Настоящее изобретение относится к датчику с электростатическим маятниковым акселерометром и к способу управления таким датчиком. Датчиком является, например, датчик типа MEMS (от английского Micro Electro-Mechanical Systems).
Электростатический маятниковый акселерометр содержит корпус, с которым соединена сейсмическая масса, связанная с корпусом при помощи одного или нескольких шарниров, установленных таким образом, что сейсмическая масса образует маятник, подвижный относительно корпуса либо в поступательном движении, либо во вращательном движении. Перемещения сейсмической массы под действием ускорения обычно обнаруживают при помощи трех электродов. Первый неподвижный электрод и второй неподвижный электрод неподвижно соединены с корпусом и связаны со схемой возбуждения. Третий, подвижный электрод установлен на маятнике и связан с детекторной схемой.
Каждый неподвижный электрод образует с подвижным электродом емкость, значение которой зависит от разделяющего их расстояния. В отсутствие фабричных дефектов и если датчик не подвергается ускорению вдоль своей чувствительной оси, маятник остается в нейтральном положении, в котором обе емкости являются одинаковыми. Если же маятник подвергается ускорению вдоль своей чувствительной оси, он перемещается, что приводит к уменьшению емкости, образованной подвижным электродом и одним из неподвижных электродов, и к увеличению емкости, образованной подвижным электродом и другим из неподвижных электродов. Это изменение емкостей зависит также от деформаций корпуса и маятника.
При работе в режиме открытого контура ускорение, действующее вдоль чувствительной оси датчика, определяют на основании разности между значениями двух емкостей. Однако этот режим работы имеет ряд недостатков:
- направление чувствительной оси датчика меняется в зависимости от положения маятника, когда он совершает поворотные перемещения;
- существует смещение (или сдвиг) по причине фабричных дефектов асимметрии емкостей (разные площади электродов и/или разные разоры между электродами);
- существует нелинейность измерений по причине нелинейности емкостей в зависимости от перемещения электродов;
- во время движений маятника окружающий его газ сжимается в зависимости от перемещения электродов;
- полоса пропускания ограничена собственной частотой маятника.
При работе в режиме замкнутого контура положение маятника автоматически удерживается в нейтральном положении или в заданном положении на половине расстояния между неподвижными электродами за счет приложения к маятнику электростатической силы. Следовательно, электростатическая сила должна компенсировать ускорение, действующее вдоль чувствительной оси, что позволяет оценить это ускорение. Электростатическая сила является результатом напряжений, прикладываемых к электродам для поддержания на нуле разности емкостей.
Датчик содержит схему возбуждения для каждого неподвижного электрода, выполненную с возможностью подачи питания на электроды с целью создания указанной электростатической силы.
Четырехмерный характер электростатической силы по отношению к прикладываемым напряжениям усложняет выполнение схемы управления, обеспечивающей автоматическое регулирование маятника и оценку ускорения. Для преодоления этой трудности, как известно, маятником управляют по принципу «все или ничего» при помощи калиброванных импульсов напряжений. Эти импульсы прикладывают к одному или другому из электродов в зависимости от того, идет ли речь об отталкивании маятника или его притягивании для его приведения в заданное положение. Плотность импульсов, необходимых, чтобы отталкивать (или притягивать) маятник, то есть количество импульсов на промежуток времени, является в этом случае аффинной функцией измеряемого ускорения. Таким образом, нулевое ускорение будет компенсироваться в среднем одинаковым числом импульсов в обоих направлениях.
Однако, если симметрия импульсов, подаваемых на два электрода, является не идеальной (в основном по причине разности между продолжительностью каждого импульса, прикладываемого к первому неподвижному электроду, и продолжительностью каждого импульса, прикладываемого ко второму неподвижному электроду), плотность импульсов изменяют посредством автоматического регулирования, чтобы удерживать маятник в заданном положении, что приводит к искажению результата оценки ускорения. Если в качестве примера взять акселерометр, в котором каждое из напряжений, прикладываемых во время фазы управления, создает среднюю силу за период Ts=1 мкс, эквивалентную ускорению маятника равному 50 g, то, чтобы поддерживать погрешность такого акселерометра в значении менее 50 μg, необходимо контролировать симметрию импульсов с точностью, меньшей отношения 50 μg/50 g, то есть 1.10-6. Поэтому продолжительность импульсов необходимо контролировать таким образом, чтобы асимметрия не превышала 1.10-6×1 мкс, то есть 1 пс, что является исключительно сложной задачей.
Асимметрия реализации, которая является слабым местом управления по принципу «все или ничего», является, таким образом, главным препятствием для повышения эффективности этих датчиков.
Задачей изобретения является создание средства, позволяющего улучшить характеристики таких датчиков.
