Заявляемое изобретение относится к двигателям с внешним подводом теплоты роторного типа и предназначено для использования в качестве главных и вспомогательных (стационарных и передвижных) силовых установок, в том числе и для транспортных средств. Наиболее близким к данному изобретению является силовая установка с внешним подводом теплоты и ее роторная машина в качестве модуля по патенту РФ №2731466 от 2019-05-15. Силовая установка (двигатель), составленная из одного, или как комбинация нескольких модулей (секций), посаженных на один вал, с подобранными параметрами для каждого, на базе роторной машины с выдвигающимися лопатками, или роторной машины Ванкеля. С определенными зонами нагрева и охлаждения для определенных модулей, и каждый из них реализует определенный такт заданного замкнутого или открытого термодинамического цикла работы силовой установки. Модули соединены, соответственно, элементами впускного-выпускного тракта, включающими трубопроводы и теплообменники, при последовательном непрерывно-равномерно-однонаправленном потоке рабочего тела (РТ) в установке. С возможным применением регенератора (рекуператора), вставленного в определенном месте тракта. Роторная машина, с выдвигающимися лопатками, содержит неподвижный корпус, с выполненными в нем канавками, жестко посаженный на вал ротор и выдвижное устройство. Канавки с ободом ротора образуют полости, которые имеют впускные и выпускные окна. Канавки в зоне впускного и выпускного окон расширены в сторону переходов. Ротор выполнен в виде колеса с ободом, имеющим кольцеобразный выступ прямоугольной или полусферической формы, соответствующей профилю канавок корпуса. В теле ротора, в изолированных от внутриободного пространства каналах-направляющих, расположены лопатки (прямые, изогнутые), с возможностью выхода только в функциональные полости. Лопатки имеют шарнирное соединение с элементами выдвижного устройства через штоки. Выдвижное устройство (ВУ) обеспечивает, согласованное с углом поворота ротора, выдвижение и задвигание лопаток, с возможностью, в пределах участка рабочей полости на противоположных его концах, одновременно находиться двум смежным лопаткам в определенный момент вращения ротора. Данные двигатели имеют ряд недостатков. Определенные модули выгодно выполнять на базе роторных машин другого типа, обеспечивающих более эффективную реализацию определенного такта. Расположение модулей на одном валу, в определенных случаях, не позволяет полно использовать объем и ограничивает место, выделенное для размещения силовой установки. Усложнен оптимальный подвод трубопроводов, соединяющих модули. Для модулей, имеющих две рабочие полости и более двух прямых лопаток, радиальное расположение каналов не позволяет добиться значительного (относительно) вылета лопаток со штоками, через шарнирное соединение с шатуном ВУ. А изогнутые лопатки имеют малый радиус и тоже относительно малый вылет, при этом выдвинутая лопатка имеет составляющую газовых сил, действующую в направлении выдвижения, что снижает механический КПД. Пересечение лопаток (в одном модуле) и подвод элементов ВУ не позволяет иметь нужную большую опорную часть (часть лопатки, при выдвижении, всегда остающейся в канале), при меньшем диаметре ротора. Что ведет к увеличению масса-габаритных (удельных) показателей двигателя в целом. Отсутствие возможности иметь разную скорость вращения роторов, что, в определенных тактах цикла, повышает эффективность рабочего процесса.
Заявляемый двигатель, как и известный, может быть составлен из одного, или как комбинация нескольких модулей, с подобранными параметрами для каждого, на базе роторной машины. С определенными зонами нагрева и охлаждения для определенных модулей, и каждый из них реализует определенный такт заданного замкнутого или открытого термодинамического цикла работы двигателя. Модули соответственно соединены элементами впускного-выпускного тракта, включающими трубопроводы и теплообменники, при последовательном непрерывно-равномерно-однонаправленном потоке рабочего тела в двигателе. С возможным применением регенератора (рекуператора), вставленного в определенном месте тракта. Роторная машина определенного модуля содержит неподвижный корпус, с выполненными в нем канавками, жестко посаженный на вал ротор и выдвижное устройство. Канавки с ободом ротора образуют полости, которые имеют впускные и выпускные окна. Канавки в зоне впускного и выпускного окон расширены в сторону переходов. Ротор выполнен в виде колеса с ободом, имеющим кольцеобразный выступ, соответствующий профилю канавок корпуса. В теле ротора, в изолированных от внутриободного пространства каналах-направляющих, расположены лопатки (прямые, изогнутые), с возможностью выхода только в функциональные полости. Лопатки имеют шарнирное соединение с элементами выдвижного устройства. Выдвижное устройство (ВУ), на базе зубчато-кривошипного механизма, обеспечивает, согласованное с углом поворота ротора, выдвижение и задвигание лопаток.
Заявляемые двигатели с внешним подводом теплоты замкнутого и свободного цикла могут быть реализованы в качестве паровой машины, как двигатели, использующие газообразное рабочее тело (на всех стадиях цикла), и как двигатели, использующие смешанное двухкомпонентное рабочее тело (одно из которых меняет свою агрегатное состояние в течение цикла).
Технической проблемой, решаемой данным изобретением, является: наличие однотипных модулей, не всегда эффективно реализующих определенный такт; размещение модулей ограничено, что не позволяет рационально использовать объем выделенный для СУ и упростить соединения элементов двигателя; равные обороты не позволяют эффективно реализовывать определенные такты и уменьшить габариты модулей; модули с выдвигающимися лопатками имеют малую опорную часть, что понижает их надежность.
Техническим результатом изобретения является повышение эффективности в использовании энергии газов и, соответственно, КПД, увеличение удельной мощности, и уменьшение габаритов двигателя, упрощении, повышении надежности, удобство (доступность) в обслуживании и ремонте.
Данный технический результат достигается тем, что двигатель может состоять из комбинации определенных модулей, содержащих различные типы роторных машин каждый. Модули могут быть расположены произвольно в пространстве, даже в разных плоскостях, и согласуются между собой посредством зубчатых колес и валов, цепной и ременной передачей. Модули могут иметь разную частоту вращения ротора. В каналах в теле ротора могут быть расположены изогнутые лопатки, с постоянным радиусом кривизны больше радиуса ротора. Головка шатуна ВУ имеет шарнирное соединение с цилиндрическим стержнем, расположенным на длинном изогнутом торце лопатки. Закрепленные на стержне планки прикрывают открытую для хода шарнира сторону канала. Модули могут иметь ротор, содержащий одну или две прямые лопатки, которые расположены в каналах, проходящих диаметрально через все тело ротора (сквозной проход), и имеющих выходы для лопаток с двух противоположных сторон ротора. Модуль может содержать выдвижное устройство, вал которого свободно закреплен в его (опора вала) корпусе и смещен в сторону наибольшего выдвижения лопатки, а зубчатое колесо вала входит в зацепление с зубчатым венцом на внутреннем ободе полого вала ротора. А рычаг кривошипа соединен, в соответствующем месте, с элементом шарнира на торце лопатки. Модули, имеющие одну рабочую полость с ротором, содержащего две, проходящих через все его тело, пересекающиеся лопатки, могут осуществлять два такта или удвоение рабочих тактов.
Выполнение определенных модулей на базе роторных машин другого типа (шестеренчатой (шестеренной), роторной-винтовой, турбо), включая и совместное применение модулей на базе роторных машин с выдвигающимися лопатками и машин Ванкеля, позволит определенные такты реализовать более эффективно, что повысит общий КПД двигателя. Также есть возможность уменьшить габариты двигателя.
