Изобретение относится к управлению пассивным протезом коленного сустава с регулируемой амортизацией в направлении сгибания для адаптации протеза с присоединительными средствами на верхней стороне и элементом соединения с искусственной стопой, закрепленными на протезе, к ходьбе вверх по лестнице.
Пациентам, которым требуется протез коленного сустава, приходится при настройке своего протеза в отношении амортизации сгибания и разгибания идти на компромисс, поскольку пассивные протезы коленного сустава оптимизированы только для определенных применений, так что значительно отличающийся характер движения невозможен или чрезвычайно затруднен. Так, процесс ходьбы в плоскости, на которую рассчитано большое число пассивных протезов коленного сустава с амортизацией сгибания и разгибания, требует существенно иной амортизирующей характеристики, нежели ходьба вверх по лестнице. Поэтому ходьба вверх по лестнице с традиционными протезами коленного сустава происходит таким образом, что, стоя перед лестницей, носитель протеза поднимает здоровую ногу на первую ступень и подтягивает на ту же ступень контралатеральную ногу. Увеличение скорости ходьбы может достигаться, при необходимости, за счет постановки здоровой ноги на каждую вторую ступень, что, однако, очень утомительно.
Задачей настоящего изобретения является создание управления пассивным протезом коленного сустава, которое обеспечивало бы пациенту чередующийся подъем по лестнице. Согласно изобретению эта задача решается посредством способа управления пассивным протезом коленного сустава с регулируемой амортизацией в направлении сгибания для адаптации протеза с присоединительными средствами на верхней стороне и элементом соединения с искусственной стопой, закрепленными на протезе, к ходьбе вверх по лестнице, включающего:
- детектирование нагрузок, действующих на протез в процессе подъема стопы при ходьбе вверх по лестнице (далее низкомоментный подъем протеза стопы) и
- уменьшение амортизации сгибания на фазе подъема ниже уровня, подходящего для ходьбы в плоскости.
Предпочтительные варианты и модификации изобретения заключаются в следующем:
- амортизацию разгибания и/или сгибания на фазе постановки протеза стопы и распрямления тазобедренного сустава повышают до уровня выше амортизации управления фазой переноса ноги для ходьбы в плоскости;
- амортизацию сгибания на фазе постановки протеза стопы повышают до максимального значения;
- амортизацию сгибания на фазе постановки протеза стопы и распрямления тазобедренного сустава сохраняют до полного распрямления тазобедренного сустава;
- амортизацию сгибания повышают в зависимости от изменения угла коленного сустава;
- амортизацию сгибания повышают или уменьшают в зависимости от действующего на стержень голени осевого усилия;
- амортизацию разгибания настраивают на фазе подъема и постановки протеза стопы и распрямления тазобедренного сустава;
- детектирование низкомоментного подъема осуществляют посредством датчика усилия или момента;
- детектирование низкомоментного подъема осуществляют посредством измерения горизонтального ускорения протеза стопы и определения сгиба протеза коленного сустава;
- детектирование низкомоментного подъема осуществляют посредством определения момента плюсны в протезе стопы;
- поддержку сгибания на фазе подъема протеза стопы осуществляют посредством натяженного пружинного механизма;
- повышение амортизации сгибания и разгибания начинают после повторной постановки протеза ступни после подъема;
- постановку протеза стопы детектируют посредством изменения осевого усилия в стержне голени или в протезе стопы;
- амортизацию сгибания на фазе подъема протеза стопы уменьшают до минимального значения;
- после уменьшения амортизации сгибания свободное разгибание настраивают с управлением временем;
- свободное разгибание поддерживают с помощью пружины;
- управление временем осуществляют механическим или электронным путем.
Невозможно также балансирование при опускании снабженной протезом ноги, поскольку три сустава, а именно голеностопный, коленный и тазобедренный, расположены друг над другом, и носитель протеза может непосредственно управлять только тазобедренным суставом. Уже при подъеме протеза стопы для достижения следующей ступени лестницы возникает та проблема, что протез стопы направляется к подступенку или к нижней кромке следующей ступени, поскольку необходимая амортизация сгибания при управлении фазой переноса ноги для ходьбы в плоскости делает невозможным достижение верхней стороны следующей ступени. Предусмотренные в активных протезах коленного сустава сгибательный привод для подъема стопы и разгибательный привод при разгибании колена и подъема туловища посредством снабженной протезом ноги очень сложны и очень тяжелы. Кроме того, управление фазой переноса ноги для ходьбы в плоскости сильно ограничено у этих активных протезов коленного сустава.
