Изобретение относится к области воздушно-космической обороны и может быть применено для создания системы перехвата баллистических ракет, боеголовок и космических боевых летательных аппаратов.
Трудность решения проблемы точного наведения противоракеты на высоколетящие и высокоскоростные цели обусловлена высокими требованиями к точности определения текущих координат цели, что осложняется большой дальностью до наземной инфраструктуры, малым располагаемым временем на перехват цели, а также возможной многоэлементностью цели, возможной маневренностью ее, а также возможной массированностью ракетно-ядерного удара.
В известных способах наведения для упрощения противоракеты используют систему дистанционного командного наведения по радиоканалу с измерением текущих координат цели и противоракеты радиолокатором, располагаемым на земле или на борту вспомогательного летательного аппарата, который может быть приближен к месту перехвата цели, что повышает точность наведения (см. например: АРАНОВИЧ В.П., МИХАЙЛИН Д.А. «Управление и наведение самолетов и ракет», М. Изд. МАИ, 2013 г. Стр. 11 -13, рис. 1.5, 1.8).
Однако для перехвата баллистических ракет, боеголовок и космических целей базирование радиолокаторов на самолете мало что меняет по сравнению с наземным базированием, т.к. самолеты имеют скорость, ускорение и высоту полета, недостаточные, чтобы существенно приблизиться к месту возможного перехвата. Необходимо базировать радиолокатор на ракете.
Но, по экономическим соображениям, задача перехвата может быть решена только с применением малоразмерных, простых по конструкции и дешевых в массовом производстве ракет, обладающих достаточно высокой конечной скоростью и высотой полета и ускорением, доходящим до нескольких десятков G. Такую противоракету можно сделать при условии достаточного уменьшения массы и габаритов, а также упрощения конструкции головной ступени ракеты. Причем желательно предельно уменьшить или полностью устранить боевую часть, использовав прямое столкновение, т.к. боевая часть существенно влияет на массу конечной ступени и, следовательно, на стартовую массу и стоимость противоракеты.
Разместить на такой противоракете радиолокатор с узкой диаграммой направленности, требующей антенны размером в несколько раз превышающим длину волны, невозможно.
Целью изобретения является решение проблемы перехвата высотных и скоростных целей с применением малоразмерных противоракет.
Предлагается способ наведения противоракеты, состоящий в радиолокационном контроле текущего положения цели и противоракеты с помощью радиолокатора, установленного на вспомогательном летательном аппарате и передаче текущих координат цели и координат противоракеты на противоракету по радиоканалу. Цель изобретения достигается тем, что наведение производится с участием как минимум двух вспомогательных летательных аппаратов, в качестве которых используются малоразмерные ракеты, аналогичные по оснащению противоракете, которые вместе с противоракетой используются в качестве базы для активной многопозиционной радиолокационной системы (МПРЛС), а определение текущей ориентации противоракеты и вспомогательных ракет по углам курса, тангажа и крена производится путем обмена противоракеты и вспомогательных ракет радиосигналами с приемом радиосигналов на установленные на каждой из указанных ракет три антенны, чувствительные к трем разным компонентам вектора поляризации электрического поля радиосигнала, а также на три скрещенные антенны, чувствительные к трем разным компонентам магнитного поля. Этим обеспечивается возможность обойтись в МПРЛС без антенн с узкой диаграммой направленностью, а также избавляет от необходимости устанавливать на противоракете и на каждой из вспомогательных ракет гироскоп или его аналог, например оптический датчик угловой скорости (ДУС) с интегратором угловой скорости до углового перемещения. ДУС, а также гироскоп, являются обычно наиболее сложной и проблематичной по точности частью системы инерциальной навигации. (Несмотря на достигнутый в оптических ДУС малый дрейф начального состояния угловой скорости, проблему составляет точность интегрирования угловой скорости в угловое перемещение).
В предлагаемом способе для позиционирования ракеты по углам используется свойство электромагнитной волны сохранять поляризацию при распространении в атмосфере или в вакууме. Таким образом, угол ориентации вектора поляризации радиоволны передается в пространстве без изменения с одной ракеты на другую. При таком способе реализуется относительная угловая ориентация одной ракеты относительно двух других. Впрочем, магнитный компас тоже дает не абсолютную, а относительную ориентацию - ориентацию относительно земли. Но этого достаточно для навигации. При этом не определяется вращение всей системы вместе с землей. Однако, ввиду большого диаметра системы, угловое абсолютное вращение такой системы не может быть очень быстрым, что позволяет использовать образующуюся локальную вращающуюся систему, как и инерциальную без каких- либо проблем.
