Изобретение относится к области космической техники, а именно к системам электроснабжения (СЭС) космических аппаратов (КА), и может быть использовано при эксплуатации солнечных батарей (СБ) СЭС КА.
Основной электрической характеристикой СБ является максимальная выходная мощность СБ (эта мощность отличается от текущей действительной выходной мощности, которая зависит от нагрузки и от влияния окружающей среды). На стадии проектирования и изготовления СБ (до запуска КА) осуществляется теоретический расчет рабочих характеристик СБ, который называют также расчетом выходных параметров СБ (см. [1]; см. [2], стр.49). Теоретический расчет рабочих характеристик СБ и прогнозирование процесса их деградации под действием факторов космического полета осуществляется с помощью ЭВМ, при этом расчет выходных параметров СБ основан на методе перемещений вольт-амперной характеристики, учитывающем различные влияния окружающей среды и параметров нагрузки на характеристики СБ (см. [2], стр.54).
Недостаток указанного способа определения максимальной выходной мощности СБ заключается в том, что используемые в расчетах модели факторов космического полета имеют ограниченную точность, что не позволяет получить достоверные данные о реальных характеристиках СБ в полете.
Для контроля фактических характеристик СБ в полете проводятся специальные полетные операции - сеансы оценки эффективности СБ, в которых осуществляется измерение фактической максимальной выходной мощности СБ. По результатам определения максимальной выходной мощности СБ оценивается текущая эффективность СБ как отношение измеренной максимальной выходной мощности СБ к ее номинальному значению - проектному или некоторому исходному значению (например, на момент начала функционирования КА).
Для определения выходной мощности СБ может быть использована система, представленная в [2], стр.48, реализующая модель солнечного элемента, соединенного с нагрузкой, и содержащая солнечный элемент, соединенный с блоком идеального ваттметра, соединенным с нагрузкой. При этом блок идеального ваттметра содержит датчики тока (амперметр) и напряжения (вольтметр) и вычислитель, реализующий определение выходной мощности Р солнечного элемента по формуле:

где I - измеренное значение тока от солнечно элемента;
V - измеренное напряжение.
Наиболее близким из аналогов, принятым за прототип, является способ определения максимальной выходной мощности СБ КА, описанный в [3], стр.17-18. Суть способа заключается в следующем. Для определения максимальной выходной мощности СБ используют измеряемое значение максимального тока от СБ Im - тока, вырабатываемого при ориентации освещенной рабочей поверхности панелей СБ перпендикулярно солнечным лучам. Для этого панели СБ разворачивают в положение, соответствующее совмещению нормали к рабочей поверхности панелей СБ с направлением на Солнце. Такая ориентация СБ обеспечивает максимальный приход электроэнергии от СБ.
Система для реализации способа, принятого за прототип, описана в [3], стр.6, и содержит СБ, на жесткой подложке корпуса которой расположен блок фотоэлектрических батарей (БФБ), устройство поворота СБ (УПСБ), усилительно-преобразующее устройство (УПУ), блок управления ориентацией СБ по направлению на Солнце (БУОСБС), блок регуляторов тока (БРТ), датчик тока (ДТ), блок определения мощности (БОМ), блок управления системой энергоснабжения (БУСЭС) и шину электроснабжения (ШЭ). При этом выход БФБ, расположенного на СБ, соединен с БРТ, выход которого соединен с ШЭ, а БОМ подключен своими первым и вторым входами к, соответственно, ШЭ и ДТ, подключенному, в свою очередь, к ШЭ, причем выход БУСЭС подключен к входу БУОСБС, выход которого соединен входом УПУ, выход которого соединен с входом УПСБ, выход которого соединен со вторым входом БУОСБС, причем УПСБ механически соединено с СБ. При этом в описании системы-прототипа и ее блок-схемы (см. [3], стр.6-8) функция БОМ реализуется при функционировании блока зарядного устройства СЭС.
Система работает следующим образом.
По команде с БУСЭС (9) блок БУОСБС (5) осуществляет управление ориентацией СБ (1) на Солнце. Входной информацией для алгоритма управления СБ (1) являются: положение единичного вектора направления на Солнце относительно связанных с КА осей координат; положение СБ относительно корпуса КА, получаемое в виде текущих измеренных значений угла α между текущим положением нормали к рабочей поверхности СБ и направлением на Солнце с датчиков угла (ДУ), установленных на УПСБ (3). При ориентации СБ на Солнце α≈0. Выходной информацией алгоритма управления являются команды на вращение СБ относительно оси выходного вала УПСБ (3) и команды на прекращение вращения, а ДУ УПСБ (3) выдают сигналы о текущем положении СБ (1).