Выполнение двигателя с произвольным размещением модулей позволяет более полно и рационально использовать объем, выделенный для размещения силовой установки, что повышает его компактность и улучшает доступность при ремонте и обслуживании. А также иметь наиболее выгодное соединение модулей связывающими трубопроводами, что уменьшает газодинамические потери.
Выполнение модулей, имеющих разную частоту вращения, позволяет более полно использовать энергию газовых сил (повышение КПД) и ведет к уменьшению массы и габаритов двигателя.
Выполнение каналов (в теле ротора) и изогнутых лопаток, с постоянным радиусом кривизны больше радиуса ротора, позволяет рационально использовать внутриободное пространство. Это увеличит длину канала и лопатки и, соответственно, опорную часть последней. Что позволит добиться относительно большего вылета лопатки при меньшем диаметре ротора. Это приводит к повышению удельной мощности, снижению массы и габаритов, увеличению ресурса и надежности двигателя.
Выполнение ВУ, у которого головка шатуна имеет шарнирное соединение с цилиндрическим стержнем на лопатке, позволяет связь ВУ с лопаткой сделать короче и надежней, что упрощает конструкцию и повышает ее надежность.
Выполнение планок, закрепленных на стержне, позволяет прикрыть открытую часть канала и разделить зоны применения сухой и жидкой смазки, что повышает надежность двигателя.
Выполнение ротора с радиальным расположением каналов, проходящих через все его тело, позволяет иметь лопатку с кратно большей опорной частью и, соответственно, большим относительным вылетом лопатки. Появляется возможность одновременного участие крайних, противоположных торцовых участков одной лопатки в рабочем процессе. Что приводит к повышению удельной мощности, снижению массы и габаритов и повышению ресурса и надежности двигателя.
