значением интенсивности света и соответствующим предварительно определенным значением интенсивности света.
[8] В другом аспекте настоящего изобретения предоставлен способ определения расстояния при неинвазивном детектировании элемента ткани, включающий: получение для детектируемого места детектируемого объекта оптического параметра ткани, соответствующего каждой предварительно определенной длине волны из по меньшей мере одной предварительно определенной длины волны, и взаимосвязи изменения оптического параметра ткани, вызванной изменением концентрации детектируемого элемента ткани; и определение каждого расстояния измерения и/или каждого опорного расстояния в соответствии с оптическим параметром ткани, соответствующим каждой предварительно определенной длине волны, и взаимосвязью изменения оптического параметра ткани, вызванной изменением концентрации детектируемого элемента ткани.
[9] В другом аспекте настоящего изобретения предоставлен способ неинвазивного детектирования для элемента ткани, включающий: получение для детектируемого места детектируемого объекта второго измеренного значения интенсивности света для каждой предварительно определенной длины волны из по меньшей мере одной предварительно определенной длины волны на расстоянии измерения и/или второго опорного значения интенсивности света для каждой предварительно определенной длины волны из по меньшей мере одной предварительно определенной длины волны на опорном расстоянии, при этом каждое расстояние измерения и каждое опорное расстояние определены согласно способу определения расстояния при неинвазивном детектировании элемента ткани; и определение концентрации детектируемого элемента ткани согласно второму измеренному значению интенсивности света для каждой предварительно определенной длины волны и/или второму опорному значению интенсивности света для каждой предварительно определенной длины волны.
[10] В другом аспекте настоящего изобретения предоставлено устройство определения расстояния при неинвазивном детектировании элемента ткани, содержащее: первый модуль получения, выполненный с возможностью получения для детектируемого места детектируемого объекта первого значения интенсивности света, соответствующего каждой предварительно определенной длины волны из по меньшей мере одной предварительно определенной длины волны на каждом расстоянии от источника до детектора из по меньшей мере двух расстояний от источника до детектора; и первый модуль определения, выполненный с возможностью определения первого измеренного значения интенсивности света и/или первого опорного значения интенсивности света из первых значений интенсивности света, соответствующих предварительно определенной длине волны, в соответствии с абсолютным значением разности интенсивности света, вызванной изменением концентрации детектируемого элемента ткани, определения расстояния от источника до детектора, соответствующего первому измеренному значению интенсивности света, в качестве расстояния измерения, и определения расстояния от источника до детектора, соответствующего первому опорному значению интенсивности света, в качестве опорного расстояния, при этом первое измеренное значение интенсивности света соответствует наибольшему абсолютному значению разности интенсивности света, вызванной изменением концентрации детектируемого элемента ткани, первое опорное значение интенсивности света соответствует наименьшему абсолютному значению первой разности интенсивности света, вызванной изменением концентрации детектируемого элемента ткани, и разность интенсивности света, вызванная изменением концентрации детектируемого элемента ткани, представляет собой разность между первым значением интенсивности света и соответствующим предварительно определенным значением интенсивности света.
[11] В другом аспекте настоящего изобретения предоставлено устройство определения расстояния при неинвазивном детектировании элемента ткани, содержащее: второй модуль получения, выполненный с возможностью получения для детектируемого места детектируемого объекта оптического параметра ткани, соответствующего каждой предварительно определенной длине волны из по меньшей мере одной предварительно определенной длины волны, и взаимосвязи изменения оптического параметра ткани, вызванной изменением концентрации детектируемого элемента ткани; и второй модуль определения, выполненный с возможностью определения каждого расстояния измерения и/или каждого опорного расстояния в соответствии с оптическим параметром ткани, соответствующим каждой предварительно определенной длине волны, и взаимосвязью изменения оптического параметра ткани, вызванной изменением концентрации детектируемого элемента ткани.
[12] В другом аспекте настоящего изобретения предоставлено устройство неинвазивного детектирования для элемента ткани, содержащее: датчик интенсивности света, выполненный с возможностью получения для детектируемого места детектируемого объекта второго измеренного значения интенсивности света для каждой предварительно определенной длины волны из по меньшей мере одной предварительно определенной длины волны на расстоянии измерения и/или второго опорного значения интенсивности света для каждой предварительно определенной длины волны из по меньшей мере одной предварительно определенной длины волны на опорном расстоянии, при этом каждое расстояние измерения и каждое опорное расстояние определены с использованием устройства определения расстояния при неинвазивном детектировании элемента ткани; и процессор, выполненный с возможностью определения концентрации детектируемого элемента ткани согласно второму измеренному значению интенсивности света для каждой предварительно определенной длины волны и/или второму опорному значению интенсивности света для каждой предварительно определенной длины волны.
[13] В другом аспекте настоящего изобретения предоставлено носимое устройство, содержащее основную часть и вышеописанное устройство неинвазивного детектирования для элемента ткани; устройство неинвазивного детектирования для элемента ткани предусмотрено на основной части; и носимое устройство носится на детектируемом месте.
[14] В другом аспекте настоящего изобретения предоставлена система неинвазивного детектирования для элемента ткани, содержащая вышеописанное носимое устройство и терминал; процессор соединен с возможностью связи с датчиком интенсивности света и терминалом соответственно; носимое устройство носится на детектируемом месте; датчик интенсивности света выполнен с возможностью получения, для детектируемого места детектируемого объекта, второго измеренного значения интенсивности света для каждой предварительно определенной длины волны из по меньшей мере одной предварительно определенной длины волны на расстоянии измерения и/или второго опорного значения интенсивности света для каждой предварительно определенной длины волны из по меньшей мере одной предварительно определенной длины волны на опорном расстоянии, при этом каждое расстояние измерения и каждое опорное расстояние определены с использованием устройства определения расстояния при неинвазивном детектировании элемента ткани; процессор выполнен с возможностью обработки каждого второго измеренного значения интенсивности света и/или каждого второго опорного значения интенсивности света для каждой предварительно определенной длины волны для получения каждого обработанного второго измеренного значения интенсивности света и/или каждого обработанного второго опорного значения интенсивности света для каждой предварительно определенной длины волны, и передачи каждого обработанного второго измеренного значения интенсивности света и/или каждого обработанного второго опорного значения интенсивности света для каждой предварительно определенной длины волны на терминал; и терминал выполнен с возможностью определения концентрации детектируемого элемента ткани в соответствии с каждым обработанным вторым измеренным значением интенсивности света и/или каждым обработанным вторым опорным значением интенсивности света для каждой предварительно определенной длины волны.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
[15] На фиг. 1 представлена блок-схема способа определения расстояния при неинвазивном детектировании элемента ткани согласно вариантам осуществления настоящего изобретения;
[16] на фиг. 2 представлено схематическое изображение целевого кольцевого луча, сформированного на поверхности детектируемого места согласно вариантам осуществления настоящего изобретения;
[17] на фиг. 3 представлено схематическое изображение получения первого значения интенсивности света на основе фоточувствительной поверхности согласно вариантам осуществления настоящего изобретения;
[18] на фиг. 4 представлено схематическое изображение формирования целевого кольцевого луча точечным сканированием светового пятна согласно вариантам осуществления настоящего изобретения;
[19] на фиг. 5 представлено схематическое изображение формирования целевого кольцевого луча с помощью проекции луча согласно вариантам осуществления настоящего изобретения;
[20] на фиг. 6 представлено другое схематическое изображение получения первого значения интенсивности света на основе фоточувствительной поверхности согласно вариантам осуществления настоящего изобретения;
[21] на фиг. 7 представлено другое схематическое изображение получения первого значения интенсивности света на основе фоточувствительной поверхности согласно вариантам осуществления настоящего изобретения;
[22] на фиг. 8 представлено еще одно схематическое изображение получения первого значения интенсивности света на основе фоточувствительной поверхности согласно вариантам осуществления настоящего изобретения;
[23] на фиг. 9 представлено схематическое изображение экранирования интерференционного света согласно вариантам осуществления настоящего изобретения;
[24] на фиг. 10 представлено другое схематическое изображение экранирования интерференционного света согласно вариантам осуществления настоящего изобретения;
[25] на фиг. 11 представлена блок-схема другого способа определения расстояния при неинвазивном детектировании элемента ткани согласно вариантам осуществления настоящего изобретения;
[26] на фиг. 12 представлена блок-схема еще одного способа определения расстояния при неинвазивном детектировании элемента ткани согласно вариантам осуществления настоящего изобретения;
[27] на фиг. 13 представлена блок-схема способа неинвазивного детектирования для элемента ткани согласно вариантам осуществления настоящего изобретения;
[28] на фиг. 14 представлено схематическое изображение измерительного кольцевого луча и опорного кольцевого луча, сформированных на поверхности детектируемого места согласно вариантам осуществления настоящего изобретения;
[29] на фиг. 15 представлено схематическое изображение получения второго измеренного значения интенсивности света и второго опорного значения интенсивности света на основе фоточувствительной поверхности согласно вариантам осуществления настоящего изобретения;
[30] на фиг. 16 представлено другое схематическое изображение получения второго измеренного значения интенсивности света и второго опорного значения интенсивности света на основе фоточувствительной поверхности согласно вариантам осуществления настоящего изобретения;
[31] на фиг. 17 представлено другое схематическое изображение экранирования интерференционного света согласно вариантам осуществления настоящего изобретения;
[32] на фиг. 18 представлена блок-схема другого способа неинвазивного детектирования для элемента ткани согласно вариантам осуществления настоящего изобретения;
[33] на фиг. 19 представлена блок-схема еще одного способа неинвазивного детектирования для элемента ткани согласно вариантам осуществления настоящего изобретения;
[34] на фиг. 20 представлено схематическое структурное изображение устройства определения расстояния при неинвазивном детектировании элемента ткани согласно вариантам осуществления настоящего изобретения;
[35] на фиг. 21 представлено схематическое структурное изображение первого модуля получения согласно вариантам осуществления настоящего изобретения;
[36] на фиг. 22 представлено схематическое структурное изображение первого субмодуля формирования согласно вариантам осуществления настоящего изобретения;
[37] на фиг. 23 представлено схематическое структурное изображение другого устройства определения расстояния при неинвазивном детектировании элемента ткани согласно вариантам осуществления настоящего изобретения;
[38] на фиг. 24 представлено схематическое структурное изображение другого устройства определения расстояния при неинвазивном детектировании элемента ткани согласно вариантам осуществления настоящего изобретения;
[39] на фиг. 25 представлено схематическое структурное изображение другого устройства определения расстояния при неинвазивном детектировании элемента ткани согласно вариантам осуществления настоящего изобретения;
[40] на фиг. 26 представлено схематическое структурное изображение устройства определения расстояния при неинвазивном детектировании элемента ткани согласно вариантам осуществления настоящего изобретения;
[41] на фиг. 27 представлено схематическое структурное изображение еще одного устройства определения расстояния при неинвазивном детектировании элемента ткани согласно вариантам осуществления настоящего изобретения;
[42] на фиг. 28 представлено схематическое изображение другой фоточувствительной поверхности, не контактирующей с поверхностью детектируемого места, согласно вариантам осуществления настоящего изобретения;
[43] на фиг. 29 представлено схематическое изображение еще одной фоточувствительной поверхности, не контактирующей с поверхностью детектируемого места, согласно вариантам осуществления настоящего изобретения;
[44] на фиг. 30 представлено другое схематическое изображение экранирования интерференционного света согласно вариантам осуществления настоящего изобретения;
[45] на фиг. 31 представлено еще одно схематическое изображение экранирования интерференционного света согласно вариантам осуществления настоящего изобретения;
[46] на фиг. 32 представлено схематическое структурное изображение устройства неинвазивного детектирования для элемента ткани согласно вариантам осуществления настоящего изобретения;
[47] на фиг. 33 представлено схематическое структурное изображение датчика интенсивности света согласно вариантам осуществления настоящего изобретения;
[48] на фиг. 34 представлено схематическое структурное изображение генератора кольцевого луча согласно вариантам осуществления настоящего изобретения;
[49] на фиг. 35 представлено другое схематическое изображение экранирования интерференционного света согласно вариантам осуществления настоящего изобретения;
[50] на фиг. 36 представлено схематическое структурное изображение носимого устройства согласно вариантам осуществления настоящего изобретения; и
[51] на фиг. 37 представлено схематическое структурное изображение системы неинвазивного детектирования для элемента ткани согласно вариантам осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[52] Варианты осуществления настоящего изобретения далее будут описаны со ссылкой на сопроводительные графические материалы.
[53] В процессе достижения концепции настоящего изобретения автор изобретения обнаружил, что опорное расстояние и расстояние измерения могут изменяться в зависимости от длины волны, изменяться в зависимости от детектируемых объектов и изменяться в зависимости от детектируемых мест. Если опорное расстояние и расстояние измерения, соответствующие каждой предварительно определенной длине волны, определены для детектируемого места детектируемого объекта, то требуется предусмотреть фоточувствительные поверхности на различных расстояниях от источника до детектора от центра падающего луча, что выдвигает высокие требования к уровню производительности фотоэлектрического детектора, или, что зависит от уровня производительности фотоэлектрического детектора. Однако, ограниченный текущим уровнем производства фотоэлектрического детектора, трудно предусмотреть светочувствительные поверхности на различных расстояниях от источника до детектора от центра падающего луча. Фоточувствительные поверхности могут быть предусмотрены только на ограниченном количестве расстояний от источника до детектора в соответствии со средним параметром для многих детектируемых объектов. В результате трудно точно определить опорное расстояние и расстояние измерения, соответствующие каждой предварительно определенной длине волны для детектируемого места детектируемого объекта с использованием соответствующей области техники, и, таким образом, точность детектирования не является высокой.
[54] Для повышения точности детектирования необходимо точно определить опорное расстояние и/или расстояние измерения. Для решения этой проблемы автор изобретения предлагает решение в виде изменения расположения источника света и фоточувствительной поверхности, которое будет описано ниже со ссылкой на конкретные варианты осуществления.
[55] На фиг. 1 представлена блок-схема способа определения расстояния при неинвазивном детектировании элемента ткани согласно вариантам осуществления настоящего изобретения. Данные варианты осуществления могут быть применены для повышения точности детектирования концентрации детектируемого элемента ткани.
[56] Как показано на фиг. 1, способ включает операции S110–S120.
[57] В операции S110 первое значение интенсивности света, соответствующее каждой предварительно определенной длине волны из по меньшей мере одной предварительно определенной длины волны на каждом расстоянии от источника до детектора из по меньшей мере двух расстояний от источника до детектора, получают для детектируемого места детектируемого объекта.
[58] Согласно вариантам осуществления настоящего изобретения расстояние от источника до детектора может представлять собой расстояние между источником света и положением излучения. Источник света здесь следует понимать как световой луч, сформированный на поверхности детектируемого места, а положение излучения может представлять положение, в котором излучается значение интенсивности света. Значение интенсивности света излучается с поверхности детектируемого места после прохождения светового луча через детектируемое место. Следует отметить, что значение интенсивности света, описанное в вариантах осуществления настоящего изобретения, относится к значению интенсивности диффузно-отраженного света, а значение интенсивности света, используемое для определения расстояния измерения и опорного расстояния в вариантах осуществления настоящего изобретения, является первым значением интенсивности света. Также следует отметить, что, если фоточувствительная поверхность расположена в соответствии с положением излучения, расстояние от источника до детектора может представлять собой расстояние между источником света и фоточувствительной поверхностью. Фоточувствительная поверхность здесь может быть в контакте с детектируемым местом или может не быть в контакте с детектируемым местом, что может быть предусмотрено в соответствии с фактическими ситуациями и конкретно не ограничено здесь. Фоточувствительная поверхность может быть использована для получения значения интенсивности света, излучаемого с поверхности детектируемого места.
[59] Для детектируемого места детектируемого объекта может быть получено по меньшей мере одно первое значение интенсивности света, соответствующее каждой предварительно определенной длине волны на каждом расстоянии от источника до детектора. То есть, когда детектируемое место детектируемого объекта определено, для каждой предварительно определенной длины волны получают по меньшей мере одно первое значение интенсивности света для каждой предварительно определенной длины волны на каждом расстоянии от источника до детектора. Каждое первое значение интенсивности света здесь может быть первым значением интенсивности света, полученным посредством испытания in vivo, первым значением интенсивности света, полученным посредством моделирования методом Монте-Карло, или первым значением интенсивности света, полученным посредством испытания in vitro. Разные первые значения интенсивности света для одной и той же предварительно определенной длины волны на одном и том же расстоянии от источника до детектора соответствуют разным концентрациям детектируемого элемента ткани. То есть получают по меньшей мере одно первое значение интенсивности света для одной и той же предварительно определенной длины волны на одном и том же расстоянии от источника до детектора, а разные первые значения интенсивности света соответствуют разным концентрациям детектируемого элемента ткани.
[60] Если каждое первое значение интенсивности света является первым значением интенсивности света, полученным посредством испытания in vivo, или первым значением интенсивности света, полученным посредством испытания in vitro, тогда получение первого значения интенсивности света, соответствующего каждой предварительно определенной длине волны на каждом расстоянии от источника до детектора для детектируемого места детектируемого объекта, может быть понято следующим образом. Для детектируемого места детектируемого объекта по меньшей мере два целевых кольцевых луча, соответствующих каждой предварительно определенной длине волны, сформированы на поверхности детектируемого места, разные целевые кольцевые лучи имеют разные расстояния от источника до детектора, каждое расстояние от источника до детектора является внутренним радиусом или внешним радиусом целевого кольцевого луча, а разные целевые кольцевые лучи имеют один и тот же геометрический центр. По меньшей мере одно первое значение интенсивности света, излучаемое с поверхности детектируемого места после прохождения каждого целевого кольцевого луча через детектируемое место, получают на основе фоточувствительной поверхности, соответствующей геометрическому центру. Следует отметить, что, если детектируемым элементом ткани является глюкоза в крови, вышеупомянутое испытание in vivo может включать OGTT (пероральный тест на толерантность к глюкозе).
[61] Если каждое первое значение интенсивности света является первым значением интенсивности света, полученным посредством моделирования методом Монте-Карло, тогда получение первого значения интенсивности света, соответствующего каждой предварительно определенной длине волны на каждом расстоянии от источника до детектора для детектируемого места детектируемого объекта, может быть понято следующим образом. Оптический параметр ткани и параметр структуры кожи для каждой предварительно определенной длины волны в трехслойной модели кожной ткани получают для детектируемого места детектируемого объекта. На основе моделирования методом Монте-Карло первое значение интенсивности света, соответствующее каждой предварительно определенной длине волны на каждом расстоянии от источника до детектора, определяют в соответствии с каждым оптическим параметром ткани, каждым параметром структуры кожной ткани, взаимосвязью изменения оптического параметра ткани, вызванной изменением концентрации детектируемого элемента ткани, по меньшей мере двумя предварительно определенными расстояниями от источника до детектора и предварительно определенным количеством падающих фотонов. Моделирование методом Монте-Карло может обеспечить моделирование пути распространения оптического излучения случайного рассеяния в биологической ткани, и может быть получено пространственное распределение значения интенсивности диффузно-рассеянного света и распределение поглощенной части фотона в ткани. Трехслойная модель кожной ткани может быть понята как включающая эпидермис, дерму и подкожную клетчатку. Оптический параметр ткани может включать коэффициент поглощения, коэффициент рассеяния, коэффициент анизотропии и средний показатель преломления каждого слоя кожи. Параметр структуры кожной ткани может быть понят как толщина каждого слоя кожной ткани, то есть толщина эпидермиса, толщина дермы и толщина подкожной клетчатки. Взаимосвязь изменения оптического параметра ткани, вызванная изменением концентрации детектируемого элемента ткани, может включать взаимосвязь изменения коэффициента поглощения, вызванную изменением концентрации детектируемого элемента ткани, и уменьшенную взаимосвязь изменения коэффициента рассеяния, вызванную изменением концентрации детектируемого элемента ткани. Детектируемый элемент ткани может включать глюкозу в крови, жир, белые кровяные клетки и т. д.
[62] В операции S120 первое измеренное значение интенсивности света и/или первое опорное значение интенсивности света определены из первых значений интенсивности света, соответствующих предварительно определенной длине волны, в соответствии с абсолютным значением разности интенсивности света, вызванной изменением концентрации детектируемого элемента ткани, расстояние от источника до детектора, соответствующее первому измеренному значению интенсивности света, определено в качестве расстояния измерения, и расстояние от источника до детектора, соответствующее первому опорному значению интенсивности света, определено в качестве опорного расстояния. Первое измеренное значение интенсивности света представляет собой первое значение интенсивности света, соответствующее наибольшему абсолютному значению разности интенсивности света, вызванной изменением концентрации детектируемого элемента ткани. Первое опорное значение интенсивности света представляет собой первое значение интенсивности света, соответствующее наименьшему абсолютному значению разности интенсивности света, вызванной изменением концентрации детектируемого элемента ткани. Разность интенсивности света, вызванная изменением концентрации детектируемого элемента ткани, представляет собой разность между первым значением интенсивности света и соответствующим предварительно определенным значением интенсивности света.
[63] Согласно вариантам осуществления настоящего изобретения расстояние измерения представляет собой расстояние от источника до детектора, соответствующее положению излучения, где излучается значение интенсивности диффузно-рассеянного света, имеющее наибольшую чувствительность к изменению концентрации детектируемого элемента ткани, и опорное расстояние представляет собой расстояние от источника до детектора, соответствующее положению излучения, где излучается значение интенсивности диффузно-рассеянного света, имеющее нулевую чувствительность к изменению концентрации детектируемого элемента ткани, где чувствительность значения интенсивности диффузно-рассеянного света к изменению концентрации детектируемого элемента ткани представляет собой отношение разности интенсивности света к изменению концентрации детектируемого элемента ткани. Таким образом, когда разность концентрации детектируемого элемента ткани определена, расстояние измерения представляет собой расстояние от источника до детектора, соответствующее положению излучения, где излучается разность интенсивности света с наибольшим абсолютным значением, и опорное расстояние представляет собой расстояние от источника до детектора, соответствующее положению излучения, где излучается разность интенсивности света с наименьшим абсолютным значением. Вышеупомянутое значение интенсивности диффузно-отраженного света является первым значением интенсивности света.
[64] На основе вышесказанного, первое измеренное значение интенсивности света и/или первое опорное значение интенсивности света могут быть определены из первых значений интенсивности света, соответствующих предварительно определенной длине волны, в соответствии с абсолютным значением разности интенсивности света, вызванной изменением концентрации детектируемого элемента ткани. Расстояние от источника до детектора, соответствующее первому измеренному значению интенсивности света, определено в качестве расстояния измерения, а расстояние от источника до детектора, соответствующее первому опорному значению интенсивности света, определено в качестве опорного расстояния. Первое измеренное значение интенсивности света представляет собой первое значение интенсивности света, соответствующее наибольшему абсолютному значению разности интенсивности света, вызванной изменением концентрации детектируемого элемента ткани. Первое опорное значение интенсивности света представляет собой первое значение интенсивности света, соответствующее наименьшему абсолютному значению разности интенсивности света, вызванной изменением концентрации детектируемого элемента ткани. Разность интенсивности света, вызванная изменением концентрации детектируемого элемента ткани, представляет собой разность между первым значением интенсивности света и соответствующим предварительно определенным значением интенсивности света. Каждое предварительно определенное значение интенсивности света следует понимать как значение интенсивности света, излучаемое с поверхности детектируемого места, когда концентрация детектируемого элемента ткани равна предварительно определенной концентрации. Если каждое первое значение интенсивности света является первым значением интенсивности света, полученным посредством испытания in vivo, то каждое предварительно определенное значение интенсивности света может быть значением интенсивности света, полученным, когда детектируемый объект находится в состоянии голодания. Если каждое первое значение интенсивности света является первым значением интенсивности света, полученным посредством моделирования методом Монте-Карло или первым значением интенсивности света, полученным посредством испытания in vitro, тогда каждое предварительно определенное значение интенсивности света может быть значением интенсивности света, излучаемым с поверхности детектируемого места, когда предварительно определенная концентрация равна нулю.
[65] Согласно вариантам осуществления настоящего изобретения определение первого измеренного значения интенсивности света и/или первого опорного значения интенсивности света из первых значений интенсивности света, соответствующих предварительно определенной длине волны, в соответствии с абсолютным значением разности интенсивности света, вызванной изменением концентрации детектируемого элемента ткани, может быть понято следующим образом. Для каждой предварительно определенной длины волны первое измеренное значение интенсивности света может быть определенно из первых значений интенсивности света, соответствующих предварительно определенной длине волны. В качестве альтернативы первое измеренное значение интенсивности света и первое опорное значение интенсивности света могут быть определенны из первых значений интенсивности света, соответствующих предварительно определенной длине волны. В качестве альтернативы первое опорное значение интенсивности света может быть определенно из первых значений интенсивности света, соответствующих предварительно определенной длине волны. Можно понять, что по меньшей мере для одной предварительно определенной длины волны могут быть следующие случаи.
[66] В первом случае определяют только первое измеренное значение интенсивности света, соответствующее каждой предварительно определенной длине волны. Во втором случае определяют первое измеренное значение интенсивности света и первое опорное значение интенсивности света, соответствующие каждой предварительно определенной длине волны. В третьем случае определяют по меньшей мере одно первое измеренное значение интенсивности света, соответствующее по меньшей мере одной предварительно определенной длине волны среди предварительно определенных длин волн, и по меньшей мере одно первое опорное значение интенсивности света, соответствующее по меньшей мере одной другой предварительно определенной длине волны среди предварительно определенных длин волн. В четвертом случае определяют по меньшей мере одно первое измеренное значение интенсивности света и по меньшей мере одно первое опорное значение интенсивности света, соответствующие по меньшей мере одной предварительно определенной длине волны среди предварительно определенных длин волн, и определяют по меньшей мере одно первое опорное значение интенсивности света, соответствующее по меньшей мере одной другой предварительно определенной длине волны среди предварительно определенных длин волн. В пятом случае определяют по меньшей мере одно первое измеренное значение интенсивности света и по меньшей мере одно первое опорное значение интенсивности света, соответствующие по меньшей мере одной предварительно определенной длине волны среди предварительно определенных длин волн, и определяют по меньшей мере одно первое измеренное значение интенсивности света, соответствующее по меньшей мере одной другой предварительно определенной длине волны среди предварительно определенных длин волн.
[67] На основании этого, с точки зрения расстояния измерения и опорного расстояния по меньшей мере для одной предварительно определенной длины волны могут быть следующие случаи. В первом случае определяют только расстояние измерения, соответствующее каждой предварительно определенной длине волны. Во втором случае определяют расстояние измерения и опорное расстояние, соответствующие каждой предварительно определенной длине волны. В третьем случае определяют по меньшей мере одно расстояние измерения, соответствующее по меньшей мере одной предварительно определенной длине волны среди предварительно определенных длин волн, и по меньшей мере одно опорное расстояние, соответствующее по меньшей мере одной другой предварительно определенной длине волны среди предварительно определенных длин волн. В четвертом случае определяют по меньшей мере одно расстояние измерения и по меньшей мере одно опорное расстояние, соответствующие по меньшей мере одной предварительно определенной длине волны среди предварительно определенных длин волн, и определяют по меньшей мере одно опорное расстояние, соответствующее по меньшей мере одной другой предварительно определенной длине волны среди предварительно определенной длины волны. В пятом случае определяют по меньшей мере одно расстояние измерения и по меньшей мере одно опорное расстояние, соответствующие по меньшей мере одной предварительно определенной длине волны среди предварительно определенных длин волн, и определяют по меньшей мере одно расстояние измерения, соответствующее по меньшей мере одной другой предварительно определенной длине волны среди предварительно определенных длин волн. Для каждой предварительно определенной длины волны определение расстояния измерения и/или опорного расстояния, соответствующие предварительно определенной длине волны, может быть установлено согласно фактическим ситуациям, которые конкретно не ограничены здесь.
[68] Например, 









[69] Когда концентрация детектируемого элемента ткани равна 











[70] Согласно техническому решению вариантов осуществления настоящего изобретения, поскольку первое значение интенсивности света, соответствующее каждой предварительно определенной длине волны на каждом расстоянии от источника до детектора, может быть получено для детектируемого места детектируемого объекта, первое измеренное значение интенсивности света и/или первое опорное значение интенсивности света могут быть точно определены, и затем расстояние измерения и/или опорное расстояние могут быть точно определены. На основании этого точное детектирование расстояния измерения и/или опорного расстояния предоставляет основание для определения концентрации детектируемого элемента ткани, тем самым повышая точность детектирования.
[71] Согласно вариантам осуществления настоящего изобретения операция 110 может включать следующие операции. Для детектируемого места детектируемого объекта по меньшей мере два целевых кольцевых луча, соответствующих каждой предварительно определенной длине волны, сформированы на поверхности детектируемого места. Разные целевые кольцевые лучи имеют разные расстояния от источника до детектора, каждое расстояние от источника до детектора является внутренним радиусом или внешним радиусом целевого кольцевого луча, а разные целевые кольцевые лучи имеют один и тот же геометрический центр. Первое значение интенсивности света, излучаемое с поверхности детектируемого места после прохождения каждого целевого кольцевого луча через детектируемое место, получают на основе фоточувствительной поверхности, соответствующей геометрическому центру.
[72] Согласно вариантам осуществления настоящего изобретения для точного определения расстояния измерения и опорного расстояния динамические целевые кольцевые лучи с переменным размером могут быть падающими, фоточувствительная поверхность предусмотрена в положении, соответствующем центру целевых кольцевых лучей, а разные целевые кольцевые лучи могут иметь один и тот же геометрический центр. Разные целевые кольцевые лучи имеют разные размеры, каждый размер включает размеры в виде внутреннего радиуса и внешнего радиуса, а фоточувствительная поверхность расположена в положении, соответствующем центру каждого целевого кольцевого луча. Таким образом, каждое первое значение интенсивности света, принимаемое фоточувствительной поверхностью, является первым значением интенсивности света, генерируемым после того, как соответствующий целевой кольцевой луч падает и проходит через соответствующий путь прохождения. Фоточувствительная поверхность и целевой кольцевой луч каждого размера могут также соответствовать одному расстоянию от источника до детектора.
[73] Согласно вариантам осуществления настоящего изобретения, поскольку расстояние измерения и опорное расстояние могут изменяться в зависимости от длины волны, изменяться в зависимости от детектируемых объектов и изменяться в зависимости от детектируемых мест, тогда для детектируемых мест детектируемого объекта первые значения интенсивности света, соответствующие каждой предварительно определенной длине волны, могут быть получены вышеупомянутым способом, так что опорное расстояние и/или расстояние измерения, соответствующее каждой предварительно определенной длине волны, могут быть точно определены для детектируемых мест детектируемого объекта.
[74] Согласно вариантам осуществления настоящего изобретения, вышеупомянутые способы излучения и приема целевого кольцевого луча и фоточувствительной поверхности могут значительно снизить требования к фотоэлектрическому детектору, тем самым снижая производственные затраты и упрощая реализацию. Кроме того, может быть достигнуто непрерывное детектирование. Так называемое непрерывное детектирование может быть понято как непрерывность расстояния от источника до детектора.
[75] На основе вышесказанного реализация заключается в следующем. Для детектируемого места детектируемого объекта целевые кольцевые лучи разных размеров, соответствующие каждой предварительно определенной длине волны, сформированы на поверхности детектируемого места, а фоточувствительная поверхность предусмотрена в положении, соответствующем центру каждого целевого кольцевого луча. По меньшей мере одно первое значение интенсивности света, излучаемое с поверхности детектируемого места после прохождения каждого целевого кольцевого луча через детектируемое место, принимают на основе фоточувствительной поверхности. Целевые кольцевые лучи могут быть сформированы на поверхности детектируемого места с тем же геометрическим центром. Следует отметить, что разные целевые кольцевые лучи имеют разные внутренние и внешние радиусы. Как внутренний радиус, так и внешний радиус относятся к радиусу. Размер каждого целевого кольцевого луча может быть установлен согласно фактическим ситуациям, которые конкретно не ограничены здесь. Разные первые значения интенсивности света для одного и того же целевого кольцевого луча, соответствующие предварительно определенной длине волны, соответствуют разным концентрациям детектируемого элемента ткани. То есть получают по меньшей мере одно первое значение интенсивности света для одного и того же целевого кольцевого луча, соответствующее одной и той же предварительно определенной длине волны, а разные первые значения интенсивности света соответствуют разным концентрациям детектируемого элемента ткани. Кроме того, разные целевые кольцевые лучи могут иметь одинаковую или различную ширину колец, которая может быть установлена согласно фактическим ситуациям и конкретно не ограничена здесь. Ширина кольца каждого целевого кольцевого луча может быть понята как разница между внешним радиусом целевого кольцевого луча и внутренним радиусом целевого кольцевого луча. Каждый целевой кольцевой луч может быть сформирован точечным сканированием светового пятна или проекцией луча. Разные предварительно определенные длины волн могут соответствовать одному и тому же целевому кольцевому лучу или разным целевым кольцевым лучам, которые могут быть установлены согласно фактическим ситуациям и конкретно не ограничены здесь.
