Изобретение относится к области космической техники и может быть использовано для ориентирования космического аппарата (КА) относительно орбитальной (ОСК), программной (ПСК) и инерциальной (ИСК) систем координат с использованием датчика звезд (ДЗ).
Известны многочисленные работы, например [1-15], где рассматриваются вопросы астроориентации космических аппаратов в околоземном пространстве.
В частности, в книге [4] авторов В.Н. Бранец, И.П. Шмыглевский «Применение кватернионов в задачах ориентации твердого тела». Москва, Наука 1973 г. (см. стр. 205-226), приведены некоторые блок-схемы устройств орбитальной астроориентации, при этом авторы рассматривают только общетеоретические аспекты ориентации КА.
Известно, например, устройство [14], рассмотренное в статье «Система ориентации и стабилизации космического аппарата по информации с астродатчиков»// Электронный журнал «Труды МАИ». Выпуск №38, в котором изложены результаты летных испытаний, но не недостаточно раскрыты существенные признаки системы ориентации.
В популярной книге Разработка систем космических аппаратов//Под редакцией П. Фортескью, Г. Суайнерда, Дж. Старка; Пер. с англ.-М.: Альпина паблишер, 2015 рассматриваются вопросы переориентации КА так же без конкретики схемных решений.
Аналогичные недостатки содержатся в источниках [1-2, 5-13, 15] и многих других.
Наиболее близким устройством, которое может быть принято за прототип, является устройство, изложенное в статье [3] авторов К.А. Боярчук и др. Система ориентации и стабилизации КА «Кондор-Э». Труды секции 22 имени академика В.Н. Челомея XXXVIII академических чтений по космонавтике. В указанной системе ориентации (СО) используется принцип астрокоррекции с обратными связями, однако СО построено таким образом, что ограничено только курсовым программным поворотом без возможности программных поворотов КА по другим осям - крену и тангажу. При этом само программное движение не стабилизируется в течение всего времени программного поворота, что приводит к низкому качеству переходного процесса и, как следствие, - снижению точности ориентации КА.
Техническим результатом изобретения является повышение качества управления КА в орбитальном полете - реализация трехмерной программной ориентации (включая тангаж и крен) и оптимизация переходных процессов параметров углового движения КА.
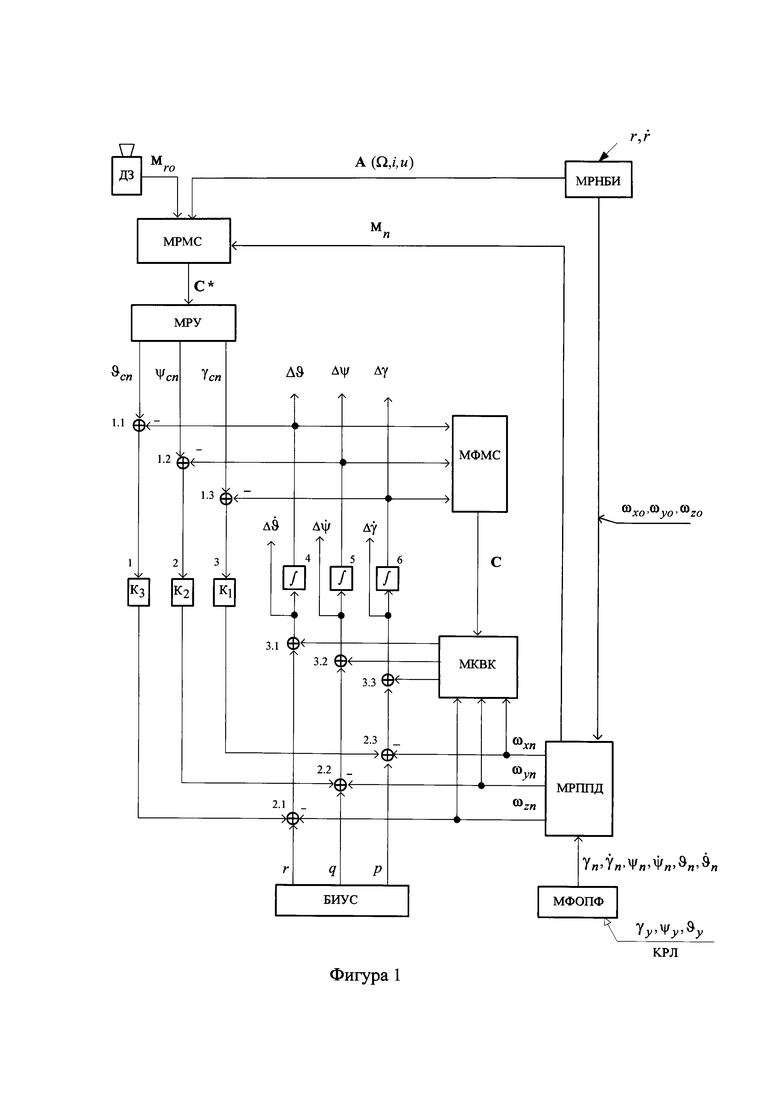
Для этого, в отличие от известного технического решения, которое содержит датчик звезд (ДЗ), модуль расчета навигационно-баллистической информации (МРНБИ), модуль расчета матрицы стабилизации (МРМС) и модуль расчета углов стабилизации (МРУ), причем выходы ДЗ и МРНБИ подключены к первому и второму входам МРМС, выход которого подключен к входу МРУ, а так же блок гироскопических измерителей угловой скорости (БИУС), в нее введены новые связи и новые