Выполнение ВУ, вал которого свободно закреплен в теле модуля (опора вала ВУ) и смещен в сторону наибольшего выдвижения лопатки, а зубчатое колесо вала ВУ входит в зацепление с зубчатым венцом на внутреннем ободе полого вала ротора и имеющее диаметр и количеством зубьев вдвое меньше, чем зубчатый венец полого вала ротора. При этом рычаг кривошипа соединен в соответствующем месте с элементом шарнира на длинном торце лопатки. Это позволяет иметь компактный механизм выдвижения, исключить одно звено (шатун), упростить механизм и повысить его надежность.
Выполнение модуля, имеющего одну рабочую полость, с ротором содержащего две, проходящие через все его тело, пересекающиеся лопатки, позволяет осуществлять два такта в одном модуле или удвоение рабочих тактов на оборот, что ведет к увеличению удельной мощности. Также это позволяет уменьшить количество модулей (для заданного цикла), тем самым увеличить мех. КПД и увеличить реакцию системы при регулировании (за счет отсутствия переходных объемов-трубопроводов).
Таким образом, вышеперечисленная совокупность признаков изобретения, позволяет обеспечить новый технический результат - значительное повышение надежности, удельных характеристик и повышение эффективности использования энергии газов и, соответственно, КПД двигателя.
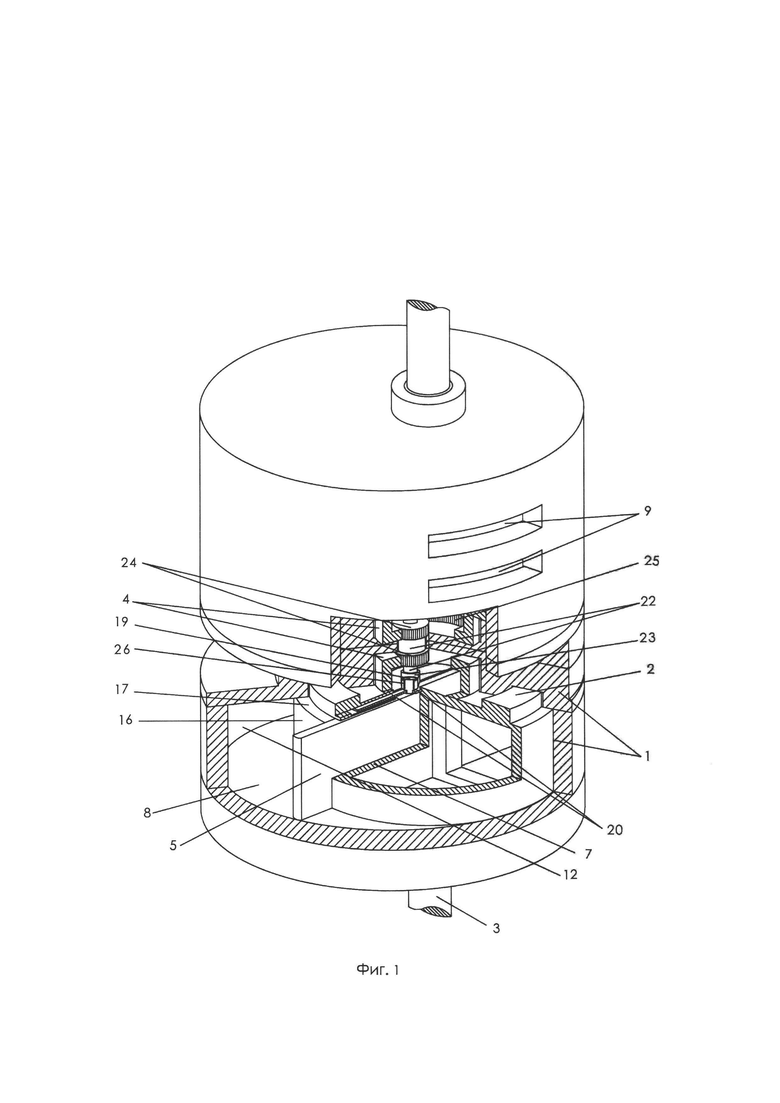
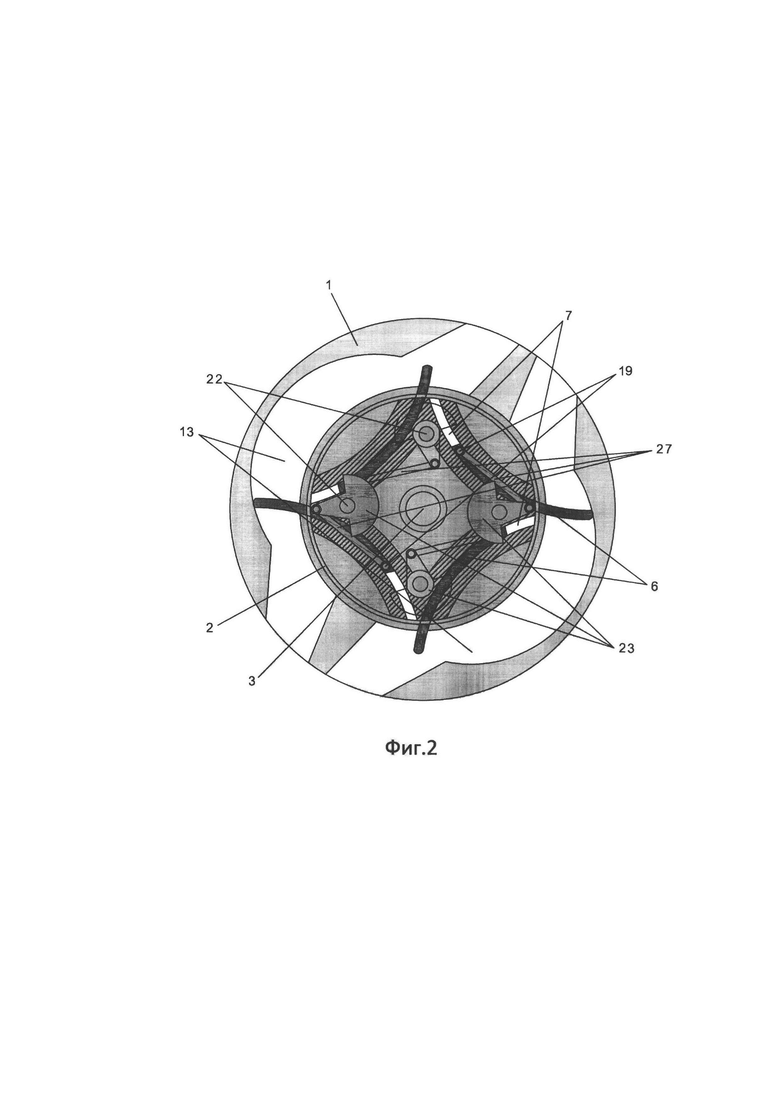
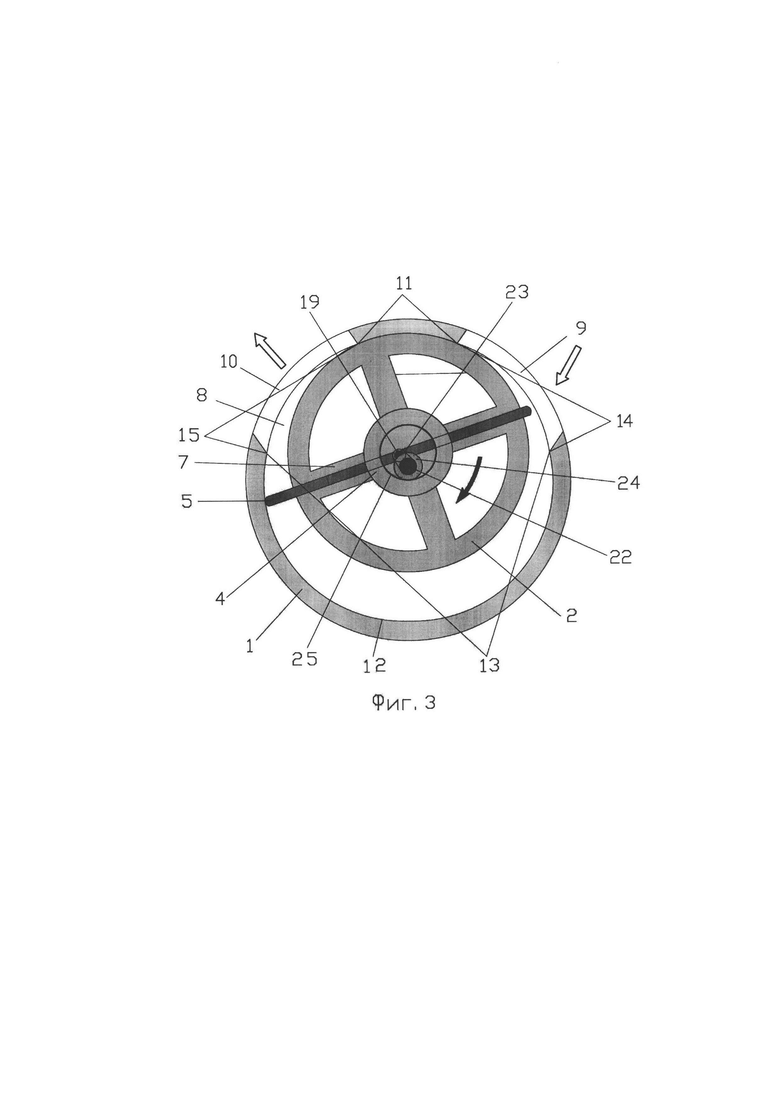
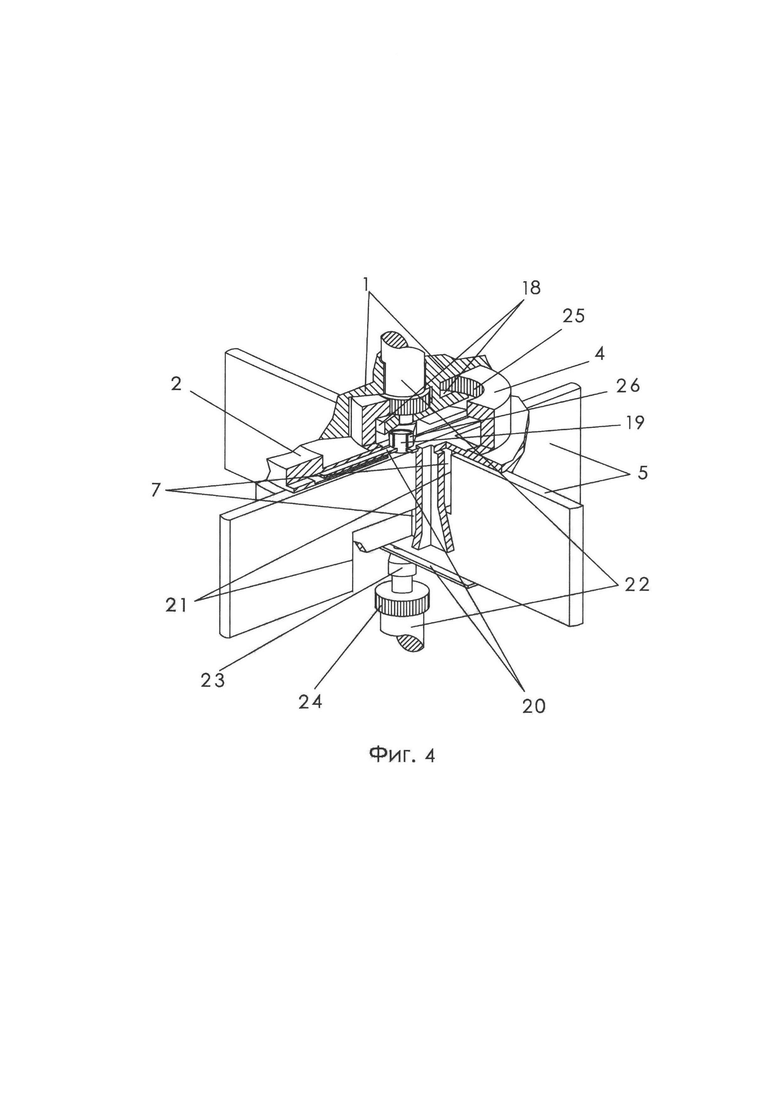
Изобретение поясняется с помощью чертежей, где на фиг. 1 представлен фрагмент общего вида двигателя в изометрии (составленного из двух роторных машин); на фиг. 2 - схема с 4-мя изогнутыми лопатками; на фиг. 3 - схема работы роторной машины с одной прямой лопаткой; на фиг. 4 - фрагмент роторной машины с ВУ для двух прямых лопаток; на фиг. 5 - схема работы роторной машины с двумя лопатками; на фиг. 6 - примерная схема построения двигателя.