[76] Например, на фиг. 2 представлено схематическое изображение целевых кольцевых лучей, сформированных на поверхности детектируемого места согласно вариантам осуществления настоящего изобретения. Для детектируемого места детектируемого объекта 


[77] Кроме того, первые значения интенсивности света, соответствующие каждой предварительно определенной длине волны, могут быть приняты двумя способами. В первом способе первые значения интенсивности света получают согласно предварительно определенной длине волны. То есть для каждой предварительно определенной длины волны множество целевых кольцевых лучей сформированы на поверхности детектируемого места, и когда сформирован каждый целевой кольцевой луч, первое значение интенсивности света, излучаемое с поверхности детектируемого места после прохождения целевого кольцевого луча через детектируемое место, принимают в центре целевого кольцевого луча на основе фоточувствительной поверхности, таким образом, может быть получено первое значение интенсивности света, соответствующее каждому целевому кольцевому лучу для предварительно определенной длины волны. Таким же образом может быть получено первое значение интенсивности света, соответствующее каждому целевому кольцевому лучу для каждой предварительно определенной длины волны. Во втором способе первые значения интенсивности света получают согласно целевым кольцевым лучам. То есть целевые кольцевые лучи одинакового размера, соответствующие разным предварительно определенным длинам волн, последовательно сформированы на поверхности детектируемого места. Когда сформирован целевой кольцевой луч одинакового размера, соответствующий каждой предварительно определенной длине волны, первое значение интенсивности света, излучаемое с поверхности детектируемого места после прохождения целевого кольцевого луча одинакового размера через детектируемое место, получают в центре целевого кольцевого луча на основе фоточувствительной поверхности. Таким образом, могут быть получены первые значения интенсивности света, соответствующие целевым кольцевым лучам одинакового размера для предварительно определенных длин волн. Таким же образом, могут быть получены первые значения интенсивности света, соответственно соответствующие целевым кольцевым лучам разных размеров для предварительно определенных длин волн.
[78] Согласно вариантам осуществления настоящего изобретения, поскольку первое значение интенсивности света, соответствующее каждой предварительно определенной длине волны на каждом расстоянии от источника до детектора, может быть получено путем регулировки размера целевого кольцевого луча, первое измеренное значение интенсивности света и первое опорное значение интенсивности света могут быть точно определены, и затем расстояние измерения и опорное расстояние могут быть точно определены. Кроме того, способы излучения и приема целевого кольцевого луча и фоточувствительной поверхности могут значительно снизить требования к фотоэлектрическому детектору, тем самым снижая производственные затраты и упрощая реализацию. Кроме того, может быть достигнуто непрерывное детектирование.
[79] Согласно вариантам осуществления настоящего изобретения каждый целевой кольцевой луч может быть сформирован точечным сканированием светового пятна или проекцией луча.
[80] Согласно вариантам осуществления настоящего изобретения каждый целевой кольцевой луч может быть сформирован двумя способами. Первый способ представляет собой точечное сканирование светового пятна, а второй способ – проекцию луча. Для первого способа на фиг. 4 представлено схематическое изображение формирования целевого кольцевого луча точечным сканированием светового пятна согласно вариантам осуществления настоящего изобретения. Для второго способа на фиг. 5 представлено схематическое изображение формирования целевого кольцевого луча с помощью проекции луча согласно вариантам осуществления настоящего изобретения.
[81] Согласно вариантам осуществления настоящего изобретения фоточувствительная поверхность находится в контакте или не находится в контакте с поверхностью детектируемого места.
[82] Согласно вариантам осуществления настоящего изобретения форма неинвазивного детектирования элемента ткани может включать контактное детектирование и бесконтактное детектирование. Контактное детектирование может препятствовать приему фоточувствительной поверхностью интерференционного света, тем самым дополнительно повышая точность детектирования. Бесконтактное детектирование может избежать влияния мешающих факторов, таких как температура и давление, на изменение значения интенсивности света, тем самым дополнительно повышая точность детектирования.
[83] Если фоточувствительная поверхность расположена в контакте с поверхностью детектируемого места, то можно считать, что неинвазивное детектирование элемента ткани является контактным детектированием. Можно понять, что вышеуказанное может препятствовать приему фоточувствительной поверхностью интерференционного света, тем самым дополнительно повышая точность детектирования.
[84] Если фоточувствительная поверхность расположена в контакте с поверхностью детектируемого места, то форма неинвазивного детектирования элемента ткани может быть определена в соответствии с тем, получено ли фоточувствительной поверхностью первое значение интенсивности света через световодную часть, и находится ли световодная часть в контакте с поверхностью детектируемого места, если первое значение интенсивности света получено через световодную часть. Световодная часть содержит первый конец световодной части и второй конец световодной части. Расстояние между первым концом световодной части и поверхностью детектируемого места больше, чем расстояние между вторым концом световодной части и поверхностью детектируемого места. Первый конец световодной части и второй конец световодной части являются противоположными торцами. Второй конец световодной части находится в контакте или не находится в контакте с поверхностью детектируемого места. Второй конец световодной части является входом светового луча, то есть световой луч, который испускается после того, как целевой кольцевой луч проходит через поверхность детектируемого места, может входить в световодную часть через второй конец световодной части и может быть передан на первый конец световодной части.
[85] Согласно вариантам осуществления настоящего изобретения, если фоточувствительная поверхность не находится в контакте с поверхностью детектируемого места, и фоточувствительная поверхность не получает первое значение интенсивности света через световодную часть, то форма неинвазивного детектирования элемента ткани может быть рассмотрена как бесконтактное детектирование. Если первое значение интенсивности света получено фоточувствительной поверхностью через световодную часть, то фоточувствительная поверхность должна быть расположена на первом конце световодной части, чтобы достичь отсутствия контакта между фоточувствительной поверхностью и поверхностью детектируемого места. На основании этого, форму неинвазивного детектирования элемента ткани определяют в соответствии с тем, находится ли второй конец световодной части в контакте с поверхностью детектируемого места. То есть, если второй конец световодной части находится в контакте с поверхностью детектируемого места, то можно считать, что формой неинвазивного детектирования элемента ткани является контактное детектирование. Если второй конец световодной части не находится в контакте с поверхностью детектируемого места, то можно считать, что формой неинвазивного детектирования элемента ткани является бесконтактное детектирование.
[86] Подводя итог, контактное детектирование может включать следующие два способа. В первом способе фоточувствительная поверхность находится в контакте с поверхностью детектируемого места, как показано на фиг. 6. На фиг. 6 представлено другое схематическое изображение получения первого значения интенсивности света на основе фоточувствительной поверхности согласно вариантам осуществления настоящего изобретения. На фиг. 6 фоточувствительная поверхность находится в контакте с поверхностью детектируемого места. Во втором способе фоточувствительная поверхность расположена на первом конце световодной части, а второй конец световодной части находится в контакте с поверхностью детектируемого места, как показано на фиг. 7. На фиг. 7 представлено еще одно схематическое изображение получения первого значения интенсивности света на основе фоточувствительной поверхности согласно вариантам осуществления настоящего изобретения. На фиг. 7 второй конец световодной части находится в контакте с поверхностью детектируемого места.
[87] Бесконтактное детектирование может включать следующие два способа. В первом способе фоточувствительная поверхность не находится в контакте с поверхностью детектируемого места и фоточувствительная поверхность не получает первое значение интенсивности света через световодную часть, как показано на фиг. 3. Во втором способе фоточувствительная поверхность расположена на первом конце световодной части, а второй конец световодной части не находится в контакте с поверхностью детектируемого места, как показано на фиг. 8. На фиг. 8 представлено другое схематическое изображение получения первого значения интенсивности света на основе фоточувствительной поверхности согласно вариантам осуществления настоящего изобретения. На фиг. 8 второй конец световодной части не находится в контакте с поверхностью детектируемого места.
[88] Согласно вариантам осуществления настоящего изобретения отсутствие контакта между фоточувствительной поверхностью и поверхностью детектируемого места может быть достигнуто путем расположения фоточувствительной поверхности на первом конце световодной части, второй конец световодной части находится в контакте или не находится в контакте с поверхностью детектируемого места, а первый конец световодной части и второй конец световодной части являются противоположными торцами.
[89] Согласно вариантам осуществления настоящего изобретения, чтобы достичь отсутствия контакта между фоточувствительной поверхностью и поверхностью детектируемого места, фоточувствительная поверхность может быть расположена на первом конце световодной части. Первый конец световодной части не находится в контакте с поверхностью детектируемого места, то есть фоточувствительная поверхность может быть расположена на первом торце световодной части, не находясь в контакте с поверхностью детектируемого места. Второй конец световодной части, противоположный первому концу световодной части, может находиться в контакте с поверхностью детектируемого места, или может не находиться в контакте с поверхностью детектируемого места, который может быть установлен согласно фактическим ситуациям и конкретно не ограничен здесь. Если фоточувствительная поверхность расположена на первом конце световодной части, а второй конец световодной части находится в контакте с поверхностью детектируемого места, то можно считать, что формой неинвазивного детектирования элемента ткани является контактное детектирование, как показано на фиг. 7. Если фоточувствительная поверхность расположена на первом конце световодной части, а второй конец световодной части не находится в контакте с поверхностью детектируемого места, то можно считать, что формой неинвазивного детектирования элемента ткани является бесконтактное детектирование, как показано на фиг. 8.
[90] Согласно вариантам осуществления настоящего изобретения фоточувствительная поверхность не находится в контакте с поверхностью детектируемого места. Перед получением первого значения интенсивности света, которое излучается с поверхности детектируемого места после прохождения каждого целевого кольцевого луча через детектируемое место, на основе фоточувствительной поверхности, соответствующей геометрическому центру, способ может дополнительно включать операцию экранирования интерференционного света
[91] Согласно вариантам осуществления настоящего изобретения после передачи целевого кольцевого луча на детектируемое место, часть целевого кольцевого луча может быть непосредственно отражена на поверхности детектируемого места для формирования света, отраженного от поверхности, и часть целевого кольцевого луча проходит через детектируемое место, а диффузно-рассеянный свет (т. е. первое значение интенсивности света) излучается с поверхности детектируемого места. Свет, отраженный от поверхности, не взаимодействует с тканью и, следовательно, может не нести достоверной информации. Достоверная информация может быть понята как отклик, вызванный изменением концентрации детектируемого элемента ткани в процессе детектирования. Следовательно, свет, отраженный от поверхности, может быть рассмотрен как интерференционный свет. Диффузно-рассеянный свет взаимодействует с кожной тканью и несет достоверную информацию, и, таким образом, может быть рассмотрен как достоверный свет.
[92] Если фоточувствительная поверхность не находится в контакте с поверхностью детектируемого места, то может быть сгенерирован свет, отраженный от поверхности. На основе этого для дополнительного повышения точности детектирования, интерференционный свет может быть экранирован до получения первого значения интенсивности света, излучаемого с поверхности детектируемого места, после прохождения каждого целевого кольцевого луча через детектируемое место на основе фоточувствительной поверхности, соответствующей геометрическому центру, таким образом, первое значение интенсивности света, излучаемое с поверхности детектируемого места после прохождения каждого целевого кольцевого луча через детектируемое место, получают на основе фоточувствительной поверхности. Интерференционный свет может быть экранирован следующими двумя способами.
[93] В первом способе, если фоточувствительная поверхность не находится в контакте с поверхностью детектируемого места и фоточувствительная поверхность не получает первое значение интенсивности света через световодную часть, первая часть, блокирующая свет, может быть предусмотрена в области зазора между фоточувствительной поверхностью и поверхностью детектируемого места, и первая часть, блокирующая свет, находится в контакте с поверхностью детектируемого места. Фоточувствительная поверхность расположена на внутренней стороне первой части, блокирующей свет. Первая часть, блокирующая свет, является неотъемлемой частью фоточувствительной поверхности, или первая часть, блокирующая свет, отделена от фоточувствительной поверхности, как показано на фиг. 9. На фиг. 9 представлено схематическое изображение экранирования интерференционного света согласно вариантам осуществления настоящего изобретения.
[94] Во втором способе, если фоточувствительная поверхность расположена на первом конце световодной части, а второй конец световодной части не находится в контакте с поверхностью детектируемого места, вторая часть, блокирующая свет, может быть предусмотрена в области зазора между световодной частью и поверхностью детектируемого места, первый конец второй части, блокирующей свет, находится в контакте со вторым концом световодной части, второй конец второй части, блокирующей свет, находится в контакте с поверхностью детектируемого места, а второй конец второй части, блокирующей свет, и первый конец второй части, блокирующей свет, являются противоположными торцами. Расстояние между первым концом второй части, блокирующей свет, и поверхностью детектируемого места больше, чем расстояние между вторым концом второй части, блокирующей свет, и поверхностью детектируемого места, как показано на фиг. 10. На фиг. 10 представлено другое схематическое изображение экранирования интерференционного света согласно вариантам осуществления настоящего изобретения.
[95] Согласно вариантам осуществления настоящего изобретения интерференционный свет экранируется перед получением первого значения интенсивности света, излучаемого с поверхности детектируемого места после прохождения каждого целевого кольцевого луча через детектируемое место, так что получается только диффузно-рассеянный свет. Поскольку диффузно-рассеянный свет несет достоверную информацию, точность детектирования может быть дополнительно повышена.
[96] На фиг. 11 представлена блок-схема другого способа определения расстояния при неинвазивном детектировании элемента ткани согласно вариантам осуществления настоящего изобретения. Такие варианты осуществления могут быть применены для повышения точности детектирования концентрации детектируемого элемента ткани.
[97] Как показано на фиг. 11, способ включает операции S210–S220.
[98] В операции S210 для детектируемого места детектируемого объекта по меньшей мере два целевых кольцевых луча, соответствующих каждой предварительно определенной длине волны, формируют на поверхности детектируемого места.
[99] Согласно вариантам осуществления настоящего изобретения разные целевые кольцевые лучи имеют разные расстояния от источника до детектора, каждое расстояние от источника до детектора является внутренним радиусом или внешним радиусом целевого кольцевого луча, а разные целевые кольцевые лучи имеют один и тот же геометрический центр. Предварительно определенная длина волны включает по меньшей мере одну предварительно определенную длину волны. Каждый целевой кольцевой луч сформирован точечным сканированием светового пятна или проекцией луча.
[100] В операции S220 первое значение интенсивности света, излучаемое с поверхности детектируемого места после прохождения каждого целевого кольцевого луча через детектируемое место, получают на основе фоточувствительной поверхности, соответствующей геометрическому центру.
[101] Согласно вариантам осуществления настоящего изобретения фоточувствительная поверхность находится в контакте или не находится в контакте с поверхностью детектируемого места. Отсутствие контакта между фоточувствительной поверхностью и поверхностью детектируемого места может быть достигнуто путем расположения фоточувствительной поверхности на первом конце световодной части, второй конец световодной части находится в контакте или не находится в контакте с поверхностью детектируемого места, а первый конец световодной части и второй конец световодной части являются противоположными торцами. Если фоточувствительная поверхность не находится в контакте с поверхностью детектируемого места, способ может дополнительно включать операцию экранирования интерференционного света до операции S220.
[102] В операции S230 первое измеренное значение интенсивности света и/или первое опорное значение интенсивности света определяют из первых значений интенсивности света, соответствующих предварительно определенной длине волны, в соответствии с абсолютным значением разности интенсивности света, вызванной изменением концентрации детектируемого элемента ткани, расстояние от источника до детектора, соответствующее первому измеренному значению интенсивности света, определяют в качестве расстояния измерения, и расстояние от источника до детектора, соответствующее первому опорному значению интенсивности света, определяют в качестве опорного расстояния.
[103] Согласно вариантам осуществления настоящего изобретения первое измеренное значение интенсивности света представляет собой первое значение интенсивности света, соответствующее наибольшему абсолютному значению разности интенсивности света, вызванной изменением концентрации детектируемого элемента ткани, и первое опорное значение интенсивности света представляет собой первое значение интенсивности света, соответствующее наименьшему абсолютному значению разности интенсивности света, вызванной изменением концентрации детектируемого элемента ткани. Разность интенсивности света, вызванная изменением концентрации детектируемого элемента ткани, представляет собой разность между первым значением интенсивности света и соответствующим предварительно определенным значением интенсивности света.
[104] Согласно техническому решению вариантов осуществления настоящего изобретения, поскольку первое значение интенсивности света, соответствующее каждой предварительно определенной длине волны на каждом расстоянии от источника до детектора, может быть получено путем регулировки размера целевого кольцевого луча, первое измеренное значение интенсивности света и/или первое опорное значение интенсивности света могут быть точно определены, и затем расстояние измерения и опорное расстояние могут быть точно определены. На основании этого, точное детектирование расстояния измерения и опорного расстояния предоставляет основание для определения концентрации детектируемого элемента ткани, тем самым повышая точность детектирования. Кроме того, способы излучения и приема целевого кольцевого луча и фоточувствительной поверхности могут значительно снизить требования к фотоэлектрическому детектору, тем самым снижая производственные затраты и упрощая реализацию, при этом обеспечивая непрерывное детектирование.
[105] На фиг. 12 представлена блок-схема еще одного способа определения расстояния при неинвазивном детектировании элемента ткани согласно вариантам осуществления настоящего изобретения. Такие варианты осуществления могут быть применены для повышения точности детектирования концентрации детектируемого элемента ткани.
[106] Как показано на фиг. 12, способ включает операции S310–S320.
[107] В операции S310 для детектируемого места детектируемого объекта получают оптический параметр ткани, соответствующий каждой предварительно определенной длине волны из по меньшей мере одной предварительно определенной длины волны, и взаимосвязь изменения оптического параметра ткани, вызванную изменением концентрации детектируемого элемента ткани.
[108] В операции S320 каждое расстояние измерения и/или каждое опорное расстояние определяют в соответствии с оптическим параметром ткани, соответствующим каждой предварительно определенной длине волны, и взаимосвязью изменения оптического параметра ткани, вызванной изменением концентрации детектируемого элемента ткани.
[109] Согласно вариантам осуществления настоящего изобретения ткани организма в организме человека можно упрощенно описать как сложную среду, состоящую из рассеивающего тела и рассеивающего фона, при попадании падающего луча в ткань могут происходить поглощение и рассеяние, поглощение может непосредственно вызывать ослабление энергии света, а рассеяние может влиять на распределение энергии света за счет изменения направления прохождения фотона, при этом значение интенсивности света диффузно-рассеянного света, излучаемого с поверхности детектируемого места, является следствием комбинированного воздействия поглощения и рассеяния. Поглощение и рассеяние могут быть отражены оптическим параметром ткани и изменением оптического параметра ткани, вызванным изменением концентрации детектируемого элемента ткани. Согласно вышеизложенному расстояние измерения и опорное расстояние определяют поглощением и рассеянием в разных случаях. Таким образом, для детектируемого места детектируемого объекта, чтобы получить расстояние измерения и опорное расстояние, соответствующие каждой предварительно определенной длине волны, могут быть получены оптический параметр ткани, соответствующий каждой предварительно определенной длине волны, и взаимосвязь изменения оптического параметра ткани, вызванная изменением концентрации детектируемого элемента ткани. Для оптического параметра ткани, соответствующего каждой предварительно определенной длине волны, и взаимосвязи изменения оптического параметра ткани, вызванной изменением концентрации детектируемого элемента ткани, может быть сделана ссылка на приведенное выше описание.
[110] После получения оптического параметра ткани, соответствующего каждой предварительно определенной длине волны, расстояние измерения и/или опорное расстояние, соответствующие каждой предварительно определенной длине волны, могут быть определены в соответствии с оптическим параметром ткани, соответствующим каждой предварительно определенной длине волны, и взаимосвязью изменения оптического параметра ткани, вызванной изменением концентрации детектируемого элемента ткани. То есть для каждой предварительно определенной длины волны расстояние измерения и/или опорное расстояние, соответствующие предварительно определенной длине волны, могут быть определены в соответствии с оптическим параметром ткани, соответствующим предварительно определенной длине волны, и взаимосвязью изменения оптического параметра ткани, вызванной изменением концентрации детектируемого элемента ткани. Расстояние измерения и/или опорное расстояние, соответствующие каждой предварительно определенной длине волны, могут быть определены в соответствии с оптическим параметром ткани, соответствующим каждой предварительно определенной длине волны, и взаимосвязью изменения оптического параметра ткани, вызванной изменением концентрации детектируемого элемента ткани, на основе теории плавающей системы координат. Следует отметить, что предпосылкой является то, что определяется детектируемое место детектируемого объекта. Другими словами, вышеупомянутые расстояние измерения и опорное расстояние, соответствующие каждой предварительно определенной длине волны, соответствуют детектируемому месту детектируемого объекта.
[111] Согласно вариантам осуществления настоящего изобретения соответствующие расстояние измерения и/или опорное расстояние могут быть определены посредством оптического параметра ткани и взаимосвязи изменения оптического параметра ткани, вызванной изменением концентрации детектируемого элемента ткани.
[112] На фиг. 13 представлена блок-схема способа неинвазивного детектирования для элемента ткани согласно вариантам осуществления настоящего изобретения. Такие варианты осуществления могут быть применены для повышения точности детектирования концентрации детектируемого элемента ткани.
[113] Как показано на фиг. 13, способ включает операции S410–S420.
[114] В операции S410 для детектируемого места детектируемого объекта получают второе измеренное значение интенсивности света, соответствующее каждой предварительно определенной длине волны по меньшей мере одной предварительно определенной длины волны на расстоянии измерения, и/или второе опорное значение интенсивности света, соответствующее каждой предварительно определенной длине волны из по меньшей мере одной предварительно определенной длины волны на опорном расстоянии. Каждое расстояние измерения и каждое опорное расстояние определены согласно способам определения расстояния при неинвазивном детектировании элемента ткани согласно вариантам осуществления настоящего изобретения.
[115] Согласно вариантам осуществления настоящего изобретения для определения концентрации детектируемого элемента ткани для детектируемого места детектируемого объекта может быть получено второе измеренное значение интенсивности света и/или второе опорное значение интенсивности света, соответствующие каждой предварительно определенной длине волны. Второе измеренное значение интенсивности света может быть вторым значением интенсивности света, соответствующим каждой предварительно определенной длине волны на расстоянии измерения. Второе опорное значение интенсивности света может быть вторым значением интенсивности света, соответствующим каждой предварительно определенной длине волны на опорном расстоянии. Следует отметить, что разные предварительно определенные длины волн могут соответствовать одному и тому же расстоянию измерения или разным расстояниям измерения, и разные предварительно определенные длины волн могут соответствовать одному и тому же опорному расстоянию или разным опорным расстояниям. Каждое расстояние измерения и каждое опорное расстояние могут быть определены согласно способам, описанным в вариантах осуществления настоящего изобретения, включая следующие два способа.
[116] В первом способе для детектируемого места детектируемого объекта каждое расстояние измерения и каждое опорное расстояние могут быть определены путем анализа для каждой предварительно определенной длины волны полученного по меньшей мере одного первого значения интенсивности света, соответствующего каждому расстоянию от источника до детектора. То есть для каждой предварительно определенной длины волны получают по меньшей мере одно первое значение интенсивности света, соответствующее каждому расстоянию от источника до детектора, и каждое первое значение интенсивности света анализируют, чтобы определить расстояние измерения и/или опорное расстояние, соответствующие предварительно определенной длине волны. Другими словами для детектируемого места детектируемого объекта получают по меньшей мере одно первое значение интенсивности света, соответствующее каждой предварительно определенной длине волны на каждом расстоянии от источника до детектора. Первое измеренное значение интенсивности света и/или первое опорное значение интенсивности света могут быть определены из первых значений интенсивности света, соответствующих предварительно определенной длине волны, в соответствии с абсолютным значением разности интенсивности света, вызванной изменением концентрации детектируемого элемента ткани, расстояние от источника до детектора, соответствующее первому измеренному значению интенсивности света, определено в качестве расстояния измерения, и расстояние от источника до детектора, соответствующее первому опорному значению интенсивности света, определено в качестве опорного расстояния. Получение по меньшей мере одного первого значения интенсивности света, соответствующего каждой предварительно определенной длине волны на каждом расстоянии от источника до детектора для детектируемого места детектируемого объекта, может быть понято следующим образом. В первом способе для детектируемого места детектируемого объекта по меньшей мере два целевых кольцевых луча, соответствующих каждой предварительно определенной длине волны, сформированы на поверхности детектируемого места, разные целевые кольцевые лучи соответствуют разным расстояниям от источника до детектора, каждое расстояние от источника до детектора является внутренним радиусом или внешним радиусом целевого кольцевого луча, а разные целевые кольцевые лучи имеют один и тот же геометрический центр. По меньшей мере одно первое значение интенсивности света, излучаемое с поверхности детектируемого места после прохождения каждого целевого кольцевого луча через детектируемое место, получают на основе фоточувствительной поверхности, соответствующей геометрическому центру. Во втором способе для детектируемого места детектируемого объекта получают оптический параметр ткани и параметр структуры кожи, соответствующие каждой предварительно определенной длине волны в трехслойной модели кожной ткани. На основе моделирования методом Монте-Карло первое значение интенсивности света, соответствующее каждой предварительно определенной длине волны на каждом расстоянии от источника до детектора, определяют в соответствии с каждым оптическим параметром ткани, каждым параметром структуры кожной ткани, взаимосвязью изменения оптического параметра ткани, вызванной изменением концентрации детектируемого элемента ткани, по меньшей мере двумя предварительно определенными расстояниями от источника до детектора и предварительно определенным количеством падающих фотонов.
[117] Во втором способе для детектируемого места детектируемого объекта получают оптический параметр ткани, соответствующий каждой предварительно определенной длине волны, и взаимосвязь изменения оптического параметра ткани, вызванную изменением концентрации детектируемого элемента ткани. Каждое расстояние измерения и/или каждое опорное расстояние могут быть определены в соответствии с оптическим параметром ткани для каждой предварительно определенной длины волны, и взаимосвязью изменения оптического параметра ткани, вызванной изменением концентрации детектируемого элемента ткани.
[118] Согласно вариантам осуществления настоящего изобретения получение второго измеренного значения интенсивности света, соответствующего каждой предварительно определенной длине волны на расстоянии измерения, и/или второго опорного значения интенсивности света, соответствующего каждой предварительно определенной длине волны на опорном расстоянии для детектируемого места детектируемого объекта, может быть понято следующим образом. Для каждой предварительно определенной длины волны может быть получено второе измеренное значение интенсивности света, соответствующее предварительно определенной длине волны на расстоянии измерения; или может быть получено второе опорное значение интенсивности света, соответствующее предварительно определенной длине волны на опорном расстоянии; или могут быть получены второе измеренное значение интенсивности света, соответствующее предварительно определенной длине волны на расстоянии измерения, и второе опорное значение интенсивности света, соответствующее предварительно определенной длине волны на опорном расстоянии. По меньшей мере для одной предварительно определенной длины волны могут быть следующие случаи.
[119] В первом случае получают только второе измеренное значение интенсивности света, соответствующее каждой предварительно определенной длине волны. Во втором случае получают второе измеренное значение интенсивности света и второе опорное значение интенсивности света, соответствующие каждой предварительно определенной длине волны. В третьем случае получают по меньшей мере одно второе измеренное значение интенсивности света, соответствующее по меньшей мере одной предварительно определенной длине волны среди предварительно определенных длин волн, и получают по меньшей мере одно второе опорное значение интенсивности света, соответствующее по меньшей мере одной другой предварительно определенной длине волны среди предварительно определенных длин волн. В четвертом случае получают по меньшей мере одно второе измеренное значение интенсивности света и по меньшей мере одно второе опорное значение интенсивности света, соответствующие по меньшей мере одной предварительно определенной длине волны среди предварительно определенных длин волн, и получают по меньшей мере одно второе опорное значение интенсивности света, соответствующее по меньшей мере одной другой предварительно определенной длине волны среди предварительно определенных длин волн. В пятом случае получают по меньшей мере одно второе измеренное значение интенсивности света и по меньшей мере одно второе опорное значение интенсивности света, соответствующие по меньшей мере одной предварительно определенной длине волны среди предварительно определенных длин волн, и получают по меньшей мере одно второе измеренное значение интенсивности света, соответствующее по меньшей мере одной другой предварительно определенной длине волны среди предварительно определенных длин волн. Для каждой предварительно определенной длины волны получение второго измеренного значения интенсивности света и/или второго опорного значения интенсивности света, соответствующих предварительно определенной длине волны, может быть установлено согласно фактическим ситуациям, которые конкретно не ограничены здесь.
[120] Согласно вариантам осуществления настоящего изобретения второе измеренное значение интенсивности света и/или второе опорное значение интенсивности света могут быть точно определены, а концентрация детектируемого элемента ткани может быть определена в соответствии с точно определенным вторым измеренным значением интенсивности света и/или вторым опорным значением интенсивности света, так что точность детектирования может быть улучшена.
[121] В операции S420 определяют концентрацию детектируемого элемента ткани согласно второму измеренному значению интенсивности света и/или второму опорному значению интенсивности света, соответствующим каждой предварительно определенной длине волны.
[122] Согласно вариантам осуществления настоящего изобретения после получения каждого значения интенсивности света, соответствующего каждой предварительно определенной длине волны, концентрация детектируемого элемента ткани может быть определена в соответствии со вторым измеренным значением интенсивности света и/или вторым опорным значением интенсивности света, соответствующим каждой предварительно определенной длине волны. То есть по меньшей мере для одной предварительно определенной длины волны могут быть следующие случаи.
[123] В первом случае получают только второе измеренное значение интенсивности света, соответствующее каждой предварительно определенной длине волны. В этом случае концентрация детектируемого элемента ткани может быть определена согласно второму измеренному значению интенсивности света, соответствующему каждой предварительно определенной длине волны.
[124] Во втором случае получают второе измеренное значение интенсивности света и второе опорное значение интенсивности света, соответствующие каждой предварительно определенной длине волны. В этом случае концентрация детектируемого элемента ткани может быть определена с использованием операции определения разности. То есть для каждой предварительно определенной длины волны выполнение операции определения разности между вторым измеренным значением интенсивности света и вторым опорным значением интенсивности света, соответствующих предварительно определенной длине волны, для получения значения разности интенсивности света. Концентрацию детектируемого элемента ткани определяют согласно значению разности интенсивности света, соответствующему каждой предварительно определенной длине волны. Операцию определения разности выполняют потому, что второе опорное значение интенсивности света, соответствующее опорному расстоянию, отражает отклик, вызванный помехой, отличный от изменения концентрации детектируемого элемента ткани в процессе детектирования, в то время как второе измеренное значение интенсивности света, соответствующее расстоянию измерения, отражает отклик детектируемого элемента ткани и отклик помехи, отличный от детектируемого элемента ткани. Таким образом, может быть использовано опорное измеренное значение, то есть второе опорное значение интенсивности света, соответствующее опорному расстоянию, может быть использовано для коррекции второго измеренного значения интенсивности света, соответствующего расстоянию измерения, чтобы в наибольшей степени устранить синфазные помехи, тем самым дополнительно повышая точность детектирования.
[125] В третьем случае получают по меньшей мере одно второе измеренное значение интенсивности света, соответствующее по меньшей мере одной предварительно определенной длине волны среди предварительно определенных длин волн, и получают по меньшей мере одно второе опорное значение интенсивности света, соответствующее по меньшей мере одной другой предварительно определенной длине волны среди предварительно определенных длин волн. В этом случае может быть определена концентрация детектируемого элемента ткани согласно по меньшей мере одному второму измеренному значению интенсивности света и по меньшей мере одному второму опорному значению интенсивности света, соответствующим соответствующей предварительно определенной длине волны (длинам волн).
[126] В четвертом случае получают по меньшей мере одно второе измеренное значение интенсивности света и по меньшей мере одно второе опорное значение интенсивности света, соответствующие по меньшей мере одной предварительно определенной длине волны среди предварительно определенных длин волн, и получают по меньшей мере одно второе опорное значение интенсивности света, соответствующее по меньшей мере одной другой предварительно определенной длине волны среди предварительно определенных длин волн. В этом случае концентрация детектируемого элемента ткани может быть определена с использованием операции определения разности. То есть для каждой предварительно определенной длины волны, соответствующей которой получают второе измеренное значение интенсивности света и второе опорное значение интенсивности света, выполняют операцию определения разности между вторым измеренным значением интенсивности света и вторым опорным значением интенсивности света, соответствующим предварительно определенной длине волны, для получения значения разности интенсивности света. Концентрация детектируемого элемента ткани определена согласно значению (значениям) разности интенсивности света, соответствующему по меньшей мере одной предварительно определенной длине волны среди предварительно определенных длин волн, и по меньшей мере одному второму опорному значению интенсивности света, соответствующему по меньшей мере одной другой предварительно определенной длине волны среди предварительно определенных длин волн. Таким образом, может быть использовано опорное измеренное значение, то есть второе опорное значение интенсивности света, соответствующее опорному расстоянию, может быть использовано для коррекции второго измеренного значения интенсивности света, соответствующего расстоянию измерения, чтобы в наибольшей степени устранить синфазные помехи, тем самым дополнительно повышая точность детектирования.
