Изобретение относится к области космической техники и может быть использовано для эффективного управления угловым положением космических аппаратов (КА).
Существует много систем осуществления программного разворота космического аппарата. В аналогичной системе управления программным разворотом КА в требуемое конечное угловое положение вращения КА осуществляется по назначенным траекториям согласно концепции управления по ускорению. Кинематические уравнения желаемого движения космического аппарата при развороте записываются через компоненты кватерниона ,
,
где: Λ(t) кватернион, определяющий ориентацию связанных с КА осей относительно инерционного базиса;
Λн = Λ(o) кватернион начального положения КА;
Λк = Λ(Tзад) кватернион конечного положения КА (Крутько П.Д. Обратные задачи динамики управляемых систем М. Наука, 1988, с.168-178);
Символ ~ означает сопряженный кватернион, а ° обозначает операцию умножения кватернионов.
Функциональная схема системы аналога (фиг.1) содержит: 1 блок задания начального и конечного положения (БЗНКП), 2 блок задания моментов инерции (БЗМИ), 3 задатчик времени разворота (ЗВР), 4 бесплатформенную инерциальную навигационную систему (БИНС), 5 блок датчиков угловых скоростей (БДУС), 6 блок определения параметров разворотом (БОПР), 7 блок определения требуемой угловой скорости (БОТУС), 8 блок определения моментов управления (БОМУ).
В БИНС 4 по информации об угловой скорости  непрерывно определяется фактическое угловое положение L(t) которое при сравнении с требуемым конечным угловым положением Λк в БОПР 6 дает информацию N(t) о фазе процесса достижения требуемого положения. Вид назначенных траекторий движения КА содержит в качестве параметра время разворота Тзад, информация о котором берется с ЗВР 3. По кватерниону рассогласования N относительно достижения цели управления Λк и по информации об угловой скорости
непрерывно определяется фактическое угловое положение L(t) которое при сравнении с требуемым конечным угловым положением Λк в БОПР 6 дает информацию N(t) о фазе процесса достижения требуемого положения. Вид назначенных траекторий движения КА содержит в качестве параметра время разворота Тзад, информация о котором берется с ЗВР 3. По кватерниону рассогласования N относительно достижения цели управления Λк и по информации об угловой скорости  определяется желаемое изменение кватерниона N и соответственно, определяется угловая скорость
определяется желаемое изменение кватерниона N и соответственно, определяется угловая скорость  для того, чтобы вращение КА проходило по назначенной траектории. Управляющие моменты определяются БОМУ 8 путем отслеживания требуемой угловой скорости с высокой прочностью. При многих достоинствах систем, построенных по принципу управления по ускорению, применительно к управлению программным разворотом КА отмеченная система обладает существенным недостатком назначенные траектории должны задаваться аналитически. Более того, не любая назначенная траектория может быть реализована фактически в силу ограниченности управляющих моментов
для того, чтобы вращение КА проходило по назначенной траектории. Управляющие моменты определяются БОМУ 8 путем отслеживания требуемой угловой скорости с высокой прочностью. При многих достоинствах систем, построенных по принципу управления по ускорению, применительно к управлению программным разворотом КА отмеченная система обладает существенным недостатком назначенные траектории должны задаваться аналитически. Более того, не любая назначенная траектория может быть реализована фактически в силу ограниченности управляющих моментов  возможностями системы исполнительных органов
возможностями системы исполнительных органов  где mo максимально возможная величина управляющего момента, развиваемого исполнительными органами.
где mo максимально возможная величина управляющего момента, развиваемого исполнительными органами.
Ближайшим аналогом изобретения является система (патент RU N 2006431, B 64 G 1/24, 1994).
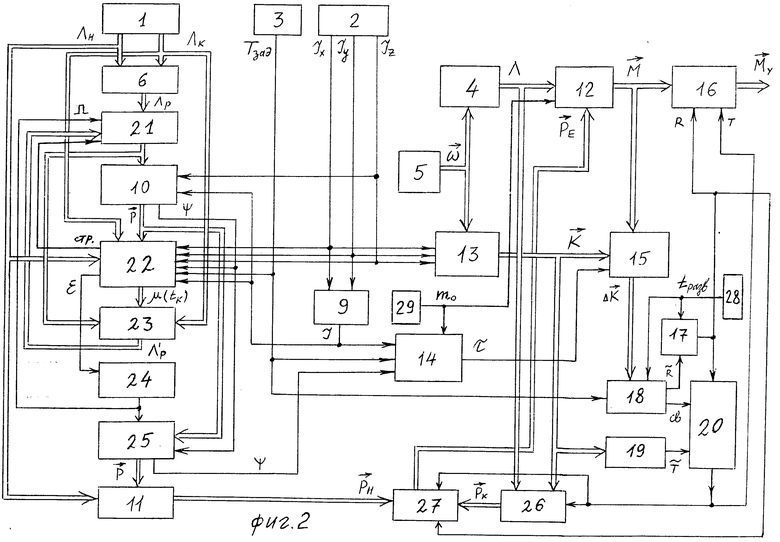
Функциональная схема системы-прототипа (фиг.2) включает в себя:
1 блок задания начального и конечного положений (БЗНКП), 2 блок задания моментов инерции (БЗМИ), 3 задатчик времени разворота (ЗВР), 4 - бесплатформенная инерциональная навигационная система (БИНС), 5 блок датчиков угловых скоростей (БДУС), 6 блок определения параметров разворота (БОПР), 9 блок определения момента инерции вокруг поперечной оси (БОМИПО), 10 блок прогноза вектора разворота (БПВР), 11 блок определения направления разгонного импульса (БОНРИ), 12 блок формирования момента управления (БФМУ), 13 блок определения кинетического момента (БОКМ), 14 блок определения времени разгона (БОВР), 15 блок определения отклонения кинетического момента от расчетного (БООКМ), 16 блок формирования разгонного и тормозного импульсов (БФРТИ), 17 блок определения момента разгона (БОМР), 18 блок определения момента свободного вращения (БОМСВ), 19 блок определения момента торможения (БОМТ), 20 блок логики, 21 блок обновления параметров разворота (БОБПР), 22 блок определения промаха разворота (БОПрР), 23 блок коррекции параметров разворота (БКПР), 24 блок сравнения промаха разворота с заданной величиной (БОПР), 25 блок фиксации вектора разворота (БФВР), 26 блок определения направления тормозного импульса (БОНТИ), 27 блок определения направления разворота (БОНР), 28 задатчик команды на начало разворота (ЗКНР), 29 задатчик максимальной величины управляющего момента (ЗМВУМ), при этом выход задания начального положения БЗНКП связан с соответствующими входами БОПР, БОПрР и входом ввода параметров углового положения БОНРИ, выход задания конечного положения БЗНКП связан с соответствующим БОПР, БОПрР и входом ввода требуемого углового положения БКПР, первый выход КЗМИ связан с первым входом БОМИПО, первым параметрическим входом БОКМ и первым входом ввода момента инерции вокруг поперечной оси БОПрР, второй выход БЗМИ связан со вторым входом БОМИПО, вторым параметрическим входом БОКМ и вторым входом ввода момента инерции вокруг поперечной оси БОПРР, третий выход БЗМИ связан с третьим параметрическим входом БОКМ, с входами ввода момента инерции вокруг продольной оси БПВР и БОПрР, выход ЗВР связан с параметрическим входом БОМСВ и входами ввода времени разворота БОПрР и БОВР, выход БИНС связан с входами ввода параметров углового положения БФМУ и БОНТИ, выход БДУС связан с входом БИНС и информационным входом БОКМ, выход БОПР связан с входом задания начальных условий БОбПР, выход БОМИНО, связан с входом ввода момента инерции вокруг поперечной оси БПВР, входом ввода момента инерции БОВР и входом ввода усредненного момента инерции БОПрР, выход вектора разворота БПВР связан с соответствующими входами БОПрР, БФВР, выход угла разворота БПВР связан с соответствующими входами БОПрП и БФВР, вход ввода вектора разворота БОНРИ с соответствующим выходом БФВР, выход БОНРИ связан с первым векторным входом БОНР, вход ввода вектора разворота БФМУ связан с выходом БОНР, выход БМФМУ связан с выходами задания управляющего момента БООКМ и БФРТИ, выход БОКМ связан с информационными входами БООМ, БОМТ и БОНТИ, выход БОВР связан с параметрическим входом БООКМ, выход которого связан с информационным входом БОМСВ, первый выход БОМСВ связан с логическим входом БОМР, выход которого связан с входами разрешения разгона БФРТИ, блока логики и БОНР, второй выход БОМОВ связан с входом разрешения свободного движения блока логики, выход БОМТ связан с входом разрешения блока логики, выход которого связан с входами разрешения торможения БФРТИ, бонти БОНТИ и БОНР, выход БОбПР связан с входами задания параметров разворота БПВР и БКПР, выход которого связан с входом ввода новых параметров разворота БОбПР, выход прогнозируемого положения БОПрР связан с соответствующим входом БКПР, выход ошибки разворота БОПрП связан с одновременным входом БСПР, выход которого связан с логическими входами БОбПР и БФВР, выход угла разворота БФВР связан с одноименным входом БОВР, выход БОНТИ связан со вторым векторным входом БОНР, выход ЗКНР связан с времязадающими входами БОМР и БОМСВ, выход ЗМВУМ связан с параметрическими входами БФМУ и БОВР, выход БФРТИ является выходом системы.
