Изобретение относится к принтеру с ручным управлением, способу управления принтером с ручным управлением, способу подготовки принтера с ручным управлением для печати изображения на множестве полос с использованием указанного способа и компьютерных программных продуктов, использующих указанные способы. Принтер с ручным управлением (также называемый «электронный ручной штамп») обычно представляет собой портативное электронное устройство для изготовления штампованных знаков посредством печати на подложке (например, документе или другом объекте, подлежащем штампованию). Принтер с ручным управлением настоящего типа содержит струйную печатающую головку с соплами, направленными к нижней стороне электронного ручного штампа, схему управления и детектор перемещения, при этом схема управления соединена с детектором перемещения и с печатающей головкой для струйной печати, а также выполнена с возможностью управления струйной печатающей головкой в ответ на показания, принятые от детектора перемещения, тем самым создавая печатное изображение, когда принтер с ручным управлением перемещается вручную по целевому носителю.
У струйных печатающих головок ограниченное количество сопел. Расположение этих сопел, а именно расстояние между соплами, определяет достижимое разрешение печатаемого изображения и ширину полосы (ширину полосы захвата) на целевом носителе, который может быть напечатан за один проход печатающей головки. Длина полосы ограничивается только размером целевого носителя (и теоретически содержанием чернил и чернильным картриджем, если именно так печатающая головка снабжается чернилами). Если оба размера печатаемого изображения больше ширины полосы, известно, что с помощью одной и той же печатающей головки последовательно печатаются две или более полосы в разных положениях. Так работают настольные струйные принтеры. У этих устройств есть несколько ограничений: они громоздкие, тяжелые и относительно дорогие; кроме того, их можно использовать только с целевым носителем, который можно подавать в механизмы подачи, которые обеспечивают эти принтеры (например, подача бумаги).
Известно, что для обеспечения более компактных, портативных и доступных по цене принтеров можно отказаться от механизма транспортировки бумаги и механизма перемещения печатающей головки, а вместо этого обеспечить принтер с ручным управлением, то есть принтер, который перемещается по целевому носителю с помощью руки во время печати. Примеры таких устройств раскрыты в документах US 5,927,872 и US 6,773,177. Эти устройства измеряют относительное перемещение принтера по целевому носителю в обоих направлениях и распознают, когда должна быть напечатана новая полоса захвата. Более конкретно, они основаны на выравнивании последующих уложенных друг на друга полосах посредством управления печатающей головкой для учета обнаруженной траектории перемещения печатающей головки по целевому носителю, при этом пользователь может свободно перемещать принтер по целевому носителю. По нашему опыту, точность, достигаемая с помощью имеющихся датчиков перемещения для обнаружения относительных перемещений (например, оптических датчиков), недостаточна для достижения приемлемого качества печати с помощью этого способа, поскольку ошибки измерения и, следовательно, ошибки выравнивания накапливаются по мере прохождения расстояния, покрываемого печатающей головкой. В результате печать непрерывных и частично перекрывающихся полос в большинстве случаев приводит к нечетким отпечатанным изображениям вследствие недостаточного выравнивания соответствующих полос.
Известный подход к предотвращению этих ошибок основан на признании того, что замена или дополнение обнаружения относительных перемещений с помощью обнаружения абсолютного положения относительно напечатанного изображения должен позволять избегать вышеупомянутого накопления ошибок. Этот подход включает в себя сканирование уже напечатанного изображения и выполнение распознавания изображения на отсканированном изображении, чтобы определить положение отсканированного изображения внутри изображения, которое нужно напечатать, и использовать эту информацию для корректировки выравнивания. Очевидно, что этот подход требует мощной аппаратной части для сканирования и распознавания изображений, что противоречит замыслу обеспечения простого и доступного устройства.
Более экономически эффективный подход раскрыт в документе US 7,735,951. Он включает в себя печать меток совмещения вместе с печатаемым изображением, и таким образом упрощает ручное вертикальное/поперечное выравнивание. В частности, пользователь должен выровнять напечатанную метку совмещения предыдущей полосы с контрольной меткой на принтере перед печатью следующей полосы. Этот подход имеет очевидный недостаток, заключающийся в том, что на отпечатанном изображении появляются отпечатанные метки совмещения.
Другие известные устройства отображают ход процесса печати на графическом экране, чтобы информировать пользователя об отсутствующих областях, над которыми ему следует переместить печатающую головку для завершения печатного изображения. Разрешение этих экранов является недостаточным и слишком низким, чтобы обеспечить приемлемое выравнивание последующих полос. Примеры таких устройств раскрыты в документах US 6,942,402 и US 8,107,108.
С другой целью, а именно для того, чтобы направлять пользователя через последовательность отдельных изображений, которые должны быть напечатаны, документ US 2007/092325 A1 раскрывает устройство, которое генерирует слышимые звуки, информирующие пользователя о положении следующего изображения после того, как настоящее изображение будет завершено. Принтер не дает активных указаний относительно точного выравнивания для печати последующего изображения.
Документ US 2007/120937 A1 относится к портативному принтеру, который вручную перемещается по поверхности, на которой он будет печатать. Принтер определяет направление горизонтального перемещения (слева направо или наоборот) и настраивается для определенного направления. Раскрытие US 2007/120937 A1 ограничивается обработкой горизонтального перемещения, то есть в направлении, параллельном полосе, и поэтому не относится к совмещению разных полос.
