Изобретение относится к радиотехнике и может быть использовано в средствах радиомониторинга, радиопеленгаторах, обнаружителях сигналов управления беспилотного летательного аппарата (БпЛА), а также аналогичных средствах и системах, в которых осуществляется обнаружение радиосигналов источников радиоизлучения (ИРИ) в условиях шумов неизвестной интенсивности с определением направления на ИРИ, в том числе, с использованием акустических датчиков.
Наиболее близким по технической сущности и достигаемому техническому результату (прототип) является устройство – адаптивный двухпороговый обнаружитель сигналов ИРИ, размещенных на подвижных носителях [патент РФ № 2822921, H04B1/10, 2024], содержащий основной канал обнаружения, включающий последовательно соединенные аналого-цифровой преобразователь (АЦП), первый и второй квадратурные фазовые детекторы (КФД), косинусно-синусный генератор (КСГ), первый и второй интеграторы, первый и второй квадратичный детектор (КД), сумматор и первое пороговое устройство (ПУ), при этом объединенные первые входы первого и второго КФД соединены с выходом АЦП первый вход которого является входом устройства, вторые входы первого и второго КФД соединены, соответственно, с выходами квадратурных составляющих (синусной и косинусной) опорной частоты КСГ и входом блока формирования частоты дискретизации выход которого соединен со вторым входом АЦП, выходы первого и второго КФД соединены с входами первого и второго интеграторов, соответственно, выходы первого и второго интеграторов соединены, соответственно, с входами первого и второго КД, выходы которых подключены к первому и второму входам сумматора, соответственно, выход которого соединен с объединенными первыми входами блока вычитания и первого ПУ, соответственно, дополнительный канал обнаружения, состоящий из последовательно соединенных третьего КД и третьего интегратора, при этом вход дополнительного канала соединен с объединенными входами первого и второго КФД и выходом АЦП, а выход соединен со вторым входом блока вычитания, выход которого подключен ко второму входу первого ПУ, последовательно соединенные регистр хранения заданных значений вероятности обнаружения сигнала и блока вычисления нижнего уровня порога обнаружения, последовательно соединенные регистр хранения коэффициента достоверности и блока вычисления верхнего уровня порога обнаружения, переключатель, второе ПУ, индикатор и программируемый интерфейс, вход которого подключен к шине управления панорамного радиоприемника; первый и второй выходы программируемого интерфейса подключены к регистру хранения заданных значений вероятности обнаружения сигнала и регистру хранения коэффициента достоверности, соответственно, третий выход программируемого интерфейса соединен с индикатором, первый вход переключателя подключен к выходу первого ПУ, второй и третий входы переключателя соединены, соответственно, с выходами блоков вычисления нижнего и верхнего уровней порога обнаружения, выход переключателя соединен со вторым входом второго ПУ, первый вход которого подключен к выходу третьего интегратора, выход второго ПУ является выходом устройства, последовательно соединенные перемножитель, блок оценки среднего значения циклической автокорреляционной функции, блок оценки изменения циклической автокорреляционной функции, третье ПУ, накопитель, четвертое ПУ выход которого является вторым выходом устройства, при этом первый вход перемножителя соединен с выходом сумматора, а второй вход с выходом второго ПУ и первым выходом устройства, последовательно соединенные регистр хранения значения вероятности ложного принятия решения о нестационарности автокорреляционной функции уровня сигнала, блок вычисления порога принятия решения о нестационарности автокорреляционной функции уровня сигнала выход которого соединен со вторым входом третьего ПУ, а вход регистра хранения значения вероятности ложного принятия решения о нестационарности автокорреляционной функции уровня сигнала с четвертым выходом программируемого интерфейса, последовательно соединенные регистр хранения значения вероятности принятия решения о подвижности источника радиоизлучения, блок вычисления порога принятия решения о подвижности источника радиоизлучения выход которого соединен со вторым входом четвертого ПУ, а вход регистра хранения значения вероятности принятия решения о подвижности источника радиоизлучения соединен с пятым выходом программируемого интерфейса.