УПУ (4) играет роль интерфейса между БУОСБС (5) и УПСБ (3).
Электроэнергия от БФБ (2), установленных на СБ (1), через БРТ (6) поступает на шину питания СЭС ШЭ (10). ДТ (7) измеряет текущий ток на ШЭ (10) и измеренное значение тока поступает на БОМ (8), в котором осуществляется измерение напряжения на ШЭ (10) и по соотношению (1) рассчитывается значение выходной мощности СБ.
Известно (см. [2], стр.10-15), что эффективность работы солнечных элементов зависит от их температуры. При этом анализ выходных параметров СБ (см. [2], стр.49-51) включает анализ работы СБ во всем диапазоне температур - как при рабочей температуре, так и с учетом температуры при затемнении и неосвещенной СБ.
Способ и система, принятые за прототип, имеют существенный недостаток - они не позволяют учесть температурный режим СБ при определении максимальной выходной мощности СБ и оценке их эффективности.
Задачей, стоящей перед предлагаемым изобретением, является увеличение точности определения максимальной выходной мощности СБ за счет учета температурного режима СБ, а именно, обеспечения определения максимальной выходной мощности СБ как при максимальной установившейся рабочей температуре, так и при минимальной температуре СБ.
Технический результат достигается тем, что в способе определения максимальной выходной мощности солнечных батарей космического аппарата, включающем разворот панелей солнечных батарей в рабочее положение, соответствующее совмещению нормали к их освещенной рабочей поверхности с направлением на Солнце, измерение значения тока от солнечных батарей, измерение напряжения и определение максимальной выходной мощности солнечных батарей космического аппарата как произведение измеренных значений напряжения и тока от солнечных батарей, дополнительно измеряют высоту орбиты космического аппарата и определяют по ней значения углового полураствора видимого с космического аппарата диска Земли (Qz) и угла возвышения верхней границы атмосферы над видимым с космического аппарата горизонтом Земли (ε), определяют значение углового полураствора видимого с космического аппарата диска Солнца (Qs), измеряют угловую скорость орбитального движения космического аппарата (ω), измеряют угол между направлением на Солнце и плоскостью орбиты космического аппарата (β), на витках, на которых значение измеряемого угла β менее или равно значению β°, определяемому по формуле
β°=arccos(cos Qz/cos (Δt°ω/2)},
где Δt° - требуемая минимально допустимая продолжительность теневого участка витка орбиты,
измеряют угол возвышения направления на Солнце над видимым с космического аппарата горизонтом Земли (g) и максимальную выходную мощность солнечных батарей при их минимальной температуре определяют как произведение значений напряжения и тока от солнечных батарей, измеренных в момент касания видимым с космического аппарата диском Солнца верхней границы атмосферы Земли на восходе Солнца, определяемый из условия равенства значения измеряемого угла g сумме значений углов ε и Qs при возрастании значения угла g, а максимальную выходную мощность солнечных батарей при максимальной установившейся рабочей температуре определяют как произведение значений напряжения и тока от солнечных батарей, измеренных в момент касания видимым с космического аппарата диском Солнца верхней границы атмосферы Земли на заходе Солнца, определяемый из условия равенства значения измеряемого угла g сумме значений углов ε и Qs при убывании значения угла g.