Обеспечиваемая участием в наведении двух вспомогательных летательных аппаратов возможность применения в качестве радиолокатора МПРЛС, обеспечивает также и возможность повышения точности определения координат по дальнометрическому методу. Такой метод радиолокации обеспечивает высокую точность определения всех трех координат цели без необходимости применения антенн с узкой диаграммой направленности. Это могут быть антенны в виде трех скрещенных рамок или диполей, обеспечивающие прием трех компонент вектора поляризации электрической и магнитной составляющих принимаемого электромагнитного поля.
Высокая точность определения координат в МПРЛС доказывается практикой использования спутниковой глобальной системы позиционирования.
Однако если цель состоит из множества расположенных на небольшом взаимном расстоянии элементов, то, при использовании ненаправленных антенн, в антенну попадают одновременно сигналы от всех элементов цели, а также от противоракеты и от вспомогательных ракет. И при этом возникает проблема так называемого межпозиционного отождествления сигналов, т.к. невозможно сразу определить - какой сигнал к кому элементу цели относится. В предлагаемом способе наведения для однозначного межпозиционного отождествления применяется третья вспомогательная ракета. При этом, отбор тех сочетаний принимаемых импульсов, которые относятся к одному элементу многоэлементной цели, производится на основе того факта, что вычисляемые координаты цели не должны зависеть от конфигурации расположения элементов радиолокационной базы МПРЛС. То есть, используются только те сочетания данных радиолокационной дальнометрии, которые остаются неизменными при изменении конфигурации радиолокационной базы, т.е. путем замены данных, полученных с одного из двух вспомогательных летательных аппаратов, на данные с третьего вспомогательного летательного аппарата. При этом признаком отбора неправильных сочетаний данных является скачкообразное изменение вычисляемых координат, соответствующее скачкообразному изменению конфигурации радиолокационной базы.
Поскольку вектор поляризации радиоволны в зоне расположения антенн может отличаться от поляризации на удалении от ракеты из-за влияния электропроводящих и намагничивающихся деталей ракеты, то в частном варианте предлагаемого способа, вектор поляризации, получаемый с указанных трех антенн корректируют с использованием заранее измеренной функции искажений поляризации электромагнитной волны, снятой экспериментально для всех ориентаций вектора поляризации. Это делается на стадии изготовления противоракеты и вспомогательных ракет с помощью стенда, на котором головную ступень ракеты вращают по всем трем углам относительно волны удаленного передатчика. Полученная функция зависимости внешнего вектора поляризации от внутреннего вектора поляризации заносится в бортовое запоминающее устройство (ЗУ) каждой ракеты и используется для коррекции ошибки (ее можно назвать инструментальной ошибкой приемника поляризации).
Изобретение поясняется нижеследующим описанием примеров выполнения и шестью фигурами.
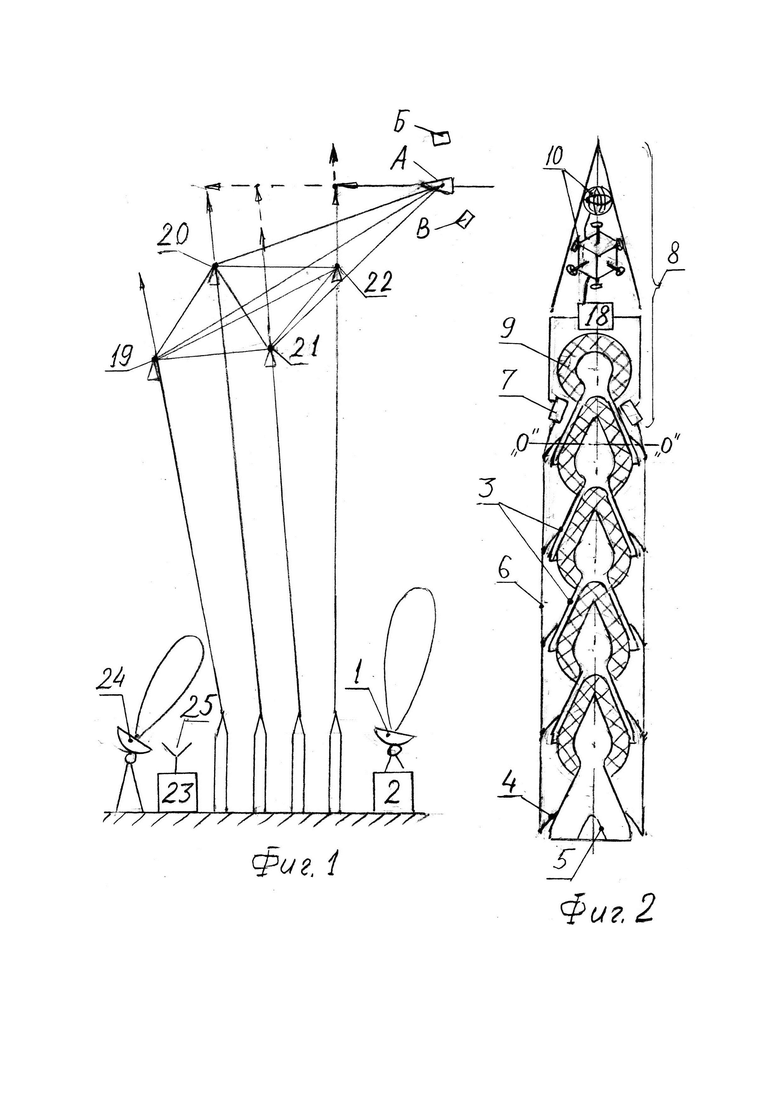
На фиг. 1 изображена схема процесса наведения на один из элементов многоэлементной цели в варианте с тремя вспомогательными ракетами и одной противоракетой.