Определяющими характеристиками процесса разворота являются время разгона (торможения) τ которое вычисляется по соотношению:
где I момент инерции КА вокруг поперечной оси;
ψ угол процессии;
mo величина максимального момента управления;
Траз время разворота.
Вектор разворота  вычисляется в результате решения некоторого трансцендентного уравнения.
вычисляется в результате решения некоторого трансцендентного уравнения.
Работает система-прототип следующим образом.
Прежде всего определяется момент инерции вокруг поперечной оси блока 9. По начальному Λн и конечному Λк положениям в блоке 6 определяется кватернион разворота Λр Согласно полученному Λр и инерционным характеристикам I и IZ блоком 10 выдается угол прецессии ψ и направление кинетического момента  в связанной системе координат. Далее в блоке 22 моделируется движение объекта в ускоренном масштабе времени в предположении, что ему сообщили кинетический момент в полученном направлении
в связанной системе координат. Далее в блоке 22 моделируется движение объекта в ускоренном масштабе времени в предположении, что ему сообщили кинетический момент в полученном направлении  определяется величина промаха разворота ε и кватернион m(tк) Пока ε < εдоп фактическое угловое положение μ(tк) полученное моделированием в блоке 22, сравнивается с требуемым Λк и рассчитывается блоком 23 новый кватернион разворота, который через блок 21 поступает в качестве исходных данных в блок 10, рассчитывается новое направление
определяется величина промаха разворота ε и кватернион m(tк) Пока ε < εдоп фактическое угловое положение μ(tк) полученное моделированием в блоке 22, сравнивается с требуемым Λк и рассчитывается блоком 23 новый кватернион разворота, который через блок 21 поступает в качестве исходных данных в блок 10, рассчитывается новое направление  и т.д. Процесс повторяется. Как только ε ≥ εдоп блок 25 запоминает полученные в блоке 10 угол прецессии ψ и направление кинетического момента
и т.д. Процесс повторяется. Как только ε ≥ εдоп блок 25 запоминает полученные в блоке 10 угол прецессии ψ и направление кинетического момента  Далее это направление пересчитывается блоком 11 в направление относительно инерционального базиса
Далее это направление пересчитывается блоком 11 в направление относительно инерционального базиса  по формуле
по формуле  Запомненный угол прецессии ψ служит исходным для определения времени разгона (торможения) t По фактическому угловому положению, определенному БИНС, определяется действующий момент
Запомненный угол прецессии ψ служит исходным для определения времени разгона (торможения) t По фактическому угловому положению, определенному БИНС, определяется действующий момент  по которому в блоке 15 вычисляют расчетный кинетический момент
по которому в блоке 15 вычисляют расчетный кинетический момент 
В начальный момент времени 
В момент скачка времязадающего сигнала tразв 1 (поступила команда на разворот) появляется сигнал R 1 (разгон). Управляющий момент  Блок 5 измеряет абсолютную угловую скорость
Блок 5 измеряет абсолютную угловую скорость  и по данным oI вычисляется фактический кинетический момент
и по данным oI вычисляется фактический кинетический момент  в блоке 13, и разгон продолжается (R 1) до тех пор пока
в блоке 13, и разгон продолжается (R 1) до тех пор пока 
В момент времени, когда  объект предоставлен сам себе. По истечении расчетного времени сначала разворота формируется сигнал на торможение T 1, по которому блок 27 фиксирует направление
объект предоставлен сам себе. По истечении расчетного времени сначала разворота формируется сигнал на торможение T 1, по которому блок 27 фиксирует направление  вычисленное в блоке 28. Это направление сохраняется постоянным в инерционном пространстве. Блок 12 определяет момент
вычисленное в блоке 28. Это направление сохраняется постоянным в инерционном пространстве. Блок 12 определяет момент  Момент управления
Момент управления  направлен против фактического кинетического момента
направлен против фактического кинетического момента  и действует до полной остановки объекта
и действует до полной остановки объекта  Когда
Когда  сигнал
сигнал  разворот окончен. Система готова к следующему развороту.
разворот окончен. Система готова к следующему развороту.
Недостатком системы-прототипа является то, что момент окончания разворота (момент полной остановки КА) может отличаться от заданного времени.
Техническим результатом изобретения является повышение точности управления по времени окончания разворота космического аппарата.
