Изобретение относится к ракетостроению и может быть использовано для создания систем воздушно-космической обороны (ВКО) на основе малоразмерных гиперзвуковых реактивных управляемых снарядов кинетического действия.
В современных условиях, когда высокая накопленная энергия ядерных наступательных средств вооружения становится несовместимой с возможностью их применения, предпочтительным средством защиты государств в условиях политического противостояния становится развитие систем обороны, сочетающих малую энергию воздействия с высокой точностью и эффективностью управления ею. Это касается и средств перехвата воздушных и космических целей.
Наиболее универсальным средством перехвата воздушных и космических целей являются реактивные управляемые снаряды, снабженные ракетными двигателями, т.к. они могут действовать в широком диапазоне высот - от нуля до межпланетных, а также скоростей, достигающих 10 и более км /сек.
Однако недостатки существующих ракетных систем перехвата связаны с большой стартовой массой и высокой себестоимостью производства ракет-перехватчиков, что не позволяет распределить средства ВКО по всей территории страны с достаточной плотностью и, в частности, приблизить их ко всем жизненно важным объектам инфраструктуры страны. Перехват космических объектов над границей территории государства не годится т.к. космос открыт для всех стран. Необходимо идентифицировать все космические цели. Но выявление враждебных целей не означает необходимость их немедленного перехвата. Необходимо дождаться проявления агрессивности, которая может выявиться только при полете над территорией и на близком расстоянии от стратегически важных объектов инфраструктуры.
Чтобы при этом успеть перехватить цель, проявившую агрессивные намерения, например начавшую снижение или разделившуюся, необходимо стартовые установки перехватчиков расположить как можно ближе ко всем защищаемым объектам (не далее нескольких км). Причем количество перехватчиков у каждого объекта должно быть не меньше, чем ожидаемое число боеголовок (а возможно и ложных целей) на которые разделяется вражеский объект. Ясно, что, при применении больших многотоннажных ракет, это сделать невозможно, т.к. не хватит никаких ресурсов государства для изготовления и содержания крупных и дорогостоящих ракет.
Многотоннажность существующих ракет -перехватчиков обусловлена двумя причинами:
1) необходимостью достижения высоких - гиперзвуковых и даже космических скоростей для перехвата, что требует многоступенчатости;
2) необходимостью иметь достаточную энергию боевой головной части для обеспечения поражения цели при неизбежно ограниченной точности наведения, что предполагает применение боезаряда, радиус действия которого превышает величину промаха.
Из этих условий определяется величина конечной массы потребное количество ступеней, а также отношение стартовой массы к конечной массе. Например, если площадь критической уязвимой части цели составляет 1 м кв., то требуемая плотности распределения готовых поражающих элементов (ГПЭ) после их рассеяния должна составить 1 элемент на метр квадратный. Если вероятный промах системы наведения составляет 10 м, то потребуется 300 ГПЭ. При массе ГПЭ 10 г, требуемая масса боезаряда составит 3 кг. Если коэффициент полезной нагрузки конечной ступени ракеты составляет 50%, то конечная масса ракеты составит 6 кг. Для перехвата космических целей минимальная скорость разгона головной части должна составить не менее 9 м/сек, что примерно соответствует выводу полезной нагрузки на низкую околоземную орбиту (НОО). Для получения такой конечной скорости одноступенчатой ракетой при скорости истечения газов из сопла 3 км/сек потребуется (по формуле Циолковского) стартовая масса ракеты 6*20=120 кг (т.к. число «е»=2,7 в степени, равной отношению конечной скорости к скорости истечения, т.е. 9/3, равно 20). Однако - это в идеале, когда вся служебная масса входит в конечную массу конструкции ракеты, составляющую 3 кг. Если ракета одноступенчатая, то в конечную массу конструкции приходится включать массу топливных баков ЖРД или массу рабочей камеры РДТТ, вмещающую весь объем топлива. Причем перехватчик должен иметь большое стартовое ускорение - как минимум 10 G, чтобы набирать скорость достаточно быстро. Т.е. тяга двигателя должна более чем в 10 раз превышать стартовый вес ракеты. Это делает невозможным достижение космической скорости с одной ступенью. Т.е. ракета должны быть многоступенчатой. Практически делают две - три ступени. Однако это существенно утяжеляет стартовую массу по сравнению с вышеуказанной идеальной. Причем требуются три двигателя, три системы запуска ступеней, три системы управления и две системы расстыковки. И все это -ради боезаряда массой 3 кг. Экономическая оптимизация заставляет при этом увеличить массу боезаряда в несколько раз. Но и при этом стоимость разгона единицы массы до 9 км/сек останется очень высокой. Т.е. задача создания достаточно дешевой и эффективной системы ВКО с максимальным приближением стартовых позиций ракет-перехватчиков ко всем важным элементам инфраструктуры страны с помощь ракет с традиционными ракетными двигателями ЖРД или РДТТ - не решается ни при каких возможных размерах финансирования. Но даже, если такую систему построить, то применение ее, в случае массированного нападения, приведет к разрушениям, соизмеримым с ущербом от средств нападения, против которых система ВКО применяется.