Для этого изобретением предложен акселерометрический датчик, содержащий по меньшей мере один электростатический маятниковый акселерометр, имеющий первый и второй неподвижные электроды, закрепленные на корпусе и соединенные со схемой возбуждения, и третий электрод, установленный на маятнике, соединенном с корпусом, с возможностью перемещения и связанный с детекторной схемой. Схема возбуждения имеет выход, соединенный с переключателем, связанным с первым и вторым электродами, при этом переключатель имеет первое положение соединения и второе положение соединения, чтобы селективно соединять со схемой возбуждения первый электрод и второй электрод, при этом схема возбуждения, переключатель и детекторная схема соединены со схемой управления, выполненной таким образом, что первый и второй электроды возбуждаются импульсами таким образом, чтобы удерживать маятник в заданном положении и определять ускорение, действующее на маятник.
Таким образом, импульсы поступают на каждый электрод от одной и той же схемы возбуждения, что позволяет ограничить проблемы, связанные с асимметрией по причине дефектов изготовления и старения электроники схемы возбуждения.
Объектом изобретения является также способ управления датчиком, содержащим по меньшей мере один электростатический маятниковый акселерометр, имеющий первый и второй неподвижные электроды, закрепленные на корпусе и соединенные со схемой возбуждения, и третий электрод, установленный на маятнике, соединенном с корпусом, с возможностью перемещения и связанный с детекторной схемой. Способ управления содержит следующие этапы:
- поочередно возбуждают один или другой из неподвижных электродов при помощи детекторных импульсов для определения первой емкости и второй емкости между подвижным электродом и неподвижными электродами,
- оценивают положение маятника на основании определенных емкостей,
- определяют погрешность регулирования, соответствующую разности между оценочным положением и заданным положением,
- на основании погрешности регулирования определяют команду, определяющую, будет ли следующий импульс отталкивать или притягивать маятник,
- измеряемое ускорение вычисляют в зависимости от заданного положения и от определенной команды,
- во время фазы управления возбуждают один или другой из неподвижных электродов при помощи управляющих импульсов, чтобы привести к нулю погрешность регулирования.
Другие признаки и преимущества изобретения будут более очевидны из нижеследующего описания частных не ограничительных вариантов выполнения изобретения со ссылками на прилагаемые чертежи, на которых:
фиг. 1 - схематичный вид датчика согласно первому варианту выполнения изобретения;
фиг. 2 - частичный схематичный вид датчика согласно второму варианту выполнения изобретения;
фиг. 3 - вид, аналогичный фиг. 2, датчика согласно третьему варианту выполнения изобретения;
фиг. 4 - хронограмма, иллюстрирующая управление датчиком.
Как показано на фигурах, акселерометрический датчик в соответствии с изобретением содержит электростатический маятниковый акселерометр, обозначенный общей позицией 1. Акселерометр 1 содержит корпус 2, с которым соединена сейсмическая масса 3, связанная с корпусом 2 при помощи шарнира 4, расположенного таким образом, чтобы сейсмическая масса 3 образовала маятник, подвижный в поворотном движении относительно корпуса 2.
Акселерометр 1 содержит первый неподвижный электрод 5.1 и второй неподвижный электрод 5.2, которые неподвижно соединены с корпусом 2 и связаны со схемой возбуждения, обозначенной общей позицией 6, и третий электрод 5.3, образующий сейсмическую массу 3 и связанный с детекторной схемой, обозначенной общей позицией 7. Схема управления, обозначенная общей позицией 8, соединена со схемой 6 возбуждения и с детекторной схемой 7 с целью управления этими схемами.
Схема 6 возбуждения имеет выход, соединенный с переключателем 9, соединенным с первым электродом 5.1 и со вторым электродом 5.2. Переключатель 9 имеет первое положение соединения и второе положение соединения, чтобы селективно соединять со схемой 6 возбуждения первый электрод 5.1 и второй электрод 5.2. В частности, переключатель 9 содержит ключ I1, выполненный с возможностью соединения первого электрода 5.1 либо с выходом схемы 6 возбуждения (первое положение соединения), либо с массой (второе положение соединения), и ключ I2, выполненный с возможностью соединения второго электрода 5.2 либо с выходом схемы 6 возбуждения (второе положение соединения), либо с массой (первое положение соединения). Переключатель 9 соединен с управляющей им схемой 8 управления.
Схема 8 управления содержит первое оценочное устройство 10, имеющее вход, соединенный с детекторной схемой 7, и выход, соединенный с отрицательным входом сумматора 11, выход которого соединен с входом корректора 12, выход которого соединен с планировщиком 13. Схема 8 управления содержит также второе оценочное устройство 14, имеющее вход, соединенный с выходом корректора 12, выход, соединенный с суммирующим входом сумматора 11, и выход, выдающий оценочное значение ускорения γе.
В первом варианте выполнения, представленном на фиг. 1, схема 6 возбуждения содержит цифроаналоговый преобразователь 15, соединенный с переключателем 9 и управляемый схемой 8 управления.
Детекторная схема 7 содержит главный усилительный каскад 16, содержащий зарядовый усилитель 17, оснащенный конденсатором 18 замыкания емкости Cref и ключом I3. Усилительный каскад имеет вход, соединенный с третьим электродом 5.3, и выход, соединенный с входом аналого-цифрового преобразователя 19, выход которого соединен с первым оценочным устройством 10 блока 8 управления.
Далее следует описание работы датчика.