В документе US 6 357 939 B показан другой (на вид гипотетический) портативный принтер в основном с круглым оптическим датчиком, окружающим печатающую головку. Очевидно, этот принтер можно перемещать в произвольных направлениях по поверхности, пока не будут напечатаны все части изображения. Принтер содержит визуальный или звуковой индикатор, указывающий на завершение печати.
Документ US 8 210 758 B2 относится к еще одному портативному принтеру, способному обнаруживать и определять расстояние горизонтального перемещения, а также обеспечивать общие инструкции пользователю относительно перемещения принтера, например, посредством индикации еще не напечатанных частей на дисплее. Проблема выравнивания последующих полос специально не рассматривается.
Задача настоящего изобретения состоит в том, чтобы помочь пользователю в достижении приемлемого выравнивания последующих полос с помощью относительно простого и доступного устройства.
В изобретении предлагается способ управления принтером с ручным управлением, содержащий: обнаружение поперечного перемещения принтера с ручным управлением после завершения первой полосы, сравнение (т.е. непрерывный мониторинг) поперечного расстояния, пройденного с помощью поперечного перемещения, с предварительно определенным (например, предварительно заданным) поперечным расстоянием между указанными первой полосой и второй полосой, и выдача сигнала остановки поперечного перемещения, когда поперечное расстояние, пройденное с помощью поперечного перемещения, достигает предварительно определенного поперечного расстояния.
Соответственно, изобретение предлагает принтер с ручным управлением, как определено вначале, дополнительно содержащий блок сигнализации, подключенный к схеме управления, при этом схема управления выполнена с возможностью отслеживания поперечного перемещения, обнаруженного детектором перемещения между первой полосой и второй полосой по сравнению с поперечным расстоянием, пройденным с помощью поперечного перемещения, с предварительно определенным поперечным расстоянием между указанными полосами, при этом выдается команда блоку сигнализации подать сигнал остановки, когда поперечное расстояние, пройденное с помощью поперечного перемещения, достигнет предварительно определенного поперечного расстояния. Детектор перемещения может быть, например, кодирующим устройством оптической мыши, обеспечивающим считывание в единицах на сантиметр или на дюйм.
Другими словами, изобретение предлагает непрерывно отслеживать поперечное смещение принтера после завершения первой полосы и уведомлять пользователя с помощью сигнала остановки поперечного перемещения в момент, когда поперечное смещение должно быть остановлено и должна начаться печать второй полосы. Сигнал остановки поперечного перемещения обеспечивает мгновенное уведомление о достаточном поперечном перемещении или смещении. Посредством медленного и внимательного выполнения поперечного смещения пользователь может достичь точности совмещения, которая сравнима или превышает точность, достигаемую известными метками совмещения, хотя и без недостатка искажения печатного изображения.
Предпочтительно, предварительно определённое поперечное расстояние больше, чем средняя ширина полосы для первой и второй полос на предварительно заданное поперечное заполнение. Здесь под шириной полосы понимается ширина фактически используемой полосы, которая может быть меньше максимально возможной ширины полосы, определяемой параметрами сопла. Например, несколько намеренно узких полос (т.е. имеющих ширину полосы меньше максимально возможной ширины полосы) могут использоваться для печати строк, разделенных межстрочным интервалом, при этом две строки не помещаются в одну полосу при максимальной ширине полосы. Средняя ширина полосы для первой и второй полос соответствует расстоянию между осевыми линиями двух полос. Предварительно заданное поперечное заполнение позволяет учесть ошибки выравнивания и результирующие перекрытия полос посредством обеспечения минимального расстояния между последующими полосами. Оптимальное предварительно заданное поперечное заполнение также зависит от точности датчика (-ов) перемещения, при этом более высокая точность датчика допускает меньшее поперечное заполнение. Предварительно заданное поперечное заполнение может составлять от 0,1 до 3 мм, предпочтительно приблизительно 1 мм.
Кроме того, предварительно определённое поперечное расстояние может быть определено как функция траектории продольного перемещения принтера с ручным управлением во время печати первой полосы. Например, принтер может быть выполнен с возможностью активно компенсировать изгиб на траектории, по которой следует пользователь по анатомическим причинам (с центром в локте), балансируя положение изображения относительно полосы в соответствии с обнаруженным смещением от прямой траектории. В этих случаях предварительно определённое поперечное расстояние может быть увеличено или уменьшено, чтобы сбалансировать поперечное смещение по длине полосы, которое предположительно будет наблюдаться также во время последующей полосы.
Сигнал остановки поперечного перемещения может быть звуковым, визуальным или тактильным сигналом (например, звук, шум, мигание света, изменение цвета для света, выключение света, вибрация). Предпочтительно, сигнал остановки поперечного перемещения является звуковым сигналом, поскольку пользователь визуально фокусируется на целевой среде. Действующие объекты для создания тактильного сигнала являются относительно более дорогими и также могут создавать впечатление нарушения выравнивания. В рамках изобретения сигнал остановки поперечного перемещения также может быть электрическим или радиосигналом, который преобразуется в уведомление, воспринимаемое пользователем принтера с ручным управлением с помощью отдельного устройства (например, умных часов или внешнего динамика). Соответственно, блок сигнализации принтера с ручным управлением предпочтительно представляет собой динамик, световой индикатор (например, светодиод) или вибрационный двигатель.