Недостатком устройства является отсутствие функциональной возможности определения направления на ИРИ.
Техническим результатом изобретения является расширение функциональных возможностей устройства прототипа за счет реализации акустического канала пеленгования по методу максимума на основе направленного микрофона на опорно-поворотном устройстве (ОПУ) с полосой пропускания канала, соответствующей полосе звуковых частот двигателей БпЛА.
Технический результат достигается тем, что в известное устройство, содержащее основной канал обнаружения, включающий последовательно соединенные АЦП и первый и второй КФД, КСГ, первый и второй интеграторы, первый и второй КД, сумматор и первое ПУ, при этом объединенные первые входы первого и второго КФД соединены с выходом АЦП первый вход которого является входом устройства, вторые входы первого и второго КФД соединены, соответственно, с выходами квадратурных составляющих (синусной и косинусной) опорной частоты КСГ, второй вход первого квадратурного фазового детектора соединен также с входом блока формирования частоты дискретизации выход которого соединен со вторым входом АЦП, выходы первого и второго КФД соединены с входами первого и второго интеграторов, соответственно, выходы первого и второго интеграторов соединены, соответственно, с входами первого и второго КД, выходы которых подключены к первому и второму входам сумматора, соответственно, выход которого соединен с объединенными первыми входами блока вычитания и первого ПУ, соответственно, дополнительный канал обнаружения, состоящий из последовательно соединенных третьего КД и третьего интегратора, при этом вход дополнительного канала соединен с объединенными входами первого и второго КФД и выходом АЦП, а выход соединен со вторым входом блока вычитания, выход которого подключен ко второму входу первого ПУ, последовательно соединенные регистр хранения заданных значений вероятности обнаружения сигнала и блока вычисления нижнего уровня порога обнаружения, последовательно соединенные регистр хранения коэффициента достоверности и блока вычисления верхнего уровня порога обнаружения, переключатель, второе ПУ, индикатор и программируемый интерфейс, вход которого подключен к шине управления панорамного радиоприемника; первый и второй выходы программируемого интерфейса подключены к регистру хранения заданных значений вероятности обнаружения сигнала и регистру хранения коэффициента достоверности, соответственно, третий выход программируемого интерфейса соединен с индикатором, первый вход переключателя подключен к выходу первого ПУ, второй и третий входы переключателя соединены, соответственно, с выходами блоков вычисления нижнего и верхнего уровней порога обнаружения, выход переключателя соединен со вторым входом второго ПУ, первый вход которого подключен к выходу третьего интегратора, выход второго ПУ является выходом устройства; последовательно соединенные перемножитель, блок оценки среднего значения циклической автокорреляционной функции, блок оценки изменения циклической автокорреляционной функции, третье ПУ, накопитель, четвертое ПУ, при этом первый вход перемножителя соединен с выходом сумматора, а второй вход с выходом второго ПУ и выходом устройства, последовательно соединенные регистр хранения значения вероятности ложного принятия решения о нестационарности автокорреляционной функции уровня сигнала, блок вычисления порога принятия решения о нестационарности автокорреляционной функции уровня сигнала выход которого соединен со вторым входом третьего ПУ, а вход регистра хранения значения вероятности ложного принятия решения о нестационарности автокорреляционной функции уровня сигнала с четвертым выходом программируемого интерфейса, последовательно соединенные регистр хранения значения вероятности принятия решения о подвижности ИРИ, блок вычисления порога принятия решения о подвижности ИРИ выход которого соединен со вторым входом четвертого ПУ, а вход регистра хранения значения вероятности принятия решения о подвижности ИРИ соединен с пятым выходом программируемого интерфейса, дополнительно введены последовательно соединенные направленный микрофон, полосовой фильтр (ПФ), усилитель звуковой частоты (УЗЧ), четвертый КД, схема выбора максимума (СВМ), блок управления (БУ), ОПУ, при этом первый вход дополнительно введенного направленного микрофона является вторым входом устройства, а первый выход ОПУ соединен с его вторым входом, БУ своим вторым входом соединен с выходом второго переключателя, третьим входом с вторым выходом ОПУ, а второй выход БУ соединен с входом дополнительно введенного индикатора пеленга, при этом первый и второй входы второго переключателя соединены с выходами соответствующих вновь введенных регистра хранения значения сектора вращения и регистра хранения сигнала «Круг» соответственно, а их входы соединены с соответствующими выходами второго программируемого интерфейса, вход которого подключен к шине управления панорамного радиоприемника, а также к выходу четвертого порогового устройства.
