Изобретение касается систем противовоздушной обороны (ПВО) и может быть применено в системах перехвата маневрирующих атмосферных сверхзвуковых и гиперзвуковых летательных аппаратов, например самолетов, крылатых ракет, планирующих боевых блоков, управляемых реактивных снарядов, включая малоразмерные и малозаметные для радиолокации цели.
Всякая система ПВО представляет собой неразрывное единство двух частей: информационной и исполнительной. Информационная часть представлена техническими средствами наблюдения окружающей воздушной обстановки, обнаружения и классификации воздушных объектов и измерения параметров их движения. В современных информационных системах ПВО используются радиотехнические, оптические и акустические средства локации. В исполнительной части современной ПВО используются различные управляемые летательные аппараты, среди которых преобладающее преимущество по комплексу существенных технических параметров принадлежит ракетам. Они превосходят самолеты по скорости, ускорению, дальности, компактности базирования, унивесальности по параметрам среды использования и др. При этом для ракеты - перехватчика (далее - противоракеты) особенно важными являются высокие конечная скорость и ускорение, а также - малое время выхода в зону перехвата цели. Это достигается малоразмерностью противоракеты в сочетании с ее многоступенчатостью или иным способом осуществления частого отбрасывания отработавшей массы конструкции. При этом конечную скорость противоракеты можно подсчитать по формуле Циолковского:

где M0 - стартовая масса ракеты, Мк - конечная масса ракеты, Vконечн. - конечная (орбитальная) скорость ракеты, Vистечения - скорость истечения газов из сопла, которая должна быть в этой формуле заменена на среднюю скорость квазинепрерывного отбрасывания массы топлива и частей конструкции (баков, теплозащитыи др.).
Если допустить, что масса конструкции пренебрежимо мала по сравнению с массой топлива, то для ракетного топлива со скоростью истечения 3 км/сек и конечной скорости противоракеты 9 километров в секунду мы получим по указанной выше формуле отношение стартовой массы к конечной массе равное 20.
Примером технических решений, допускающих малоразмерность в сочетании с возможностью значительного увеличения числа ступеней являются: изобретения по авторскому свидетельству СССР №1519279 и по патенту РФ на изобретение №2754475. В указанных технических решениях ракета представляет собой продольный пакет из множества твердотопливных ступеней, состыковнных между собой за счет вложения камер сгорания предыдущих ступеней в закритическую часть сопла последующей ступени без дополнительного скрепления. Выгорание топлива предыщей ступени вызывает автоматическую передачу горения в следующую стунень и выталкивание выгоревшей ступени давлением газов вопламенившегоя топлива следующей ступени. Таким образом осуществляется частое отбрасывание отработавшей массы конструкции, почти пропорциональное расходу твердого топлива, без перерыва тяги и управления. При этом, уже при числе ступеней 5, обеспечивается возможность достижения первой космической конечной скорости ракеты при отношении стартовой массы к конечной массе около 25. Т.е. противоракета со стартовой массой 25 килограмм может разогнать конечную массу 1 килограмм до скорости 9 километров в секунду. При этом ускорение такой малоразмерной противоракеты может доходить до нескольких десятков G (G=10 м/сек). Это позволяет например произвести перехват баллистической ракеты на активном участке ее полета со стартовой позиции противоракет, расположенной за несколько сотен километров от места старта баллистической ракеты. При этом наведение может быть произведено с использованием оптической ГСН (головка самонаведения), работающей по излучению ракетных двигателей цели, что конструктивно наиболее просто.
Другой вариант осуществления малоразмерной противоракеты, отличающийся частым (квазинепрерывным) отбрасываением отработавшей массы конструкции представлен в патентах РФ на изобретение №2749235, №2752730, а также в заявке РФ на изобретение №2019128485. В этом техническом решении применяется твердое смесевое топливо в дисперсном сыпучем состоянии. При этом топливо подается в камеру сгорания двигателя с помощью шлюзового механизма, который не требует мощного привода, и работает, как и всякий шлюз, за счет небольшого встречного потока газов из камеры сгорания, в которую топливо подается против перепада давления. Электродвигатель при этом нужен только для компенсации потерь на трение уплотнений ротора шлюзового механизма. Причем обечайка топливного бункера разделена на кольцеобразные секции, а единственный ракетный двигатель установлен на днище бункера, который вдвигается в обечайку по мере расходования топлива, как поршень - за счет силы тяги двигателя. При этом, опускающиеся ниже двигателя кольцевые секции обечайки теряют связь с обечайкой и отпадают. Наличие в данном варианте сервоэлектроприводов несколько ограничивает малоразмерность по сравнению с предыдущим вариантом. Однако отношение стартовой массы к конечной массе для достижения скорости 9 километров в секунду остается таким же - примерно 25. При конечной массе 4 кг стартовая масса получится примерно 100 кг, что тоже приемлемо для противоракеты по условию получения достаточно больших ускорений (масштабирование изменяет соотношение между массой и прочностью).