программные модули - модуль расчета параметров программного движения КА (МРППД), модуль формирования матрицы стабилизации (МФМС), модуль компенсации взаимовлияния каналов (МКВК) и модуль формирования оптимизирующих программных функций (МФОПФ), а так же три интегратора, три усилительно-согласующих блока (УСБ) и девять сумматоров, при этом каждый из выходов МРУ образует отдельные цепи из последовательно соединенных первых сумматоров, УСБ, вторых сумматоров, третьих сумматоров и интеграторов, выходы которых подключены к вторым входам первых сумматоров и соответствующим входам МФМС, вторые входы второй группы сумматоров подключены к соответствующим выходам БИУС, а их третьи входы подключены к соответствующим выходам МРППД, которые одновременно соединены с соответствующими входами МКВК, первый, второй и третий выходы МКВК подключены к соответствующим вторым входам третей группы сумматоров, кроме того четвертый выход МРППД соединен с третьим входом МРМС, а его первый и второй входы соединены с вторым выходом МРНБИ и выходом МФОПФ, причем выходы и входы интеграторов в каждом из каналов являются углами стабилизации КА по углам и угловым скоростям соответственно.
На фиг. 1 представлен пример реализации изобретения, где обозначено:
 - матрица ориентации КА относительно ИСК, формируемая ДЗ;
- матрица ориентации КА относительно ИСК, формируемая ДЗ;
 - матрица ориентации ОСК относительно ИСК, формируется МРНБИ;
- матрица ориентации ОСК относительно ИСК, формируется МРНБИ;
 - матрица программных поворотов КА на углы
- матрица программных поворотов КА на углы 
С* - матрица стабилизации по данным ДЗ, МРНБИ и МРППД;
 - рассчитанные углы рассогласования между ПСК и ССК;
- рассчитанные углы рассогласования между ПСК и ССК;
 - углы и угловые скорости стабилизации КА, подаваемые на исполнительные органы, соответственно по тангажу, курсу и крену;
- углы и угловые скорости стабилизации КА, подаваемые на исполнительные органы, соответственно по тангажу, курсу и крену;
С - матрица, формируемая в цепях обратных связей по углам стабилизации КА - Δϑ, Δψ, Δγ;
1, 2, 3 - усилительно-согласующие блоки в канале тангажа-1 (К3), в канале курса - 2 (К2), в канале крена - 3(К1);
γy, ψy, ϑy - уставки программных поворотов, передаваемые на борт КА по КРЛ, относительно ОСК, соответственно по крену, курсу и тангажу;
 - оптимизирующие программные функции по углам и угловым скоростям углового движения КА, соответственно по крену, курсу и тангажу;
- оптимизирующие программные функции по углам и угловым скоростям углового движения КА, соответственно по крену, курсу и тангажу;
 - угловые скорости ПСК относительно ИСК;
- угловые скорости ПСК относительно ИСК;
 - угловые скорости ОСК относительно ИСК;
- угловые скорости ОСК относительно ИСК;
p, q, r - показания БИУС относительно осей ССК (X, Y, Z) соответственно.