Роторная машина, с выдвигающимися лопатками и равномерным вращением главного элемента, для двигателя с внешним подводом теплоты (фиг. 1, 2), содержит: неподвижный корпус 1, представляющий полый цилиндр, который с торцов прикрыт крышками; ротор 2 (главный элемент), в виде, посаженного на вал 3 и полый вал 4, колеса, в роторе 2 содержатся прямые лопатки 5 или изогнутые лопатки 6 в каналах-направляющих 7 (соответственно расположенных радиально или тангенциально в теле ротора); выдвижное устройство (ВУ).
Основная часть корпуса 1 (фиг. 1, 3) представляет собой полый, кольцеобразный цилиндр и на его внутренней поверхности выполнены канавки соответствующего профиля. Внутренняя ободная поверхность корпуса (канавки) и внешняя ободная поверхность ротора образуют функциональную полость 8, с впускным 9 и выпускным 10 окнами. В месте контакта ротора с корпусом имеется перегородка (зона перехода) 11. Верхняя и нижняя части корпуса 1 являются, соответственно, верхней и нижней опорой цапф вала ротора и прикрывают с торцов основную часть корпуса. Ширина канавок в функциональной полости соответствует ширине лопаток. На профильной стенке 12 основной части корпуса 1, в начале функциональной полости 8 (в соответствии с направлением вращения ротора), имеются впускное окно 9, а в конце - выпускное окно 10. Функциональная полость 8 (фиг. 3) состоит из рабочего участка (зоны) 13, где наибольшее воздействие рабочего тела на лопатку (рабочий ход), или воздействие лопатки на рабочее тело (сжатие, вытеснение), и зоны впускного 14 и выпускного 15 окон. Канавки в зонах впускного 14 и выпускного 15 окон расширены в сторону перехода 11.
Ротор 2 (фиг. 1, 2, 3, 4) представляет собой тело цилиндрической формы, в виде колеса с ободом 16, который имеет кольцеобразный выступ 17 прямоугольной или полусферической формы (в поперечном сечении ротора) и, соответствующей формы, канавки в корпусе 1. Ротор 2 содержит одну или две прямые лопатки 5, или несколько изогнутых лопаток 6 во внутренних каналах-направляющих 7, которые расположены в теле ротора (спицах) радиально или тангенциально, при этом форма профиля короткого торца лопатки соответствует форме профиля кольцеобразного выступа. В радиально расположенных спицах (для прямых лопаток) выполнены каналы-направляющие 7, проходящие через все тело ротора (сквозной проход) по его диаметральной линии и изолированы от внутриободного пространства (и друг от друга, с двумя пересекающими лопатками), за исключением центральной части, в пределах внутреннего обода полого вала 4 (на величину хода лопатки). Данное пространство может быть изолированно на определенном уровне полого вала 4 ВУ крышкой 18 корпуса, это позволяет дополнительно изолировать каналы от, подверженного жидкой смазке, околоосевого пространства (где расположены элементы ВУ). На внешней ободной поверхности ротора 2 имеются отверстия канала для выхода лопаток 5, 6 в функциональную полость 8. Канал 7, также имеет уплотнения с лопаткой, не позволяющее перетекание РТ вдоль него (не показано). Обод 16, сопряженный с задней (по ходу вращения) стенкой канала, несколько сглажен.
Лопатка (фиг. 1, 2) представляет собой прямую 5 или изогнутую 6 (постоянного рационального радиуса больше радиуса ротора) пластину. Лопатка 5 либо проходит через все тело ротора 2 (по диагональной линии), либо расположена тангенциально в теле ротора (не показано). Противоположные стороны прямой лопатки 5, примыкающие к торцам, в процессе вращения ротора 2, выдвигаются в функциональную полость 8. Торцовые грани прямой 5 и изогнутой лопатки 6 могут быть прямыми или профильными, как кольцеобразный выступ 17. Опорная части прямой 5 и изогнутой 6, всегда будут кратно больше выдвинутой в функциональную полость 8. В средней части прямой лопатки бив соответственном месте изогнутой лопатки 6, на длинном торце выбранной стороны, имеется цилиндрический стержень 19 (штырь, шип, палец) или кольцо (не показано), на котором закреплены планки 20, входящие в пазы канала и прикрывающие канал (для прямой лопатки 5 - в пределах внутреннего обода полого вала ротора). Лопатки 5 (фиг. 4) (для ротора с двумя прямыми лопатками) расположены в теле ротора 2 (в каналах-направляющих 7) перпендикулярно друг другу и имеют вырез 21, обеспечивающий взаимное перемещение пересекающихся лопаток.
Выдвижное устройство (ВУ) (фиг. 1, 4) прямой лопатки 5 обеспечивает, согласованное с углом поворота ротора 2, движение лопатки 5, с возможностью выдвижения противоположных торцовых частей одной лопатки в различных местах рабочей полости (зоны) 13, в определенный момент вращения ротора 2, обеспечивая должное соприкосновение (прилегание) торца лопатки 5 с элементами уплотнения к профильной поверхности стенки 12. ВУ имеет в основе зубчато-кривошипный механизм, состоящий из вала ВУ 22, свободно закрепленного в корпусе (опора вала ВУ), кривошипа 23 вала ВУ и зубчатого колеса 24. Полый вал 4 ротора имеет, по внутреннему ободу, зубчатый венец 25, в зацепление которого входит зубчатое колесо 24 вала ВУ. Смещение зубчатого колеса 24 вала ВУ 22 (относительно оси ротора) определяет сторону наибольшего выдвижения лопаток 5 (возможен привод к зубчатому колесу 24 вала ВУ и от внешнего зубчатого венца полого вала 4 ротора, через соответствующие зубчатые колеса, размещенных в корпусе - не показано). Зубчатое колесо 24 вала ВУ 22 имеет диаметр и количество зубьев вдвое меньше, чем зубчатый венец 25 полого вала 4 ротора (соответствующее передаточное число). Рычаг кривошипа 23 ВУ соединен, в соответствующем месте, с элементом шарнира на торце лопатки. Шарнирное соединение может состоять из следующих элементов: рычага кривошипа 23 с проушиной (кольцом) 26 (с антифрикционной втулкой) и цилиндрического стержня 19 (штырь, шип), расположенного на длинном торце лопатки (фиг. 1, 2, 4), либо шипа рычага кривошипа и кольца на лопатке (не показано), либо проушины рычага и кольца на лопатке, соединенных пальцем, образуя шарнирное соединение (не показано). Длина рычага кривошипа 23, от осевой линии вала ВУ 22 до осевой линии отверстия проушины (кольца) 26, соответствует радиусу зубчатого колеса 24 вала ВУ (до средней линии). Внутреннее зацепление зубчатого колеса 24 вала ВУ с зубчатым венцом 25 полого вала 4 ротора обеспечивает вращение зубчатого колеса 24 (а также вала 22 ВУ и кривошипа 23) в направлении вращения ротора 2. При этом ось проушины 26 рычага кривошипа 23 будет всегда перемещаться (при вращении ротора) вдоль по определенной линии диаметра зубчатого венца 25 полого вала 4 ротора, от одного края к другому. Вдоль (параллельно) этой линии и размещен канал 7 в теле ротора 2 с лопаткой 5. При вращении ротора 2, рычаг кривошипа 23 ВУ, находящийся в шарнирной связи с лопаткой 5, начнет перемещать (возвратно-поступательно) последнюю вдоль канала на величину диаметра зубчатого венца 25 (средняя линия) полого вала 4 ротора. Данное ВУ, содержащее зубчато-кривошипный механизм, позволяет иметь лопатку 5, проходящую через все тело ротора 2 (по диагональной линии). Что ведет к кратному увеличении опорной части лопатки, чем выдвинутой. Для ротора, имеющего две лопатки (Фиг. 4, 5), ВУ будет индивидуально для каждой, и располагаться на противоположных торцовых сторонах ротора 2. При этом вал съема мощности (или согласующий вал) может входить в зацепление с наружным коническим зубчатым венцом полого вала ротора (не показано). Роторная машина, имеющая две лопатки 5 с одной рабочей полостью (фиг. 4, 5), позволяет увеличить количество рабочих ходов на оборот, а также реализовать два такта цикла одновременно в одном модуле (к примеру такт вытеснения, такт сжатия - расширения). Данный механизм ВУ обеспечивает, при минимальном диаметре ротора 2, максимальное значение опорной части лопаток (равное всегда почти диаметру ротора) и относительную максимальную величину этого выдвижения. На фиг. 1 показан случай, когда вал ВУ 22 выполняет еще и функцию согласовывающего вала, обеспечивающего совместное вращение роторов смежных модулей.