[127] В пятом случае получают по меньшей мере одно второе измеренное значение интенсивности света и по меньшей мере одно второе опорное значение интенсивности света, соответствующие по меньшей мере одной предварительно определенной длине волны среди предварительно определенных длин волн, и получают по меньшей мере одно второе измеренное значение интенсивности света, соответствующее по меньшей мере одной другой предварительно определенной длине волны среди предварительно определенных длин волн. В этом случае концентрация детектируемого элемента ткани может быть определена с использованием операции определения разности. То есть для каждой предварительно определенной длины волны, соответствующей которой получают второе измеренное значение интенсивности света и второе опорное значение интенсивности света, выполняют операцию определения разности между вторым измеренным значением интенсивности света и вторым опорным значением интенсивности света, соответствующим предварительно определенной длине волны, для получения значения разности интенсивности света. Концентрация детектируемого элемента ткани определена согласно значению (значениям) разности интенсивности света, соответствующему по меньшей мере одной предварительно определенной длине волны среди предварительно определенных длин волн, и по меньшей мере одному второму измеренному значению интенсивности света, соответствующему по меньшей мере одной другой предварительно определенной длине волны среди предварительно определенных длин волн. Таким образом, может быть использовано опорное измеренное значение, то есть второе опорное значение интенсивности света, соответствующее опорному расстоянию, может быть использовано для коррекции второго измеренного значения интенсивности света, соответствующего расстоянию измерения, чтобы в наибольшей степени устранить синфазные помехи, тем самым дополнительно повышая точность детектирования.
[128] Согласно техническому решению вариантов осуществления настоящего изобретения расстояние измерения и/или опорное расстояние, соответствующие каждой предварительно определенной длине волны, могут быть точно получены для детектируемого места детектируемого объекта. Таким образом, второе измеренное значение интенсивности света и/или второе опорное значение интенсивности света могут быть точно определены согласно точно определенным расстоянию измерения и/или опорному расстоянию. Поскольку концентрацию детектируемого элемента ткани определяют согласно точно определенным второму измеренному значению интенсивности света и/или второму опорному значению интенсивности света, точность детектирования может быть улучшена.
[129] Согласно вариантам осуществления настоящего изобретения операция 410 может быть выполнена следующим образом. Для детектируемого места детектируемого объекта измерительный кольцевой луч и/или опорный кольцевой луч, соответствующие каждой предварительно определенной длине волны, сформированы на поверхности детектируемого места. Внутренний радиус или внешний радиус каждого измерительного кольцевого луча является соответствующим расстоянием измерения, внутренний радиус или внешний радиус каждого опорного кольцевого луча является соответствующим опорным расстоянием, и каждый измерительный кольцевой луч и каждый опорный кольцевой луч имеют один и тот же геометрический центр. Второе измеренное значение интенсивности света, излучаемое с поверхности детектируемого места после прохождения каждого измерительного кольцевого луча через детектируемое место, получают на основе фоточувствительной поверхности, соответствующей геометрическому центру, и/или второе опорное значение интенсивности света, излучаемое с поверхности детектируемого места после прохождения каждого опорного кольцевого луча через детектируемое место, получают на основе фоточувствительной поверхности, соответствующей геометрическому центру.
[130] Согласно вариантам осуществления настоящего изобретения второе измеренное значение интенсивности света и/или второе опорное значение интенсивности света могут быть получены следующими способами. Для детектируемого места детектируемого объекта измерительный кольцевой луч и/или опорный кольцевой луч, соответствующие каждой предварительно определенной длине волны, могут быть сформированы на поверхности детектируемого места. То есть, когда детектируемое место детектируемого объекта определено, измерительный кольцевой луч и/или опорный кольцевой луч, соответствующие каждой предварительно определенной длине волны, могут быть сформированы. Внутренний радиус или внешний радиус каждого измерительного кольцевого луча является соответствующим расстоянием измерения, то есть каждый измерительный кольцевой луч может быть лучом, для которого расстояние от источника до детектора от положения излучения, является соответствующим расстоянием измерения. Внутренний радиус или внешний радиус каждого опорного кольцевого луча является соответствующим опорным расстоянием, то есть каждый опорный кольцевой луч может быть лучом, для которого расстояние от источника до детектора от положения излучения является соответствующим опорным расстоянием. Поскольку предусмотрена фоточувствительная поверхность, соответствующая положению излучения, каждый измерительный кольцевой луч может быть лучом, для которого расстояние от источника до детектора от фоточувствительной поверхности является соответствующим расстоянием измерения, и каждый опорный кольцевой луч может быть лучом, для которого расстояние от источника до детектора от фоточувствительной поверхности является соответствующим опорным расстоянием. Измерительный кольцевой луч соответствует расстоянию измерения, а опорный кольцевой луч соответствует опорному расстоянию. Следует отметить, что каждый измерительный кольцевой луч и каждый опорный кольцевой луч могут быть сформированы точечным сканированием светового пятна или проекцией луча.
[131] Например, как показано на фиг. 14, на фиг. 14 представлено схематическое изображение измерительного кольцевого луча и опорного кольцевого луча, сформированных на поверхности детектируемого места согласно вариантам осуществления настоящего изобретения. Для детектируемого места детектируемого объекта измерительный кольцевой луч и опорный кольцевой луч, соответствующие каждой предварительно определенной длине волны, сформированы на поверхности детектируемого места. Измерительный кольцевой луч и опорный кольцевой луч имеют один и тот же геометрический центр. Фоточувствительная поверхность предусмотрена в положении, соответствующем геометрическому центру. Фоточувствительная поверхность может принимать второе измеренное значение интенсивности света, излучаемое с поверхности детектируемого места после прохождения каждого измерительного кольцевого луча через детектируемое место, и второе опорное значение интенсивности света, излучаемое с поверхности детектируемого места после прохождения каждого опорного кольцевого луча через детектируемое место. Как показано на фиг. 15, на фиг. 15 представлено схематическое изображение получения второго измеренного значения интенсивности света и второго опорного значения интенсивности света на основе фоточувствительной поверхности согласно вариантам осуществления настоящего изобретения.
[132] Согласно вариантам осуществления настоящего изобретения расстояние измерения и/или опорное расстояние могут быть точно определены, и второе измеренное значение интенсивности света и/или второе опорное значение интенсивности света могут быть точно определены согласно точно определенным расстоянию измерения и/или опорному расстоянию, в сочетании со способом формирования измерительного кольцевого луча и/или опорного кольцевого луча. Поскольку концентрацию детектируемого элемента ткани определяют согласно точно определенным второму измеренному значению интенсивности света и/или второму опорному значению интенсивности света, точность детектирования может быть улучшена.
[133] Согласно вариантам осуществления настоящего изобретения каждый измерительный кольцевой луч сформирован точечным сканированием светового пятна или проекцией луча, и каждый опорный кольцевой луч сформирован точечным сканированием светового пятна или проекцией луча.
[134] Согласно вариантам осуществления настоящего изобретения каждый измерительный кольцевой луч и каждый опорный кольцевой луч могут быть сформированы двумя способами. Первый способ представляет собой точечное сканирование светового пятна, а второй способ – проекцию луча. Для первого способа может быть сделана ссылка на фиг. 4. Для второго способа может быть сделана ссылка на фиг. 5.
[135] Согласно вариантам осуществления настоящего изобретения операция 420 может включать следующие операции. Для каждой предварительно определенной длины волны выполнение операции определения разности между вторым измеренным значением интенсивности света и вторым опорным значением интенсивности света, соответствующим предварительно определенной длине волны, для получения значения разности интенсивности света. Концентрация детектируемого элемента ткани может быть определена согласно значению разности интенсивности света, соответствующему каждой предварительно определенной длине волны.
[136] Согласно вариантам осуществления настоящего изобретения для дополнительного повышения точности детектирования для каждой предварительно определенной длины волны выполняют операцию определения разности между вторым измеренным значением интенсивности света и вторым опорным значением интенсивности света, соответствующим предварительно определенной длине волны, для получения значения разности интенсивности света, соответствующего предварительно определенной длине волны. На основе этого может быть получено значение разности интенсивности света, соответствующее каждой предварительно определенной длине волны, а концентрация детектируемого элемента ткани может быть определена согласно значению разности интенсивности света, соответствующему каждой предварительно определенной длине волны. Определение концентрации детектируемого элемента ткани согласно значению разности интенсивности света, соответствующему каждой предварительно определенной длине волны, может быть понято следующим образом. Значение разности интенсивности света, соответствующее каждой предварительно определенной длине волны, может быть введено в модель предсказания для элемента ткани, генерируемую путем предварительного обучения, для получения результата предсказания и результат предсказания представляет собой концентрацию детектируемого элемента ткани. Конкретный способ вычисления может относиться к патентному документу, опубликованному 23 ноября 2005 года с номером публикации CN1699973A, который не будет подробно описан здесь.
[137] Согласно вариантам осуществления настоящего изобретения второе опорное значение интенсивности света, соответствующее опорному расстоянию, отражает отклик, вызванный помехой, отличный от изменения концентрации детектируемого элемента ткани в процессе детектирования, в то время как второе измеренное значение интенсивности света, соответствующее расстоянию измерения, отражает отклик детектируемого элемента ткани и отклик помехи, отличный от детектируемого элемента ткани. Таким образом, может быть использовано опорное измеренное значение, то есть второе опорное значение интенсивности света, соответствующее опорному расстоянию, может быть использовано для коррекции второго измеренного значения интенсивности света, соответствующего расстоянию измерения, чтобы в наибольшей степени устранить синфазные помехи, тем самым дополнительно повышая точность детектирования.
[138] Как показано на фиг. 7, на фиг. 8, на фиг. 15 и на фиг. 16, согласно вариантам осуществления настоящего изобретения фоточувствительная поверхность находится в контакте или не находится в контакте с поверхностью детектируемого места.
[139] Согласно вариантам осуществления настоящего изобретения форма неинвазивного детектирования элемента ткани может включать контактное детектирование и бесконтактное детектирование. Контактное детектирование может включать два способа. В первом способе фоточувствительная поверхность находится в контакте с поверхностью детектируемого места, как показано на фиг. 16. На фиг. 16 представлено другое схематическое изображение получения второго измеренного значения интенсивности света и второго опорного значения интенсивности света на основе фоточувствительной поверхности согласно вариантам осуществления настоящего изобретения. Как показано на фиг. 16, фоточувствительная поверхность находится в контакте с поверхностью детектируемого места. Во втором способе фоточувствительная поверхность расположена на первом конце световодной части, а второй конец световодной части находится в контакте с поверхностью детектируемого места, как показано на фиг. 7.
[140] Бесконтактное детектирование может включать два способа. В первом способе фоточувствительная поверхность не находится в контакте с поверхностью детектируемого места и фоточувствительная поверхность не получает первое значение интенсивности света через световодную часть, как показано на фиг. 15. Во втором способе фоточувствительная поверхность расположена на первом конце световодной части, а второй конец световодной части не находится в контакте с поверхностью детектируемого места, как показано на фиг. 8. Следует отметить, что для описания контактного детектирования и бесконтактного детектирования может быть сделана ссылка на соответствующие приведенные выше части, и подробности здесь не повторяются.
[141] Как показано на фиг. 7 и на фиг. 8, согласно вариантам осуществления настоящего изобретения отсутствие контакта между фоточувствительной поверхностью и поверхностью детектируемого места может быть достигнуто путем расположения фоточувствительной поверхности на первом конце световодной части, второй конец световодной части находится в контакте или не находится в контакте с поверхностью детектируемого места, а первый конец световодной части и второй конец световодной части являются противоположными торцами.
[142] Согласно вариантам осуществления настоящего изобретения, чтобы достичь отсутствия контакта между фоточувствительной поверхностью и поверхностью детектируемого места, фоточувствительная поверхность может быть расположена на первом конце световодной части. Следует отметить, что для описания расположения фоточувствительной поверхности на первом конце световодной части может быть сделана ссылка на соответствующую приведенную выше часть, и подробности здесь не повторяются.
[143] Согласно вариантам осуществления настоящего изобретения фоточувствительная поверхность не находится в контакте с поверхностью детектируемого места. Перед получением второго измеренного значения интенсивности света, которое излучается с поверхности детектируемого места после прохождения каждого измерительного кольцевого луча через детектируемое место, на основе фоточувствительной поверхности, соответствующей геометрическому центру, и/или получением второго опорного значения интенсивности света, которое излучается с поверхности детектируемого места после прохождения каждого опорного кольцевого луча через детектируемое место, на основе фоточувствительной поверхности, соответствующей геометрическому центру, способ может дополнительно включать операцию экранирования интерференционного света.
[144] Согласно вариантам осуществления настоящего изобретения после передачи измерительного кольцевого луча и/или опорного кольцевого луча на детектируемое место, часть измерительного кольцевого луча и часть опорного кольцевого луча могут быть непосредственно отражены на поверхности детектируемого места для формирования света, отраженного от поверхности, и часть измерительного кольцевого луча и часть опорного кольцевого луча проходят через детектируемое место, а диффузно-рассеянный свет (т. е. второе измеренное значение интенсивности света и второе опорное значение интенсивности света) излучается с поверхности детектируемого места. Свет, отраженный от поверхности, не взаимодействует с тканью и, следовательно, может не нести достоверной информации. Достоверная информация может быть понята как отклик, вызванный изменением концентрации детектируемого элемента ткани в процессе детектирования. Следовательно, свет, отраженный от поверхности, может быть рассмотрен как интерференционный свет. Диффузно-рассеянный свет взаимодействует с кожной тканью и несет достоверную информацию, и, таким образом, может быть рассмотрен как достоверный свет.
[145] Если фоточувствительная поверхность не находится в контакте с поверхностью детектируемого места, то может быть сгенерирован свет, отраженный от поверхности. На основе этого для дополнительного повышения точности детектирования интерференционный свет может быть экранировано до получения второго измеренного значения интенсивности света, излучаемого с поверхности детектируемого места, после прохождения каждого измерительного кольцевого луча через детектируемое место на основе фоточувствительной поверхности, соответствующей геометрическому центру, и/или второго опорного значения интенсивности света, излучаемого с поверхности детектируемого места, после прохождения каждого опорного кольцевого луча через детектируемое место на основе фоточувствительной поверхности, соответствующей геометрическому центру, таким образом, второе измеренное значение интенсивности света и/или второе опорное значение интенсивности света, излучаемые с поверхности детектируемого места после прохождения каждого измерительного кольцевого луча и/или каждого опорного кольцевого луча через детектируемое место, получают на основе фоточувствительной поверхности. Интерференционный свет может быть экранирован следующими двумя способами.
[146] В первом способе, если фоточувствительная поверхность не находится в контакте с поверхностью детектируемого места и фоточувствительная поверхность не получает второе измеренное значение интенсивности света и второе опорное значение интенсивности света через световодную часть, первая часть, блокирующая свет, может быть предусмотрена в области зазора между фоточувствительной поверхностью и поверхностью детектируемого места, и первая часть, блокирующая свет, находится в контакте с поверхностью детектируемого места. Фоточувствительная поверхность расположена на внутренней стороне первой части, блокирующей свет. Первая часть, блокирующая свет, является неотъемлемой частью фоточувствительной поверхности или первая часть, блокирующая свет, отделена от фоточувствительной поверхности, как показано на фиг. 17. На фиг. 17 представлено другое схематическое изображение экранирования интерференционного света согласно вариантам осуществления настоящего изобретения.
[147] Во втором способе, если фоточувствительная поверхность расположена на первом конце световодной части, а второй конец световодной части не находится в контакте с поверхностью детектируемого места, вторая часть, блокирующая свет, может быть предусмотрена в области зазора между световодной частью и поверхностью детектируемого места, первый конец второй части, блокирующей свет, находится в контакте со вторым концом световодной части, второй конец второй части, блокирующей свет, находится в контакте с поверхностью детектируемого места, а второй конец второй части, блокирующей свет, и первый конец второй части, блокирующей свет, являются противоположными торцами. Расстояние между первым концом второй части, блокирующей свет, и поверхностью детектируемого места больше, чем расстояние между вторым концом второй части, блокирующей свет, и поверхностью детектируемого места, как показано на фиг. 10.
[148] Согласно вариантам осуществления настоящего изобретения интерференционный свет экранируется перед получением второго измеренного значения интенсивности света и второго опорного значения интенсивности света, излучаемых с поверхности детектируемого места после прохождения каждого измерительного кольцевого луча и/или каждого опорного кольцевого луча через детектируемое место, так что фоточувствительная поверхность получает только диффузно-рассеянный свет. Поскольку диффузно-рассеянный свет несет достоверную информацию, точность детектирования может быть дополнительно повышена.
[149] На фиг. 18 представлена блок-схема другого способа неинвазивного детектирования для элемента ткани согласно вариантам осуществления настоящего изобретения. Такие варианты осуществления могут быть применены для повышения точности детектирования концентрации детектируемого элемента ткани.
[150] Как показано на фиг. 18, способ включает операции S510–S570.
[151] В операции S510 для детектируемого места детектируемого объекта по меньшей мере два целевых кольцевых луча, соответствующих каждой предварительно определенной длине волны, формируют на поверхности детектируемого места.
[152] Согласно вариантам осуществления настоящего изобретения разные целевые кольцевые лучи имеют разные расстояния от источника до детектора, каждое расстояние от источника до детектора является внутренним радиусом или внешним радиусом целевого кольцевого луча, а разные целевые кольцевые лучи имеют один и тот же геометрический центр. Предварительно определенная длина волны включает по меньшей мере одну предварительно определенную длину волны. Каждый целевой кольцевой луч сформирован точечным сканированием светового пятна или проекцией луча.
[153] В операции S520 первое значение интенсивности света, излучаемое с поверхности детектируемого места после прохождения каждого целевого кольцевого луча через детектируемое место, получают на основе фоточувствительной поверхности, соответствующей геометрическому центру.
[154] В операции S530 первое измеренное значение интенсивности света и первое опорное значение интенсивности света определяют из первых значений интенсивности света, соответствующих предварительно определенной длине волны, в соответствии с абсолютным значением разности интенсивности света, вызванной изменением концентрации детектируемого элемента ткани, расстояние от источника до детектора, соответствующее первому измеренному значению интенсивности света, определяют в качестве расстояния измерения, и расстояние от источника до детектора, соответствующее первому опорному значению интенсивности света, определяют в качестве опорного расстояния.
[155] Согласно вариантам осуществления настоящего изобретения первое измеренное значение интенсивности света представляет собой первое значение интенсивности света, соответствующее наибольшему абсолютному значению разности интенсивности света, вызванной изменением концентрации детектируемого элемента ткани, и первое опорное значение интенсивности света представляет собой первое значение интенсивности света, соответствующее наименьшему абсолютному значению разности интенсивности света, вызванной изменением концентрации детектируемого элемента ткани. Разность интенсивности света, вызванная изменением концентрации детектируемого элемента ткани, представляет собой разность между первым значением интенсивности света и соответствующим предварительно определенным значением интенсивности света.
[156] В операции S540 для детектируемого места детектируемого объекта измерительный кольцевой луч и опорный кольцевой луч, соответствующие каждой предварительно определенной длине волны, формируют на поверхности детектируемого места.
[157] Согласно вариантам осуществления настоящего изобретения внутренний радиус или внешний радиус каждого измерительного кольцевого луча является соответствующим расстоянием измерения, внутренний радиус или внешний радиус каждого опорного кольцевого луча является соответствующим опорным расстоянием, и каждый измерительный кольцевой луч и каждый опорный кольцевой луч имеют один и тот же геометрический центр. Каждый измерительный кольцевой луч сформирован точечным сканированием светового пятна или проекцией луча, и каждый опорный кольцевой луч сформирован точечным сканированием светового пятна или проекцией луча.
[158] В операции S550 получают второе измеренное значение интенсивности света, излучаемое с поверхности детектируемого места после прохождения каждого измерительного кольцевого луча через детектируемое место, и второе опорное значение интенсивности света, излучаемое с поверхности детектируемого места после прохождения каждого опорного кольцевого луча через детектируемое место, на основе фоточувствительной поверхности, соответствующей геометрическому центру.
[159] В операции S560 для каждой предварительно определенной длины волны выполняют операцию определения разности между вторым измеренным значением интенсивности света и вторым опорным значением интенсивности света на предварительно определенной длине волны, чтобы получить значение разности интенсивности света.
[160] В операции S570 концентрацию детектируемого элемента ткани определяют согласно значению разности интенсивности света, соответствующему каждой предварительно определенной длине волны.
[161] Согласно вариантам осуществления настоящего изобретения фоточувствительная поверхность находится в контакте или не находится в контакте с поверхностью детектируемого места. Отсутствие контакта между фоточувствительной поверхностью и поверхностью детектируемого места может быть достигнуто путем расположения фоточувствительной поверхности на первом конце световодной части, второй конец световодной части находится в контакте или не находится в контакте с поверхностью детектируемого места, а первый конец световодной части и второй конец световодной части являются противоположными торцами. Если фоточувствительная поверхность не находится в контакте с поверхностью детектируемого места, способ может дополнительно включать операцию экранирования интерференционного света до операции S520 и операцию экранирования интерференционного света до операции S550.
[162] Согласно вариантам осуществления настоящего изобретения, поскольку первое значение интенсивности света, соответствующее каждой предварительно определенной длине волны на каждом расстоянии от источника до детектора, может быть получено путем регулировки размера целевого кольцевого луча, первое измеренное значение интенсивности света и/или первое опорное значение интенсивности света могут быть точно определены, и расстояние измерения и/или опорное расстояние могут быть точно определены. На основании этого второе измеренное значение интенсивности света и/или второе опорное значение интенсивности света могут быть точно определены согласно точно определенным расстоянию измерения и/или опорному расстоянию, в сочетании со способом формирования измерительного кольцевого луча и/или опорного кольцевого луча. Поскольку концентрацию детектируемого элемента ткани определяют согласно точно определенным второму измеренному значению интенсивности света и/или второму опорному значению интенсивности света, точность детектирования может быть улучшена. Посредством операции определения разности могут быть устранены синфазные помехи во втором опорном значении интенсивности света и во втором измеренном значении интенсивности света, так что точность детектирования может быть дополнительно улучшена. Кроме того, способы излучения и приема целевого кольцевого луча и фоточувствительной поверхности могут значительно снизить требования к фотоэлектрическому детектору, тем самым снижая производственные затраты и упрощая реализацию. Кроме того, может быть достигнуто непрерывное детектирование.
[163] На фиг. 19 представлена блок-схема еще одного способа неинвазивного детектирования для элемента ткани согласно вариантам осуществления настоящего изобретения. Такие варианты осуществления могут быть применены для повышения точности детектирования концентрации детектируемого элемента ткани.
[164] Как показано на фиг. 19, способ включает операции S610–S660.
[165] В операции S610 для детектируемого места детектируемого объекта получают оптический параметр ткани, соответствующий каждой предварительно определенной длине волны из по меньшей мере одной предварительно определенной длины волны, и взаимосвязь изменения оптического параметра ткани, вызванную изменением концентрации детектируемого элемента ткани.
[166] В операции S620 каждое расстояние измерения и каждое опорное расстояние определяют в соответствии с оптическим параметром ткани, соответствующим каждой предварительно определенной длине волны, и взаимосвязью изменения оптического параметра ткани, вызванной изменением концентрации детектируемого элемента ткани.
[167] В операции S630 для детектируемого места детектируемого объекта измерительный кольцевой луч и опорный кольцевой луч, соответствующие каждой предварительно определенной длине волны, формируют на поверхности детектируемого места.
[168] Согласно вариантам осуществления настоящего изобретения внутренний радиус или внешний радиус каждого измерительного кольцевого луча является соответствующим расстоянием измерения, внутренний радиус или внешний радиус каждого опорного кольцевого луча является соответствующим опорным расстоянием, и каждый измерительный кольцевой луч и каждый опорный кольцевой луч имеют один и тот же геометрический центр. Каждый измерительный кольцевой луч сформирован точечным сканированием светового пятна или проекцией луча, и каждый опорный кольцевой луч сформирован точечным сканированием светового пятна или проекцией луча. Фоточувствительная поверхность находится в контакте или не находится в контакте с поверхностью детектируемого места. Отсутствие контакта между фоточувствительной поверхностью и поверхностью детектируемого места может быть достигнуто путем расположения фоточувствительной поверхности на первом конце световодной части, второй конец световодной части находится в контакте или не находится в контакте с поверхностью детектируемого места, а первый конец и второй конец световодной части являются противоположными торцами.
[169] В операции S640 получают второе измеренное значение интенсивности света, излучаемое с поверхности детектируемого места после прохождения каждого измерительного кольцевого луча через детектируемое место, и второе опорное значение интенсивности света, излучаемое с поверхности детектируемого места после прохождения каждого опорного кольцевого луча через детектируемое место, на основе фоточувствительной поверхности, соответствующей геометрическому центру.
[170] В операции S650 для каждой предварительно определенной длины волны выполняют операцию определения разности между вторым измеренным значением интенсивности света и вторым опорным значением интенсивности света для предварительно определенной длины волны, чтобы получить значение разности интенсивности света.
[171] В операции S660 концентрацию детектируемого элемента ткани определяют согласно значению разности интенсивности света, соответствующему каждой предварительно определенной длине волны.
[172] Согласно вариантам осуществления настоящего изобретения, если фоточувствительная поверхность не находится в контакте с поверхностью детектируемого места, способ может дополнительно включать операцию экранирования интерференционного света до операции S640.
[173] Способ определения расстояния при неинвазивном детектировании элемента ткани, описанный в вариантах осуществления настоящего изобретения, может быть выполнен устройством определения расстояния при неинвазивном детектировании элемента ткани и способ неинвазивного детектирования для элемента ткани может быть выполнен устройством неинвазивного детектирования для элемента ткани. Устройство определения расстояния при неинвазивном детектировании элемента ткани и устройство неинвазивного детектирования для элемента ткани могут быть реализованы в виде программного обеспечения и/или аппаратного обеспечения, а устройство неинвазивного детектирования для элемента ткани может быть выполнено как носимое устройство, такое как умные часы.
[174] На фиг. 20 представлено схематическое структурное изображение устройства определения расстояния при неинвазивном детектировании элемента ткани согласно вариантам осуществления настоящего изобретения. Такие варианты осуществления могут быть применены для повышения точности детектирования концентрации детектируемого элемента ткани.
[175] Как показано на фиг. 20, устройство 1 определения расстояния при неинвазивном детектировании элемента ткани содержит первый модуль 10 получения и первый модуль 11 определения. Конструкция и принцип работы будут описаны ниже со ссылкой на сопроводительные графические материалы.
[176] Первый модуль 10 получения используется для получения первого значения интенсивности света, соответствующего каждой предварительно определенной длине волны из по меньшей мере одной предварительно определенной длины волны на каждом расстоянии от источника до детектора из по меньшей мере двух расстояний от источника до детектора для детектируемого места детектируемого объекта.
[177] Первый модуль 11 определения используется для определения первого измеренного значения интенсивности света и/или первого опорного значения интенсивности света из первых значений интенсивности света, соответствующих предварительно определенной длине волны, в соответствии с абсолютным значением разности интенсивности света, вызванной изменением концентрации детектируемого элемента ткани, определения расстояния от источника до детектора, соответствующего первому измеренному значению интенсивности света, в качестве расстояния измерения, и определения расстояния от источника до детектора, соответствующего первому опорному значению интенсивности света, в качестве опорного расстояния. Первое измеренное значение интенсивности света представляет собой первое значение интенсивности света, соответствующее наибольшему абсолютному значению разности интенсивности света, вызванной изменением концентрации детектируемого элемента ткани, первое опорное значение интенсивности света представляет собой первое значение интенсивности света, соответствующее наименьшему абсолютному значению разности интенсивности света, вызванной изменением концентрации детектируемого элемента ткани, и разность интенсивности света, вызванная изменением концентрации детектируемого элемента ткани, представляет собой разность между первым значением интенсивности света и соответствующим предварительно определенным значением интенсивности света.
[178] Согласно вариантам осуществления настоящего изобретения за конкретными процедурами обработки первого модуля 10 получения и первого модуля 11 определения можно обратиться к приведенному выше описанию в соответствующей части способа определения расстояния в неинвазивном детектировании элемента ткани, а подробности здесь не повторяются.
[179] Как показано на фиг. 21, согласно вариантам осуществления настоящего изобретения первый модуль 10 получения содержит первый субмодуль 100 формирования и первый субмодуль 101 получения.
[180] Первый субмодуль 100 формирования используется для формирования, для детектируемого места детектируемого объекта, по меньшей мере двух целевых кольцевых лучей, соответствующих каждой предварительно определенной длине волны на поверхности детектируемого места, где разные целевые кольцевые лучи имеют разные расстояния от источника до детектора, каждое расстояние от источника до детектора является внутренним радиусом или внешним радиусом целевого кольцевого луча, и разные целевые кольцевые лучи имеют один и тот же геометрический центр.
[181] Первый субмодуль 101 получения используется для получения, на основании фоточувствительной поверхности, соответствующей геометрическому центру, первого значения интенсивности света, излучаемого с поверхности детектируемого места после прохождения каждого целевого кольцевого луча через детектируемое место.
[182] Согласно вариантам осуществления настоящего изобретения за конкретными процедурами обработки первого субмодуля 100 формирования и первого субмодуля 101 получения можно обратиться к приведенному выше описанию в соответствующей части способа определения расстояния в неинвазивном детектировании элемента ткани, а подробности здесь не повторяются.
[183] Как показано на фиг. 22, согласно вариантам осуществления настоящего изобретения первый субмодуль 100 формирования содержит источник 1000 света, устройство 1001 регулировки луча и контроллер 1002. Контроллер 1002 может быть соединен с возможностью связи с источником 1000 света и устройством 1001 регулировки луча соответственно.
[184] Контроллер 1002 используется, для детектируемого места детектируемого объекта, для управления источником 1000 света и устройством 1001 регулировки луча для совместного действия для формирования по меньшей мере двух целевых кольцевых лучей, соответствующих каждой предварительно определенной длине волны на поверхности детектируемого места, согласно соответствующей команде рабочего состояния.
[185] Согласно вариантам осуществления настоящего изобретения команда рабочего состояния может быть командой для управления рабочими состояниями источника 1000 света и устройства 1001 регулировки луча. Для детектируемого места детектируемого объекта контроллер 1002 может управлять источником 1000 света и устройством 1001 регулировки луча для совместного действия для формирования по меньшей мере двух целевых кольцевых лучей, соответствующих каждой предварительно определенной длине волны на поверхности детектируемого места, согласно соответствующей команде рабочего состояния. Можно понять, что контроллер 1002 может управлять источником 1000 света и устройством 1001 регулировки луча для совместного действия для формирования каждого целевого кольцевого луча, соответствующего каждой предварительно определенной длине волны согласно соответствующей команде рабочего состояния.
[186] Как показано на фиг. 23, согласно вариантам осуществления настоящего изобретения устройство 1001 регулировки луча содержит сканирующее зеркало 10010 микроэлектромеханической системы (MEMS).
[187] Контроллер 1002 используется, для детектируемого места детектируемого объекта, для управления источником 1000 света, согласно соответствующей команде рабочего состояния, для излучения падающего луча, соответствующего каждой предварительно определенной длине волны, и проецирования каждого падающего луча на сканирующее зеркало 10010 MEMS, и управления сканирующим зеркалом 10010 MEMS, согласно соответствующей команде рабочего состояния, для преобразования каждого падающего луча в соответствующий целевой кольцевой луч и проецирования каждого целевого кольцевого луча на поверхность детектируемого места.
[188] Согласно вариантам осуществления настоящего изобретения источник 1000 света и сканирующее зеркало 10010 MEMS могут действовать совместно для формирования каждого целевого кольцевого луча под управлением контроллера 1002. Сканирующее зеркало 10010 MEMS может быть двухмерным сканирующим зеркалом MEMS.
[189] Согласно вариантам осуществления настоящего изобретения контроллер 1002 может синхронно управлять источником 1000 света и сканирующим зеркалом 10010 MEMS для достижения двухмерного сканированного изображения, состоящего из предварительно определенных точек пикселей посредством прогрессивного сканирования. Если траектория, сформированная предварительно определенными точками пикселей, представляет собой целевое кольцо, то тогда двухмерное сканированное изображение представляет собой целевое кольцевое изображение. Вышеупомянутый способ сканирования позволяет определять моменты времени отображения и пространственные координаты предварительно определенных точек пикселей в целевом кольцевом изображении. Пространственные координаты предварительно определенных точек пикселей в целевом кольцевом изображении определяют углом отражения сканирующего зеркала 10010 MEMS. Моменты времени отображения предварительно определенных точек пикселей в целевом кольцевом изображении определяют источником 1000 света. То есть источник 1000 света и сканирующее зеркало 10010 MEMS могут синхронно управляться контроллером 1002, чтобы достичь соответствия между моментом времени отображения и пространственной координатой предварительно определенной точки пикселя. Разные предварительно определенные точки пикселей могут формировать целевые кольцевые изображения, имеющие разные размеры. Целевые кольцевые изображения разных размеров могут быть спроецированы на детектируемое место для формирования целевых кольцевых лучей разных размеров. Следует отметить, что пространственная координата и момент времени отображения предварительно определенной точки пикселя могут быть реализованы в команде рабочего состояния.
