Область технического применения
Настоящее изобретение относится к области технологий разведки и разработки нефти, в частности, к способу распознавания трещин в развертываемом изображении колонковой трубы бурового керна.
Предпосылки создания изображения
В области разведки и разработки нефтегазовых месторождений, залежи нефти с трещинами и нефтегазовые залежи под воздействием трещин занимают значительную долю доказанных запасов нефти и газа. Разрыв подземной среды без видимого смещения под действием поля напряжений называется трещиной. В качестве важного пути для транспортировки и накопления нефти и газа, трещины широко распространены в плотных песчаниках. Общий объем геологических ресурсов нефти плотных коллекторов в основных бассейнах Китая составляет около 11-13,5 млрд. тонн, в том числе высокопродуктивные районы в значительной степени подвержены влиянию развития трещин. С другой стороны, ресурсы сланцевой нефти обладают огромным потенциалом, а важным фактором, влияющим на их добычу, является степень развития трещин. Таким образом, изучение характеристик развития трещин в коллекторах становится особенно важным. Распознавание трещин может быть интерпретировано с помощью сейсмических данных; руководствуясь геологическими теориями и законами, используются теория распространения сейсмических волн и принципы способов сейсмической разведки, чтобы получить информацию о характеристиках развития трещин и разломов. Технология сейсмических атрибутов в настоящее время является распространенным средством прогнозирования развития трещин, которая может извлекать атрибуты из объема сейсмических данных или других объемов данных, полученных из-за данного объема сейсмических данных, чтобы получить дополнительную информацию о характеристиках изменений трещин, разломов и т.д. С другой стороны, могут быть обобщены характеристики развития трещин в исследовательской зоне за счет наблюдений за керном, определения шлифов, методов обычного каротажа и фотокаротажа. Наблюдения за керном часто рассчитывают трещины керна с помощью данных искусственных наблюдений, при этом существует большое отклонение. Осуществление точного описания и наблюдения трещин керна в коллекторах имеет больше значение для повышения эффективности разработки нефтегазовых залежей.
Распознавание трещин на изображениях очень важно не только в области разведки нефти и газа, но и в различной степени применимо при помощи соответствующих знаний в области строительства туннелей, железнодорожного транспорта, строительства мостов и медицинской визуализации. В последние годы, в области распознавания трещин на основе компьютерного зрения, направление исследований в основном разделено на две части: во- первых, на основе обработки цифровых изображений, осуществляется искусственное распознавание характеристик, и с использованием различных законов характеристик трещин, таких как частоты, края, HOG, градаций серого, текстуры и энтропия, некоторые условия распознавания характеристик устанавливаются для распознавания трещин; традиционная технология распознавания изображений в основном определяет больную зону с помощью значений градаций серого изображения, таких как метод Оцу, обнаружения края и алгоритма наращивания областей, и имеет хороший эффект распознание больных изображений с простым фоном и большим различием градаций серого, но в сложных фонах частота ошибок распознавания выше. Общая проблема традиционной технологии распознавания изображений заключается в низкой точности, высокой частоте ложных сигнализаций, неспособности распознавать болезни на уровне пикселов, талмудической обработке изображений с различными сложными фонами, неспособности гибко распознавать, необходимости вручную извлекать характеристики, и прямом влиянии метода предварительной обработки на эффект распознавания. Во-вторых, на основе глубокого обучения, создается сверточная сеть и используется эту сеть для автоматического поиска характеристик трещин, чтобы машина постоянно саморегулировала в соответствии с определенными законами для достижения эффекта приближения входных данных и выходных данных к этикетке. Принцип метода, основанного на глубоком обучении, заключается в том, чтобы достичь цели распознавания путем построения сетевой модели для обучения большого количества изображений. Этот метод имеет высокую скорость распознавания, но требует данных большого объема для достаточной подготовки, а построенный модель имеет большие размеры, низкую скорость расчетов и большую продолжительность, а характеристические параметры трещин еще не обрабатываются количественно.
Предмет изобретения
Для преодоления недостатков обработки цифровых изображений, настоящее изобретение предоставляет способ распознавания трещин разверткой колонковой трубы керна, который может повысить точность и эффективность извлечения трещин на сложных фонах.