Однако, известна система управления ракеты с многоступенчатым твёрдотопливным двигателем (см. RU 2021113927 A, опуб. 17.11.2022).
Цель изобретения состоит в устранении недостатка конструкции реактивного снаряда-перехватчика, построенного на основе многоступенчатого твердотопливного ракетного двигателя. А именно - ставится задача обеспечения возможности экономичного управления направлением вектора тяги на протяжении всего полета, т.е. обеспечение возможности интенсивного маневрирования при незначительной затрате рабочего тела на маневрирование на всем протяжении полета, включая и наиболее ответственный заключительный этап маневрирования перехватчика в безвоздушной среде. При этом также ставится задача максимально возможной миниатюризации снаряда-перехватчика при сохранении возможности поражения цели, например путем нанесения повреждений, снижающих эффективность действия ее боезаряда.
Предлагается реактивный снаряд-перехватчик, содержащий многоступенчатый ракетный двигатель твердого топлива, состоящий из множества расположенных вдоль общей оси рабочих камер, состыкованных между собой за счет того, что верхняя часть камеры сгорания предыдущей ступени плотно прилегает к внутренней поверхности закритической части сопла следующей ступени. Цель изобретения достигается тем, что на краю закритической части сопла рабочей камеры каждой ступени имеется как минимум три выреза, распределенные по окружности сопла и прикрытые, каждый, расположенными с наружной стороны оболочки сопла рулевыми заслонками, закрепленными, каждая, на оболочке сопла при помощи шарнира, расположенного в верхней части заслонки и обеспечивающего возможность управляемого отклонения заслонки в наружную сторону. Имеется также привод отклонения указанных рулевых заслонок посредством механизма передачи движений, действующего синхронно на заслонки всех ступеней, расположенные на общей вертикали, и не препятствующего свободной расстыковке ступеней. При этом, указанные заслонки выполняют функцию рулей, действие которых основано на том, что сила давления потока газов закритической части сопла на указанные заслонки, прикрывающие вырезанную закритическую часть сопла, при отклонении заслонок уменьшается при увеличении отклонения рулевой заслонки. Это эквивалентно появлению поперечной силы обратного знака, действующей на нижнюю часть ракеты и вызывающей угловое ускорение ракеты по тангажу или рысканию. Максимальная величина этой силы равна силе давления потока газов на вырезанную часть площади закритической оболочки сопла.
В частном варианте конструктивного выполнения рулевые заслонки всех ракетных ступеней многоступенчатого двигателя располагающиеся на одной вертикали, соединены между собой цепью, состоящей из рычагов, выполняющих функцию ограничителей величины возможного открывания заслонок, и проволочных тяг, соединяющих указанные рычаги между собой, а также с сервоэлектроприводом, расположенным на верхней ступени. При этом указанные рычаги взаимодействуют с рулевыми заслонками под углом, обеспечивающим двухстороннюю передачу движения, от рычага к заслонке и от заслонки к рычагу. Причем, соединение звеньев указанной цепи, принадлежащих соседним ракетным ступеням выполнено посредством двух рычагов, соединенных между собой посредством вилки с открытым пазом, ориентированным (относительно оси ракеты) продольно и расположенным на плечах указанных рычагов, движущихся поперечно. Такое соединение обеспечивает сочетание возможности передачи вертикального движения между проволочными тягами соседних ступеней с возможностью беспрепятственного разведения ступеней по вертикали в процессе отделения отработавшей ступени.
Таким образом решается наиболее сложная задача управления -управления ориентацией ракеты по углу курса и тангажа.
Чтобы решить задачу управления креном за счет маршевого двигателя, в частном варианте конструкции, рулевые заслонки, расположенные на одной из вертикалей, прикреплены к поверхности сопла посредством двухосного или шарового (универсального) шарнира, т.е. с возможностью отклонения по углу не только в плоскости, проходящей через ось ракеты, но и в поперечной к оси ракеты плоскости. При этом вводится дополнительный сервопривод управления углом отклонения рулевой заслонки в этой плоскости. Возникновение тангенциальной по отношению к оси ракеты силы при этом объясняется тем, что вектор суммарного давления газов на заслонку практически перпендикулярен поверхности заслонки. Таким образом, по крайней мере, одна из заслонок будет создавать знакопеременную силу, расположенную тангенциально к оси ракеты, что достаточно для управления креном, т.е. для стабилизации ракеты по вращению вокруг своей оси.