При этом, поставленная задача решается тем, что в систему определения максимальной выходной мощности солнечных батарей космического аппарата, включающую солнечную батарею с блоком установленных на ней фотоэлектрических батарей, устройство поворота солнечных батарей, усилительно-преобразующее устройство, блок управления ориентацией солнечных батарей по направлению на Солнце, блок регуляторов тока, датчик тока, блок определения мощности, блок управления системой электроснабжения и шину электроснабжения, при этом выход блока фотоэлектрических батарей соединен со входом блока регуляторов тока, выход которого соединен с шиной электроснабжения, к которой подключены датчик тока и блок определения мощности, а выход блока управления системой электроснабжения соединен с первым входом блока управления ориентацией солнечных батарей по направлению на Солнце, выход которого соединен с входом усилительно-преобразующего устройства, выход которого соединен с входом устройства поворота солнечных батарей, выход которого соединен со вторым входом блока управления ориентацией солнечных батарей по направлению на Солнце, причем устройство поворота солнечных батарей механически соединено с солнечной батареей, дополнительно введены блок измерения угла между направлением на Солнце и плоскостью орбиты космического аппарата, блок измерения угла возвышения направления на Солнце над видимым с космического аппарата горизонтом Земли, блок измерения угловой скорости орбитального движения космического аппарата, блок измерения высоты орбиты космического аппарата, блок определения угла возвышения верхней границы атмосферы Земли над видимым с космического аппарата горизонтом Земли, блок определения угла полураствора видимого с космического аппарата диска Солнца, блок определения витка выполнения операции определения максимальной выходной мощности солнечных батарей, блок определения моментов определения максимальной выходной мощности солнечных батарей, блок формирования идентификационных параметров температурных режимов солнечных батарей и ключ, при этом второй вход блока определения мощности соединен с выходом ключа, информационный и управляющий входы которого соединены с выходами, соответственно, датчика тока и блока определения моментов определения максимальной выходной мощности солнечных батарей, с первого по четвертый входы которого соединены с выходами, соответственно, блока измерения угла возвышения направления на Солнце над видимым с космического аппарата горизонтом Земли, блока определения угла полураствора видимого с космического аппарата диска Солнца, блока определения угла возвышения верхней границы атмосферы Земли над видимым с космического аппарата горизонтом Земли и блока определения витка выполнения операции определения максимальной выходной мощности солнечных батарей, первый, второй и третий входы которого соединены с выходами, соответственно, блока измерения угла между направлением на Солнце и плоскостью орбиты космического аппарата, блока измерения угловой скорости орбитального движения космического аппарата и блока измерения высоты орбиты космического аппарата, выход которого соединен также с входом блока определения угла возвышения верхней границы атмосферы Земли над видимым с космического аппарата горизонтом Земли, а выход блока измерения угла возвышения направления на Солнце над видимым с космического аппарата горизонтом Земли также соединен с входом блока формирования идентификационных параметров температурных режимов солнечных батарей, выход которого соединен с третьим входом блока определения мощности.
Суть предлагаемого изобретения поясняется чертежами, на которых представлено: на фиг.1 - схема освещения СБ при заходе и восходе Солнца; на фиг.2 - схема освещения витка орбиты КА Солнцем; на фиг.3 - блок-схема системы для осуществления предлагаемого способа; на фиг.4 - график прихода электроэнергии от СБ российского сегмента (PC) международной космической станции (МКС).
Поясним предложенные в способе действия.
Равновесная рабочая температура СБ (Траб) и температура неосвещенной СБ (Тт) определяются термомеханическими и электрическими свойствами СБ и, например, могут быть рассчитаны по соотношениям, представленным в [2], стр.90. Температура СБ при попадании ее в тень зависит от времени затемнения, но если период тени длится более определенного времени (в [2], стр.96, приведена оценка данного времени 30 мин), то температура неосвещенной СБ практически не зависит от Траб, т.е. в конце тени достигается минимальная температура СБ в полете. При этом равновесная рабочая температура в установившемся режиме работы СБ является максимальной температурой СБ в полете.
В полете КА данные минимальная и максимальная температуры гарантированно достигаются, соответственно, к моменту окончания теневого участка орбиты (при условии, что его продолжительность не менее требуемой величины) и к моменту выхода на установившийся температурный режим работы СБ на освещенном участке орбиты. Данный режим устанавливается через определенное время после выхода КА на свет (например, 15-20 мин для СБ PC МКС), естественно, при очевидном условии, что СБ КА ориентированы на Солнце и не затенены от Солнца элементами конструкции КА. Таким образом, принимается, что к концу освещенного участка орбиты КА СБ, находящиеся в рабочем положении - ориентированные на Солнце и освещенные Солнцем (не затененные элементами конструкции КА), гарантированно выходят на установившийся температурный режим работы.
Наряду с этим известно (см. [2], стр.272), что солнечное излучение, поступающее к Земле, отражается от ее поверхности, от облаков, рассеивается атмосферой. Энергия отраженного излучения, сосредоточенная в спектральном диапазоне области чувствительности солнечных элементов СБ, воспринимается СБ и увеличивает их выходную мощность. Таким образом, кроме прямого солнечного излучения на СБ попадает поток отраженного от Земли излучения, что вносит неопределенность в определение максимальной выходной мощности СБ и в последующее решение задачи оценки их эффективности. Неопределенность при этом заключается в наличии не прогнозируемого и не подлежащего учету завышения получаемых значений выходной мощности СБ.
Однако в моменты начала и конца освещенного участка орбиты КА направление потока солнечного излучения, поступающего на КА, проходит по касательной к поверхности Земли - в этом случае отраженного от Земли излучения, поступающего на СБ КА, не возникает кроме излучения от лимба, образованного подсвеченной Солнцем атмосферой Земли, влияние которого на генерацию электроэнергии СБ пренебрежительно мало в сравнении с поступающим на СБ прямым излучением от Солнца. Это, в частности, иллюстрируется графиком, представленным на фиг.4, - в момент захода Солнца (при работе СБ в установившемся температурном режиме) повышения прихода электроэнергии на СБ не происходит.