Однако применение вышеуказанных малоразмерных противоракет для перехвата воздушных целей сталкивается с проблемами, обусловленными малой массой боевой части, которая может быть размещена в головной части малоразмерной противоракеты. Решение в принципе может быть найдено путем использования высокой конечной скорости для кинетического поражающего действия. Однако при этом требуется высокая точность локации цели. Применение бортовой радиолокационной ГСН осложняется недостатком места для размещения антенны с достаточно узкой диаграммой направленности. Применение многопозиционной наземной радиолокации, которая могла бы решить проблему повышения точности при большой дальности, требует создания сложной распределенной по большой территории наземной инфраструктуры, уязвимой к средствам подавления. Применение оптических систем локации воздушных целей ограничивается облачностью, которая часто ограничивает дальность оптической локации и создает возможность вражеским целям лететь под прикрытием облаков на значительные расстояния.
Наличие этой проблемы заставляет обратить внимание на акустические информационные системы, которые в современную эпоху сверхзвуковых полетов вновь приобретают актуальность. Известны например технические решения, позволяющие определить расположение точки выстрела снаряда или пули с помощью нескольких акустических датчиков, закрепленных в нескольких точках по некоторой базовой конфигурации (см. патент РФ на изобретение №2512128 разработки США). В другом варианте определяется ориентация фронта прохождения ударной волны и пеленг на траекторию пролета сверхзвуковой цели над поверхностью земли с помощью нескольких разнесенных трехкоординатных акселерометров (см.патент на изобретение РФ №2408025 разработки США).
Однако, недостатком указанных технических решений является то, что, если цель способна хоть немного непредсказуемо маневрировать, то расположение цели на момент перехвата может отличаться от вычисленного по полученным данным, и точное попадание в цель будет невозможно, и для перехвата придется применять боевую часть большой мощности, которая не может быть размещена на малоразмерной ракете. Крупнотоннажная же противоракета не имеет (по условиям прочности конструкции) достаточного для перехвата высокоманевренной цели ускорения и маневренности.
Таким образом, известные технические решения не содержат сведений о том, как построить замкнутую систему наведения на высокоскоростную, например гиперзвуковую, а также высокоманевренную, цель, т.е. - как построить полную систему ПВО - наземную или бортовую, действующую по высокоманевренным сверхзвуковым целям без промаха, т.е. без необходимости применения мощной боевой части противоракеты.
Предметом предлагаемого изобретения является устранение указанного недостатка известных технических решений и обеспечение возможности перехвата маневрирующей сверхзвуковой (в частности гиперзвуковой) цели на основе акустической локации ее по создаваемой целью ударной волне в процессе полета через атмосферу.
Предлагается способ наведения противоракеты на сверхзвуковую цель, использующий регистрацию создаваемой сверхзвуковой целью ударной волны. Цель изобретения достигается тем, что датчик ударной волны располагают на борту противоракеты, которую пилотируют, отслеживая положение фронта ударной волны относительно противоракеты и используя поверхность фронта ударной волны в качестве навигационной направляющей. При этом положение и ориентация поверхности фронта ударной волны определяется по пространственным и временным координатам факта пересечения фронта ударной волны бортовым датчиком, установленным на противоракете. Эти координаты являются точкой, принадлежащей поверхности ударной волной. При этом поверхность фронта ударной волны, является, как известно, поверхностью Маха, характеризующей процесс сверхзвукового обтекания цели (см. Н.Ф. Краснов, Аэродинамика, часть 1, стр. 154. Москва, Высшая школа, 1980 г.) и имеет, в общем случае, вид конуса с криволинейными образующими и с вершиной, жестко связанной с носовой частью цели. Определив таким образом, т.е. путем нескольких пересечений, координаты нескольких точек поверхности, можно определить форму, положение и пространственную ориентацию конической поверхности Маха, а следовательно - и координаты вершины конуса, в которой расположена цель. Это имеет место в случае, если цель не маневрирует и если конус имеет правильную форму. Таким образом, пространственно-временное положение цели будет определено без использования средств радио или оптической локации.