Блок 8 управления управляет работой датчика и, в частности, хронологией различных операций, выборочно осуществляемых на частоте Fs (по периодам Ts=1/Fs, см. фиг. 4). Планировщик 13 распределяет последовательность операций внутри периода выборки Ts и от одного периода выборки (n)Ts к другому (n+1)Ts. Планировщик 13 блока 8 управления последовательно и циклично управляет цифроаналоговым преобразователем 15 при помощи команды u, аналоговыми ключами I1, I2 при помощи команды s, а также аналого-цифровым преобразователем 19 при помощи команды с, и аналоговым ключом I3 при помощи команды r.
В соответствии с логическим состоянием команды s один из электродов 5.1, 5.2 соединяют с выходом v цифроаналогового преобразователя 15, тогда как другой электрод 5.2, 5.1 в это же время соединяют с массой. Следует отметить, что планировщик 13 выполнен с возможностью управления этим переключением, когда выход v находится на нуле, чтобы избегать переходных помех во время переключения.
Напряжения vh и vb, подаваемые соответственно на электроды 5.1, 5.2, последовательно распределяют таким образом, чтобы измерять емкости Ch (емкость, образованная между электродами 5.1 и 5.3) и Cb (емкость, образованная между электродами 5.2 и 5.3), с целью приложения электростатической силы, позволяющей автоматически устанавливать маятник в его положение, заданное блоком управления. Предположив, что первоначальная скорость маятника равна нулю, продолжительность Ti каждого импульса, подаваемого на каждый из электродов 5.1, 5.2, выбирают достаточной короткой, чтобы перемещение z, вызванное указанным импульсом в конце времени Ts, оставалось незначительным по сравнению с зазором е, существующим между указанным неподвижным электродом 5.1, 5.2 и подвижным электродом 5.3.
Ключ I3, который замыкает зарядовый усилитель 17, управляется сигналом r, поступающим от планировщика 13, и за счет ответной реакции приводит к удержанию потенциала v0 на электроде 5.3 в значении фиксированного потенциала, например, в значении ноль, как на схеме, при помощи зарядового усилителя 17.
Аналого-цифровой преобразователь 19, управляемый командой s, преобразует выходное напряжение vd зарядового усилителя 17 в цифровую величину y.
Оценочное устройство 10 выдает оценочное значение ze перемещения маятника на основании величины y.
Оценочное устройство 14 выдает на суммирующий вход сумматора 11 возмущение zm, определяемое известным образом, чтобы возбуждать и оценивать некоторые термы погрешностей с целью компенсации их влияния, что будет показано ниже.
Сумматор определяет разность zm-ze, которую передает в корректор 12, вырабатывающий команду bs равную +1 или -1 в зависимости от того, необходимо оттолкнуть или притянуть маятник для приведения на ноль входа корректора 12. Таким образом, корректор 12 обеспечивает автоматическое приведение к нулю разности zm-ze.
Кроме того, оценочное устройство 14 определяет оценочное значение γe измеряемого ускорения.
В рамках заявленного способа каждый период выборки Ts содержит три основные фазы, а именно:
- первую фазу обнаружения D1, во время которой обнаруживают напряжение Vd для пары электродов 5.1 и 5.3 и преобразуют его в величину y1;
- вторую фазу обнаружения D2, во время которой обнаруживают напряжение Vd для пары электродов 5.2 и 5.3 и преобразуют его в величину y2;
- фазу управления С, во время которой подают сигнал возбуждения либо на неподвижный электрод 5.1 (в данном случае n.Ts), либо на неподвижный электрод 5.2 (в данном случае (n+1)⋅Ts) в зависимости от того, необходимо притянуть сейсмическую массу либо к неподвижному электроду 5.1, либо к неподвижному электроду 5.2 для ее приведения в заданное положение.
По истечении двух фаз обнаружения корректор 12 определяет знак команды bs, определяющий, что командный сигнал u необходимо подать на неподвижный электрод 5.1 или на неподвижный электрод 5.2.
Три фазы D1, D2 и С разделены фазой релаксации, во время которой переустанавливают ключи I1, I2, I3, пока напряжение преобразователей находится на нуле.
Далее следует более подробное описание фаз обнаружения и фазы управления.
Во время фазы обнаружения D1, предназначенной для измерения Ch, логическая команда s установлена на 1, чтобы соединить неподвижный электрод 5.1 при помощи ключа I1 с выходом v цифроаналогового преобразователя 15 и соединить неподвижный электрод 5.2 с массой при помощи ключа I2.
Емкость замыкания зарядового усилителя предварительно замыкают накоротко при помощи ключа I3 (r=1, повторная инициализация зарядового усилителя), тогда как выход цифроаналогового преобразователя 15 находится на нуле.
После того как r возвратится на ноль, при помощи действия цифроаналогового преобразователя 15 потенциал vh приводят к постоянному значению Vref, что приводит к переходу количества заряда Ch, Vref в емкость Cref.
Когда выход зарядового усилителя 17 стабилизируется, производят первое аналого-цифровое преобразование vd. Если Qos является количеством вводимого заряда во время его размыкания при помощи аналогового ключа I3, связанного с емкостью Cref, vos является приведенным смещением на входе цифроаналогового преобразователя 15, и Gcan является коэффициентом усиления аналого-цифрового преобразователя 19, то выход аналого-цифрового преобразователя 19 в конце фазы D1 равен
Фаза D2, предназначенная для измерения Cb, идентична фазе D1, только в этом случае роли электродов 5.1 и 5.2 поменялись, так как s находится теперь на 0, а не на 1. В результате этого второе значение, кодируемое аналого-цифровым преобразователем 19 в конце фазы D2, равно