На фиг. 2 изображена схема унифицированной малоразмерной твердотопливной многоступенчатой ракеты, которая может использоваться, как противоракета и как вспомогательная ракета.
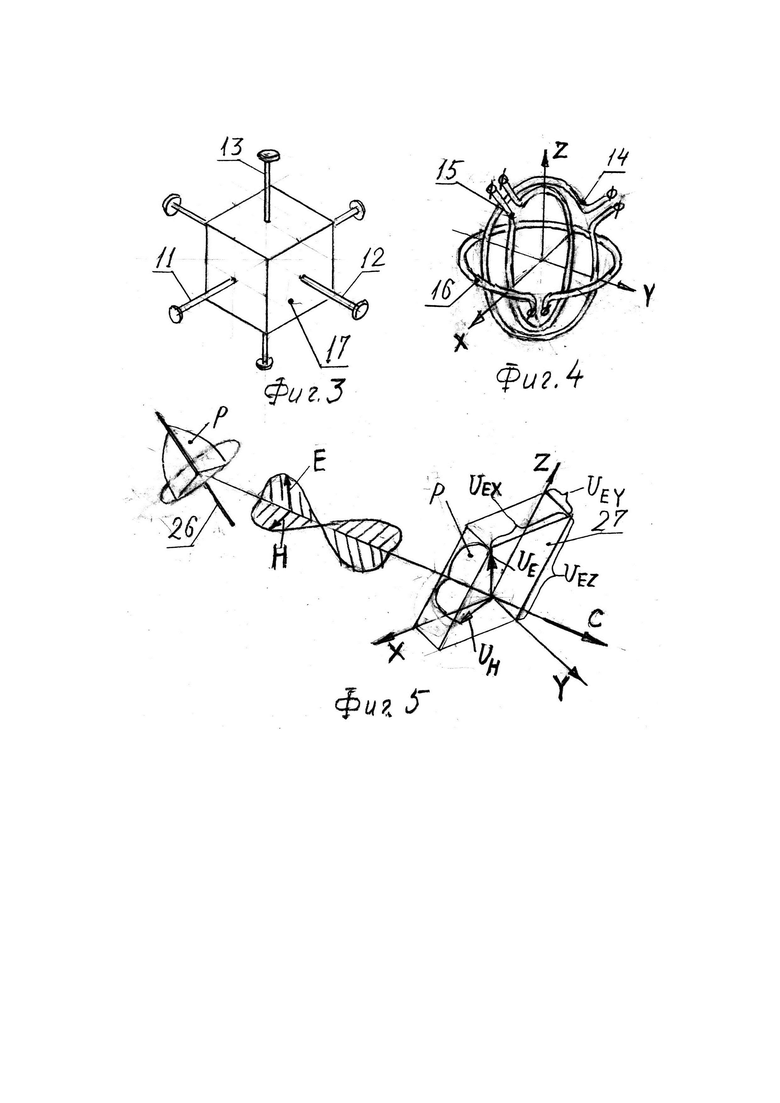
На фиг. 3 изображен вариант ботовой векторной антенны в виде трех полуволновых скрещенных диполей, используемой для получения сигнала об ориентации вектора электрической составляющей радиоволны.
На фиг. 4 изображен рамочный вариант векторной антенны, предназначенной для измерения ориентации вектора магнитной составляющей радиоволны.
На фиг. 5 поясняется способ позиционирования ракеты по углам ориентации с использованием вектора поляризации радиоволны, а именно - показано, как по полученным в бортовой системе координат XYZ трем компонентам вектора поляризации радиоволны получить направление на источник радиоволны, т.е. получить пеленг, позволяющий использовать источник радиоволны в качестве радиомаяка для углового позиционирования ракеты относительно другой ракеты.