Если же цель маневрирует, то конус поверхности Маха будет искривленным. Однако это искривление, вследствие ограниченности маневренных возможностей цели, будет небольшим. Если после сближения с целью повторить определение формы и положения конуса Маха путем дополнительного пересечения траектории противоракеты с фронтом ударной волны, то ошибка, обусловленная маневрированием цели, уменьшится. Таким образом, путем неоднократной корректировки расчетов положения вершины конуса, ошибка расчетного определения положения цели в процессе сближения противоракеты с целью, будет уменьшаться и может достигнуть величины, меньшей суммы диаметров цели и противоракеты. Таким образом, произойдет прямое столкновение с целью, т.е. ее разрушение или отклонение от объекта атаки. Двигаясь вдоль поверхности фронта ударной волны в направлении полета цели, т.е. двигаясь за целью в догоняющем режиме и со скоростью, превышающей скорость цели, противоракета неизбежно придет в вершину конуса, т.е. в точку расположения цели и столкнется с ней. Таким образом, будет обеспечено наведение с точностью, достаточной для кинетического поражения цели, т.е. без использования боезаряда. Учитывая вышеуказанную возможность достижения малоразмерной противоракетой скоростей, значительно превышающих скорость полета целей в атмосфере (даже, если скорость цель гиперзвуковая), то скорость столкновения противоракеты с целью будет достаточной для разрушения цели с эффективностью, превышающей эффективность кумулятивных боеприпасов. Более низкие скоростные возможности цели по сравнению с возможностями противоракеты, обусловлены наличием у цели полезной нагрузки в виде боезаряда. Если же цель не несет боезаряд, т.е. является, как и противоракета, оружием кинетического действия, то она не несет большой опасности, какую несут боеголовки осколочно-фугасного, ядерного или иного действия на расстоянии. Боеголовки кинетического действия достаточно просто отклонить от точного попадания в цель. Для этого достаточно небольшой скорости столкновения с противоракетой. В любом случае процесс перехвата цели по предлагаемому способу оказывается менее разрушительным для окружающей обстановки, т.к., либо цель уничтожается на значительном расстоянии до объекта атаки, либо не несет в себе взрывчатый боезаряд, и просто отклоняется от попадания в объект атаки, если цель кинетическая.
Факт пересечения волнового фронта ударной волны противоракетой может быть опознан по скачкообразному изменению давления атмосферного воздуха. При этом направление пересечения фронта, т.е. - входа в полость конуса Маха или выхода из него, определяется по изменению уровня акустического фона, т.к. внутри конуса Маха к акустическому фону окружающей среды добавляется фон турбулентности, создаваемой процессом обтекания цели, а также работой двигателя цели. Вне конуса Маха эта составляющая фона отсутствует.
Проблема состоит в том, как замерить это давление, т.к. оно характеризует состояние невозмущенной части набегающего потока. Если поставить трубку Пито, используемую на самолетах для измерения воздушной скорости, то мы будем замерять давление остановленного потока. В данном случае, учитывая гиперзвуковую скорость полета противоракеты, это будет давление прямого скачка уплотнения, которое не только многократно превышает давление в невозмущенной части набегающего потока, но и сопровождается сильным скачком температуры, а также диссоциацией газов и световым излучением. Впрочем, все эти параметры воздуха в зоне прямого скачка уплотнения однозначно связаны с давлением этой же струйки потока в невозмущенной его части. И любой из параметров состояния воздуха в прямом скачке уплотнения может быть использован для пересчета в давление невозмущенной среды, как статическое, так и имульсное и звуковое (акустическое). Таким образом, замеряя давление, или температуру, или плотность газа, или интенсивность или спектральные характеристики оптического излучения газа в прямом скачке уплотнения, мы получим информацию об изменении давления невозмущенной атмосферы в той части струйки потока, которая попадает в точку прямого скачка уплотнения.