При предложенном в изобретении управлении пассивным протезом коленного сустава с регулируемой амортизацией в направлении сгибания для адаптации протеза с присоединительным средством на верхней стороне и элементом соединения с искусственной стопой, закрепленными на протезе, к ходьбе вверх по лестнице прежде всего предусмотрено детектирование низкомоментного подъема протеза стопы. После детектирования низкомоментного подъема протеза стопы амортизация сгибания на фазе подъема уменьшается, а именно ниже уровня, подходящего или оптимизированного для ходьбы в плоскости. За счет снижения сопротивления сгибанию путем уменьшения амортизации сгибания можно достичь при подъеме угла колена, который позволяет ступить протезом стопы на следующую ступень. При сгибании тазобедренного сустава и низкомоментном подъеме протеза стопы за счет инерции его массы может быть достигнут угол колена пассивного протеза коленного сустава, которого при переносе бедра или при соответствующем разгибании за счет силы тяжести достаточно, чтобы преодолеть кромку ступени и позиционировать протез стопы над ступенью. При этом предпочтительно распределить массу в протезе так, чтобы центр тяжести массы был расположен максимально дистально, например в элементе соединения с протезом стопы или в самом протезе стопы. Для этого, например, блок управления коленным суставом может быть расположен дистально, а не вблизи него, так что без увеличения веса протеза за счет дополнительных грузов в протезе стопы при его низкомоментном подъеме достигается желаемый эффект сгибания колена.
После уменьшения амортизации сгибания на фазе постановки протеза стопы и распрямления тазобедренного сустава, на которой снабженная протезом нога распрямляется, амортизация сгибания и, при необходимости, амортизация разгибания повышается до уровня выше амортизации управления фазой переноса ноги для ходьбы в плоскости, так что может происходить контролируемое разгибание или распрямление тазобедренного, коленного и голеностопного суставов.
После преодоления кромки ступени колено за счет силы тяжести распрямляется. Чтобы обеспечить позиционирование находящегося над ступенью протеза стопы, амортизация сгибания перед распрямлением протеза коленного сустава повышается, так что позиционирование протеза стопы может осуществляться за счет непосредственно контролируемого носителем протеза угла тазобедренного сустава.
Амортизация сгибания повышается на фазе постановки протеза стопы и, при необходимости, распрямления тазобедренного сустава предпочтительно до максимального значения, чтобы уменьшить или предотвратить уменьшение при недостаточном моменте распрямления тазобедренного сустава. При этом предусмотрено, что амортизация сгибания на фазе постановки протеза стопы и распрямления тазобедренного сустава сохраняется вплоть до полного распрямления тазобедренного сустава.
Для облегчения позиционирования протеза стопы предусмотрено, что амортизация разгибания на фазе подъема, постановки протеза стопы и распрямления тазобедренного сустава регулируется, чтобы на фазе подъема избежать обусловленного силой тяжести распрямления протеза коленного сустава или падения вниз протеза стопы и чтобы на фазе постановки протеза стопы и распрямления тазобедренного сустава можно было контролируемым образом поставить протез стопы. Если бы амортизация разгибания на фазе распрямления тазобедренного сустава полностью отсутствовала, то носитель протеза был бы неестественным образом подброшен вверх, что привело бы к толчку и резкому прерыванию максимального разгибания коленного сустава. Подъем протеза стопы без амортизации разгибания может привести в случае открытых лестниц, т.е. без подступенка, к тому, что протез стопы попадает под следующую ступень.
Амортизация разгибания повышается предпочтительно в зависимости от изменения угла колена. Как только будет достигнут установленный угол колена, который, как правило, больше угла колена, подходящего при управлении фазой переноса ноги для ходьбы в плоскости, амортизация разгибания повышается. В качестве альтернативы или дополнительно амортизация разгибания может повышаться или уменьшаться в зависимости от действующего на стержень голени осевого усилия. Уменьшение осевого усилия в достаточно быстрой степени приблизительно до нуля при почти распрямленном колене является индикатором начала процесса ходьбы вверх по лестнице.