Везде  - крен,
- крен,  - курс,
- курс,  - тангаж.
- тангаж.
4, 5, 6 - первый, второй и третий интеграторы в каналах тангаж, курса и крена соответственно;
1.1-1.3 - первая группа сумматоров;
2.1-2.3 - вторая группа сумматоров;
3.1-3.3 - третья группа сумматоров.
Система астроориентации работает следующим образом.
В модуле МРМС рассчитывается текущее значение матрицы стабилизации (рассогласования ССК и ПСК) - С*. Она рассчитывается:
- по показаниям ДЗ - 
- по данным баллистического расчета о положении ОСК относительно ИСК - A (Ω, i, u);
- по текущим значениям матрицы требуемого программного поворота КА относительно ОСК - 
МРУ, получив матрицу С*, рассчитывает углы рассогласования между ПСК и ССК:

Вычисленные углы ϑcn, ψcn, γcn каждый по своему каналу сравниваются с углами стабилизации КА - Δϑ, Δψ, Δγ, которые получаются на выходе интеграторов 4, 5, 6:

Эти сигналы усиливаются в соответствующих УСБ - 1, 2, 3 и складываются с сигналами БИУС (p, q, r) на соответствующих сумматорах второй группы - 2.1, 2.2, 2.3.
Далее сигналы поступают на соответствующие первые входы сумматоров третьей группы 3.1, 3.2, 3.3, где из них вычитают поправки, поступающие из МКВК, на «мешающие» перекрестные связи программных скоростей:
и после интегрирования на соответствующих интеграторах - 4, 5, 6 поступают на соответствующие вторые входы первой группы сумматоров (1.1, 1.2., 1.3) с обратными знаками, замыкая тем самым обратные связи по углам стабилизации.
Для формирования поправок модуль МКВК принимает данные о программных угловых скоростях  от МРППД и матрицу С, составленную из фактических углов стабилизации КА - Δϑ, Δψ, Δγ, поступающих с выходов интеграторов 4, 5, 6:
от МРППД и матрицу С, составленную из фактических углов стабилизации КА - Δϑ, Δψ, Δγ, поступающих с выходов интеграторов 4, 5, 6:
результатом является формирование сигналов МКВК:

Модуль МРППД вырабатывает программные скорости КА относительно ИСК -  получая данные от модуля МФОПФ в виде программных углов и программных угловых скоростей -
получая данные от модуля МФОПФ в виде программных углов и программных угловых скоростей -  и от модуля МРНБИ в виде угловых скоростей ОСК относительно ИСК -
и от модуля МРНБИ в виде угловых скоростей ОСК относительно ИСК - 
где  - матрицы задаваемых плоских программных поворотов КА по курсу, тангажу и крену соответственно на углы
- матрицы задаваемых плоских программных поворотов КА по курсу, тангажу и крену соответственно на углы 

где  - скорость прецессии лини узлов ОСК;
- скорость прецессии лини узлов ОСК;
 - угол наклона и скорость изменения угла наклона плоскости ОСК к плоскости экватора Земли;
- угол наклона и скорость изменения угла наклона плоскости ОСК к плоскости экватора Земли;
 - аргумент широты и скорость изменения аргумента широты (орбитальная угловая скорость - ωO).
- аргумент широты и скорость изменения аргумента широты (орбитальная угловая скорость - ωO).
