Изобретение относится к визуализации результатов ультразвукового неразрушающего контроля и может быть использовано при ультразвуковом контроле изделия с плоской и криволинейной внешней поверхностью и одностороннем доступе, например, шейки коленчатых валов двигателей внутреннего сгорания, трубопроводов или трубопроводов с конусной поверхностью.
Известен акустический блок [RU 156012 U1, МПК G01N29/04 (2006.01), опубл. 27.10.2015], содержащий держатель преобразователя, установленный в корпусе, который размещен с возможностью поворота на шарнирах в оправе, установленной на раме и подпружиненной относительно нее. Держатель установлен в корпусе с возможностью возвратно-поступательного перемещения и фиксации в заданном положении и оснащен цанговым механизмом, предназначенным для крепления преобразователя. Механизм настройки фокусного расстояния от преобразователя до поверхности контролируемого изделия, выполнен в виде установленной на держателе зубчатой рейки, с которой находится в зацеплении вал-шестерня, смонтированная с возможностью вращения в корпусе.
Недостатком устройства является невозможность получения томограммы.
Известно устройство ультразвуковой томографии [RU 2796813 С1, МПК G01N29/06 (2006.01), опубл. 29.05.2023], выбранное в качестве прототипа, содержащее установленную на объект контроля гибкую антенную решетку для размещения вплотную на плоской или криволинейной внешней поверхности объекта контроля, расположенного в иммерсионной ванне, с n приемно-передающими элементами, каждый из которых связан с выходом соответствующего генератора импульсов и с входом соответствующей цепочки последовательно соединенных усилителя и аналого-цифрового преобразователя. Выход каждой из n указанных цепочек соединен с соответствующим входом блока памяти реализаций, количество выходов которой N определено формулой:
N=n⋅(n+1)/2.
Выходы блока памяти реализаций соединены с соответствующими входами вычислительного блока, который связан с блоком накопительной памяти и с дисплеем через блок памяти изображения. Входы синхронизации каждого генератора импульсов, блока памяти реализаций, вычислительного блока и блока памяти изображения соединены с соответствующими выходами блока синхронизации. С обратной стороны гибкой антенной решетки установлен акустический датчик так, что он погружен в иммерсионную жидкость, а гибкая антенная решетка полностью расположена в его акустическом поле. Акустический датчик соединен с усилителем, выход которого связан с первым входом компаратора, второй вход которого соединен с источником опорного напряжения. Выход компаратора соединен с вычислительным блоком.
Недостатком данного устройства является невозможность корректного определения координат каждого элемента гибкой антенной решетки, например, при расположении гибкой антенной решетки на кольце подшипника, а акустического датчика на оси симметрии гибкой антенной решетки, расстояние между акустическим датчиком и первым элементом гибкой антенной решетки будет равно расстоянию между последним элементом гибкой антенной решетки и акустическим датчиком, аналогичная ситуация будет со вторым и предпоследним элементами гибкой антенной решетки, что можно интерпретировать как расположение этих элементов в одном месте. Еще более неоднозначная ситуация возникает при расположении гибкой антенной решетки на волнистой поверхности объекта контроля, при этом одинаковое расстояние до акустического датчика может оказаться сразу у нескольких элементов гибкой антенной решетки, и, следовательно, будет невозможна корректная реконструкция томограммы методом полной фокусировки.
Техническим результатом предложенного устройства является достоверное определение координат элементов гибкой антенной решетки и соответственно правильная реконструкция томограммы.
Предложенное устройство ультразвуковой томографии, также как в прототипе, содержит гибкую антенную решетку с n приемно-передающими элементами, установленную вплотную на плоской или криволинейной внешней поверхности объекта контроля, расположенного в иммерсионной ванне, причем каждый приемно-передающий элемент связан с выходом соответствующего генератора импульсов и с входом соответствующей цепочки последовательно соединенных усилителя и аналого-цифрового преобразователя, выход каждой из n указанных цепочек соединен с соответствующим входом блока памяти реализаций, количество выходов которого N определено формулой:
N=n⋅(n+1)/2,
выходы блока памяти реализаций соединены с соответствующими входами вычислительного блока, который связан с блоком накопительной памяти и с дисплеем через блок памяти изображения, входы синхронизации каждого генератора импульсов, блока памяти реализаций, вычислительного блока и блока памяти изображения соединены с соответствующими выходами блока синхронизации, с обратной стороны гибкой антенной решетки установлен акустический датчик так, что он погружен в иммерсионную жидкость, а гибкая антенная решетка полностью расположена в его акустическом поле, акустический датчик соединен с усилителем, выход которого связан с первым входом компаратора, второй вход которого соединен с источником опорного напряжения.