Что касается множества полос, нанесенных на целевой носитель во время печати, по меньшей мере, один конец каждой из последних полос выровнен в поперечном направлении с началом прилегающей полосы. Предпочтительно, множество полос являются по существу параллельными, в частности поперечно проложенные полосы. Здесь термины «конец» и «начало» относятся к продольному направлению перемещения. Для полосы, наносимой посредством перемещения принтера слева направо, левая граница является началом, тогда как для полосы, наносимой посредством перемещения принтера справа налево, правая граница является началом.
Оказалось, что создается преимущество, если способ включает в себя сигнализацию об окончании полосы посредством подачи сигнала остановки продольного перемещения после завершения первой полосы. Сигнал остановки продольного перемещения может отличаться от сигнала остановки поперечного перемещения только в момент его выполнения или подачи, то есть один и тот же звук или шум могут использоваться для сигнала остановки продольного перемещения и сигнала остановки поперечного перемещения. В частности, сигнал остановки продольного перемещения может подаваться в конце каждой из нескольких полос. Следует отметить, что сигнал остановки продольного перемещения не является необходимым, потому что перемещение за пределами диапазона, то есть дальше, чем требуется для печати сегмента изображения, подлежащего печати, в отношении сегмента, который назначен текущей полосе, можно компенсировать добавлением соответствующего продольного заполнения для последующей полосы. Тем не менее, создается преимущество, если минимизировать расстояние, преодолеваемое продольным перемещением, до расстояния, необходимого для печати указанного сегмента, чтобы уменьшить смещение последующих полос, которое будет эффективно увеличиваться посредством прохождения больших расстояний.
В этом контексте особым преимуществом является то, что способ содержит сигнализацию об окончании полосы в зависимости от печатаемой области текущей полосы, от продольного направления перемещения принтера с ручным управлением, и от начала области печати последующей полосы. Продольное направление перемещения определяет, какая граница текущей полосы является её концом, а какая граница последующей полосы является её началом. Область печати (или, точнее, область, которая будет печататься, или просто «содержимое»), связанная с каждой полосой, определяет относительное положение и продольную протяженность (или просто «длину») соответствующей полосы. Подходящий момент для подачи сигнала остановки продольного перемещения зависит не только от содержания текущей полосы, но также и от содержания следующей полосы. Поскольку продольное направление перемещения следующей полосы часто будет обратным продольному направлению перемещения текущей полосы, принтер, по существу, будет перемещаться в продольном направлении не только до тех пор, пока не закончится содержимое текущей полосы, но также до тех пор, пока не закончится содержимое следующей полосы*.
Поскольку настоящий способ может поддерживать прокладывание полос в обоих поперечных направлениях (например, сверху вниз или снизу вверх), может быть полезно направлять пользователя, указывая направление поперечного перемещения после завершения первой полосы.
В предпочтительном варианте осуществления изобретения настоящий способ содержит переключение принтера с ручным управлением между режимом печати и режимом поступательного перемещения, в режиме печати обнаружение продольного перемещения принтера с ручным управлением и управление печатающей головкой принтера с ручным управлением, в соответствии с обнаруженным продольным перемещением, чтобы напечатать содержимое изображения текущей полосы, и в режиме поступательного перемещения управлять печатающей головкой, чтобы она оставалась бездействующей. Режим печати по существу соответствует режиму работы известных ручных принтеров. Их можно переключать между режимом печати и режимом ожидания, когда принтер является неактивным. Настоящий способ включает третий режим, режим поступательного перемещения, в котором принтер активно отслеживает свое перемещение на целевом носителе, а печатающая головка остается в режиме бездействия. В частности, в режиме поступательного перемещения неполные полосы не печатаются. Любая печать может происходить только в режиме печати.
В этом контексте настоящий способ предпочтительно содержит переключение принтера с ручным управлением из режима поступательного перемещения в режим печати одновременно с подачей сигнала остановки поперечного перемещения. Момент, когда подается сигнал остановки поперечного перемещения, указывает, что поперечное перемещение принтера завершено и принтер достиг положения для печати второй или последующей полос.
Когда способ содержит подачу сигнала остановки продольного перемещения, предпочтительно он также содержит переключение принтера с ручным управлением из режима печати в режим поступательного перемещения одновременно с подачей сигнала остановки продольного перемещения. Момент, когда подается сигнал остановки продольного перемещения, указывает на то, что логика перемещения принтера завершена и принтер может быть перемещен в следующее поперечное положение для печати второй или последующей полос.
Предпочтительно, в режиме печати направление продольного перемещения определяется во время печати первой полосы, при этом направление продольного перемещения во время последующих полос предполагается обратным направлению предыдущей полосы. Таким образом, последующие полосы печатаются в чередующихся продольных направлениях, то есть посредством многократного перемещения принтера с ручным управлением поочередно в продольном направлении для печати полосы и в поперечном направлении между концом полосы и началом следующей полосы. Соответственно, схема управления принтером с ручным управлением предпочтительно выполнена с возможностью определять направление продольного перемещения для печати первой полосы и принимать чередующиеся направления продольного перемещения для последующих полос.