Таким образом, в конце освещенного участка орбиты КА достигается выход на установившийся температурный режим работы СБ и, одновременно, отсутствует непрогнозируемое и не подлежащее учету завышение значений выходной мощности СБ от возможного попадания отраженного от Земли излучения на СБ (т.е. отсутствует негативное влияние отраженного от Земли излучения на операцию определения максимальной выходной мощности СБ).
В предлагаемом техническом решении при определении максимальной выходной мощности СБ выполняется определение выходной мощности СБ в максимально возможном диапазоне температур СБ - при минимальной температуре в начале освещенного участка орбиты и при максимальной установившейся рабочей температуре в конце освещенного участка орбиты.
На фиг.1, поясняющей схему освещения СБ при заходе и восходе Солнца, построение выполнено в плоскости, образованной радиус-вектором КА и направлением на Солнце, и введены обозначения:
Р - СБ КА;
N - нормаль к рабочей поверхности панелей СБ;
С - центр видимого с КА диска Солнца;
S, PC - вектора направления от КА на центр диска Солнца;
Z - Земля;
О - центр Земли;
D - поверхность Земли;
G - верхняя граница атмосферы Земли;
Натм - высота верхней границы атмосферы Земли от поверхности Земли;
Qz - угол полураствора видимого с КА диска Земли;
Rz - радиус Земли;
Норб - высота орбиты КА;
g - угол возвышения направления на Солнце над видимым с КА горизонтом Земли;
ε - угол возвышения верхней границы атмосферы Земли над видимым с КА горизонтом Земли;
Qs - угол полураствора видимого с КА диска Солнца.
Рассматриваем текущую ориентацию СБ, при которой нормаль к рабочей поверхности панелей СБ N совмещена с направлением на Солнце S.
После выхода КА на свет наиболее ранний момент времени (t1), когда КА будет освещен полным диском Солнца (без «затенения» части видимого с КА солнечного диска атмосферой Земли), соответствует выполнению условия (см. фиг.1):

Этим же условием определяется и наиболее поздний момент времени (t2) на освещенной части витка орбиты, когда КА освещен излучением от полного солнечного диска. При превышении углом g данного значения (между моментами времени t1 и t2) уже начинает негативно проявляться эффект дополнительного поступления на СБ КА отраженного от Земли излучения.
Слой атмосферы Земли, который рассеивает поступающее на КА излучение от Солнца, задается высотой своей верхней границы от поверхности Земли Натм (см. [7], стр.19-20, стр.128-160). Определение угла ε осуществляется по следующей формуле:

где

Определение угла Qs осуществляется по методике, используемой при расчете таблиц видимого радиуса Солнца Астрономического ежегодника (см. [8], стр.624).
На фиг.2, представляющей схему освещения витка орбиты КА Солнцем, дополнительно обозначено:
Nорб - нормаль к плоскости орбиты КА;
V - вектор скорости КА;
β - угол между направлением на Солнце и плоскостью орбиты КА;
Тв, Тз - положения КА в моменты, соответственно, восхода и захода Солнца tв и tз (в моменты начала и конца освещенного участка орбиты);
Тт и Тс - положения КА в моменты середины теневого участка и середины освещенного участка орбиты;
ТвК - проекция направления на Солнце на плоскость орбиты КА;
γ - угол между направлениями ТвО и TвK;
T1, Т2 - положения КА в моменты времени, соответственно, t1 и t2.
Продолжительность теневого участка орбиты Δt:

определяется из равенства углов ТтОТв, ТтОТз, ОТвК и из соотношения, получаемого как решение прямоугольного сферического треугольника, образованного направлениями ТвС, ТвО, ТвК, в котором угол СТвК=β, угол CTвO=Qz, угол ОТвК=γ:




где ω - угловая скорость орбитального движения КА.