Именно благодаря применению единственного цифроаналогового преобразователя 15, связанного с выключателями I1 и I2, значение Vref является идентичным в выражениях y1 и y2.
Операция, осуществляемая оценочным устройством 10, состоит в вычислении разности между y1 и y2, затем в умножении результата на коэффициент усиления Gcomp

Погрешности электронного происхождения устраняются, кроме того, применение единственного аналого-цифрового преобразователя 19 позволяет придать одинаковый вес измерениям Ch, и Cb, и устранить другой источник погрешностей.
Следует отметить, что при замене емкостей их выражениями в зависимости от z в вышеуказанном выражении Ze было установлено, что асимметрия электродов является причиной погрешности оценки z0

Что касается фазы управления, разность zm-ze автоматически устанавливают на ноль при помощи корректора 12, который вырабатывает команду bs равную +1 или -1 в зависимости от того, следует ли оттолкнуть или притянуть маятник, откуда вытекает, что s=(bs+1)/2.
Если bs=+1, s устанавливают на 1, чтобы переключатель 9 соединил выход цифроаналогового преобразователя 15 с неподвижным электродом 5.1 и неподвижный электрод 5.2 с массой. При этом напряжение цифроаналогового преобразователя 15 переходит от нуля к не равному нулю значению, затем возвращается на ноль перед фазой релаксации. Электростатическая сила, которая является притягивающей, притягивает в этом случае маятник к неподвижному электроду 5.1.
Если bs=-1, s устанавливают на 0, чтобы переключатель 9 соединил выход цифроаналогового преобразователя 15 с неподвижным электродом 5.2 и неподвижный электрод 5.1 с массой. При этом напряжение цифроаналогового преобразователя 15 переходит от нуля к не равному нулю значению, затем возвращается на ноль перед фазой релаксации, описывая временную траекторию, идентичную траектории, описываемой в случае, когда bs=+1. В этом случае электростатическая сила притягивает маятник к неподвижному электроду 5.2.
Следует отметить, что, аналогично обнаружению, применение единственного цифроаналогового преобразователя 15 тоже гарантирует равенство напряжений, подаваемых на электроды 5.1, 5.2. Это является особенно важным в фазе управления, так как прикладываемая к маятнику электростатическая сила равна разности электростатических сил, прикладываемых к электродам 5.1, 5.2. Однако, поскольку эти силы пропорциональны квадрату прикладываемых напряжений, необходимо контролировать симметрию квадратов указанных напряжений и, в отличие от случая обнаружения, эту симметрию необходимо получать не только в моменты выборки, но также в среднем за период выборки. Единственный и мультиплексированный цифроаналоговый преобразователь 15 позволяет подавать напряжения с идентичными профилями на электроды 5.1, 5.2, независимо от фабричных дефектов электроники. Моменты переключения выключателей не являются критическими, поскольку их переключают, когда выходное напряжение цифроаналогового преобразователя 15 является нулевым.
Формы волны, выдаваемые цифроаналоговым преобразователем 15 во время двух фаз обнаружения и фазы управления, характеризуются их соответственными среднеквадратичными величинами (или значениями RMS) σd и σc, определяемыми за период Ts


при Σ=Vh2+Vb2 и Δ=Vh2-Vb2.
Величины Σ и Δ характеризуют соответственно действие симметричных сил и действие асимметричных сил на маятник. Величины Σ и Δ считаются не зависящими от положения z, то есть электроды управляются по напряжению, а не по заряду.
При этом уравнение усредненного изменения за период выборки становится следующим (уравнение I):

(перевод надписей в формуле: Electrostatic acceleration - электростатическое ускорение, With - при)
где ke - электростатическая жесткость,
k: механическая жесткость,
zc: механическое смещение,
z0: механическое смещение.
Таким образом, по отношению к bs выражение электростатической силы является линейным, кроме того, электростатическая жесткость становится постоянной, поэтому оценочное ускорение вычисляют как аффинную функцию bs.
Вышеуказанная формула предполагает, что вторая производная zm является достаточно близкой к нулю, поэтому ею можно пренебречь, что соответствует соблюдению следующего условия:
На практике это равнозначно ограничению спектра zm частотной полосой, находящейся намного ниже первой собственной частоты чувствительного элемента.
Чтобы оценить погрешности, связанные с различными дефектами, и определить средства для их устранения, вводятся понятия максимального ускорения и ускорения прихода в положение упора.
Если датчик и его применение не имеют дефектов, максимальное ускорение γmax, которое можно компенсировать, получают, заменяя bs на 1 в уравнении I, то есть

Электрическую проницаемость зазора между электродами, плотность, активную площадь и толщину чувствительного элемента обозначают соответственно ε, ρ, S и h. После выбора материала отмечают, что γmax зависит только от толщины маятника и от среднеквадратичного значения электрического поля σc/e

Кроме того, ускорение γ0, которое могло бы привести идеальный маятник в положение упора в отсутствие электростатической силы, равно
Путем замещения в формуле I выделяют погрешности γ1, γ2 и γ3

Погрешности γ1, γ2 и γ3 зависят соответственно от электрического сдвига при обнаружении, от механических напряжений, действующих на шарнир, и от асимметрии электростатической силы. Что касается y1, то доля, пропорциональная bs.γmax, является погрешностью масштаба шкалы. Однако этой погрешностью в целом можно пренебречь, так как она обычно равна

В случае, когда zm равно нулю, составляющую погрешности, связанную с обнаружением, получают путем замены z0 на его значение

Как правило, масштаб шкалы γmax и погрешность γb заранее идентифицируют на заводе на этапе калибровки, осуществляемом в температурном диапазоне, соответствующем диапазону использования акселерометра. Если обозначить диакритическим знаком параметры калибровки, которые отличаются от реальных параметров по причине погрешностей моделирования и старения, то оценочное ускорение, обозначаемое γе, вычисляют по формуле

Зная выражение bs в зависимости от γ, вводят относительную погрешность масштаба шкалы εmax