Для упрощения понимания предлагаемого способа наведения возьмем не самый сложный случай, когда перехват остальных, классифицированных как боеголовки, элементов многоэлементной цели будет производиться на боле позднем участке траектории и с применением другой группы ракет (проблема идентификации свойств элементов цели и отделения их от ложных целей в данной заявке не рассматривается).
Цель, состоящую, в частности из множества элементов А, Б, В, обнаруживают с помощью наземного радиолокатора 1, передающего предварительные текущие координаты и скорость движения цели на наземный командный пункт 2, на котором, с применением быстродействующих вычислительных средств, разрабатывается план перехвата тех ее элементов, которые идентифицированы, как несущие угрозу. В соответствии с этим планом подготавливают к старту нужное количество противоракет и вспомогательных ракет, для каждой из которых программируется профиль тяги и время старта.
В качестве противоракет и вспомогательных ракет может быть использована универсальная малоразмерная твердотопливная многоступенчатая ракета, схема которой изображена на фиг. 2. Она состоит из множества (пять и более) твердотопливных разгонных ступеней 3, камера сгорания каждой из которых вложена в раструб закритической части сопла двигателя следующей ступени без какого-либо дополнительного скрепления. Такое устройство позволяет оперативно набирать нужное число ступеней из «магазина» и формировать профиль тяги под каждое конкретное полетное задание, учитывая дальность до цели, ее координаты, скорость, маневренность и т.д. При полном выгорании топлива одной ступени горение, без существенного провала тяги, по непрерывной огневой цепочке передается в следующую ступень. При этом за счет возникшего перепада давлений, отработавшая ступень выталкивается из сопла следующей ступени. Таким образом, осуществляется достаточно частое отбрасывание отработавшей массы конструкции, что позволяет приблизить эффективную скорость истечения газов, используемую в расчете параметров полета по формуле Циолковского, к достигнутой скорости истечения современных смесевых топлив (около 3 км/сек). Управление ракетой по курсу, тангажу и крену производится с помощью рулевых заслонок 4, прикрывающих вырезы 5, имеющиеся на краю среза сопла. Управление заслонками передается по цепочке механических связей 6, не препятствующих свободному разделению ступеней и идущих к рулевым машинам 7, установленным на головной ступени 8. В головной ступени 8 имеется, кроме двигателя 9 последней ступени, имеются антенны 10, выполненные например в виде трех взаимно ортогональных диполей 11, 12, 13 (м. фиг. 3), также в виде трех скрещенных рамок 14, 15, 16 (см. фиг. 4). Сигналы с этих антенн поступают на вход многоканального приемника 17. Этот приемник используется для приема сигналов от всех ракет группы. Кроме многоканального приемника на борту ракеты имеется исполнительный блок управления 18, реализующий контур автоматического управления рулевыми машинами 7 и исполняющий команды по управлению процессом наведения, поступающие с локального командного пункта, который может быть сосредоточен на одной из ракет группы, или распределен по отдельных ракетам с установлением приоритетов и полномочий.
Оперативное согласование скоростей движения ракет на пути подлета к зоне наведения, в виду невозможности управления тягой твердотопливных двигателей, может производиться путем кратковременного перевода остаточных ступеней ракеты в полет с вращением вокруг поперечной оси «О» ракеты (полет с кувырканием). Это эквивалентно кратковременному выключению тяги двигателя. Это бывает необходимо для компенсации случайных отклонений от заданного перед стартом расчетного профиля тяг. На выполнение этого маневра предусматривается запас топлива, обеспечивающий гарантированный остаток его на момент перехвата.
Предлагаемый способ наведения состоит в следующем. Получив разработанный в командном пункте 2 план перехвата, группа ракет 19, 20, 21, 22 стартует с земли и выводится в район предполагаемой встречи с целью под управлением наземного пункта 23, оснащенного радиолокатором 24 и передатчиком 25 команд управления ракетами на этапе подлета к месту перехвата. При этом с самого момента старта ракет включается образованная указанной группой ракет многопозиционная система радиолокации (МПРЛС), обеспечивающая реализацию запланированного графика изменения относительного взаиморасположения ракет в процессе полета. Кроме того, передатчики и приемники, имеющиеся на каждой из ракет группы, независимо от выполняемой ракетами функции, осуществляют постоянный обмен радиосигналами, осуществляющими контроль углового положения каждой ракет относительно других ракет группы, выполняя при этом функции отсутствующих бортовых гироскопов. Для углового позиционирования ракеты могут использоваться любые радиосигналы, в частности, и сигналы команд управления ракетам, которые передаются и принимаются теми же векторными антеннами 10.