Для достижения цели точного извлечения характеристик трещин в случае сильных помех сложного фона, конкретные шаги способа распознавания трещин в развертываемом изображении колонковой трубы керна включают в себя:
шаг 1: получение изображения с помощью промышленных камер и преобразование импортированного исходного изображения от формата RGB до пространственной области HSV;
шаг 2: распознавание характеристик трещин и их извлечение;
шаг 3: преобразование изображения в формат RGB и обработка изображений регулируемой яркости;
шаг 4: удаление этикетки керна; буровой керн обычно имеет идентификационную этикетку, которая серьезно влияет на распознавание трещин;
шаг 5: локальная бинаризация на основе блока изображения;
шаг 6: морфологическая обработка изображений.
Описание фигур
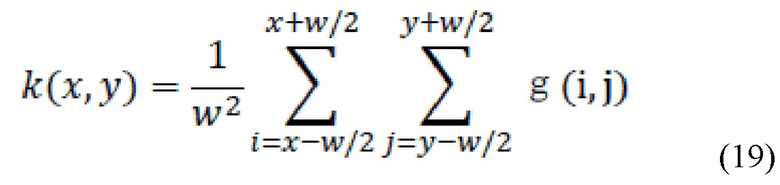
На Фиг. 1 показан способ распознавания трещин в развертываемом изображении колонковой трубы бурового керна.
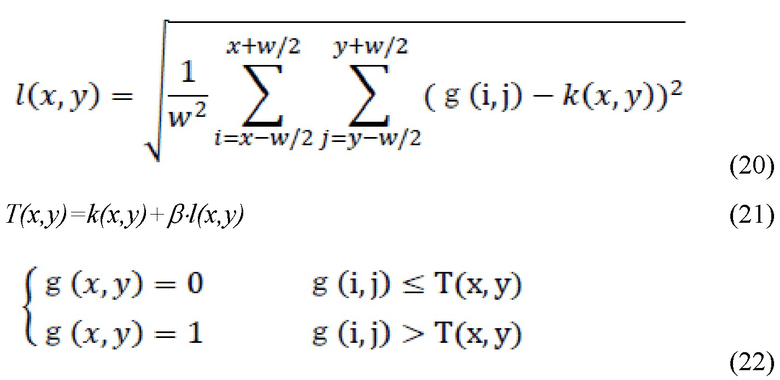
На Фиг. 2 показано исходное развертываемое изображение колонковой трубы бурового керна.
На Фиг. 3 показано изображение после обработки цветового пространства HSV.
На Фиг. 4 показано изображение цветовой пространственной области HSV после удаления этикетки.
На Фиг. 5 показано зональное бинарное изображение блока изображения.
На Фиг. 6 показано бинарное изображение обычного глобального порога.
На Фиг. 7 показано изображение после обработки способом настоящего изобретения.
Конкретный способ осуществления изобретения
Оптимизационный способ осуществления настоящего изобретения описан как ниже более подробно. Хотя оптимизационный способ осуществления настоящего изобретения описан как ниже, следует понимать, что настоящее изобретение может быть осуществлено различными способами, а не должно быть ограничено способом осуществления, описанным здесь. Напротив, эти способы осуществления предоставляются для того, чтобы сделать настоящее изобретение более прозрачным и полным, а также для того, чтобы полностью передать объем настоящего изобретения техническим специалистам в данной области.