Условие длительности тени не менее заданного значения Δt°:

определяется выполнением соотношения:




Таким образом, условие (10) выполняется только на витках, на которых значение угла β ограничено сверху максимально допустимым значением β°:


При этом максимально возможное значение Δt°, реализуемое для конкретного КА, задается соотношением

Для реализации способа предлагается система, представленная на фиг.3 и содержащая следующие блоки:
1 - СБ; 2 - БФБ; 3 - УПСБ; 4 - УПУ; 5 - БУОСБС; 6 - БРТ; 7 - ДТ; 8 - БОМ; 9 - БУСЭС; 10 - ШЭ;
11 - блок измерения угла между направлением на Солнце и плоскостью орбиты космического аппарата (БИУСПОКА),
12 - блок определения витка выполнения операции определения максимальной выходной мощности солнечных батарей (БОВОМВМСБ);
13 - блок измерения угла возвышения направления на Солнце над видимым с космического аппарата горизонтом Земли (БИУВСГЗ);
14 - блок определения моментов определения максимальной выходной мощности солнечных батарей (БОМОМВМСБ);
15 - блок измерения угловой скорости орбитального движения космического аппарата (БИУСОДКА);
16 - блок измерения высоты орбиты космического аппарата (БИВОКА);
17 - блок определения угла возвышения верхней границы атмосферы Земли над видимым с КА горизонтом Земли (БОУВВГАГЗ).
18 - блок определения угла полураствора видимого с КА диска Солнца (БОУПДС);
19 - блок формирования идентификационных параметров температурных режимов солнечных батарей (БФИПТРСБ);
20 - ключ,
при этом выход БФБ (2), расположенного на СБ (1), соединен с БРТ (6), выход которого соединен с ШЭ (10), к которой подключены ДТ (7) и БОМ (8), второй вход которого соединен с выходом ключа (20). Информационный и управляющий входы ключа (20) соединены с выходами, соответственно, ДТ (7) и БОМОМВМСБ (14). С первого по четвертый входы БОМОМВМСБ (14) соединены с выходами, соответственно, БИУВСГЗ (13), БОУПДС (18), БОУВВГАГЗ (17) и БОВОМВМСБ (12). Первый, второй и третий входы БОВОМВМСБ (12) соединены с выходами, соответственно, БИУСПОКА (11), БИУСОДКА (15) и БИВОКА (16). Выход БИВОКА (16) также соединен с входом БОУВВГАГЗ (17). Выход БИУВСГЗ (13) также соединен с входом БФИПТРСБ (19), выход которого соединен с третьим входом БОМ (8). Выход БУСЭС (9) подключен к входу БУОСБС (5), выход которого соединен входом УПУ (4), выход которого соединен с входом УПСБ (3), выход которого соединен со вторым входом БУОСБС (5). УПСБ (3) механически соединено с СБ (1).
На фиг.3 пунктиром показана механическая связь УПСБ (3) с корпусом СБ (1) через выходной вал привода СБ.
Система работает следующим образом.
По команде с БУСЭС (9) блок БУОСБС (5) осуществляет управление ориентацией СБ (1) на Солнце. Входной информацией для алгоритма управления СБ (1) являются: положение единичного вектора направления на Солнце относительно связанных с КА осей координат; положение СБ относительно корпуса КА, получаемое в виде текущих измеренных значений угла α между текущим положением нормали к рабочей поверхности СБ и направлением на Солнце с датчиков угла (ДУ), установленных на УПСБ (3). При ориентации СБ на Солнце α≈0. Выходной информацией алгоритма управления являются команды на вращение СБ относительно оси выходного вала УПСБ (3) и команды на прекращение вращения, а ДУ УПСБ (3) выдают сигналы о текущем положении СБ (1).
УПУ (4) играет роль интерфейса между БУОСБС (5) и УПСБ (3).
Электроэнергия от БФБ (2), установленных на СБ (1), через БРТ (6) поступает на шину питания СЭС ШЭ (10). ДТ (7) измеряет текущий ток на ШЭ (10) и измеренное значение тока поступает на информационный вход ключа (20). В исходном состоянии ключ (20) «закрыт».
В БИУСПОКА (11) определяется угол между направлением на Солнце и плоскостью орбиты КА β. В БИУСОДКА (15) осуществляется измерение угловой скорости орбитального движения КА ω. В БИВОКА (16) выполняется измерение высоты орбиты КА Норб. Полученные значения передаются в БОВОМВМСБ (12).
В БОВОМВМСБ (12) по соотношению (4) определяется значение угла Qz, по соотношению (16) определяется значение β° и проверкой условия (15) определяется возможность выполнения операции по определению максимальной выходной мощности СБ на текущем витке орбиты КА. При выполнении условия (15) БОВОМВМСБ (12) генерирует сигнал, поступающий на вход БОМОМВМСБ (14).
При этом в БИУВСГЗ (13) определяется текущий угол возвышения Солнца над видимым с КА горизонтом Земли g. Измеренное значение высоты орбиты от БИВОКА (16) также передается в БОУВВГАГЗ (17), в котором по соотношениям (3), (4) определяется значение угла ε. В БОУПДС (18) выполняется определение угла полураствора видимого с КА диска Солнца Qs. Данные значения поступают в БОМОМВМСБ (14).