Однако, при таком способе навигации группы ракет, вся группа ракет в целом может неконтролируемым образом вращаться. Впрочем, на участке траектории подлета, это вращение может быть замечено и устранено командами управления с пункта управления 23. При этом одна из ракет группы, например ракета 22, наделяется функцией противоракеты, оставляя остальным ракетам функцию вспомогательных ракет, на которых базируются элементы МПРЛС.
Командный пункт 23 выводит группу ракет в зону предполагаемого перехвата, где должен произойти захват многоэлементной цели А, Б, В указанной МПРЛС. На этом участие наземного командного пункта 23 в процессе наведения прекращается. При этом группа ракет полностью контролирует пространственную конфигурацию группы и относительные угловые положения всех ракет. Однако остается некоторое неконтролируемое вращение всей группы как целого. При этом группа в целом представляет собой неконтролируемо вращающуюся и движущуюся с большим ускорением, т.е. неинерциальную, систему, используемую для относительного позиционирования и полной относительной навигации всех ракет группы. Такая ситуация аналогична использованию земли в качестве неинерциальной (вращающейся) базы для навигации автомобилей, самолетов и судов. И неинерциальность такой системы не является препятствием для успешности выполнения навигации всех транспортных средств. При чем, процесс наведения кратковременный. Поэтому даже более существенная неинерциальность системы, образованной группой ракет, обусловленная большим ускорением всей группы, как целого, вполне допустима.
После захвата многоэлементной цели А, Б, В, МПРЛС осуществляет ее сопровождение. Ракета 22, которая с самого старта назначена противоракетой, согласно плану перехвата, выводится на соответствующую, выгодную для перехвата, траекторию и в соответствующее текущее положение относительно цели. Наведение производится управлением углами курса и тангажа противоракеты с получением соответствующих радиусов кривизны траектории противоракеты, при которых ее пространственно временной график движения пересечется с пространственно временным графиком выбранного элемента цели. Единственная проблема здесь - возможный не предсказуемый маневр цели. Однако ускорение цели, несущей обычно массивный боевой заряд, всегда будет малой по сравнению с ускорением противоракеты, несущей малый боезаряд или вообще не имеющей его. Поэтому смещение предполагаемой точки встречи с целью, возникающее из за маневрирования цели, всегда сможет парироваться дополнительным изменением кривизны траектории противоракеты. При этом, величина промаха будет определяться главным образом точностью измерения координат с помощью МПРЛС. Нет проблем доведения погрешности локации с помощью МПРЛС до долей метра, что обеспечивает возможность получения прямого столкновения с целью. При имеющихся космических скоростях столкновения противоракеты с целью любая масса головной части противоракеты приведет к быстрому полному уничтожению боеголовки, так что не успеет сработать никакой взрыватель. Ядерный заряд будет деформирован и не сработает. Но даже и осколки осколочно-фугасной боевой части на космической скорости встречи с целью способны пробить цель насквозь. Применение осколочно-фугасного боезаряда массой 3-5 килограмм позволит увеличить допустимую величину промаха, до нескольких метров. Однако здесь потребуется с высокой точностью определить момент подрыва боевой части противоракеты, что осуществляется также с помощью МПРЛС.
Если произошел промах, то противоракета останется целой и может продолжить работу в качестве одной из позиций МПРЛС. При этом перехват цели может быть повторен путем наведения другой из ракет группы, например ракеты 21, которую для этого в процессе наведения противоракеты следует также пилотировать по графику, соответствующему процессу наведения на цель на более позднем участке. Этому способствует имеющийся избыток числа ракет в группе по сравнению с минимально необходимым числом три, а также возможность в широких пределах изменять геометрическую конфигурации взаимного расположения вспомогательных ракет. Процедура межпозиционного отождествления, на позднем этапе наведения может не понадобиться, в виду относительной удаленности остальных элементов цели по сравнению с выбранным для перехвата элементом. Таким образом, наличие избыточного числа ракет позволяет увеличивать число попыток наведения, до тех пор, пока в группе не останется всего три ракеты.