В качестве альтернативы или дополнительно вертикальное ускорение ноги, т.е. бедра или голени и тазобедренного сустава, при одновременном уменьшении осевого усилия может происходить в результате активирования соответствующего управления амортизацией сгибания и разгибания для ходьбы вверх по лестнице. Кроме того, достаточно быстрый сгиб тазобедренного сустава при небольшом или отсутствующем осевом усилии может вызвать сгиб колена. Вместо осевого усилия можно определять момент распрямления колена, момент лодыжки или комбинацию усилий и моментов, чтобы обеспечить режим ходьбы вверх по лестнице.
Детектирование низкомоментного подъема может осуществляться чисто механически с помощью щупа или датчика усилий или моментов. Щуп может быть выполнен, например, в виде установленного в направляющей движка, который только при почти вертикальном подъеме протеза стопы перемещается в положение включения, уменьшающее амортизацию сгибания. Измерение усилий или моментов может осуществляться посредством известных сенсорных устройств. В качестве альтернативы низкомоментный подъем может происходить за счет измерения горизонтального ускорения протеза стопы и определения сгиба коленного сустава. При небольшом горизонтальном ускорении протеза стопы, т.е. при почти вертикальном подъеме, иначе, чем при ходьбе в плоскости, происходит сильный сгиб протеза коленного сустава, что является индикатором ходьбы вверх по лестнице. Кроме того, может происходить определение момента плюсны в протезе стопы, чтобы установить, хотел бы пациент во время ходьбы двигаться в горизонтальном направлении, что вызывает очень высокую нагрузку на плюсну в протезе стопы, или происходят ли при поставленном протезе стопы уменьшение осевого усилия и сгибание коленного сустава.
Чтобы достичь необходимого сгибания для преодоления высоты ступени после подъема, на фазе подъема натяженная пружина или другой энергоаккумулирующий механизм может поддерживать сгибание. Также может быть предусмотрена поддерживающая свободное разгибание пружина, если после уменьшения амортизации сгибания прошло определенное время. Это требуется по соображениям безопасности, чтобы при ошибочном инициировании режима ходьбы вверх по лестнице не произошло нежелательного управления амортизацией.
Повышение амортизации сгибания и, при необходимости, разгибания осуществляется предпочтительно тогда, когда протез стопы снова ставится после подъема, например когда определяется повышение осевого усилия. В качестве альтернативы амортизация сгибания и разгибания может повышаться при остающемся приблизительно постоянным угле коленного сустава.
Амортизации сгибания может уменьшаться на фазе подъема до минимального значения, так что эффективная в каждой системе амортизация из-за трения больше не повышается.
Детектирование как низко- или безмоментного повышения, так и уменьшения амортизации сгибания может осуществляться механически, как и изменение различных амортизаций, чтобы обеспечить как можно более простую конструкцию протеза.
Ниже пример осуществления изобретения более подробно поясняется со ссылкой на чертежи, на которых схематично изображен процесс чередующейся ходьбы вверх по лестнице с пассивным протезом коленного сустава.
На фиг.1 изображен носитель 1 протеза 2 коленного сустава, закрепленного на культе бедра с помощью присоединительных средств на верхней стороне. Искусственная нога 20 вместе со здоровой контралатеральной ногой 4 находится перед ступенью лестницы.
Для достижения следующей ступени протез 6 стопы следует направить вокруг кромки ступени. Активный сгиб тазобедренного сустава, обозначенный стрелкой 7, поддерживает пассивный сгиб коленного сустава, который обозначен стрелкой 8 и вызван инерцией масс как протеза 6 стопы, так и соединительного элемента 3 от протеза 2 коленного сустава к протезу 6 стопы. Для этого необходима минимальная амортизация сгибания, чтобы после сгибания тазобедренного сустава протез 6 стопы не был перенесен вперед и не уперся в подступенок или не попал под ступень 5. Целью является ведение максимально вертикально вверх протеза 6 стопы на фазе подъема, показанной на фиг.2, при необходимости за счет легкого движения назад. Детектирование подъема осуществляется при этом за счет угла α сгиба между соединительным элементом 3 и бедром или за счет уменьшения осевого усилия в соединительном элементе 3 без сгибания протеза 6 стопы. Также можно детектировать режим ходьбы вверх по лестнице и за счет этого уменьшение амортизации сгибания до значения ниже нормального управления фазой переноса ноги, предпочтительно до минимального значения, за счет горизонтального движения протеза 6 стопы назад в сочетании со сгибом тазобедренного сустава.