Модуль МФОПФ преобразует уставки  поступающие из центра управления полетом (ЦУП) по командной радиолинии (КРЛ), в программные углы и программные угловые скорости поворота КА -
поступающие из центра управления полетом (ЦУП) по командной радиолинии (КРЛ), в программные углы и программные угловые скорости поворота КА - 
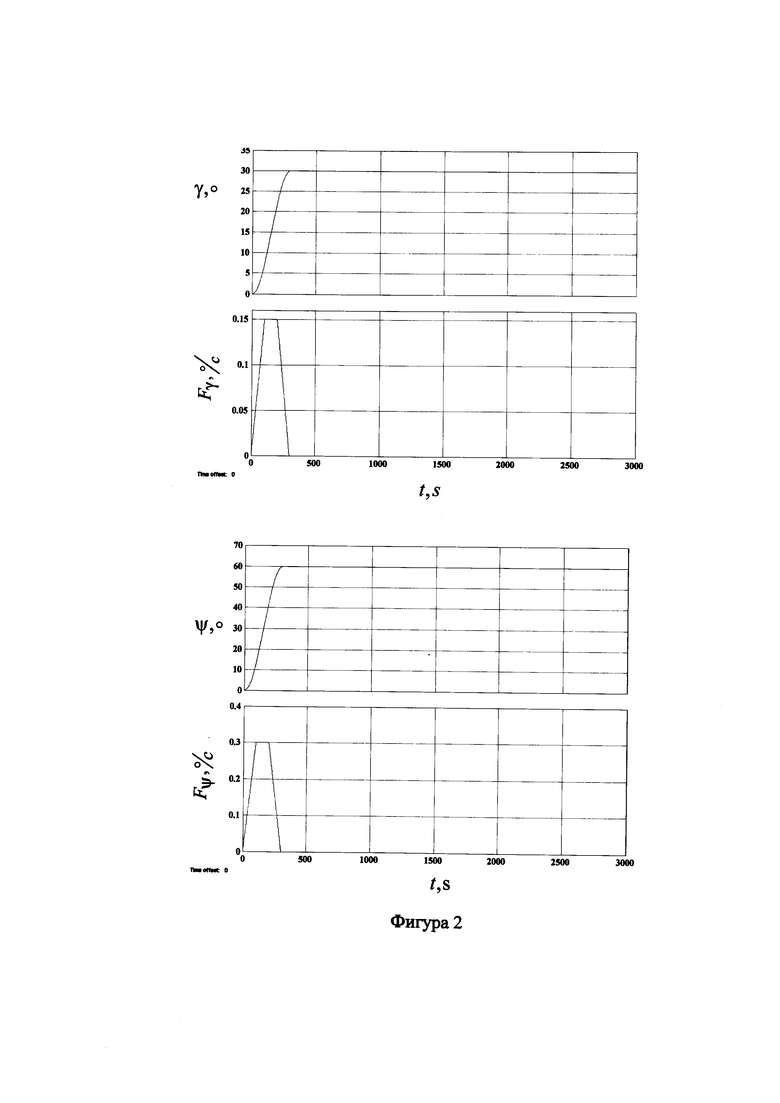
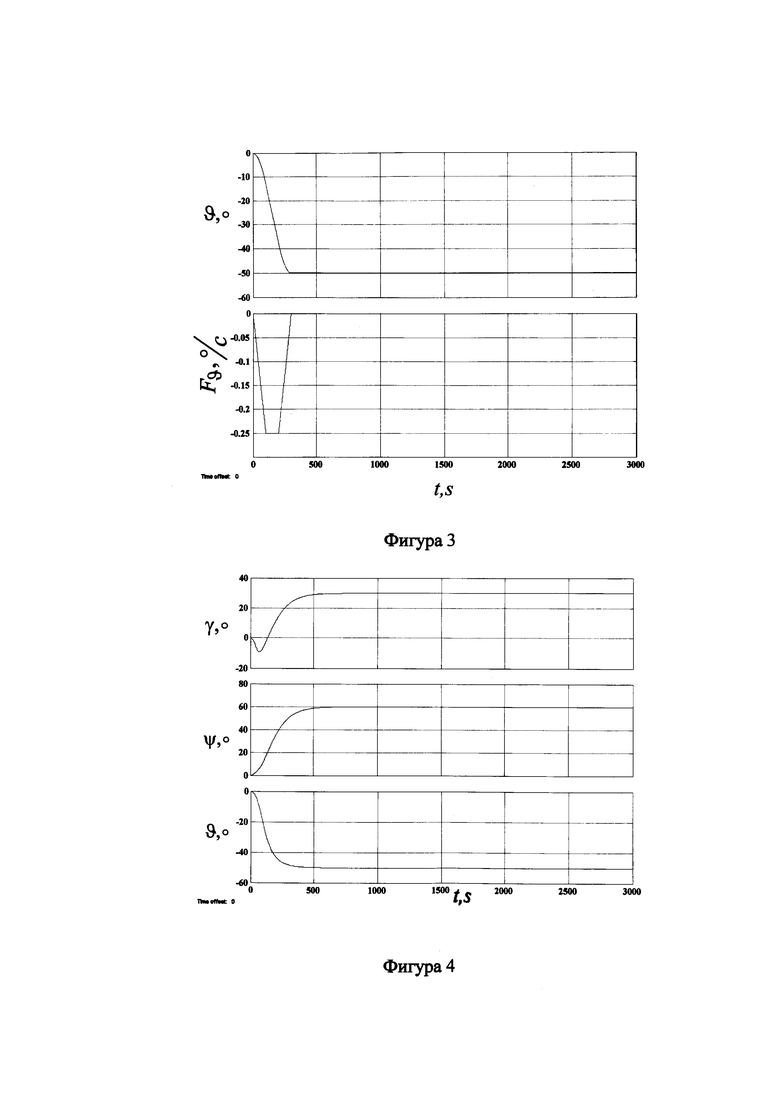
Это необходимо в связи с тем, что в процессе программных поворотов КА заданные уставки и углы программных поворотов КА не равны  а совпадут они только в конце программных поворотов после затухания переходных процессов. При этом МФОПФ обеспечивает стабилизацию угловых скоростей КА относительно программных траекторий его углового движения (фиг. 2, 3), что позволяет выполнить программный поворот КА с требуемым качеством переходного процесса.
а совпадут они только в конце программных поворотов после затухания переходных процессов. При этом МФОПФ обеспечивает стабилизацию угловых скоростей КА относительно программных траекторий его углового движения (фиг. 2, 3), что позволяет выполнить программный поворот КА с требуемым качеством переходного процесса.
На фиг. 4 показан процесс программных поворотов КА без стабилизации угловых скоростей относительно программных траекторий  - процесс программного поворота получается не качественным, с очень большим перерегулированием ~ 10°.
- процесс программного поворота получается не качественным, с очень большим перерегулированием ~ 10°.
В соответствии со структурно-функциональной схемой (фиг. 1) уравнения движения системы астроориентации имеют вид:
 - матрицы задаваемых плоских программных поворотов КА по курсу, тангажу и крену соответственно на углы
- матрицы задаваемых плоских программных поворотов КА по курсу, тангажу и крену соответственно на углы 
Функционал МФОПФ:
Реализация функционала показана на фиг. 2, 3.
Функционал  формирует управление в виде трапеции общего вида, в результате переходные процессы программных поворотов КА по каждому из углов ориентации выполняются за минимальной время и имеют практически идеальный вид.
формирует управление в виде трапеции общего вида, в результате переходные процессы программных поворотов КА по каждому из углов ориентации выполняются за минимальной время и имеют практически идеальный вид.