Таким образом, в рамках объема настоящего изобретения оно также содержит способ печати изображения, содержащего по меньшей мере два неперекрывающихся сегмента изображения, при этом способ содержит: определение направления и расстояния перемещения, отслеживание продольных и поперечных перемещений, печать первой полосы, перемещение принтера с ручным управлением в поперечном направлении относительно первой полосы, подачу сигнала остановки поперечного перемещения для поперечного перемещения и печать второй полосы, проложенной поперечно по отношению к первой полосе.
Изобретение дополнительно обеспечивает компьютерный программный продукт для печати множества полос с помощью принтера с ручным управлением, компьютерный программный продукт содержит программные части, которые при загрузке в компьютер выполнены с возможностью выполнения этапов способа, как описано выше, или одного из его предпочтительных вариантов осуществления.
Кроме того, изобретение обеспечивает способ подготовки принтера с ручным управлением для печати изображения на множестве полос с использованием способа, описанного выше, или одного из его предпочтительных вариантов осуществления, содержащего: идентификацию частей изображения, разделенных параллельными прямыми промежутками с предварительно заданной минимальной шириной промежутка, назначение смежных идентифицированных частей изображения для последующих полос, и передачу данных изображения, связанных с каждой полосой, а также информацию о выравнивании всех полос на ручном принтере. Таким образом, при подготовке заданного изображения к печати для печати с помощью принтера с ручным управлением, этот способ назначает части изображения, разделенные прямым промежутком с предварительно заданной минимальной шириной промежутка, на последующие полосы, тем самым разделяя изображение на сегменты, при этом каждый сегмент назначается к полосе для печати, при этом избегая того, чтобы содержимое следующей полосы было ближе, чем предварительно заданная минимальная ширина промежутка, тем самым компенсируя или скрывая ошибки выравнивания во время работы принтера.
Наконец, изобретение также обеспечивает компьютерный программный продукт для печати множества полос на ручном принтере, компьютерный программный продукт содержит программные части, которые при загрузке в компьютер предназначены для выполнения этапов способа, описанных непосредственно выше.
Ссылаясь теперь на чертежи, на которых фигуры служат для иллюстрации настоящего изобретения, а не для его ограничения,