[190] Как показано на фиг. 24, согласно вариантам осуществления настоящего изобретения устройство 1001 регулировки луча может содержать узел 10011 гальванического сканирования.
[191] Контроллер 1002 используется, для детектируемого места детектируемого объекта, для управления источником 1000 света согласно соответствующей команде рабочего состояния для излучения падающего луча, соответствующего каждой предварительно определенной длине волны, и проецирования каждого падающего луча на узел 10011 гальванического сканирования, и управления узлом 10011 гальванического сканирования согласно соответствующей команде рабочего состояния для преобразования каждого падающего луча в соответствующий целевой кольцевой луч и проецирования каждого целевого кольцевого луча на поверхность детектируемого места.
[192] Согласно вариантам осуществления настоящего изобретения источник 1000 света и узел 10011 гальванического сканирования могут действовать совместно для формирования каждого целевого кольцевого луча под управлением контроллера 1002. То есть падающий луч, соответствующий каждой предварительно определенной длине волны, излучаемый источником 1000 света под управлением контроллера 1002 согласно команде рабочего состояния может быть спроецирован на положение сканирования узлом 10011 гальванического сканирования под управлением контроллера 1002 согласно команде рабочего состояния. Падающий луч может представлять собой точечное световое пятно на положении сканирования. Посредством кругового сканирования точечного светового пятна на 360° и формирования целевого кольцевого луча с переменным размером могут быть сформированы целевые кольцевые лучи, имеющие разные размеры.
[193] Как показано на фиг. 24, согласно вариантам осуществления настоящего изобретения узел 10011 гальванического сканирования содержит первый двухосевой гальванический сканер 100110 и второй двухосевой гальванический сканер 100111.
[194] Контроллер 1002 используется, для детектируемого места детектируемого объекта, для управления источником 1000 света согласно соответствующей команде рабочего состояния для излучения падающего луча, соответствующего каждой предварительно определенной длине волны, и проецирования каждого падающего луча на первый двухосевой гальванический сканер 100110.
[195] Контроллер 1002 используется для управления первым двухосевым гальваническим сканером 100110 согласно соответствующей команде рабочего состояния для отражения первого предварительно определенного угла вдоль оси X так, что каждый падающий луч отражается под первым предварительно определенным углом в направлении оси X, и проецирования отраженного падающего луча на второй двухосевой гальванический сканер 100111.
[196] Контроллер 1002 используется для управления вторым двухосевым гальваническим сканером 100111 согласно команде рабочего состояния для отражения второго предварительно определенного угла вдоль оси Y для формирования каждого целевого кольцевого луча и проецирования каждого целевого кольцевого луча на поверхность детектируемого места.
[197] Согласно вариантам осуществления настоящего изобретения узел 10011 гальванического сканирования содержит первый двухосевой гальванический сканер 100110 и второй двухосевой гальванический сканер 100111, и контроллер 1002 может управлять изменением направления отражения первого двухосевого гальванического сканера 100110 и второго двухосевого гальванического сканера 100111 для достижения поворота падающего луча на 360°, то есть для достижения кругового сканирования. Кроме того, контроллер 1002 может управлять изменением угла отражения первого двухосевого гальванического сканера 100110 и второго двухосевого гальванического сканера 100111, чтобы сформировать целевой кольцевой луч с переменным размером путем сканирования, то есть сформировать целевые кольцевые лучи разных размеров. Контроллер 1002 может управлять первым двухосевым гальваническим сканером 100110 для отражения первого предварительно определенного угла вдоль оси X так, что каждый падающий луч отражается под первым предварительно определенным углом в направлении оси X вместе с первым двухосевым гальваническим сканером 100110, и проецирования отраженного падающего луча на второй двухосевой гальванический сканер 100111. Контроллер 1002 может управлять вторым двухосевым гальваническим сканером 100111 для отражения второго предварительно определенного угла вдоль оси Y так, что каждый отраженный падающий луч отражается под вторым предварительно определенным углом в направлении оси Y вместе со вторым двухосевым гальваническим сканером 100111, чтобы сформировать каждый целевой кольцевой луч. Вышеупомянутый первый предварительно определенный угол и второй предварительно определенный угол могут быть предусмотрены с возможностью определения того, что падающий луч спроецирован на положение сканирования, и падающий луч представляет собой точечное световое пятно на положении сканирования. Контроллер 1002 может управлять углом отражения и направлением отражения первого двухосевого гальванического сканера 100110 и второго двухосевого гальванического сканера 100111 для достижения вращения точечного светового пятна на 360° на поверхности детектируемого места, то есть для получения кругового сканирования. Кроме того, целевой кольцевой луч с переменным размером сформирован посредством сканирования, то есть сформированы целевые кольцевые лучи разных размеров.
[198] Согласно вариантам осуществления настоящего изобретения контроллер 1002 может управлять согласно разным командам рабочего состояния первым двухосевым гальваническим сканером 100110 и вторым двухосевым гальваническим сканером 100111 для отражения разных углов отражения и отражения в разные направления отражения, чтобы сформировать каждый целевой кольцевой луч разных размеров.
[199] Согласно вариантам осуществления настоящего изобретения размер первого двухосевого гальванического сканера 100110 может быть меньше размера второго двухосевого гальванического сканера 100111. Гальванометр, на который сначала спроецирован падающий луч, может обычно иметь небольшой размер, который должен быть больше только размера падающего луча. Гальванометр, на который сначала спроецирован падающий луч, можно называть первым двухосевым гальваническим сканером. Соответственно, гальванометр, на который позже спроецирован падающий луч, можно называть вторым двухосевым гальваническим сканером. Поскольку скорость сканирования по оси X высокая и гальванометр с небольшой массой имеет небольшую инерцию, первый двухосевой гальванический сканер может быть выполнен с возможностью сканирования по оси X. Поскольку второй двухосевой гальванический сканер должен принимать полный диапазон, отсканированный первым двухосевым гальваническим сканером, размер второго двухосевого гальванического сканера должен быть больше первого двухосевого гальванического сканера, и второй двухосевой гальванический сканер может быть выполнен с возможностью сканирования по оси Y. В вариантах осуществления настоящего изобретения первый двухосевой гальванический сканер 100110 можно использовать как первый двухосевой гальванический сканер, и второй двухосевой гальванический сканер 100111 можно использовать как второй двухосевой гальванический сканер. На основе вышесказанного первый двухосевой гальванический сканер 100110 может быть выполнен с возможностью сканирования по оси X, и второй двухосевой гальванический сканер 100111 может быть выполнен с возможностью сканирования по оси Y.
[200] Как показано на фиг. 25, согласно вариантам осуществления настоящего изобретения устройство 1001 регулировки луча содержит вращающееся зеркало 10012 и первую линзу 10013 фокусировки напряжения.
[201] Контроллер 1002 используется, для детектируемого места детектируемого объекта, для управления источником 1000 света согласно соответствующей команде рабочего состояния для излучения падающего луча, соответствующего каждой предварительно определенной длине волны, и проецирования каждого падающего луча на вращающееся зеркало 10012.
[202] Контроллер 1002 используется для управления согласно соответствующей команде рабочего состояния вращающимся зеркалом 10012 для вращения под разными углами, чтобы преобразовать каждый падающий луч в соответствующий исходный кольцевой луч, и проецирования каждого исходного кольцевого луча на первую линзу 10013 фокусировки напряжения.
[203] Контроллер 1002 используется для управления первой линзой 10013 фокусировки напряжения согласно соответствующей команде рабочего состояния для регулировки внутреннего радиуса или внешнего радиуса каждого исходного кольцевого луча с соответствующим расстоянием от источника до детектора для получения каждого целевого кольцевого луча, и проецирования каждого целевого кольцевого луча на детектируемое место.
[204] Согласно вариантам осуществления настоящего изобретения источник 1000 света, вращающееся зеркало 10012 и первая линза 10013 фокусировки напряжения могут действовать совместно для формирования каждого целевого кольцевого луча под управлением контроллера 1002. Как показано на фиг. 25, источник 1000 света можно использовать для излучения каждого падающего луча, соответствующего каждой предварительно определенной длине волны, и каждый падающий луч преобразуется в соответствующий исходный кольцевой луч вращающимся зеркалом 10012 для непрерывного прохождения, то есть контроллер 1002 может управлять вращающимся зеркалом 10012 для достижения вращательного сканирования каждого падающего луча на 360°, чтобы сформировать исходный кольцевой луч. Каждый исходный кольцевой луч проходит через первую линзу 10013 фокусировки напряжения для формирования соответствующего целевого кольцевого луча. Размер исходного кольцевого луча регулируют посредством управления фокусной длиной первой линзы 10013 фокусировки напряжения, чтобы сформировать каждый целевой кольцевой луч разных размеров.
[205] Согласно вариантам осуществления настоящего изобретения каждая команда рабочего состояния сгенерирована контроллером 1002 согласно первой таблице связи состояний, в которой хранится соответствующая связь между каждым целевым кольцевым лучом, соответствующим каждой предварительно определенной длине волны, и рабочим напряжением первой линзы 10013 фокусировки напряжения для детектируемого места детектируемого объекта.
[206] Согласно вариантам осуществления настоящего изобретения, поскольку целевые кольцевые лучи, соответствующие разным предварительно определенным длинам волн, имеют разные дисперсии, один и тот же исходный кольцевой луч, соответствующий разным предварительно определенным длинам волн, может формировать целевые кольцевые лучи с разными размерами после прохождения через первую линзу 10013 фокусировки напряжения с одинаковым рабочим напряжением. Для того, чтобы позволить одному и тому же исходному кольцевому лучу, соответствующему разным предварительно определенным длинам волн, формировать целевые кольцевые лучи с одинаковыми размерами после прохождения через первую линзу 10013 фокусировки напряжения, рабочее напряжение первой линзы 10013 фокусировки напряжения необходимо регулировать в соответствии с предварительно определенными длинами волн, то есть рабочее напряжение первой линзы 10013 фокусировки напряжения имеет соответствующую взаимосвязь с каждым целевым кольцевым лучом, соответствующим каждой предварительно определенной длине волны.
[207] На основе вышесказанного может быть предварительно составлена первая таблица связи состояний, в которой хранится соответствующая связь между каждым целевым кольцевым лучом, соответствующим каждой предварительно определенной длине волны, и рабочим напряжением первой линзы 10013 фокусировки напряжения для детектируемого места детектируемого объекта. Контроллер 1002 может генерировать команду рабочего состояния согласно первой таблице связи состояний, и затем управлять рабочими состояниями вращающегося зеркала 10012, первой линзы 10013 фокусировки напряжения и источника 1000 света согласно команде рабочего состояния.
[208] Согласно вариантам осуществления настоящего изобретения вышеупомянутый устройство 1001 регулировки луча может содержать сканирующее зеркало 10010 MEMS. В качестве альтернативы устройство 1001 регулировки луча может содержать узел 10011 гальванического сканирования. В качестве альтернативы устройство 1001 регулировки луча может содержать вращающееся зеркало 10012 и первую линзу 10013 фокусировки напряжения. Под управлением контроллера 1002 вышеупомянутые компоненты могут соответственно действовать совместно с источником 1000 света для формирования целевого кольцевого луча посредством точечного сканирования светового пятна.
[209] Как показано на фиг. 26, согласно вариантам осуществления настоящего изобретения устройство 1001 регулировки луча содержит микролинзовую решетку 10014 и линзу 10015, формирующую изображение.
[210] Контроллер 1002 используется, для детектируемого места детектируемого объекта, для управления источником 1000 света согласно соответствующей команде рабочего состояния для излучения падающего луча, соответствующего каждой предварительно определенной длине волны, и проецирования каждого падающего луча на микролинзовую решетку 10014, и управления микролинзовой решеткой 10014 согласно соответствующей команде рабочего состояния для преобразования каждого падающего луча в соответствующий целевой кольцевой луч и проецирования каждого целевого кольцевого луча на поверхность детектируемого места через линзу 10015, формирующую изображение.
[211] Согласно вариантам осуществления настоящего изобретения источник 1000 света и микролинзовая решетка 10014 могут действовать совместно для формирования каждого целевого кольцевого луча под управлением контроллера 1002. То есть контроллер 1002 управляет согласно команде рабочего состояния микролинзой, соответствующей каждому целевому кольцевому лучу в микролинзовой решетке 10014, так, чтобы она была в открытом состоянии, и падающий луч, соответствующий каждой предварительно определенной длине волны, который излучается источником 1000 света под управлением контроллера 1002, может быть отражен микролинзой в открытом состоянии для формирования каждого соответствующего целевого кольцевого луча. Каждый целевой кольцевой луч спроецирован на детектируемое место посредством линзы 10015, формирующей изображение. Посредством управления микролинзой в открытом состоянии в микролинзовой решетке 10014 могут быть сформированы целевые кольцевые лучи разных размеров.
[212] Как показано на фиг. 26, согласно вариантам осуществления настоящего изобретения устройство 1001 регулировки луча дополнительно содержит группу 10016 линз для расширения луча.
[213] Контроллер 1002 используется, для детектируемого места детектируемого объекта, для управления источником 1000 света согласно соответствующей команде рабочего состояния для излучения падающего луча, соответствующего каждой предварительно определенной длине волны, и проецирования каждого падающего луча на группу 10016 линз для расширения луча.
[214] Группа 10016 линз для расширения луча используется для расширения каждого падающего луча и проецирования каждого расширенного падающего луча на микролинзовую решетку 10014 так, что проекция каждого падающего луча на микролинзовую решетку 10014 покрывает микролинзовую решетку 10014.
[215] Контроллер 1002 используется для управления согласно соответствующей команде рабочего состояния микролинзовой решеткой 10014 для преобразования каждого падающего луча в соответствующий целевой кольцевой луч и проецирования каждого целевого кольцевого луча на поверхность детектируемого места через линзу 10015, формирующую изображение.
[216] Согласно вариантам осуществления настоящего изобретения для достижения того, чтобы проекция падающего луча на микролинзовую решетку 10014 покрывала микролинзовую решетку 10014, группа 10016 линз для расширения луча может быть предусмотрена для расширения падающего луча.
[217] Согласно вариантам осуществления настоящего изобретения каждая команда рабочего состояния сгенерирована контроллером 1002 согласно второй таблице связи состояний, в которой хранится соответствующая связь между каждым целевым кольцевым лучом, соответствующим каждой предварительно определенной длине волны, и микролинзой в открытом состоянии в микролинзовой решетке 10014 для детектируемого места детектируемого объекта.
[218] Согласно вариантам осуществления настоящего изобретения, поскольку целевые кольцевые лучи, соответствующие разным предварительно определенным длинам волн, имеют разные дисперсии, размеры целевых кольцевых лучей, соответствующих разным предварительно определенным длинам волн, изменяются с одинаковых на разные, после чего целевые кольцевые лучи проходят через линзу 10015, формирующую изображение. То есть, первоначально одинаковый размер целевых кольцевых лучей из-за линзы 10015, формирующей изображение, становится другим размером на поверхности детектируемого места. Для достижения этого разные предварительно определенные длины волн могут формировать один и тот же целевой кольцевой луч на поверхности детектируемого места, микролинзу в открытом состоянии в микролинзовой решетке 10014 необходимо регулировать в соответствии с предварительно определенными длинами волн, то есть микролинза в открытом состоянии в микролинзовой решетке 10014 имеет соответствующую взаимосвязь с каждым целевым кольцевым лучом, соответствующим каждой предварительно определенной длине волны.
[219] На основе вышесказанного может быть предварительно составлена вторая таблица связи состояний, в которой хранится соответствующая связь между каждым целевым кольцевым лучом, соответствующим каждой предварительно определенной длине волны, и микролинзой в открытом состоянии в микролинзовой решетке 10014 для детектируемого места детектируемого объекта. Контроллер 1002 может генерировать команду рабочего состояния согласно второй таблице связи состояний, и затем управлять рабочими состояниями микролинзовой решетки 10014 и источника 1000 света согласно команде рабочего состояния.
[220] Как показано на фиг. 27, согласно вариантам осуществления настоящего изобретения устройство 1001 регулировки луча содержит коническую линзу 10017 и вторую линзу 10018 фокусировки напряжения.
[221] Контроллер 1002 используется, для детектируемого места детектируемого объекта, для управления источником 1000 света, согласно соответствующей команде рабочего состояния, для излучения падающего луча, соответствующего каждой предварительно определенной длине волны, и проецирования каждого падающего луча на коническую линзу 10017.
[222] Коническая линза 10017 используется для преобразования каждого падающего луча в конический луч и проецирования каждого конического луча на вторую линзу 10018 фокусировки напряжения для отображения второй линзой 10018 фокусировки напряжения в виде каждого исходного кольцевого луча.
[223] Контроллер 1002 используется для управления второй линзой 10018 фокусировки напряжения, согласно соответствующей команде рабочего состояния, для регулировки внутреннего радиуса или внешнего радиуса каждого исходного кольцевого луча в соответствии с соответствующим расстоянием от источника до детектора для получения каждого целевого кольцевого луча, и проецирования каждого целевого кольцевого луча на детектируемое место.
[224] Согласно вариантам осуществления настоящего изобретения источник 1000 света и вторая линза 10018 фокусировки напряжения могут действовать совместно для формирования каждого целевого кольцевого луча под управлением контроллера 1002. Как показано на фиг. 27, источник 1000 света можно использовать для излучения падающего луча для каждой предварительно определенной длины волны. Каждый падающий луч проходит через коническую линзу 10017 и преобразуется в соответствующий конический луч для непрерывного прохождения. Каждый конический луч проецируется на приемную поверхность для формирования соответствующего исходного кольцевого луча. Каждый исходный кольцевой луч проходит через вторую линзу 10018 фокусировки напряжения для формирования соответствующего целевого кольцевого луча. Как описано выше, посредством управления фокусной длиной второй линзы 10018 фокусировки напряжения могут быть сформированы целевые кольцевые лучи.
[225] Согласно вариантам осуществления настоящего изобретения ширина кольца целевого кольцевого луча может быть определена размером светового пятна падающего луча.
[226] Согласно вариантам осуществления настоящего изобретения каждая команда рабочего состояния сгенерирована контроллером 1002 согласно третьей таблице связи состояний, в которой хранится соответствующая связь между каждым целевым кольцевым лучом, соответствующим каждой предварительно определенной длине волны, и рабочим напряжением второй линзы 10018 фокусировки напряжения для детектируемого места детектируемого объекта.
[227] Согласно вариантам осуществления настоящего изобретения, поскольку целевые кольцевые лучи, соответствующие разным предварительно определенным длинам волн, имеют разные дисперсии, один и тот же исходный кольцевой луч, соответствующий разным предварительно определенным длинам волн, может формировать целевые кольцевые лучи с разными размерами после прохождения через вторую линзу 10018 фокусировки напряжения с одинаковым рабочим напряжением. Для того, чтобы позволить одному и тому же исходному кольцевому лучу, соответствующему разным предварительно определенным длинам волн, формировать целевые кольцевые лучи с одинаковыми размерами после прохождения через вторую линзу 10018 фокусировки напряжения, рабочее напряжение второй линзы 10018 фокусировки напряжения необходимо регулировать в соответствии с предварительно определенными длинами волн, то есть рабочее напряжение второй линзы 10018 фокусировки напряжения имеет соответствующую взаимосвязь с каждым целевым кольцевым лучом, соответствующим каждой предварительно определенной длине волны.
[228] На основе вышесказанного может быть предварительно составлена третья таблица связи состояний, в которой хранится соответствующая связь между каждым целевым кольцевым лучом, соответствующим каждой предварительно определенной длине волны, и рабочим напряжением второй линзы 10018 фокусировки напряжения для детектируемого места детектируемого объекта. Контроллер 1002 может генерировать команду рабочего состояния согласно третьей таблице связи состояний, и затем управлять рабочими состояниями второй линзы 10018 фокусировки напряжения и источника 1000 света согласно команде рабочего состояния.
[229] Согласно вариантам осуществления настоящего изобретения устройство 1001 регулировки луча может содержать микролинзовую решетку 10014 и линзу 10015, формирующую изображение. В качестве альтернативы устройство 1001 регулировки луча может содержать коническую линзу 10017 и вторую линзу 10018 фокусировки напряжения. Под управлением контроллера 1002 вышеупомянутые компоненты действуют совместно с источником 1000 света соответственно для формирования целевого кольцевого луча посредством проекции луча.
[230] Как показано на фиг. 3 и на фиг. 6– 8, согласно вариантам осуществления настоящего изобретения фоточувствительная поверхность находится в контакте с поверхностью детектируемого места или фоточувствительная поверхность не находится в контакте с поверхностью детектируемого места.
[231] Согласно вариантам осуществления настоящего изобретения контактное детектирование может включать следующие способы. В первом способе фоточувствительная поверхность находится в контакте с поверхностью детектируемого места, как показано на фиг. 6. Во втором способе фоточувствительная поверхность расположена на первом конце световодной части, а второй конец световодной части находится в контакте с поверхностью детектируемого места, как показано на фиг. 7.
[232] Бесконтактное детектирование может включать два способа. В первом способе фоточувствительная поверхность не находится в контакте с поверхностью детектируемого места и фоточувствительная поверхность не получает первое значение интенсивности света через световодную часть, как показано на фиг. 3. Во втором способе фоточувствительная поверхность расположена на первом конце световодной части, а второй конец световодной части не находится в контакте с поверхностью детектируемого места, как показано на фиг. 8.
[233] Как показано на фиг. 28 и на фиг. 29, согласно вариантам осуществления настоящего изобретения устройство 1 определения расстояния при неинвазивном детектировании элемента ткани дополнительно содержит световодную часть 12. Фоточувствительная поверхность расположена на первом конце световодной части 12, второй конец световодной части 12 находится в контакте или не находится в контакте с поверхностью детектируемого места, и первый конец световодной части 12 и второй конец световодной части 12 являются противоположными торцами.
[234] Согласно вариантам осуществления настоящего изобретения, чтобы достичь отсутствия контакта между фоточувствительной поверхностью и поверхностью детектируемого места, фоточувствительная поверхность может быть расположена на первом конце световодной части 12. Как показано на фиг. 28, на фиг. 28 представлено схематическое изображение еще одной фоточувствительной поверхности, не контактирующей с поверхностью детектируемого места, согласно вариантам осуществления настоящего изобретения. Если фоточувствительная поверхность расположена на первом конце световодной части, а второй конец световодной части не находится в контакте с поверхностью детектируемого места, то можно считать, что неинвазивное детектирование элемента ткани является бесконтактным детектированием. Как показано на фиг. 29, на фиг. 29 представлено схематическое изображение еще одной фоточувствительной поверхности, не контактирующей с поверхностью детектируемого места, согласно вариантам осуществления настоящего изобретения. Следует отметить, что для описания расположения фоточувствительной поверхности на первом конце световодной части 12 может быть сделана ссылка на соответствующую приведенную выше часть, и подробности здесь не повторяются.
[235] Как показано на фиг. 30, согласно вариантам осуществления настоящего изобретения фоточувствительная поверхность не находится в контакте с поверхностью детектируемого места. Устройство 1 определения расстояния при неинвазивном детектировании элемента ткани дополнительно содержит первую часть 13, блокирующую свет. Первая часть 13, блокирующая свет, расположена в области зазора между фоточувствительной поверхностью и поверхностью детектируемого места, и первая часть 13, блокирующая свет, находится в контакте с поверхностью детектируемого места. Фоточувствительная поверхность расположена на внутренней стороне первой части, блокирующей свет 13. Первая часть 13, блокирующая свет, является неотъемлемой частью фоточувствительной поверхности или первая часть 13, блокирующая свет, отделена от фоточувствительной поверхности.
[236] Согласно вариантам осуществления настоящего изобретения, если фоточувствительная поверхность не находится в контакте с поверхностью детектируемого места, может быть сгенерирован свет, отраженный от поверхности. На основе этого для дополнительного повышения точности детектирования интерференционный свет необходимо экранировать следующим образом. Устройство может быть дополнительно снабжено первой частью 13, блокирующей свет. Первая часть 13, блокирующая свет, специально расположена в области зазора между фоточувствительной поверхностью и поверхностью детектируемого места, и первая часть 13, блокирующая свет, расположена вокруг фоточувствительной поверхности, так что фоточувствительная поверхность расположена на внутренней стороне первой части 13, блокирующей свет, при этом обеспечивая то, чтобы первая часть 13, блокирующая свет, находилась в контакте с поверхностью детектируемого места, как показано на фиг. 30. На фиг. 30 представлено еще одно схематическое изображение экранирования интерференционного света согласно вариантам осуществления настоящего изобретения.
[237] Согласно вариантам осуществления настоящего изобретения первая часть 13, блокирующая свет, является неотъемлемой частью фоточувствительной поверхности, то есть первая часть 13, блокирующая свет, может служить периферией фоточувствительной поверхности, которая является неотъемлемой частью фоточувствительной поверхности. Кроме того, первая часть 13, блокирующая свет, также может быть отделена от фоточувствительной поверхности. Приведенное выше может быть установлено согласно фактическим ситуациям, которые конкретно не ограничены здесь.
[238] Согласно вариантам осуществления настоящего изобретения фоточувствительная поверхность принимает только диффузно-рассеянный свет. Поскольку диффузно-рассеянный свет несет достоверную информацию, точность детектирования может быть дополнительно повышена.
[239] Как показано на фиг. 31, согласно вариантам осуществления настоящего изобретения второй конец световодной части 12 не находится в контакте с поверхностью детектируемого места. Устройство 1 определения расстояния при неинвазивном детектировании элемента ткани дополнительно содержит вторую часть 14, блокирующую свет. Вторая часть 14, блокирующая свет, расположена в области зазора между световодной частью 12 и поверхностью детектируемого места, первый конец второй части 14, блокирующей свет, находится в контакте со вторым концом световодной части 12, второй конец второй части 14, блокирующей свет, находится в контакте с поверхностью детектируемого места, а второй конец второй части 14, блокирующей свет, и первый конец второй части 14, блокирующей свет, являются противоположными торцами.
[240] Согласно вариантам осуществления настоящего изобретения, если фоточувствительная поверхность расположена на первом конце световодной части, а второй конец световодной части не находится в контакте с поверхностью детектируемого места, то можно считать, что неинвазивное детектирование элемента ткани является бесконтактным детектированием. Свет, отраженный от поверхности, может быть сгенерирован при бесконтактном детектировании. Таким образом, для дополнительного повышения точности детектирования интерференционный свет необходимо экранировать следующим образом. Устройство 1 определения расстояния при неинвазивном детектировании элемента ткани может быть дополнительно снабжено второй частью 14, блокирующей свет. Первый конец второй части 14, блокирующей свет, находится в контакте со вторым концом световодной части 12, и второй конец второй части 14, блокирующей свет, находится в контакте с поверхностью детектируемого места, чтобы обеспечить то, что интерференционному свету трудно проникать в световодную часть 12 и затем приниматься фоточувствительной поверхностью, как показано на фиг. 31. На фиг. 31 представлено еще одно схематическое изображение экранирования интерференционного света согласно вариантам осуществления настоящего изобретения.
[241] Согласно вариантам осуществления настоящего изобретения фоточувствительная поверхность может принимать только диффузно-рассеянный свет. Поскольку диффузно-рассеянный свет несет достоверную информацию, точность детектирования может быть дополнительно повышена.
[242] На фиг. 20 представлено схематическое структурное изображение устройства определения расстояния при неинвазивном детектировании элемента ткани согласно вариантам осуществления настоящего изобретения. Такие варианты осуществления могут быть применены для повышения точности детектирования концентрации детектируемого элемента ткани.
[243] Как показано на фиг. 20, устройство 1 определения расстояния при неинвазивном детектировании элемента ткани содержит второй модуль 15 получения и второй модуль 16 определения. Конструкция и принцип работы будут описаны ниже со ссылкой на сопроводительные графические материалы.
[244] Второй модуль 15 получения используется для получения оптического параметра ткани на каждой предварительно определенной длине волны из по меньшей мере одной предварительно определенной длины волны, и взаимосвязи изменения оптического параметра ткани, вызванной изменением концентрации детектируемого элемента ткани для детектируемого места детектируемого объекта.
[245] Второй модуль 16 определения используется для определения каждого расстояния измерения и/или каждого опорного расстояния в соответствии с оптическим параметром ткани при каждой предварительно определенной длине волны и взаимосвязью изменения оптического параметра ткани, вызванной изменением концентрации детектируемого элемента ткани.
[246] Согласно вариантам осуществления настоящего изобретения за конкретными процедурами обработки второго модуля 15 получения и второго модуля 16 определения можно обратиться к описанию соответствующей части способа определения расстояния в неинвазивном детектировании элемента ткани, описанного выше, и подробности здесь не повторяются.
[247] На фиг. 32 представлено схематическое структурное изображение устройства неинвазивного детектирования для элемента ткани согласно вариантам осуществления настоящего изобретения. Такие варианты осуществления могут быть применены для повышения точности детектирования концентрации детектируемого элемента ткани.
[248] Как показано на фиг. 32, устройство 2 неинвазивного детектирования для элемента ткани содержит датчик 17 интенсивности света и процессор 18. Конструкция и принцип работы будут описаны ниже со ссылкой на сопроводительные графические материалы.
[249] Датчик 17 интенсивности света используется для получения второго измеренного значения интенсивности света, соответствующего каждой предварительно определенной длине волны на расстоянии измерения, и/или второго опорного значения интенсивности света, соответствующего каждой предварительно определенной длине волны на опорном расстоянии для детектируемого места детектируемого объекта. Каждое расстояние измерения и каждое опорное расстояние определены согласно устройству определения расстояния при неинвазивном детектировании элемента ткани согласно вариантам осуществления настоящего изобретения, и предварительно определенная длина волны включает по меньшей мере одну предварительно определенную длину волны.
[250] Процессор 18 используется для определения концентрации детектируемого элемента ткани согласно второму измеренному значению интенсивности света и/или второму опорному значению интенсивности света, соответствующим каждой предварительно определенной длине волны.
[251] Согласно вариантам осуществления настоящего изобретения за конкретными процедурами обработки датчика 17 интенсивности света и процессора 18 можно обратиться к описанию соответствующей части способа неинвазивного детектирования для элемента ткани, описанного выше, и подробности здесь не повторяются.
[252] Как показано на фиг. 33, согласно вариантам осуществления настоящего изобретения датчик 17 интенсивности света содержит генератор 170 кольцевого луча и генератор 171 сигнала об интенсивности света.
[253] Генератор 170 кольцевого луча используется для формирования измерительного кольцевого луча и/или опорного кольцевого луча, соответствующего каждой предварительно определенной длине волны на поверхности детектируемого места для детектируемого места детектируемого объекта. Внутренний радиус или внешний радиус каждого измерительного кольцевого луча является соответствующим расстоянием измерения, внутренний радиус или внешний радиус каждого опорного кольцевого луча является соответствующим опорным расстоянием, и каждый измерительный кольцевой луч и каждый опорный кольцевой луч имеют один и тот же геометрический центр.
[254] Генератор 171 сигнала об интенсивности света выполнен с возможностью получения, на основании фоточувствительной поверхности, соответствующей геометрическому центру, второго измеренного значения интенсивности света, излучаемого с поверхности детектируемого места после прохождения каждого измерительного кольцевого луча через детектируемое место, и/или второго опорного значения интенсивности света, излучаемого с поверхности детектируемого места после прохождения каждого опорного кольцевого луча через детектируемое место.
[255] Согласно вариантам осуществления настоящего изобретения за конкретными процедурами обработки генератора 170 кольцевого луча и генератора 171 сигнала об интенсивности света можно обратиться к описанию соответствующей части способа неинвазивного детектирования для элемента ткани, описанного выше, и подробности здесь не повторяются.
[256] Как показано на фиг. 34, согласно вариантам осуществления настоящего изобретения генератор 170 кольцевого луча содержит источник 1000 света, устройство 1001 регулировки луча и контроллер 1002. Контроллер 1002 может быть соединен с возможностью связи с источником 1000 света и устройством 1001 регулировки луча соответственно.
[257] Контроллер 1002 используется, для детектируемого места детектируемого объекта, для управления источником 1000 света и устройством 1001 регулировки луча согласно соответствующей команде рабочего состояния для совместного действия для формирования измерительного кольцевого луча и/или опорного кольцевого луча, соответствующих каждой предварительно определенной длине волны на поверхности детектируемого места.