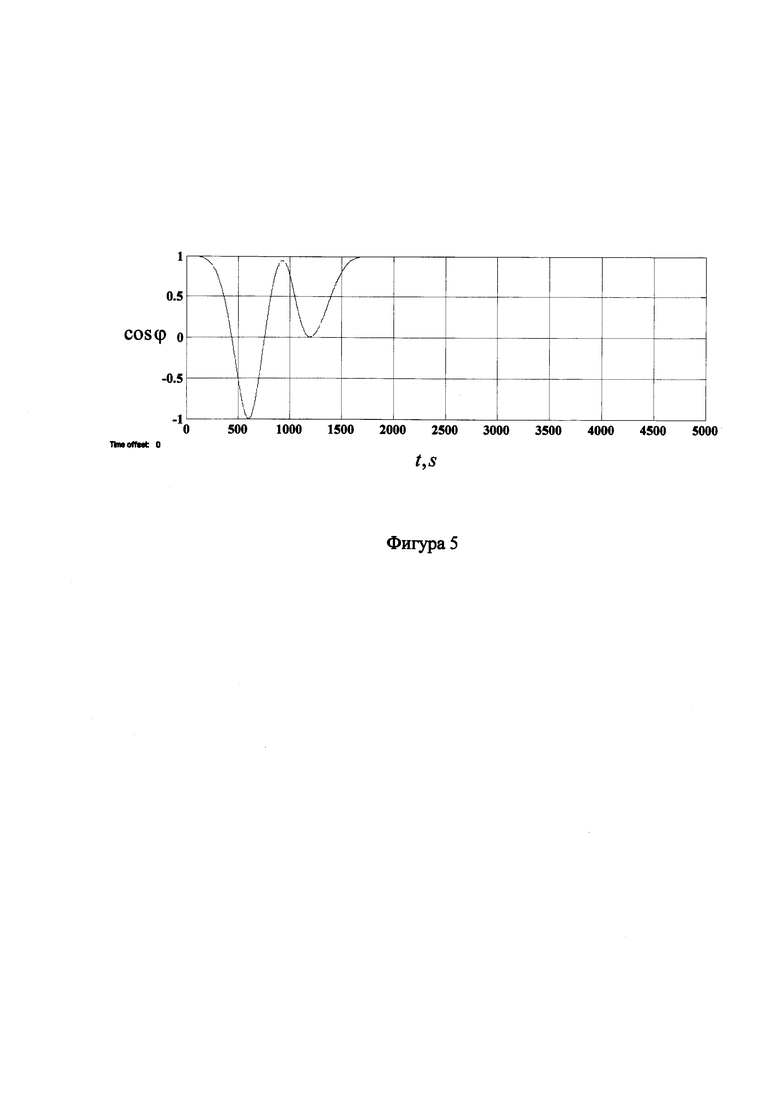
Отметим, что система астроориентации с обратными связями  не нуждается в применении кватернионов или вектора конечного поворота, но в тоже время позволяет выполнять программные повороты КА на неограниченные углы одновременно - по всем осям (курс, тангаж, крен) - фиг. 5. Отметим также, что астроориентация с обратными связями позволяет получить предельно малые ошибки ориентации:
не нуждается в применении кватернионов или вектора конечного поворота, но в тоже время позволяет выполнять программные повороты КА на неограниченные углы одновременно - по всем осям (курс, тангаж, крен) - фиг. 5. Отметим также, что астроориентация с обратными связями позволяет получить предельно малые ошибки ориентации:

где  - ошибки астродатчика,
- ошибки астродатчика,  - дрейф гироскопов БИУС. Например, для
- дрейф гироскопов БИУС. Например, для 
 и
и  ошибки ориентации КА составят:
ошибки ориентации КА составят:

Таким образом, система астроориентации орбитального КА с обратными связями позволяет существенно повысить качество управления угловым движением КА в орбитальном полете за счет реализации трехмерной программной ориентации и оптимизации переходных процессов параметров программного углового движения КА.
Литература.
1. Алексеев К.Б., Бебенин Г.Г. Управление космическими летательными аппаратами//М.: Машиностроение. 1974 г.
2. Анучин О.Н., Комарова И.Э., Перфильев Л.Ф. Бортовые системы навигации и ориентации искусственных спутников Земли// СПб.: ГНЦ РФ ЦНИИ «Электроприбор». 2004 г.
