ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение направлено на системы и способы, относящиеся к офтальмологической хирургии и, более конкретно, к контролю давления текучей среды во время офтальмологической операции.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
[0002] При офтальмологических хирургических процедурах текучие среды часто аспирируются от глаза во время процедуры. Например, в витреоретинальной хирургии может быть использовано устройство для аспирации материала стекловидного тела из глаза. В качестве другого примера, в хирургии катаракты может быть использовано устройство для фрагментации или эмульгирования хрусталика и аспирации разрушенного или эмульгированного хрусталика из глаза. При этих или других процедурах в глаз могут быть введены сбалансированный солевой раствор (BSS) или другая ирригационная текучая среда и удалены во время процедуры как часть аспирированной текучей среды.
[0003] При таких офтальмологических хирургических процедурах может быть желателен контроль давления аспирируемой текучей среды во время ее аспирации. Это может помочь оператору в управлении процедурой, контроле внутриглазного давления и/или определении наличия частичной или полной окклюзии в аспирационной линии. Дополнительно может быть желателен контроль давления текучей среды, вводимой в глаз. Это также может помочь оператору в управлении процедурой и/или контроле внутриглазного давления.
[0004] Известные системы для ирригации и аспирации текучей среды и/или измерения давления в офтальмологических процедурах раскрыты в патенте США № 6,261,283, патенте США № 6,293,926, патенте США № 6,572,349, патенте США № 6,632,214, патенте США № 6,740,074, патенте США № 6,902,542, патенте США № 6,962,488, патенте США № 7,393,189, патенте США № 8,011,905, патенте США № 8,545,198, патенте США № 8,790,096, патенте США № 9,482,216 и патенте США № 9,931,447, описания к которым включены в настоящий документ посредством ссылки во всей своей полноте. Датчики давления из известного уровня техники дополнительно раскрыты в патенте США № 5,910,110 и патенте США № 5,470,312, описания к которым включены в настоящий документ посредством ссылки во всей своей полноте.
[0005] Известные системы контроля давления текучей среды во время офтальмологических процедур включают использование тензометрического датчика для измерения отклонения мембраны при контакте с текучей средой и использование оптического измерения отклонения мембраны при контакте с текучей средой. Система с тензометрическим датчиком предполагает контакт тензопреобразователя с мембраной на противоположной относительно текучей среды стороне мембраны. Этот контактный способ может иметь ограниченную частотную характеристику и относительно высокий гистерезис и может требовать дополнительной защиты датчика для удовлетворения требований безопасности. Оптическая система предполагает отражение света от мембраны для измерения ее смещения. Поскольку это бесконтактный способ, такая система может быть чувствительной к оптической регулировке и/или изменениям качества поверхности мембраны.
[0006] Соответственно, существует потребность в улучшенных системах и способах контроля давления текучей среды при офтальмологических процедурах.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0007] Настоящее изобретение относится к системам и способам измерения давления текучей среды в офтальмологической хирургической системе.
[0008] В некоторых вариантах осуществления офтальмологическая хирургическая система содержит рукоятку с рабочим наконечником для проведения офтальмологической хирургической процедуры внутри глаза; ирригационную систему для доставки ирригационной текучей среды к глазу во время офтальмологической хирургической процедуры, при этом ирригационная система содержит ирригационный источник, ирригационный канал в рукоятке и ирригационную трубку между ирригационным источником и ирригационным каналом в рукоятке; аспирационную систему для аспирации текучей среды от глаза во время офтальмологической хирургической процедуры, при этом аспирационная система содержит аспирационный канал в рукоятке, аспирационную трубку, проходящую от аспирационного канала в рукоятке, и насос для обеспечения отсасывания через аспирационную трубку и аспирационный канал в рукоятке; и систему с вихретоковым датчиком давления. В некоторых вариантах осуществления пример системы с вихретоковым датчиком давления содержит проводящую подвижную мембрану, имеющую первую сторону и вторую сторону, при этом первая сторона мембраны обращена к каналу для прохождения потока либо для аспирационной текучей среды, аспирируемой от глаза, либо для ирригационной текучей среды, доставляемой к глазу; и вихретоковый датчик положения, размещенный на второй стороне мембраны без контакта с мембраной, при этом вихретоковый датчик положения содержит обмотку датчика положения, выполненную с возможностью возбуждения переменным током высокой частоты, и электронные устройства для преобразования сигналов, выполненные с возможностью определения изменения индуктивности или импеданса или изменения резонансной частоты в обмотке датчика положения при изменении зазора между мембраной и обмоткой датчика положения и с возможностью преобразования этого изменения в сигнал смещения, согласующийся с давлением текучей среды.
[0009] В некоторых вариантах осуществления обмотка датчика положения размещена в непроводящем корпусе. В некоторых вариантах осуществления вихретоковый датчик положения содержит высокочастотный генератор для возбуждения обмотки датчика положения при высокой частоте.
[0010] В некоторых вариантах осуществления офтальмологическая хирургическая система содержит струйный модуль в сочетании со струйной кассетой, при этом струйный модуль и струйная кассета вместе содержат ирригационный канал, через который ирригационная текучая среда доставляется к глазу во время офтальмологической хирургической процедуры, аспирационный канал, через который аспирированная текучая среда удаляется от глаза во время офтальмологической хирургической процедуры, и систему с вихретоковым датчиком давления, как раскрыто в настоящем документе.
[0011] В некоторых вариантах осуществления способ измерения давления текучей среды в офтальмологической хирургической системе включает прохождение текучей среды через канал для прохождения потока текучей среды во время офтальмологической хирургической процедуры, при этом проводящая подвижная мембрана расположена так, что первая сторона мембраны обращена к каналу для прохождения потока текучей среды; возбуждение обмотки датчика положения переменным током высокой частоты, при этом обмотка датчика положения расположена на второй стороне мембраны без контакта с мембраной; и определение изменения индуктивности, или импеданса, или резонансной частоты в обмотке датчика положения при изменении зазора между мембраной и обмоткой датчика положения вследствие изменения давления текучей среды в канале для прохождения потока текучей среды и преобразование этого изменения в сигнал смещения, согласующийся с давлением текучей среды. В некоторых вариантах осуществления канал для прохождения потока текучей среды может представлять собой аспирационный канал. В некоторых вариантах осуществления канал для прохождения потока текучей среды может представлять собой ирригационный канал.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
[0012] На сопроводительных графических материалах изображены варианты осуществления систем и способов, раскрытых в настоящем документе, и вместе с описанием они служат для объяснения принципов настоящего изобретения.