Указанный технический результат достигается тем, что в систему определения момента управления при развороте КА, содержащую блок задания начального и конечного положений, блок задания моментов инерции, задатчик времени разворота, бесплатформенную инерциальную навигационную систему, блок датчиков угловых скоростей, блок определения параметров разворота, блок определения момента инерции вокруг поперечной оси, блок прогноза вектора разворота, блок определения направления разгонного импульса, блок формирования момента управления, блок определения кинетического момента, блок определения времени разгона, блок определения отклонения кинетического момента от расчетного, блок формирования разгонного и тормозного импульсов, блок определения момента разгона, блок определения момента свободного вращения, блок определения момента торможения, блок логики, блок обновления параметров разворота, блок определения промаха разворота, блок коррекции параметров разворота, блок сравнения промаха разворота с заданной величиной, блок фиксации вектора разворота, блок определения направления тормозного импульса, блок определения направления разворота, задатчик команды на начало разворота, задатчик максимальной величины управляющего момента, при этом выход задания начального положения блока задания начального и конечного положений связан с соответствующим входом блока определения параметров разворота, блока определения промаха разворота и входом ввода параметров углового положения блока определения направления разгонного импульса, выход задания конечного положения блока задания начального положений связан с соответствующим входом блока определения параметров разворота, блока определения промаха разворота и входом ввода требуемого углового положения блока коррекции параметров разворота, первый выход блока задания моментов инерции связан с первым входом блока определения момента инерции вокруг поперечной оси, первым параметрическим входом блока определения кинетического момента и первым входом ввода момента инерции вокруг поперечной оси блока определения промаха разворота, второй выход блока задания моментов инерции связан со вторым входом блока определения момента инерции вокруг поперечной оси, вторым параметрическим входом блока определения кинетического момента и вторым входом ввода момента инерции вокруг поперечной оси блока определения промаха разворота, третий выход блока задания моментов инерции связан с третьим параметрическим входом блока определения кинетического момента, с выходами ввода момента инерции вокруг продольной оси блока прогноза вектора разворота и блока определения промаха разворота, выход бесплатформенной инерциальной навигационной системы связан с входами ввода параметров углового положения блока формирования момента управления и блока определения направлния тормозного импульса, выход блока датчиков угловых скоростей связан с входом бесплатформенной инерциальной навигационной системы и информационным входом блока определения кинетического момента, выход блока определения параметров разворота связан с входом задания начальных условий блока обновления параметров разворота, выход блока определения момента инерции вокруг поперечной оси связан с входом ввода момента инерции вокруг поперечной оси блока прогноза вектора разворота, входом ввода момента инерции блока определения времени разгона и входом ввода усредненного момента инерции блока определения промаха разворота, выход вектора разворота блока прогноза вектора разворота связан с соответствующими входами блока определения промаха разворота, блока фиксации вектора разворота, выход угла разворота блока прогноза вектора разворота связан с соответствующими входами блока прогноза вектора разворота связан с соответствующими входами блока определения промаха разворота, блока фиксации вектора разворота, выход угла разворота блока прогноза вектора разворота связан с соответствующими входами блока определения промаха разворота, блока фиксации вектора разворота, вход ввода вектора разворота блока определения направления разгонного импульса, связан с соответствующим выходом блока фиксации вектора разворота, выход блока определения направления разгонного импульса связан с первым векторным входом блока определения направления разворота, вход ввода вектора разворота блока формирования момента управления связан с выходом блока определения направления разворота, выход блока формирования момента управления связан с входами задания управляющегося момента блока определения отклонения кинетического момента от расчетного и блока формирования разгонного и тормозного импульсов, выход блока определения кинетического момента связан с информационными входами блока определения отклонения кинетического момента от расчетного, блока определения момента торможения и блока определения направления тормозного импульса, выход блока определения времени разгона связан с параметрическим входом блока определения отклонения кинетического момента от расчетного, выход которого связан с информационным входом блока определения момента свободного вращения, первый выход блока определения момента свободного вращения связан с логическим входом блока определения момента разгона, выход которого связан с входами разрешения разгона блока формирования разгонного и тормозного импульсов, блока логики и блока определения направления разворотов, второй выход блока определения момента свободного вращения связан с входом разрешения свободного движения блока логики, выход блока определения момента торможения связан с входом разрешения блока логики, выход которого связан с входами разрешения торможения блока формирования разгонного и тормозного импульсов, блока определения направления тормозного импульса и блока определения направления разворота, выход блока обновления параметров разворота связан с входами задания параметров разворота блока прогноза вектора разворота и блока коррекции параметров разворота, выход которого связан с входом ввода новых параметров разворота блока обновления параметров разворота, управляющий выход блока определения промаха разворота с управляющим входом блока обновления параметров разворота, выход прогнозируемого положения блока определения промаха разворота связан с соответствующим входом блока коррекции параметров разворота, выход ошибки разворота блока определения промаха разворота связан с одноименным входом блока сравнения промаха разворота с заданной величиной, выход угла разворота блока фиксации вектора разворота связан с одноименным входом блока определения времени разгона, выход блока определения направления тормозного импульса связан со вторым векторным входом блока определения направления разворота, выход задатчика команды на начало разворота связан с времязадающими входами блока определения момента разгона и блока определения момента свободного вращения, выход блока формирования разгонного и тормозного импульсов является выходом системы.
Выход задатчика максимальной величины управляющего момента связан с параметрическими входами блока формирования момента управления и блока определения времени разгона, причем блок определения промаха разворота состоит из блока определения наличия вектора разворота, блока моделирования движения аппарата, блока формирования управляющего сигнала, блока фиксация прогнозируемого положения, при этом выход блока определения наличия вектора разворота связан с управляющим входом блока моделирования движения аппарата, выход которого связан с информационными входами блока формирования управляющего сигнала и блока фиксации прогнозируемого положения, вход задания начального положения блока моделирования движения аппарата является одноименным входом блока определения промаха разворота, первый, второй и третий входы задания моментов инерции блока моделирования движения аппарата являются соответствующими входами блока определения промаха разворота, вход ввода угла разворота блока моделирования движения аппарата является одноименным входом блока определения промаха разворота, вход ввода времени разворота блока моделирования движения аппарата является одноименным входом блока определения промаха разворота, установочный вход блока формирования управляющего сигнала является входом задания конечного положения блока определения промаха разворота, управляющий выход блока формирования управляющего сигнала является управляющим выходом блока определения промаха разворота и связан с управляющим входом блока фиксации прогнозируемого положения, выход промаха разворота блока формирования управляющего сигнала связан с информационным входом блока фиксации прогнозируемого положения, выходы которого являются выходами блока пределения промаха разворота, в отличии от прототипа введен блок определения поправки времени разворота, блок коррекции времени разворота, блок определения времени торможения, вычитающее устройство, блок сравнения прогнозируемого времени разворота с заданной величиной, схема логического ИЛИ, при этом выход задатчика времени разворота связан с входами задания времени разворота блока определения поправки времени разворота, блока коррекции времени разворота, блока сравнения прогнозируемого времени разворота с заданной величиной и первым входом вычитающего устройства, выход блока определения кинетического момента связан с информационным входом блока определения времени торможения, управляющий выход блока определения промаха разворота связан с управляющим входом блока определения поправки времени разворота, выход времени окончания маневра блока определения промаха разворота связан с одноименными входами блока сравнения прогнозируемого времени разворота с заданной величиной и блока определения поправки времени разворота, выход которого связан с входами ввода поправки по времени разворота блока определения промаха разворота и блока коррекции времени разворота, выход которого связан с входом ввода времени разворота блока определения времени разгона, выход задатчика максимальной величины управляющего момента связан с параметрическим входом блока определения времени торможения, выход которого связан со вторым входом вычитающего устройства, выход блока определения поправки времени разворота связан входом ввода времени разворота блока определения промаха разворота, выход вычитающего устройство связан с параметрическим входом блока определения момента свободного вращения, первый вход схемы логического ИЛИ связан с выходом блока сравнения промаха разворота с заданной величиной, второй вход схемы логического ИЛИ связан с выходом блока сравнения прогнозируемого времени разворота с заданной величиной, выход схемы логического ИЛИ связан с логическими входами блока обновления параметров разворота и блока фиксации вектора разворота, а в блок определения промаха разворота введен счетчик времени, причем вход запуска счетчика времени связан с выходом блока определения наличия вектора разворота, вход останова счетчика времени связан с управляющим выходом блока формирования управляющего сигнала, выход счетчика времени является выходом прогнозируемого времени разворота блока определения промаха разворота.
Суть изобретения можно пояснить следующим образом.
В предлагаемой системе управляющие моменты формируются только при разгоне и торможении объекта. В системе автоматически определяется такой требуемый импульс с кинетического момента  сообщение которого корпуса КА гарантирует достижение через заданное время Tзад требуемого углового положения εдоп с любой допустимой точностью как по положению Λк так и по времени Δt
сообщение которого корпуса КА гарантирует достижение через заданное время Tзад требуемого углового положения εдоп с любой допустимой точностью как по положению Λк так и по времени Δt
Отличительной особенностью системы является определение в ней поправки времени разворота, коррекции времени разворота и определение времени торможения. Расчет требуемого кинетического момента  носит иттерационный характер и учитывает не только ошибку по угловому положению ΔΛ но и прогнозируемое время окончания разворота tk.