Сущность изобретения заключается в том, что дополнительно введенные последовательно соединенные направленный микрофон, ПФ, УЗЧ, четвертый КД, СВМ, БУ, ОПУ, при этом первый вход дополнительно введенного направленного микрофона является вторым входом устройства, а первый выход ОПУ соединен с его вторым входом, БУ своим вторым входом соединен с выходом второго переключателя, третьим входом с вторым выходом ОПУ, а второй выход БУ соединен с входом дополнительно введенного индикатора пеленга, при этом первый и второй входы второго переключателя соединены с выходами соответствующих вновь введенных регистра хранения значения сектора вращения и регистра хранения сигнала «Круг» соответственно, а их входы соединены с соответствующими выходами второго программируемого интерфейса вход которого подключен к шине управления панорамного радиоприемника, обеспечивают, в случае появления на выходе четвертого ПУ сигнала о перемещении ИРИ относительно обнаружителя, являющегося разрешающим сигналом для начала работы второго программируемого интерфейса, непрерывный прием акустического сигнала с помощью направленного микрофона в полосе звуковых частот двигателей БпЛА, при этом осуществляется с помощью ОПУ вращение направленного микрофона в заданном секторе или по кругу по соответствующей команде с выхода БУ, а СВМ осуществляет непрерывный контроль уровня огибающей акустического сигнала и, при фиксации максимального уровня, с его выхода поступает команда в БУ на прекращение вращения и считывание углового положения направленного микрофона, которое индицируется на дополнительно введенном индикаторе пеленга, чем и достигается технический результат.
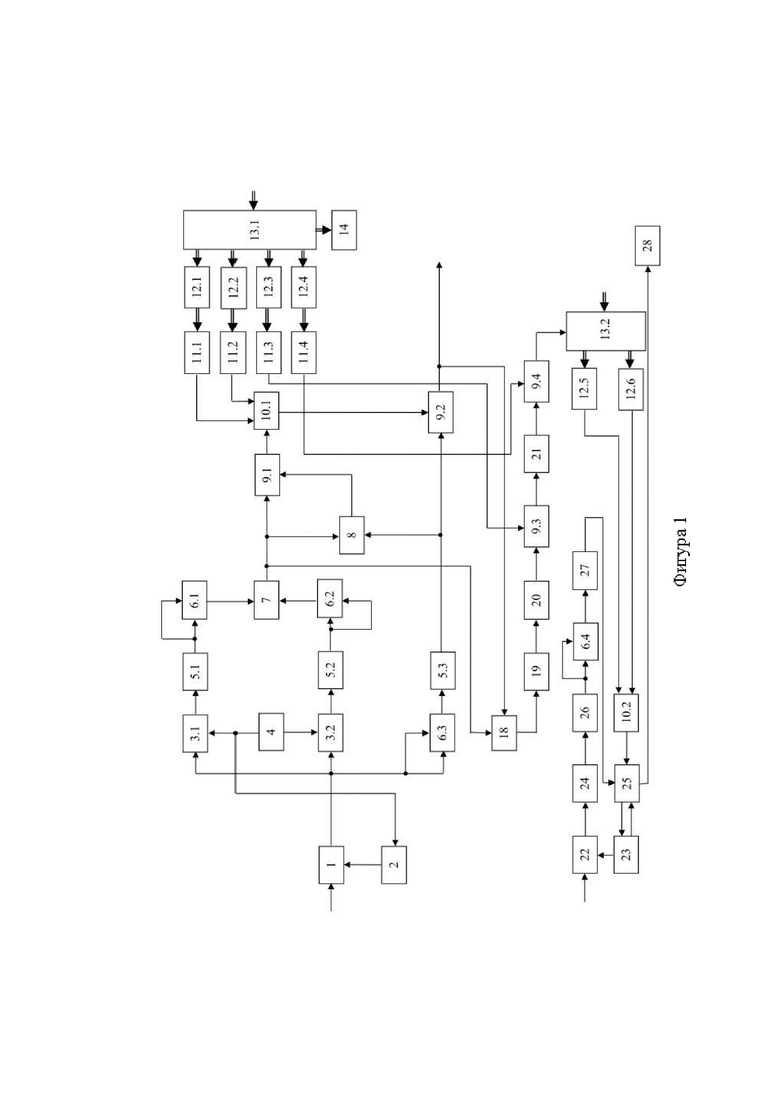