[0013] На фиг. 1 изображен пример офтальмологической хирургической консоли, которая может быть использована в системах и способах согласно настоящему изобретению.
[0014] На фиг. 2 представлено схематическое изображение примера струйной системы, которая может быть использована в системах и способах согласно настоящему изобретению.
[0015] На фиг. 3 изображен разобранный вид примера кассеты, которая может быть использована в системах и способах согласно настоящему изобретению.
[0016] На фиг. 4 изображены примеры мембраны и струйного модуля, который является частью офтальмологической хирургической консоли, которая может быть использована в системах и способах согласно настоящему изобретению.
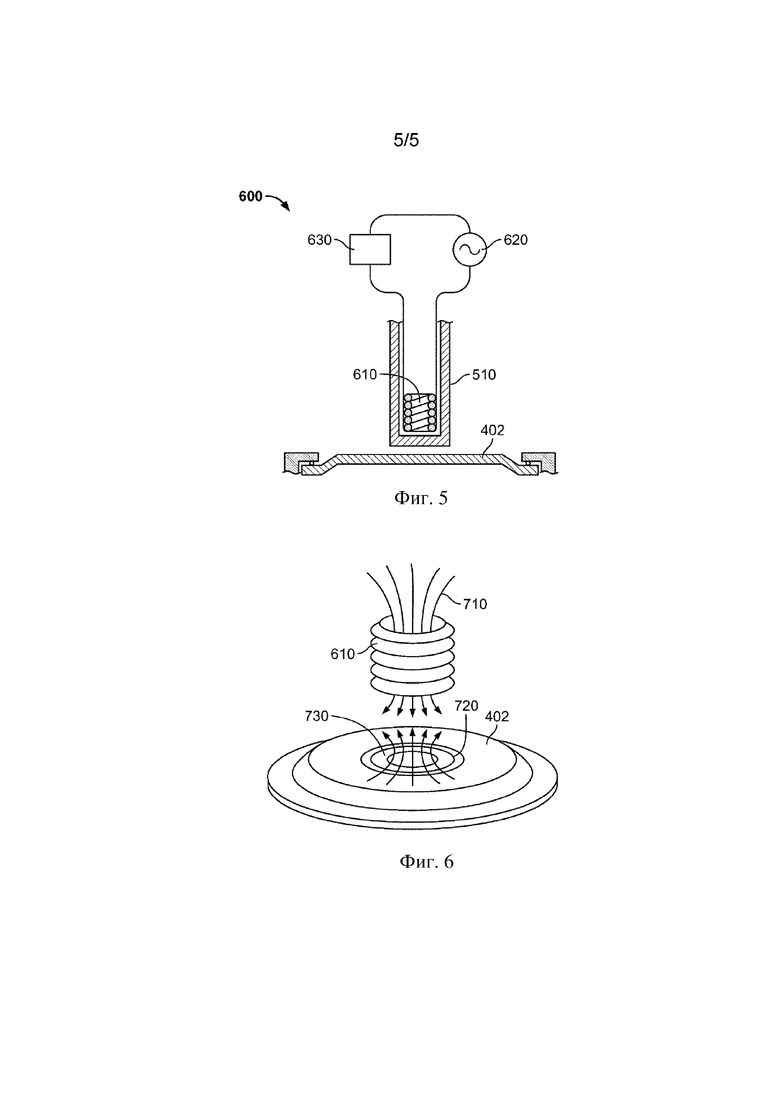
[0017] На фиг. 5 представлено схематическое изображение примера датчика давления, который может быть использован в системах и способах согласно настоящему изобретению.
[0018] На фиг. 6 представлено схематическое изображение датчика давления по фиг. 6, показывающее магнитные поля и индукционные вихревые токи.
[0019] Сопроводительные графические материалы могут быть лучше поняты из следующего подробного описания.
ПОДРОБНОЕ ОПИСАНИЕ
[0020] В целях способствования пониманию принципов настоящего изобретения далее будет сделана ссылка на варианты реализации, изображенные на графических материалах, и для их описания будет использована специальная терминология. Тем не менее, следует понимать, что это не предполагает каких-либо ограничений объема настоящего изобретения. Как в целом будет очевидно специалисту в области техники, к которой относится изобретение, любые изменения и дополнительные модификации в отношении описанных систем, устройств, инструментов, способов и любого другого применения принципов настоящего изобретения являются полностью предусмотренными. В частности, признаки, компоненты и/или этапы, описанные в отношении одного варианта осуществления, могут быть объединены с признаками, компонентами и/или этапами, описанными в отношении других вариантов осуществления настоящего изобретения. Для простоты в некоторых случаях используются одни и те же номера ссылок на всех графических материалах в отношении одних и тех же или подобных элементов.