В соответствии с процессом способа распознавания трещин в развертываемом изображении колонковой трубы бурового керна (Фиг. 1), предоставленного настоящим изобретением, этот процесс включает в себя следующие конкретные шаги:
В шаге 1, полный керн фиксируется и получается развертываемое изображение колонковой трубы керна с помощью промышленных камер, вращая керн на один круг. Полученное развертываемое изображение основано на нейрофизиологической перспективе, с тремя различными цветовыми рецепторами сетчатки, то есть, красный (R), зеленый (G), синий (B) - три основных цвета. В цветовом пространстве RGB, имеются три канала R, G и B, а диапазон каждого цветового канала находится в пределах [0, 255]. Пространство RGB может представлять в общей сложности 256×256×256 цветов. Наиболее часто используемым цветовым пространством в обработке изображений является модель RGB, которая часто используется для цветового отображения и обработки изображений. Средняя ось от исходной точки до белой вершины представляет собой линию градации серого. В традиционной обработке изображений на основе обработки изображения RGB регулируемой яркости, характеристики оттенка, такие как цветной тон, яркость, насыщенность, выражены вместе. При извлечении характеристик трещины, трещины, очевидно, имеют уникальный цветовой тон, яркость и насыщенность, а применение обработки изображения RGB равносильно бросанию характеристик трещины в цветовом пространстве. Поэтому для лучшего извлечения характеристик трещины, изображение RGB преобразовано в изображение цветовой пространственной области HSV. H (Hue) или H-канал представляет цветной тон, диапазоном значений в пределах 0-360°, и может быть понят как угол, то есть, диапазон значений замкнутого кольца. S (Saturation) или S-канал представляет насыщенность, диапазоном значений в пределах [0, 1]; насыщенность относится к степени свежести цвета, чем выше насыщенность, тем красочнее цвет изображения, и тем сильнее визуальный эффект, и наоборот, чем низкая насыщенность, тем слабее визуальный эффект. V (Value) или V-канал представляет интенсивность, диапазоном значений в пределах [0, 1], и относится к степени яркости цвета, то есть, интенсивность 0 цвета - черный, а интенсивность 1 - белый. В настоящем изобретении преобразуется изображение RGB в изображение HSV для обработки изображения цветовой пространственной области HSV. Преобразование изображения из цветового пространства RGB в цветовое пространство HSV осуществляется согласно следующему принципу:


Где, R′, G′ и B′ - отношение, соответствующее [0, 1] после преобразования значения каждого пиксела в трех каналах, Dmax, Dmin - максимальное и минимальное значения в R', G' и В', E - разница между максимальным и минимальным значениями, а H, S и V - значения цветного тона, насыщенности и интенсивности, соответственно. К этому времени, изображение RGB было преобразовано в изображение HSV для последующего извлечения основных характеристик трещины.
Еще дальше, в шаге 2 в развертываемом изображении колонковой трубы бурового керна, трещины являются в основном белыми и светлыми, а эта цветовая характеристика используется в качестве основной характеристики трещины, для извлечения характеристик. На исходном изображении (Фиг. 2), полученном и импортированном промышленной камерой, целевая трещина имеет белый и светлый цвет, но существуют сложный фон, черная поверхность керна, красная стрелка, этикетка, искусственные трещины, образовавшиеся при ручной манипуляции, а также другие вещества, такие как грязь, в процессе отбора керна; в настоящее время существующая обычная технология обработки цифровых изображений не специализируется на обработке развертываемых изображений колонковой трубы бурового керна, а после обычной предварительной обработки, то есть, сравнения выравнивания гистограммы после ограниченного адаптивного выравнивания гистограммы, и метода гауссовской фильтрации, хотя характеристики трещины усилены, но красная стрелка, искусственные трещины в соответствующем исходном изображении также усилены, и фон тоже сложен из-за неравномерного цвета поверхности керна. С помощью способа настоящего изобретения, после преобразования изображения RGB в изображение цветового пространства HSV, установки соответствующих значений параметров H, S и V, блокировки и извлечения белых и ярких характеристик трещин в исходном изображении, извлечения цветов HSV, а также заполнения фона, несоответствующего характеристикам трещин, черным цветом (Фиг. 3), заметно, что трещины могут быть полностью извлечены, избежав помех искусственных фальшивых трещин, красной стрелка и сложного фонового цвета.
Еще дальше, в шаге 3 выполнена последующая обработка развертываемого изображения колонковой трубы керна HSV после цветного извлечения, а также осуществлены преобразование изображения HSV в изображение RGB, и преобразование изображения RGB в изображение в градациях серого, в котором каждая точка изображения выражена черным цветом с различными насыщенностями, и число [0, 255] обозначает степень «серого цвета». Осуществлено преобразование изображения RGB, то есть, «трехмерного», с тремя каналами, в «двумерное» изображение с одним каналом градации серого. А отношение преобразования значения RGB и значения градации серого показано в следующей формуле:

где Grey является значением градации серого в пределах [0, 255], а R, G и B соответственно представляют значения в трех каналах RGB. В соответствии с этой формулой, по очереди считаются значения R, G, B каждой точки пиксела, вычисляются значения градации серого, присваивается значение градации серого для соответствующего положения изображения, и после того, как все точки пиксела подвергнуты вышеуказанному процессу один раз, завершена обработка изображений RGB регулируемой яркости.
