Изобретение относится к системам автоматического управления, ориентирующим солнечные панели, и может быть использовано в конструкциях систем автономного энергоснабжения для увеличения выработки электроэнергии солнечными панелями путем их оптимального ориентирования без использования датчиков освещенности.
Известно устройство для автоматической ориентации солнечной батареи, состоящее из неподвижной рамы, блока управления, электромеханического привода в виде линейного актуатора, подвижной треугольной рамы, установленной на неподвижной раме на вертикальных регулируемых по высоте, стойках с фиксирующими отверстиями, которые закреплены в бетонных сваях, при помощи шарнира в верхней части конструкции и подшипника качения в основании конструкции, выполненная в виде треугольника, на которой установлены солнечные батареи, а также двух фоторезисторов, электрически соединенных с блоком управления приводом подвижной рамы (см. патент РФ №180901, 2017 г.).
Основными недостатками данного устройства является наличие датчиков освещенности (фоторезисторов), что уменьшает надежность конструкции и ведет к возможным ошибкам ориентирования панелей ввиду засветки или загрязнения датчиков, небольшой диапазон перемещения рамы ввиду использования линейного актуатора, а также необходимость ручной настройки высоты панелей.
Наиболее близким к заявляемому изобретению по технической сущности и достигаемому техническому результату и принятым авторами за прототип является устройство ориентирования солнечных батарей, содержащее подвижную раму, на которой установлены солнечные батареи, снабженную системой поворота рамы, а также систему автоматического регулирования, содержащую электромеханические приводы, блок управления на основе микроконтроллера и модуль обратной связи, при этом система поворота рамы выполнена в виде вертикального вала, на котором установлена рама, и горизонтального вала, установленного между рамой и вертикальным валом, при этом валы установлены с возможностью вращения вокруг оси и приводятся в движение электромеханическими приводами, выполненными в виде электродвигателей постоянного тока с понижающим редуктором, модуль обратной связи содержит датчики напряжения и тока, подключенные к выходу солнечной батареи, а также датчики положения вертикального и горизонтального валов и подключен к центральному микроконтроллеру, который при помощи датчиков напряжения и тока определяет величину вырабатываемой солнечной батареей мощности, определяет положение солнечной батареи с максимальной вырабатываемой мощностью и выдает команду на поворот солнечной батареи через силовой модуль, содержащий транзисторные или релейные ключи, включающие электродвигатели электроприводов вертикального и горизонтального валов (см. патент РФ 2723786, 2019 г.).
Описанное устройство производит обход нескольких точек в заданной окрестности от начального положения. В каждой точке измеряется вырабатываемая солнечной батареей мощность, затем выполняется возврат к точке с наибольшей мощностью. Положение рамы с солнечными батареями при этом предлагается измерять при помощи потенциометров либо гироскопа.
Основными недостатками прототипа является снижение надежности системы ввиду использования потенциометров и приводов постоянного тока, а также невысокая точность позиционирования солнечных батарей как при определении позиции рамы при помощи потенциометров (варьирование параметров и их зависимость от внешних условий), так и при определении ее при помощи гироскопа (необходимость интегрирования низких значений скорости в блоке управления). Кроме того, обход нескольких точек и возврат к точке с наибольшей измеренной мощностью ведет к увеличению потерь энергии.
Заявляемое изобретение решает задачу создания устройства, имеющего повышенную надежность и энергоэффективность при автоматическом ориентировании солнечных панелей.
Технический результат заключается в снижении затрат энергии при выполнении поворота солнечных панелей в оптимальное положение и повышении автономности устройства, благодаря увеличению его надежности.
Технический результат достигается тем, что устройство ориентирования солнечных панелей, содержащее подвижную раму, на которой установлены солнечные панели, снабженную системой поворота рамы в виде вертикального вала и горизонтального вала, установленного между рамой и вертикальным валом, приводимых в движение электромеханическими приводами, и осуществляет ориентирование панелей с помощью системы автоматического регулирования, содержащей блок управления с датчиками напряжения и тока, подключенными к выходу солнечной панели для нахождения вырабатываемой мощности и определения положения с максимальной вырабатываемой мощностью, и силовым модулем для управления электромеханическими приводами, при этом для привода двух осей ориентирования применены бесколлекторные электродвигатели с червячными редукторами, а положение панелей определяется при условии проведения начальной калибровки по датчикам конечных положений из подсчета количества дискретных шагов перемещения панелей без их обратного движения.