Аналогичная однозначная связь с параметрами невозмущенного потока существует и при расположении датчика в косом скачке уплотнения или в любой точке поверхности противоракеты. Эта связь определяется картиной обтекания летательного аппарата сверхзвуковым потоком. Однако, при установке датчика на поверхности фюзеляжа, имеющего заостренную головную часть, имеется некоторая неопределенность в распределении струек потока по разным сторонам от острия. При этом, небольшие отклонения противоракеты по тангажу, курсу или крену могут переключать струйки по разным сторонам фюзеляжа. Таким образом, положение точки пересечения датчика с фронтом ударной волны будет определяться с погрешностью, равной поперечному диаметру фюзеляжа. Устранить этот недостаток можно, разместив датчик на выносном штативе с вынесением точки забора воздуха в невозмущенный поток. При этом, как и в случае с трубкой Пито, датчик можно снабдить собственным обтекателем малого размера, что даст соответствующее уменьшение величины погрешности, обусловленной рассечением потока заостренной вершиной с разнесением соседних струек потока по разным сторонам обтекателя малого размера.
Чтобы уменьшить требуемое число циклов пересечения противоракеты с поверхностью фронта ударной волны, необходимое для определения угловой ориентации фронта ударной волны, следует установить на борту противоракеты несколько - по крайней мере два, пространственно разнесенных датчика ударной волны. Тогда за одно пересечение противоракетой конуса Маха мы получим сразу несколько пространственно-временных координат поверхности Маха. При этом за одно пересечение можно будет определить не только координаты одной точки поверхности Маха, но и ее угловую ориентацию в окрестности данной точки, и даже тензор кривизны поверхности конуса на заключительном этапе сближения с целью, когда радиус поперечной кривизны конуса достаточно мал. Это сокращает необходимое число пересечений поверхности фронта ударной волны, выполняемое путем маневрирования противоракеты.
При чем, если стабилизировать угол крена противоракеты относительно земли, например измеряя его по поляризации принимаемых сигналов радиомаяков или с помощью гироскопа, то для измерения угла наклона поверхности фронта ударной волны достаточно иметь два разнесенных бортовых датчика фронта ударной волны.
В процессе приближения к цели, интенсивность скачков давления от ударной волны, а также интенсивность акустической турбулентности, заполняющей конус Маха, возрастает, что упрощает процесс регистрации координат пересечения противоракеты с конусом Маха и уменьшает влияние возможных помех от посторонних источников, например от других целей. На начальных этапах сопровождения цели противоракета может пилотироваться по данным внешних радиолокационных систем, т.к. при этом не требуется высокой точности, а удальность от наземной инфраструкты ПВО еще невелика. Предлагаемый способ определения координат цели потребуется главным образом на заключительном этапе наведения, когда требуется высокая точность локации, трудно достижимая средствами радиолокации, а оптическая локация ограничена облачностью.
Поскольку координаты точек поверхности фронта ударной волны являются координатами движения самой противоракеты в момент пересечения ее с фронтом ударной волны, то координаты противоракеты должны быть известны - по крайней мере на начальных этапах захвата цели противоракетой и до момента выхода на режим отслеживания фронта ударной волны в режиме малых отклонений. Для этого, на начальных этапах наведения, пилотирование противоракеты может производится с использованием обычных внешних навигационных систем позиционирования, например с помощью системы радиомаяков, установленных на земле. Применение радиомаяков, установленных на спутниках (ГЛОНАС и т.п.) следует считать, в условиях глобального противостояния, ненадежным.
Кроме того, при пилотировании противоракеты путем отслеживания положения конического фронта ударной волны, имеется проблема управления противоракеты по углу курса. Если просто задать направление полета в сторону вершины конуса, то в процессе приближения противоракеты к вершине конуса траектория движения будет принимать характер винтовой линии со все уменьшающимся шагом винта, что приведет к исчерпанию маневренных возможностей противоракеты по поперечному ускорению и к отрыву от поверхности конуса Маха. Избежать этого можно, если в процессе пилотирования поддерживать постоянным угол крена противоракеты относительно земли, а также постоянно контролировать поперечный наклон поверхности ударной волны относительно противоракеты. При этом, в случае обнаруженного нарастания поперечного наклона фронта ударной волны относительно противоракеты, следует производить отклонение противоракеты по курсу в сторону, соответствующую, как бы, скатыванию с горки на косогоре. При таком управлении курсом противоракета будет придерживаться траектории, близкой к образующей конуса Маха и не будет уходить в винтовую траекторию. Т.е. будут устранены проблемы с нарастанием перегрузок, сопровождающих приближение противоракеты к вершине конуса.