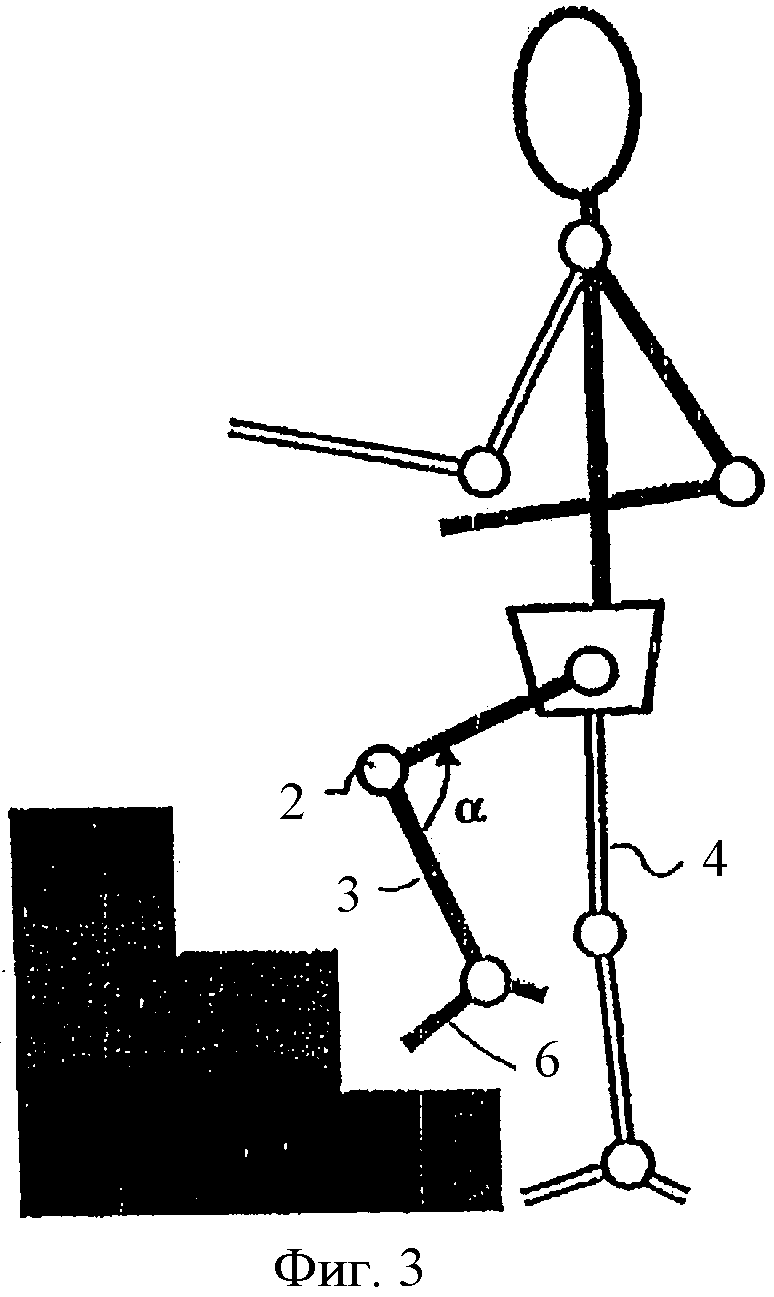
После преодоления кромки ступени и окончания фазы подъема, показанной на фиг.2, требуется надежное позиционирование протеза 6 стопы на ступени. Для этого протез 6 стопы следует переместить вперед, что может происходить за счет разгибания на основе силы тяжести. Для этого можно уменьшить амортизацию разгибания, если этого уже не произошло на фазе подъема. Протез 2 коленного сустава, достаточно амортизированный в сгибании и разгибании перед распрямлением, обеспечивает позиционирование протеза 6 стопы носителем 1 протеза за счет изменения угла сгиба тазобедренного сустава. На фазе опускания и распрямления тазобедренного сустава сгибание и разгибание предпочтительно сильно амортизированы, чтобы помимо контроля постановки протеза стопы предотвратить также спонтанное падение назад при недостаточном моменте распрямления тазобедренного сустава. Разгибание остается амортизированным, чтобы можно было контролировать скорость при распрямлении тазобедренного и коленного суставов. Это показано на фиг.3.