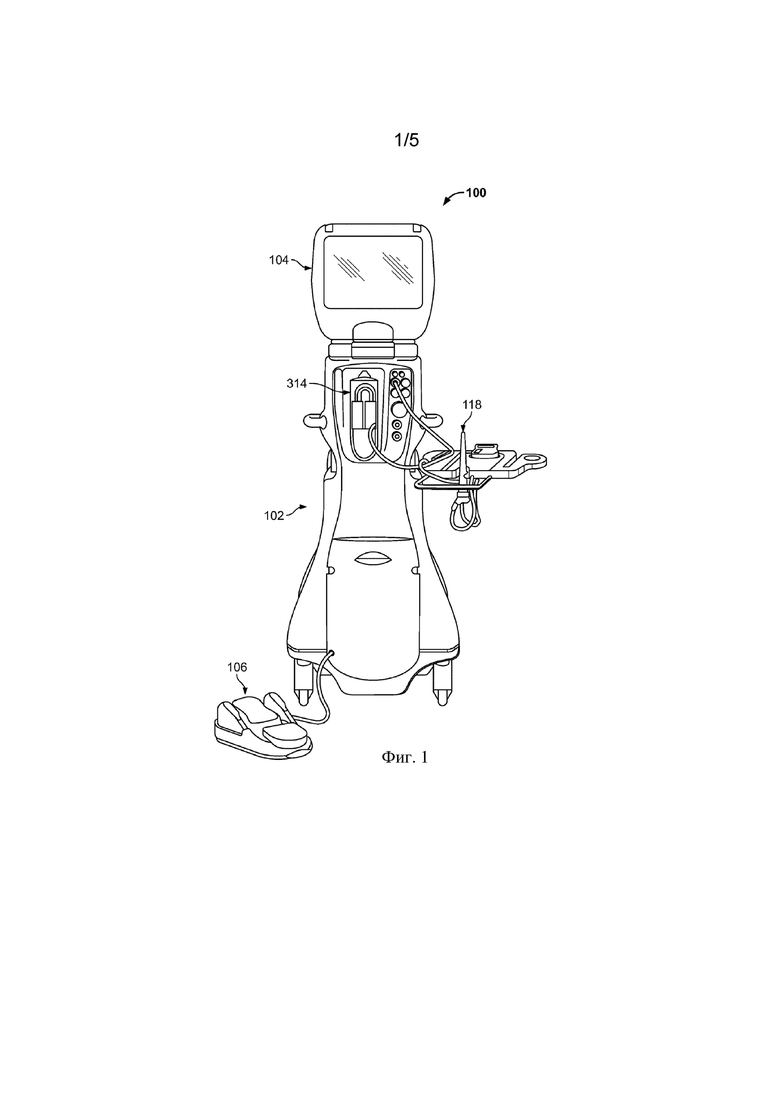
[0021] На фиг. 1 изображен пример офтальмологической хирургической консоли 100, которая может быть использована в системах и способах согласно настоящему изобретению. Офтальмологическая хирургическая консоль 100 может быть подобна офтальмологическим хирургическим консолям, как показано и описано в патенте США № 9,931,447, полное раскрытие которого в явном виде включено в настоящий документ посредством ссылки. Офтальмологическая хирургическая консоль 100 может быть подобна известным и используемым офтальмологическим хирургическим консолям, таким как CONSTELLATION® Vision System, предлагаемым Alcon Laboratories, Inc. (Форт-Уэрт, Техас), или CENTURION® Vision System, предлагаемым Alcon Laboratories, Inc. (Форт-Уэрт, Техас), или любой другой офтальмологической хирургической консоли, подходящей для использования согласно принципам, описанным в настоящем документе.
[0022] Как показано на фиг. 1, пример офтальмологической хирургической консоли 100 содержит корпус 102 с компьютерной системой, расположенной в нем, и связанный с ней экран 104 дисплея, показывающий данные, относящиеся к работе и производительности системы во время офтальмологической хирургической процедуры. Консоль 100 также содержит ножную педаль 106, которую оператор может использовать для управления одной или несколькими функциями.
[0023] Консоль 100 содержит одну или несколько систем, которые могут быть использованы при выполнении офтальмологической хирургической процедуры. Например, консоль 100 содержит струйную систему 200 (фиг. 2), которая содержит ирригационную систему для доставки текучей среды к глазу и аспирационную систему для аспирации текучей среды от глаза. Консоль 100 может также содержать систему ультразвукового генератора для приведения в действие рукоятки ультразвуковых колебаний, например, для факоэмульсификации во время хирургии катаракты, и/или систему пневматического витреотома для приведения в действие рукоятки для витрэктомии. Системы могут перекрываться и взаимодействовать для выполнения различных аспектов процедур.
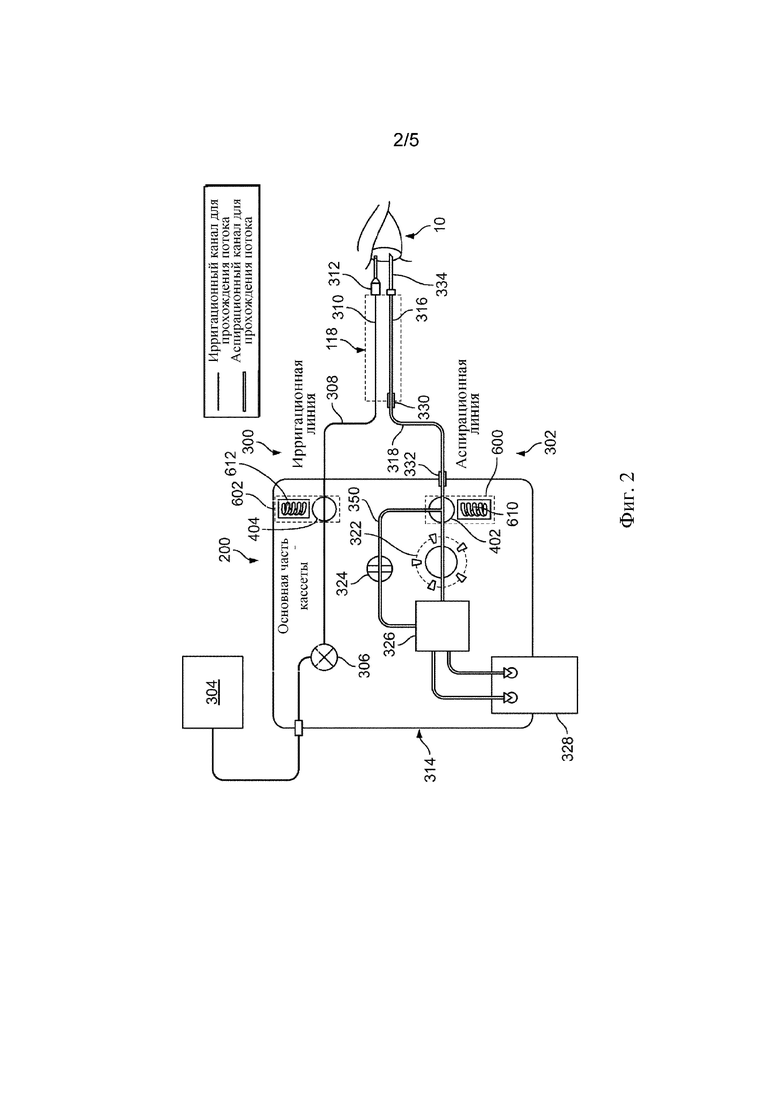
[0024] На фиг. 2 представлено схематическое изображение примера струйной системы 200, которая может быть использована в системах и способах согласно настоящему изобретению. Струйная система 200 может быть подобна струйным системам, как показано и описано в патенте США № 9,931,447, или подобна известным и используемым струйным системам, таким как представленные в CONSTELLATION® Vision System, или в CENTURION® Vision System, или подобна любой другой струйной системе, подходящей для использования согласно принципам, описанным в настоящем документе.