В частном варианте конструктивного выполнения, указанный дополнительный привод управления угловым положение рулевой заслонки в поперечной плоскости представляет собой дополнительный механизм, аналогичный вышеописанному, расположенный на наружной поверхности сопла, но взаимодействующий со вторым краем той же рулевой заслонки, закрепленной посредством двухосного шарнира. Таким образом, все рулевые заслонки, расположенные на одной из вертикальных цепочек будут синхронно управляться по двум углам отклонения. При этом однонаправленная компонента отклонения краев указанной заслонки будет работать на управление курсом и тангажем, а дифференциальная компонента - на управление креном.
Согласованное управление указанными углами как минимум трех распределенных по окружности рулевых заслонок, позволяет устанавливать требуемые для управления углы крена, тангажа и рыскания, т.е. обеспечивает полное управление, необходимое для стабилизации и маневрирования ракеты. При этом, в процессе управления, рычаги, расположенные на вышележащих ступенях также совершают вышеуказанные перемещения, синхронно с заслонками нижней, работающей в данный момент времени, ступени. Но они находятся вне потока газов и не испытывают силовых воздействий (кроме небольших сил от воздуха на атмосферном участке полета). Таким образом, требуемая для управления сила не суммируется по ступеням, и обеспечивается возможность управления направлением вектора тяги двигателя, а также ориентацией ракеты по углу крена на всем протяжении полета, включая и внеатмосферный участок, на котором требуется интенсивное маневрирование для перехвата быстролетящих целей. При этом, маневрирование осуществляется за счет маршевого двигателя. Причем расход топлива увеличивается лишь в меру потери величины тяги, создаваемой указанными вырезами сопла, имеющими сравнительно небольшую площадь.
Изобретение поясняется нижеследующим детальным описанием примера конструктивного выполнения и шестью фигурами.
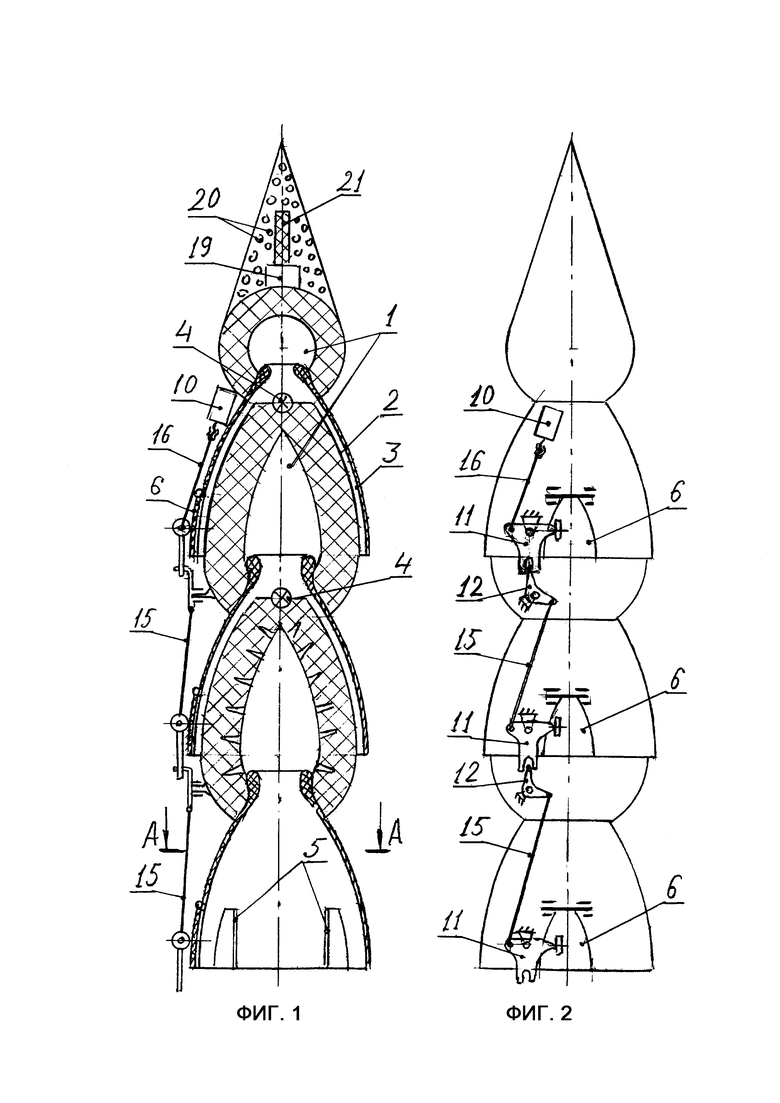
На фиг.1 схематично изображен в разрезе предлагаемый реактивный снаряд-перехватчик.