Чтобы исключить погрешность, связанную с γ1, можно компенсировать электрическую жесткость при помощи механической жесткости таким образом, чтобы их разность была равна нулю, что позволяет обнулить чувствительность погрешности до z0

Однако, учитывая разбросы заводских допусков датчика и электроники, разность значений жесткости обнуляется не идеально, что снижает эффективность операции. Кроме того, если даже разность жесткостей идеально уничтожается при данной рабочей температуре, все может быть иначе при других рабочих температурах, так как термическая чувствительность датчика и его электроники различаются.
Заявленный способ позволяет автоматически приводить разность механической жесткости и электростатической жесткости к нулю, что позволяет устранить влияние погрешности при обнаружении.
Для этого zm модулируют при помощи схемы управления по заранее определенному, но обязательно цикличному временному профилю.
Поскольку реакция γе на эту помеху, обозначаемая Δγе, пропорциональна разности значений жесткости, то, следовательно, достаточно устранить эту реакцию путем коррекции ke, то есть γ. В зависимости от того, является помеха периодической или нет, реакцию γe на zm можно оценить посредством синхронной демодуляции и фильтрации, при помощи метода наименьших квадратов или при помощи фильтра Кальмана

Коррекцию γ (см. уравнение I) получают, регулируя σd, что оставляет неизменным εmax. Коррекцию σd можно получить, воздействуя на форму или на продолжительность напряжения v во время фаз обнаружения. Второе решение является предпочтительным, так как оно оставляет неизменным коэффициент усиления при обнаружении.
Поскольку реакция γe на zm устраняется путем обнуления разности значений жесткости ke-k, реакция γе на z0 тоже устраняется, и этот источник погрешности исчезает.
Однако уравновешивание значений жесткости характеризуется принципиальным ограничением. Действительно, поскольку выбор максимального ускорения, как правило, является заданным, условие уравновешивания в этом случае приводит к выбору

Это значит, что электрическая жесткость, которая пропорциональна γmax, обуславливает механическую жесткость, которая, в свою очередь, пропорциональна подлежащему компенсации максимальному ускорению. Это решение особенно подходит для датчиков с достаточно большими рабочими зазорами для уменьшения влияния деформаций, воздействующих на zc. Кроме того, это решение является предпочтительным, когда его применяют для датчика, имеющего электроды с переменной площадью, электростатическая жесткость которых близка к нулю.
Выбор использования слабой механической жесткости для уменьшения связанной с ней погрешности, как правило, заставляет отказаться от подбора пар значений жесткости. В этом случае модуляцию, первоначально применявшуюся к zm, не применяют, но zm корректируют, чтобы компенсировать z0 таким образом, что
Этот результат получают путем модуляции ke или, точнее, λ по известному, но не обязательно воспроизводимому временному профилю.
Поскольку реакция γе на эту помеху по существу пропорциональна значению zm-z0, то в принципе достаточно устранить эту реакцию посредством коррекции zm. В зависимости от того, является помеха периодической или нет, реакцию γe на ke можно оценить при помощи синхронной демодуляции и фильтрации, при помощи метода наименьших квадратов или при помощи фильтрации Кальмана