В выдвижных устройствах (фиг. 2) модулей с двумя и более рабочими полостями 13 (где в каналах в теле ротора тангенциально расположены изогнутые лопатки 6, с постоянным радиусом кривизны больше радиуса ротора), головка шатуна 27 ВУ имеет шарнирное соединение с цилиндрическим стержнем 19, расположенным на длинном изогнутом торце лопатки в соответствующем месте, и планки, закрепленной на стержне и прикрывающую открытую для хода шарнира сторону канала. Зубчатое колесо вала ВУ входит в зацепление зубчатого венца на неподвижном корпусе (не показано, привод ВУ как у прототипа). Возможно кратное соотношение рабочих полостей и лопаток (две полости-четыре лопатки), и не кратное (две полости - три лопатки), как у прототипа. Валы ВУ 22 могут проходить через тело ротора 2. Кривошипы 23 располагаются над лопатками внутри обода, с торцовых сторон ротора. Для ротора, имеющего четыре лопатки, кривошипы 23 противоположных лопаток располагаются на одной стороне, а смежные на другой стороне торца ротора 2. У ротора с тремя лопатками возможно расположение кривошипов на одной стороне торца ротора. Кривошип 23 с одного вала ВУ может использоваться (быть общим) для лопаток смежных роторов одного отдела для синхронного выдвижения лопаток. Максимальный вылет лопатки 6 может быть, как при максимальном вылете шатуна 27, так и при минимальном. ВУ обеспечивает выход изогнутой лопатки в рабочую полость как выпуклой, так и вогнутой гранью по направлению вращения, также и с учетом стороны меньшего или большего давления рабочего тела.
В двигателе возможно размещение модулей не на одном валу. Это позволяет более полно и рационально использовать объем, выделенный для размещения силовой установки, что повышает его компактность и улучшает доступность при ремонте и обслуживании. А также иметь наиболее выгодное соединение модулей, связывающими трубопроводами 28, что уменьшает газодинамические потери. Модули могут быть расположены относительно произвольно в пространстве, причем даже в разных плоскостях и согласуются между собой посредством зубчатых колес и валов (а в отдельных случаях цепной и ременной передачей), с применением шарнира равных угловых скоростей.
В двигателе допускается возможность иметь модули с разной частотой вращения, с учетом того, что частота вращения данного модуля будет обратно пропорционально объемам последующего или предыдущего по такту модуля. И рассчитанное количество РТ, проходящего через модули, за время общего такта, не меняется. Отсюда и подбор объема секций, с условием их последовательности и протекания в них соответствующего количества РТ согласно циклу.
Нефункциональные объемы внутри обода роторных машин могут иметь избыточное давление, соизмеримое с давлением рабочего тело (даже, возможно, того же газа). Внутриободное избыточное давление, в значительной мере, препятствует прорыву газов из рабочей зоны внутрь ротора и позволяет упростить уплотнения в двигателе.
Порядок работы роторной машины (с прямыми лопатками) в качестве двигателя (фиг. 3) следующий: при вращении ротора 2, ВУ организует, согласованное с углом поворота ротора, выдвижения лопатки 5 в функциональную полость 8, обеспечивая должное прилегание торца лопатки (с элементами уплотнения) к профильной поверхности стенки 12 функциональной полости. И с возможностью нахождения, в одной и той же функциональной полости 8, одновременно противоположных торцовых частей лопатки 5. Рабочее тело через впускное окно 9 поступает в функциональную полость 8. Выдвинутая левая торцовая часть лопатки 5, в рабочей зоне 13, воспринимая давление рабочего тела задней гранью, приводит во вращательное движение ротор 2, а передней гранью выталкивает РТ предыдущего такта в выпускное окно 10. По мере вращения ротора 2, правая (противоположная) торцовая часть лопатки 5, находясь в той же функциональной полости 8, начинает проходить зону 14 впускного окна. При дальнейшем вращении ротора 2, в момент, когда левая торцовая часть лопатки еще не вышла в зону 15 выпускного окна, противоположная уже прошла зону 14 впускного окна и торцовой гранью контактирует с профильной стенкой 12 рабочей зоны (полости) 13 функциональной полости. И с этого момента уже правая торцовая часть лопатки 5 начинает воспринимать давление рабочего тела и совершать работу. А рабочее тело, заключенное между выдвинутыми частями лопатки, будет изолировано в рабочей полости (зоне) 13 на некоторое время (определенный момент), не допуская при этом сквозного перетекания рабочего тела через функциональную полость 8. В дальнейшем, левая торцовая часть лопатки, задвигаясь, переходит в зону 15 выпускного окна, и уже правая торцовая часть лопатки, передней гранью, начинает выталкивать рабочее тело в выпускное окно 10. Левая торцовая часть лопатки, полностью задвинувшись, затем заходит в зону перехода 11. В последующем (пройдя переход 11) данная часть лопатки 5 снова входит в функциональную полость, и процесс повторяется, обеспечивая равномерное вращательное движение главному рабочему элементу - ротору.