По поступлении управляющего сигнала от БОВОМВМСБ (12) БОМОМВМСБ (14) проверкой условия (2) определяет моменты t1 и t2, в которые будут выполняться измерения текущего тока от СБ для определения максимальной выходной мощности СБ при разных температурных режимах функционирования СБ. При выполнении условия (2) БОМОМВМСБ (14) генерирует сигнал, поступающий на управляющий вход ключа (20).
В БФИПТРСБ (19) осуществляется формирование идентификационных параметров температурных режимов работы СБ. Например, формируется идентификационный параметр, равный «1» при возрастании угла g (данное значение соответствует случаю минимальной температуры СБ на восходе Солнца) и равный «2» при убывании угла g (данное значение соответствует случаю максимальной установившейся рабочей температуры СБ на заходе Солнца). Значения сформированных параметров передаются в БОМ (8).
По поступлении сигнала на управляющий вход ключа (20) ключ (20) «открыт» и через него измеренное значение тока с ДТ (7) поступает на БОМ (8), в котором осуществляется измерение напряжения на ШЭ (10) и по соотношению (1) рассчитывается значение выходной мощности СБ. При этом идентификация температурных режимов функционирования СБ, при которых были выполнены определения выходной мощности СБ, осуществляется по поступающим от БФИПТРСБ (19) соответствующим идентификационным параметрам.
Реализация БИУСПОКА (11), БИУВСГЗ (13), БИУСОДКА (15), БИВОКА (16) может быть выполнена на базе датчиков и аппаратуры Системы управления и навигации (СУДН) и Бортовой цифровой вычислительной системы (БЦВС) КА (см. [4], [5]). Реализация БОВОМВМСБ (12), БОМОМВМСБ (14), БОУВВГАГЗ (17), БОУПДС (18) и БФИПТРСБ (19) может быть выполнена на базе БЦВС КА. Ключ (20) может быть выполнен в виде элементарной аналоговой схемы. СБ (1), БФБ (2), УПСБ (3), УПУ (4), БУОСБС (5), БРТ (6), ДТ (7), БОМ (8), БУСЭС (9) могут быть выполнены на базе элементов СЭС (см. [1]).
Таким образом, рассмотрен пример реализации основополагающих блоков системы, по результатам которых принимается решение и реализуются предложенные операции.
Опишем технический эффект предлагаемых изобретений.
Предлагаемое техническое решение позволяет увеличить точность определения максимальной выходной мощности СБ за счет учета температурного режима СБ, а именно, обеспечения определения максимальной выходной мощности СБ как при максимальной установившейся рабочей температуре, так и при минимальной температуре СБ. При этом увеличение точности определения выходной мощности СБ достигается также за счет минимизации (исключения) использования отраженного от Земли излучения для выработки электроэнергии при выполнении операции определения максимальной выходной мощности СБ, чем устраняется непрогнозируемое и не подлежащее учету завышение текущих значений выходной мощности СБ.
Для иллюстрации на фиг.4 представлен график прихода электроэнергии от СБ PC MKC I(А) от времени t (сек) в течение витка орбиты при поддержании ориентации СБ на Солнце: 02.02.2004 г., виток 1704 (телеметрический номер), время 17.35-19.06 ДВМ, ориентация ИСК (см. [6]). На графике отмечены моменты времени t1 и t2, соответствующие выполнению условия (2) на восходе (при возрастании угла g) и на заходе (при убывании угла g), - для орбиты MKC данные моменты времени очень близки к моментам восхода и захода Солнца. Горизонтальными пунктирными линиями отмечены уровни прихода электроэнергии в моменты времени t1 и t2.
Источники информации
1. Система электроснабжения КА. Техническое описание. 300ГК.20Ю. 0000-АТО. РКК «Энергия», 1998.
2. Раушенбах Г. Справочник по проектированию солнечных батарей. Москва, Энергоатомиздат, 1983.
3. Ковтун B.C., Соловьев С.В., Заикин С.В., Городецкий А.А. Способ управления положением солнечных батарей космического аппарата и система для его осуществления. Описание изобретения к патенту РФ №2242408 по заявке 2003108114/11 от 24.03.2003 г.
4. Инженерный справочник по космической технике. Изд-во МО СССР, М., 1969.
5. Система управления движением и навигации КА. Техническое описание. 300ГК.12Ю. 0000-АТО. РКК «Энергия», 1998.