Как показывает это отношение, вместо обнуления, величину zm-z0 корректируют в зависимости от ε1.
Модуляцию λ осуществляют, регулируя σd, что оставляет неизменным εmax. Коррекцию σd можно осуществить, воздействуя на форму или продолжительность напряжения v во время фаз обнаружения. Второе решение является предпочтительным, так как оно оставляет неизменным коэффициент усиления при обнаружении.
Следует отметить, что автоматическое регулирование смещения не вполне подходит для датчиков, имеющих электроды с переменной площадью, так как обычно большое отношение С1/С2 отрицательно сказывается на смещении.
Во втором варианте выполнения, представленном на фиг. 2 и 3, схема 6 возбуждения не имеет цифроаналогового преобразователя 15 и содержит вместо него генератор 30 напряжения, соединенный через выключатель 31 с входом усилительного каскада, содержащего входной резистор 32, соединенный с усилителем 33, замыкаемым через фильтрующий конденсатор 34 и резистор 35.
Это позволяет снизить стоимость и рассеиваемую мощность схемы возбуждения за счет исключения цифроаналогового преобразователя.
Команда u, имеющая значение 0 или 1, управляет селективным переключателем 31. Он соединяет резистор 32 либо с генератором 30 контрольного постоянного напряжения Ref, либо с массой. Напряжение, подаваемое на резистор 32, усиливается при соотношении значений сопротивления резисторов 32, 35 (то есть -R2/R1) и фильтруется с временной константой R2C (где С является емкостью конденсатора 34), которая предупреждает переходное насыщение зарядового усилителя 33, связанное с превышением скорости маятникового поворота (называемой slew-rate). Однако эту временную константу следует выбирать достаточно малой относительно Ts, чтобы выходное напряжение зарядового усилителя 33 возвращалось к значению, близкому к нулю, во время переключений с I1 на I2.
Чтобы уменьшить влияние квантования аналого-цифрового преобразователя на шум оценки ускорения, можно использовать контур, показанный на фиг. 3.
Главный усилительный каскад 16 контура 7 обнаружения соединен с аналого-цифровым преобразователем 19 через компенсирующий каскад, обозначенный общей позицией 40, содержащий первый резистор 41 и второй резистор 42, соединенные последовательно между выходом главного усилительного каскада 16 и входом аналого-цифрового преобразователя 19. Компенсирующий каскад 40 содержит дополнительный усилитель 43 и ключ 44, установленные соответственно параллельно со вторым резистором 42, и цифроаналоговый преобразователь 45, соединенный через третий резистор 46 со вторым резистором 42, с дополнительным усилителем 43 и с ключом 44. Ключом 44 и цифроаналоговым преобразователем 45 управляет схема 8 управления.
Это позволяет уменьшить низкочастотный шум, связанный с квантованием аналого-цифрового преобразователя 19.
Коэффициент усиления R2/R1, который выполняет роль увеличителя масштаба в компенсирующем каскаде, зафиксирован в значении, намного превышающем единицу. Размыкание ключа 44 происходит во время фаз D1 и D2, когда выход зарядового усилителя стабилизируется. Цифроаналоговым преобразователем 45 управляет схема 8 управления таким образом, чтобы поддерживать сумму y1+y2 близкой к нулю, при этом можно использовать динамику цифроаналогового преобразователя, чтобы кодировать только изменения емкостей, усиленных при помощи соотношения R2/R1.
Цифроаналоговый преобразователь 45 компенсирует влияние действия:
- неподвижной части емкостей,
- смещения vos,
- подачи заряда Qos.
Это влияние меняется медленно, что позволяет использовать медленный цифроаналоговый преобразователь 45 с незначительным шумом, чтобы одновременно снизить стоимость и рассеиваемую мощность.
Вблизи частоты отсечки петли «сигма-дельта» переходная функция в режиме открытой петли должна стремиться к переходной функции интегратора, чтобы обеспечивать хорошее демпфирование. Однако поскольку поведение маятника на высокой частоте подвержено влиянию сил инерции, переходную функцию z/bs можно уподобить переходной функции двойного интегратора. Следовательно, переходная функция корректора должна стремиться к переходной функции дифференциатора.
В случае использования увеличителя масштаба электрическое насыщение обнаружения предшествует механическому насыщению, связанному с приходом маятника в положение упора. При достижении электрического насыщения функция дифференциатора, обычно выполняемая корректором, больше не может выполняться, и петля может перейти в граничный цикл, выход из которого, как правило, невозможно гарантировать.
Чтобы преодолеть эту трудность, желательно, чтобы аналого-цифровой преобразователь 19 при необходимости мог измерять не только выход увеличителя масштаба, но также его вход. Это потребует всего лишь применения мультиплексора 2 к 1, а также соответствующей стратегии управления.
В частной конфигурации датчика согласно первому или второму вариантам выполнения датчик содержит два электростатических маятниковых акселерометра, каждый из которых имеет схему возбуждения и детекторную схему, имеющие общую чувствительную ось.
Два метода, позволяющие устранить влияние смещения при обнаружении, основаны на использовании реакции γе на известную помеху. Если ускорение, действующее на датчик, имеет корреляции, сходные с сигналом модуляции, в результате получают частично ошибочную коррекцию оценочного ускорения. Применение фильтра Кальмана может уменьшить чувствительность к погрешности этого типа, но не позволяет ее устранить.