Устройство отличается также тем, что в качестве датчика положения панелей может быть применен магнитометр, закрепленный на раме.
Устройство отличается также тем, что в представленной конструкции используется только одна азимутальная ось ориентирования, а угол высоты Солнца фиксирован и является оптимальным для местности установки устройства.
Повышение энергоэффективности происходит за счет исключения обратного перемещения рамы с солнечными панелями ввиду того, что после проведения начальной калибровки рама перемещается с определенным шагом в направлении увеличения вырабатываемой панелями мощности и останавливается, как только измеренная мощность начнет уменьшаться. Последующее перемещение запускается через фиксированный интервал времени.
Увеличение надежности устройства происходит вследствие применения бесколлекторных электродвигателей и отсутствия датчиков освещенности и положения валов, либо применения вместо датчиков положения валов датчика магнитометра, закрепленного на раме.
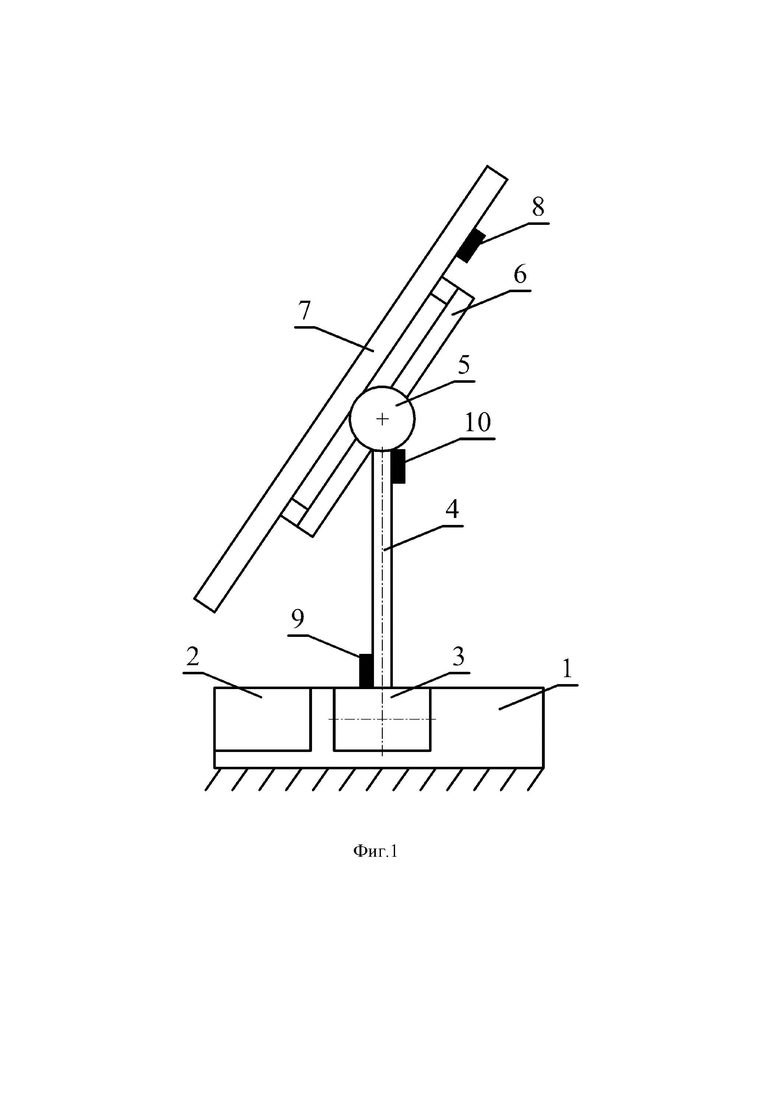
Устройство ориентирования солнечных панелей показано на чертеже и содержит неподвижное основание 1, в котором располагается блок управления 2 и редукторный привод вертикальной оси 3 для ориентирования солнечных панелей по азимуту. Установленный на редукторе вертикальный вал 4 представляет из себя несущий столб, в верхней части которого закреплен редукторный привод горизонтальной оси 5 для ориентирования солнечных панелей по высоте Солнца и связанная с приводом 5 рама 6, где устанавливаются солнечные панели 7. Для определения положения панелей на раме может устанавливаться магнетометр 8, а для проведения начальной калибровки по двум осям ориентирования установлены датчики конечного положения 9, 10.