На фиг.2 изображен внешний вид предлагаемого снаряда со стороны, где видна лишь одна из трех вертикальных линий расположения заслонок по ступеням.
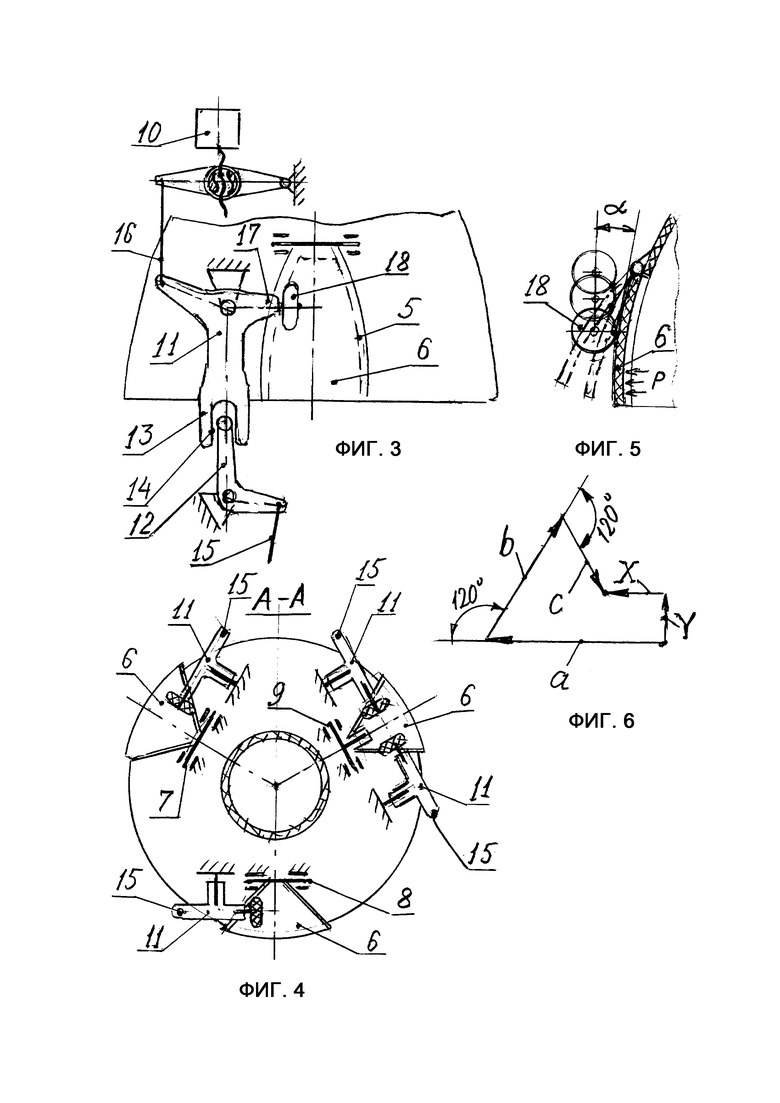
На фиг.3 дано укрупненное изображение рычагов и их соединение между собой и с сервоэлектроприводом.
На фиг.4 изображен разрез поперечной плоскостью А-А, показанной на фиг.1. Показано расположение рулевых заслонок и управляющих ими рычагов и проволочных тяг по окружности.
На фиг.5 проиллюстрировано действие рычага на величину возможного угла отклонения рулевой заслонки. Показана зависимость возможного угла отклонения рулевой заслонки, под действием давления газов, от положения ролика рычага.
На фиг.6 поясняется принцип сложения трех управляющих сил: «а; b; с» с получением двух векторов поперечной силы Χ; Y, определяющих моменты тангажа и курса.
Двигатель ракеты с предлагаемой системой управления содержит множество рабочих камер 1, состыкованных между собой посредством плотного прилегания наружной поверхности 2 камеры сгорания предыдущей ступени с внутренней поверхностью закритической части 3 сопла следующей ступени. При этом образуется стопка из ракетных ступеней, длину и состав которой можно оперативно изменять в зависимости от отдельного полетного задания. Это обеспечивается унификацией размеров и формы стыковочных зон рабочих камер всех ступеней, а также наличием заготовленного набора (магазина) ступеней разных параметров по тяге и времени горения. В огневом днище всех ступеней, кроме последней, имеется механизм 4 передачи горения в вышележащую ступень, инициируемый на заключительном этапе выгорания топлива предыдущей ступени. Это может быть или прорывная мембрана, обнажаемая при утоньшении слоя твердого топлива, или клапан перепуска горячих газов в вышележащую камеру сгорания, открываемый автоматическим устройством по сигналу датчика уменьшения перегрузки ракеты или по сигналу внебортового источника, поступающему, например, по радиоканалу.