Если, например, на акселерометр действует белый шум при ускорении с эффективным значением 10 grms в частотном диапазоне от 0 до 10 кГц и если контур автоматического регулирования Δγ регулируют с полосой пропускания 0,01 Гц, в результате получают погрешность компенсации 10 mgrms, недопустимую для некоторых приложений, таких как навигационные приложения.
Эту проблему можно решить за счет применения двух акселерометров, идентичных описанному выше акселерометру, чувствительные оси которых совпадают. При этом достаточно применить модуляцию zm или λ только для одного из двух акселерометров и автоматически отрегулировать на ноль реакцию разности значений Δγ. В этом случае эффект действующего ускорения устраняется при асимметрии коэффициента усиления и установки оси возле двух акселерометров.
Поскольку коэффициент усиления двух акселерометров калиброван, разность коэффициентов оказывается меньше 100 частей на миллион, что уменьшает погрешность от 10 mgrms до 1 μgrms. Однако действующее ускорение проявляется также через необработанные разности установки оси, которые имеют значение менее 100 мрад. Вместе с тем, это ограничение позволяет уменьшить в 100 раз первоначальный дефект, который переходит от 10 mgrms до 100 μgrms, то есть до значения, допустимого для нормальной навигационной системы.
Предпочтительно модуляцию можно применить сначала к одному, затем к другому из двух акселерометров, чтобы получать одновременно избыточную и точную информацию. В целом достаточно использовать для двух акселерометров некоррелированные между собой сигналы модуляции. Подобный составной акселерометр называют двойным акселерометром.
Если ограничения, связанные с установкой оси, считаются неприемлемыми, их влияние можно уменьшить еще больше, комбинируя оценки и модуляции трех двойных акселерометров, чувствительные оси которых имеют независимые и предпочтительно ортогональные между собой направления.
Дефект, связанный с необработанными разностями установок оси, ограничивают при этом остатком от моделирования и старением, благодаря заводской калибровке, которая позволяет определить нижеследующую матрицу компенсации:
Вектор  является вектором 6×1, состоящим из 6 данных, полученных от 6 акселерометров, матрица М является матрицей 6×6, которая корректирует погрешности коэффициента усиления и установки оси 6 акселерометров. Вектор
является вектором 6×1, состоящим из 6 данных, полученных от 6 акселерометров, матрица М является матрицей 6×6, которая корректирует погрешности коэффициента усиления и установки оси 6 акселерометров. Вектор  является вектором 6×1, состоящим из 6 скорректированных попарно избыточных некоррелированных данных.
является вектором 6×1, состоящим из 6 скорректированных попарно избыточных некоррелированных данных.
Использование в сочетании с применением 6 некоррелированных между собой данных позволяет уменьшить вес погрешностей коэффициента усиления и установки оси до менее 100 частей на миллион, что дает остаточный дефект менее 1 μgrms.
Разумеется, изобретение не ограничивается описанными вариантами выполнения и охватывает любую версию, входящую в объем защиты изобретения, определенный формулой изобретения.
В частности, электроника датчика может иметь структуру, отличную от описанной выше. Например, схему возбуждения из первого варианта выполнения можно использовать с детекторной схемой из второго варианта выполнения, и детекторную схему из первого варианта выполнения можно использовать со схемой возбуждения из второго варианта выполнения.
Кроме того, изобретение можно применять для любого типа электростатического маятникового акселерометра. Так, механика датчика может иметь структуру, отличную от описанной выше. Например, сейсмическую массу можно соединить с корпусом при помощи другого числа шарниров, расположенных с возможностью обеспечения поворота или перемещения скольжением сейсмической массы относительно корпуса.
В случае, если датчик содержит два электростатических маятниковых акселерометра, можно предусмотреть только одну схему возбуждения для обоих акселерометров.
Следует отметить, что предпочтительно можно менять на обратный порядок фаз обнаружения D1 и D2 в каждом периоде выборки, чтобы обеспечить симметрию измерений, производимых на каждой паре электродов.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТРИЧЕСКИЙ ДАТЧИК С ОБУСЛОВЛЕННЫМ ОБНАРУЖЕНИЕМ ЕМКОСТЕЙ | 2020 |
|
RU2815008C1 |
| МИКРОЭЛЕКТРОМЕХАНИЧЕСКИЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР, ИМЕЮЩИЙ ДВА ДИАПАЗОНА ИЗМЕРЕНИЯ | 2016 |
|
RU2697011C1 |
| ДАТЧИК ИНЕРЦИАЛЬНОЙ ПЕРВИЧНОЙ ИНФОРМАЦИИ | 1992 |
|
RU2018133C1 |
| СПОСОБ СБОРКИ ГИРОСКОПОВ И ВИБРАЦИОННЫЙ ГИРОСКОП | 2007 |
|
RU2334946C1 |
| ДАТЧИК ИНЕРЦИАЛЬНОЙ ПЕРВИЧНОЙ ИНФОРМАЦИИ | 1992 |
|
RU2119645C1 |
| СПУТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2016 |
|
RU2627014C1 |
| Способ обеспечения виброустойчивости маятникового акселерометра линейных ускорений с цифровой обратной связью и виброустойчивый маятниковый акселерометр | 2015 |
|
RU2615221C2 |
| МИКРОМЕХАНИЧЕСКИЙ ДАТЧИК И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2003 |
|
RU2251114C1 |
| МИКРОАКСЕЛЕРОМЕТР | 2012 |
|
RU2490650C1 |
| ДАТЧИК С ПОДВИЖНЫМ ЧУВСТВИТЕЛЬНЫМ ЭЛЕМЕНТОМ, РАБОТАЮЩИМ В СМЕШАННОМ ВИБРИРУЮЩЕМ И МАЯТНИКОВОМ РЕЖИМЕ, И СПОСОБЫ УПРАВЛЕНИЯ ТАКИМ ДАТЧИКОМ | 2014 |
|
RU2632264C1 |