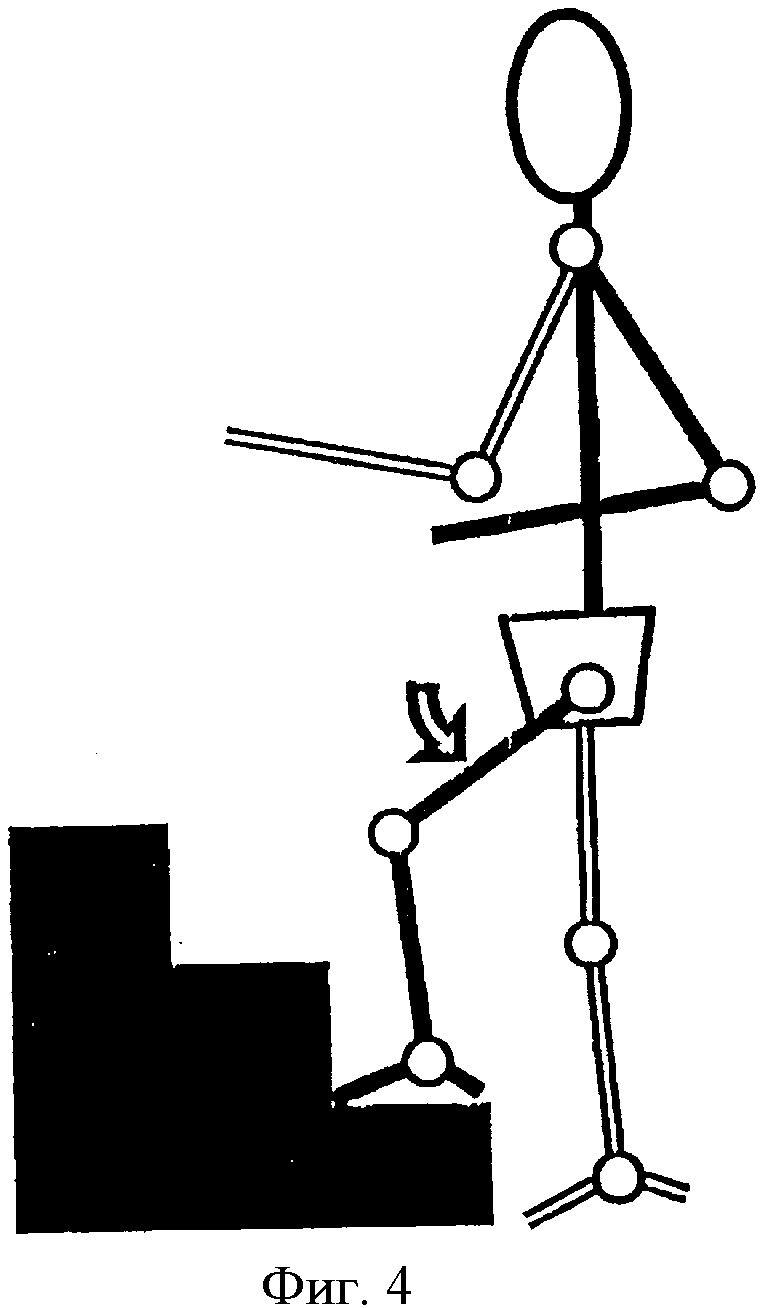
На фиг.4 фаза постановки протеза 6 стопы завершена. Носитель 1 протеза может начинать распрямление коленного сустава с моментом распрямления тазобедренного сустава. Распрямление коленного сустава может поддерживаться разгибанием здоровой стопы.
На фиг.5 показано возрастающее распрямление коленного сустава за счет приложения момента тазобедренного сустава. Возрастающее распрямление коленного сустава укорачивает эффективный рычаг и облегчает распрямление коленного сустава за счет распрямления тазобедренного сустава.