Поясним процесс межпозиционного отождествления, осуществляемого при вычислении координат элементов цели. Каждый из элементов А, Б, В цели дает в приемнике свой импульс приема сигнала передатчика с индивидуальным временем задержки, относительно времени излучения его передатчиком. Кроме того, импульсы приема дает также рассеяние сигнала передатчика каждой ракетой группы, а также и прямой, нерассеянный, сигнал каждого передатчика. Таким образом, в рассматриваемом примере в каждом приемнике, в случае отсутствия случайных слияний импульсов, мы получим по 6 импульсов от рассеяния, плюс 3 прямых импульса. Прямые импульсы можно отличить по их интенсивности или по известному времени их излучения. Однако сразу невозможно отличить к какому элементу цели относится тот или иной рассеянный импульс. Разобраться в этом помогает тот факт, что вычисляемые с использованием времен задержки координаты цели не должны зависеть от конфигурации используемой в МПРЛС базы (т.е. от используемого треугольника расположения позиций приема и передачи). Например, используя избыточное число приемников, можно в качестве базы взять треугольник, образуемый позициями 19, 20, 22. А можно вычислить координаты, используя данные, полученные с позиций 19, 21, 22. Если вычисленные по этим данным координаты цели будут резко отличаться, то выбранное для расчета координат сочетание времен задержек не соответствует реальному элементу цели. Для межпозиционного отождествления придется перебрать все сочетания принятых рассеянных импульсов, взятых по одному с каждой из двух приемных позиций. Они образуют (6 в квадрате) 36 сочетаний, которые следует перебрать в каждом цикле радиолокации. Соответствующий микроэлектронный процессор легко может быть размещен на борту малоразмерной ракеты.
При этом следует учитывать возможность излучения элементами цели сигналов радиопротиводействия. От них можно отстроиться применением для радиолокации широкополосных шумоподобных сигналов с модуляций по определенному, закону, и с детектированием рассеянных сигналов путем получения интегральной свертки с сигналом детектора, промодулированному по закону, когерентному закону модуляции «своих» передатчиков.
Если ставится задача перехватить множество элементов цели за один раз, то к месту перехвата высылается более многочисленная группа ракет. При этом возникает проблема распределения нескольких противоракет по элементам цели. Кроме того, при этом увеличивается число импульсов, принимаемых ненаправленными антеннами локальной МПРЛС. Это квадратично увеличивает число сочетаний, которые придется анализировать при межпозиционном отождествлении сигналов. В остальном процесс наведения производится аналогично вышеописанному.
Требует пояснения также процесс углового позиционирования ракет, осуществляемого путем измерения ориентации вектора поляризации радиосигналов с других ракет группы. Для определения трех углов ориентации ракеты, т.е. углов курса, тангажа и крена достаточно определить ориентацию векторов поляризации плоскополяризованной волны электромагнитной в зоне приема как минимум от двух передающих станций из четырех имеющихся, векторы поляризации которых должны быть не параллельны. В данном случае используется плоская поляризация. Ориентация вектора поляризации задается антенной передатчика, и она своя для каждого направления распространения волны. Однако передаются она в пространстве, сохраняя свою ориентацию. Например передающий диполь 26 (см. фиг 5) задает в направлении приемника 27 направление напряженности Е электрического поля и перпендикулярного ему вектора Н магнитного поля, которые, вместе с направлением луча С на позицию приемника 27, образуют ортогональную систему. При этом вектор Е располагается в плоскости Р, которая образуется линией направления диполя 26 передатчика и направлением излучения С. Получив вектор Е, антенна приемника, в виде трех скрещенных диполей (по фиг. 4), раскладывает его на три компоненты UEX, UEY, UEZ в бортовой системе координат X, Y, Z ракеты. Если затем, аналогичным образом разложить вектор напряженности магнитного поля Н (с помощью антенны, состоящей из трех скрещенных рамочных антенн, изображенных на фиг. 4, которая, в отличие от дипольной антенны, чувствительна к магнитному полю, то можно построить ортогональный к ним луч направления С на передающую антенну 26. Таким образом мы получим пеленг на источник излучения, который можно использовать для углового позиционирования, как маяк. Определив аналогичным образом пеленг на любой второй источник излучения, мы получим полную информацию, необходимую для углового позиционирования относительно группы ракет. Для этого следует (расчетным путем) совместить одно из полученных направлений пеленга с координатами соответствующих передатчика и приемника, которые постоянно отлеживаются МПРЛС, а затем, вращая второй пеленг относительно первого, совместить оба пеленга с конфигурацией группы ракет. Тогда полученные углы расположения бортовой системы координат Х,Y,Z относительно совмещенной с пеленгами группы ракет могут рассматриваться, как углы, определяющие все три угла поворота ракеты, как твердого тела относительно всей системы (группы) ракет.