носит иттерационный характер и учитывает не только ошибку по угловому положению ΔΛ но и прогнозируемое время окончания разворота tk.
Математическая модель вращательного движения твердого тела в поле тяготения Земли, которая входит в блок определения промаха разворота, описывается в предлагаемой системе той же системой уравнений, что и в системе-прототипе. Но в отличие от прототипа контролируются не только компоненты кватерниона, но и время, а по окончании прогноза углового движения аппарата наряду с прогнозируемым угловым положением и ошибкой по положению фиксируется время окончания разворота.
Направление считается найденным, когда  и
и  (в идеале ε 1 и Tk tзад).
(в идеале ε 1 и Tk tзад).
Наличие в системе блока определения поправки времени разворота, блока коррекции времени разворота и бока определения времени торможения делает ее существенно отличной от системы-прототипа.
Сущность изобретения поясняется чертежами, где на фиг.1 приведена функциональная схема системы-аналога; на фиг.2 функциональная схема системы-прототипа; на фиг. 3 функциональная схема предлагаемой системы; на фиг. 4 функциональная схема БОПрР (22); на фиг. 5 схема реализации БОПрР (22);
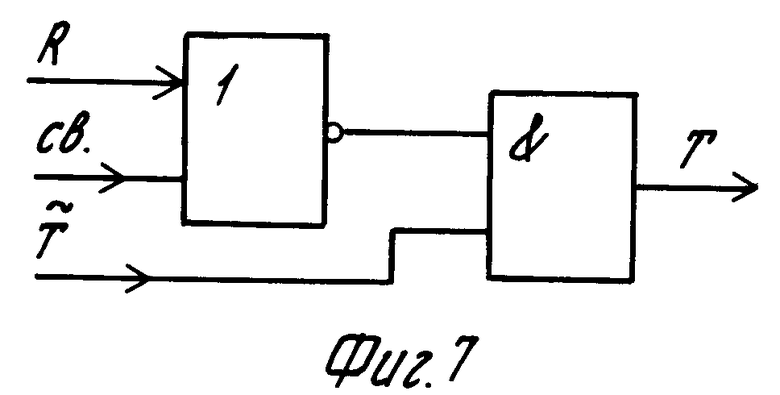
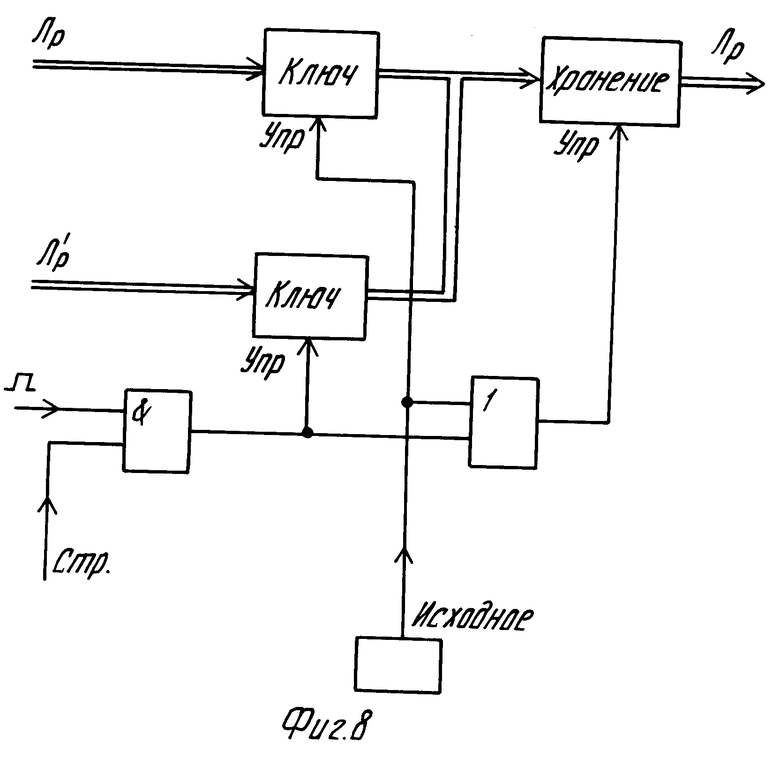
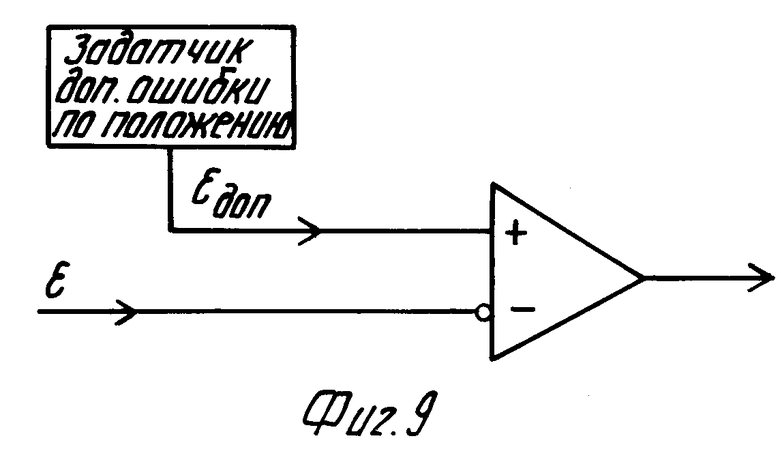
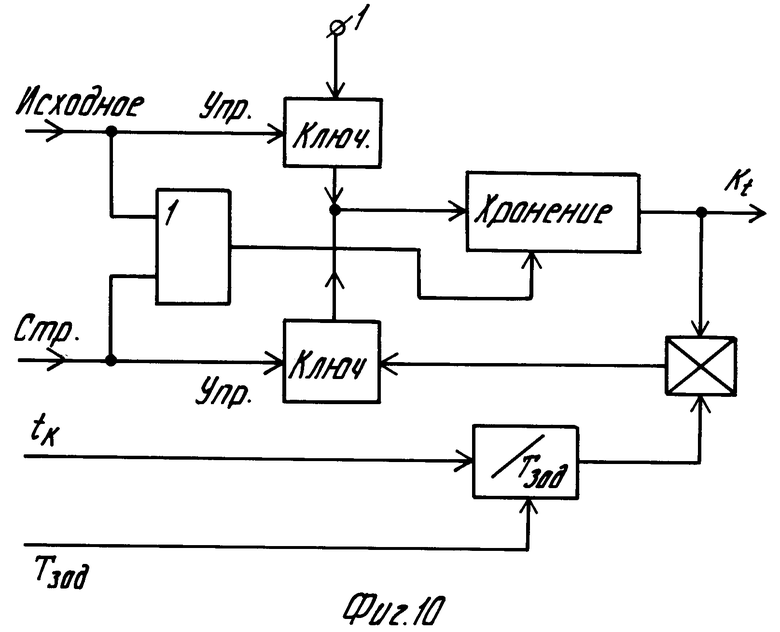
На фиг. 6 схема выполнения БОМСВ (18); на фиг. 7 схема выполнения блока логики; на фиг. 8 схема реализации БОбПР (21); на фиг. 9 схема реализации БСПР (24); на фиг. 10 схема реализации БОПВР (31); на фиг. 11 - схема реализации БОВТ (32); на фиг. 12 схема реализации БСВР (34); на фиг. 13 схема реализации БОВР (14); на фиг. 14 временные диаграммы процесса разворота КА.