[0025] Струйная система 200 содержит ирригационную систему 300 и аспирационную систему 302, каждая из которых сообщается с рукояткой 118. Ирригационная система 300 содержит ирригационный источник 304, такой как резервуар для стерильного раствора, ирригационный клапан 306, который регулирует поток из резервуара к области хирургического вмешательства, гибкую ирригационную трубку 308, ирригационный канал 310 в рукоятке 118 и патрубок 312, который можно рассматривать как компонент рукоятки 118. Рукоятка 118 содержит рабочий наконечник 334 (такой как наконечник для факоэмульсификации или игла для витрэктомии), и в некоторых вариантах осуществления ирригационный патрубок 312 может быть расположен рядом с рабочим наконечником 334.
[0026] Ирригационная система 300 из примера проходит между ирригационным источником 304 и рукояткой 118 и переносит ирригационную текучую среду по ирригационному каналу для прохождения потока к области хирургического вмешательства (обозначена на фиг. 2 как глаз 10) во время хирургической процедуры. Ирригационный источник 304 может представлять собой источник текучей среды под механическим давлением, такой как, например, система прижимного давления. В других вариантах осуществления ирригационный источник 304 может представлять собой источник, подвешенный на штатив (например, штатив для внутривенных вливаний), который может быть регулируемым или нерегулируемым. Могут быть использованы другие источники текучей среды. В одном примере стерильная текучая среда представляет собой физиологический раствор; тем не менее, могут быть использованы другие текучие среды.
[0027] В некоторых вариантах осуществления ирригационная трубка 308 образована из множества сегментов, при этом некоторые сегменты являются жесткими, а остальные гибкими. Также в некоторых вариантах осуществления по меньшей мере часть ирригационной системы 300 выполнена в кассете 314, которая взаимодействует с консолью 100 по фиг. 1 для обеспечения сообщения по текучей среде между ирригационным источником 304 и глазом 10 пациента. Давление текучей среды в ирригационном канале для прохождения потока можно контролировать с помощью датчика давления в рукоятке или с помощью датчика 602 давления (как описано ниже).
[0028] Пример аспирационной системы 302 содержит аспирационный канал 316 в рукоятке 118, гибкую аспирационную трубку 318, насос 322, дыхательный клапан 324, резервуар 326 дренажной линии и дренаж или дренажный резервуар 328. Соединитель рукоятки 330 соединяет аспирационный канал 316 в рукоятке 118 с аспирационной трубкой 318. Соединитель 332 кассеты соединяет аспирационную трубку 318 с аспирационной линией в кассете 314. Как можно видеть, аспирационная система 302 проходит от области хирургического вмешательства (глаз 10) к дренажному резервуару 328. Аспирационная система 302, содержащая аспирационный канал 316 для прохождения текучей среды, может находиться в сообщении по текучей среде с отверстием рабочего наконечника 334 рукоятки 118. Аспирационная система 302 используется для аспирации текучей среды, так же как и любых других материалов, подлежащих аспирации от глаза, таких как эмульгированные частицы или волокна стекловидного тела, по аспирационному каналу для прохождения потока от глаза во время хирургической процедуры.
[0029] В некоторых вариантах осуществления аспирационная трубка 318 образована из множества сегментов, при этом некоторые сегменты являются жесткими, а остальные гибкими. Также в некоторых вариантах осуществления по меньшей мере часть аспирационной системы 302 выполнена в кассете 314, которая взаимодействует с консолью 100 по фиг. 1 для обеспечения сообщения по текучей среде между рукояткой 118 и дренажным резервуаром 328. Дренажный резервуар 328 может представлять собой мешок или любую подходящую емкость, и в некоторых вариантах осуществления он может представлять собой дренаж вместо отдельного резервуара.
[0030] При блокировании аспирационного пути, например, при вхождении фрагментов хрусталика и закупоривании ими частей аспирационного пути во время хирургической операции, хирургическая система может обнаруживать вакуум, или разницу давления, с помощью датчика давления в рукоятке или с помощью датчика 600 давления (как описано ниже). Хирургическая система может управлять дыхательным клапаном 324 для его открытия и сброса вакуума или разницы давления в аспирационном пути и для уменьшения эффекта от блокирования. Это уменьшает величину какой-либо возникающей волны и поддерживает заданный уровень вакуума, чтобы не снижать эффективность процедуры.
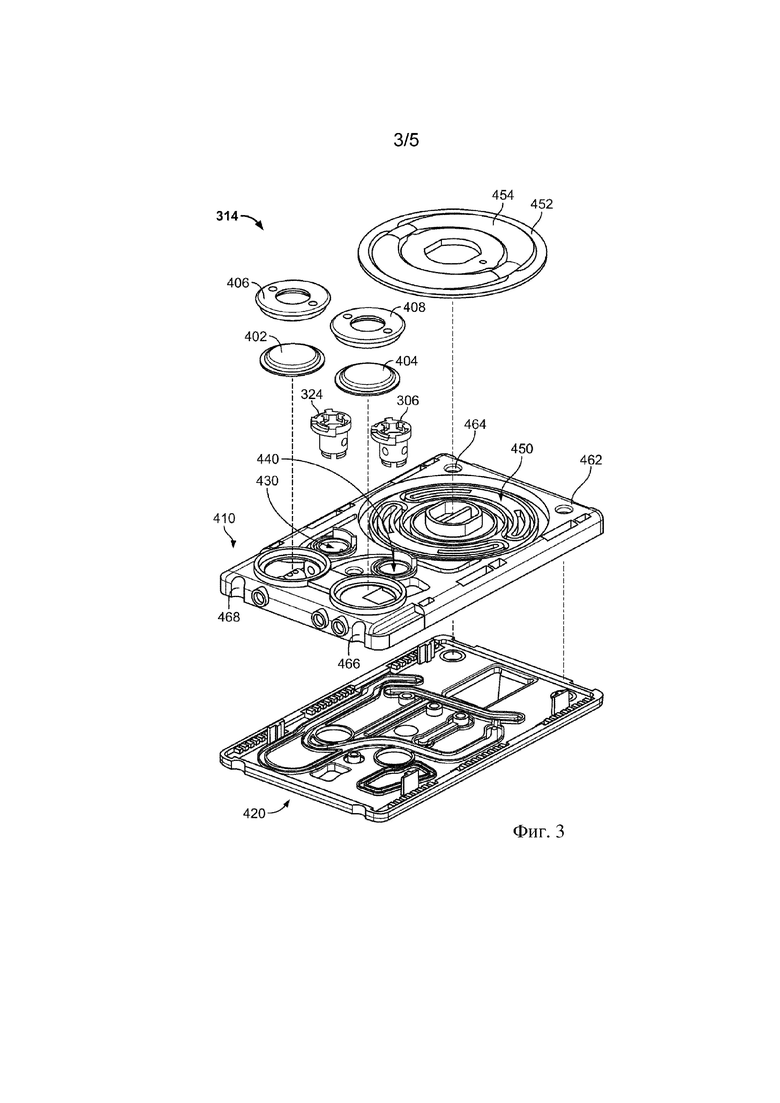
[0031] На фиг. 3 изображен разобранный вид примера кассеты 314, которая может быть использована со струйной системой 200 по фиг. 2 согласно настоящему изобретению. Основная часть кассеты 314 может быть образована верхним корпусом 410 и нижним корпусом 420, соединенными друг с другом. Корпусы 410 и 420 могут быть образованы из жесткого термопластичного материала, такого как поликарбонат и/или полисульфон, для обеспечения жесткости и структуры. Часть 450 в виде поверхности для взаимодействия с насосом может быть расположена в кассете 314 для зацепления с насосом 322. Насос 322 может представлять собой эластомерный насос, выполненный с возможностью нагнетания потока текучей среды в аспирационный канал для прохождения потока. Крышка 452 с дугообразной эластомерной крышкой 454 канала может быть размещена в качестве части насоса 322 над частью 450 в виде поверхности для взаимодействия с насосом. В кассете 314 также могут быть предусмотрены камера 430 для дыхательного клапана и камера 440 для ирригационного клапана. Камера 430 для дыхательного клапана может быть выполнена с возможностью вмещения дыхательного клапана 324. Камера 440 для ирригационного клапана может быть выполнена с возможностью вмещения ирригационного клапана 306.