[258] Согласно вариантам осуществления настоящего изобретения команда рабочего состояния может быть командой для управления рабочими состояниями источника 1000 света и устройства 1001 регулировки луча. Контроллер 1002 может управлять, для детектируемого места детектируемого объекта, источником 1000 света и устройством 1001 регулировки луча для совместного действия для формирования измерительного кольцевого луча и/или опорного кольцевого луча, соответствующих каждой предварительно определенной длине волны на поверхности детектируемого места согласно соответствующей команде рабочего состояния. Можно понять, что контроллер 1002 может управлять источником 1000 света и устройством 1001 регулировки луча, согласно соответствующей команде рабочего состояния, для совместного действия для формирования измерительного кольцевого луча и/или опорного кольцевого луча для каждой предварительно определенной длины волны.
[259] Как показано на фиг. 23, согласно вариантам осуществления настоящего изобретения устройство 1001 регулировки луча может содержать сканирующее зеркало 10010 MEMS.
[260] Контроллер 1002 используется, для детектируемого места детектируемого объекта, для управления источником 1000 света, согласно соответствующей команде рабочего состояния, для излучения падающего луча, соответствующего каждой предварительно определенной длине волны, и проецирования каждого падающего луча на сканирующее зеркало 10010 MEMS, и управления сканирующим зеркалом 10010 MEMS, согласно соответствующей команде рабочего состояния, для преобразования каждого падающего луча в соответствующий измерительный кольцевой луч и/или соответствующий опорный кольцевой луч и проецирования каждого измерительного кольцевого луча и/или каждого опорного кольцевого луча на поверхность детектируемого места.
[261] Согласно вариантам осуществления настоящего изобретения источник 1000 света и сканирующее зеркало 10010 MEMS могут действовать совместно для формирования каждого измерительного кольцевого луча и/или каждого опорного кольцевого луча под управлением контроллера 1002. Сканирующее зеркало 10010 MEMS может быть двухмерным сканирующим зеркалом MEMS. То есть контроллер 1002 может одновременно управлять источником 1000 света и сканирующим зеркалом 10010 MEMS для получения двухмерного сканированного изображения, состоящего из предварительно определенных точек пикселей посредством прогрессивного сканирования. Если траектория, сформированная предварительно определенными точками пикселей, представляет собой измеренное кольцо, то двухмерное сканированное изображение представляет собой изображение измерительного кольца. Если траектория, сформированная предварительно определенными точками пикселей, представляет собой опорное кольцо, то двухмерное сканированное изображение представляет собой изображение опорного кольца. Вышеупомянутый способ сканирования позволяет определять моменты времени отображения и пространственные координаты предварительно определенных точек пикселей в изображении измерительного кольца, и позволяет определять моменты времени отображения и пространственные координаты предварительно определенных точек пикселей в опорном кольцевом луче. Пространственные координаты предварительно определенных точек пикселей в изображении измерительного кольца и пространственные координаты предварительно определенных точек пикселей в изображении опорного кольца определяют углом отражения сканирующего зеркала 10010 MEMS. Моменты времени отображения предварительно определенных точек пикселей в изображении измерительного кольца и моменты времени отображения предварительно определенных точек пикселей в изображении опорного кольца определяют источником 1000 света. То есть источник 1000 света и сканирующее зеркало 10010 MEMS могут синхронно управляться контроллером 1002, чтобы достичь соответствия между моментом времени отображения и пространственной координатой предварительно определенной точки пикселя. Разные предварительно определенные точки пикселей могут формировать соответствующее изображение измерительного кольца и изображение опорного кольца. Каждое изображение измерительного кольца и каждое изображение опорного кольца может быть спроецировано на детектируемое место для формирования каждого измерительного кольцевого луча и каждого опорного кольцевого луча. Следует отметить, что пространственная координата и момент времени отображения предварительно определенной точки пикселя могут быть реализованы в команде рабочего состояния.
[262] Как показано на фиг. 24, согласно вариантам осуществления настоящего изобретения устройство 1001 регулировки луча содержит узел 10011 гальванического сканирования.
[263] Контроллер 1002 используется, для детектируемого места детектируемого объекта, для управления источником 1000 света согласно соответствующей команде рабочего состояния для излучения падающего луча, соответствующего каждой предварительно определенной длине волны, и проецирования каждого падающего луча на узел 10011 гальванического сканирования, и управления узлом 10011 гальванического сканирования согласно соответствующей команде рабочего состояния для преобразования каждого падающего луча в соответствующий измерительный кольцевой луч и/или соответствующий опорный кольцевой луч и проецирования каждого измерительного кольцевого луча и/или каждого опорного кольцевого луча на поверхность детектируемого места.
[264] Согласно вариантам осуществления настоящего изобретения источник 1000 света и узел 10011 гальванического сканирования могут действовать совместно для формирования каждого измерительного кольцевого луча и/или каждого опорного кольцевого луча под управлением контроллера 1002. То есть падающий луч, соответствующий каждой предварительно определенной длине волны, излучаемый источником 1000 света под управлением контроллера 1002 согласно команде рабочего состояния может быть спроецирован на положение сканирования узлом 10011 гальванического сканирования под управлением контроллера 1002 согласно команде рабочего состояния. Падающий луч представляет собой точечное световое пятно на положении сканирования. При круговом сканировании точечного светового пятна на 360° для формирования кольцевого луча с переменным размером может быть сформирован соответствующий измерительный кольцевой луч и/или соответствующий опорный кольцевой луч.
[265] Как показано на фиг. 24, согласно вариантам осуществления настоящего изобретения узел 10011 гальванического сканирования содержит первый двухосевой гальванический сканер 100110 и второй двухосевой гальванический сканер 100111.
[266] Контроллер 1002 используется, для детектируемого места детектируемого объекта, для управления источником 1000 света согласно соответствующей команде рабочего состояния для излучения падающего луча, соответствующего каждой предварительно определенной длине волны, и проецирования каждого падающего луча на первый двухосевой гальванический сканер 100110.
[267] Контроллер 1002 используется для управления первым двухосевым гальваническим сканером 100110 согласно соответствующей команде рабочего состояния для отражения первого предварительно определенного угла вдоль оси X так, что каждый падающий луч отражается под первым предварительно определенным углом в направлении оси X, и проецирования отраженного падающего луча на второй двухосевой гальванический сканер 100111.
[268] Контроллер 1002 используется для управления вторым двухосевым гальваническим сканером 100111 согласно команде рабочего состояния для отражения второго предварительно определенного угла вдоль оси Y для формирования каждого измерительного кольцевого луча и/или каждого опорного кольцевого луча, и проецирования каждого измерительного кольцевого луча и/или каждого опорного кольцевого луча на поверхность детектируемого места.
[269] Согласно вариантам осуществления настоящего изобретения узел 10011 гальванического сканирования содержит первый двухосевой гальванический сканер 100110 и второй двухосевой гальванический сканер 100111, и контроллер 1002 может управлять первым двухосевым гальваническим сканером 100110 и вторым двухосевым гальваническим сканером 100111 для получения отражения падающего луча на 360°. Контроллер 1002 может управлять первым двухосевым гальваническим сканером 100110 для отражения первого предварительно определенного угла вдоль оси X так, что каждый падающий луч отражается под первым предварительно определенным углом в направлении оси X вместе с первым двухосевым гальваническим сканером 100110, и проецирования отраженного падающего луча на второй двухосевой гальванический сканер 100111. Контроллер 1002 может управлять вторым двухосевым гальваническим сканером 100111 для отражения второго предварительно определенного угла вдоль оси Y так, что каждый отраженный падающий луч отражается под вторым предварительно определенным углом в направлении оси Y вместе со вторым двухосевым гальваническим сканером 100111, чтобы сформировать каждый измерительный кольцевой луч и/или каждый опорный кольцевой луч. Вышеупомянутый первый предварительно определенный угол и второй предварительно определенный угол могут быть предусмотрены с возможностью определения того, что падающий луч спроецирован на положение сканирования, и падающий луч представляет собой точечное световое пятно на положении сканирования. Контроллер 1002 может управлять углом отражения и направлением отражения первого двухосевого гальванического сканера 100110 и второго двухосевого гальванического сканера 100111 для достижения вращения точечного светового пятна на 360° на поверхности детектируемого места, то есть для получения кругового сканирования. Кроме того, кольцевой луч с переменным размером формируется посредством сканирования, то есть может быть сформирован соответствующий измерительный кольцевой луч и/или соответствующий опорный кольцевой луч.
[270] Согласно вариантам осуществления настоящего изобретения контроллер 1002 может управлять первым двухосевым гальваническим сканером 100110 и вторым двухосевым гальваническим сканером 100111 согласно другим командам рабочего состояния для отражения других углов отражения и отражения в другие направления отражения, чтобы сформировать каждый измерительный кольцевой луч и/или каждый опорный кольцевой луч.
[271] Согласно вариантам осуществления настоящего изобретения размер первого двухосевого гальванического сканера 100110 может быть меньше размера второго двухосевого гальванического сканера 100111. Гальванометр, на который сначала спроецирован падающий луч, может обычно иметь небольшой размер, который должен быть больше только размера падающего луча. Гальванометр, на который сначала спроецирован падающий луч, можно называть первым двухосевым гальваническим сканером. Соответственно, гальванометр, на который позже спроецирован падающий луч, можно называть вторым двухосевым гальваническим сканером. Поскольку скорость сканирования по оси X высокая и гальванометр с небольшой массой имеет небольшую инерцию, первый двухосевой гальванический сканер может быть выполнен с возможностью сканирования по оси X. Поскольку второй двухосевой гальванический сканер должен принимать полный диапазон, отсканированный первым двухосевым гальваническим сканером, размер второго двухосевого гальванического сканера должен быть больше первого двухосевого гальванического сканера, и второй двухосевой гальванический сканер может быть выполнен с возможностью сканирования по оси Y. В вариантах осуществления настоящего изобретения первый двухосевой гальванический сканер 100110 можно использовать как первый двухосевой гальванический сканер, и второй двухосевой гальванический сканер 100111 можно использовать как второй двухосевой гальванический сканер. На основе вышесказанного первый двухосевой гальванический сканер 100110 может быть выполнен с возможностью сканирования по оси X, и второй двухосевой гальванический сканер 100111 может быть выполнен с возможностью сканирования по оси Y.
[272] Как показано на фиг. 25, согласно вариантам осуществления настоящего изобретения устройство 1001 регулировки луча содержит вращающееся зеркало 10012 и первую линзу 10013 фокусировки напряжения.
[273] Контроллер 1002 используется, для детектируемого места детектируемого объекта, для управления источником 1000 света согласно соответствующей команде рабочего состояния для излучения падающего луча, соответствующего каждой предварительно определенной длине волны, и проецирования каждого падающего луча на вращающееся зеркало 10012.
[274] Контроллер 1002 используется для управления согласно соответствующей команде рабочего состояния вращающимся зеркалом 10012 для вращения под разными углами, чтобы преобразовать каждый падающий луч в соответствующий исходный кольцевой луч, и проецирования каждого исходного кольцевого луча на первую линзу 10013 фокусировки напряжения.
[275] Контроллер 1002 используется для управления согласно соответствующей команде рабочего состояния первой линзой 10013 фокусировки напряжения для регулировки внутреннего радиуса или внешнего радиуса каждого исходного кольцевого луча в соответствии с соответствующим расстоянием измерения, чтобы получить каждый измерительный кольцевой луч, и/или регулировки внутреннего радиуса или внешнего радиуса каждого исходного кольцевого луча в соответствии с соответствующим опорным расстоянием, чтобы получить каждый опорный кольцевой луч, и проецирования каждого измерительного кольцевого луча и/или каждого опорного кольцевого луча на детектируемое место.
[276] Согласно вариантам осуществления настоящего изобретения источник 1000 света, вращающееся зеркало 10012 и первая линза 10013 фокусировки напряжения могут действовать совместно для формирования каждого измерительного кольцевого луча и/или каждого опорного кольцевого луча под управлением контроллера 1002. Как показано на фиг. 25, источник 1000 света можно использовать для излучения каждого падающего луча, соответствующего каждой предварительно определенной длине волны, и каждый падающий луч преобразуется в соответствующий исходный кольцевой луч вращающимся зеркалом 10012 для непрерывного прохождения, то есть контроллер 1002 может управлять вращающимся зеркалом 10012 для достижения вращательного сканирования каждого падающего луча на 360°, чтобы сформировать исходный кольцевой луч. Каждый исходный кольцевой луч проходит через первую линзу 10013 фокусировки напряжения для формирования соответствующего измерительного кольцевого луча и/или соответствующего опорного кольцевого луча. Размер исходного кольцевого луча регулируется посредством управления фокусной длиной первой линзы 10013 фокусировки напряжения, чтобы сформировать каждый измерительный кольцевой луч и/или каждый опорный кольцевой луч.
[277] Согласно вариантам осуществления настоящего изобретения каждая команда рабочего состояния генерируется контроллером 1000 согласно первой таблице связи, в которой хранится/хранятся соответствующая связь между каждым измерительным кольцевым лучом, соответствующим каждой предварительно определенной длине волны, и рабочим напряжением первой линзы 10013 фокусировки напряжения и/или соответствующая связь между каждым опорным кольцевым лучом, соответствующим каждой предварительно определенной длине волны, и рабочим напряжением первой линзы 10013 фокусировки напряжения для детектируемого места детектируемого объекта.
[278] Согласно вариантам осуществления настоящего изобретения может быть предварительно составлена первая таблица связи, в которой хранится/хранятся соответствующая связь между каждым измерительным кольцевым лучом, соответствующим каждой предварительно определенной длине волны, и рабочим напряжением первой линзы 10013 фокусировки напряжения и/или соответствующая связь между каждым опорным кольцевым лучом, соответствующим каждой предварительно определенной длине волны, и рабочим напряжением первой линзы 10013 фокусировки напряжения для детектируемого места детектируемого объекта. Контроллер 1002 может генерировать команду рабочего состояния согласно первой таблице связи, и затем управлять рабочими состояниями вращающегося зеркала 10012, первой линзы 10013 фокусировки напряжения и источника 1000 света согласно команде рабочего состояния.
[279] Согласно вариантам осуществления настоящего изобретения вышеупомянутый устройство 1001 регулировки луча может содержать сканирующее зеркало 10010 MEMS. В качестве альтернативы устройство 1001 регулировки луча может содержать узел 10011 гальванического сканирования. В качестве альтернативы устройство 1001 регулировки луча может содержать вращающееся зеркало 10012 и первую линзу 10013 фокусировки напряжения. Под управлением контроллера 1002 вышеупомянутые компоненты могут соответственно действовать совместно с источником 1000 света для формирования измерительного кольцевого луча и/или опорного кольцевого луча посредством точечного сканирования светового пятна.
[280] Как показано на фиг. 26, согласно вариантам осуществления настоящего изобретения устройство 1001 регулировки луча содержит микролинзовую решетку 10014 и линзу 10015, формирующую изображение.
[281] Контроллер 1002 используется, для детектируемого места детектируемого объекта, для управления источником 1000 света согласно соответствующей команде рабочего состояния для излучения падающего луча, соответствующего каждой предварительно определенной длине волны, и проецирования каждого падающего луча на микролинзовую решетку 10014, и управления микролинзовой решеткой 10014 согласно соответствующей команде рабочего состояния для преобразования каждого падающего луча в соответствующий измерительный кольцевой луч и/или соответствующий опорный кольцевой луч и проецирования каждого измерительного кольцевого луча и/или каждого опорного кольцевого луча на поверхность детектируемого места через линзу 10015, формирующую изображение.
[282] Согласно вариантам осуществления настоящего изобретения источник 1000 света и микролинзовая решетка 10014 могут действовать совместно для формирования каждого измерительного кольцевого луча и/или каждого опорного кольцевого луча под управлением контроллера 1002. То есть контроллер 1002 управляет согласно команде рабочего состояния микролинзой, соответствующей каждому измерительному кольцевому лучу в микролинзовой решетке 10014, и/или микролинзой, соответствующей каждому опорному кольцевому лучу в микролинзовой решетке 10014, так, чтобы она была в открытом состоянии, и падающий луч, соответствующий каждой предварительно определенной длине волны, которая излучается источником 1000 света под управлением контроллера 1002, может быть отражен микролинзой в открытом состоянии для формирования каждого соответствующего измерительного кольцевого луча и/или каждого соответствующего опорного кольцевого луча. Каждый измерительный кольцевой луч и/или каждый опорный кольцевой луч может быть спроецирован на детектируемое место через линзу 10015, формирующую изображение. Посредством управления микролинзой в открытом состоянии в микролинзовой решетке 10014 может быть сформирован каждый измерительный кольцевой луч и/или каждый опорный кольцевой луч.
[283] Как показано на фиг. 26, согласно вариантам осуществления настоящего изобретения устройство 1001 регулировки луча дополнительно содержит группу 10016 линз для расширения луча.
[284] Контроллер 1002 используется, для детектируемого места детектируемого объекта, для управления источником 1000 света согласно соответствующей команде рабочего состояния для излучения падающего луча, соответствующего каждой предварительно определенной длине волны, и проецирования каждого падающего луча на группу 10016 линз для расширения луча.
[285] Группа 10016 линз для расширения луча используется для расширения каждого падающего луча и проецирования каждого расширенного падающего луча на микролинзовую решетку 10014 так, что проекция каждого падающего луча на микролинзовую решетку 10014 покрывает микролинзовую решетку 10014.
[286] Контроллер 1002 используется для управления согласно соответствующей команде рабочего состояния микролинзовой решеткой 10014 для преобразования каждого падающего луча в соответствующий измерительный кольцевой луч и/или соответствующий опорный кольцевой луч, и проецирования каждого измерительного кольцевого луча и/или каждого опорного кольцевого луча на поверхность детектируемого места через линзу 10015, формирующую изображение.
[287] Согласно вариантам осуществления настоящего изобретения для достижения того, чтобы проекция падающего луча на микролинзовую решетку 10014 покрывала микролинзовую решетку 10014, группа 10016 линз для расширения луча может быть предусмотрена для расширения падающего луча.
[288] Согласно вариантам осуществления настоящего изобретения каждая команда рабочего состояния генерируется контроллером 1002 согласно второй таблице связи, в которой хранится/хранятся соответствующая связь между каждым измерительным кольцевым лучом, соответствующим каждой предварительно определенной длине волны, и микролинзой в открытом состоянии в микролинзовой решетке 10014 и/или соответствующая связь между каждым опорным кольцевым лучом, соответствующим каждой предварительно определенной длине волны, и микролинзой в открытом состоянии в микролинзовой решетке 10014 для детектируемого места детектируемого объекта.
[289] Согласно вариантам осуществления настоящего изобретения может быть предварительно составлена вторая таблица связи, в которой хранится/хранятся соответствующая связь между каждым измерительным кольцевым лучом, соответствующим каждой предварительно определенной длине волны, и микролинзой в открытом состоянии в микролинзовой решетке 10014 и/или соответствующая связь между каждым опорным кольцевым лучом, соответствующим каждой предварительно определенной длине волны, и микролинзой в открытом состоянии в микролинзовой решетке 10014 для детектируемого места детектируемого объекта. Контроллер 1002 может генерировать команду рабочего состояния согласно второй таблице связи, и затем управлять рабочими состояниями микролинзовой решетки 10014 и источника 1000 света согласно команде рабочего состояния.
[290] Как показано на фиг. 27, согласно вариантам осуществления настоящего изобретения устройство 1001 регулировки луча содержит коническую линзу 10017 и вторую линзу 10018 фокусировки напряжения.
[291] Контроллер 1002 используется, для детектируемого места детектируемого объекта, для управления источником 1000 света согласно соответствующей команде рабочего состояния для излучения падающего луча, соответствующего каждой предварительно определенной длине волны, и проецирования каждого падающего луча на коническую линзу 10017.
[292] Коническая линза 10017 используется для преобразования каждого падающего луча в конический луч и проецирования каждого конического луча на вторую линзу 10018 фокусировки напряжения для отображения в виде каждого исходного кольцевого луча второй линзой 10018 фокусировки напряжения.
[293] Контроллер 1002 используется для управления второй линзой 10018 фокусировки напряжения согласно соответствующей команде рабочего состояния для регулировки внутреннего радиуса или внешнего радиуса каждого исходного кольцевого луча в соответствии с соответствующим расстоянием измерения, чтобы получить каждый измерительный кольцевой луч, и/или регулировки внутреннего радиуса или внешнего радиуса каждого исходного кольцевого луча в соответствии с соответствующим опорным расстоянием, чтобы получить каждый опорный кольцевой луч, и проецирования каждого измерительного кольцевого луча и/или каждого опорного кольцевого луча на детектируемое место.
[294] Согласно вариантам осуществления настоящего изобретения источник 1000 света и вторая линза 10018 фокусировки напряжения могут действовать совместно для формирования каждого измерительного кольцевого луча и/или каждого опорного кольцевого луча под управлением контроллера 1002. Как показано на фиг. 27, источник 1000 света можно использовать для излучения падающего луча для каждой предварительно определенной длины волны. Каждый падающий луч проходит через коническую линзу 10017 и преобразуется в соответствующий конический луч для непрерывного прохождения. Каждый конический луч проецируется на приемную поверхность для формирования соответствующего исходного кольцевого луча. Каждый исходный кольцевой луч проходит через вторую линзу 10018 фокусировки напряжения для формирования соответствующего измерительного кольцевого луча и/или соответствующего опорного кольцевого луча. Как описано выше, посредством управления фокусной длиной второй линзы 10018 фокусировки напряжения может быть сформирован каждый измерительный кольцевой луч и/или каждый опорный кольцевой луч.
[295] Согласно вариантам осуществления настоящего изобретения каждая команда рабочего состояния генерируется контроллером 1002 согласно третьей таблице связи, в которой хранится/хранятся соответствующая связь между каждым измерительным кольцевым лучом, соответствующим каждой предварительно определенной длине волны, и рабочим напряжением второй линзы 10018 фокусировки напряжения и/или соответствующая связь между каждым опорным кольцевым лучом, соответствующим каждой предварительно определенной длине волны, и рабочим напряжением второй линзы 10018 фокусировки напряжения для детектируемого места детектируемого объекта.
[296] Согласно вариантам осуществления настоящего изобретения может быть предварительно составлена третья таблица связи, в которой хранится/хранятся соответствующая связь между каждым измерительным кольцевым лучом, соответствующим каждой предварительно определенной длине волны, и рабочим напряжением второй линзы 10018 фокусировки напряжения и/или соответствующая связь между каждым опорным кольцевым лучом, соответствующим каждой предварительно определенной длине волны, и рабочим напряжением второй линзы 10018 фокусировки напряжения для детектируемого места детектируемого объекта. Контроллер 1002 может генерировать команду рабочего состояния согласно третьей таблице связи, и затем управлять рабочими состояниями второй линзы 10018 фокусировки напряжения и источника 1000 света согласно команде рабочего состояния.
[297] Согласно вариантам осуществления настоящего изобретения процессор 18 выполнен с возможностью выполнения, для каждой предварительно определенной длины волны, операции определения разности между вторым измеренным значением интенсивности света и вторым опорным значением интенсивности света на предварительно определенной длине волны, чтобы получить значение разности интенсивности света; и определения концентрации детектируемого элемента ткани согласно значению разности интенсивности света при каждой предварительно определенной длине волны.
[298] Согласно вариантам осуществления настоящего изобретения за конкретными процедурами обработки субмодуля определения разности и субмодуля определения можно обратиться к описанию соответствующей части способа неинвазивного детектирования для элемента ткани, описанного выше, который не будет подробно описан здесь.
[299] Как показано на фиг. 7, фиг. 8, фиг. 15 и фиг. 16, согласно вариантам осуществления настоящего изобретения фоточувствительная поверхность находится в контакте с поверхностью детектируемого места или фоточувствительная поверхность не находится в контакте с поверхностью детектируемого места.
[300] Согласно вариантам осуществления настоящего изобретения контактное детектирование может включать два способа. В первом способе фоточувствительная поверхность находится в контакте с поверхностью детектируемого места, как показано на фиг. 16. Во втором способе фоточувствительная поверхность расположена на первом конце световодной части, а второй конец световодной части находится в контакте с поверхностью детектируемого места, как показано на фиг. 7. Бесконтактное детектирование может включать два способа. В первом способе фоточувствительная поверхность не находится в контакте с поверхностью детектируемого места и фоточувствительная поверхность не получает первое значение интенсивности света через световодную часть, как показано на фиг. 15. Во втором способе фоточувствительная поверхность расположена на первом конце световодной части, а второй конец световодной части не находится в контакте с поверхностью детектируемого места, как показано на фиг. 8.
[301] Как показано на фиг. 28 и фиг. 29, согласно вариантам осуществления настоящего изобретения устройство 2 неинвазивного детектирования для элемента ткани дополнительно содержит световодную часть 12. Фоточувствительная поверхность расположена на первом конце световодной части 12, первый конец световодной части 12 не находится в контакте с поверхностью детектируемого места, второй конец световодной части 12 находится в контакте или не находится в контакте с поверхностью детектируемого места, и первый конец световодной части 12 и второй конец световодной части 12 являются противоположными торцами.
[302] Согласно вариантам осуществления настоящего изобретения следует отметить, что для описания расположения фоточувствительной поверхности на первом конце световодной части 12 может быть сделана ссылка на соответствующую приведенную выше часть, и подробности здесь не повторяются.
[303] Как показано на фиг. 35, согласно вариантам осуществления настоящего изобретения фоточувствительная поверхность не находится в контакте с поверхностью детектируемого места. Устройство 2 неинвазивного детектирования для элемента ткани дополнительно содержит первую часть 13, блокирующую свет. Первая часть 13, блокирующая свет, расположена в области зазора между фоточувствительной поверхностью и поверхностью детектируемого места, и первая часть 13, блокирующая свет, находится в контакте с поверхностью детектируемого места. Фоточувствительная поверхность расположена на внутренней стороне первой части, блокирующей свет 13. Первая часть 13, блокирующая свет, является неотъемлемой частью фоточувствительной поверхности или первая часть 13, блокирующая свет, отделена от фоточувствительной поверхности.
[304] Согласно вариантам осуществления настоящего изобретения для конкретного описания первой части 13, блокирующей свет, может быть сделана ссылка на соответствующую приведенную выше часть, и подробности здесь не повторяются.
[305] Как показано на фиг. 31, согласно вариантам осуществления настоящего изобретения второй конец световодной части 12 не находится в контакте с поверхностью детектируемого места. Устройство 2 неинвазивного детектирования для элемента ткани дополнительно содержит вторую часть 14, блокирующую свет. Вторая часть 14, блокирующая свет, расположена в области зазора между световодной частью 12 и поверхностью детектируемого места, первый конец второй части 14, блокирующей свет, находится в контакте со вторым концом световодной части 12, второй конец второй части 14, блокирующей свет, находится в контакте с поверхностью детектируемого места, а второй конец второй части 14, блокирующей свет, и первый конец второй части 14, блокирующей свет, являются противоположными торцами.
[306] Согласно вариантам осуществления настоящего изобретения для описания второй части 14, блокирующей свет, может быть сделана ссылка на соответствующую приведенную выше часть, и подробности здесь не повторяются.
[307] На фиг. 36 представлено схематическое структурное изображение носимого устройства согласно вариантам осуществления настоящего изобретения. Такие варианты осуществления могут быть применены для повышения точности детектирования концентрации детектируемого элемента ткани.
[308] Как показано на фиг. 36, носимое устройство 3 содержит основную часть 30 и устройство 2 неинвазивного детектирования для элемента ткани согласно вариантам осуществления настоящего изобретения. Устройство 2 неинвазивного детектирования для элемента ткани предусмотрено на основной части 30, и устройство 2 неинвазивного детектирования для элемента ткани содержит датчик 17 интенсивности света и процессор 18. Конструкция и принцип работы будут описаны ниже со ссылкой на сопроводительные графические материалы.
[309] Носимое устройство 3 носится на детектируемом месте.
[310] Датчик 17 интенсивности света используется, для детектируемого места детектируемого объекта, для получения второго измеренного значения интенсивности света, соответствующего каждой предварительно определенной длине волны по меньшей мере одной предварительно определенной длины волны на расстоянии измерения, и/или второго опорного значения интенсивности света, соответствующего каждой предварительно определенной длине волны на опорном расстоянии. Каждое расстояние измерения и каждое опорное расстояние определяют согласно устройствам, описанным в вариантах осуществления настоящего изобретения.
[311] Процессор 18 используется для определения концентрации детектируемого элемента ткани согласно второму измеренному значению интенсивности света и/или второму опорному значению интенсивности света, соответствующим каждой предварительно определенной длине волны.
[312] Согласно вариантам осуществления настоящего изобретения устройство 2 неинвазивного детектирования для элемента ткани может быть расположено на основной части 30. Когда устройство 2 неинвазивного детектирования для элемента ткани необходимо использовать для детектирования элемента ткани, носимое устройство 3 можно носить на детектируемом месте. Кроме того, детектирование устройства 2 неинвазивного детектирования для элемента ткани легко подвергается воздействиям условия детектирования и, таким образом, может быть оказано влияние на точность детектирования. Для обеспечения стабильности условия детектирования и дополнительного повышения точности детектирования, устройство 2 неинвазивного детектирования для элемента ткани может быть закреплено так, что связь между положениями детектируемого места и устройства 2 неинвазивного детектирования для элемента ткани представляет собой предварительно определенную связь. Как описано выше, положение устройства 1 неинвазивного детектирования для элемента ткани может быть зафиксировано на основной части 30, и стабильность условия детектирования может быть обеспечена, чтобы улучшить точность детектирования. Дополнительно за конструкцией и принципом работы устройства 2 неинвазивного детектирования для элемента ткани можно обратиться к приведенному выше описанию устройства 2 неинвазивного детектирования, и подробности здесь не повторяются.
[313] Согласно вариантам осуществления настоящего изобретения носимое устройство 3 может дополнительно содержать дисплейный модуль, соединенный с возможностью связи с процессором 18. Процессор 18 может передавать концентрацию детектируемого элемента ткани в дисплейный модуль, и дисплейный модуль может отображать концентрацию детектируемого элемента ткани, чтобы концентрацию детектируемого элемента ткани можно было получить детектируемым объектом с помощью дисплейного модуля. Дополнительно носимое устройство 3 может дополнительно содержать голосовой модуль, соединенный с возможностью связи с процессором 18. Процессор 18 может передавать концентрацию детектируемого элемента ткани в голосовой модуль, и голосовой модуль может генерировать голосовую команду согласно концентрации детектируемого элемента ткани, и голосовую команду можно воспроизводить, чтобы концентрацию детектируемого элемента ткани можно было получить детектируемым объектом.
[314] В техническом решении согласно данному варианту осуществления вследствие существенного уменьшения в размере устройства детектирования, устройство детектирования может быть установлено на носимом устройстве, и затем его можно легко носить и фиксировать на детектируемом месте, чтобы можно было обеспечить стабильность условия детектирования, можно было улучшить стабильность условия детектирования и можно было достичь портативного детектирования. На основании этого, поскольку расстояние измерения и/или опорное расстояние, соответствующее каждой предварительно определенной длине волны, может быть точно определено для детектируемого места детектируемого объекта, второе измеренное значение интенсивности света и/или второе опорное значение интенсивности света может быть точно определено согласно точно определенному расстоянию измерения и/или опорному расстоянию. Концентрацию детектируемого элемента ткани можно определять согласно точно определенным второму измеренному значению интенсивности света и/или второму опорному значению интенсивности света, чтобы улучшить точность детектирования.
[315] На фиг. 37 представлено схематическое структурное изображение системы неинвазивного детектирования для элемента ткани согласно вариантам осуществления настоящего изобретения. Такие варианты осуществления могут быть применены для повышения точности детектирования концентрации детектируемого элемента ткани.
[316] Как показано на фиг. 37, система неинвазивного детектирования для элемента ткани содержит носимое устройство 3, описанное в вариантах осуществления настоящего изобретения, и терминал 4. Носимое устройство 3 содержит основную часть 30 и устройство 2 неинвазивного детектирования для элемента ткани, и устройство 2 неинвазивного детектирования для элемента ткани предусмотрено на основной части 30. Устройство 2 неинвазивного детектирования для элемента ткани содержит датчик 17 интенсивности света и процессор 18. Процессор 18 может быть соединенным с возможностью связи, соответственно, с датчиком 17 интенсивности света и терминалом 4. Его конструкция и принцип работы будут описаны ниже со ссылкой на сопроводительные графические материалы.
[317] Носимое устройство 3 носится на детектируемом месте.
[318] Датчик 17 интенсивности света используется, для детектируемого места детектируемого объекта, для получения второго измеренного значения интенсивности света, соответствующего каждой предварительно определенной длине волны по меньшей мере одной предварительно определенной длины волны на расстоянии измерения, и/или второго опорного значения интенсивности света, соответствующего каждой предварительно определенной длине волны на опорном расстоянии. Каждое расстояние измерения и каждое опорное расстояние определяют согласно устройству, описанному в вариантах осуществления настоящего изобретения.