Устройство работает следующим образом. При первом запуске системы или при подаче соответствующей команды запускается процедура начальной калибровки: на приводы осей ориентирования 3, 5 подаются команды от блока управления 2 на поворот установленной на неподвижном основании 1 и несущем столбе 4 рамы 6 с панелями 7 до положений «закат» и «верх» и затем до положений «восход» и «низ», определяемые по датчикам конечного положения 9, 10. Далее производится процедура поиска Солнца: в блоке управления 2 измеряется при помощи датчиков тока и напряжения и запоминается вырабатываемая мощность солнечных панелей 7, затем от блока управления 2 поочередно на приводы 3, 5 подается команды на перемещение из начальных положений «восход» и «низ» на один шаг, измеряется вырабатываемая мощность солнечных панелей 7 в блоке управления 2 и принимается решение о дальнейшем движении независимо для каждой оси - если мощность увеличилась, производится поворот еще на один шаг, если уменьшилась или осталась неизменной - система переходит в режим слежения. Когда Солнце найдено, система переходит в цикл слежения: спустя фиксированный промежуток времени, различный для двух осей ориентирования, от блока управления 2 поступает команда на привод 3 или 5 на поворот на один шаг, измеряется вырабатываемая мощность панелей 7 в блоке управления 2 и принимается решение о дальнейшем движении аналогично режиму поиска Солнца. Цикл слежения повторяется до тех пор, пока рама с панелями не достигнет конечного положения «закат», определяемого по датчику 9, или не будет достигнут минимальный порог вырабатываемой мощности. При достижении минимального порога вырабатываемой мощности система продолжит движение после увеличенного интервала времени до положения «закат», и в случае превышения минимального порога вырабатываемой мощности вернется в режим слежения. При достижении положения «закат» система перейдет в режим ночи: от блока управления 2 поступает команда на привод 3 на перемещение в положение «восход», система ожидает появления Солнца, что определяется по изменению вырабатываемой панелями 7 мощности блоком управления 2, однако этот интервал времени не может быть меньше заданного времени ночи; при этом привод ориентирования по высоте Солнца 5 остается в прежнем положении до восхода, а при начале движения рамы занимает положение, определенное при начальной калибровке.
При наличии магнитометра 8 в блок управления 2 поступает также сигнал о текущей ориентации панелей по сторонам света, что позволяет контролировать работу приводов осей 3, 5.
При использовании только одной вертикальной оси устройства режимы работы аналогичны описанным, за тем лишь исключением, что горизонтальная ось фиксирована, и привод 5 с датчиком конечного положения 10 отсутствуют.