Изобретение поясняется нижеследующим детальным описанием примера выполнения и тремя фигурами.
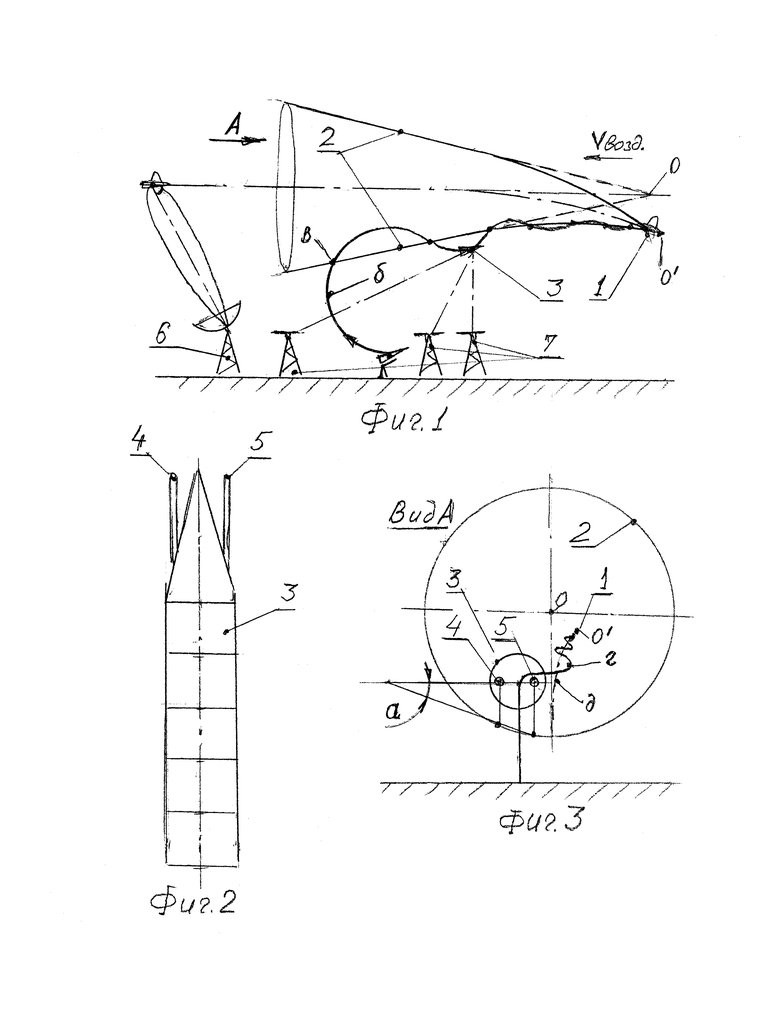
На фиг. 1 проиллюстрирован пример предлагаемого способа наведения, а именно - изображена цель 1 в системе координат, движущейся вместе с целью. Изображена также поверхность фронта ударной волны 2 в определенный момент времени. Поверхность ударной волны 2 в данном примере имеет вид конуса, искривленного в зоне приближения к вершине, что обусловлено маневрированием цели. При этом поверхность 2 остается на фиг. 1 почти неподвижной, т.к. скорость сдува ее набегающим потоком воздуха влево компенсируется распространением фронта звуковой волны под углом вправо. Вершина конуса остается на фиг. 1 неподвижной и совмещенной с неподвижной целью 1. Смещаются влево только искривления конуса. Vвозд. Обозначает скорость воздушного потока, которая обратна по знаку так называемой воздушной скорости цели. Показано два конуса ударной волны - идеальный и искривленный. Показана траектория маневрирования противоракеты 3 в вертикальной плоскости.
На фиг. 2 показан пример возможного размещения двух датчиков 4 и 5 фронта ударной волны на борту противоракеты 3.
На фиг. 3 изображен вид по стрелке А, показанной на фиг. 1. Показана траектория маневрирования противоракеты по курсу в процессе отслеживания искривленной образующей реальной поверхности конуса Маха с вершиной в точке O/. Обозначен угол «а» поперечного наклона фронта ударной волны, измеряемый датчиками 4 и 5 по разности времени пересечения ими фронта ударной волны в процесс движения оси пртиворакеты по вертикали.