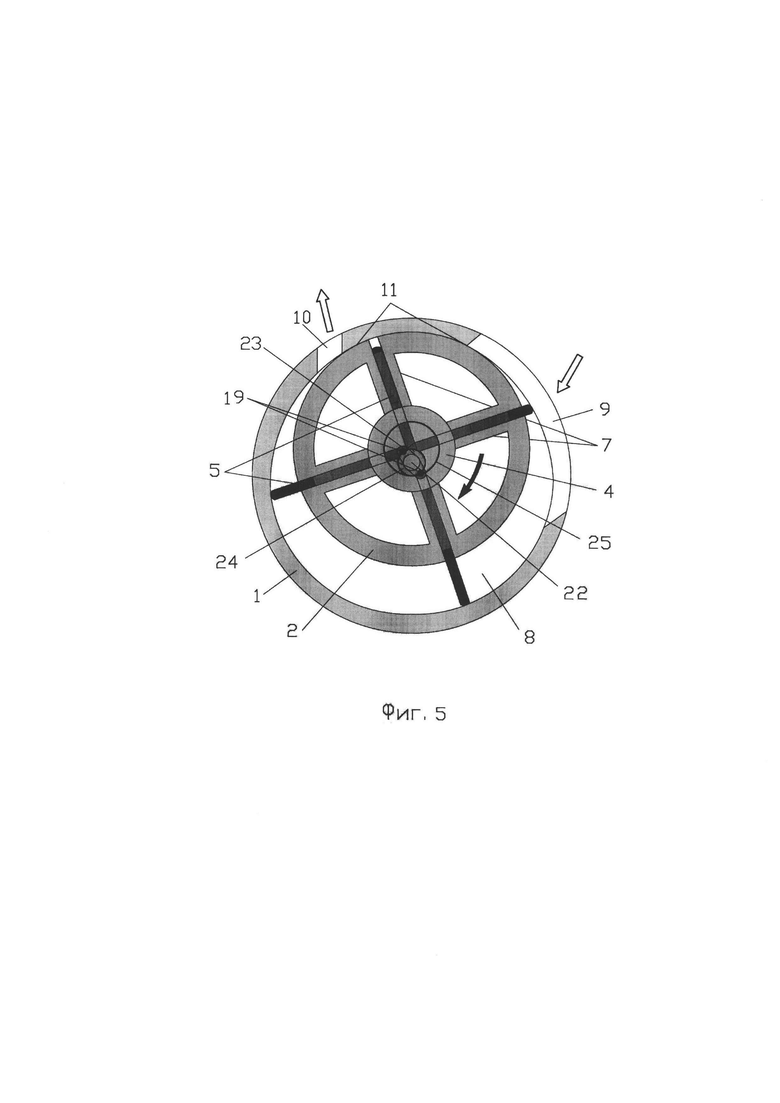
Порядок работы роторный машины с одной рабочей полостью и с двумя лопатками (фиг. 5) определяется тем, что в рабочей полости могут находится три торцовых частей двух лопаток (при осуществлении двух тактов в одном модуле). В рабочей полости (зоне) 13, между левой выдвинутой торцовой частью одной лопатки и последующей торцовой частью другой лопатки, изолированно рабочее тело. При дальнейшем вращении ротора, до достижения левой торцовой части первой лопатки выпускного окна 10, в следствии уменьшения объема, происходит сжатие рабочего тела (до нужного значения). А между выдвинутой торцовой частью второй лопатки и противоположной торцовой частью первой лопатки (уже прошедшей впускное окно), изолировано рабочее тело в заданном объеме. В дальнейшем повторяется (уже указанный) процесс сжатия рабочего тела. Это позволяет реализовать два разных такта цикла в одном модуле, на базе единой роторной машины (исключить один модуль). В определенных случаях, при построении двигателя на базе роторной машины с двумя лопатками, можно увеличить (удвоение) количество рабочих тактов, при этом рабочая зона 13 сужена на участке наибольшего объема. Порядок работы роторной машины с двумя (и более) рабочими полостями и тангенциально расположенными криволинейными лопатками аналогичен прототипу.
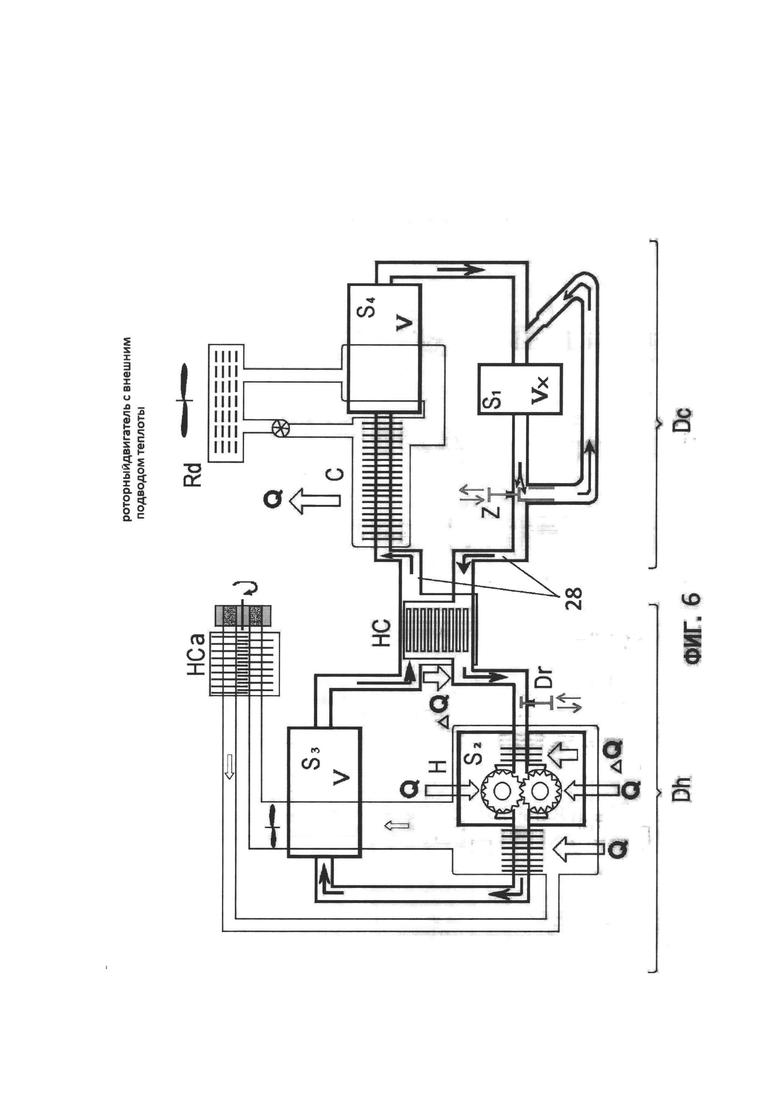
Построение двигателя, как комбинации нескольких модулей-секций (на базе роторной машины), с подобранными параметрами и соответственными зонами нагрева и охлаждения, каждый из которых реализует определенный такт цикла, позволяет задать любой (замкнутый, открытый) термодинамический цикл его работы, к примеру: Стирлинга, Эриксона и т.д. (с учетом параметров рабочего тела, конструкционных материалов и используемого топлива). И ограниченны только рациональностью и здравым смыслом, что показывает гибкость данной конструкции. При построении двигателя, состоящего из модулей на базе роторных машин с выдвигающимися лопатками и (или) Ванкеля, возможно иметь модули с другим типом роторных машин, как объемного, так и динамического действия (расширения, вытеснения, сжатия). Для определенных тактов рациональнее использовать роторно-шестеренчатые машины (внешнего, внутреннего зацепления), роторно-винтовые (цилиндрический и конусный Лисхольм) и турбины. Все указанные типы роторных машин способны поддерживать непрерывное, равномерное и однонаправленное движение РТ в двигателе, и обеспечивают сквозное прохождение РТ через модуль, что позволяет значительно уменьшить зависимость от мертвых объемов. Двигатель с внешним подводом теплоты замкнутого цикла (фиг. 1, 6) составлен из модулей (секций) Si (где i=1, 2…k.), где определенный модуль может содержать роторную машину с выдвигающимися лопатками. И, соответственно, имеет функциональную полость определенного (условного) объема Vi,. При этом другие модули, осуществляющие определенные такты, могут содержать роторные машины других типов. Двигатель состоит из двух, четко разделенных зон. Одна - нагревается (горячая) Dh, а другая - охлаждается (холодная) Dc. Участки корпуса и ротора, принадлежащие к разным частям, теплоизолированы и разнесены в пространстве друг от друга. Выпускные окна 10 полостей одной секции (Si) последовательно соединены трубопроводами 28 с впускными окнами 9 другой Si+1 (последующей по циклу). Подвод тепла к рабочему телу происходит в нагревателе Н от любого источника тепла (в представленном двигателе - горелки). Охлаждение рабочего тела осуществляется в холодильнике С, посредством охлаждающей жидкости (или другим способом), с последующим отводом тепла через радиатор (Rd). Нагрев и охлаждение, также могут захватывать стенки модулей, в соответствии с расположением последних в определенных зонах двигателя. В определенном месте (в соответствии с термодинамическим циклом), в разрез трубопроводов 28 противонаправленных потоков рабочего тела, вставлены теплообменники НС, рекуператор, или дисковый регенератор (не показано). Для регулировки мощности, совместно с изменением интенсивности выделения тепла нагревателем, служит золотник Z, управляемый посредством штока и перепускной канал, соединяющий выпускной трубопровод секции S1 с впускным, или даже с впускным трубопроводом секции S4. Выдвигаясь, при регулировании, золотник отсекает часть потока рабочего тела, выходящего из модуля холодного отдела и следующего в горячий, возвращая эту часть потока во входящий трубопровод данного модуля, или во входящий трубопровод первого модуля (S4) холодной части двигателя. Тем самым определяется количество рабочего тела, проходящего через зону нагрева, что