На краю оболочки закритической части сопла каждой ступени имеются как минимум три выреза 5, (см. фиг.1 и 3) распределенные по окружности среза сопла. Указанные вырезы прикрыты рулевыми заслонками 6, прикрепленными к наружной поверхности сопла посредством шарниров 7, 8 и 9 (см. фиг.4). Причем шарниры 7 и 8 являются цилиндрическими (одноосными), т.е. имеют каждый лишь по одной оси вращения, чем обеспечивается лишь одна степень подвижности заслонки. А шарнир 9 - двухосный, обеспечивающий возможность отклонения заслонки по двум углам, а именно в плоскости, проходящей через продольную ось ракеты, а также в поперечной плоскости.
Отклонения заслонок ограничиваются механизмами, состоящими из системы рычагов и проволочных тяг, связывающих заслонки с четырьмя сервоэлектроприводами 10, расположенными на верхней ракетной ступени. Действие этих механизмов состоит в управлении ограничителями величины возможного открывания рулевых заслонок 6. При этом должна обеспечиваться двусторонняя передача движения - как от ограничителя к заслонке так и от заслонки к ограничителю. Это обеспечивается выбором геометрических параметров механизма связи ограничителя с заслонкой. Причем механизмы заслонок, расположенных на одной вертикали действуют синхронно.
В частном конструктивном варианте механизм, на участке, являющимся промежуточным между соседними ступенями, содержит трехплечий рычаг 11 (см. фиг.2 и 3) установленный на нижнем крае рабочей камеры ракетной ступени, и двуплечий рычаг 12, установленный на корпусе рабочей камеры нижележащей ступени вблизи указанного трехплечего рычага 11. Условие двусторонности передачи движений между трехплечим рычагом 11 и рулевой заслонкой 6 обеспечивается тем, что угол «а» между плоскостью вращения рычага 11 и касательной к поверхности рулевой заслонки выбирается больше, чем угол трения рычага 11 с поверхностью заслонки (см. фиг.5). Причем указанные трехплечий и двуплечий рычаги соседних ступеней связаны между собой посредством вилки 13, открытый паз 14 которой ориентирован в продольном (отн. оси ракеты) направлении. Указанные двуплечий 12 и трехплечий 11 рычаги соседних ступеней соединены проволочными тягами 15 с аналогичными механизмами соответственно нижележащей и вышележащей ступеней. Тяга 16 последней ступени соединена с сервоэлектроприводом 10 (см. фиг.2 и 3). Таким устройством обеспечивается двухсторонняя передача силы натяжения проволочных тяг по всей вертикальной цепочке расположения ступеней. И при этом обеспечивается возможность беспрепятственного разделения ступеней в полете.
Плечо 17 каждого трехплечего рычага 11 служит ограничителем отклонения рулевой заслонки и снабжено на конце роликом 18, служащим для уменьшения трения (см. фиг.3). Причем нижняя ступень также снабжена трехплечим рычагом, т.к. его третье плечо с вилкой может быть задействовано при наращивании числа ступеней, например в случае необходимости перехвата более скоростной и более высотной цели.
Рулевые заслонки 6, прикрепленные одноосными шарнирами 7 и 8 (фиг.4), имеют лишь по одному рычагу 11, ограничивающему угол отклонения заслонки в поперечной плоскости. А рулевая заслонка с двухосным шарниром 9 крепления снабжена двумя рычагами 11, что соответствует двум степеням подвижности данной заслонки (см. фиг.4). При этом синхронная компонента отклонения двух рычагов 11 такой заслонки контролирует ход возможного отклонения заслонки в продольной плоскости, проходящей через ось ракеты, а дифференциальная компонента контролирует отклонение заслонки в поперечной к оси ракеты плоскости. Такое отклонение соответствует появлению плеча силы давления газов на заслонку, т.е. появление момента, создающего вращение ракеты вокруг своей оси. Это используется для управления ракеты по углу крена.
Сервоэлектроприводы 10 расположены во впадине на поверхности рабочей камеры верхней ступени. Для уменьшения аэродинамического сопротивления рычаги по возможности располагаются параллельно поверхности рабочих камер. Дополнительно все механизмы могут быть прикрыты кожухом (кожух не показан).
В головной части ракеты кроме маршевого двигателя расположен блок 19 управления ракеты, а также приемники сигналов управления и позиционирования ракеты, или автономная система навигации и управления. Также имеется боевая часть, которая, в частном случае может представлять собой множество расположенных под обтекателем готовых поражающих элементов (ГПЭ) 20, снабженным пороховым зарядом 21, служащим для рассеяния ГПЭ и срабатывающим при заданном расстоянии до цели, определяемом бортовым датчиком сближения с целью или внешней системой слежения за полетом.