[0032] Части ирригационного канала для прохождения потока и аспирационного канала для прохождения потока могут проходить в виде каналов и/или трубок внутрь корпуса кассеты 314. Камера 430 для дыхательного клапана может быть расположена в дыхательном канале 350, так что дыхательный клапан 324 может выборочно закрываться и открываться для обеспечения устранения вакуума через дыхательный канал 350. В некоторых вариантах осуществления дыхательный клапан 324 может представлять собой поворотный запорный клапан, выполненный из эластичного полимера высокой плотности, такого как полиэтилен или ацеталь, в результате чего дыхательный клапан 324 может быть запрессован в камеру 430 для дыхательного клапана. Таким образом, дыхательный клапан 324 может вращаться внутри камеры 430 для дыхательного клапана, приводимый в движение двигателем клапана (не показан) с преобразователем угол-код для выборочного открытия и закрытия дыхательного канала 350.
[0033] Кассета 314 имеет отверстия 462, 464 и вырезы 466, 468 для совмещения кассеты 314 с консолью 100 при вставке кассеты 314 в консоль 100. Кассета 314 может быть съемным и одноразовым или расходным изделием, которое может быть использовано для процедуры с одним пациентом. Новая кассета 314 может быть использована для новой процедуры.
[0034] На фиг. 3 также показана мембрана 402, которая может быть использована в датчике давления для аспирационной системы, и мембрана 404, которая может быть использована в датчике давления для ирригационной системы. Мембрана 402 удерживается на месте в кассете 314 с помощью стопорного кольца 406. Мембрана 404 удерживается на месте в кассете 316 с помощью стопорного кольца 408. Стопорные кольца 406, 408 могут быть прикреплены к корпусу кассеты 314, а мембраны 402, 404 могут быть закреплены между соответствующим стопорным кольцом 406, 408 и корпусом кассеты 314 и/или прикреплены иным способом к соответствующему стопорному кольцу 406, 408 и/или корпусу кассеты 314, например при помощи клея или сварки. Мембраны 402, 404 и их функции в датчике давления описаны ниже.
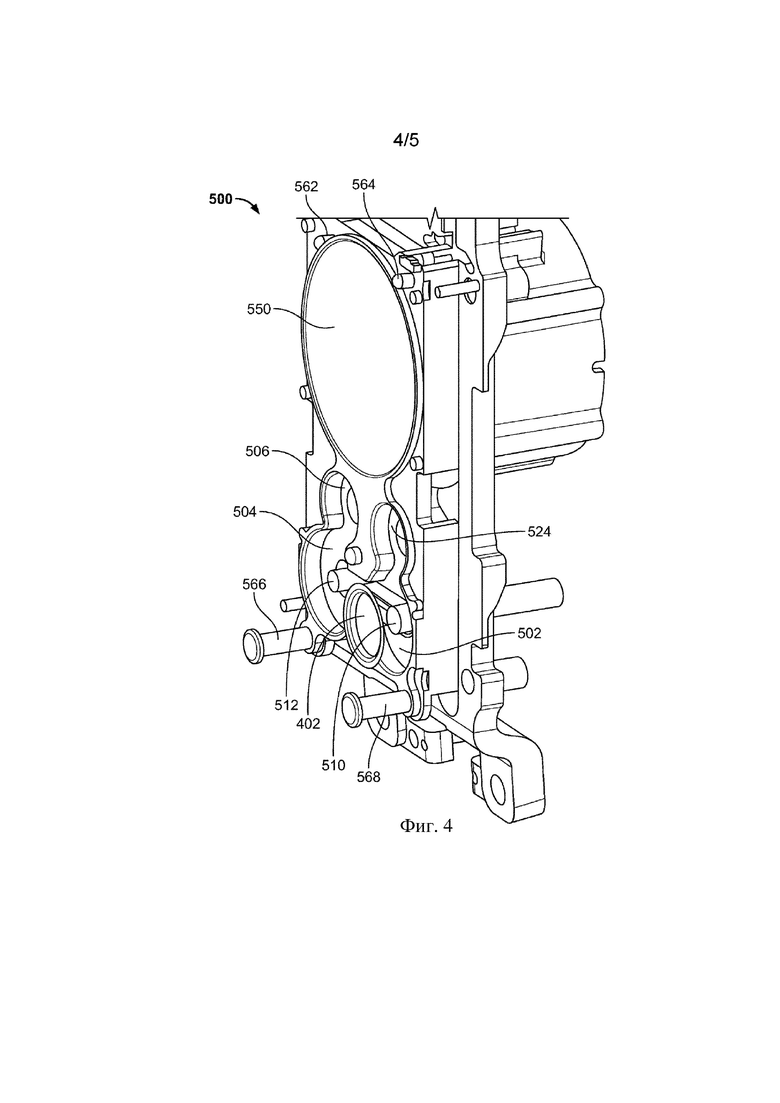
[0035] На фиг. 4 изображена мембрана 402 и струйный модуль 500, который является частью офтальмологической хирургической консоли 100, которая может быть использована в системах и способах согласно настоящему изобретению. Струйный модуль 500 выполнен с возможностью приема кассеты 314 и взаимодействия с кассетой 314, как частью струйной системы 200. Струйный модуль 500 имеет выступы 562, 564, которые совмещаются с отверстиями 462, 464 кассеты 314, и выступы 566, 568, которые совмещаются с вырезами 466, 468 кассеты, 314 для вставки кассеты 314 в консоль 100.