и, соответственно, влияет на изменение мощности с высокой степенью реакции. Это действие выполняет и дроссель Dr, кроме того, он может участвовать в пуске двигателя для повышения давления на соответствующем участке системы. Также для регулирования (повышение мощности) можно использовать ресивер (не показано), из которого, в нужный момент, определенное количество РТ поступает в систему (с последующим возвратом при установившимся режиме или снижении мощности). Подвод воздуха к горелкам (для источников тепла, требующих окислитель) может происходит посредством нагнетателя, через теплообменник НСа, который встроен в противонаправленные каналы подвода воздуха и отвода отработанных газов. Такая обвязка, с подогревом подводимого воздуха к горелкам, позволяет уменьшить тепловые потери. На фиг. 6 показан пример возможного построения двигателя, реализующего цикл Стирлинга, который, на всех этапах цикла, использует только газообразное рабочее тело, с четырьмя модулями и с использованием рекуператора. Каждая часть двигателя (горячая, холодная) состоит из двух модулей (секций) Si разного типа роторных машин. Количество РТ, проходящего через каждый модуль (с любым типом роторной машины) за такт, равное (в установившимся режиме). Такт расширения наиболее рационален для роторной машины с выдвигающимися лопатками или роторной машины Ванкеля. Относительно длительный такт (почти на порядок продолжительнее поршневой машины) позволяет более полно использовать энергию РТ. Так модули S3 и S4 содержат роторную машину с выдвигающимися лопатками (или машину Ванкеля), имеют равный условный объем V, и расположены в «горячем» и «холодном» отделе двигателя соответственно. Такт сжатия (компрессия) и вытеснения целесообразнее осуществлять малообъемными модулями с двумя выдвигающимися лопатками, роторно-шестеренными машинами или роторной машиной Ванкеля, с пропорционально большими оборотами, чем модуль расширения (с одной лопаткой). Они обеспечивают сжатие РТ на выходе модуля малыми порциями (тактами на порядок короче такта предыдущего модуля), и с незначительным отличием температуры выхода от температуры входа. А это ведет к увеличению КПД теплообменника (и в целом КПД двигателя). И если модуль S1 (холодный отдел) создан на базе малообъемной роторной машины с двумя выдвигающимися лопатками (с пропорционально повышенными оборотами) и условным объемом Vx, то он выполняет функции вытеснения и компрессии. Тем самым, в определенных случаях, данный модуль может и совмещать функции вытеснения модуля S4 (и замещать последний) и выполнять (следующим тактом) функции компрессора (два смежных такта в одном модуле). А модуль S2 (горячий отдел, реализующий такт вытеснения) предпочтительней строить на базе роторно-шестеренных или роторно-винтовых машин, с определенными параметрами и оборотами (с учетом прохождения равного количества РТ за такт через модули). Прохождение рабочего тела показано на схеме, а в рабочей полости - описан выше (описание работы). Возможны различные комбинации с модулями согласно выбранного цикла (включающего или исключающего определенные такты, и соответственные им модули), на базе указанных роторных машин (шестеренные, винтовые, турбо), которые имеют относительно малые габариты, отличаются надежностью и относительно простым устройством.
Заявляемый двигатель с внешним подводом теплоты, также может быть в качестве паровой машины, и как двигатель, использующий смешанное двухкомпонентное рабочее тело (одно из которых меняет свою агрегатное состояние в течении цикла). И обладает более надежной, простой технологичной конструкцией, является более экономичным, с высокой удельной мощностью и КПД. А роторная машина, так же может использоваться и в качестве насоса или движителя.
Список обозначений
1 - корпус; 2 - ротор; 3 - вал ротора; 4 - полый вал ротора; 5 - лопатка прямая; 6 - лопатка изогнутая; 7 - каналы-направляющие; 8 - функциональная полость; 9 - впускное окно; 10 - выпускное окно; 11 - зона перехода (перегородка); 12 - профильная стенка; 13 - рабочая зона (полость); 14 - зона впускного окна; 15 - зона выпускного окна; 16 - обод ротора; 17 - кольцеобразный выступ; 18 - крышка полого вала ротора; 19 -цилиндрический стержень (штырь); 20 - защитная планка; 21 - вырез в лопатке; 22 - вал ВУ; 23 - кривошип ВУ; 24 - зубчатое колесо вала ВУ; 25 - зубчатый венец полого вала ВУ; 26 - проушина (кольцо); 27 - шатун; 28 - трубопроводы; Si - модуль (секция); Vi - условный объем; Dh - горячая часть двигателя; Dc -холодная часть двигателя; Н - нагреватель; С - холодильник; Rd - радиатор; НС теплообменник (рекуператор); НСа - теплообменник воздушный; Z - золотник; Dr - дроссель.