Функционирует предлагаемый снаряд-перехватчик следующим образом. Инициируя зажигание нижней ступени, производят старт из трубчатой направляющей (минометный старт). При этом сразу в работу вступает система управления, действие которой заключается в стабилизации или изменении ориентации продольной оси ракеты по углам курса, тангажа и крена при помощи изменения углов отклонения заслонок 6 нижней ступени по всем располагаемым степеням свободы, ограничиваемым шарнирами 7, 8 и 9. Указанные отклонения заслонок 6 производятся путем продольного перемещения четырех цепочек проволочных тяг с помощью сервоэлектроприводов 10. При этом севоэлектропривод 10 влияет лишь на ограничение угла возможного отклонения каждой рулевой заслонки 6, а само отклонение рулевой заслонки осуществляется под действием давления Ρ газов в закритической части сопла (см. фиг.5). Давление газов на заслонки 6 имеет место как за счет недорасширения газов в закритической части сопла, так и за счет кривизны стенки закритической части сопла, вызывающей уменьшение конуса расходимости потока газов. Причем, когда заслонка 6 отклоняется, давление газов на нее уменьшается, вплоть до нуля, т.к. заслонка при этом уменьшает степень отклонения потока газов, выходящих из соответствующего выреза 5 сопла. Уменьшение давления на заслонку 6 эквивалентно появлению поперечной силы противоположного направления, т.е. эквивалентно отклонению вектора тяги работающей ступени твердотопливного двигателя.
В рассматриваемом случае, использование четырех каналов управления для управления тремя моментами - по курсу, тангажу и крену, имеет одну степень избыточности. Эта избыточность проявляется в виде возможности получать требуемые компоненты X и Υ вектора (см. фиг.6) при разных длинах трех векторов «а», «b» и «с», расположенных между собой под углом 120 градусов. Однако эта избыточность необходима, т.к. заслонки 6, в отличие от обычных рулей, не могут создавать знакопеременную поперечную (к оси ракеты) силу.
Четвертая цепочка стержней необходима для создания управляемой тангенциальной силы, используемой для управления по крену, т.е. для управления вращением ракеты вокруг своей оси. Тангенциальная сила, в отличие от поперечной радиальной силы - знакопеременна. Это позволяет управлять вращением ракеты вокруг своей оси за счет маршевых двигателей, что позволяет отказаться от использования каких либо дополнительных двигателей малой тяги или маховичных моментных двигателей ориентации.
Когда топливо нижней твердотопливной ступени подходит к полному выгоранию, тяга уменьшается, и это может служить сигналом к срабатыванию механизма передачи горения в вышележащую ступень. Например при утоньшении слоя твердого топлива может прорываться мембрана механизма 4. При этом пламя прорывается в вышестоящую камеру сгорания и производит зажигание. В вышележащей камере появляется давление, которое выталкивает нижележащую отработавшую ступень. При этом двуплечий и трехплечий рычаги соседних ступеней, соединенные между собой вилкой 13 с открытым пазом 14, свободно расцепляются, и функционирование системы управления автоматически передается на вышележащую ступень без перерывов, т.к. отделение нижележащей ступени происходит в момент, когда в рабочей камере вышележащей ступени уже имеется давление, за счет которого и происходит разделение ступеней.
Задача перехвата цели облегчается за счет увеличенного радиуса разлета ГПЭ 20, которым можно управлять, меняя расстояние до цели при подрыве рассеивающего заряда 20. При этом, за счет высоких гиперзвуковых скоростей относительного движения снаряда и цели ГПЭ работают, как кинетическое оружие. При этом кинетическая энергии ГПЭ многократно превышает энергию химических связей любого материала. Кинетическая энергия ГПЭ, за счет большой скорости, не успевает рассеваться в материале на большое расстояние от оси канала и действует, аналогично действию кумулятивного боеприпаса, который может пробить любую броню и любую боеголовку насквозь, нарушая функционирование боеголовки. В частности при этом возможно нештатное срабатывание ядерного заряда боеголовки, ведущее к ассиметричной имплозии с уменьшением силы взрыва. Кроме того, эффективность атаки уменьшается из за недолета боеголовки до цели.