Функциональная схема предлагаемой системы представлена на фиг.3 и 4, где 1 блок задания начального и конечного положений (БЗНКП), 2 блок задания моментов инерции (БЗМИ), 3 задатчик времени разворота (ЗВР), 4 - бесплатформенная инерциальная навигационная система (БИНС), 5 блок датчиков угловых скоростей (БДУС), 6 блок определения параметров разворота (БОПР), 9 блок определения момента инерции вокруг поперечной оси (БОМИПО), 10 блок прогноза вектора разворота (БПВР), 11 блок определения направления разгонного импульса (БОНРИ), 12 блок формирования момента управления (БФМУ), 13 блок определения кинетического момента (БОКМ), 14 блок определения времени разгона (БОВР), 15 блок определения отклонения кинетического момента от расчетного (БООКМ), 16 блок формирования разгонного и тормозного импульсов (БФРТИ), 17 блок определения момента разгона (БОМР), 18 блок определения момента свободного вращения (БОМСВ), 19 блок определения момента торможения (БОМТ), 20 блок логики, 21 блок обновления параметров разворота (БОбПР), 22 блок определения промаха разворота (БОПрР), 23 блок коррекции параметров разворота (БКПР), 24 блок сравнения промаха разворота с заданной величиной (БСПР), 25 блок фиксации вектора разворота (БФВР), 26 блок определения направления тормозного импульса (БОНТИ), 27 блок определения направления разворота (БОНР), 28 задатчик команд на начало разворота (ЗКНР), 31 блок определения поправки времени разворота (БОПВР), 30 блок коррекции времени разворота (БКВР), 29 задатчик максимальной величины управляющего момента (ЗМВУМ), 32 блок определения времени торможения (БОВТ), 33 - вычитающее устройство (БУ), 34 блок сравнения прогнозируемого времени разворота с заданной величиной (БСВР), 35 схема логического ИЛИ, 36 блок определения наличия вектора разворота (БОНВР), 37 блок моделирования движения аппарата (БМДА), 38 блок формирования управляющего сигнала (БФУС), 39 блок фиксации прогнозируемого положения (БФПП), 40 счетчик времени (СВ), при этом БОПрР состоит из БОНВР, БМДА, БФУС, БФПП и счетчика времени, причем выход БОНВР связан с управляющим входом БМДА выход которого связан с информационными входами БФУС и БФПП, вход задания начального положения БМДА является одноименным входом БОПрР, первый, второй и третий входы задания моментов инерции БМДА являются соответствующими взводами БОПрР, вход ввода угла разворота БМДА является одноименным входом БОПрР, вход ввода времени разворота БМДА является одноименным входом БОПрР, установочный вход БФУС является входом задания конечного положения БОПрР, управляющий выход БФУС является управляющим выходом БОПрР и связан с управляющим входом БФПП, выход промаха разворота БФУС связан с информационным входом БФПП, выходы которого являются выходами БОПрР, вход запуска счетчика времени связан с выходом БОНВР, вход останова счетчика времени связан с управляющим выходом БФУС, выход счетчика времени является выходом прогнозируемого времени разворота БОПрР, выход задания начального положения БЗНКП связан с соответствующим входом БОПР, БОПрР и входом ввода параметров углового положения БОНРИ, выход задания конечного положения БЗНКП связан с соответствующим входом БОПР, БОПрР и входом ввода требуемого углового положения БКПР.
Первый выход БЗМИ связан с первым входом БОМИПО, первым параметрическим входом БОКМ и первым входом ввода момента инерции вокруг поперечной оси БОПрР, второй выход БЗМИ связан со вторым входом БОМИПО, вторым параметрическим входом БОКМ и вторым входом ввода момента инерции вокруг поперечной оси БОПрР, третий выход БЗМИ связан с третьим параметрическим входом БОКМ, с входами ввода момента инерции вокруг продольной оси БПВР и БОПрР, выход задатчика времени разворота связан с входами задания времени разворота БОПВР, БКВР, БОВР и первым входом вычитающего устройства, выход БИНС связан с входами ввода параметров углового положения БФМУ и БОНТИ, выход БДУС связан с входом БИНС и информационным входом БОКМ, выход БОПР связан с входом задания начальных условий БОбПР, выход БОМИПО связан с входом ввода момента инерции вокруг поперечной оси БПВР, входом ввода момента инерции БОВР и входом ввода усредненного момента инерции БОПрР, выход вектора разворота БПВР связан с соответствующими входами БОПрР, БФВР, выход угла разворота БПБР связан с соответствующими входами БОПР, БФВР, вход ввода вектора разворота БОНРИ связан с соответствующим входом БФВР, выход БОНРИ связан с первым векторным входом БОНР, вход ввода разворота БФМУ связан с выходом БОНР, выход БФМУ связан с входами задания управляющего момента БООКМ и БФРТИ, выход БОКМ связан с информационными входами БООКМ, БОМТ, БОНТИ и БОВТ, выход БОВР связан с параметрическим входом БООКМ, выход которого связан с информационным входом БОМСВ, первый выход БОСМВ связан с логическим входом БОМР, выход которого связан с входами разрешения разгона БФРТИ, блока логики и БОНР, второй выход БОМСВ связан с входом разрешения свободного движения блока логики, выход БОМТ связан с входом разрешения блока логики, выход которого связан с входами разрешения торможения БФРТИ, БОНТИ, и БОНР, выход БОбПР связан с входами задания параметров разворота БПВР и БКПР, выход которого связан с входом ввода новых параметров разворота БОбПР, выход прогнозируемого положения блока определения промаха разворота связан с соответствующим входом БКПР, выход ошибки разворота БОПрР связан с одноименным входом БСПР, выход угла разворота БФВР связан с одноименным входом БОВР, выход БОНТИ связан со вторым векторным входом БОНР, выход задатчика команды на начало разворота связан с времязадающими входами БОМР и БОМСВ, выход задатчика максимальной величины управляющего момента связан с параметрическими входами БФМУ, БОВР и БОВТ, выход которого связан со вторым входом вычитающего устройства, управляющий выход БОПрР связан с управляющими входами БОбПр и БОПВР, выход времени окончания маневра БОПрР связан с одноименными входами БСВР и БОПВР, выход которого связан с входами ввода поправки по времени разворота БОПрР и БКВР, выход которого связан с входом ввода времени разворота БОВР, выход БОВР связан входом ввода времени разворота БОПрР, выход вычитающего устройства связан с параметрическим входом БОМСВ, первый вход схемы логического ИЛИ связан с выходом БСПР, второй вход схемы логического ИЛИ связан с выходом БСВР, выход схемы логического ИЛИ связан с логическими входами БОбПР и БФВР, выход БФРТИ является выходом системы.
Реализация отдельных блоков и элементов предлагаемой системы выполнены на интегральных схема и стандартных аналоговых модулях (фиг.4 13).
БОПР 6 вычисляет кватернион разворота по формуле  и состоит из блока взятия сопряженного кватерниона и блока перемножения кватернионов.
и состоит из блока взятия сопряженного кватерниона и блока перемножения кватернионов.
БОМИПО 9 усредняет моменты инерции вокруг поперечных осей Ix и Iy по выражению I (Ix + Iy)/2
БПВР 10 как и в прототипе определяет вектор разворота  и угол поворота КА вокруг него ψ (угол прецессии), соответствующие развороту динамически симметричного тела с моментами инерции I, IZ на кватернион Lр.