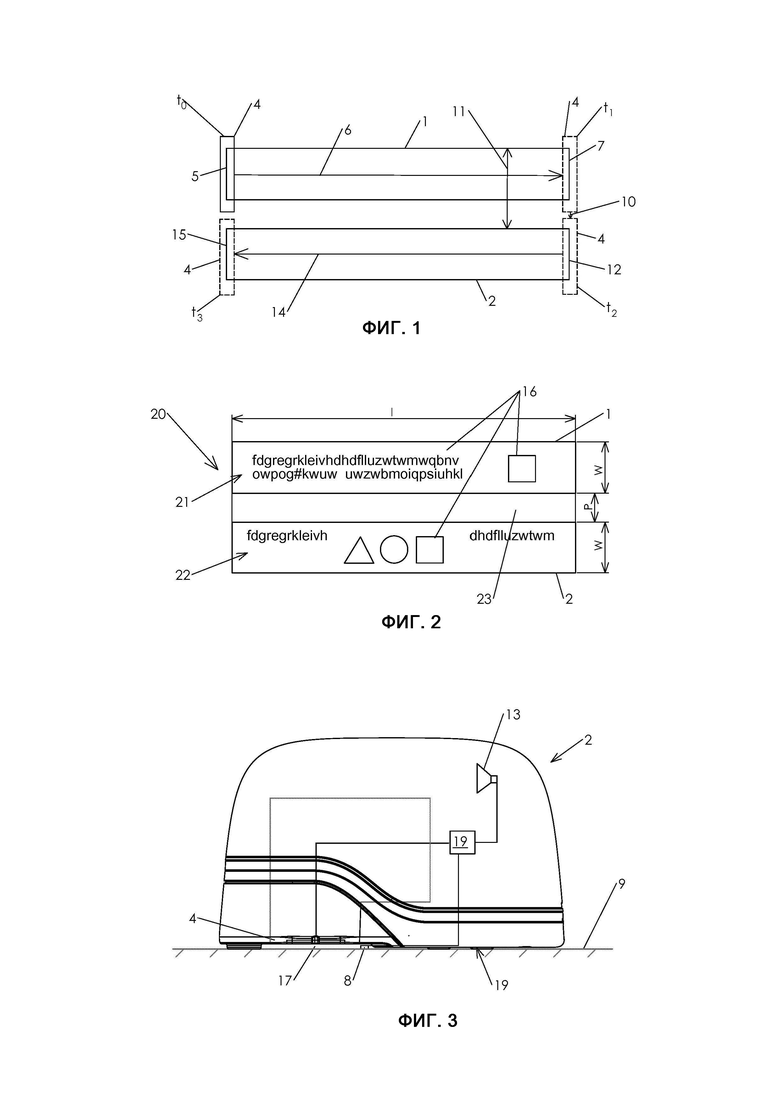
Фиг. 1 схематично иллюстрирует простое применение настоящего способа для печати на полосах одинаковой длины и ширины;
Фиг. 2 схематично показывает содержимое двух полос по фиг. 1;
Фиг. 3 схематически показывает вертикальный разрез принтера с ручным управлением в соответствии с настоящим изобретением;
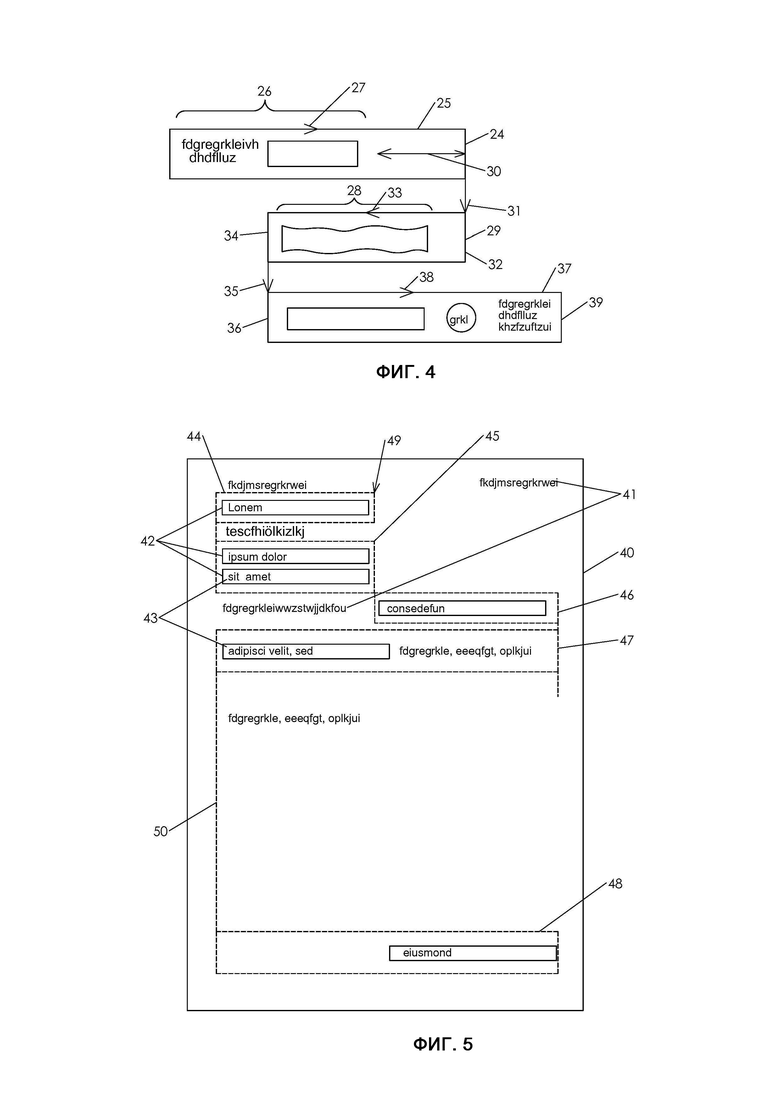
Фиг. 4 схематично иллюстрирует второй пример применения настоящего способа; и
Фиг. 5 схематично иллюстрирует третий пример, показывающий применение настоящего способа для заполнения предварительно напечатанного листа формы.
На фиг. 1 показаны две полосы 1, 2, которые должны быть покрыты посредством перемещения принтера 3 с ручным управлением (см. фиг. 3). Узкие вертикальные прямоугольники указывают различные положения печатающей головки 4 принтера 3 с ручным управлением в разные моменты времени t0, t1, t2, t3 во время процедуры печати. Процедура печати начинается в момент времени t0 с печатающей головкой 4, позиционируемой на левой границе 5 первой полосы 1. В этом положении принтер 3 запускается в режиме печати. Начиная с этого момента, принтер перемещается в продольном направлении 6 к противоположной границе 7 первой полосы 1 в продольном перемещении, и достигает указанной противоположной границы 7 в момент времени t1. Находясь в режиме печати, принтер 3 обнаруживает продольное перемещение и управляет печатающей головкой 4, в соответствии с обнаруженным продольным перемещением, чтобы распечатать содержимое изображения текущей полосы 1. Более конкретно, оптический датчик 8 перемещения принтера 3 с ручным управлением отслеживает продольное перемещение, обнаруживая относительное смещение между принтером 3 с ручным управлением и целевой подложкой 9, на которой он печатает 10*. Направление продольного перемещения определяется принтером 3 во время печати первой полосы 1. Предполагается, что направление продольного перемещения во время второй полосы 2 является обратным (или противоположным) направлению первой полосы, поскольку полосы, как известно, должны быть проложены поперечно друг другу.
В момент времени t1 первая полоса 1 завершается, и процедура печати может продолжаться со второй полосы 2. Принтер 3 переключается в режим поступательного перемещения. В этом режиме печатающая головка управляется таким образом, чтобы оставаться в режиме бездействия. Направление поперечного перемещения указывается светодиодом принтера 3 после завершения первой полосы 1.