Еще дальше, в шаге 4 буровой керн наклеен этикеткой, а на развертываемом изображении останется этикетка, что серьезно влияет на распознание трещин, и из-за сходства между характеристиками цвета этикетки и трещинами, этикета не удалась в изображения цветового пространства HSV, однако этикета имеет правильную прямоугольную форму и намного больше, чем ширина трещины. Установив подходящее скользящее окно ω×ω, при скольжении окна к этикетке окно полностью заполняется значением градации серого 255, в этот момент распознанная этикетка извлекается, и получается изображение в градациях серого колонковой трубы бурового керна, в котором удалена этикетка (Фиг. 4).
Еще дальше, в шаге 5 осуществлена зональная бинаризация полученного изображения в градациях серого на основе блока изображения. Бинаризация изображения является очень важным базовым методом обработки изображений, как правило, используется в качестве технологии предварительной обработки многих методов обработки изображений; например, в отношении извлечения края, распознавания целей, обработки формы, сегментации изображения и оптического распознавание символов, и т.д., сначала может быть осуществлена бинаризация изображения, а затем выполнена последующая обработка. Короче говоря, бинаризация имеет в виду нахождения порога в значениях градаций серого всех пикселов изображения в градациях серого; при превышении порога, присваивают значению градации серого 1, а при значении менее порога, присваивают значению градации серого 0, и так далее по аналогии всеми пикселами изображения, чтобы получить бинарное изображение. Текущие методы бинаризации на основе порогов могут быть разделены на метод глобального порога и метод локального порога. В методе глобального порога используется фиксированный порог для всего изображения, сравнивая значения градаций серого в изображении с порогом, чтобы разделить изображение на фон или цель. Этот метод может хорошо работать для изображений, где пикселы цели и фона могут четко различаться, но не достигает цели различия, когда фон сложен или загрязнен другими помехами. Чтобы преодолеть недостатки метода глобального порога, предыдущие ученые предложили много методов локального порога, в которых больше не выбирается фиксированный порог, а сравнивается значение пиксела в одной точке с значением пиксела в окружающей местной окрестности, и осуществляется адаптивная регулировка порога в соответствии с градациями серого пикселов в локальной окрестности, а эта точка пиксела будет подвергнута бинаризации в соответствии с адаптивным порогом. Сравнивая различные развертываемые изображения колонковой трубы керна, известно, что в цветовой пространственной области HSV, с точки зрения цветовых характеристик, по-прежнему, существует болезнь с теми же характеристиками, что и трещины, но уменьшаются многие помехи больных зон относительно обработки изображений RGB. Согласно определению бинарного изображения в (Фиг. 4), черная зона с градацией серого 0 является фоном, а белая зона с градацией серого 1 является целевой трещиной и больно зоной. Осуществляется бинаризация локального порога изображения. Сначала разделяется изображение в градациях серого на зоны в количестве m×n, а значения m и n могут быть выбраны по размеру исходного изображения для получения подходящих значений. Введено одно значение параметра μ, представляющее среднее абсолютное отклонение значений градаций серого в одной зоне, для определения изменения градаций серого пикселов в зоне. Формула приведена ниже:

где, S - сумма значений градаций серого пикселов в одной зоне, N - количество пикселов в каждой зоне,  значение градации серого пиксела № i в одной зоне, а ν - среднее значение пикселов в одной зоне, μ - среднее абсолютное отклонение значений градаций серого пикселов в одной зоне.
значение градации серого пиксела № i в одной зоне, а ν - среднее значение пикселов в одной зоне, μ - среднее абсолютное отклонение значений градаций серого пикселов в одной зоне.
Выбирают подходящее значение ϕ, и проверяют каждый блок на наличие больной зоны с помощью ϕ. μ (m, n) представляет собой среднее абсолютное отклонение блока зоны (m, n). Среднее абсолютное отклонение может представлять резкость изменения градаций серого в зоне; при наличии трещин, происходит резкое изменение градаций серого от фона, среднее абсолютное отклонение имеет большее значение, и наоборот, при наличии больной зоны или фоновой зоны в блоке зоны, изменение градации серого медленно, среднее абсолютное отклонение имеет меньшее значение. Поэтому, при μ (m, n)> ϕ, это указывает на то, что эта зона является целевой фоновой зоной, то есть, зона с наличием трещин; из-за того, что после извлечения цвета пространственной области HSV, зона с наличием трещин легко распознана из-за большой разницы изменений градаций серого трещины и фона. Таким образом, используется бинаризация по методу Оцу (Otsu), которая является представителем бинаризации глобального порога и адаптивным методом определения порога, предложенным японским ученым Нобуюки Оцу в 1979 г. Алгоритм предполагает, что в соответствии с порогом пикселы изображения могут быть разделены на фон и цель. Рассчитывается этот оптимальный порог для различия этих двух типов пикселов, так что два типа пикселов различаются в максимальной степени.