Предлагаемое устройство позволяет повысить эффективность выработки электроэнергии солнечными панелями путем их оптимального ориентирования без обратного движения панелей, а также увеличить надежность устройства, благодаря отказу от датчиков положения осей и применению только датчиков конечных положений или магнетометра в совокупности с использованием бесколлекторных электродвигателей для приводов осей.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОРИЕНТИРОВАНИЯ СОЛНЕЧНОЙ БАТАРЕИ | 2019 |
|
RU2723786C1 |
| Устройство для автоматической ориентации солнечной батареи | 2023 |
|
RU2811399C1 |
| СОЛНЕЧНАЯ ФОТОЭЛЕКТРИЧЕСКАЯ СТАНЦИЯ И СПОСОБ ЕЕ ОРИЕНТАЦИИ | 2021 |
|
RU2764866C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПЛАТФОРМОЙ КОНЦЕНТРАТОРНЫХ СОЛНЕЧНЫХ МОДУЛЕЙ | 2015 |
|
RU2611571C1 |
| СОЛНЕЧНАЯ ЭЛЕКТРОСТАНЦИЯ | 2013 |
|
RU2560652C2 |
| ПОРТАТИВНАЯ СОЛНЕЧНАЯ ЭЛЕКТРОСТАНЦИЯ | 2013 |
|
RU2560653C2 |
| УСТАНОВКА АВТОМАТИЧЕСКОГО СЛЕЖЕНИЯ ПРИЕМНОЙ ПАНЕЛИ ЗА СОЛНЦЕМ | 2011 |
|
RU2482401C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА И СОЛНЕЧНОЙ БАТАРЕИ ПРИ ОТКАЗЕ УСТРОЙСТВА ПОВОРОТА СОЛНЕЧНОЙ БАТАРЕИ | 2014 |
|
RU2581106C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ МАКСИМАЛЬНОЙ ВЫХОДНОЙ МОЩНОСТИ СОЛНЕЧНЫХ БАТАРЕЙ КОСМИЧЕСКОГО АППАРАТА | 2007 |
|
RU2354591C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАКСИМАЛЬНОЙ ВЫХОДНОЙ МОЩНОСТИ СОЛНЕЧНЫХ БАТАРЕЙ КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2354592C2 |
Изобретение относится к системам автоматического управления, ориентирующим солнечные панели, и может быть использовано в конструкциях систем автономного энергоснабжения для увеличения выработки электроэнергии солнечными панелями путем их оптимального ориентирования без использования датчиков освещенности. Устройство ориентирования солнечных панелей содержит подвижную раму, на которой установлены солнечные панели, снабженную системой поворота рамы в виде вертикального вала и горизонтального вала, установленного между рамой и вертикальным валом, приводимых в движение электромеханическими приводами, а также систему автоматического регулирования, содержащую блок управления с датчиками напряжения и тока, подключенными к выходу солнечной панели для нахождения вырабатываемой мощности и определения положения с максимальной вырабатываемой мощностью, и силовым модулем для управления электромеханическими приводами. Для привода двух валов применены бесколлекторные электродвигатели с червячными редукторами. Положение солнечных панелей определяется при условии проведения начальной калибровки по датчикам конечных положений из подсчета количества дискретных шагов перемещения солнечных панелей без их обратного движения. После проведения начальной калибровки блок управления выполнен с возможностью измерения при помощи датчиков тока и напряжения и запоминания вырабатываемой солнечными панелями мощности, поочередной передачи на приводы валов команд на перемещение на один шаг, измерения