Чтобы установить печатающую головку 4 в нужное положение, необходимо поперечное перемещение в поперечном направлении 10. Оптический датчик 8 перемещения обнаруживает поперечное перемещение принтера 3 с ручным управлением после завершения верхней полосы 1. Поперечное расстояние, покрываемое с помощью поперечного перемещения, сравнивается с предварительно определенным поперечным расстоянием 11 между верхней полосой 1 и нижней полосой 2. Предварительно определенное поперечное расстояние 11 соответствует расстоянию, на которое печатающая головка должна быть перемещена в поперечном направлении 10, чтобы достичь начала и правой границы 12 нижней полосы 2. Предварительно определенное поперечное расстояние 11 больше, чем средняя ширина полосы по сравнению с верхней полосой 1 и нижней полосой 2, которая равняется одинаковой ширине W полосы обоих полос 1, 2, с предварительно заданным поперечным заполнением P (см. фиг. 2). В данном случае длины l двух полос 1, 2 также идентичны. Конец верхней полосы 1, то есть ее правая граница 7, выровнена в поперечном направлении с началом, то есть правой границей 12, нижней полосы 2. Когда поперечное расстояние, пройденное с помощью поперечного перемещения, достигает предварительно определенного поперечного расстояния 11 в момент времени t2, сигнал остановки поперечного перемещения в виде кратковременного звукового сигнала подается блоком 13 сигнализации принтера 3 с ручным управлением. В это же самое время принтер 3 с ручным управлением переключается из режима поступательного перемещения в режим печати. Пользователь замечает сигнал остановки поперечного перемещения в момент времени t2 и останавливает перемещение в поперечном направлении 10. Затем он продолжает процедуру печати, перемещая принтер 3 во втором продольном направлении 14, которое противоположно продольному направлению 6, в направлении левой границы 15 или конца нижней полосы 2. В момент времени t3 печатающая головка 4 достигает левой границы 15.
Во время продольных перемещений между моментами времени t0 и t1 и между моментами времени t2 и t3 принтер 3 печатает сегменты изображения, назначенные для соответствующих полос 1 и 2, способом, известным в данной области техники, и основанным на показаниях оптического датчика 8 перемещения. В моменты времени t1 и t3 о конце каждой полосы 1, 2 сигнализируется посредством выдачи сигнала остановки продольного перемещения после завершения соответствующей полосы 1, 2. В момент времени t1 принтер 3 переключается из режима печати в режим поступательного перемещения. Сигнал остановки продольного перемещения - это звуковой сигнал с другой высотой тона, чем сигнал остановки поперечного перемещения. Как можно понять из фиг. 2, на которой показан печатный контент 16, связанный с каждой из двух полос 1, 2, и как видно из фиг. 3, принтер 3 с ручным управлением содержит: струйную печатающую головку 4 с соплами 17, направленными к нижней стороне 18 принтера 3 с ручным управлением, обращенной к целевому носителю 9, схему 19 управления, детектор 8 перемещения и блок 13 сигнализации. Схема 19 управления подключена к детектору 8 перемещения, к струйной печатающей головке 4, и к блоку 13 сигнализации. Схема 19 управления дополнительно выполнена с возможностью управления струйной печатающей головкой 4 в ответ на показания, принятые от детектора 8 перемещения. Схема 19 управления выполнена с возможностью отслеживания поперечного перемещения, обнаруженного с помощью детектора 8 перемещения между первой полосой 1 и второй полосой 2, сравнения поперечного расстояния, пройденного с помощью поперечного перемещения, с предварительно определенным поперечным расстоянием 11 между указанными полосами 1, 2 и командой блока 13 сигнализации для выдачи сигнала остановки поперечного перемещения, когда поперечное расстояние, пройденное с помощью поперечного перемещения, достигает предварительно определенного поперечного расстояния 11. Схема 19 управления выполнена с возможностью определять направление продольного перемещения для печати первой полосы 1 и принимать чередующиеся направления продольного перемещения для второй полосы 2 вследствие их проложенного расположения в поперечном направлении. Блок 13 сигнализации представляет собой динамик для создания кратковременных звуковых сигналов разной высоты звука.
Чтобы подготовить принтер 3 с ручным управлением для печати изображения 20 на множестве полос 1, 2 с использованием вышеупомянутого способа, в котором идентифицируются части 21, 22 изображения, разделенные прямым промежутком 23 с предварительно заданной минимальной шириной (например, 0,2 мм) промежутка (см. фиг. 2). Затем прилегающие идентифицированные части 21, 22 изображения назначаются последующим полосам 1, 2. Наконец, к принтеру с ручным управлением 3 передаются данные изображения, связанные с каждой полосой 1, 2 на основе назначенных частей 21, 22 изображения, и информация о выравнивании всех полос 1, 2.
Пример, показанный на фиг. 4, иллюстрирует, что конец 24 первой полосы 25 - и, следовательно, сигнализация о конце - зависит от печатной области 26 настоящей полосы 25, от продольного направления 27 перемещения принтера 3 с ручным управлением, и от начала области 28 печати второй полосы 29. В представленном примере продольное заполнение 30 добавляется к содержимому первой полосы 25 для достижения желаемого конечного положения 24. Когда печатающая головка 4 достигает конца 24, выдаётся сигнал остановки продольного перемещения. С этого местоположения выполняется поперечное перемещение в поперечном направлении 31, чтобы достичь начала 32 второй полосы 29, в этот момент выдается сигнал остановки поперечного перемещения. Вторая полоса 29 печатается посредством перемещения в продольном направлении 33, противоположном продольному направлению 27. На конце 34 второй полосы 29 снова выдается сигнал остановки продольного перемещения. Пользователь перемещает принтер 3 в поперечном направлении 35 до тех пор, пока не выдается другой сигнал остановки поперечного перемещения, когда печатающая головка* 4 достигает начала 36 третьей полосы 37. Оттуда пользователь перемещает принтер 3 в продольном направлении 38 до тех пор, пока конец 39 третьей полосы 37 не оповещается с помощью сигнала остановки продольного перемещения.