[0036] Струйный модуль 500 имеет область 550 корпуса насоса для вмещения механических частей насоса 322 для взаимодействия с дугообразной эластомерной крышкой 454 канала кассеты 314. Струйный модуль 500 имеет области 506, 524 для вмещения ирригационного клапана 306 и дыхательного клапана 324 соответственно. Струйный модуль 500 дополнительно имеет области 502, 504 для вмещения мембран 402, 404 соответственно. Области 502, 504 могут иметь форму и размер согласно мембранам 402, 404 соответственно. Например, мембраны 402, 404 могут быть круглыми, и области 502, 504 могут быть круглыми. Струйный модуль 500 может иметь непроводящий корпус 510 обмотки датчика давления для размещения обмотки датчика 600 давления и/или непроводящий корпус 512 обмотки датчика давления для размещения обмотки датчика 602 давления. В качестве альтернативы обмотка датчика 600 давления и/или обмотка датчика 602 давления могут быть выполнены с дорожками (например, из меди или другого подходящего проводника) на печатной схемной плате.
[0037] На фиг. 5 представлено схематическое изображение примера датчика 600 давления, который может быть использован в системах и способах согласно настоящему изобретению. Как показано на фиг. 5, датчик 600 давления содержит датчик положения, который содержит обмотку 610 датчика положения. Как будет понятно специалистам средней квалификации в данной области техники, обмотка 610 датчика положения изображена схематически. В некоторых вариантах осуществления, как упомянуто выше, обмотка 610 датчика положения (и/или обмотка 612 датчика положения датчика 602 давления) может быть выполнена с дорожками на печатной схемной плате. Как можно понять из фиг. 4 и 5 и описания в настоящем документе, датчик положения является бесконтактным датчиком, т.е. он не находится в физическом контакте с мембраной 402. Датчик положения также не находится в контакте с измеряемой текучей средой, поскольку мембрана изолирует текучую среду от датчика положения.
[0038] Мембрана 402 представляет собой проводящий лист или пластину, которая перемещается в ответ на давление текучей среды, оказываемое на нее. Например, мембрана 402 может представлять собой тонкий, металлический материал, такой как нержавеющая сталь или другой подходящий металлический или проводящий материал. В качестве примера мембрана может быть приблизительно 0,5 дюйма в диаметре и приблизительно 0,003 дюйма в толщину. Возможны и предусмотрены другие подходящие материалы, формы и размеры в пределах объема настоящего изобретения.
[0039] Обмотка 610 датчика положения представляет собой проводящую обмотку, которая является частью цепи переменного тока. Обмотка 610 датчика положения может быть относительно небольшой, например 2-4 миллиметра в диаметре и приблизительно 0,5 миллиметра в высоту, хотя возможны и предусмотрены другие подходящие размеры в пределах объема настоящего изобретения.
[0040] Система дополнительно содержит источник переменного тока, и высокочастотный генератор 620, и измерительное устройство 630, которое может содержать схему преобразования сигнала, которая измеряет импеданс, индуктивность или изменения резонансной частоты обмотки 610 датчика положения для выполнения измерений, как описано ниже. Высокочастотный генератор генерирует подходящую частоту для целей описанных ниже, например 2 МГц или любую другую подходящую частоту. Обмотка 610 датчика положения соединена с остальной частью схемы посредством проводов. При возбуждении обмотки 610 датчика положения высокочастотным генератором она генерирует магнитное поле благодаря току, проходящему через обмотку.
[0041] Датчик 600 давления работает как вихретоковый датчик давления. На фиг. 6 представлено схематическое изображение датчика 600 давления по фиг. 5, показывающее магнитные поля и индукционные вихревые токи. При возбуждении обмотки 610 датчика положения переменным током она генерирует магнитное поле 710 как показано. Это магнитное поле 710 индуцирует локальные электрические токи в виде вихревых токов 720 в пределах проводящей мембраны 402, которая находится в непосредственной близости от обмотки 610 датчика положения. Вихревые токи 720 генерируют магнитное поле 730, противоположное магнитному полю 710. Вихревые токи 720 и возникающее магнитное поле 730 приводят к изменению индуктивности, или импеданса, или резонансной частоты обмотки 610 датчика положения.
[0042] Как можно понять из фиг. 3, мембрана 402 находится в контакте с текучей средой, аспирируемой от глаза через аспирационную линию. Мембрана 402 является неинвазивной и изолирует текучую среду от остальной части датчика 600 давления. При изменении давления текучей среды на мембрану 402, положение мембраны 402 слегка изменяется в ответ на изменение давления. Следовательно, положение мембраны 402 изменяется относительно неподвижного положения обмотки 610 датчика положения. Эти изменения положения вызывают различные вихревые токи 720 и различные магнитные поля 730, что, в свою очередь, приводит к различиям в индуктивности, или импедансе, или резонансной частоте обмотки 610 датчика давления.
[0043] Измерительное устройство 630 выполнено с возможностью измерения изменений в индуктивности, или импедансе, или резонансной частоте обмотки 610 датчика положения. Электронные устройства для преобразования сигналов определяют изменение индуктивности, или импеданса, или резонансной частоты при изменении зазора между мембраной 402 и обмоткой 610 датчика положения. Электронные устройства для преобразования сигналов преобразуют это изменение в пригодный для использования сигнал смещения, т.е. на основе этих измерений датчик положения используется для определения положения мембраны 402. Электронные устройства для преобразования сигналов могут содержать доступные электронные устройства, такие как LDC 1614 Inductance to Digital Converter, предлагаемые Texas Instruments. Путем калибровки полученных положений с давлением текучей среды устанавливается соответствие, посредством которого на основе измерений измерительного устройства 630 определяется давление текучей среды. Таким образом, для определения давления текучей среды, воздействующей на мембрану 402, используется вихретоковый датчик 600 давления.