3. Боярчук К.А. и др. Система ориентации и стабилизации КА «Кондор-Э»//Труды секции 22 имени академика В.Н. Челомея XXXVIII-x Академических чтений по космонавтике. 2015. Т22. С408-434.
4. Бранец В.Н., Шмыглевский И.П. Применение кватернионов в задачах ориентации твердого тела// М.:.: Наука 1973 г.
5. Васильев В.Н. Системы ориентации космических аппаратов// М.: ФГУП «НПП «ВНИИЭМ». 2009.
6. Кавинов И.Ф. Инерциальная навигация в околоземном пространстве// М.: Машиностроение. 1988 г.
7. Каргу Л.И. Системы угловой стабилизации космических аппаратов// М.: Машиностроение. 1980 г.
8. Квазиус Г., Маккенлесс Ф. Проектирование систем астронавигации// М. Мир. 1970.
9. Кочетков В.И.. Системы астрономической ориентации космических аппаратов// М..: Машиностроение, 1980 г.
10. Раушенбах Б.В., Токарь Е.Н. Управление ориентацией космических аппаратов//М.: Наука. 1974 г.
11. Разработка систем космических аппаратов. Под редакцией П. Фортескью, Дж. Старка, Г. Суайнерда. М.: Альпина паблишер. 2017 г.
12. Соловьев В.А., Лысенко Л.Н., Любинский В.Е. Управление космическими полетами// МВТУ им. Н.Э. Баумана. 2009 г.
13. Солодов А.В. Инженерный справочник по космической технике//М.: издательство МО СССР. 1969 г.
14. Система ориентации и стабилизации космического аппарата по информации с астродатчиков/УЭлектронный журнал «Труды МАИ». Выпуск №38. 2017 г.
15. Современные проблемы ориентации и навигации космических аппаратов//Институт космических исследований РАН. Сборник трудов 2012 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ БЕСПЛАТФОРМЕННОГО ОРБИТАЛЬНОГО ГИРОКОМПАСА | 2015 |
|
RU2597015C1 |
| ГИРОКОМПАС ДЛЯ ОРБИТАЛЬНЫХ КОСМИЧЕСКИХ АППАРАТОВ | 2015 |
|
RU2597018C2 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ БЕСПЛАТФОРМЕННОГО ОРБИТАЛЬНОГО ГИРОКОМПАСА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2579387C1 |
| СПОСОБ КОРРЕКЦИИ И УСТРОЙСТВО ОРБИТАЛЬНОГО ГИРОКОМПАСА ДЛЯ УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2579406C1 |
| Способ астроориентации орбитального космического аппарата (варианты) | 2022 |
|
RU2793977C1 |
| Система восстановления курсовой ориентации космического аппарата с использованием орбитального гирокомпаса | 2017 |
|
RU2676844C1 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА В ПУТЕВОЙ СИСТЕМЕ КООРДИНАТ С ПРИВОДОМ ПОВОРОТА АППАРАТУРЫ НАБЛЮДЕНИЯ НАЗЕМНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2497728C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА В ПРОСТРАНСТВЕ С ИСПОЛЬЗОВАНИЕМ ОРБИТАЛЬНОГО ГИРОКОМПАСА | 2012 |
|
RU2509690C1 |
| Способ восстановления ориентации орбитального космического аппарата | 2015 |
|
RU2610766C1 |
| ГИРОКОМПАСНАЯ СИСТЕМА ОРИЕНТАЦИИ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 2014 |
|
RU2579384C1 |
Изобретение относится к области космической техники, а именно к системам ориентации космических аппаратов. Система астроориентации орбитального космического аппарата (КА) содержит датчик звезд (ДЗ), модуль расчета навигационно-баллистической информации (МРНБИ), модуль расчета матрицы стабилизации (МРМС), модуль расчета углов стабилизации (МРУ) и блок гироскопических измерителей угловой скорости (БИУС). Выходы ДЗ и МРНБИ подключены к первому и второму входам МРМС, выход которого подключен к входу МРУ. В систему введены: модуль расчета параметров программного движения КА (МРППД), модуль формирования матрицы стабилизации (МФМС), модуль компенсации взаимовлияния каналов (МКВК) и модуль