На фиг. 5 показан более полный пример настоящего способа заполнения листа 40 бумажной формы. Лист 40 бумажной формы содержит предварительно напечатанное содержимое 41. Между предварительно напечатанным содержимым* 41 расположены несколько полей 42 формы. Пользователь настоящего принтера с ручным управлением может заполнить поля 42 формы пользовательским печатным содержимым 43 (представленным обычными словами-заполнителями «Lorem ipsum dolor ...»). Для этого данные изображения пользовательского печатного содержимого 43 соответствующим образом назначаются пяти полосам 44-48. Принтер 3 с ручным управлением первоначально позиционируется у правой границы 49 первой полосы 44. Затем принтер 3 перемещается по очереди в восемнадцати продольных и поперечных направлениях через последовательность полос сверху вниз. Примечательно, что направление продольного перемещения второй полосы 45 и последующей третьей полосы 46 являются идентичными, показывая, что случай, когда направление продольного перемещения чередуется, если соответствующие полосы не проложены поперечно в верхней части друг друга, а скорее также смещены в продольном направлении, не является обязательным. Как проиллюстрировано поперечным перемещением 50 между четвертой полосой 47 и пятой полосой 48, поперечное перемещение 50 может также преодолевать поперечные расстояния, во много раз превышающие ширину полосы.
| название | год | авторы | номер документа |
|---|---|---|---|
| БИЛЕТНЫЙ ПРИНТЕР | 2012 |
|
RU2578119C2 |
| КАРТРИДЖ ПРИНТЕРА, ПРИНТЕР, УСТРОЙСТВА ДЛЯ ПЕРЕМЕЩЕНИЯ БУМАГИ | 1995 |
|
RU2120387C1 |
| ПЕЧАТАЮЩЕЕ УСТРОЙСТВО И СПОСОБ ДЛЯ УПРАВЛЕНИЯ ПЕЧАТАЮЩИМ УСТРОЙСТВОМ | 2015 |
|
RU2678891C2 |
| Способ контроля печати первого слоя на 3D принтере | 2018 |
|
RU2714332C2 |
| ИСТОЧНИК ЭТИКЕТОК И ПРИНТЕР ЭТИКЕТОК | 2007 |
|
RU2414357C2 |
| БИЛЕТНЫЙ ПРИНТЕР | 2014 |
|
RU2649374C2 |
| ПРИНТЕР ДЛЯ ПЕЧАТИ ЭТИКЕТОК И СИСТЕМА ДЛЯ МАРКИРОВКИ УДЛИНЕННОГО ОБЪЕКТА | 2020 |
|
RU2795110C1 |
| СПОСОБ ВВОДА ПЕЧАТАЕМЫХ ДАННЫХ ДЛЯ ЗАПЕЧАТЫВАНИЯ ЗАПЕЧАТЫВАЕМОГО ОБЪЕКТА С ПОМОЩЬЮ ПРИНТЕРА И ПРИНТЕР ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 2016 |
|
RU2694915C1 |
| СПОСОБ ПОДСТРАХОВКИ ПРОЦЕССА ПЕЧАТИ С ПОМОЩЬЮ ПРИНТЕРА И ПРИНТЕР ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 2016 |
|
RU2696027C1 |
| 3D-принтер | 2022 |
|
RU2800191C1 |
Изобретение относится к принтеру с ручным управлением, способу управления принтером с ручным управлением, способу подготовки принтера с ручным управлением для печати изображения на множестве полос с использованием указанного способа и компьютерных программных продуктов, использующих указанные способы. Способ управления принтером (3) с ручным управлением, содержащий: обнаружение поперечного перемещения принтера (3) с ручным управлением после завершения первой полосы (1), сравнение поперечного расстояния, пройденного с помощью поперечного перемещения, с предварительно определенным поперечным расстоянием (11) между указанной первой полосой (1) и второй полосой (2), и выдачей сигнала остановки поперечного перемещения, когда поперечное расстояние, пройденное с помощью поперечного перемещения, достигает предварительно определенного поперечного расстояния (11). 5 н. и 10 з.п. ф-лы, 5 ил.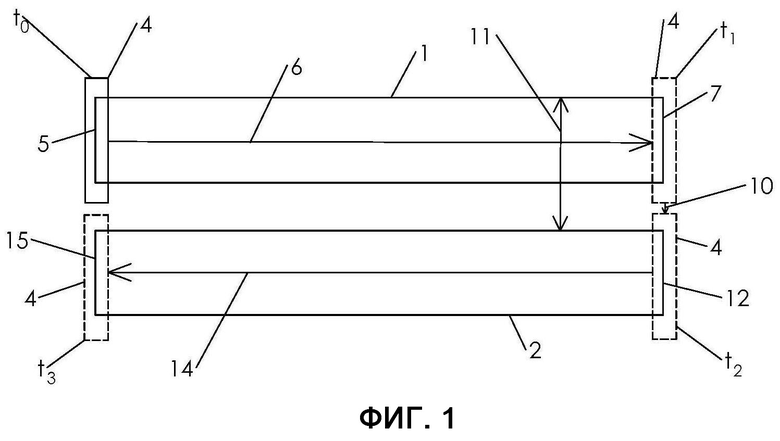
1. Способ управления принтером (3) с ручным управлением, содержащий:
обнаружение поперечного перемещения принтера (3) с ручным управлением после завершения первой полосы (1),
сравнение поперечного расстояния, пройденного с помощью поперечного перемещения, с предварительно определенным поперечным расстоянием (11) между указанной первой полосой (1) и второй полосой (2), и
выдача сигнала остановки поперечного перемещения, когда поперечное расстояние, пройденное с помощью поперечного перемещения, достигает предварительно определенного поперечного расстояния (11).