6. Рулев Д.Н., Стажков В.М., Корнеев А.П., Пантелеймонов В.Н., Мельник И.В. Оценка эффективности работы солнечных батарей российского сегмента международной космической станции по данным телеметрической информации // Труды XXXIX Чтений, посвященных разработке научного наследия и развитию идей К.Э.Циолковского (Калуга, 14-16 сентября 2004 г.). Секция «Проблемы ракетной и космической техники». - Казань: Казанский государственный университет им. В.И.Ульянова-Ленина. 2005.
7. Крошкин М.Г. Физико-технические основы космических исследований. - М.: Машиностроение. 1969.
8. Астрономический ежегодник СССР на 1993 год. Ленинград, «Наука», 1991.
Изобретение относится к области космической техники, а именно к системам электроснабжения космических аппаратов при использовании солнечных батарей. Способ определения максимальной выходной мощности солнечных батарей космического аппарата включает измерение высоты орбиты космического аппарата и определение по ней значения углового полураствора видимого с космического аппарата диска Земли (Qz) и угла возвышения верхней границы атмосферы над видимым с космического аппарата горизонтом Земли (ε), определение значения углового полураствора видимого с космического аппарата диска Солнца (Qs), измерение угловой скорости орбитального движения космического аппарата (ω), угла между направлением на Солнце и плоскостью орбиты космического аппарата (β), измерение угла возвышения направления на Солнце над видимым с космического аппарата горизонтом Земли (g) и максимальной выходной мощности солнечных батарей при их минимальной температуре. Система определения максимальной выходной мощности солнечных батарей космического аппарата включает блок измерения угла между направлением на Солнце и плоскостью орбиты космического аппарата, блок измерения угла возвышения направления на Солнце над видимым с космического аппарата горизонтом Земли, блок измерения угловой скорости орбитального движения космического аппарата, блок измерения высоты орбиты космического аппарата, блок определения угла возвышения верхней границы атмосферы Земли над видимым с космического аппарата горизонтом Земли, блок определения угла полураствора видимого с космического аппарата диска Солнца, блок определения витка выполнения операции определения максимальной выходной мощности солнечных батарей, блок определения моментов определения максимальной выходной мощности солнечных батарей, блок формирования идентификационных параметров температурных режимов солнечных батарей и ключ. Достигается увеличение точности определения максимальной выходной мощности солнечных батарей. 2 н.п. ф-лы, 4 ил.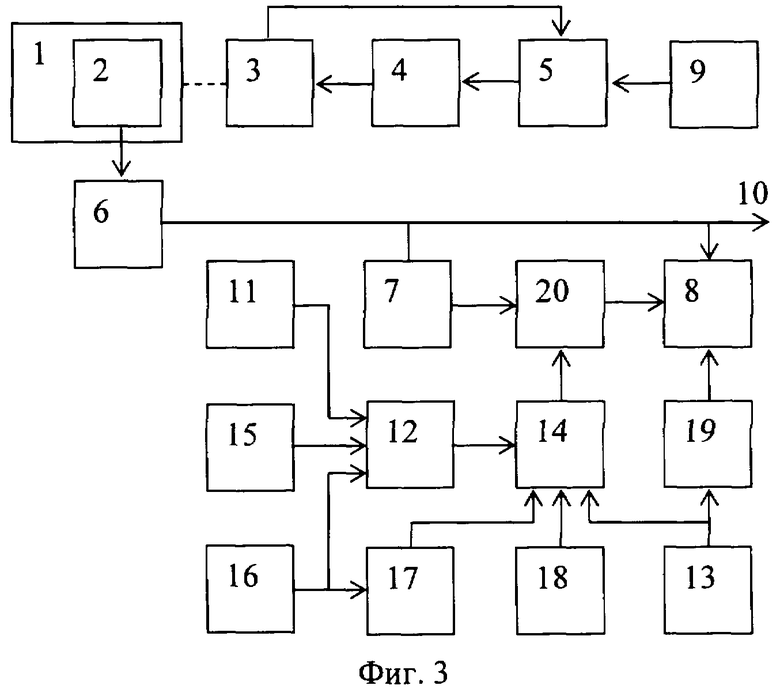
1. Способ определения максимальной выходной мощности солнечных батарей космического аппарата, включающий разворот панелей солнечных батарей в рабочее положение, соответствующее совмещению нормали к их освещенной рабочей поверхности с направлением на Солнце, измерение значения тока от солнечных батарей, измерение напряжения и определение максимальной выходной мощности солнечных батарей космического аппарата как произведение измеренных значений напряжения и тока от солнечных батарей, отличающийся тем, что дополнительно измеряют высоту орбиты космического аппарата и определяют по ней значения углового полураствора видимого с космического аппарата диска Земли (Qz) и угла возвышения верхней границы атмосферы над видимым с космического аппарата горизонтом Земли (ε), определяют значение углового полураствора видимого с космического аппарата диска Солнца (Qs), измеряют угловую скорость орбитального движения космического аппарата (ω), измеряют угол между направлением на Солнце и плоскостью орбиты космического аппарата (β), на витках, на которых значение измеряемого угла β менее или равно значению β°, определяемому по формуле
β°=arcos {cosQz/cos(Δt°ω)/2)},
где Δt° - требуемая минимально допустимая продолжительность теневого участка витка орбиты, измеряют угол возвышения направления на Солнце над видимым с космического аппарата горизонтом Земли (g) и максимальную выходную мощность солнечных батарей при их минимальной температуре определяют как произведение значений напряжения и тока от солнечных батарей, измеренных в момент касания видимым с космического аппарата диском Солнца верхней границы атмосферы Земли на восходе Солнца, определяемый из условия равенства значения измеряемого угла g сумме значений углов ε и Qs при возрастании значения угла g, а максимальную выходную мощность солнечных батарей при максимальной установившейся рабочей температуре определяют как произведение значений напряжения и тока от солнечных батарей, измеренных в момент касания видимым с космического аппарата диском Солнца верхней границы атмосферы Земли на заходе Солнца, определяемый из условия равенства значения измеряемого угла g сумме значений углов ε и Qs при убывании значения угла g.