Таким образом, предлагаемый способ позволяет применить для перехвата высотных и скоростных целей малоразмерные ракеты описанной выше универсальной пакетной конструктивной схемы. Стартовая масса каждой ракеты может составлять от нескольких десятков до двух сотен килограмм при достаточно простой конструкции ступеней и системы навигации и наведения. Это позволит, при массовом производстве указанных малоразмерных ракет, реализовать превосходство численности противоракет над численностью стратегических боеголовок противника, необходимое для получения вероятности перехвата, приближающейся к единице.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ ПРОТИВОРАКЕТЫ НА СВЕРХЗВУКОВУЮ ЦЕЛЬ | 2022 |
|
RU2825905C2 |
| СПОСОБ АКТИВНОЙ МНОГОПОЗИЦИОННОЙ РАДИОЛОКАЦИИ МНОГОЭЛЕМЕНТНОЙ ЦЕЛИ | 2021 |
|
RU2816506C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2021 |
|
RU2839246C2 |
| КИНЕТИЧЕСКАЯ БОЕГОЛОВКА С АЭРОДИНАМИЧЕСКИМ НАВЕДЕНИЕМ | 2022 |
|
RU2825027C2 |
| СИСТЕМА УПРАВЛЕНИЯ РАКЕТЫ С МНОГОСТУПЕНЧАТЫМ ТВЁРДОТОПЛИВНЫМ ДВИГАТЕЛЕМ | 2021 |
|
RU2804562C2 |
| Способ межпозиционного отождествления результатов измерений и определения координат воздушных целей в многопозиционной радиолокационной системе | 2019 |
|
RU2713193C1 |
| РЕАКТИВНЫЙ СНАРЯД-ПЕРЕХВАТЧИК | 2021 |
|
RU2814225C2 |
| СПОСОБ СКРЫТНОГО САМОНАВЕДЕНИЯ САМОЛЕТОВ НА ВОЗДУШНЫЕ ОБЪЕКТЫ | 2009 |
|
RU2408845C1 |
| Способ радиолокации целей | 2023 |
|
RU2808952C1 |
| СИСТЕМА НАВЕДЕНИЯ | 2001 |
|
RU2215972C2 |
Изобретение относится к области воздушно-космической обороны и может быть применено в системах перехвата баллистических ракет, боеголовок, космических боевых летательных аппаратов (ЛА). Предложен способ наведения противоракеты системы малоразмерных ракет. Для наведения используются два и более вспомогательных ЛА, образующих активную многопозиционную радиолокационную систему (МПРЛС). Определение текущей ориентации каждого вспомогательного ЛА и противоракеты по углам курса, тангажа и крена производится путем обмена элементов радиосигналами с приемом радиосигналов на три скрещенные антенны, чувствительные к электрической компоненте излучения, вспомогательных ЛА и на три скрещенные антенны, чувствительные к магнитной компоненте излучения. Путем совмещения полученных пеленгов на два источника излучения, совмещая их с определяемой системой МПРЛС текущей конфигурацией системы, определяют углы ориентации приемников относительно системы малоразмерных ракет. Достигается возможность перехвата высотных и скоростных целей с применением малоразмерных ракет. 2 з.п. ф-лы, 5 ил.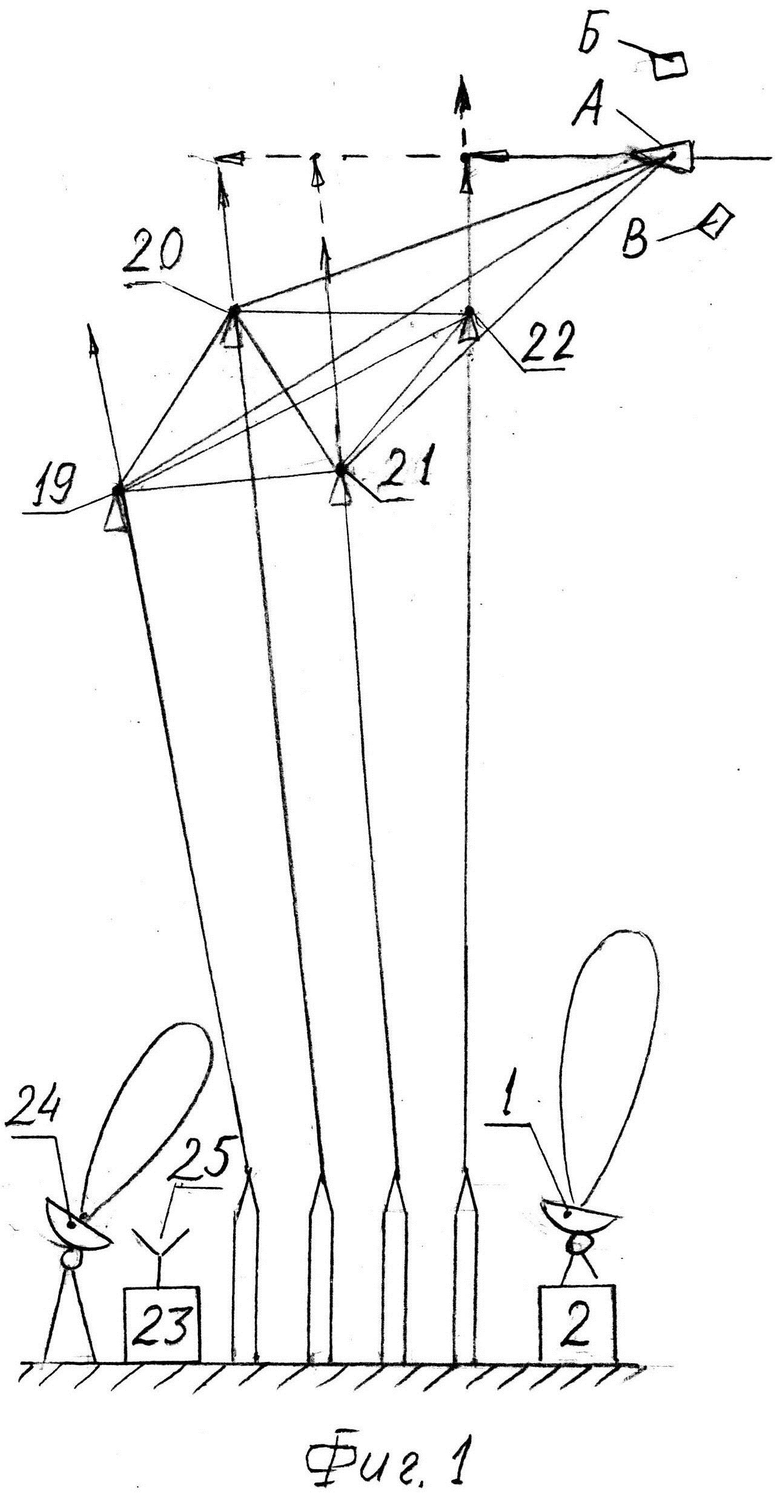