и угол поворота КА вокруг него ψ (угол прецессии), соответствующие развороту динамически симметричного тела с моментами инерции I, IZ на кватернион Lр.
БОНРИ 11 реализует соотношение  .
.
БФМУ 12 вычисляет потребный момент управления  исходя из фактического углового положения Λ и вектора разворота
исходя из фактического углового положения Λ и вектора разворота  и реализует функцию
и реализует функцию  .
.
БОКС 13 осуществляет умножение вектора на диагональную матрицу по выражению 
БОВР 14 (фиг.13) вычисляет время разгона τр(1).
БОМСВ 18 (фиг.6) состоит из блока возведения вектора в квадрат, генератора линейно-изменяющегося напряжения (ГЛИН), двух компараторов 51 и 52, триггера и логических схем. При подаче на времязадающий вход сигнала разрешения на разворот (tразв 1) изменяются  и растет сигнал t на выходе ГЛИН, Так как
и растет сигнал t на выходе ГЛИН, Так как  то
то  и поэтому на выходе компаратора 52 установлен логический 0, а
и поэтому на выходе компаратора 52 установлен логический 0, а  продолжает быть. Поэтому cb 0. В момент, когда
продолжает быть. Поэтому cb 0. В момент, когда  схема 51 устанавливает лог.0, по которому переключается триггер и
схема 51 устанавливает лог.0, по которому переключается триггер и  а cb 1. По мере течения времени t, растет и в момент, когда t > Tзад τт на выходе компаратора 52 установится: 1 и соответственно cb 0.
а cb 1. По мере течения времени t, растет и в момент, когда t > Tзад τт на выходе компаратора 52 установится: 1 и соответственно cb 0.
Блок логики выделяет команду на торможение Т из сигнала  с БОМТ 19, исходя из наличия сигналов cb. и R. Он реализует логическую функцию
с БОМТ 19, исходя из наличия сигналов cb. и R. Он реализует логическую функцию  где обозначено: ⊕ операция ИСКЛЮЧАЮЩЕЕ ИЛИ, V операция ИЛИ.
где обозначено: ⊕ операция ИСКЛЮЧАЮЩЕЕ ИЛИ, V операция ИЛИ.
БОбПР 21 (фиг.8) служит для смены значений параметров разворота по сигналу стробирования.
Блоки БООКМ 15, БФРТИ 16, БОМР 17, БОМТ 19, БКПР 23, БФВР 25, БОНТИ 26, БОНР 27 полностью идентичны соответствующим блокам системы-прототипа. А вот блок БОПрР 22 наделен дополнительными функциями и конструктивно выполнен по-новому.
БОПрР 22 представляет собой математическую модель вращательного движения твердого тела в гравитационном поле Земли (фиг. 5). Начальные условия  определяются начальным положением и вектором разворота
определяются начальным положением и вектором разворота  а также инерционными характеристиками Ix, Iy, Iz, углом разворота ψ и временем разворота Tзад. Требуемую на начало участка свободного движения угловую скорость определяет блок 43 по вычислительной схеме (фиг.5).
а также инерционными характеристиками Ix, Iy, Iz, углом разворота ψ и временем разворота Tзад. Требуемую на начало участка свободного движения угловую скорость определяет блок 43 по вычислительной схеме (фиг.5).
БОПрР состоит из определителя наличия вектора разворота, который выдает импульс запуска интеграторов и схемы формирования гармонических функций 42. Блоком 44 вычисляется ориентация связанных осей относительно орбитальной системы координат Lот = Λор ° μ(t), из которой блок 45 определяет направляющие косинусы β1; β2; β3 по известным соотношениям.
Блоки 47, 48 совместно с 44, 45, 48 образуют динамический контур математической модели. Блок 49 и интегратор моделируют кинематические уравнения. Блоки 46, 48 необходимые для формирования попарных произведений ω1ω2; ω1ω3; ω2ω3 и β1β2; β1β3; β2β3, которые входят в правые части динамических уравнений математической модели.
Блок 47 формирует угловое ускорение  коэффициенты передачи по входам соответственно равны
коэффициенты передачи по входам соответственно равны
(Iy-Iz)/Ix, (Iz-Ix)/Iy, (Ix-Iy)/Iz.
Таким образом, блоки 44, 45, 46 формируют гравитационные возмущения, блок 48 центробежные возмущения. Их сумма (суммирование производится поканально), умноженная на матрицу коэффициентов передачи (блок 47) и даст угловое ускорение  которое после интегрирования с учетом начальных условий
которое после интегрирования с учетом начальных условий  даст угловую скорость
даст угловую скорость 
Степень отдаленности моделируемого положения m от конечного Lк определяется блоками по выражению .
.
В момент начала спада ε схемы хранения аналоговых сигналов фиксируют лучшие значения e и μ(tк) а также прогнозируемое время окончания маневра tк.
БСПР 24 представляет собой компаратор, сравнивающий выдаваемый БСПрР ε с допустимым значением eдоп задаваемым соответствующим задатчиком, и формирует лог.0, когда ε ≥ εдоп (фиг.9).
БОНР 27 устанавливает на выходе либо направление разгонного импульса  (если R 1), либо направление тормозного импульса
(если R 1), либо направление тормозного импульса  (если T 1). Если оба логических сигнала отсутствуют R T 0, то на выходе БОНР устанавливается нулевой вектор
(если T 1). Если оба логических сигнала отсутствуют R T 0, то на выходе БОНР устанавливается нулевой вектор 
БКВР 30 производит деление заданного времени разворота Tзад на коэффициент временной поправки Kt; Tраз Tзад/Kt.
БОПВР 31 сравнивает прогнозируемое время разворота tк, полученное в БОПрР 22, с заданным временем Tзад формирует и фиксирует поправку к времени разворота Kt согласно рекурентному соотношению
где  предыдущее значение поправки (K
предыдущее значение поправки (K
ВБОВТ 32 определяет время торможения τт исходя из фактических кинематических параметров движения KA по выражению
Вычитающее устройство 33 производит вычитание сигнала τт поступающего на его второй вход, из сигнала первого входа Tзад, и устанавливает на своем выходе разность Tзад - τт
БОВР 34 сравнивает выдаваемое БОПрР прогнозируемое время окончания маневра tк с заданным временем разворота Tзад и формирует логическую 1 пока  (фиг.12).
(фиг.12).
Рассмотрим принцип действия и работу системы.
Прежде всего определяется момент инерции вокруг поперечной оси I БОМИПО 9. По начальному Λн и конечному Λк положениям в БОПР 6 определяется кватернион разворота Λр Согласно полученному Λр и инерционных характеристик I и Iz БПВР 10 выдается угол процессии ψ и направление кинетического момента  в связанной системе координат. Далее в БОПрР 22 моделируется движение объекта в ускоренном масштабе времени в предположении, что ему сообщили кинематический момент в полученном направлении
в связанной системе координат. Далее в БОПрР 22 моделируется движение объекта в ускоренном масштабе времени в предположении, что ему сообщили кинематический момент в полученном направлении  и расчетной величины, определяется величина промаха разворота ε кватернион m(tк) и прогнозируемое время окончания разворота tк пока ε < εдоп или
и расчетной величины, определяется величина промаха разворота ε кватернион m(tк) и прогнозируемое время окончания разворота tк пока ε < εдоп или  фактическое угловое положение μ(tк) полученное моделированием в БОПрР 22, сравнивается с требуемым Λк и рассчитывается БКПР 23 новый кватернион разворота, который через БОбПР 21 поступает в качестве исходных данных в БПВР 10, рассчитывается новое направление
фактическое угловое положение μ(tк) полученное моделированием в БОПрР 22, сравнивается с требуемым Λк и рассчитывается БКПР 23 новый кватернион разворота, который через БОбПР 21 поступает в качестве исходных данных в БПВР 10, рассчитывается новое направление  БОПВР 31 сравнивает прогнозируемое время разворота tк с заданной величиной Tзад и формирует поправку к времени разворота Kt и т.д. процесс повторяется.