На фигуре 1 представлена функциональная схема обнаружителя сигналов управления БпЛА с акустическим каналом пеленгования, где введены следующие обозначения: 1 – АЦП; 2 – блок формирования частоты дискретизации; 3.1, 3.2 – первый и второй КФД; 4 – КСГ; 5.1, 5.2, 5.3 – первый, второй и третий интеграторы; 6.1, 6.2, 6.3, 6.4 – первый, второй, третий и четвертый КД; 7 – сумматор; 8 – блок вычитания, 9.1, 9.2, 9.3, 9.4 – ПУ; 10.1, 10.2 – первый и второй переключатели; 11.1, 11.2, 11.3, 11.4 – блоки вычисления уровней порогов; 12.1, 12.2, 12.3, 12.4, 12.5, 12.6 – регистры хранения; 13.1, 13.2 – первый и второй программируемые интерфейсы; 14 – индикатор; 18 – перемножитель; 19 – блок оценки среднего значения циклической АКФ; 20 – блок оценки изменения циклической АКФ; 21 – накопитель; 22 – направленный микрофон; 23 – ОПУ; 24 – ПФ; 25 – БУ; 26 – УЗЧ; 27 – СВМ; 28 – индикатор пеленга.
Блок вычитания 8, блока оценки среднего значения циклической АКФ 19 и блока оценки изменения циклической АКФ 20 реализованы аналогично устройству прототипу.
Назначение элементов устройства ясны из их названия и все элементы могут быть выполнены на основе известных промышленно выпускаемых радиотехнических элементов.
Основной и дополнительный каналы приема, пороговые устройства, блоки вычисления уровней порога, регистры хранения, интеграторы, КД, программируемые интерфейсы, СВМ могут быть выполнены на программируемых логических интегральных микросхемах (например, ПЛИС серии FPGA Cyclone III фирмы ALTERA) или цифровых сигнальных процессорах (например, DSP TS101S).
ОПУ и БУ могут быть выполнены на базе типовых поворотных устройств с пультом управления (например, типа G5500).