[319] Процессор 18 используется для обработки каждого второго измеренного значения интенсивности света и/или каждого второго опорного значения интенсивности света для каждой предварительно определенной длины волны, чтобы получить каждое обработанное второе измеренное значение интенсивности света и/или каждое обработанное второе опорное значение интенсивности света для каждой предварительно определенной длины волны, и передачи каждого обработанного второго измеренного значения интенсивности света и/или каждого обработанного второго опорного значения интенсивности света для каждой предварительно определенной длины волны на терминал 4.
[320] Терминал 4 используется для определения концентрации детектируемого элемента ткани в соответствии с каждым обработанным вторым измеренным значением интенсивности света и/или каждым обработанным вторым опорным значением интенсивности света для каждой предварительно определенной длины волны.
[321] Согласно вариантам осуществления настоящего изобретения, отличающимся от предыдущих вариантов осуществления, носимое устройство 3 и терминал 4 могут действовать совместно для определения концентрации детектируемого элемента ткани для снижения стоимости устройства 2 неинвазивного детектирования для элемента ткани. То есть процессор 18 может обрабатывать каждое второе измеренное значение интенсивности света и/или каждое второе опорное значение интенсивности света для каждой предварительно определенной длины волны для получения каждого обработанного второго измеренного значения интенсивности света и/или каждого обработанного второго опорного значения интенсивности света для каждой предварительно определенной длины волны, и передавать каждое обработанное второе измеренное значение интенсивности света и/или каждое обработанное второе опорное значение интенсивности света для каждой предварительно определенной длины волны на терминал 4. Терминал 4 может определять концентрацию детектируемого элемента ткани в соответствии с каждым обработанным вторым измеренным значением интенсивности света и/или каждым обработанным вторым опорным значением интенсивности света для каждой предварительно определенной длины волны. Операция обработки каждого второго измеренного значения интенсивности света и/или каждого второго опорного значения интенсивности света процессором 18 может включать преобразование тока в напряжение, усиление и аналого-цифровое преобразование и т. д. Терминал 4 может определять концентрацию детектируемого элемента ткани согласно каждому обработанному второму измеренному значению интенсивности света и/или каждому обработанному второму опорному значению интенсивности света с использованием способов, схожих со способами неинвазивного детектирования для элемента ткани, описанные в вариантах осуществления настоящего изобретения, которые не будут подробно описаны здесь. Дополнительно конструкция и принцип работы носимого устройства 3 могут относиться к приведенному выше описанию носимого устройства 3, и подробности здесь не повторяются.
[322] Согласно вариантам осуществления настоящего изобретения терминал 4 может дополнительно отображать концентрацию детектируемого элемента ткани, чтобы концентрацию детектируемого элемента ткани можно было получить детектируемым объектом. Терминал 4 может дополнительно генерировать голосовую команду, содержащую концентрацию детектируемого элемента ткани, и воспроизводить голосовую команду, чтобы концентрацию детектируемого элемента ткани можно было получить детектируемым объектом.
[323] Согласно вариантам осуществления настоящего изобретения в дополнение к определению концентрации детектируемого элемента ткани, благодаря совместному действию терминала 4 и носимого устройства 3, концентрацию детектируемого элемента ткани можно также определить благодаря совместному действию облачного сервера и носимого устройства 3.
[324] Конкретные варианты осуществления настоящего изобретения, описанные выше, не ограничивают объем правовой охраны настоящего изобретения. Любые другие соответствующие изменения и модификации, сделанные согласно технической концепции настоящего изобретения, следует включить в объем правовой охраны согласно формуле настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ, УСТРОЙСТВО, СИСТЕМА И НОСИМОЕ УСТРОЙСТВО НЕИНВАЗИВНОГО ДЕТЕКТИРОВАНИЯ ДЛЯ ЭЛЕМЕНТА ТКАНИ | 2019 |
|
RU2795554C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЭЛЕМЕНТА ТКАНИ И НОСИМЫЙ ПРИБОР | 2021 |
|
RU2830103C1 |
| УСТРОЙСТВО И СПОСОБ АНАЛИЗА ВЕЩЕСТВА | 2019 |
|
RU2813964C2 |
| СПОСОБ ИЗМЕРЕНИЯ ГЛЮКОЗЫ В КРОВИ, УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ГЛЮКОЗЫ В КРОВИ И НОСИМЫЙ ПРИБОР ДЛЯ ИЗМЕРЕНИЯ ГЛЮКОЗЫ В КРОВИ | 2021 |
|
RU2826213C1 |
| СПЕКТРОСКОПИЧЕСКАЯ ГОЛОВКА ДЛЯ ЦИФРОВОГО ОПТИЧЕСКОГО БЛОКА УСТРОЙСТВА ДЛЯ ИДЕНТИФИКАЦИИ МИКРООРГАНИЗМОВ В ИССЛЕДУЕМОМ БИОЛОГИЧЕСКОМ ОБРАЗЦЕ | 2024 |
|
RU2825977C1 |
| Способ и устройство для автономного дистанционного определения концентрации атмосферных газовых составляющих | 2020 |
|
RU2736178C1 |
| ЦИФРОВОЙ ОПТИЧЕСКИЙ БЛОК, УСТРОЙСТВО И СИСТЕМА ДЛЯ ИДЕНТИФИКАЦИИ МИКРООРГАНИЗМОВ В ИССЛЕДУЕМОМ БИОЛОГИЧЕСКОМ ОБРАЗЦЕ | 2024 |
|
RU2825976C1 |
| УСТРОЙСТВО И СПОСОБ ДЕТЕКТИРОВАНИЯ ФЛУОРЕСЦЕНТНОГО И ФОСФОРЕСЦЕНТНОГО СВЕЧЕНИЯ | 1997 |
|
RU2170420C2 |
| ЛАЗЕРНОЕ ХИРУРГИЧЕСКОЕ УСТРОЙСТВО И СПОСОБ ЕГО ИСПОЛЬЗОВАНИЯ | 1996 |
|
RU2113827C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ИЗВЛЕЧЕНИЯ ФИЗИОЛОГИЧЕСКОЙ ИНФОРМАЦИИ | 2013 |
|
RU2653799C2 |
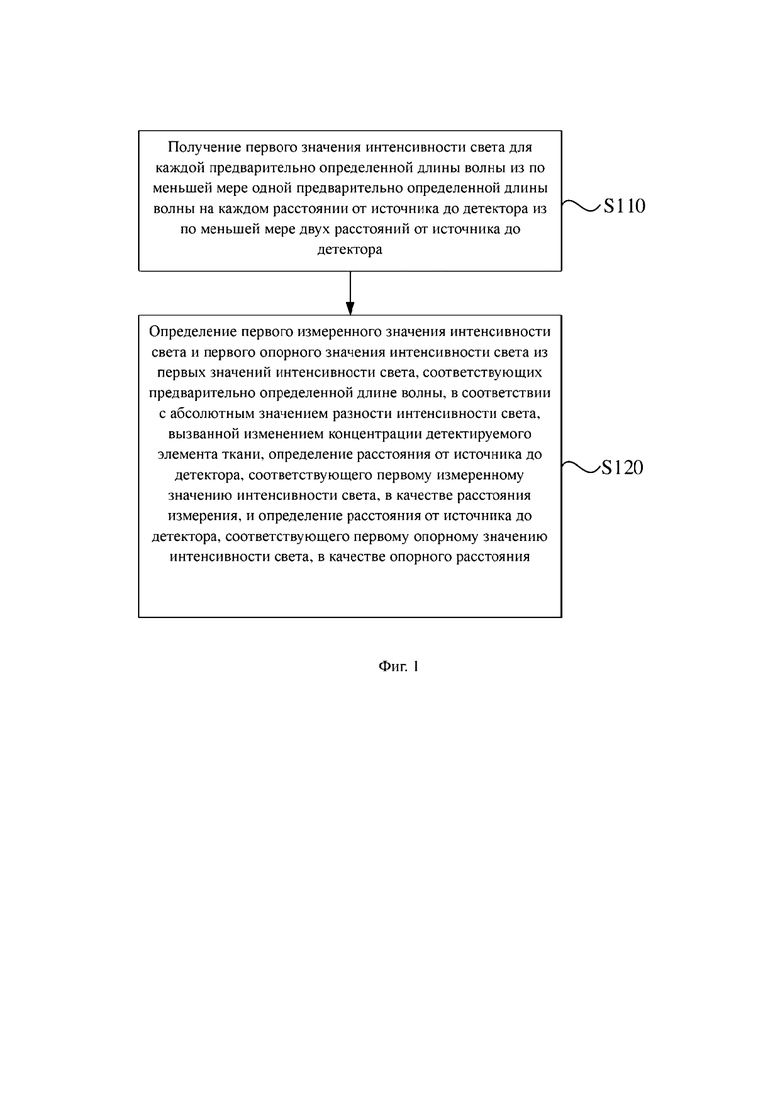
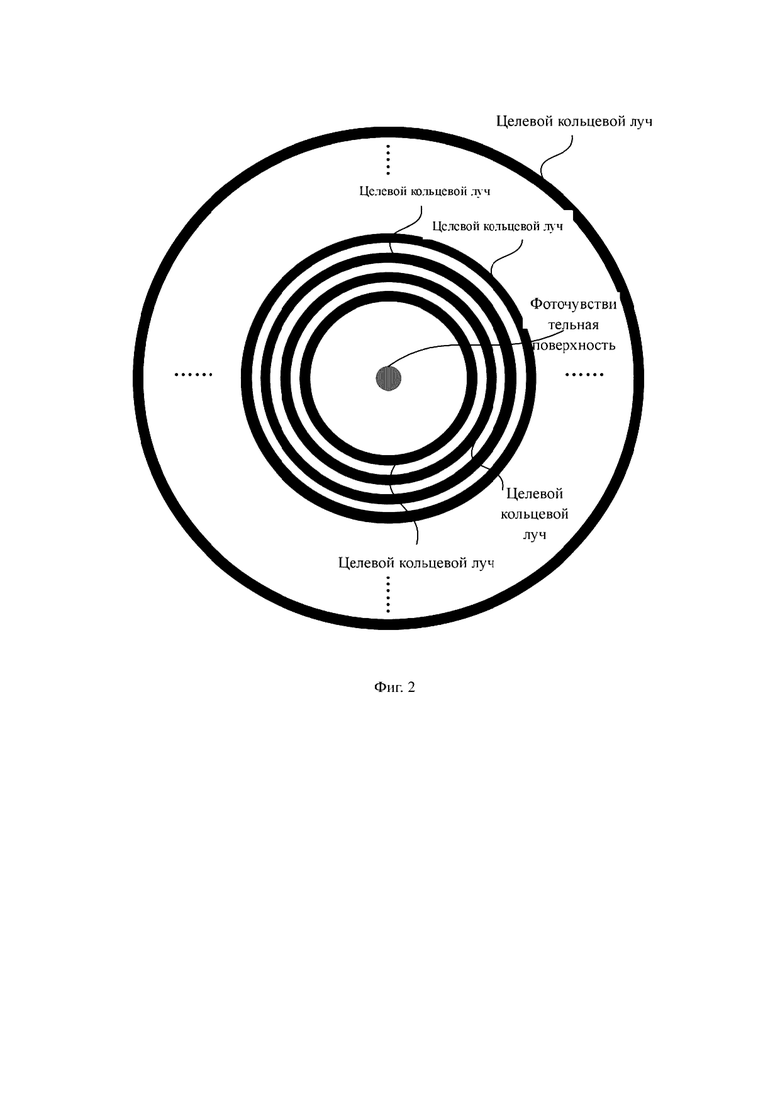
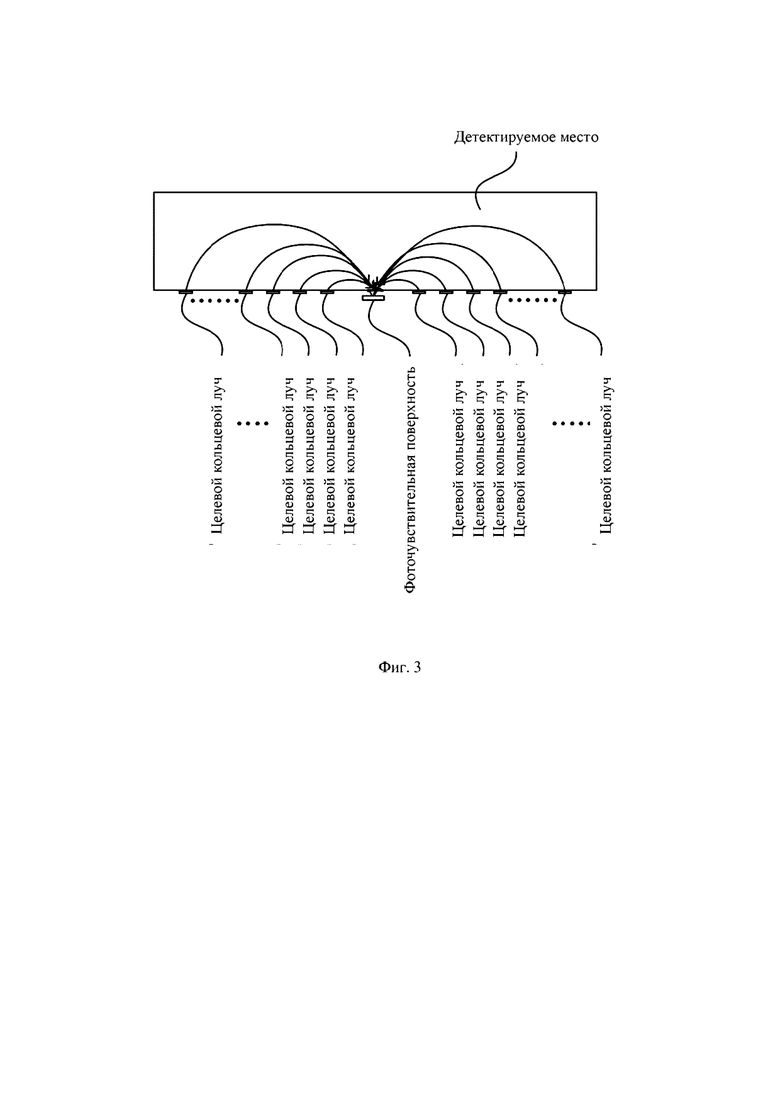
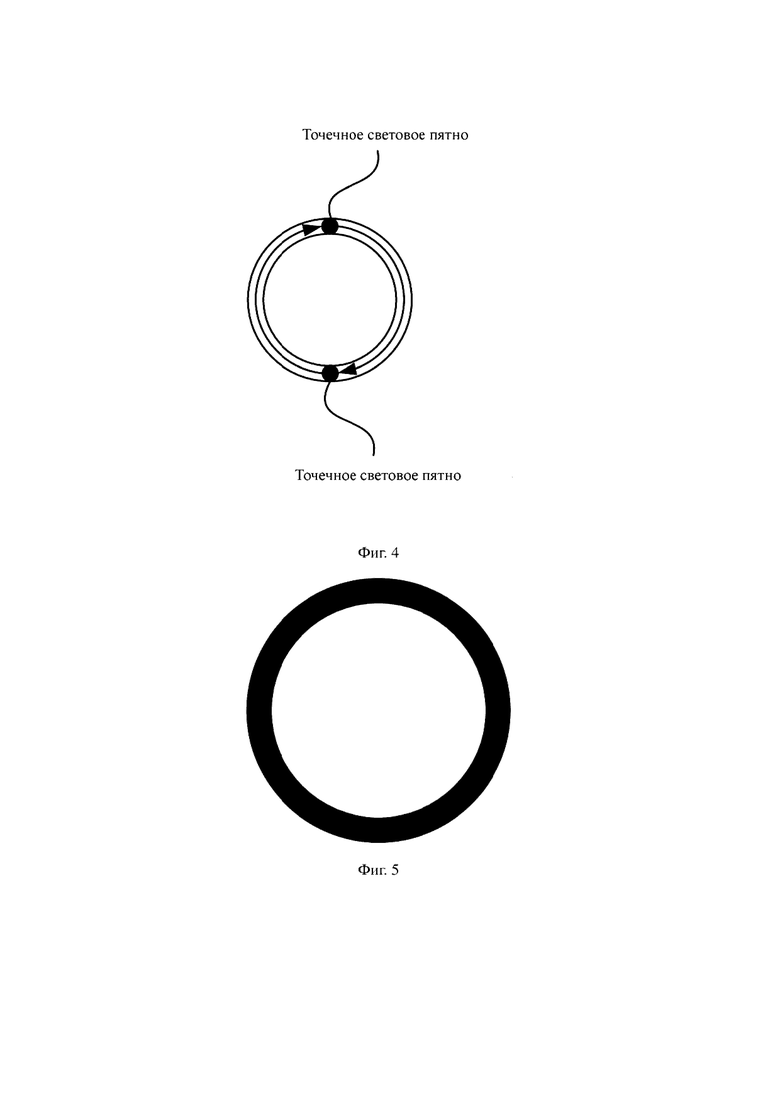
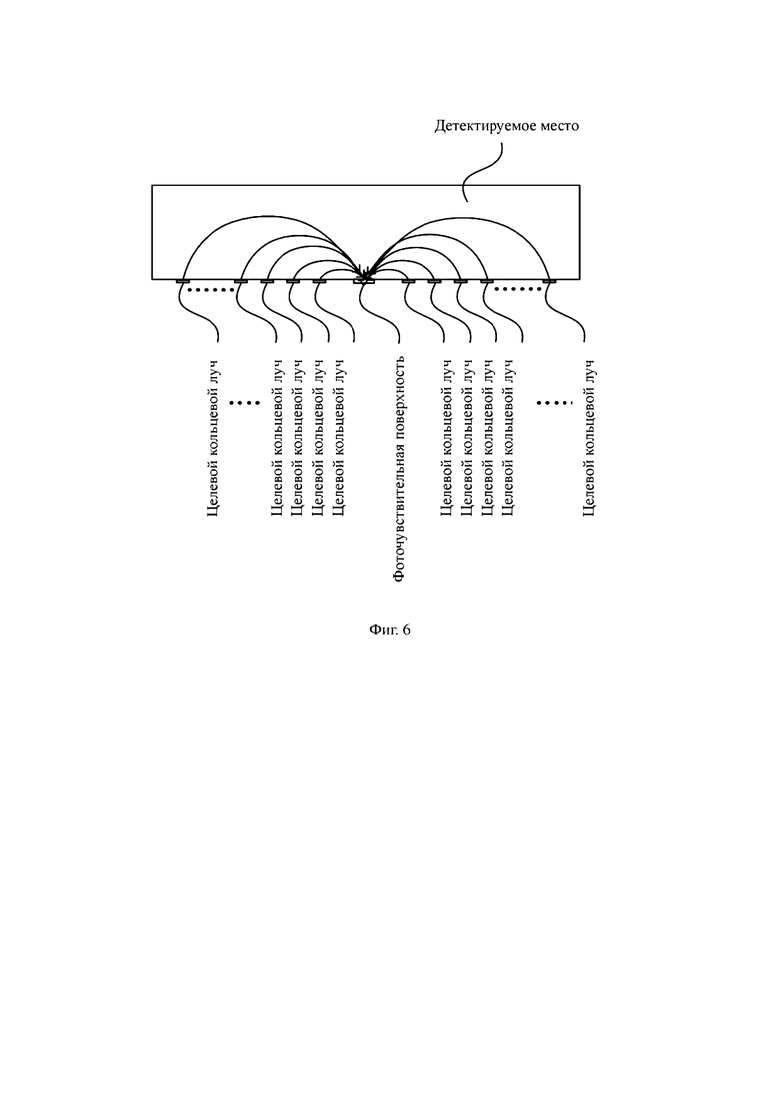
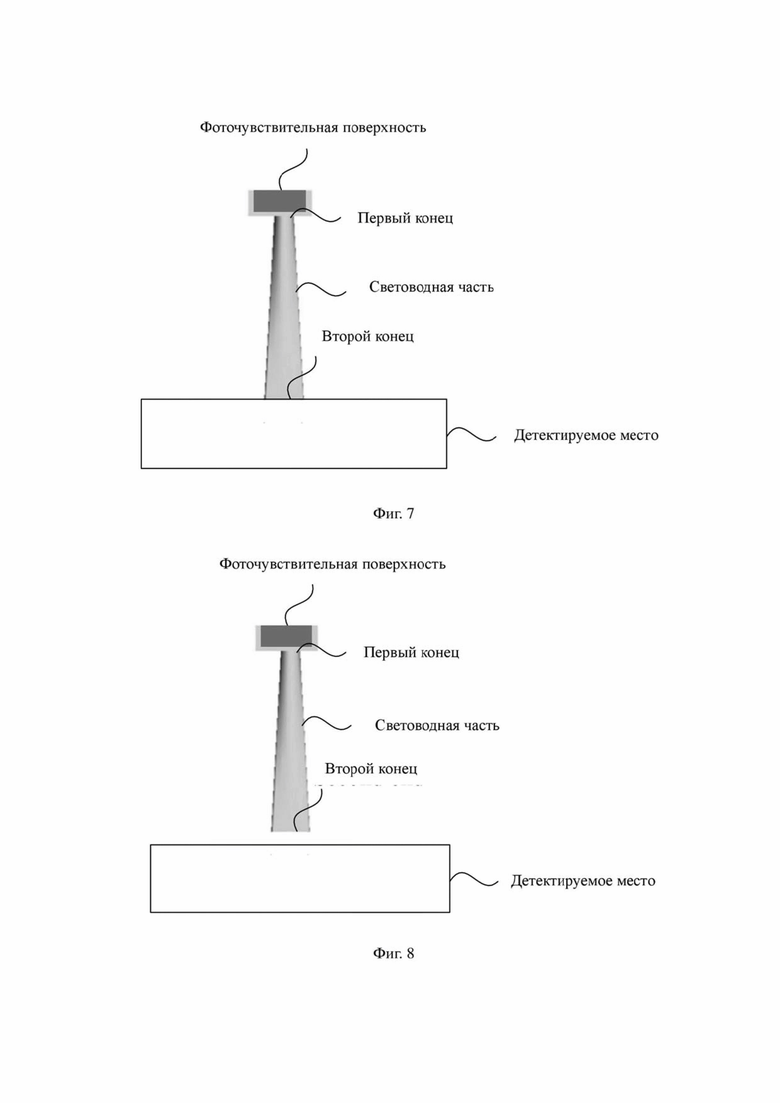
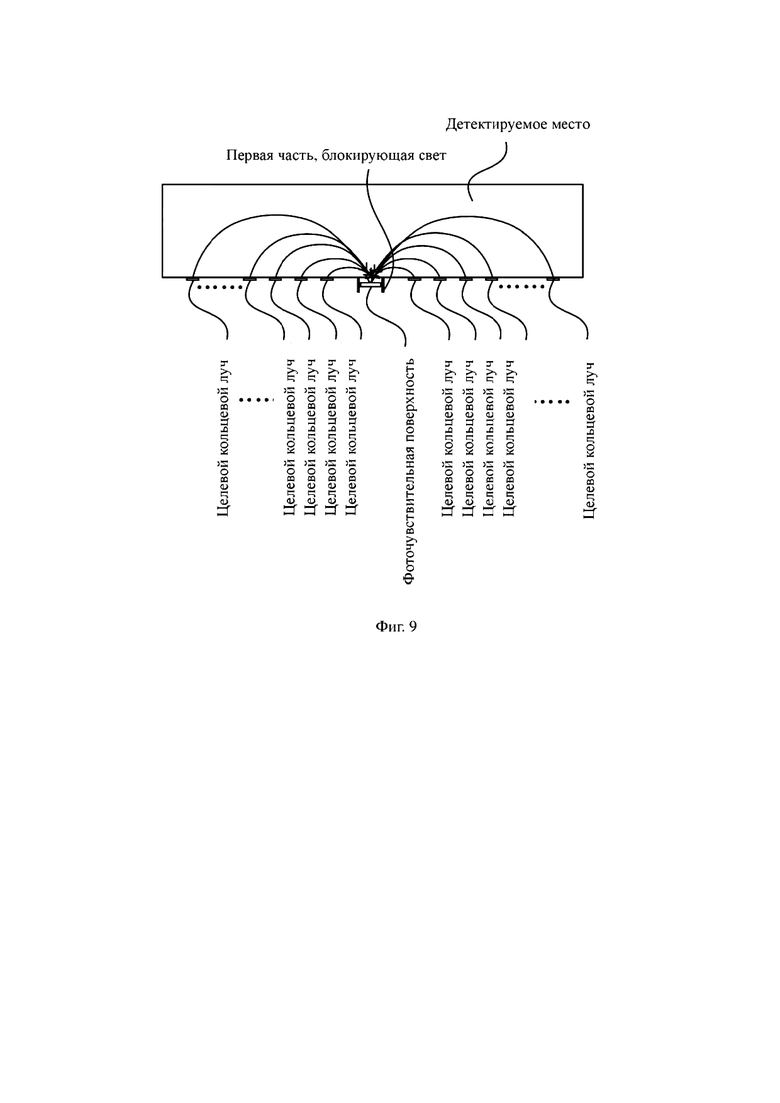
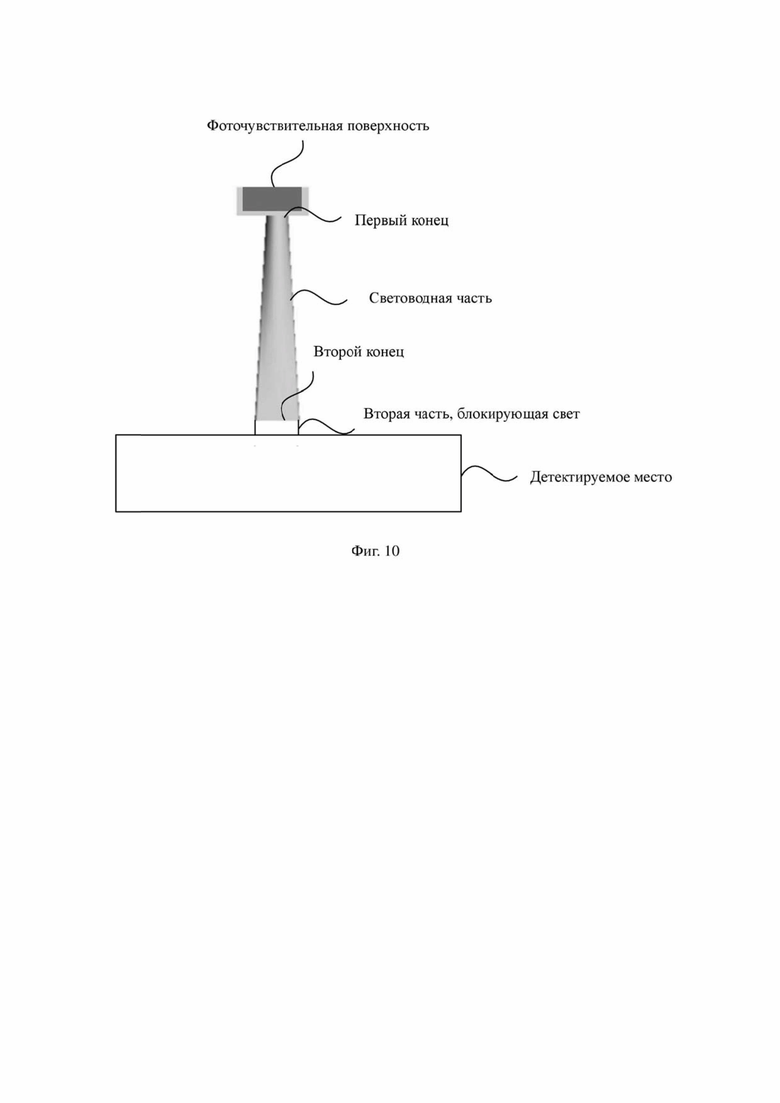
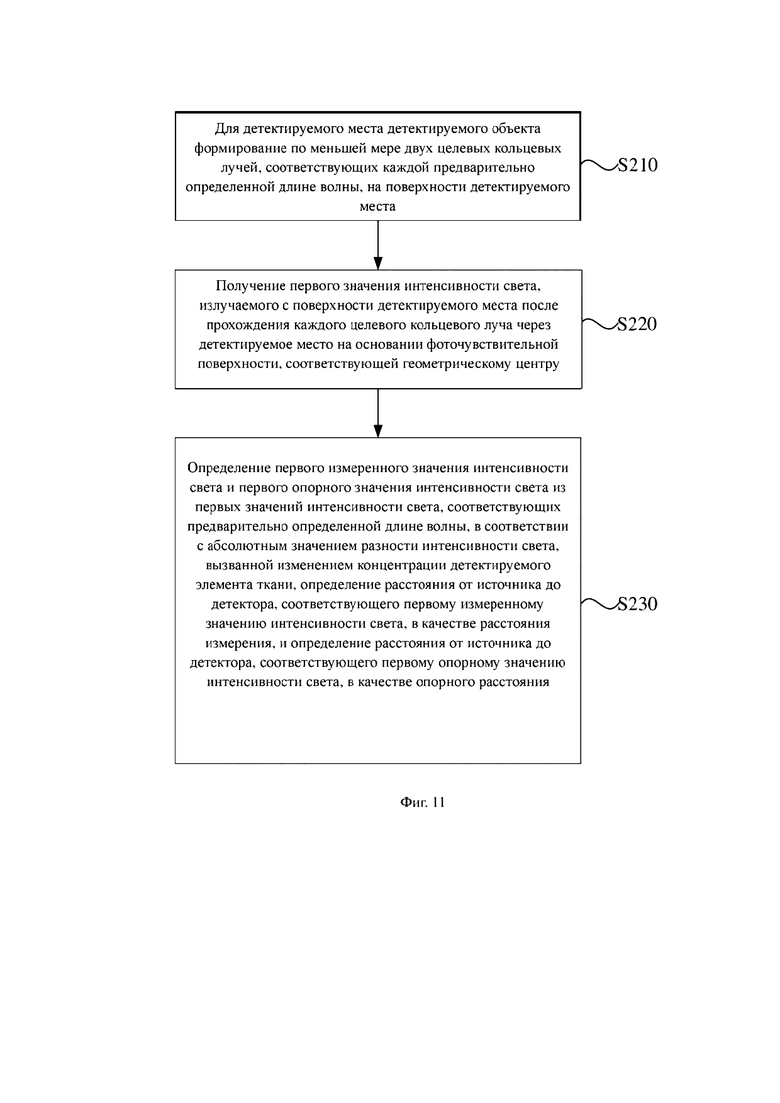
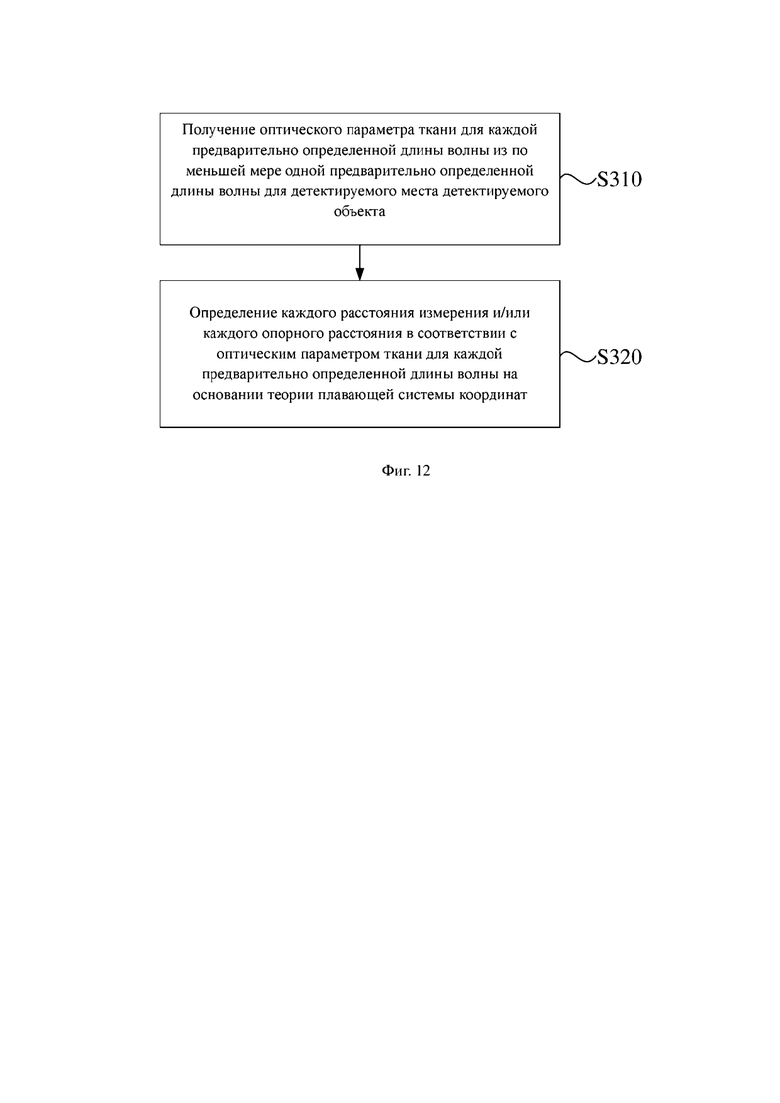
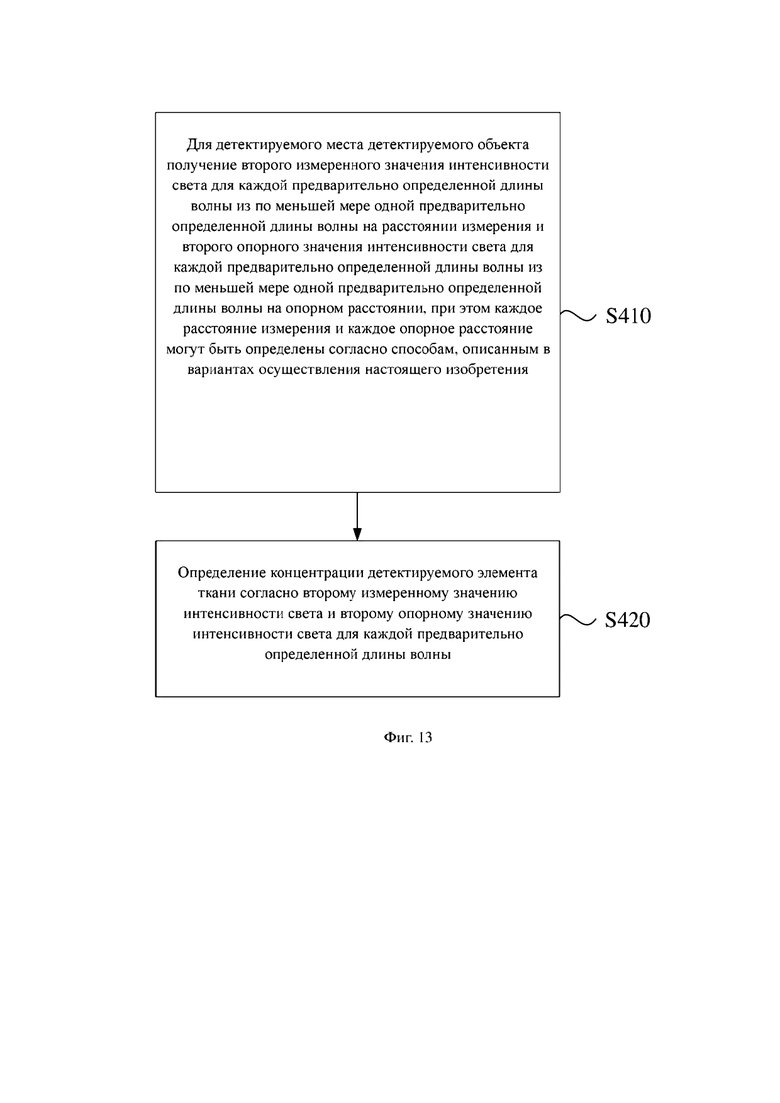
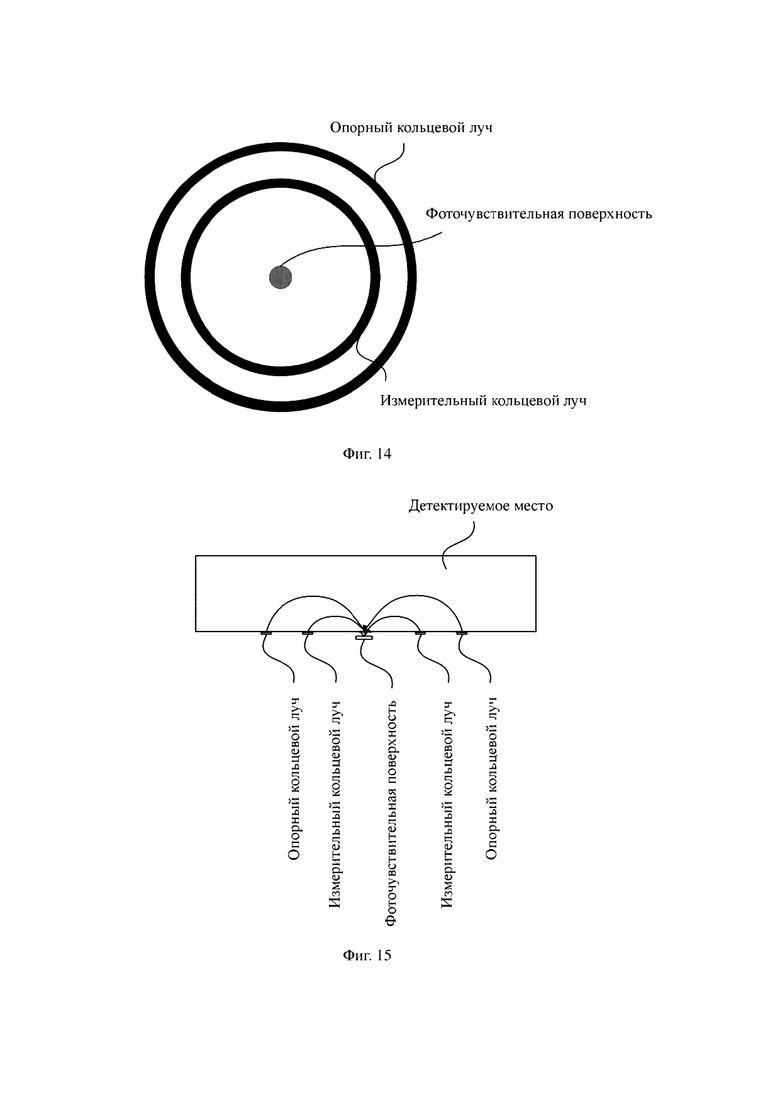
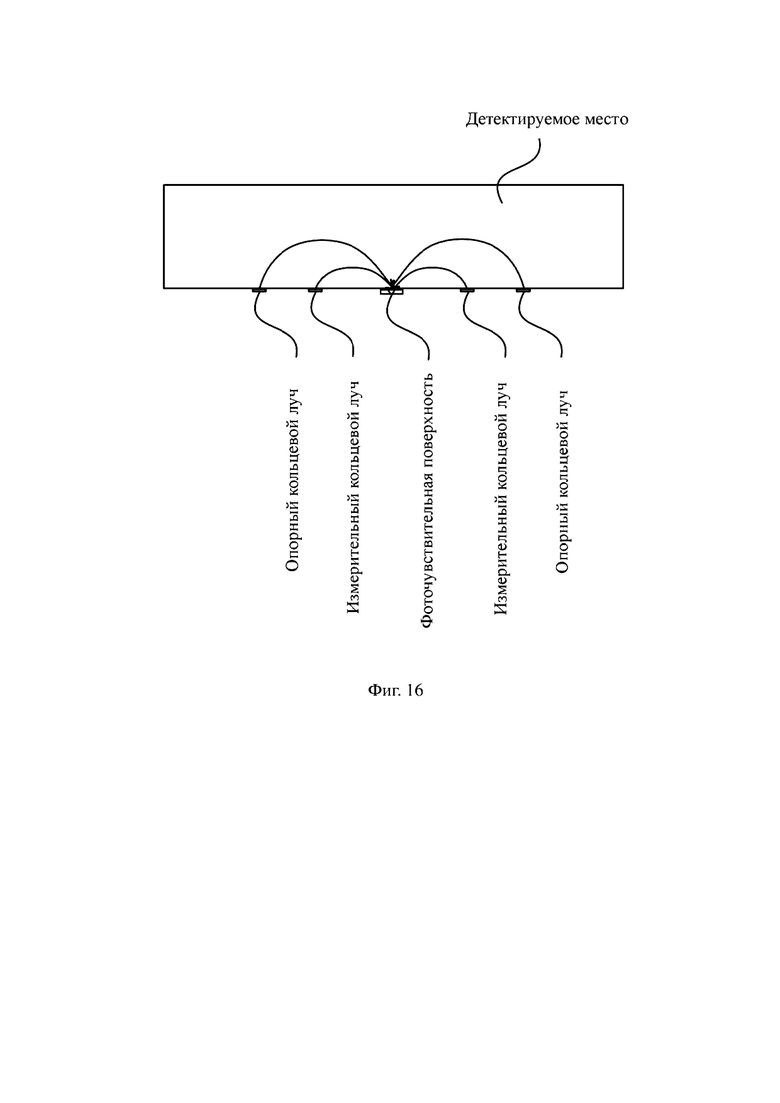
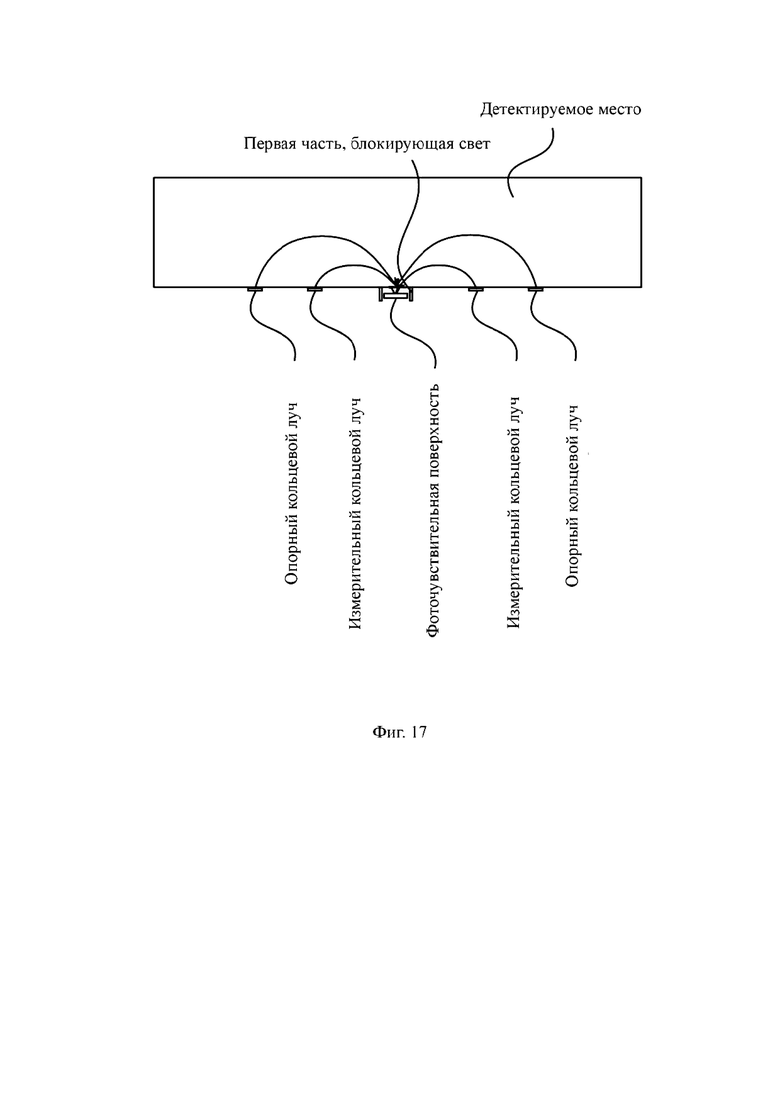
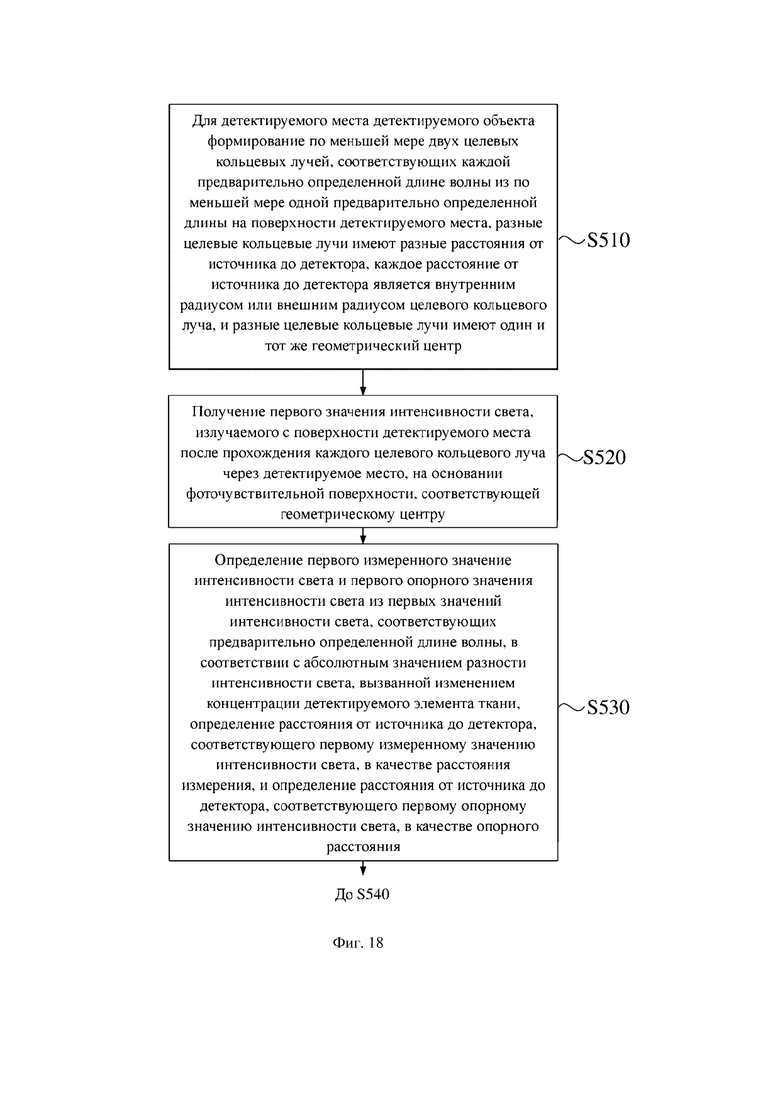
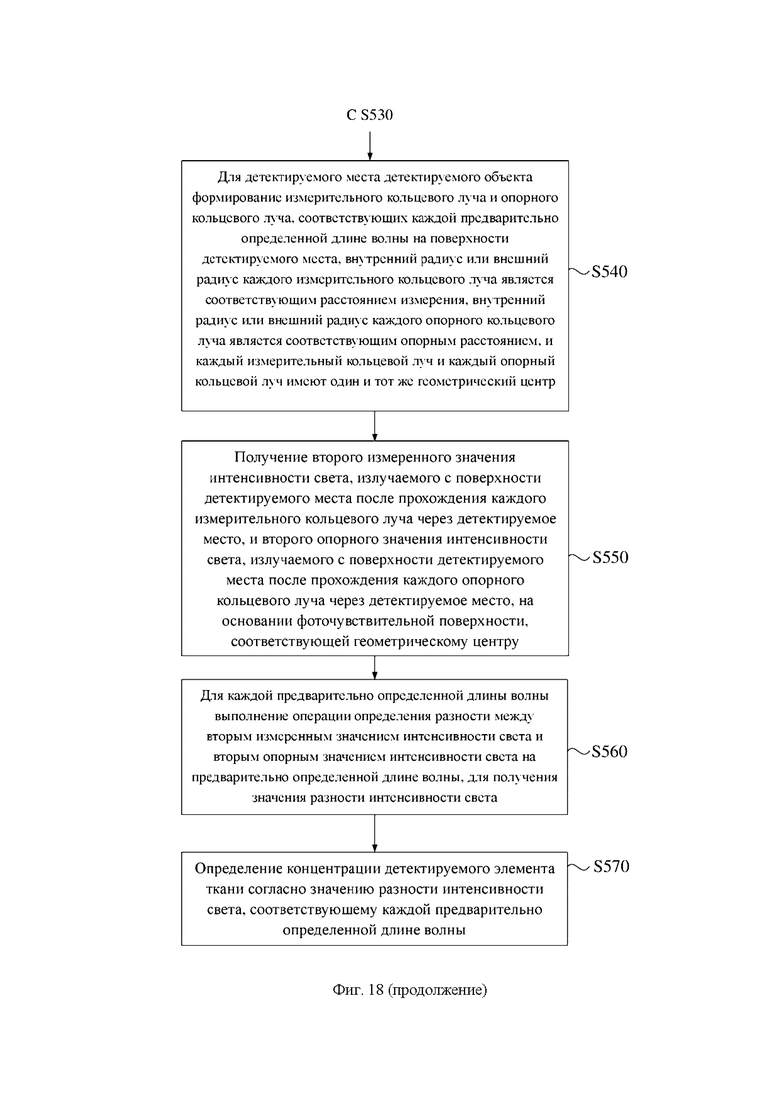
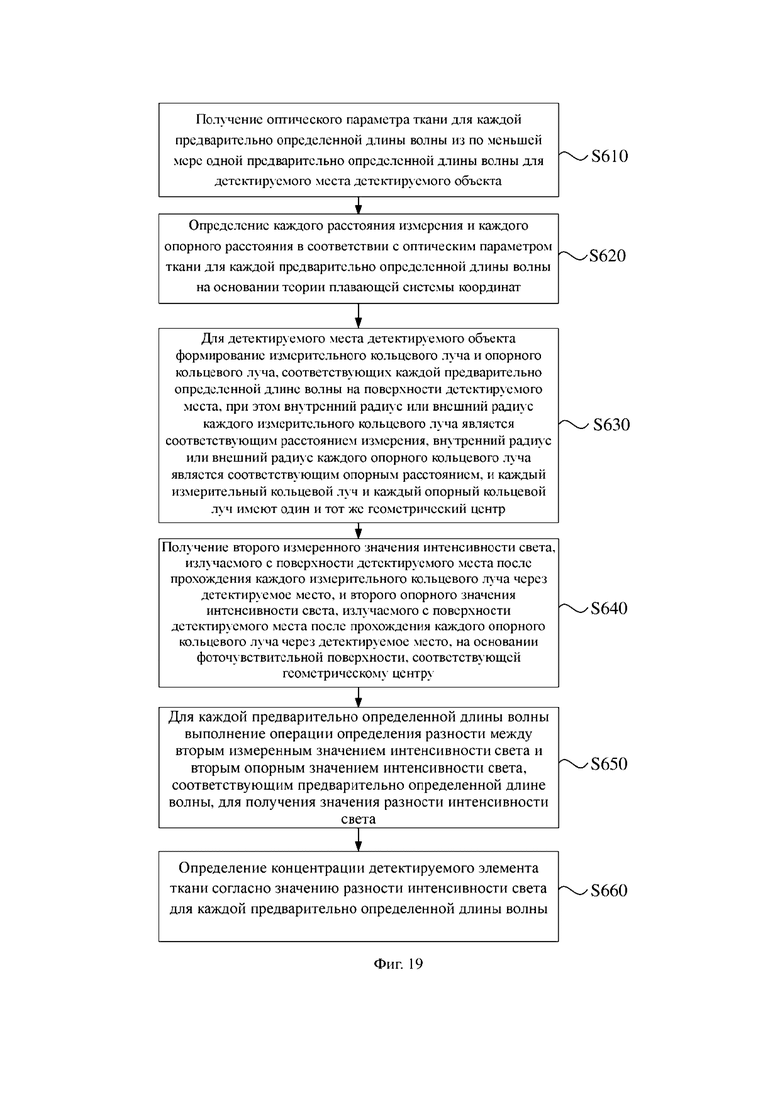
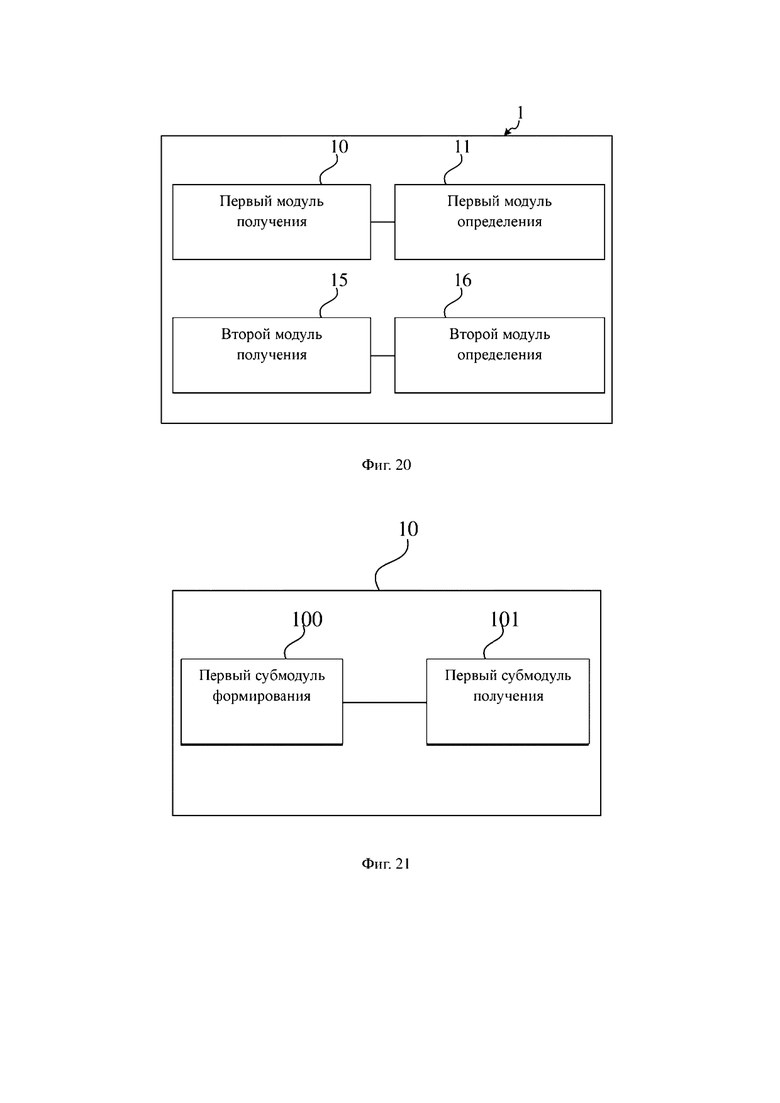
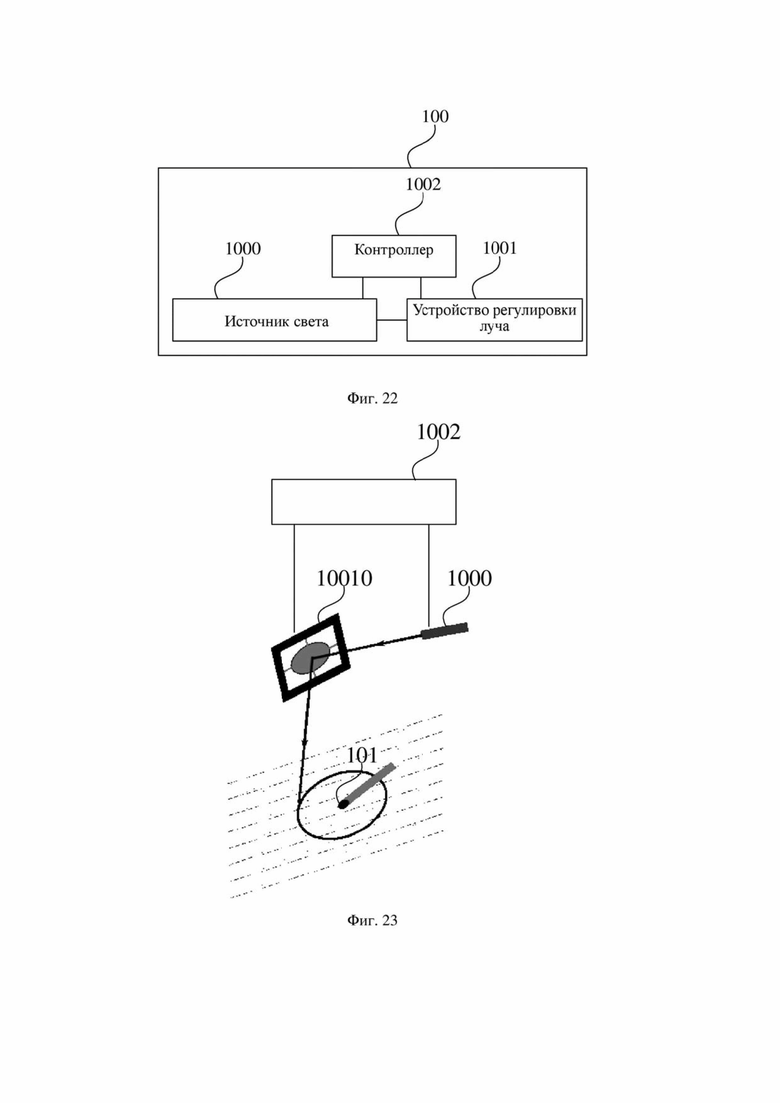
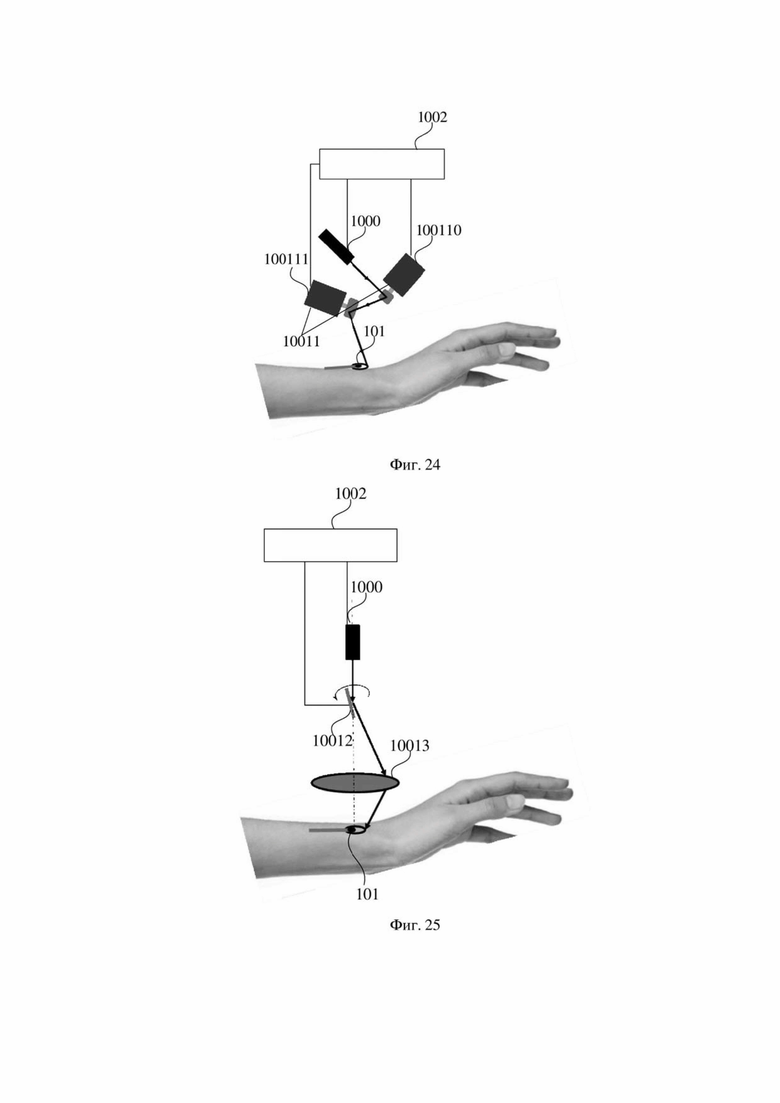
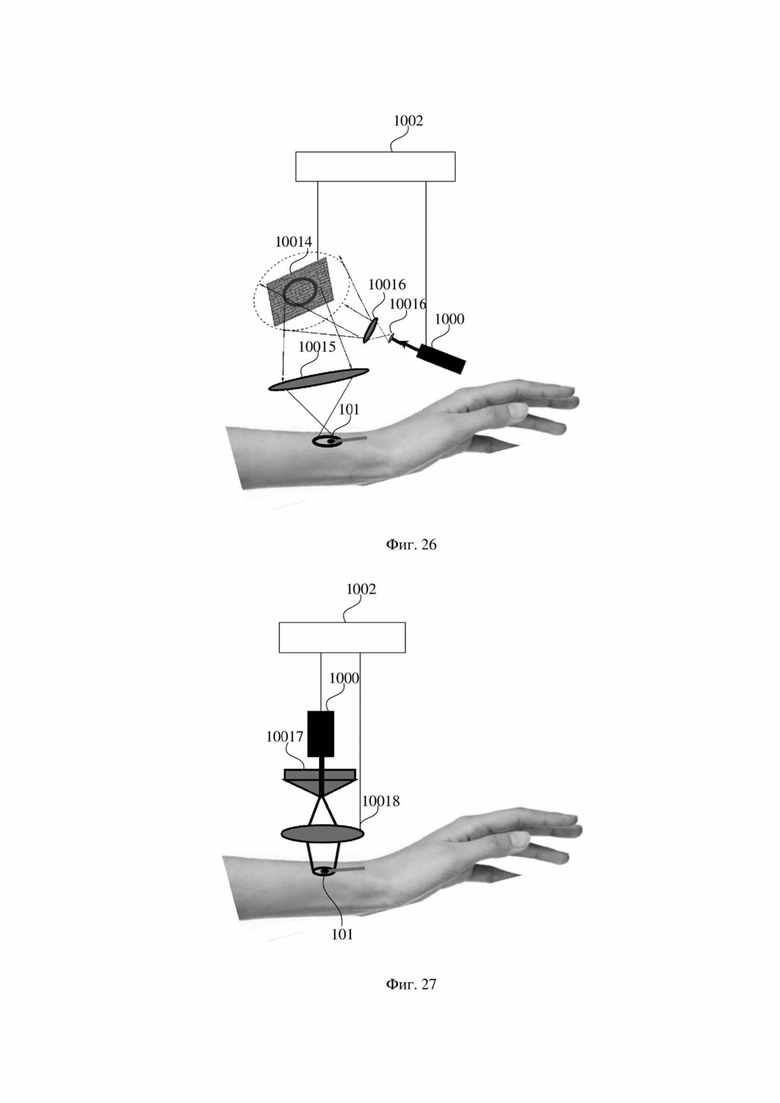
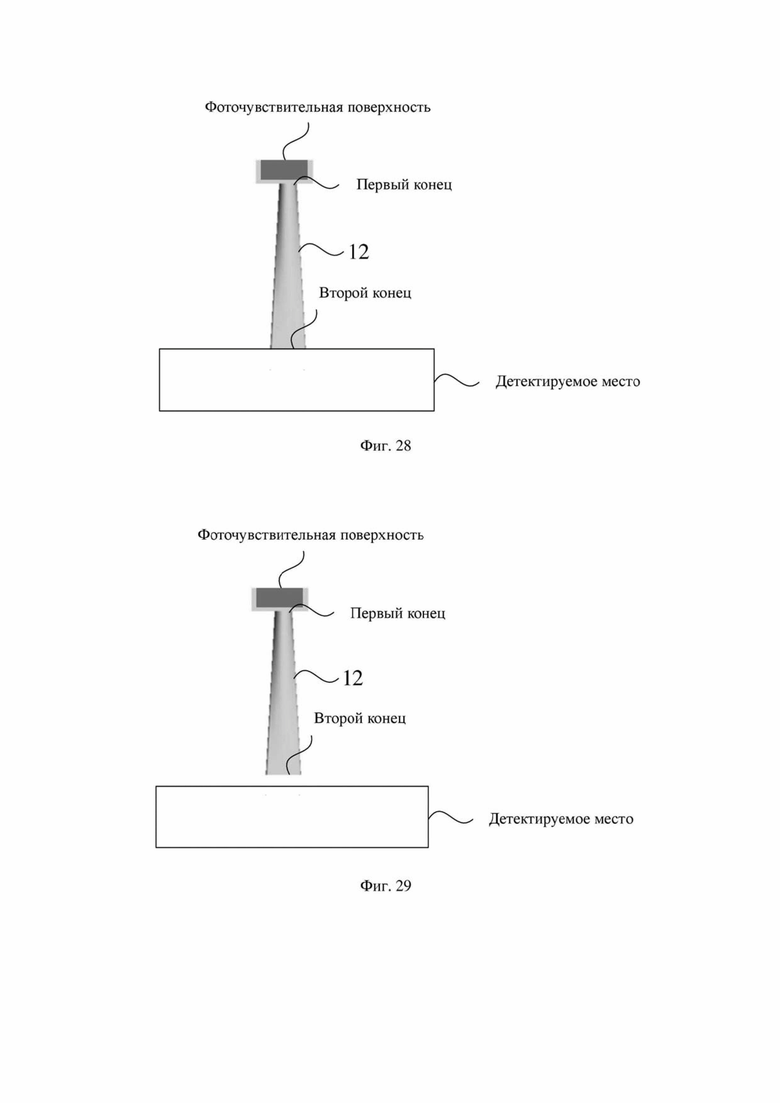
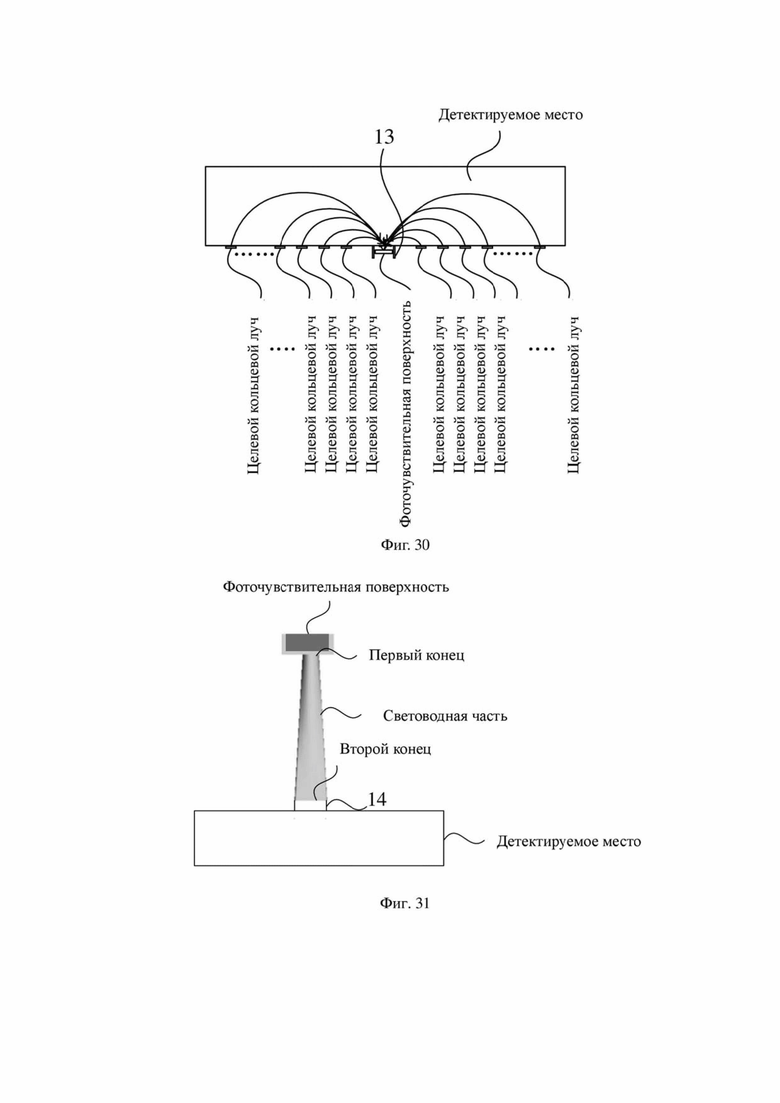
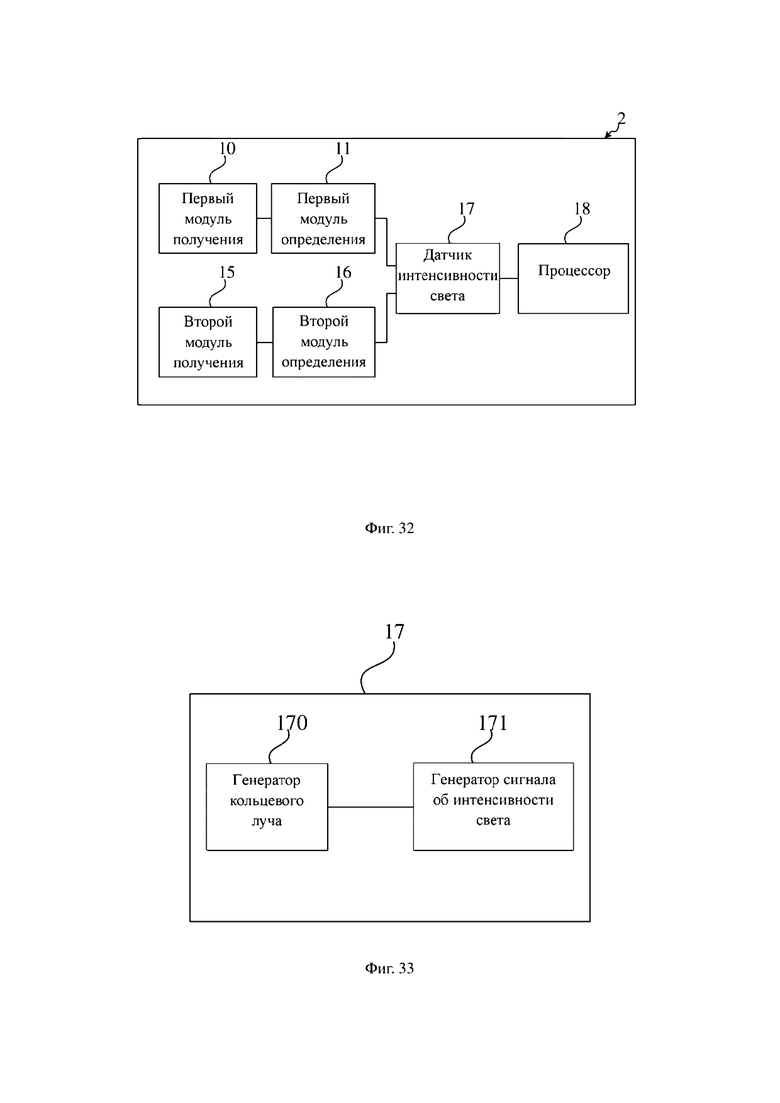
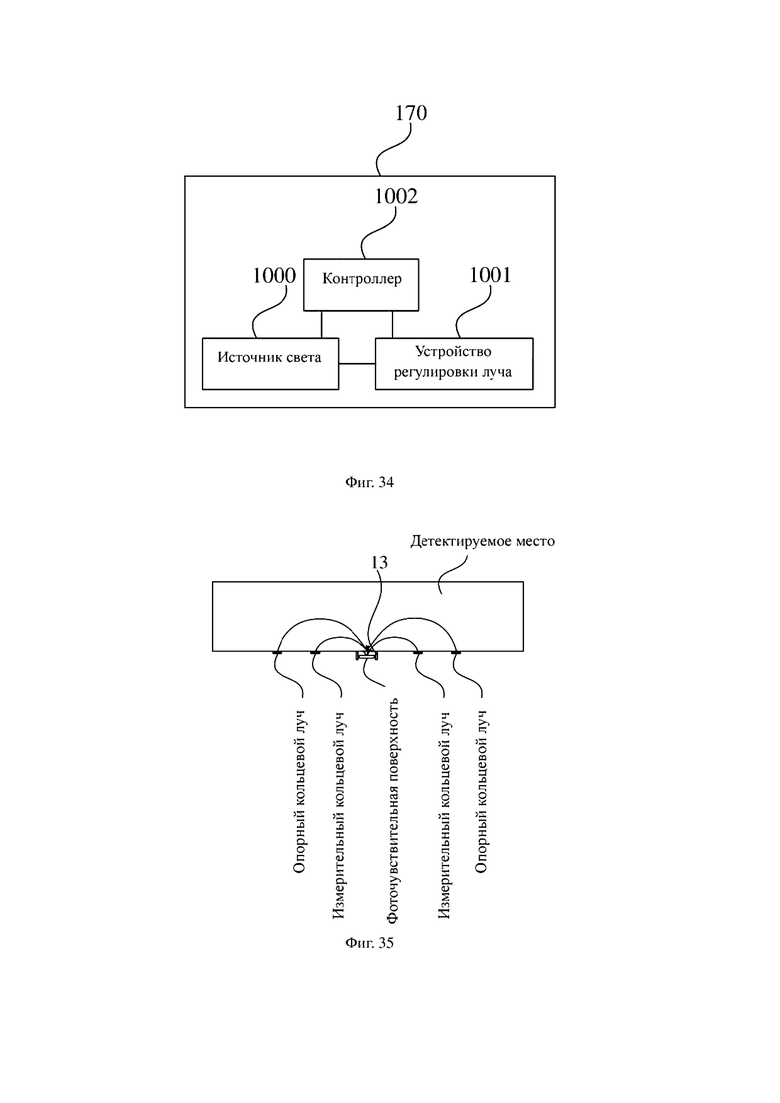
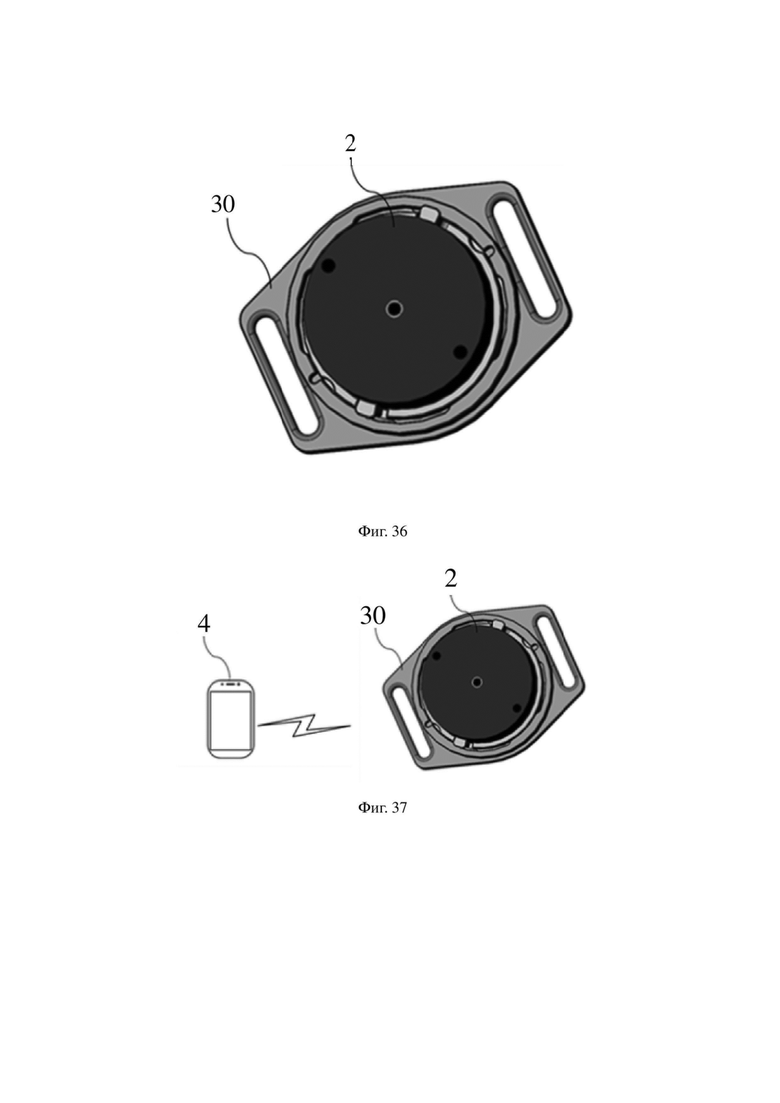
Группа изобретений относится к медицине, а именно к способу и устройству для неинвазивного детектирования для элемента ткани и носимому устройству для неинвазивного детектирования для элемента ткани. При исполнении способа получают для детектируемого места детектируемого объекта второе измеренное значение интенсивности света для каждой предварительно определенной длины волны из предварительно определенных длин волн на расстоянии измерения. Получают второе опорное значение интенсивности света для каждой предварительно определенной длины волны из предварительно определенных длин волн на опорном расстоянии. При этом расстояние измерения представляет собой расстояние от источника до детектора, соответствующее первому измеренному значению интенсивности света. Опорное расстояние представляет собой расстояние от источника до детектора, соответствующее первому опорному значению интенсивности света. Определяют концентрацию детектируемого элемента ткани согласно второму измеренному значению интенсивности света и второму опорному значению интенсивности света для каждой предварительно определенной длины волны. При получении для детектируемого места детектируемого объекта второго измеренного значения интенсивности света и второго опорного значения интенсивности света для каждой предварительно определенной длины волны на расстоянии измерения и на опорном расстоянии соответственно формируют для детектируемого места детектируемого объекта измерительный кольцевой луч и опорный кольцевой луч. Лучи соответствуют каждой предварительно определенной длине волны на поверхности детектируемого места. При этом внутренний радиус каждого измерительного кольцевого луча является соответствующим расстоянием измерения, внутренний радиус каждого опорного кольцевого луча является соответствующим опорным расстоянием, или внешний радиус каждого измерительного кольцевого луча является соответствующим расстоянием измерения, внешний радиус каждого опорного кольцевого луча является соответствующим опорным расстоянием. Каждый измерительный кольцевой луч и каждый опорный кольцевой луч имеют один и тот же геометрический центр. Получают на основании фоточувствительной поверхности, соответствующей геометрическому центру, второе измеренное значение интенсивности света, излучаемого с поверхности детектируемого места после прохождения каждого измерительного кольцевого луча через детектируемое место, и второе опорное значение интенсивности света, излучаемого с поверхности детектируемого места после прохождения каждого опорного кольцевого луча через детектируемое место. Устройство содержит датчик интенсивности света и процессор. Датчик интенсивности света содержит генератор кольцевого луча и генератор сигнала об интенсивности света. Носимое устройство содержит основную часть и устройство неинвазивного детектирования для элемента ткани, предусмотренное на основной части. Носимое устройство выполнено с возможностью ношения на детектируемом месте. Обеспечивается повышение точности детектирования и возможность использования различных способов детектирования за счет регулируемого расстояния от источника до детектора, приема света в неподвижном центре и прохождения падающих лучей на различных расстояниях вокруг этого центра. 3 н. и 22 з.п. ф-лы, 37 ил.
1. Способ неинвазивного детектирования для элемента ткани, включающий:
получение для детектируемого места детектируемого объекта второго измеренного значения интенсивности света для каждой предварительно определенной длины волны из по меньшей мере одной предварительно определенной длины волны на расстоянии измерения и второго опорного значения интенсивности света для каждой предварительно определенной длины волны из по меньшей мере одной предварительно определенной длины волны на опорном расстоянии, при этом расстояние измерения представляет собой расстояние от источника до детектора, соответствующее первому измеренному значению интенсивности света, и опорное расстояние представляет собой расстояние от источника до детектора, соответствующее первому опорному значению интенсивности света; и
определение концентрации детектируемого элемента ткани согласно второму измеренному значению интенсивности света для каждой предварительно определенной длины волны и второму опорному значению интенсивности света для каждой предварительно определенной длины волны,