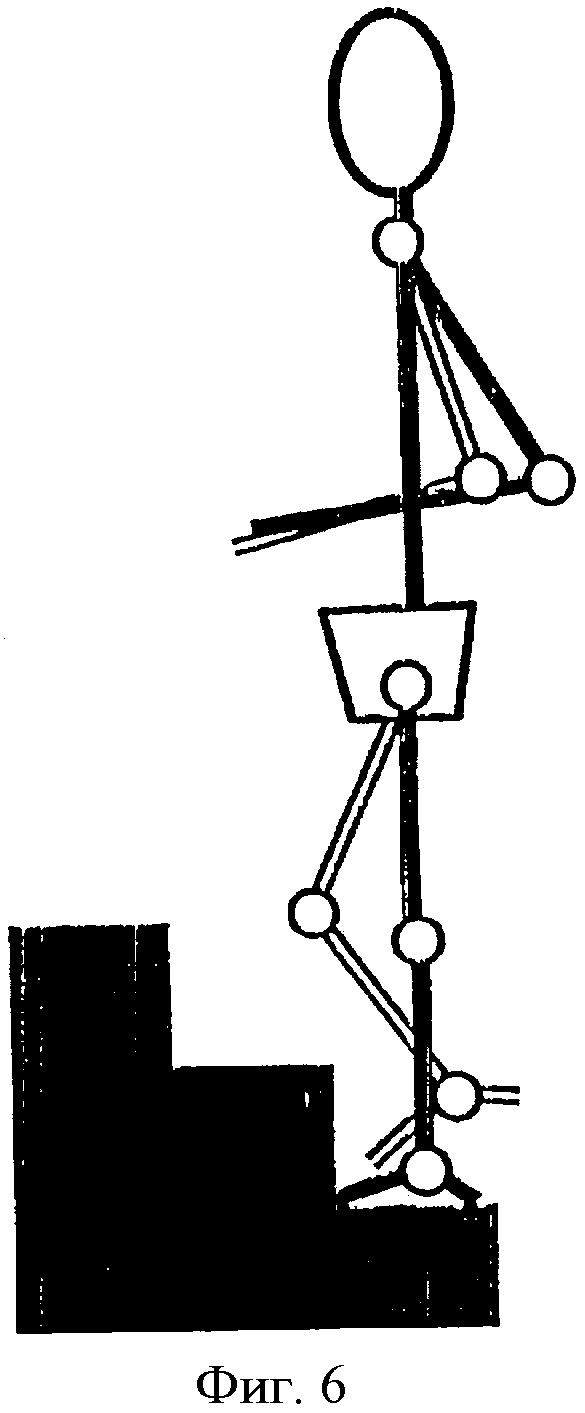
На фиг.6 показано полное разгибание снабженной протезом 2 коленного сустава ноги. Контралатеральная нога 4 направляется мимо искусственной ноги 20 и ставится на следующую ступень, в результате чего возможна чередующаяся ходьба вверх по лестнице с пассивным протезом коленного сустава.
Управление настроено, следовательно, так, что во время подъема протеза 6 стопы устанавливается сопротивление сгибанию, которое допускает угол α коленного сустава, обеспечивающий постановку протеза 6 стопы на следующую ступень. Поддержка сгибания за счет пружинных механизмов может облегчить подъем и преодоление высоты ступени.
Если после инициирования режима ходьбы вверх по лестнице за счет детектирования низкомоментного подъема не последует никакого действия, то настраивается свободное разгибание, причем настройка свободного разгибания происходит в зависимости от времени. Управление временем может осуществляться также механически. Детектирование низкомоментного подъема может осуществляться за счет инерции масс, когда сначала ставится здоровая нога, и лишь снабженная протезом нога должна затем преодолеть вторую ступень. Если сначала происходит разгрузка протеза стопы, а затем сгиб протеза коленного сустава, то настраивается ходьба вверх по лестнице. Амортизация как в направлении разгибания, так и в направлении сгибания после фазы подъема, т.е. на фазе распрямления тазобедренного сустава, сохраняется, пока не будет достигнуто или детектировано полное разгибание протеза коленного сустава.


Изобретение относится к области медицины, в частности к управлению пассивным протезом коленного сустава. Способ управления пассивным протезом коленного сустава с регулируемой амортизацией в направлении сгибания для адаптации протеза с присоединительными средствами на верхней стороне и элементом соединения с искусственной стопой, закрепленными на протезе, к ходьбе вверх по лестнице включает: детектирование низкомоментного подъема протеза стопы и уменьшение амортизации сгибания на фазе подъема ниже уровня, подходящего для ходьбы в плоскости. Технический результат - создание управления пассивным протезом коленного сустава, обеспечивающего пациенту чередующийся подъем по лестнице. 16 з.п. ф-лы, 6 ил.