Обнаружитель сигналов управления БпЛА с акустическим каналом пеленгования содержит основной канал обнаружения, включающий последовательно соединенные АЦП 1 и первый 3.1 и второй 3.2 КФД, КСГ 4, первый 5.1 и второй 5.2 интеграторы, первый 6.1 и второй 6.2 КД, сумматор 7 и первое ПУ 9.1, при этом объединенные первые входы первого 3.1 и второго 3.2 КФД соединены с выходом АЦП 1 первый вход которого является входом устройства, вторые входы первого 3.1 и второго 3.2 КФД соединены, соответственно, с выходами квадратурных составляющих (синусной и косинусной) опорной частоты КСГ 4, второй вход первого 3.1 КФД соединен также с входом блока формирования частоты дискретизации 2 выход которого соединен со вторым входом АЦП 1, выходы первого 3.1 и второго 3.2 КФД соединены с входами первого 5.1 и второго 5.2 интеграторов, соответственно, выходы первого 5.1 и второго 5.2 интеграторов соединены, соответственно, с входами первого 6.1 и второго 6.2 КД, выходы которых подключены к первому и второму входам сумматора 7, соответственно, выход которого соединен с объединенными первыми входами блока вычитания 8 и первого ПУ 9.1, соответственно, дополнительный канал обнаружения, состоящий из последовательно соединенных третьего КД 6.3 и третьего интегратора 5.3, при этом вход дополнительного канала соединен с объединенными входами первого 3.1 и второго 3.2 КФД и выходом АЦП 1, а выход соединен со вторым входом блока вычитания 8, выход которого подключен ко второму входу первого ПУ 9.1, последовательно соединенные регистр хранения заданных значений вероятности обнаружения сигнала 12.1 и блока вычисления нижнего уровня порога обнаружения 11.1, последовательно соединенные регистр хранения коэффициента достоверности 12.2 и блока вычисления верхнего уровня порога обнаружения 11.2, 10.1 первый переключатель, второе ПУ 9.2, индикатор 14 и первый программируемый интерфейс 13.1, вход которого подключен к шине управления панорамного радиоприемника; первый и второй выходы первого программируемого интерфейса 13.1 подключены к регистру хранения заданных значений вероятности обнаружения сигнала 12.1 и регистру хранения коэффициента достоверности 12.2, соответственно, третий выход первого программируемого интерфейса 13.1 соединен с индикатором 14, первый вход первого переключателя 10.1 подключен к выходу первого ПУ 9.1, второй и третий входы первого переключателя 10.1 соединены, соответственно, с выходами блоков вычисления нижнего 11.1 и верхнего 11.2 уровней порога обнаружения, выход первого переключателя 10.1 соединен со вторым входом второго ПУ 9.2, первый вход которого подключен к выходу третьего интегратора 5.3, выход второго ПУ 9.2 является выходом устройства; последовательно соединенные перемножитель 18, блок оценки среднего значения циклической автокорреляционной функции 19, блок оценки изменения циклической автокорреляционной функции 20, третье ПУ 9.3, накопитель 21, четвертое ПУ 9.4, при этом первый вход перемножителя 18 соединен с выходом сумматора 7, а второй вход с выходом второго ПУ 9.2 и выходом устройства, последовательно соединенные регистр хранения значения вероятности ложного принятия решения о нестационарности автокорреляционной функции уровня сигнала 12.3, блок вычисления порога принятия решения о нестационарности автокорреляционной функции уровня сигнала 11.3 выход которого соединен со вторым входом третьего ПУ 9.3, а вход регистра хранения значения вероятности ложного принятия решения о нестационарности автокорреляционной функции уровня сигнала 12.3 с четвертым выходом первого программируемого интерфейса 13.1, последовательно соединенные регистр хранения значения вероятности принятия решения о подвижности ИРИ 12.4, блок вычисления порога принятия решения о подвижности ИРИ 11.4 выход которого соединен со вторым входом четвертого ПУ 9.4, а вход регистра хранения значения вероятности принятия решения о подвижности ИРИ 12.4 соединен с пятым выходом первого программируемого интерфейса 13.1, отличающейся тем, что дополнительно введены последовательно соединенные направленный микрофон 22, ПФ 24, УЗЧ 26, четвертый КД 6.4, СВМ 27, БУ 25, ОПУ 23, при этом первый вход дополнительно введенного направленного микрофона 22 является вторым входом устройства, а первый выход ОПУ 23 соединен с его вторым входом, БУ 25 своим вторым входом соединен с выходом второго переключателя 10.2, третьим входом со вторым выходом ОПУ 23, а второй выход БУ 25 соединен с входом дополнительно введенного индикатора пеленга 28, при этом первый и второй входы второго переключателя 10.2 соединены с выходами соответствующих вновь введенных регистра хранения значения сектора вращения 12.5 и регистра хранения сигнала «Круг» 12.6 соответственно, а их входы соединены с соответствующими выходами второго программируемого интерфейса 13.2 вход которого подключен к шине управления панорамного радиоприемника, а также к выходу четвертого порогового устройства.
Обнаружитель сигналов управления БпЛА с акустическим каналом пеленгования, работает аналогично прототипу, за некоторым исключением.