БОПВР 31 сравнивает прогнозируемое время разворота tк с заданной величиной Tзад и формирует поправку к времени разворота Kt и т.д. процесс повторяется.
Как только  логический сигнал на выходе схемы ИЛИ пропадет и итерационный процесс, реализованный блоками 21, 10, 22, 23, 29 прекращается, БФВР 25 фиксирует полученные в БПВР 10 угол прецессии ψ и направление кинетического момента
логический сигнал на выходе схемы ИЛИ пропадет и итерационный процесс, реализованный блоками 21, 10, 22, 23, 29 прекращается, БФВР 25 фиксирует полученные в БПВР 10 угол прецессии ψ и направление кинетического момента  Далее это направление пересчитывается БОНРИ 11 в направлении относительно инерциального базиса
Далее это направление пересчитывается БОНРИ 11 в направлении относительно инерциального базиса  по формуле
по формуле
Зафиксированный угол прецессии ψ служит исходным для определения времени разгона tр с учетом поправки Kt по фактическому угловому положению, определенному БИНС 4, определяется действующий момент  по которому в БООКМ 15 вычисляется расчетный кинетический момент
по которому в БООКМ 15 вычисляется расчетный кинетический момент 
Временные диаграммы процесса разворота представлены на фиг.14. В начальный момент времени  В момент скачка tразв 1 (поступила команда на разворот) появляется сигнал R 1 (разгон) и запускается счетчик времени в БОМСВ 18. Управляющий момент
В момент скачка tразв 1 (поступила команда на разворот) появляется сигнал R 1 (разгон) и запускается счетчик времени в БОМСВ 18. Управляющий момент  БДУС 5 измеряет абсолютную угловую скорость
БДУС 5 измеряет абсолютную угловую скорость  вычисляется фактический кинетический момент в БОКМ 13 и разгон продолжается (R 1) до тех пор, пока
вычисляется фактический кинетический момент в БОКМ 13 и разгон продолжается (R 1) до тех пор, пока  В момент времени, когда
В момент времени, когда  R 0 и
R 0 и  объект предоставлен сам себе, БОВТ 32 определяет время необходимое для торможения KA τт БОМСВ 18 непрерывно сравнивает текущее время с начала разворота t с рассчитанной здесь же величиной Tзад-τт а в момент, когда t ≥ Tзад - τт формируется сигнал на торможение T 1, по которому БФВР 25 фиксирует направление
объект предоставлен сам себе, БОВТ 32 определяет время необходимое для торможения KA τт БОМСВ 18 непрерывно сравнивает текущее время с начала разворота t с рассчитанной здесь же величиной Tзад-τт а в момент, когда t ≥ Tзад - τт формируется сигнал на торможение T 1, по которому БФВР 25 фиксирует направление  вычисляемое в БОНТИ 26 по выражению
вычисляемое в БОНТИ 26 по выражению
tТ время начала торможения.
Это направление сохраняется постоянным в инерциальном пространстве, БФМУ 12 определяет момент  Момент управления
Момент управления  направлен против фактического кинетического момента
направлен против фактического кинетического момента  и действует до полной остановки объекта
и действует до полной остановки объекта  Когда
Когда  сигнал T 0 и
сигнал T 0 и  tразв= 0, разворот окончен. Система готова к следующему развороту.
tразв= 0, разворот окончен. Система готова к следующему развороту.
Эффективность предлагаемой системы определяется прежде всего тем, что она учитывает требование терминальности управления (т.е. окончание поворотного маневра в строго назначенное время Tзад), что особенно важно в случае построения ориентации KA относительно подвижной системы координат (например, орбитальной системы координат).
Математическое моделирование работы предлагаемой системы на ПЭВМ позволяет оценить эту точность выполнения разворота по времени. Была проведена серия численных экспериментов, моделирующих процесс разворота KA с моментами инерции Ix 5385873 кг•м2, Iy 7158641 кг•м2, Iz 2274242 кг•м2. Для каждого разворота из серии были получены оценки точности окончания маневра, обеспечиваемые системой-прототипом и предлагаемой системой. Исходные данные для анализа сравниваемых систем (начальные и конечные угловые положения KA, время разворота, инерционные характеристики KA) были одинаковыми. Средняя угловая скорость при развороте считалась равной ω 0,2 о/с.
Для системы-прототипа ошибка по времени окончания разворота составила порядка 5-8% от времени разворота, а для предлагаемой системы эта ошибка не зависит от времени разворота и не превышает заданной величины Dt 0,5 с.
Использование: в области космической техники, для эффективного управления угловым положением космических аппаратов (КА). Сущность изобретения: система содержит совокупность функциональных блоков, посредством которых автоматически определяется импульс кинетического момента, переводящий КА в процессе его свободного движения, из заданной начальной к требуемой конечной ориентации, при этом алгоритмически решается краевая задача определения начальных угловых скоростей КА, обеспечивающих указанный перевод КА за заданное время, исходя из чего, система определяет необходимые для данного маневра управляющие моменты разгона и торможения. Между участками разгона и торможения КА управляющий момент равен нулю. Контроль за разворотом КА производят бесплатформенная инерциальная навигационная система и ряд блоков для определения и формирования кинематических и управляющих параметров маневра разворота КА. 14 ил.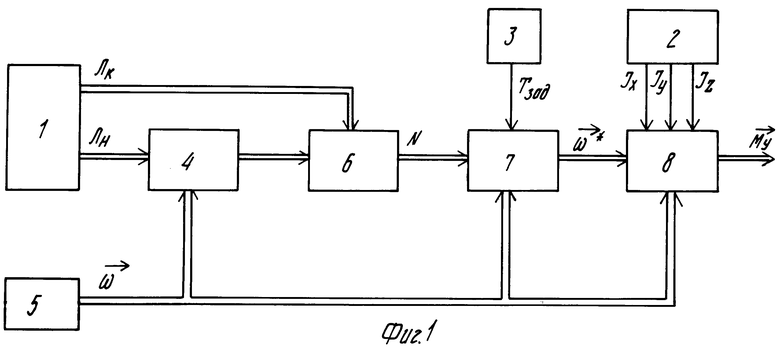
Система определения момента управления при развороте космического аппарата, включающая блок задания начального и конечного положений, блок задания моментов инерции, задатчик времени разворота, бесплатформенную инерциальную навигационную систему, блок датчиков угловых скоростей, блок определения параметров разворота, блок определения момента инерции вокруг поперечной оси, блок прогноза вектора разворота, блок определения направления разгонного импульса, блок формирования момента управления, блок определения кинетического момента, блок определения времени разгона, блок определения отклонения кинетического момента от расчетного, блок формирования разгонного и тормозного импульсов, блок определения момента разгона, блок определения момента свободного вращения, блок определения момента торможения, блок логики, блок обновления параметров разворота, блок определения промаха разворота, блок коррекции параметров разворота, блок сравнения промаха разворота с заданной величиной, блок фиксации вектора разворота, блок определения направления тормозного импульса, блок определения направления разворота, задатчик команды на начало разворота, задатчик максимальной величины управляющего момента, при этом выход задания начального положения блока задания начального и конечного положений связан с соответствующим входом блока определения параметров разворота, блока определения промаха разворота и входом ввода параметров углового положения блока определения направления разгонного импульса, выход задания конечного положения блока задания начального и конечного положений связан с соответствующим входом блока определения параметров разворота, блока определения промаха разворота и входом ввода требуемого углового положения блока коррекции параметров разворота, первый выход блока задания моментов инерции связан с первым входом блока определения момента инерции вокруг поперечной оси, первым параметрическим входом блока определения кинетического момента и первым входом ввода момента инерции вокруг поперечной оси блока определения промаха разворота, второй выход блока задания моментов инерции связан с вторым входом блока определения момента инерции вокруг поперечной оси, вторым параметрическим входом блока определения кинетического момента и вторым входом ввода момента инерции вокруг поперечной оси блока определения промаха разворота, третий выход блока задания моментов инерции связан с третьим параметрическим входом блока определения кинетического момента, с входами ввода момента инерции вокруг продольной оси блока прогноза вектора разворота и блока определения промаха разворота, выход бесплатформенной инерциальной навигационной системы связан с входами ввода параметров углового положения блока формирования момента управления и блока определения направления тормозного импульса, выход блока датчиков угловых скоростей связан с входом бесплатформенной инерциальной навигационной системы и