Принципиальная формула алгоритма Оцу указана как ниже:
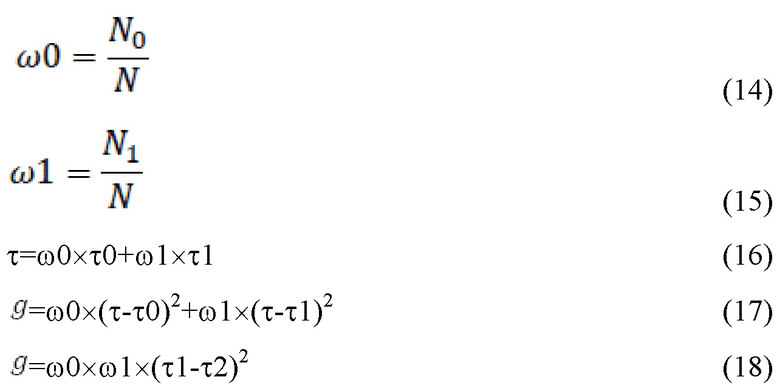
Предположим, что порог, позволяющий разделять цель и фон, обозначается как T, а значение градаций серого пикселов, превышающее порог T, является целью и, наоборот, фоном. При этом, N0, N1 является количеством пикселов, относящихся к цели и фону, N - общее количество пикселов в зоне №. (m, n), ω0, ω1 - отношение количества пикселов цели к общему количеству пикселов и отношение количества пикселов фона к общему количеству пикселов, соответственно, τ0, τ1 - среднее значение градаций серого пикселов цели и среднее значение градаций серого пикселов фона, τ - среднее значение градаций серого пикселов всего блока зоны,  - дисперсия между классами. Входя формулу (16) в формулу (17), получается конечная упрощенная формула формулы (18).
- дисперсия между классами. Входя формулу (16) в формулу (17), получается конечная упрощенная формула формулы (18).
При μ (m, n)≤ϕ, это означает, что зона находится в фоновой зоне или фоновой больной зоне, и для сегментации порогов выбран метод задания локального порога; существует много методов бинаризации локальных порогов, а здесь используется алгоритм Niblack, который представляет собой алгоритм бинаризации на основе локальных характеристиках изображения в градациях серого, со следующим принципом:
где, (x,y) - точка пикселов центра окна w×w, k(x,y) - выборочное среднее значение в окрестности w×w данной точки, l(x.y) стандартное отклонение в окрестности w×w данной точки, β - диапазон выбора поправочного коэффициента в [0, 1], g(x,y) - значение градаций серого пикселов данной точки, T(x,y) - порог бинаризации данной точки пикселов. Алгоритм Niblack может динамически определять пороги в каждой зоне для отличной обработки неравномерности градаций серого изображения.
Таким образом, с помощью метода локальной бинаризации на основе изображения с блоками, выполнена бинаризация развертываемого изображения в градациях серого колонковой трубы керна. А после бинаризации (Фиг. 5), больная зона подавляется в определенной степени. Во время проведения прямой бинаризации без извлечения цвета пространства HSV (Фиг. 6), видно, что хотя характеристики трещин хорошо представлены, но трудно удаляется помеха фона.
Еще дальше, в шаге 6, осуществляется морфологическая обработка изображений. В бинарном изображении (Фиг. 5) с локальным порогом блока зоны, полученном в вышеуказанном шаге, видно, что все еще существует много белого цифрового шума. Поэтому для бинарного изображения колонковой трубы керна нужна морфологическая обработка, которая использует цифровую морфологию в качестве инструмента для извлечения из изображения компонентов изображения, полезных для выражения и описания формы зон, таких как расширение, коррозии, операции открытия и закрытия, обработка связной области и т.д. Коррозия может устранить пограничные точки и пограничные дискретные точки. Расширение - это расширение наиболее ярких частей изображения, так что близкие, но отсоединенные трещины могут быть объединены, для создания одной связной области. Сначала для бинарного изображения осуществляется обработка операции открытия, а операция открытия на самом деле является процессом операции сначала для коррозии и потом расширения. Из-за этого, могут быть устранены мелкие объекты, а также отдельные объекты в тонких местах, чтобы сделать большие объекты сглаженными и удалить шум мелкой зернистости без заметного изменения площади объекта. А затем выполняется операция закрытия, чтобы соединяются места, где характеристики трещин прерывисты, и заполняются мелкие пустоты. Наконец, осуществляется очистка порогов площади связной области, и выполняется зрительное наблюдение за площадью зоны трещин в изображении, устанавливается порог площади, удаляется связная область, которая меньше порога площади, и в конце концов завершается морфологическая обработка бинарного изображения.