отличающийся тем, что получение для детектируемого места детектируемого объекта второго измеренного значения интенсивности света для каждой предварительно определенной длины волны на расстоянии измерения и второго опорного значения интенсивности света для каждой предварительно определенной длины волны на опорном расстоянии включает:
формирование для детектируемого места детектируемого объекта измерительного кольцевого луча и опорного кольцевого луча, соответствующих каждой предварительно определенной длине волны на поверхности детектируемого места, при этом внутренний радиус каждого измерительного кольцевого луча является соответствующим расстоянием измерения, внутренний радиус каждого опорного кольцевого луча является соответствующим опорным расстоянием, или внешний радиус каждого измерительного кольцевого луча является соответствующим расстоянием измерения, внешний радиус каждого опорного кольцевого луча является соответствующим опорным расстоянием, и каждый измерительный кольцевой луч и каждый опорный кольцевой луч имеют один и тот же геометрический центр; и
получение на основании фоточувствительной поверхности, соответствующей геометрическому центру, второго измеренного значения интенсивности света, излучаемого с поверхности детектируемого места после прохождения каждого измерительного кольцевого луча через детектируемое место, и второго опорного значения интенсивности света, излучаемого с поверхности детектируемого места после прохождения каждого опорного кольцевого луча через детектируемое место.
2. Способ по п. 1, отличающийся тем, что первое измеренное значение интенсивности света соответствует наибольшему абсолютному значению разности интенсивности света, вызванной изменением концентрации детектируемого элемента ткани, первое опорное значение интенсивности света соответствует наименьшему абсолютному значению первой разности интенсивности света, вызванной изменением концентрации детектируемого элемента ткани, и разность интенсивности света, вызванная изменением концентрации детектируемого элемента ткани, представляет собой разность между первым значением интенсивности света и соответствующим предварительно определенным значением интенсивности света.
3. Способ по п. 1, отличающийся тем, что каждый измерительный кольцевой луч сформирован точечным сканированием светового пятна, и каждый опорный кольцевой луч сформирован точечным сканированием светового пятна; или каждый измерительный кольцевой луч сформирован проекцией луча, и каждый опорный кольцевой луч сформирован проекцией луча.
4. Способ по любому из пп. 1–3, отличающийся тем, что определение концентрации детектируемого элемента ткани согласно второму измеренному значению интенсивности света для каждой предварительно определенной длины волны и второму опорному значению интенсивности света для каждой предварительно определенной длины волны включает:
выполнение для каждой предварительно определенной длины волны операции определения разности между вторым измеренным значением интенсивности света для предварительно определенной длины волны и вторым опорным значением интенсивности света для предварительно определенной длины волны для получения значения разности интенсивности света; и
определение концентрации детектируемого элемента ткани согласно значению разности интенсивности света для каждой предварительно определенной длины волны.
5. Способ по п. 1 или 2, отличающийся тем, что отсутствие контакта между фоточувствительной поверхностью и поверхностью детектируемого места сформировано посредством
обеспечения фоточувствительной поверхности на первом конце световодной части, причем второй конец световодной части находится в контакте или не находится в контакте с поверхностью детектируемого места, при этом второй конец световодной части и первый конец световодной части являются противоположными торцами.
6. Способ по п. 2, отличающийся тем, что фоточувствительная поверхность не находится в контакте с поверхностью детектируемого места, и
способ дополнительно включает экранирование интерференционного света перед определением концентрации детектируемого элемента ткани согласно второму измеренному значению интенсивности света для каждой предварительно определенной длины волны и второму опорному значению интенсивности света для каждой предварительно определенной длины волны.
7. Устройство неинвазивного детектирования для элемента ткани, содержащее:
датчик интенсивности света, выполненный с возможностью получения для детектируемого места детектируемого объекта второго измеренного значения интенсивности света для каждой предварительно определенной длины волны из по меньшей мере одной предварительно определенной длины волны на расстоянии измерения и второго опорного значения интенсивности света для каждой предварительно определенной длины волны из по меньшей мере одной предварительно определенной длины волны на опорном расстоянии, при этом расстояние измерения представляет собой расстояние от источника до детектора, соответствующее первому измеренному значению интенсивности света, и опорное расстояние представляет собой расстояние от источника до детектора, соответствующее первому опорному значению интенсивности света; и
процессор, выполненный с возможностью определения концентрации детектируемого элемента ткани согласно второму измеренному значению интенсивности света для каждой предварительно определенной длины волны и второму опорному значению интенсивности света для каждой предварительно определенной длины волны,
отличающееся тем, что датчик интенсивности света содержит:
генератор кольцевого луча, выполненный с возможностью формирования, для детектируемого места детектируемого объекта, измерительного кольцевого луча и опорного кольцевого луча, соответствующих каждой предварительно определенной длине волны на поверхности детектируемого места, при этом внутренний радиус каждого измерительного кольцевого луча является соответствующим расстоянием измерения, внутренний радиус каждого опорного кольцевого луча является соответствующим опорным расстоянием, или внешний радиус каждого измерительного кольцевого луча является соответствующим расстоянием измерения, внешний радиус каждого опорного кольцевого луча является соответствующим опорным расстоянием, и каждый измерительный кольцевой луч и каждый опорный кольцевой луч имеют один и тот же геометрический центр; и
генератор сигнала об интенсивности света, выполненный с возможностью получения на основании фоточувствительной поверхности, соответствующей геометрическому центру, второго измеренного значения интенсивности света, излучаемого с поверхности детектируемого места после прохождения каждого измерительного кольцевого луча через детектируемое место, и второго опорного значения интенсивности света, излучаемого с поверхности детектируемого места после прохождения каждого опорного кольцевого луча через детектируемое место.
8. Устройство по п. 7, отличающееся тем, что первое измеренное значение интенсивности света соответствует наибольшему абсолютному значению разности интенсивности света, вызванной изменением концентрации детектируемого элемента ткани, первое опорное значение интенсивности света соответствует наименьшему абсолютному значению первой разности интенсивности света, вызванной изменением концентрации детектируемого элемента ткани, и разность интенсивности света, вызванная изменением концентрации детектируемого элемента ткани, представляет собой разность между первым значением интенсивности света и соответствующим предварительно определенным значением интенсивности света.
9. Устройство по п. 7, отличающееся тем, что генератор кольцевого луча содержит источник света, устройство регулировки луча и контроллер, и
контроллер соединен с возможностью связи с источником света и устройством регулировки луча, и
контроллер выполнен с возможностью, для детектируемого места детектируемого объекта, управления источником света и устройством регулировки луча для совместного действия для формирования измерительного кольцевого луча и опорного кольцевого луча, соответствующих каждой предварительно определенной длине волны на поверхности детектируемого места, согласно соответствующей команде рабочего состояния.
10. Устройство по п. 9, отличающееся тем, что устройство регулировки луча содержит сканирующее зеркало MEMS, и
при этом контроллер выполнен с возможностью, для детектируемого места детектируемого объекта, управления источником света согласно соответствующей команде рабочего состояния для излучения падающего луча, соответствующего каждой предварительно определенной длине волны, и проецирования каждого падающего луча на сканирующее зеркало MEMS, и управления сканирующим зеркалом MEMS согласно соответствующей команде рабочего состояния для преобразования каждого падающего луча в соответствующий измерительный кольцевой луч и соответствующий опорный кольцевой луч и проецирования каждого измерительного кольцевого луча и каждого опорного кольцевого луча на поверхность детектируемого места.
11. Устройство по п. 9, отличающееся тем, что устройство регулировки луча содержит узел гальванического сканирования, и
при этом контроллер выполнен с возможностью, для детектируемого места детектируемого объекта, управления источником света согласно соответствующей команде рабочего состояния для излучения падающего луча, соответствующего каждой предварительно определенной длине волны, и проецирования каждого падающего луча на узел гальванического сканирования, и управления узлом гальванического сканирования согласно соответствующей команде рабочего состояния для преобразования каждого падающего луча в соответствующий измерительный кольцевой луч и соответствующий опорный кольцевой луч и проецирования каждого измерительного кольцевого луча и каждого опорного кольцевого луча на поверхность детектируемого места.
12. Устройство по п. 11, отличающееся тем, что узел гальванического сканирования содержит первый двухосевой гальванический сканер и второй двухосевой гальванический сканер, и
при этом контроллер выполнен с возможностью, для детектируемого места детектируемого объекта, управления источником света согласно соответствующей команде рабочего состояния для излучения падающего луча, соответствующего каждой предварительно определенной длине волны, и проецирования каждого падающего луча на первый двухосевой гальванический сканер;
контроллер выполнен с возможностью управления первым двухосевым гальваническим сканером согласно соответствующей команде рабочего состояния для отражения первого предварительно определенного угла вдоль оси X так, что каждый падающий луч отражается под первым предварительно определенным углом в направлении оси X, и проецирования каждого отраженного падающего луча на второй двухосевой гальванический сканер; и