В случае принятия решения на выходе четвертого ПУ 9.4 о перемещении ИРИ относительно обнаружителя на вход второго программируемого интерфейса 13.2 подается сигнал логической единицы, который инициирует подачу на вход дополнительно введенных регистра хранения значения сектора вращения 12.5 или регистра хранения сигнала «Круг» 12.6 сигнала логической единицы для задания в БУ 25 одного из двух режимов вращения ОПУ 23:
- в случае подачи сигнала логической единицы на вход регистра хранения значения сектора вращения 12.5 с его выхода через первый вход второго переключателя 10.2 на второй вход БУ 25 передаются численные значения границ сектора вращения и БУ 25 соответствующим сигналом с первого выхода включает для ОПУ 23 режим вращения в заданном секторе;
- в случае подачи сигнала логической единицы на вход регистра хранения сигнала «Круг» 12.6 с его выхода через второй вход второго переключателя 10.2 на второй вход БУ 25 передается сигнал «Круг» и БУ 25 соответствующим сигналом с первого выхода включает для ОПУ 23 режим кругового вращения.
Осуществляя вращение на ОПУ 23 на вход направленного микрофон 22 поступают акустические сигналы с различных направлений, а с его выхода электрический сигнал полученный из преобразованного акустического сигнала подается на вход ПФ 24 с полосой пропускания звуковых частот, соответствующей диапазону звуковых частот двигателей БпЛА. После чего, пройдя УЗЧ 26, сигнал детектируется в четвертом КД 6.4 и его огибающая подается на вход СВМ 27 в которой последовательно сравниваются текущая и последующее значения огибающей с целью определения максимального значения в зависимости от угла поворота направленного микрофона 22. В случае определения максимального уровня огибающей сигнала в СВМ 27 на одном из направлений с его выхода на первый вход БУ 25 подается сигнал логической единицы, по которому БУ 25 вырабатывает сигнал останова вращения ОПУ 23 в виде логического нуля, который подается на вход ОПУ 23 и вращение направленного микрофона 22 прекращается. Таким образом, направленный микрофон 22 остается ориентирован в направлении максимума излучения акустического сигнала двигателя БпЛА, а в это время со второго выхода БУ 25 на вход индикатора пеленга 28 подается значения углового положения ОПУ 23 и, тем самым, осуществляется определение направления на перемещающийся ИРИ, чем и достигается заявленный технический результат.
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный двухпороговый обнаружитель сигналов ИРИ, размещенных на подвижных носителях | 2024 |
|
RU2822921C1 |
| Устройство имитации источников радиоизлучения с произвольными видами сигналов | 2024 |
|
RU2826601C1 |
| АДАПТИВНЫЙ ДВУХПОРОГОВЫЙ ОБНАРУЖИТЕЛЬ СИГНАЛОВ ЦИФРОВОГО ПАНОРАМНОГО ПРИЕМНИКА МОДУЛЬНОГО ТИПА | 2013 |
|
RU2524551C1 |
| Устройство распознавания обзорной радиолокационной станции | 2024 |
|
RU2828475C1 |
| Устройство обработки короткоимпульсных сверхширокополосных сигналов на приёмной стороне | 2019 |
|
RU2731369C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И САМОНАВЕДЕНИЯ | 2010 |
|
RU2439608C1 |
| СПОСОБ И УСТРОЙСТВО СЕЛЕКЦИИ СИГНАЛОВ НАДВОДНОЙ ЦЕЛИ В МОНОИМПУЛЬСНОЙ РЛС | 2004 |
|
RU2278397C2 |
| Многоканальный пеленгатор с компенсацией помех | 2024 |
|
RU2829645C1 |
| Устройство синхронизации приёмной и передающей части радиолинии при использовании короткоимпульсных сверхширокополосных сигналов | 2019 |
|
RU2713379C1 |
| Демодулятор сигналов амплитудной манипуляции | 2022 |
|
RU2781271C1 |