Предлагаемой способ наведения состоит в следующем. Предварительные параметры полета цели 1 определяются обычным средствами обнаружения, например радиолокатором 6, расположенным на передней линии системы ПВО. Координаты противоракеты 3 на начальном этапе захвата цели и сопровождения, определяются триангуляцией с помощью системы радиомаяков 7, разнесенных между собой на некоторые базовые расстояния по треугольнику. Угловые текущие параметры положения противоракеты по тангажу, курсу и крену, с целью упрощения и компактизации бортового оборудования, могут измеряться по поляризации принимаемых радиосигналов маяков 7 с помощью расположенной на борту противоракеты векторной антенны, состоящей из трех взаимно ортогональных диполей. Однако могут быть применены и гироскопы, если удастся сделать их достаточно компактными для установки на малоразмерной противоракете.
Учитывая, что на фиг. 1 дано изображение в движущейся относительно земли системе координат, в которой цель 1 неподвижна, процесс разгона противоракеты после старта выглядит, как торможение. При этом противоракету пилотируют, вводя ее в полость конуса ударной волны 2. Траектория полета противоракеты на этом этапе имеет вид дуги «б». В момент пересечения противоракетой конуса 2 в точке «в», координаты противоракеты, непрерывно измеряемые по запаздыванию сигналов радиомаяков 7, являются одновременно координатами одной из точек поверхности фронта ударной волны 2. Если на борту противоракеты имеются два пространственно разнесенных датчика 4 и 5 фронта ударной волны (см. фиг. 2), то по разности времени появления в этих датчиках сигналов и по известному вектору скорости движения противоракеты можно определить угол «а» ориентации фронта ударной волны (см. фиг. 3). При нулевом значении угла «а» сигналы в датчиках будут одновременные. Знак расхождения их по времени отображает знак угла поперечного наклона фронта ударной волны относительно противоракеты и земли. Маневрированием противоракеты по курсу удерживают угол «а» около нулевого значения. При этом траектория «г» противоракеты будет совершать малые колебания относительно искривленной образующей конуса ударной волны (конуса Маха). Это избавит от перехода в винтовую линию, огибающую ось конуса, и обеспечит приведение траектории противоракеты к вершине О/ конуса, где расположена цель 1 (см. фиг. 3).
Аналогичные малые колебания противоракета совершает в вертикальной плоскости (см. фиг. 1). Задачей вертикальных колебаний является отслеживание поверхности фронта ударной волны, в то время, как задачей описанных выше малых колебаний в горизонтальной плоскости является пилотирование вдоль криволинейной образующей конуса. Аналогией является движение автомобиля по поверхности земли. При этом, направляющими, отслеживающими поверхность земли, служат колеса. Отслеживание образующей конуса является аналогом работы рулевого управления, обеспечивающего качение автомобиля по дну желобообразного, сужающегося по ходу движения, оврага.
Приведенная аналогия позволят понять распределение функций трех подсистем управления автопилота противоракеты: по крену, по тангажу и по курсу, обеспечивающих приведение противоракеты к цели с точностью, достаточной для прямого столкновения. При этом на заключительном этапе наведения, обеспечивающем точность до получения прямого столкновения, радиолокатор не требуется.
Чтобы оценить возможные параметры процесса наведения по расстояниям и требуемым перегрузкам противоракеты подсчитаем время и путь ускорения противоракеты до скорости 5 километров в секунду, что является пределом для возможных гиперзвуковых целей в атмосфере.
Принимая ускорение постянным и равном 100 м/сек2 (10 G), получим время ускорения 5000/100=50 секунд.
При этом путь ускорения составит 100* 502 /2=125000 м, т.е. 125 километров, что приемлемо для перехвата целей на подступах к важным объектам инфраструктуры государства, размещаемым обычно не на самой границе.
За это время цель, которая, в отличие от противоракеты, движется с постоянной скоростью, пройдет вдвое большее расстояние, т.е. 250 километров. Однако добавочные 125 километров входят в дальность действия радиолокатора 6 и могут простираться на чужую территорию.
Предлагаемый способ наведения особенно необходим для перехвата гиперзвукоых крылатых ракет, а также планирующих боевых блоков, точная радиолокация которых требует создания обширной разнесенной по территории наземной инфраструктуры, например в виде многопозиционной системы радиолокации. Или же потребует установки мощной боевой части, компенсирующей большой промах, обусловленный погрешностями однопозиционной радиолокации на больших дальностях. Оптические методы локации ограничены облачностью.