1. Способ управления пассивным протезом коленного сустава с регулируемой амортизацией в направлении сгибания для адаптации протеза с присоединительными средствами на верхней стороне и элементом соединения с искусственной стопой, закрепленными на протезе, к ходьбе вверх по лестнице, включающий: детектирование низкомоментного подъема протеза стопы и уменьшение амортизации сгибания на фазе подъема ниже уровня, подходящего для ходьбы в плоскости.
2. Способ по п.1, отличающийся тем, что амортизацию разгибания и/или сгибания на фазе постановки протеза стопы и распрямления тазобедренного сустава повышают до уровня выше амортизации управления фазой переноса ноги для ходьбы в плоскости.
3. Способ по п.2, отличающийся тем, что амортизацию сгибания на фазе постановки протеза стопы повышают до максимального значения.
4. Способ по п.2 или 3, отличающийся тем, что амортизацию сгибания на фазе постановки протеза стопы и распрямления тазобедренного сустава сохраняют до полного распрямления тазобедренного сустава.
5. Способ по п.2, отличающийся тем, что амортизацию сгибания повышают в зависимости от изменения угла коленного сустава.
6. Способ по п.1, отличающийся тем, что амортизацию сгибания повышают или уменьшают в зависимости от действующего на стержень голени осевого усилия.
7. Способ по п.1, отличающийся тем, что амортизацию разгибания настраивают на фазе подъема и постановки протеза стопы и распрямления тазобедренного сустава.
8. Способ по п.1, отличающийся тем, что детектирование низкомоментного подъема осуществляют посредством датчика усилия или момента.
9. Способ по п.1, отличающийся тем, что детектирование низкомоментного подъема осуществляют посредством измерения горизонтального ускорения протеза стопы и определения сгиба протеза коленного сустава.
10. Способ по п.1, отличающийся тем, что детектирование низкомоментного подъема осуществляют посредством определения момента плюсны в протезе стопы.
11. Способ по п.1, отличающийся тем, что поддержку сгибания на фазе подъема протеза стопы осуществляют посредством натяженного пружинного механизма.
12. Способ по п.1, отличающийся тем, что повышение амортизации сгибания и разгибания начинают после повторной постановки протеза ступни после подъема.
13. Способ по п.12, отличающийся тем, что постановку протеза стопы детектируют посредством изменения осевого усилия в стержне голени или в протезе стопы.
14. Способ по п.1, отличающийся тем, что амортизацию сгибания на фазе подъема протеза стопы уменьшают до минимального значения.
15. Способ по п.1, отличающийся тем, что после уменьшения амортизации сгибания свободное разгибание настраивают с управлением временем.
16. Способ по п.15, отличающийся тем, что свободное разгибание поддерживают с помощью пружины.
17. Способ по п.15 или 16, отличающийся тем, что управление временем осуществляют механическим или электронным путем.
| US 2005015156 A1, 20.01.2005 | |||
| WO 2005087144 A2, 22.09.2006 | |||
| СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ АМОРТИЗАЦИЕЙ ПРОТЕЗНОГО КОЛЕНА В ФАЗЕ СТОЯНИЯ, СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ АМОРТИЗАЦИЕЙ МОМЕНТА ПРОТЕЗНОГО КОЛЕНА В ФАЗЕ ХОДЬБЫ, ПРОТЕЗНОЕ КОЛЕНО, ПРИСПОСАБЛИВАЮЩЕЕСЯ ДЛЯ УПРАВЛЕНИЯ МОМЕНТОМ АМОРТИЗАЦИИ ВО ВРЕМЯ ФАЗЫ СТОЯНИЯ ЧЕЛОВЕКА БЕЗ НОГИ, И ПРОТЕЗНЫЙ УЗЕЛ | 2001 |
|
RU2271779C2 |
| УПРАВЛЯЕМЫЙ ЭЛЕКТРОНИКОЙ ПРОТЕЗНЫЙ КОЛЕННЫЙ СУСТАВ, ПРОТЕЗНЫЙ УЗЕЛ И СПОСОБ УПРАВЛЕНИЯ ВРАЩЕНИЕМ ЭЛЕКТРОННОГО ПРОТЕЗА КОЛЕННОГО СУСТАВА | 2001 |
|
RU2266722C2 |