Изобретение относится к радиотехнике и может быть использовано в средствах радиомониторинга, радиопеленгаторах, обнаружителях сигналов управления беспилотного летательного аппарата (БпЛА), а также аналогичных средствах и системах, в которых осуществляется обнаружение радиосигналов источников радиоизлучения (ИРИ) в условиях шумов неизвестной интенсивности с определением направления на ИРИ, в том числе с использованием акустических датчиков. Техническим результатом изобретения является расширение функциональных возможностей устройства за счет реализации акустического канала пеленгования по методу максимума на основе направленного микрофона на опорно-поворотном устройстве с полосой пропускания канала, соответствующей полосе звуковых частот двигателей БпЛА. В обнаружителе сигналов управления БпЛА с акустическим каналом пеленгования дополнительно определяется направление на подвижный источник радиоизлучения путем определения направления на источник акустического сигнала в полосе звуковых частот двигателей БпЛА по методу максимума с использованием направленного микрофона. 1 ил.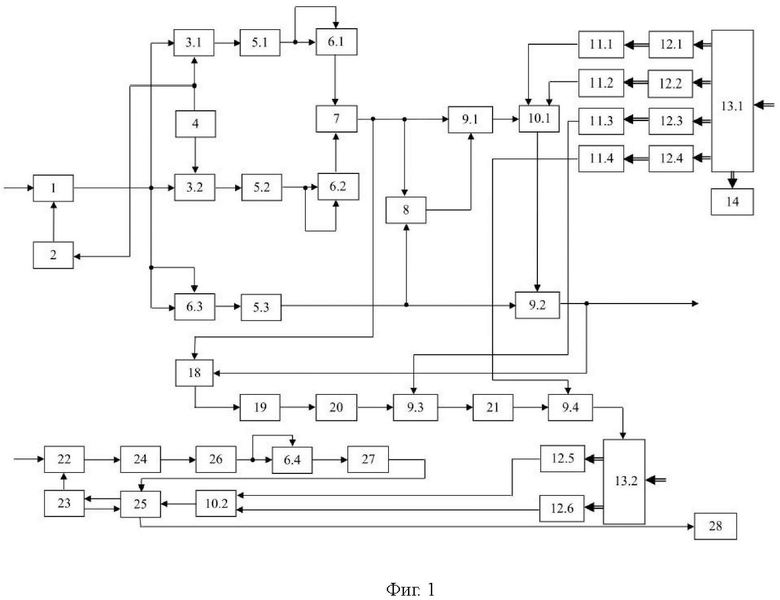
Обнаружитель сигналов управления беспилотного летательного аппарата с акустическим каналом пеленгования, содержащий основной канал обнаружения, включающий последовательно соединенные аналого-цифровой преобразователь и первый и второй квадратурные фазовые детекторы, косинусно-синусный генератор, первый и второй интеграторы, первый и второй квадратичные детекторы, сумматор и первое пороговое устройство, при этом объединенные первые входы первого и второго квадратурных фазовых детекторов соединены с выходом аналого-цифрового преобразователя, первый вход которого является входом устройства, вторые входы первого и второго квадратурных фазовых детекторов соединены, соответственно, с выходами квадратурных составляющих (синусной и косинусной) опорной частоты косинусно-синусного генератора, второй вход первого квадратурного фазового детектора соединен также с входом блока формирования частоты дискретизации, выход которого соединен со вторым входом аналого-цифрового преобразователя, выходы первого и второго квадратурных фазовых детекторов соединены с входами первого и второго интеграторов, соответственно, выходы первого и второго интеграторов соединены, соответственно, с входами первого и второго квадратичных детекторов, выходы которых подключены к первому и второму входам сумматора, соответственно, выход которого соединен с объединенными первыми входами блока вычитания и первого порогового устройства, соответственно, дополнительный канал обнаружения, состоящий из последовательно соединенных третьего квадратичного детектора и третьего интегратора, при этом вход дополнительного канала соединен с объединенными входами первого и второго квадратурных фазовых детекторов и выходом аналого-цифрового преобразователя, а выход соединен со вторым входом блока вычитания, выход которого подключен ко второму входу первого порогового устройства, последовательно соединенные регистр хранения заданных значений вероятности обнаружения сигнала и блок вычисления нижнего уровня порога обнаружения, последовательно соединенные регистр хранения коэффициента достоверности и блок вычисления верхнего уровня порога обнаружения, первый переключатель, второе пороговое устройство, индикатор и первый программируемый интерфейс, вход которого подключен к шине управления панорамного радиоприемника, первый и второй выходы первого программируемого интерфейса подключены к регистру