Способ распознавания трещин в развертываемом изображении колонковой трубы бурового керна имеет очень хороший эффект распознавания трещин с заметными цветовыми характеристиками. В (Фиг. 7) показано окончательное изображение после использования способа распознавания трещин по настоящему изобретению. Ядро настоящего изобретения заключается в том, что осуществлено преобразование изображения RGB в изображение цветовой пространственной области HSV до традиционной обработки цифровых изображений, и за счет извлечения определенного цвета, то есть цветовых характеристик трещины, трещины точно распознаются и извлекаются, а затем выполнено преобразование к изображению RGB для оцифровки изображения. Этот способ добавляет метод бинаризации локального порога под блоками зоны изображения в обычном методе бинарнизации, так что разделение трещин и фона более очевидно, и удаляются зоны помех большой площади для точного сохранения трещины. В конце конов, осуществляется подавление цифрового шума в бинарном изображении с помощью морфологической обработки, и наконец реализовано точное распознавание трещин.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАЗДЕЛЕНИЕ ИЗОБРАЖЕНИЙ НА ОБОСОБЛЕННЫЕ ЦВЕТОВЫЕ СЛОИ | 2021 |
|
RU2792722C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ТЕКСТА НА ИЗОБРАЖЕНИЯХ ДОКУМЕНТОВ | 2021 |
|
RU2768544C1 |
| Способ определения цветности фотографии владельца документа по изображению документа | 2023 |
|
RU2822677C1 |
| АВТОМАТИЧЕСКАЯ СЪЕМКА ДОКУМЕНТА С ЗАДАННЫМИ ПРОПОРЦИЯМИ | 2013 |
|
RU2541353C2 |
| Способ и система автоматизированного определения характеристик керна | 2024 |
|
RU2823446C1 |
| СПОСОБ, УСТРОЙСТВО СЕРВЕРА И УСТРОЙСТВО ТЕРМИНАЛА ДЛЯ ПРЕДОСТАВЛЕНИЯ ИЗОБРАЖЕНИЯ | 2014 |
|
RU2637876C2 |
| СПОСОБ КОРРЕКЦИИ ГРАДАЦИЙ И УСТРОЙСТВО ИЛИ СПОСОБ ОПРЕДЕЛЕНИЯ ПОРОГОВОГО ЗНАЧЕНИЯ ДЛЯ ЭПСИЛОН-ФИЛЬТРА | 2012 |
|
RU2611005C2 |
| СПОСОБ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ КАЧЕСТВА ПОВЕРХНОСТИ РЕЛЬСОВ | 2010 |
|
RU2426069C1 |
| МИКРОДИСПЛЕЙ НА ОСНОВЕ ОРГАНИЧЕСКИХ СВЕТОДИОДОВ | 2023 |
|
RU2819197C1 |
| СПОСОБ ИНДЕКСАЦИИ И ПОИСКА ЦИФРОВЫХ ИЗОБРАЖЕНИЙ | 2011 |
|
RU2510935C2 |


Изобретение относится к области измерительной техники и касается способа распознавания трещин в развертываемом изображении колонковой трубы бурового керна. Способ включает в себя получение изображения с помощью промышленных камер и преобразование импортированного исходного изображения из формата RGB в цветовое пространство HSV, распознавание характеристик трещин и их извлечение, преобразование изображения в формат RGB и обработку изображений регулируемой яркости, удаление из изображения идентификационной этикетки керна, локальную бинаризацию на основе блока изображения и морфологическую обработку изображений. Технический результат заключается в повышении точности и эффективности распознавания трещин на сложных фонах. 6 з.п. ф-лы, 7 ил.