вырабатываемой солнечными панелями мощности и принятия решения о дальнейшем движении независимо для каждого вала – если мощность увеличилась, блок управления передает команду на привод вала на перемещение еще на один шаг, если мощность уменьшилась или осталась неизменной – рама останавливается, с запуском последующего перемещения на один шаг через промежуток времени, различный для двух валов. Технический результат заключается в снижении затрат энергии при выполнении поворота солнечных панелей в оптимальное положение и повышении автономности устройства, благодаря увеличению его надежности. 1 з.п. ф-лы, 1 ил.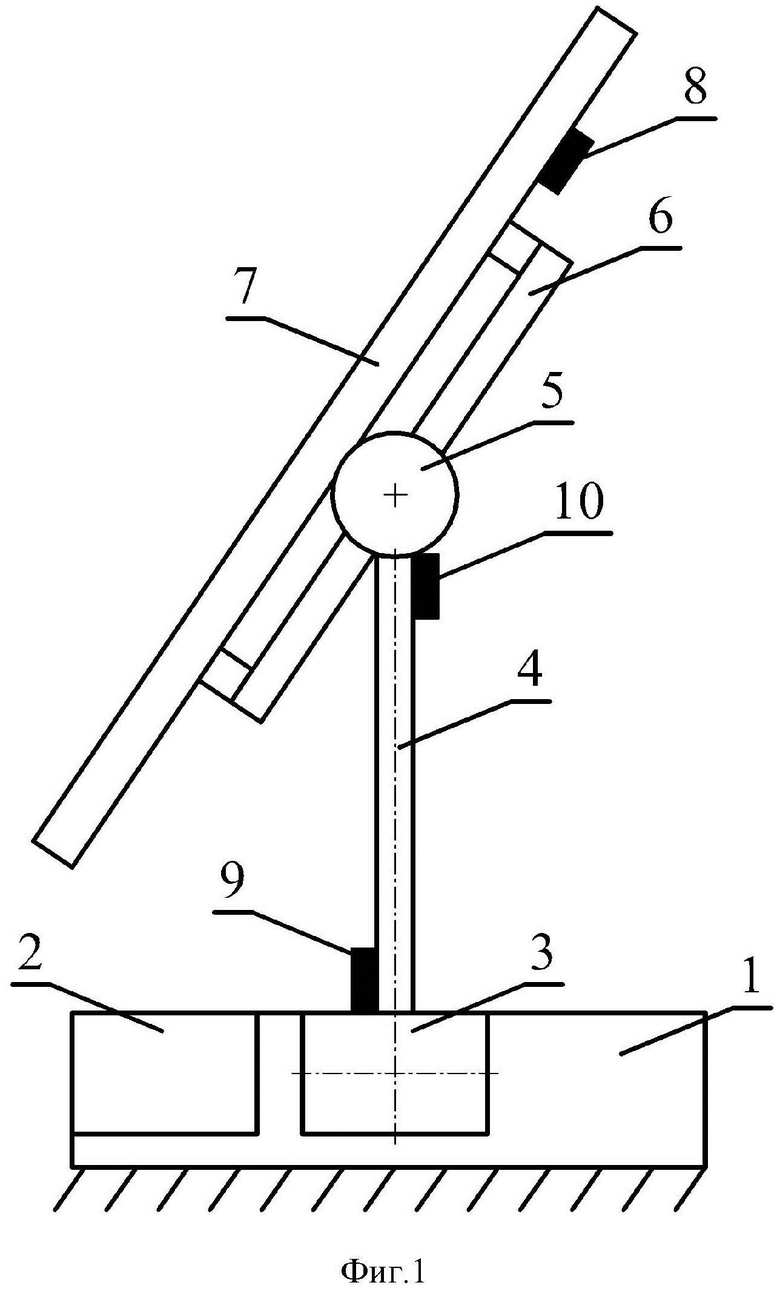
1. Устройство ориентирования солнечных панелей, содержащее подвижную раму, на которой установлены солнечные панели, снабженную системой поворота рамы в виде вертикального вала и горизонтального вала, установленного между рамой и вертикальным валом, приводимых в движение электромеханическими приводами, а также систему автоматического регулирования, содержащую блок управления с датчиками напряжения и тока, подключенными к выходу солнечной панели для нахождения вырабатываемой мощности и определения положения с максимальной вырабатываемой мощностью, и силовым модулем для управления электромеханическими приводами, отличающееся тем, что для привода двух валов применены бесколлекторные электродвигатели с червячными редукторами, а положение солнечных панелей определяется при условии проведения начальной калибровки по датчикам конечных положений из подсчета количества дискретных шагов перемещения солнечных панелей без их обратного движения, при этом после проведения начальной калибровки блок управления выполнен с возможностью измерения при помощи датчиков тока и напряжения и запоминания вырабатываемой солнечными панелями мощности, поочередной передачи на приводы валов команд на перемещение на один шаг, измерения вырабатываемой солнечными панелями мощности и принятия решения о дальнейшем движении независимо для каждого вала – если мощность увеличилась, блок управления передает команду на привод вала на перемещение еще на один шаг, если мощность уменьшилась или осталась неизменной – рама останавливается, с запуском последующего перемещения на один шаг через промежуток времени, различный для двух валов.
2. Устройство ориентирования солнечных панелей по п. 1, отличающееся тем, что текущее положение панелей определяется при помощи магнитометра.
| УСТРОЙСТВО ОРИЕНТИРОВАНИЯ СОЛНЕЧНОЙ БАТАРЕИ | 2019 |
|
RU2723786C1 |
| МОЛОТИЛЬНОЕ УСТРОЙСТВО | 0 |
|
SU180901A1 |
| ПРИБОР ДЛЯ ИЗМЕРЕНИЯ ОТКЛОНЕНИЙ ОТ КРУГЛОСТИ ТЕЛ ВРАЩЕНИЯ | 1966 |
|
SU216282A1 |
| СОЛНЕЧНАЯ ФОТОЭНЕРГОУСТАНОВКА | 2021 |
|
RU2767718C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПЛАТФОРМОЙ КОНЦЕНТРАТОРНЫХ СОЛНЕЧНЫХ МОДУЛЕЙ | 2015 |
|
RU2611571C1 |
| CN 101881973 A, 10.11.2010 | |||
| CN 104521698 A, 22.04.2015. | |||