контроллер выполнен с возможностью управления вторым двухосевым гальваническим сканером согласно команде рабочего состояния для отражения второго предварительно определенного угла в направлении оси Y так, что каждый отраженный падающий луч отражается под вторым предварительно определенным углом в направлении оси Y для формирования каждого измерительного кольцевого луча и каждого опорного кольцевого луча, и проецирования каждого измерительного кольцевого луча и каждого опорного кольцевого луча на поверхность детектируемого места.
13. Устройство по п. 9, отличающееся тем, что устройство регулировки луча содержит вращающееся зеркало и первую линзу фокусировки напряжения, и
при этом контроллер выполнен с возможностью, для детектируемого места детектируемого объекта, управления источником света согласно соответствующей команде рабочего состояния для излучения падающего луча, соответствующего каждой предварительно определенной длине волны, и проецирования каждого падающего луча на вращающееся зеркало;
контроллер выполнен с возможностью управления вращающимся зеркалом согласно соответствующей команде рабочего состояния для вращения под разными углами для преобразования каждого падающего луча в соответствующий исходный кольцевой луч и проецирования каждого исходного кольцевого луча на первую линзу фокусировки напряжения; и
контроллер выполнен с возможностью управления первой линзой фокусировки напряжения согласно соответствующей команде рабочего состояния для регулировки внутреннего радиуса каждого исходного кольцевого луча в соответствии с соответствующим расстоянием измерения для получения каждого измерительного кольцевого луча и регулировки внутреннего радиуса каждого исходного кольцевого луча в соответствии с соответствующим опорным расстоянием для получения каждого опорного кольцевого луча, и проецирования каждого измерительного кольцевого луча и каждого опорного кольцевого луча на детектируемое место; или для регулировки внешнего радиуса каждого исходного кольцевого луча в соответствии с соответствующим расстоянием измерения для получения каждого измерительного кольцевого луча и регулировки внутреннего радиуса каждого исходного кольцевого луча в соответствии с соответствующим опорным расстоянием для получения каждого опорного кольцевого луча, и проецирования каждого измерительного кольцевого луча и каждого опорного кольцевого луча на детектируемое место.
14. Устройство по п. 13, отличающееся тем, что каждая команда рабочего состояния генерируется контроллером согласно первой таблице связи, в которой хранятся соответствующая связь между каждым измерительным кольцевым лучом, соответствующим каждой предварительно определенной длине волны, и рабочим напряжением первой линзы фокусировки напряжения и соответствующая связь между каждым опорным кольцевым лучом, соответствующим каждой предварительно определенной длине волны, и рабочим напряжением первой линзы фокусировки напряжения для детектируемого места детектируемого объекта.
15. Устройство по п. 9, отличающееся тем, что устройство регулировки луча содержит микролинзовую решетку и линзу, формирующую изображение, и
при этом контроллер выполнен с возможностью, для детектируемого места детектируемого объекта, управления источником света согласно соответствующей команде рабочего состояния для излучения падающего луча, соответствующего каждой предварительно определенной длине волны, и проецирования каждого падающего луча на микролинзовую решетку, и управления микролинзовой решеткой согласно соответствующей команде рабочего состояния для преобразования каждого падающего луча в соответствующий измерительный кольцевой луч и соответствующий опорный кольцевой луч и проецирования каждого измерительного кольцевого луча и каждого опорного кольцевого луча на поверхность детектируемого места через линзу, формирующую изображение.
16. Устройство по п. 15, отличающееся тем, что устройство регулировки луча дополнительно содержит группу линз для расширения луча, и
при этом контроллер выполнен с возможностью, для детектируемого места детектируемого объекта, управления источником света согласно соответствующей команде рабочего состояния для излучения падающего луча, соответствующего каждой предварительно определенной длине волны, и проецирования каждого падающего луча на группу линз для расширения луча;
группа линз для расширения луча выполнена с возможностью расширения каждого падающего луча и проецирования каждого расширенного падающего луча на микролинзовую решетку так, что проекция каждого падающего луча на микролинзовую решетку покрывает микролинзовую решетку; и
контроллер выполнен с возможностью управления микролинзовой решеткой согласно соответствующей команде рабочего состояния для преобразования каждого падающего луча в соответствующий измерительный кольцевой луч и соответствующий опорный кольцевой луч и проецирования каждого измерительного кольцевого луча и каждого опорного кольцевого луча на поверхность детектируемого места через линзу, формирующую изображение.
17. Устройство по п. 16, отличающееся тем, что каждая команда рабочего состояния генерируется контроллером согласно второй таблице связи, в которой хранятся соответствующая связь между каждым измерительным кольцевым лучом, соответствующим каждой предварительно определенной длине волны, и микролинзой в открытом состоянии в микролинзовой решетке и соответствующая связь между каждым опорным кольцевым лучом, соответствующим каждой предварительно определенной длине волны, и микролинзой в открытом состоянии в микролинзовой решетке для детектируемого места детектируемого объекта.
18. Устройство по п. 9, отличающееся тем, что устройство регулировки луча содержит коническую линзу и вторую линзу фокусировки напряжения, и
при этом контроллер выполнен с возможностью, для детектируемого места детектируемого объекта, управления источником света согласно соответствующей команде рабочего состояния для излучения падающего луча, соответствующего каждой предварительно определенной длине волны, и проецирования каждого падающего луча на коническую линзу;
коническая линза выполнена с возможностью преобразования каждого падающего луча в конический луч и проецирования каждого конического луча на вторую линзу фокусировки напряжения для отображения в виде каждого исходного кольцевого луча второй линзой фокусировки напряжения; и
контроллер выполнен с возможностью управления второй линзой фокусировки напряжения согласно соответствующей команде рабочего состояния для регулировки внутреннего радиуса каждого исходного кольцевого луча в соответствии с соответствующим расстоянием измерения для получения каждого измерительного кольцевого луча и регулировки внутреннего радиуса каждого исходного кольцевого луча в соответствии с соответствующим опорным расстоянием для получения каждого опорного кольцевого луча, и проецирования каждого измерительного кольцевого луча и каждого опорного кольцевого луча на детектируемое место; или для регулировки внешнего радиуса каждого исходного кольцевого луча в соответствии с соответствующим расстоянием измерения для получения каждого измерительного кольцевого луча и регулировки внешнего радиуса каждого исходного кольцевого луча в соответствии с соответствующим опорным расстоянием для получения каждого опорного кольцевого луча, и проецирования каждого измерительного кольцевого луча и каждого опорного кольцевого луча на детектируемое место.
19. Устройство по п. 18, отличающееся тем, что каждая команда рабочего состояния генерируется контроллером согласно третьей таблице связи, в которой хранятся соответствующая связь между каждым измерительным кольцевым лучом, соответствующим каждой предварительно определенной длине волны, и рабочим напряжением второй линзы фокусировки напряжения и соответствующая связь между каждым опорным кольцевым лучом, соответствующим каждой предварительно определенной длине волны, и рабочим напряжением второй линзы фокусировки напряжения для детектируемого места детектируемого объекта.
20. Устройство по любому из пп. 7–19, отличающееся тем, что процессор выполнен с возможностью:
выполнения для каждой предварительно определенной длины волны операции определения разности в отношении второго измеренного значения интенсивности света и второго опорного значения интенсивности света для предварительно определенной длины волны, чтобы получить значение разности интенсивности света; и
определения концентрации детектируемого элемента ткани согласно значению разности интенсивности света для каждой предварительно определенной длины волны.
21. Устройство по любому из пп. 7–19, отличающееся тем, что фоточувствительная поверхность находится в контакте или не находится в контакте с поверхностью детектируемого места.
22. Устройство по п. 21, отличающееся тем, что дополнительно содержит световодную часть,
при этом фоточувствительная поверхность расположена на первом конце световодной части, второй конец световодной части находится в контакте или не находится в контакте с поверхностью детектируемого места, и второй конец световодной части и первый конец световодной части являются противоположными торцами.
23. Устройство по п. 21, отличающееся тем, что фоточувствительная поверхность не находится в контакте с поверхностью детектируемого места, и устройство дополнительно содержит первую часть, блокирующую свет,
первая часть, блокирующая свет, расположена в области зазора между фоточувствительной поверхностью и поверхностью детектируемого места, и первая часть, блокирующая свет, находится в контакте с поверхностью детектируемого места, и фоточувствительная поверхность расположена на внутренней стороне первой части, блокирующей свет; и первая часть, блокирующая свет, является неотъемлемой частью фоточувствительной поверхности, или первая часть, блокирующая свет, отделена от фоточувствительной поверхности.
24. Устройство по п. 22, отличающееся тем, что второй конец световодной части не находится в контакте с поверхностью детектируемого места, и устройство дополнительно содержит вторую часть, блокирующую свет, и
вторая часть, блокирующая свет, расположена в области зазора между световодной частью и поверхностью детектируемого места, первый конец второй части, блокирующей свет, находится в контакте со вторым концом световодной части, второй конец второй части, блокирующей свет, находится в контакте с поверхностью детектируемого места, и второй конец второй части, блокирующей свет, и первый конец второй части, блокирующей свет, являются противоположными торцами.
25. Носимое устройство, содержащее основную часть и устройство неинвазивного детектирования для элемента ткани по любому из пп. 7–24,
при этом устройство неинвазивного детектирования для элемента ткани предусмотрено на основной части, и носимое устройство носится на детектируемом месте.
| RU 2007126679 A, 20.01.2009 | |||
| JP2015225081 A, 14.12.2015 | |||
| US 2016139045 A1, 19.05.2016 | |||
| US 2016091496 A1, 31.03.2016 | |||
| WO 2009146651 A1, 10.12.2009 | |||
| Комплексная добавка для бетонной смеси | 1989 |
|
SU1699973A1 |
| US 2011131021 A1, 02.06.2011. | |||