1. Способ распознавания трещин в развертываемом изображении колонковой трубы бурового керна, отличающийся тем, что включает в себя:
шаг 1: получение изображения с помощью промышленных камер и преобразование импортированного исходного изображения из формата RGB в цветовое пространство HSV;
шаг 2: распознавание характеристик трещин и их извлечение;
шаг 3: преобразование изображения в формат RGB и обработка изображений регулируемой яркости;
шаг 4: удаление из изображения идентификационной этикетки керна;
шаг 5: локальная бинаризация на основе блока изображения;
шаг 6: морфологическая обработка изображений.
2. Способ распознавания трещин в развертываемом изображении колонковой трубы бурового керна по п.1, отличающийся чем, что керн фиксируют и получают развертываемое изображение колонковой трубы керна с помощью промышленных камер, вращая керн на один оборот.
3. Способ распознавания трещин в развертываемом изображении колонковой трубы бурового керна по п.2, отличающийся чем, что на исходном изображении, полученном и импортированном промышленной камерой в шаге 2, после преобразования изображения RGB в изображение цветового пространства HSV извлекают белые и яркие характеристики трещин в изображении, а также заполняют фон, несоответствующий характеристикам трещин, черным цветом.
4. Способ распознавания трещин в развертываемом изображении колонковой трубы бурового керна по п.3, отличающийся чем, что в шаге 3 обработка изображения регулируемой яркости включает в себя преобразование изображения RGB в изображение в
градациях серого в соответствии с соотношением:
Grey=0.299×R+0.587×G+0.114×B,
где Grey является значением градации серого в пределах [0, 255], а R, G и B соответственно представляют значения в трех каналах RGB; при этом по очереди считают значения R, G, B каждого пиксела, вычисляют значения градации серого и присваивают значение градации серого для соответствующего положения изображения.
5. Способ распознавания трещин в развертываемом изображении колонковой трубы бурового керна по п.4, отличающийся чем, что в шаге 4 устанавливают скользящее окно размером ω×ω, при скольжении окна к этикетке окно полностью заполняют значением градации серого 255 и получают изображение в градациях серого колонковой трубы бурового керна, в котором удалена этикетка.
6. Способ распознавания трещин в развертываемом изображении колонковой трубы бурового керна по п.5, отличающийся чем, что в шаге 5 осуществляют зональную бинаризацию полученного изображения в градациях серого на основе блоков изображения; выбирают пороговое значение ϕ, и проверяют каждый блок с использованием значения ϕ и величины μ(m, n), которая представляет собой среднее абсолютное отклонение блока зоны (m, n) и характеризует резкость изменения градаций серого в зоне; при этом величина μ(m,n)>ϕ, указывает на наличие трещин, а величина μ(m,n)≤ϕ указывает на то, что зона находится в фоновой зоне или фоновой зоне помех;
при этом используется бинаризация по методу Нобуюки Оцу (Otsu):

где N0, N1 является количеством пикселов, относящихся к цели и фону, N - общее количество пикселов в зоне (m, n), ω0, ω1 - отношение количества пикселов цели к общему количеству пикселов и отношение количества пикселов фона к общему количеству пикселов соответственно, τ0 и τ1 - среднее значение градаций серого пикселов цели и среднее значение градаций серого пикселов фона, τ - среднее значение градации серого пикселов всего блока зоны,  - дисперсия между классами;
- дисперсия между классами;
для сегментации порогов используется алгоритм Niblack на основе локальных характеристик изображения в градациях серого:

где, (x,y) - точка пикселов центра окна ω×ω, k(x,y) - выборочное среднее значение в окрестности w×w данной точки, l(x,y) - стандартное отклонение в окрестности w×w данной точки, β - диапазон выбора поправочного коэффициента в [0, 1], g(x,y) - значение градаций серого пикселов данной точки, T(x,y) - порог бинаризации данной точки пикселов.
7. Способ распознавания трещин в развертываемом изображении колонковой трубы бурового керна по п.6, отличающийся чем, морфологическая обработка включает в себя подавление цифрового шума в бинарном изображении с помощью морфологической обработки.
| СПОСОБ ИССЛЕДОВАНИЯ КЕРНА ГОРНЫХ ПОРОД | 2012 |
|
RU2501046C1 |
| CN 113222923 A, 06.08.2021 | |||
| CN 112991370 A, 18.06.2021 | |||
| WO 2006065180 A1, 22.06.2006. | |||