хранения заданных значений вероятности обнаружения сигнала и регистру хранения коэффициента достоверности, соответственно, третий выход первого программируемого интерфейса соединен с индикатором, первый вход первого переключателя подключен к выходу первого порогового устройства, второй и третий входы первого переключателя соединены, соответственно, с выходами блоков вычисления нижнего и верхнего уровней порога обнаружения, выход первого переключателя соединен со вторым входом второго порогового устройства, первый вход которого подключен к выходу третьего интегратора, выход второго порогового устройства является выходом устройства, последовательно соединенные перемножитель, блок оценки среднего значения циклической автокорреляционной функции, блок оценки изменения циклической автокорреляционной функции, третье пороговое устройство, накопитель, четвертое пороговое устройство, при этом первый вход перемножителя соединен с выходом сумматора, а второй вход с выходом второго порогового устройства и выходом устройства, последовательно соединенные регистр хранения значения вероятности ложного принятия решения о нестационарности автокорреляционной функции уровня сигнала, блок вычисления порога принятия решения о нестационарности автокорреляционной функции уровня сигнала, выход которого соединен со вторым входом третьего порогового устройства, а вход регистра хранения значения вероятности ложного принятия решения о нестационарности автокорреляционной функции уровня сигнала с четвертым выходом первого программируемого интерфейса, последовательно соединенные регистр хранения значения вероятности принятия решения о подвижности источника радиоизлучения, блок вычисления порога принятия решения о подвижности источника радиоизлучения, выход которого соединен со вторым входом четвертого порогового устройства, а вход регистра хранения значения вероятности принятия решения о подвижности источника радиоизлучения соединен с пятым выходом первого программируемого интерфейса, отличающийся тем, что дополнительно введены последовательно соединенные направленный микрофон, полосовой фильтр, усилитель звуковой частоты, четвертый квадратичный детектор, схема выбора максимума, блок управления, опорно-поворотное устройство, при этом первый вход дополнительно введенного направленного микрофона является вторым входом устройства, а первый выход опорно-поворотного устройства соединен с его вторым входом, блок управления своим вторым входом соединен с выходом второго переключателя, третьим входом со вторым выходом опорно-поворотного устройства, а второй выход блока управления соединен с входом дополнительно введенного индикатора пеленга, при этом первый и второй входы второго переключателя соединены с выходами соответствующих вновь введенных регистра хранения значения сектора вращения и регистра хранения сигнала «Круг» соответственно, а их входы соединены с соответствующими выходами второго программируемого интерфейса, вход которого подключен к шине управления панорамного радиоприемника, а также к выходу четвертого порогового устройства.
| АДАПТИВНЫЙ ДВУХПОРОГОВЫЙ ОБНАРУЖИТЕЛЬ СИГНАЛОВ ЦИФРОВОГО ПАНОРАМНОГО ПРИЕМНИКА МОДУЛЬНОГО ТИПА | 2013 |
|
RU2524551C1 |
| ОЦЕНОЧНО-КОРРЕЛЯЦИОННЫЙ КОМПЕНСАЦИОННЫЙ ОБНАРУЖИТЕЛЬ СИГНАЛА | 2013 |
|
RU2537849C1 |
| СПОСОБ И УСТРОЙСТВО АКУСТИЧЕСКОГО ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2589290C1 |
| US 10281570 B2, 07.05.2019 | |||
| CN 118444260 A, 06.08.2024 | |||
| WO 2020226240 A1, 12.11.2020. | |||