1. Способ наведения противоракеты системы малоразмерных ракет, состоящий в радиолокационном контроле текущего положения цели и противоракеты с помощью радиолокатора, установленного на вспомогательном летательном аппарате и передаче текущих координат цели и противоракеты на противоракету по радиоканалу,
отличающийся тем, что для наведения используются как минимум два вспомогательных летательных аппарата, образующих активную многопозиционную радиолокационную систему (МПРЛС), а определение текущей ориентации каждого вспомогательного летательного аппарата и противоракеты по углам курса, тангажа и крена производится путем обмена всех перечисленных элементов радиосигналами с приемом радиосигналов на три скрещенные антенны, чувствительные к электрической компоненте излучения, вспомогательных летательных аппаратов - малоразмерных ракет и на три скрещенные антенны, чувствительные к магнитной компоненте излучения, вспомогательных летательных аппаратов - малоразмерных ракет, а затем, путем совмещения полученных таким образом пеленгов на два источника излучения, совмещая их с определяемой указанной системой МПРЛС текущей конфигурацией системы, определяют углы ориентации указанных приемников относительно системы малоразмерных ракет.
2. Способ по п. 1, отличающийся тем, что в наведении участвуют три вспомогательных летательных аппарата, а межпозиционное отождествление сигналов от элементов цели и от всех летательных аппаратов, попадающих одновременно в диаграммы направленности антенн, производится путем использования только тех сочетаний данных радиолокационной дальнометрии, которые остаются неизменными при изменении конфигурации радиолокационной базы путем замены данных, полученных с двух вспомогательных летательных аппаратов, на данные с использованием третьего вспомогательного летательного аппарата.
3. Способ по п. 1, отличающийся тем, что направление вектора поляризации, получаемого с использованием сигналов с трех указанных антенн, корректируется с использованием заранее измеренной и находящейся в запоминающем устройстве каждого вспомогательного летательного аппарата и противоракеты, функции, корректирующей ошибку, вызванную искажением поля от элементов конструкции летательного аппарата.
| Митрофанов А | |||
| Авиационные противоракеты воздух-воздух | |||
| Военное обозрение, 31.05.2021 | |||
| СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ТЕМПЕРАТУРЫ И СОДЕРЖАНИЯ УГЛЕРОДА В РАСПЛАВЛЕННОМ ЧУГУНЕ | 0 |
|
SU183434A1 |
| Системы противоракетной обороны в мире | |||
| РИА Новости, 11.10.2016 | |||
| https://ria.ru/20161011/1478968477.html | |||
| КОМПЛЕКС ПРОТИВОВОЗДУШНОЙ РАКЕТНО-КОСМИЧЕСКОЙ ОБОРОНЫ | 2002 |
|
RU2227892C1 |
| US 20200318967 A1, 08.10.2020. | |||