Таким образом предлагаемый снаряд по эффективности и радиусу поражения не уступает крупным многоступенчатым ракетам. Простота конструкции, а также уменьшение размерности ракеты позволит уменьшить затраты на создание сплошной, т.е. распределенной по всей территории, воздушно-космической обороны, рассчитанной также на массированное нападение, усложненное большим числом ложных целей. Кроме того, малоразмерный, а следовательно и дешевый в массовом производстве, реактивный снаряд-перехватчик допускает повышенное число промахов, как это имеет место в артиллерии, где снаряды существенно дешевле многоступенчатых ракет.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ РАКЕТЫ С МНОГОСТУПЕНЧАТЫМ ТВЁРДОТОПЛИВНЫМ ДВИГАТЕЛЕМ | 2021 |
|
RU2804562C2 |
| КИНЕТИЧЕСКАЯ БОЕГОЛОВКА С АЭРОДИНАМИЧЕСКИМ НАВЕДЕНИЕМ | 2022 |
|
RU2825027C2 |
| ГИПЕРЗВУКОВОЙ РЕАКТИВНЫЙ СНАРЯД | 2020 |
|
RU2754475C1 |
| СПОСОБ НАВЕДЕНИЯ ПРОТИВОРАКЕТЫ НА СВЕРХЗВУКОВУЮ ЦЕЛЬ | 2022 |
|
RU2825905C2 |
| КИНЕТИЧЕСКАЯ РАКЕТНО-КОСМИЧЕСКАЯ СИСТЕМА ВООРУЖЕНИЯ | 2020 |
|
RU2752730C1 |
| СПОСОБ НАВЕДЕНИЯ ПРОТИВОРАКЕТЫ | 2021 |
|
RU2814291C2 |
| РАКЕТНЫЙ ДВИГАТЕЛЬ | 2019 |
|
RU2749235C2 |
| РАКЕТНЫЙ ДВИГАТЕЛЬ НА СЫПУЧЕМ ТОПЛИВЕ | 2019 |
|
RU2781320C2 |
| ДИСТАНЦИОННО УПРАВЛЯЕМОЕ БОЕВОЕ УСТРОЙСТВО | 2022 |
|
RU2826654C2 |
| РАКЕТНАЯ ДВИГАТЕЛЬНАЯ УСТАНОВКА | 2019 |
|
RU2781319C2 |
Изобретение относится к вооружению, а именно к реактивному снаряду-перехватчику. Реактивный снаряд-перехватчик содержит многоступенчатый ракетный двигатель твердого топлива, состоящий из множества расположенных вдоль общей оси рабочих камер, состыкованных между собой за счет того, что верхняя часть камеры сгорания предыдущей ступени плотно прилегает к внутренней поверхности закритической части сопла следующей ступени. На краю закритической части сопла рабочей камеры каждой ступени имеется как минимум три выреза, распределенные по окружности сопла и прикрытые каждый расположенными с наружной стороны оболочки сопла рулевыми заслонками, закрепленными на оболочке сопла при помощи шарнира, расположенного в верхней части заслонки и обеспечивающего возможность управляемого отклонения заслонки в наружную сторону. Имеется также привод отклонения указанных заслонок посредством механизмов передачи движений, действующих синхронно на расположенные на общей вертикали заслонки всех ступеней и не препятствующих свободной расстыковке ступеней. Рулевые заслонки всех ракетных ступеней многоступенчатого двигателя, располагающиеся на одной вертикали, соединены между собой цепью, состоящей из рычагов, выполняющих функцию ограничителей величины возможного открывания заслонок, и проволочных тяг, соединяющих указанные рычаги между собой, а также с сервоэлектроприводом, расположенным на верхней ступени. Соединение звеньев указанной цепи, принадлежащих соседним ракетным ступеням, выполнено посредством двух рычагов, соединенных между собой посредством вилки с открытым пазом, ориентированным относительно оси ракеты продольно и расположенным на плечах указанных рычагов, движущихся поперечно. Плоскость вращения рычагов, выполняющих функцию ограничителя открывания заслонок расположена по отношению к поверхности заслонки под углом, большим угла трения. Рулевые заслонки, расположенные как минимум на одной из вертикалей, прикреплены к поверхности сопла посредством двухосного шарового шарнира, т.