[0044] Тогда как датчик 600 давления изображен в качестве датчика давления для аспирационной текучей среды, вихретоковый датчик давления, как раскрыто в настоящем документе, также может быть использован в качестве датчика 602 давления для ирригационной текучей среды. Например, на фиг. 5 и 6 мембрана 402 может быть мембраной 404, датчик 600 давления может быть датчиком 602 давления, и обмотка 610 датчика положения может быть обмоткой 612 датчика положения (как схематически изображено на фиг. 2). Мембрана 404 может быть подобна мембране 402, как описано в настоящем документе, и датчик 602 давления для ирригационной текучей среды может быть выполнен и работать как описано в настоящем документе в отношении датчика 600 давления для аспирационной текучей среды. Если два или более вихретоковых датчика давления, как описано в настоящем документе, используются в одной и той же системе (например, один для аспирационной текучей среды и один для ирригационной текучей среды), для избежания помех может быть желательно использование разных датчиков на разных частотах.
[0045] Использование вихретокового датчика 600 и/или 602 давления в офтальмологической хирургической системе, как описано в настоящем документе, обеспечивает измерение давления текучей среды в офтальмологической процедуре бесконтактным, неинвазивным способом. Эта система обеспечивает преимущества над известными офтальмологическими хирургическими системами, в которых при контактном способе использовались тензометрические датчики, контактирующие с мембраной, что потенциально имеет недостатки, заключающиеся в ограниченной частотной характеристике и относительно высоком гистерезисе в дополнение к потенциальной дополнительной защите датчика для удовлетворения требований безопасности. В дополнение, использование вихретокового датчика 600 и/или 602 давления в офтальмологической хирургической системе, как описано в настоящем документе, обеспечивает преимущества над известными офтальмологическими хирургическими системами, которые использовали оптические датчики давления, что потенциально имеет недостатки, связанные с чувствительностью к оптической регулировке и/или изменениям качества поверхности мембраны. Использование вихретокового датчика 600 и/или 602 давления в офтальмологической хирургической системе, как описано в настоящем документе, не требует генерации света в виде узкого луча, сложных оптических регулировок или обработки изображений на высокой скорости, что необходимо для известных оптических датчиков давления в офтальмологических хирургических системах. Вместо этого использование вихретокового датчика 600 и/или 602 давления в офтальмологической хирургической системе, как описано в настоящем документе, предлагает более быстрый отклик и простую реализацию.
[0046] Использование вихретокового датчика 600 и/или 602 давления в офтальмологической хирургической системе, как описано в настоящем документе, является преимущественным также благодаря его компактным размерам и простоте в эксплуатации. Датчик положения не контактирует напрямую с мембраной. Датчик положения не требует четкого оптического изображения на мембране. Как датчик, так и управляющие электронные устройства могут иметь температурную компенсацию во время производственного процесса и дополнительную компенсацию во время работы.
Специалистам средней квалификации в данной области техники будет понятно, что варианты осуществления, охваченные описанием, не ограничены конкретными иллюстративными вариантами осуществления, описанными выше. В связи с этим, хотя иллюстративные варианты осуществления показаны и описаны, в вышеизложенном описании предусмотрен широкий диапазон модификаций, изменений и аналогов. Подразумевается, что такие изменения могут быть сделаны в отношении вышеизложенного без отклонения от объема настоящего изобретения. Соответственно, целесообразно, чтобы прилагаемая формула была истолкована широко и в соответствии с описанием.
Группа изобретений относится к медицине. Системы и способ раскрыты для измерения давления текучей среды в офтальмологической хирургической системе. Система содержит канал для прохождения потока текучей среды и систему с датчиком давления для измерения давления в канале для прохождения потока текучей среды. Система с датчиком давления содержит проводящую подвижную мембрану, имеющую первую сторону и вторую сторону, при этом первая сторона мембраны обращена к каналу для прохождения потока текучей среды, и вихретоковый датчик положения, расположенный на второй стороне мембраны без контакта с мембраной. Вихретоковый датчик положения содержит обмотку датчика положения, выполненную с возможностью возбуждения переменным током высокой частоты, и электронные устройства для преобразования сигналов, выполненные с возможностью определения изменения индуктивности, или импеданса, или резонансной частоты в обмотке датчика положения при изменении зазора между мембраной и обмоткой датчика положения и с возможностью преобразования этого изменения в сигнал смещения, согласующийся с давлением текучей среды. Способ измерения давления текучей среды может быть выполнен с применением системы. Применение данной группы изобретений позволит расширить арсенал технических средств измерения давления текучей среды в офтальмологической хирургической системе. 3 н. и 15 з.п. ф-лы, 6 ил.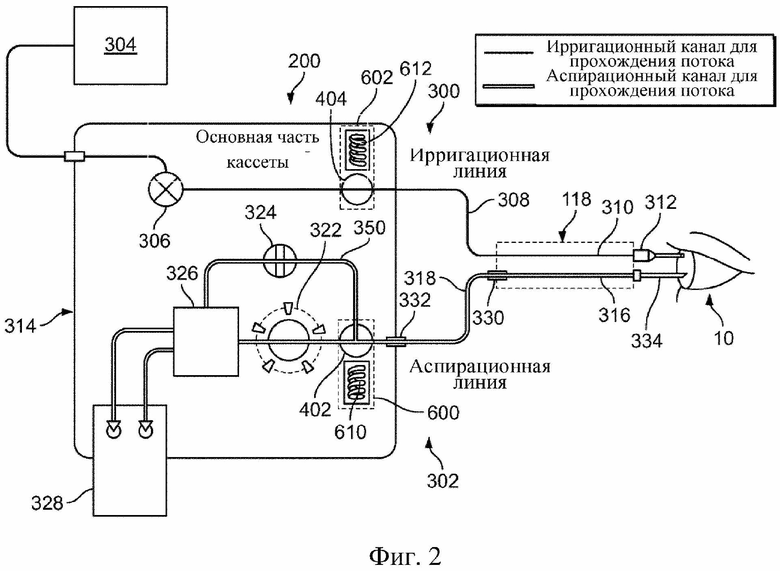
1. Офтальмологическая хирургическая система, содержащая:
рукоятку с рабочим наконечником для проведения офтальмологической хирургической процедуры внутри глаза;
ирригационную систему для доставки ирригационной текучей среды к глазу во время офтальмологической хирургической процедуры, при этом ирригационная система содержит ирригационный источник, ирригационный канал в рукоятке и ирригационную трубку между ирригационным источником и ирригационным каналом в рукоятке;
аспирационную систему для аспирации текучей среды от глаза во время офтальмологической хирургической процедуры, при этом аспирационная система содержит аспирационный канал в рукоятке, аспирационную трубку, проходящую от аспирационного канала в рукоятке, и насос для обеспечения отсасывания через аспирационную трубку и аспирационный канал в рукоятке; и
систему с датчиком давления, содержащую: проводящую подвижную мембрану, имеющую первую сторону и вторую сторону, при этом первая сторона мембраны обращена к каналу для прохождения потока либо для аспирационной текучей среды, аспирируемой от глаза, либо для ирригационной текучей среды, доставляемой к глазу;
высокочастотный генератор;
вихретоковый датчик положения, размещенный на второй стороне мембраны без контакта с мембраной, при этом вихретоковый датчик положения содержит обмотку датчика положения, выполненную с возможностью возбуждения переменным током высокой частоты, и электронные устройства для преобразования сигналов, выполненные с возможностью определения изменения индуктивности, или импеданса, или резонансной частоты в обмотке датчика положения при изменении зазора между мембраной и обмоткой датчика положения и с возможностью преобразования этого изменения в сигнал смещения, согласующийся с давлением текучей среды.