2. Способ по п. 1, отличающийся тем, что предварительно определенное поперечное расстояние (11) больше, чем средняя ширина полосы для первой полосы (1) и второй полосы (2) посредством предварительно заданного поперечного заполнения (P).
3. Способ по п. 1 или 2, отличающийся тем, что предварительно определенное поперечное расстояние (11) определяется как функция траектории продольного перемещения принтера (3) с ручным управлением во время печати первой полосы (1).
4. Способ по одному из предшествующих пунктов, отличающийся тем, что сигнал остановки поперечного перемещения представляет собой звуковой, визуальный или тактильный сигнал, предпочтительно звуковой сигнал.
5. Способ по одному из предшествующих пунктов, отличающийся тем, что по меньшей мере один конец каждой, за исключением последней, полосы выровнен в поперечном направлении с началом прилегающей полосы.
6. Способ по одному из предшествующих пунктов, отличающийся тем, что об окончании полосы сигнализируется посредством подачи сигнала остановки продольного перемещения после окончания первой полосы (1).
7. Способ по п. 6, отличающийся тем, что об окончании полосы сигнализируется в зависимости от области печати настоящей полосы, от продольного направления перемещения принтера (3) с ручным управлением, и от начала области печати последующей полосы.
8. Способ по одному из предшествующих пунктов, отличающийся тем, что принтер (3) с ручным управлением переключается между режимом печати и режимом поступательного перемещения,
в режиме печати, обнаруживается продольное перемещение принтера (3) с ручным управлением и выполняется управление печатающей головкой (4) принтера (3) с ручным управлением, в соответствии с обнаруженным продольным перемещением, чтобы напечатать содержимое изображения текущей полосы,
и в режиме поступательного перемещения выполняется управление печатающей головкой (4) таким образом, чтобы она оставалась бездействующей.
9. Способ по п. 8, отличающийся тем, что принтер (3) с ручным управлением переключается из режима поступательного перемещения в режим печати одновременно с подачей сигнала остановки поперечного перемещения.
10. Способ по одному из пп. 8 или 9, отличающийся тем, что в режиме печати направление продольного перемещения определяется во время печати первой полосы (1), при этом предполагается, что направление продольного перемещения во время последующих полос является обратным направлению перемещения предыдущей полосы.
11. Принтер (3) с ручным управлением, содержащий:
- струйную печатающую головку (4) с соплами (17), направленными к нижней стороне (18) принтера (3) с ручным управлением,
- схему (19) управления, и
- детектор (8) перемещения,
при этом схема (19) управления подключена к детектору (8) перемещения и к струйной печатающей головке (4) и выполнена с возможностью управления струйной печатающей головкой (4) в ответ на показания, принятые от детектора (8) перемещения,
отличающийся тем, что принтер (3) с ручным управлением дополнительно содержит блок (13) сигнализации, подключенный к схеме (19) управления,
при этом схема (19) управления выполнена с возможностью отслеживания поперечного перемещения, обнаруженного детектором (8) перемещения между первой полосой (1) и второй полосой (2), если сравнивать поперечное расстояние, пройденное с помощью поперечного перемещения, с предварительно определенным поперечным расстоянием (11) между указанными полосами (1; 2) и подачи команды блоку (13) сигнализации на подачу сигнала остановки поперечного перемещения, когда поперечное расстояние, пройденное с помощью поперечного перемещения, достигает предварительно определенного поперечного расстояния (11).
12. Принтер (3) с ручным управлением по п. 11, отличающийся тем, что блок (13) сигнализации представляет собой динамик, световой индикатор или вибрационный двигатель.
13. Считываемый компьютером носитель записи, содержащий записанный на нем компьютерный программный продукт для печати множества полос с помощью принтера (3) с ручным управлением, компьютерный программный продукт, содержит программные части, которые при загрузке в компьютер предназначены для выполнения этапов способа по одному из пп. 1-10.
14. Способ подготовки принтера (3) с ручным управлением к печати изображения на множестве полос с использованием способа по одному из пп. 1-10, содержащий:
идентификацию частей (21, 22) изображения, разделенных параллельными прямыми промежутками (23) с предварительно заданной минимальной шириной промежутка,
присвоение прилегающим идентифицированным частям (21, 22) изображения последующих полос (1, 2),
передачу данных изображения, связанных с каждой полосой (1, 2), и информации о выравнивании всех полос (1, 2) на принтер (3) с ручным управлением.
15. Считываемый компьютером носитель записи, содержащий записанный на нем компьютерный программный продукт для печати множества полос с помощью принтера (3) с ручным управлением, компьютерный программный продукт, содержит программные части, которые при загрузке в компьютер предназначены для выполнения этапов способа по п. 14.
| US 2007120937 A1, 31.05.2007 | |||
| US 6357939 B1, 19.03.2002 | |||
| US 8210758 B2, 03.07.2012. |