формирования оптимизирующих программных функций (МФОПФ). Также введены три интегратора, три усилительно-согласующих блока (УСБ) и девять сумматоров. Каждый из выходов МРУ образует отдельные цепи из последовательно соединенных первых сумматоров, УСБ, вторых сумматоров, третьих сумматоров и интеграторов, выходы которых подключены ко вторым входам первых сумматоров и соответствующим входам МФМС. Вторые входы второй группы сумматоров подключены к соответствующим выходам БИУС, а их третьи входы подключены к соответствующим выходам МРППД, которые одновременно соединены с соответствующими входами МКВК. Первый, второй и третий выходы МКВК подключены к соответствующим вторым входам третьей группы сумматоров. Четвертый выход МРППД соединен с третьим входом МРМС, а его первый и второй входы соединены со вторым выходом МРНБИ и выходом МФОПФ. Выходы и входы интеграторов в каждом из каналов являются углами стабилизации КА по углам и угловым скоростям соответственно. Изобретение позволяет повысить качество управления КА в орбитальном полете. 5 ил.
Система астроориентации орбитального космического аппарата (КА), содержащая датчик звезд (ДЗ), модуль расчета навигационно-баллистической информации (МРНБИ), модуль расчета матрицы стабилизации (МРМС) и модуль расчета углов стабилизации (МРУ), причем выходы ДЗ и МРНБИ подключены к первому и второму входам МРМС, выход которого подключен к входу МРУ, а также блок гироскопических измерителей угловой скорости (БИУС), отличающаяся тем, что в нее введены: модуль расчета параметров программного движения КА (МРППД), модуль формирования матрицы стабилизации (МФМС), модуль компенсации взаимовлияния каналов (МКВК) и модуль формирования оптимизирующих программных функций (МФОПФ), а также три интегратора, три усилительно-согласующих блока (УСБ) и девять сумматоров, при этом каждый из выходов МРУ образует отдельные цепи из последовательно соединенных первых сумматоров, УСБ, вторых сумматоров, третьих сумматоров и интеграторов, выходы которых подключены ко вторым входам первых сумматоров и соответствующим входам МФМС, вторые входы второй группы сумматоров подключены к соответствующим выходам БИУС, а их третьи входы подключены к соответствующим выходам МРППД, которые одновременно соединены с соответствующими входами МКВК, первый, второй и третий выходы МКВК подключены к соответствующим вторым входам третьей группы сумматоров, кроме того, четвертый выход МРППД соединен с третьим входом МРМС, а его первый и второй входы соединены со вторым выходом МРНБИ и выходом МФОПФ, причем выходы и входы интеграторов в каждом из каналов являются углами стабилизации КА по углам и угловым скоростям соответственно.
| Система восстановления курсовой ориентации космического аппарата с использованием орбитального гирокомпаса | 2017 |
|
RU2676844C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ БЕСПЛАТФОРМЕННОГО ОРБИТАЛЬНОГО ГИРОКОМПАСА | 2015 |
|
RU2597015C1 |
| И | |||
| Н | |||
| Абезяев | |||
| ГИРОКОМПАС ДЛЯ ОРБИТАЛЬНЫХ КОСМИЧЕСКИХ АППАРАТОВ | |||
| Космические исследования, 2021, T | |||
| Устройство для охлаждения водою паров жидкостей, кипящих выше воды, в применении к разделению смесей жидкостей при перегонке с дефлегматором | 1915 |
|
SU59A1 |
| Приспособление для картограмм | 1921 |
|
SU247A1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ МОМЕНТА УПРАВЛЕНИЯ ПРИ РАЗВОРОТЕ КОСМИЧЕСКОГО АППАРАТА | 1995 |
|
RU2094332C1 |
| CN 105905317 B, 02.08.2019. | |||