2. Офтальмологическая хирургическая система по п. 1, отличающаяся тем, что электронные устройства для преобразования сигналов выполнены с возможностью определения индуктивности в обмотке датчика положения.
3. Офтальмологическая хирургическая система по п. 1, отличающаяся тем, что электронные устройства для преобразования сигналов выполнены с возможностью определения импеданса в обмотке датчика положения.
4. Офтальмологическая хирургическая система по п. 1, отличающаяся тем, что электронные устройства для преобразования сигналов выполнены с возможностью определения резонансной частоты в обмотке датчика положения.
5. Офтальмологическая хирургическая система по п. 1, отличающаяся тем, что первая сторона мембраны обращена к каналу для прохождения потока для аспирационной текучей среды, аспирируемой от глаза.
6. Офтальмологическая хирургическая система по п. 1, отличающаяся тем, что первая сторона мембраны обращена к каналу для прохождения потока для ирригационной текучей среды, доставляемой к глазу.
7. Офтальмологическая хирургическая система по п. 1, отличающаяся тем, что обмотка датчика положения размещена в непроводящем корпусе.
8. Офтальмологическая хирургическая система, содержащая струйный модуль в сочетании со струйной кассетой, при этом струйный модуль и струйная кассета вместе содержат:
ирригационный канал для прохождения потока, через который ирригационная текучая среда доставляется к глазу во время офтальмологической хирургической процедуры;
аспирационный канал для прохождения потока, через который аспирированная текучая среда аспирируется от глаза во время офтальмологической хирургической процедуры; и
систему с датчиком давления, содержащую: проводящую подвижную мембрану, имеющую первую сторону и вторую сторону, при этом первая сторона мембраны обращена либо к ирригационному каналу для прохождения потока, либо к аспирационному каналу для прохождения потока;
высокочастотный генератор;
вихретоковый датчик положения, размещенный на второй стороне мембраны без контакта с мембраной, при этом вихретоковый датчик положения содержит обмотку датчика положения, выполненную с возможностью возбуждения переменным током высокой частоты, и электронные устройства для преобразования сигналов, выполненные с возможностью определения изменения индуктивности, или импеданса, или резонансной частоты в обмотке датчика положения при изменении зазора между мембраной и обмоткой датчика положения и с возможностью преобразования этого изменения в сигнал смещения, согласующийся с давлением текучей среды.
9. Офтальмологическая хирургическая система по п. 8, отличающаяся тем, что электронные устройства для преобразования сигналов выполнены с возможностью определения индуктивности в обмотке датчика положения.
10. Офтальмологическая хирургическая система по п. 8, отличающаяся тем, что электронные устройства для преобразования сигналов выполнены с возможностью определения импеданса в обмотке датчика положения.
11. Офтальмологическая хирургическая система по п. 8, отличающаяся тем, что электронные устройства для преобразования сигналов выполнены с возможностью определения резонансной частоты в обмотке датчика положения.
12. Офтальмологическая хирургическая система по п. 8, отличающаяся тем, что первая сторона мембраны обращена к аспирационному каналу для прохождения потока.
13. Офтальмологическая хирургическая система по п. 8, отличающаяся тем, что первая сторона мембраны обращена к ирригационному каналу для прохождения потока.
14. Офтальмологическая хирургическая система по п. 8, отличающаяся тем, что обмотка датчика положения размещена в непроводящем корпусе.
15. Способ измерения давления текучей среды в офтальмологической хирургической системе, при этом способ включает:
прохождение текучей среды через канал для прохождения потока текучей среды во время офтальмологической хирургической процедуры, при этом проводящая подвижная мембрана расположена так, что первая сторона мембраны обращена к каналу для прохождения потока текучей среды;
возбуждение обмотки датчика положения переменным током высокой частоты, при этом обмотка датчика положения расположена на второй стороне мембраны без контакта с мембраной;
определение изменения индуктивности, или импеданса, или резонансной частоты в обмотке датчика положения при изменении зазора между мембраной и обмоткой датчика положения вследствие изменения давления текучей среды в канале для прохождения потока текучей среды и преобразование этого изменения в сигнал смещения, согласующийся с давлением текучей среды.
16. Способ измерения давления текучей среды в офтальмологической хирургической системе по п. 15, отличающийся тем, что этап определения изменения индуктивности, или импеданса, или резонансной частоты в обмотке датчика положения включает определение изменения индуктивности в обмотке датчика положения.
17. Способ измерения давления текучей среды в офтальмологической хирургической системе по п. 15, отличающийся тем, что этап определения изменения индуктивности, или импеданса, или резонансной частоты в обмотке датчика положения включает определение изменения импеданса в обмотке датчика положения.
18. Способ измерения давления текучей среды в офтальмологической хирургической системе по п. 15, отличающийся тем, что этап определения изменения индуктивности, или импеданса, или резонансной частоты в обмотке датчика положения включает определение изменения резонансной частоты в обмотке датчика положения.
| WO 2011045037 A3, 21.04.2011 | |||
| Прибор для автоматического анализа жидкостей | 1934 |
|
SU54772A1 |
| WO 2017036652 A1, 09.03.2017 | |||
| US 9844613 B2, 19.12.2017. | |||