информационным входом блока определения кинетического момента, выход блока определения параметров разворота связан с входом задания начальных условий блока обновления параметров разворота, выход блока определения момента инерции вокруг поперечной оси связан с входом ввода момента инерции вокруг поперечной оси блока прогноза вектора разворота, входом ввода момента инерции блока определения времени разгона и входом ввода усредненного момента инерции блока определения промаха разворота, выход вектора разворота блока прогноза вектора разворота связан с соответствующими входами блока определения промаха разворота, блока фиксации вектора разворота, выход угла разворота блока прогноза вектора разворота связан с соответствующими входами блока определения промаха разворота, блока фиксации вектора разворота, вход ввода вектора разворота блока определения направления разгонного импульса связан с соответствующим выходом блока фиксации вектора разворота, выход блока определения направления разгонного импульса связан с первым векторным входом блока определения направления разворота, вход ввода вектора разворота блока формирования момента управления связан с выходом блока определения направления разворота, выход блока формирования момента управления связан с входами задания управляющего момента блока определения отклонения кинетического момента от расчетного и блока формирования разгонного и тормозного импульсов, выход блока определения кинетического момента связан с информационными входами блока определения отклонения кинетического момента от расчетного, блока определения момента торможения и блока определения направления тормозного импульса, выход блока определения времени разгона связан с параметрическим входом блока определения отклонения кинетического момента от расчетного, выход которого связан с информационным входом блока определения момента свободного вращения, первый выход блока определения момента свободного вращения связан с логическим входом блока определения момента разгона, выход которого связан с входами разрешения разгона блока формирования разгонного и тормозного импульсов, блока логики и блока определения направления разворота, второй выход блока определения момента свободного вращения связан с входом разрешения свободного движения блока логики, выход блока определения момента торможения связан с входом разрешения блока логики, выход которого связан с входами разрешения торможения блока формирования разгонного и тормозного импульсов, блока определения направления тормозного импульса и блока определения направления разворота, выход блока обновления параметров разворота связан с входами задания параметров разворота блока прогноза вектора разворота и блока коррекции параметров разворота, выход которого связан с входом ввода новых параметров разворота блока обновления параметров разворота, управляющий выход блока определения промаха разворота связан с управляющим входом блока обновления параметров разворота, выход прогнозируемого положения блока определения промаха разворота связан с соответствующим входом блока коррекции параметров разворота, выход ошибки разворота блока определения промаха разворота связан с одноименным входом блока сравнения промаха разворота с заданной величиной, выход угла разворота блока фиксации вектора разворота связан с одноименным входом блока определения времени разгона, выход блока определения направления тормозного импульса связан с вторым векторным входом блока определения направления разворота, выход задатчика команды на начало разворота связан с времязадающими входами блока определения момента разгона и блока определения момента свободного вращения, выход блока формирования разгонного и тормозного импульсов является выходом системы, выход задатчика максимальной величины управляющего момента связан с параметрическими входами блока формирования момента управления и блока определения времени разгона, причем блок определения промаха разворота состоит из блока определения наличия вектора разворота, блока моделирования движения аппарата, блока формирования управляющего сигнала, блока фиксации прогнозируемого положения, при этом выход блока определения наличия вектора разворота связан с управляющим входом блока моделирования движения аппарата, выход которого связан с информационными входами блока формирования управляющего сигнала и блока фиксации прогнозируемого положения, вход задания начального положения блока моделирования движения аппарата является одноименным входом блока определения промаха разворота, первый, второй и третий входы задания моментов инерции блока моделирования движения аппарата являются соответствующими входами блока определения промаха разворота, вход ввода угла разворота блока моделирования движения аппарата является одноименным входом блока определения промаха разворота, вход ввода времени разворота блока моделирования движения аппарата является одноименным входом блока определения промаха разворота, установочный вход блока формирования управляющего сигнала является входом задания конечного положения блока определения промаха разворота, управляющий выход блока формирования управляющего сигнала является управляющим выходом блока определения промаха разворота и связан с управляющим входом блока фиксации прогнозируемого положения, выход промаха разворота блока формирования управляющего сигнала связан с информационным входом блока фиксации прогнозируемого положения, выходы которого являются выходами блока определения промаха разворота, отличающаяся тем, что в нее введены блок определения поправки времени разворота, блок коррекции времени разворота, блок определения времени торможения, вычитающее устройство, блок сравнения прогнозируемого времени разворота с заданной величиной, схема логического ИЛИ, при этом выход задатчика времени разворота связан с входами задания времени разворота блока определения поправки времени разворота, блока коррекции времени разворота, блока сравнения прогнозируемого времени разворота с заданной величиной и первым входом вычитающего устройства, выход блока определения кинетического момента связан с информационным входом блока определения времени торможения, управляющий выход блока определения промаха разворота связан с управляющим входом блока определения поправки времени разворота, выход времени окончания маневра блока определения промаха разворота связан с одноименными входами блока сравнения прогнозируемого времени разворота с заданной величиной и блока определения поправки времени разворота, выход которого связан с входами ввода поправки по времени разворота блока определения промаха разворота и блока коррекции времени разворота, выход которого связан с входом ввода времени разворота блока определения времени разгона, выход задатчика максимальной величины управляющего момента связан с параметрическим входом блока определения времени торможения, выход которого связан с вторым входом вычитающего устройства, выход блока определения поправки времени разворота связан с входом ввода времени разворота блока определения промаха разворота, выход вычитающего устройства связан с параметрическим входом блока определения момента свободного вращения, первый вход схемы логического ИЛИ связан с выходом блока сравнения промаха разворота с заданной величиной, второй вход схемы логического ИЛИ связан с выходом блока сравнения прогнозируемого времени разворота с заданной величиной, выход схемы логического ИЛИ связан с логическими входами блока обновления параметров разворота и блока фиксации вектора разворота, а в блок определения промаха разворота введен счетчик времени, причем вход запуска счетчика времени связан с выходом блока определения наличия вектора разворота, вход останова счетчика времени связан с управляющим выходом блока формирования управляющего сигнала, выход счетчика времени является выходом прогнозируемого времени разворота блока определения промаха разворота.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Крутько Д.Д | |||
| Обратные задачи динамики управляемых систем | |||
| - М: Наука, 1988, с.168-178 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ РАЗВОРОТОМ КОСМИЧЕСКОГО АППАРАТА | 1992 |
|
RU2006431C1 |