Изобретение относится к тепловым двигателям роторного типа. Двигатель с внешним подводом теплоты составлен из одного или, как комбинация, нескольких модулей на базе роторной машины, с подобранными параметрами для определенного модуля, с зонами нагрева и охлаждения, где определенный модуль реализует соответствующий такт заданного замкнутого или открытого термодинамического цикла работы двигателя, и последовательно соединенного, соответственно, элементами впускного-выпускного тракта, включающими трубопроводы и теплообменники, при последовательном непрерывно-равномерно-однонаправленном потоке рабочего тела в двигателе, с возможным применением регенератора или рекуператора. Роторная машина определенного модуля содержит неподвижный корпус 1, с выполненными в нем канавками, жестко посаженный на вал 3 ротор 2, и выдвижное устройство (ВУ). Канавки с ободом 16 ротора 2 образуют полости 8, которые имеют впускные окна 9 и выпускные окна. Ротор 2 выполнен в виде колеса с ободом 16, имеющим кольцеобразный выступ 17, соответствующий профилю канавок корпуса 1. В теле ротора 2 в изолированных от внутриободного пространства каналах-направляющих 7 расположены изогнутые лопатки или прямые лопатки 5, имеющие шарнирное соединение с элементами ВУ, которое обеспечивает, согласованное с углом поворота ротора 2, движение лопатки и должное прилегание торца лопатки с элементами уплотнения к профильной поверхности стенки 12 корпуса 1. Роторная машина с выдвигающимися лопатками содержит либо ротор 2 с изогнутыми лопатками с постоянным радиусом кривизны больше радиуса ротора 2 в тангенциально расположенных каналах-направляющих 7, головка шатуна ВУ имеет шарнирное соединение с цилиндрическим стержнем 19, расположенным на торце лопатки, с планками 20, закрепленными на стержне 19, которые прикрывают открытую для хода шарнира сторону канала-направляющего 7, либо ротор 2, имеющий не более двух прямых лопаток 5 в радиально расположенных каналах-направляющих 7, каждая из которых проходит через все тело ротора 2 и имеет выходы для лопаток с двух противоположных сторон ротора 2 по диагональной линии, ВУ построено на базе зубчато-кривошипного механизма. Вал 22 ВУ модуля индивидуальный для каждой лопатки, свободно закреплен в корпусе 1 двигателя и смещен в сторону наибольшего выдвижения лопатки. Зубчатое колесо 24 вала 22 ВУ входит в зацепление с зубчатым венцом 25 на внутреннем ободе 16 полого вала 4 ротора 2 и имеет диаметр и количество зубьев вдвое меньше, чем зубчатый венец 25 полого вала 4 ротора 2. Рычаг кривошипа 23 ВУ соединен с элементом шарнира на торце лопатки. Модули с ротором 2, содержащим две, пересекающие под прямым углом лопатки и имеющие одну функциональную полость 8, осуществляют два различных такта или удвоение рабочих тактов на оборот. Изобретение направлено на повышение эффективности в использовании энергии газов и, соответственно, КПД, увеличение удельной мощности и уменьшение габаритов двигателя, повышение надежности, удобство в обслуживании и ремонте. 1 з.п. ф-лы, 6 ил.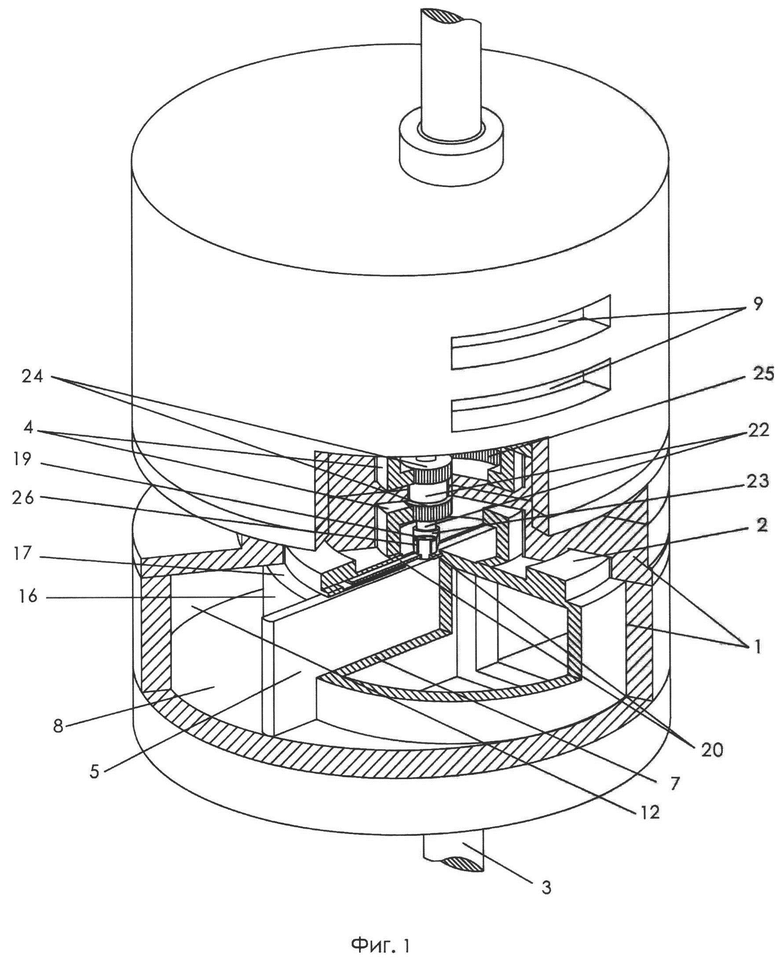
1. Двигатель с внешним подводом теплоты, составленный из одного или, как комбинация, нескольких модулей на базе роторной машины, с подобранными параметрами для определенного модуля, с зонами нагрева и охлаждения, где определенный модуль реализует соответствующий такт заданного замкнутого или открытого термодинамического цикла работы двигателя, и последовательно соединенного, соответственно, элементами впускного-выпускного тракта, включающими трубопроводы и теплообменники, при последовательном непрерывно-равномерно-однонаправленном потоке рабочего тела в двигателе, с возможным применением регенератора или рекуператора, при этом роторная машина определенного модуля содержит неподвижный корпус, с выполненными в нем канавками, жестко посаженный на вал ротор, и выдвижное устройство (ВУ), причем канавки с ободом ротора образуют полости, которые имеют впускные и выпускные окна, а ротор выполнен в виде колеса с ободом, имеющим кольцеобразный выступ, соответствующий профилю канавок корпуса, в теле ротора, в изолированных от внутриободного пространства каналах-направляющих расположены изогнутые или прямые лопатки, имеющие шарнирное соединение с элементами ВУ, которое обеспечивает, согласованное с углом поворота ротора, движение лопатки и должное прилегание торца лопатки с элементами уплотнения к профильной поверхности стенки корпуса, отличающийся тем, что двигатель составленный из модуля или модулей на базе роторной машины с выдвигающимися лопатками, которая содержит либо ротор с изогнутыми лопатками с постоянным радиусом кривизны больше радиуса ротора в тангенциально расположенных каналах-направляющих, при этом головка шатуна ВУ имеет шарнирное соединение с цилиндрическим стержнем, расположенным на торце лопатки, с планками, закрепленными на стержне, которые прикрывают открытую для хода шарнира сторону канала-направляющего, либо ротор имеющий не более двух прямых лопаток в радиально расположенных каналах-направляющих, каждая из которых проходит через все тело ротора и имеет выходы для лопаток с двух противоположных сторон ротора по диагональной линии, ВУ построена на базе зубчато-кривошипного механизма, при этом вал ВУ модуля индивидуальный для каждой лопатки, свободно закреплен в корпусе двигателя и смещен в сторону наибольшего выдвижения лопатки, а зубчатое колесо вала ВУ входит в зацепление с зубчатым венцом на внутреннем ободе полого вала ротора и имеет диаметр и количество зубьев вдвое меньше, чем зубчатый венец полого вала ротора, причем рычаг кривошипа ВУ соединен с элементом шарнира на торце лопатки, а модули с ротором, содержащим две, пересекающие под прямым углом лопатки и имеющие одну функциональную полость, осуществляют два различных такта или удвоение рабочих тактов на оборот.
2. Двигатель по п. 1, отличающийся тем, что выполнен с возможностью содержания модулей на базе роторных машин различных типов, модули выполнены с возможностью разной частоты вращения и произвольного расположения в отсеке для силовой установки, а также в разных плоскостях, согласуясь между собой посредством зубчатых колес и валов.
| Роторная машина силовой установки с внешним подводом теплоты (варианты) | 2019 |
|
RU2731466C1 |
| РОТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ ЭНЕРГИИ И ДВИГАТЕЛЬ ВНЕШНЕГО СГОРАНИЯ С ЕГО ИСПОЛЬЗОВАНИЕМ | 2010 |
|
RU2454546C2 |
| Роторный двигатель Стирлинга | 2015 |
|
RU2625071C2 |
| US 9797339 B2, 24.10.2017 | |||
| JPS60101250 A, 05.06.1985 | |||
| US 4225293 A, 30.09.1980 | |||
| Трубопровод | 1979 |
|
SU857652A2 |