2. Система определения максимальной выходной мощности солнечных батарей космического аппарата, включающая солнечную батарею с блоком установленных на ней фотоэлектрических батарей, устройство поворота солнечных батарей, усилительно-преобразующее устройство, блок управления ориентацией солнечных батарей по направлению на Солнце, блок регуляторов тока, датчик тока, блок определения мощности, блок управления системой электроснабжения и шину электроснабжения, при этом выход блока фотоэлектрических батарей соединен со входом блока регуляторов тока, выход которого соединен с шиной электроснабжения, к которой подключены датчик тока и блок определения мощности, а выход блока управления системой электроснабжения соединен с первым входом блока управления ориентацией солнечных батарей по направлению на Солнце, выход которого соединен с входом усилительно-преобразующего устройства, выход которого соединен с входом устройства поворота солнечных батарей, выход которого соединен со вторым входом блока управления ориентацией солнечных батарей по направлению на Солнце, причем устройство поворота солнечных батарей механически соединено с солнечной батареей, отличающаяся тем, что дополнительно введены блок измерения угла между направлением на Солнце и плоскостью орбиты космического аппарата, блок измерения угла возвышения направления на Солнце над видимым с космического аппарата горизонтом Земли, блок измерения угловой скорости орбитального движения космического аппарата, блок измерения высоты орбиты космического аппарата, блок определения угла возвышения верхней границы атмосферы Земли над видимым с космического аппарата горизонтом Земли, блок определения угла полураствора видимого с космического аппарата диска Солнца, блок определения витка выполнения операции определения максимальной выходной мощности солнечных батарей, блок определения моментов определения максимальной выходной мощности солнечных батарей, блок формирования идентификационных параметров температурных режимов солнечных батарей и ключ, при этом второй вход блока определения мощности соединен с выходом ключа, информационный и управляющий входы которого соединены с выходами, соответственно, датчика тока и блока определения моментов определения максимальной выходной мощности солнечных батарей, с первого по четвертый входы которого соединены с выходами, соответственно, блока измерения угла возвышения направления на Солнце над видимым с космического аппарата горизонтом Земли, блока определения угла полураствора видимого с космического аппарата диска Солнца, блока определения угла возвышения верхней границы атмосферы Земли над видимым с космического аппарата горизонтом Земли и блока определения витка выполнения операции определения максимальной выходной мощности солнечных батарей, первый, второй и третий входы которого соединены с выходами, соответственно, блока измерения угла между направлением на Солнце и плоскостью орбиты космического аппарата, блока измерения угловой скорости орбитального движения космического аппарата и блока измерения высоты орбиты космического аппарата, выход которого соединен также с входом блока определения угла возвышения верхней границы атмосферы Земли над видимым с космического аппарата горизонтом Земли, а выход блока измерения угла возвышения направления на Солнце над видимым с космического аппарата горизонтом Земли также соединен с входом блока формирования идентификационных параметров температурных режимов солнечных батарей, выход которого соединен с третьим входом блока определения мощности.
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СОЛНЕЧНЫХ БАТАРЕЙ КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2242408C1 |
| JP 7228299 А, 29.08.1995 | |||
| JP 7101400 А, 18.04.1995 | |||
| СОЛНЕЧНАЯ БАТАРЕЯ КОСМИЧЕСКОГО АППАРАТА | 2001 |
|
RU2200115C2 |