е. с возможностью отклонения по углу не только в плоскости, проходящей через ось ракеты, но и в поперечной к оси ракеты плоскости, и они связаны с двумя независимыми сервоэлектроприводами, воздействующими на соответствующие два края одной заслонки. Технический результат заключается в обеспечении возможности управления направлением вектора тяги на протяжении всего полета ракеты. 6 ил.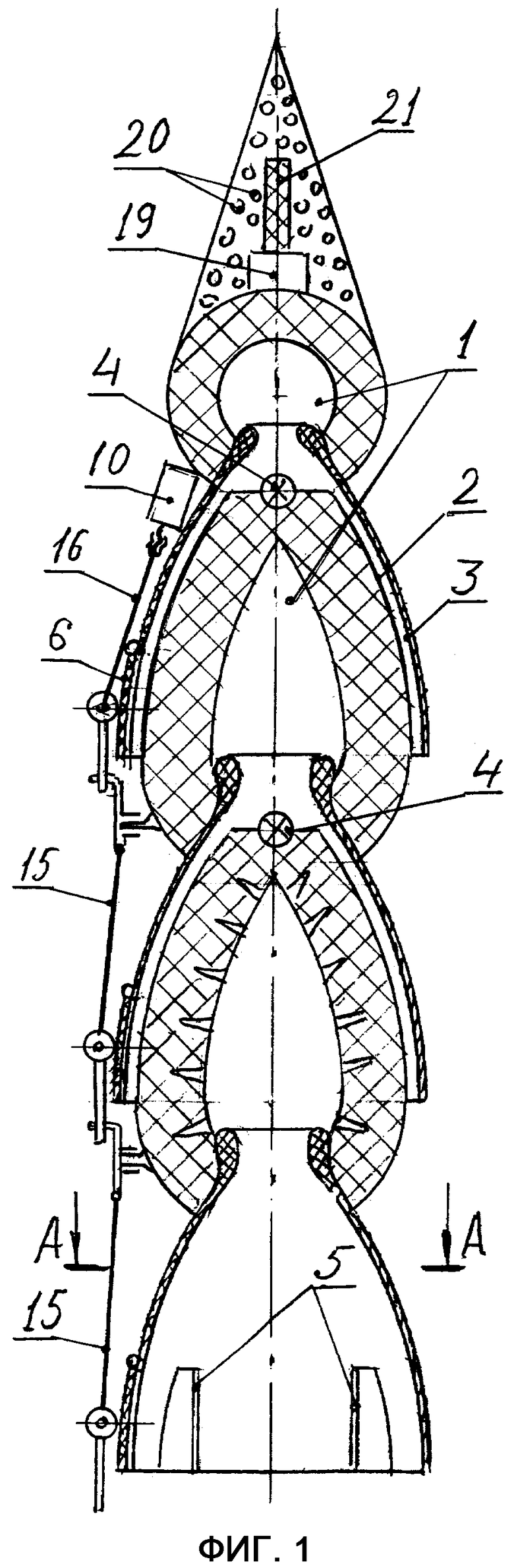
Реактивный снаряд-перехватчик, содержащий многоступенчатый ракетный двигатель твердого топлива, состоящий из множества расположенных вдоль общей оси рабочих камер, состыкованных между собой за счет того, что верхняя часть камеры сгорания предыдущей ступени плотно прилегает к внутренней поверхности закритической части сопла следующей ступени, при этом на краю закритической части сопла рабочей камеры каждой ступени имеется как минимум три выреза, распределенные по окружности сопла и прикрытые каждый расположенными с наружной стороны оболочки сопла рулевыми заслонками, закрепленными на оболочке сопла при помощи шарнира, расположенного в верхней части заслонки и обеспечивающего возможность управляемого отклонения заслонки в наружную сторону, и имеется также привод отклонения указанных заслонок посредством механизмов передачи движений, действующих синхронно на расположенные на общей вертикали заслонки всех ступеней и не препятствующих свободной расстыковке ступеней, отличающийся тем, что рулевые заслонки всех ракетных ступеней многоступенчатого двигателя, располагающиеся на одной вертикали, соединены между собой цепью, состоящей из рычагов, выполняющих функцию ограничителей величины возможного открывания заслонок, и проволочных тяг, соединяющих указанные рычаги между собой, а также с сервоэлектроприводом, расположенным на верхней ступени, причем соединение звеньев указанной цепи, принадлежащих соседним ракетным ступеням, выполнено посредством двух рычагов, соединенных между собой посредством вилки с открытым пазом, ориентированным относительно оси ракеты продольно и расположенным на плечах указанных рычагов, движущихся поперечно, а плоскость вращения рычагов, выполняющих функцию ограничителя открывания заслонок расположена по отношению к поверхности заслонки под углом, большим угла трения, причем расположенные, как минимум на одной из вертикалей, рулевые заслонки прикреплены к поверхности сопла посредством двухосного шарового шарнира, т.е. с возможностью отклонения по углу не только в плоскости, проходящей через ось ракеты, но и в поперечной к оси ракеты плоскости, и они связаны с двумя независимыми сервоэлектроприводами, воздействующими на соответствующие два края одной заслонки.
| RU 2021113927 A, 02.10.2023 | |||
| ГИПЕРЗВУКОВОЙ РЕАКТИВНЫЙ СНАРЯД | 2020 |
|
RU2754475C1 |
| РЕАКТИВНАЯ МНОГОСТУПЕНЧАТАЯ ДВИГАТЕЛЬНАЯ УСТАНОВКА | 1994 |
|
RU2082896C1 |
| US 7000377 B1, 21.02.2006 | |||
| US 2010011742 A1, 21.01.2010. | |||