Группа изобретений относится к датчику с электростатическим маятниковым акселерометром и к способу управления таким датчиком. Акселерометрический датчик содержит по меньшей мере один электростатический маятниковый акселерометр, имеющий первый и второй неподвижные электроды, закрепленные на корпусе и соединенные со схемой возбуждения, и третий электрод, установленный на маятнике, соединенном с корпусом, с возможностью перемещения и связанный с детекторной схемой. Схема возбуждения имеет выход, соединенный с переключателем, связанным с первым и вторым электродами, при этом переключатель имеет первое положение соединения и второе положение соединения, чтобы селективно соединять со схемой возбуждения первый электрод и второй электрод, при этом схема возбуждения, переключатель и детекторная схема соединены со схемой управления, выполненной таким образом, чтобы первый и второй электроды возбуждались импульсами таким образом, чтобы удерживать маятник в заданном положении и определять ускорение, действующее на маятник. Технический результат – повышение точности определения ускорения. 2 н. 12 з.п. ф-лы, 4 ил.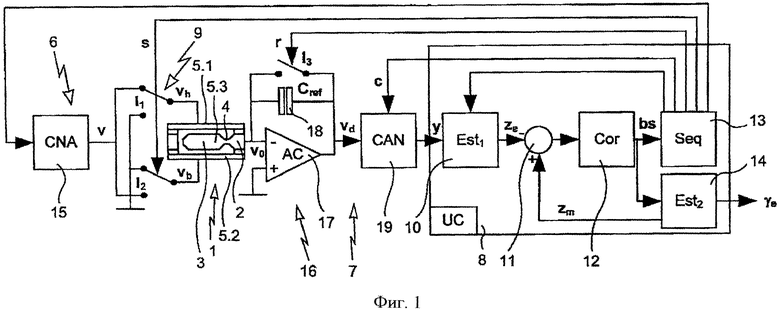
1. Способ управления датчиком, содержащим по меньшей мере один электростатический маятниковый акселерометр с первым и вторым неподвижными электродами, закрепленными на корпусе и соединенными со схемой возбуждения, и с третьим электродом, установленным на маятнике, соединенном с корпусом, с возможностью перемещения и связанным с детекторной схемой, содержащий следующие этапы:
- во время двух последовательных фаз обнаружения поочередно возбуждают один и затем другой из неподвижных электродов при помощи детекторных импульсов для определения первой емкости и второй емкости между подвижным электродом и соответствующими неподвижными электродами,
- оценивают положение маятника на основании определенных емкостей,
- определяют погрешность регулирования, соответствующую разности между оценочным положением и заданным положением,
- на основании погрешности регулирования определяют команду, определяющую, будет ли следующий детекторный импульс отталкивать или притягивать маятник,
- измеряемое ускорение вычисляют в зависимости от заданного положения и от определенной команды,
- во время фазы управления возбуждают один или другой из неподвижных электродов при помощи управляющих импульсов, чтобы привести к нулю погрешность регулирования.
2. Способ по п. 1, в котором заданное положение модулируют по временному профилю, определяемому таким образом, чтобы реакция на определенную команду была пропорциональна разности между электростатической жесткостью и механической жесткостью между маятником и корпусом.
3. Способ по п. 2, в котором реакцию на команду при указанной модуляции устраняют, корректируя форму или продолжительность детекторных импульсов таким образом, чтобы электростатическая жесткость компенсировала механическую жесткость.
4. Способ по п. 1, в котором заданное положение корректируют, чтобы компенсировать погрешность оценки положения.
5. Способ по п. 1, в котором этапы повторяют по периодам, при этом фазы обнаружения первой и второй емкостей меняют местами от одного периода к другому.
6. Способ по п. 1, в котором этапы разделяют фазами релаксации, во время которых переключатель переустанавливают, так чтобы напряжение схемы возбуждения было равно нулю.
7. Акселерометрический датчик для осуществления способа по п. 1, содержащий по меньшей мере один электростатический маятниковый акселерометр с первым и вторым неподвижными электродами, закрепленными на корпусе и соединенными со схемой возбуждения, и с третьим электродом, установленным на маятнике, соединенном с корпусом, с возможностью перемещения и связанным с детекторной схемой, отличающийся тем, что схема возбуждения имеет выход, соединенный с переключателем, связанным с первым и вторым электродами, при этом переключатель имеет первое положение соединения и второе положение соединения, чтобы селективно соединять со схемой возбуждения первый электрод или второй электрод, при этом схема возбуждения, переключатель и детекторная схема соединены со схемой управления, выполненной таким образом, чтобы первый и второй электроды возбуждались серией импульсов таким образом, чтобы удерживать маятник в заданном положении и определять ускорение, действующее на маятник.
8. Датчик по п. 7, в котором схема возбуждения содержит цифроаналоговый преобразователь, соединенный с переключателем и управляемый схемой управления.
9. Датчик по п. 7, в котором схема возбуждения содержит генератор постоянного напряжения, соединенный через ключ с входом усилительного/фильтрующего каскада, выход которого образует выход схемы возбуждения.
10. Датчик по п. 7, в котором детекторная схема содержит главный усилительный каскад, имеющий вход, соединенный с третьим электродом, и выход, соединенный с входом аналого-цифрового преобразователя, выход которого соединен с блоком управления.
11. Датчик по п. 10, в котором главный усилительный каскад соединен с аналого-цифровым преобразователем через компенсирующий каскад, содержащий первый резистор и второй резистор, последовательно соединенные между выходом главного усилительного каскада и входом аналого-цифрового преобразователя, при этом компенсирующий каскад содержит дополнительный усилитель и ключ, соответственно установленные параллельно со вторым резистором, и цифроаналоговый преобразователь, соединенный со вторым резистором, с дополнительным усилителем и с ключом, при этом ключ и дополнительный усилитель соединены со схемой управления.
12. Датчик по п. 7, в котором схема управления выполнена с возможностью изменения положения переключателя, когда напряжение на выходе схемы возбуждения равно нулю.
13. Датчик по п. 7, в котором схема управления содержит первое оценочное устройство (10) для оценки положения маятника, имеющее вход, соединенный с детекторной схемой (7), и выход, соединенный с отрицательным входом сумматора (11), выход которого соединен с входом корректора (12), выход которого соединен с планировщиком (13) и со вторым оценочным устройством (14), имеющим выход, соединенный с суммирующим входом сумматора (11), и первый выход, выдающий оценочное значение ускорения, и второй выход, соединенный с положительным входом сумматора для ввода в него модулированного положения, при этом корректор выполнен с возможностью определения импульса, а планировщик выполнен с возможностью управления схемой возбуждения, переключателем и детекторной схемой.
14. Датчик по п. 7, содержащий по меньшей мере два электростатических маятниковых акселерометра, каждый из которых содержит схему возбуждения и детекторную схему и которые имеют по существу общую чувствительную ось.
| US 5812427 A, 22.09.1998 | |||
| US 6301965 B1, 16.10.2001 | |||
| US 7069784 B1, 04.07.2006 | |||
| МИКРОМЕХАНИЧЕСКИЙ ДАТЧИК ЛИНЕЙНЫХ УСКОРЕНИЙ | 2004 |
|
RU2265856C1 |