Таким образом, предлагаемый способ наведения противоракет на сверхзвуковые цели не имеет ограничений поточности и дальности радиолокации, а также по метеоусловиям и может быть реализован с применением имеющихся однопозиционных радиолокаторов и наземных радиомаяков позиционирования, входящих в состав системы ПВО.
Изобретение касается систем ПВО и может быть применено для наведения противоракет на сверхзвуковые маневрирующие цели, включая гиперзвуковые. Наведение противоракеты производится путем регистрации момента пересечения создаваемого целью фронта ударной волны с помощью установленных на борту противоракеты датчиков. При этом противоракету, вводят полостью в конуса Маха, ускоряют ее до скорости, превышающей скорость цели, а затем пилотируют в направлении вершины конуса Маха, где располагается цель, отслеживая поверхность фронта ударной волны и используя ее в качестве навигационной направляющей. Достигается повышение точности наведения до прямого столкновения с целью, без необходимости применения точной радио или оптической локации и мощной боевой части, а также обеспечивается возможность применения малоразмерных противоракет, позволяющих (в отличие от крупнотоннажных противоракет) получить требуемые для перехвата высокоскоростных и высокоманевренных целей перегрузки. 3 ил.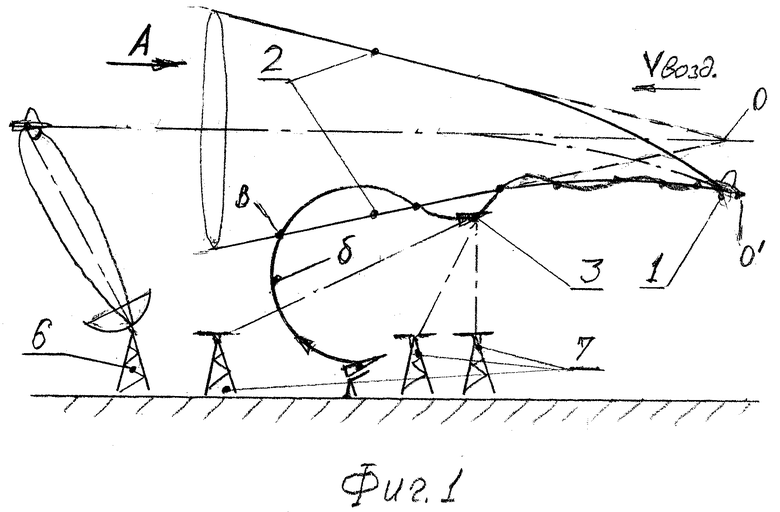
Способ наведения противоракеты на сверхзвуковую цель, осуществляемый путем определения положения цели по сигналам установленного на борту противоракеты датчика ударной волны, создаваемой сверхзвуковой целью в процессе движения в атмосфере, отличающийся тем, что противоракету пилотируют, вводя ее в полость конуса фронта ударной волны, разгоняют до воздушной скорости, превышающей воздушную скорость цели, и далее пилотируют противоракету, отслеживая положение ее относительно поверхности фронта ударной волны путем периодического пересечения фронта по колебательной траектории, стабилизируя при этом угол крена противоракеты относительно земли, причем амплитуду отклонения противоракеты относительно фронта ударной волны при этом плавно уменьшают, а угол отклонения фронта относительно застабилизированного относительно земли угла крена противоракеты поддерживают в окрестности нулевого значения путем маневрирования противоракеты по курсу.
| Способ поражения сверхзвуковой воздушной цели зенитным снарядом с неконтактным датчиком цели | 2019 |
|
RU2722909C1 |
| Способ поражения гиперзвуковых летательных аппаратов | 2019 |
|
RU2718183C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ И СКОРОСТИ ОБЪЕКТА | 2009 |
|
RU2416103C2 |
| БОРТОВАЯ СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СТРЕЛКОВ | 2010 |
|
RU2512128C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРЕДСКАЗАНИЯ ОПТИМАЛЬНЫХ РЕШЕНИЙ АТАКИ И ОБОРОНЫ В СЦЕНАРИИ ВОЕННОГО КОНФЛИКТА | 2018 |
|
RU2726394C1 |
| СПОСОБ ФОРМИРОВАНИЯ УПРАВЛЕНИЯ РАКЕТ ПРИ НАВЕДЕНИИ НА ГРУППУ МАНЕВРИРУЮЩИХ ЦЕЛЕЙ | 2010 |
|
RU2464520C2 |