Согласно изобретению, с обратной стороны гибкой антенной решетки дополнительно установлены еще два акустических датчика, причем все акустические датчики расположены в вершинах произвольного треугольника на пластине, прикрепленной к кронштейну на краю иммерсионной ванны так, что они погружены в иммерсионную жидкость, а гибкая антенная решетка полностью расположена в их акустическом поле. Каждый акустический датчик последовательно соединен с усилителем, первым входом компаратора, измерителем временного интервала и с блоком вычисления координат. Второй вход каждого компаратора соединен с источником опорного напряжения. Каждый измеритель временного интервала связан с блоком синхронизации и с выходом логического сумматора, входы которого соединены с входами генераторов импульсов и входами блока вычисления координат, который связан с вычислительным блоком.
Таким образом, предложенное использование трех акустических датчиков, расположенных с обратной стороны гибкой антенной решетки, позволяет корректно определять координаты каждого приемно-передающего элемента гибкой антенной решетки методом триангуляции и используя полученные координаты проводить корректную реконструкцию томограммы зоны контроля изделия с плоскими и криволинейными внешними поверхностями, причем начало отсчета координат может быть выбрано в точке расположения одного из акустических датчиков.
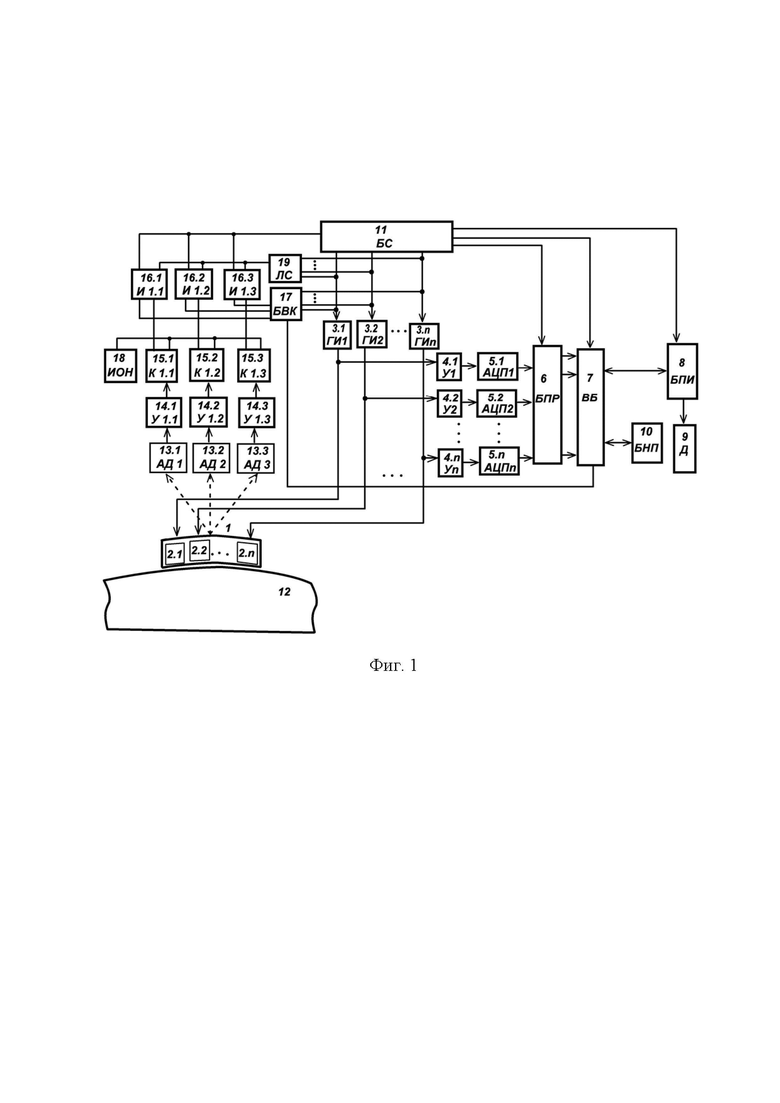
На фиг. 1 приведена структурная схема заявляемого устройства.
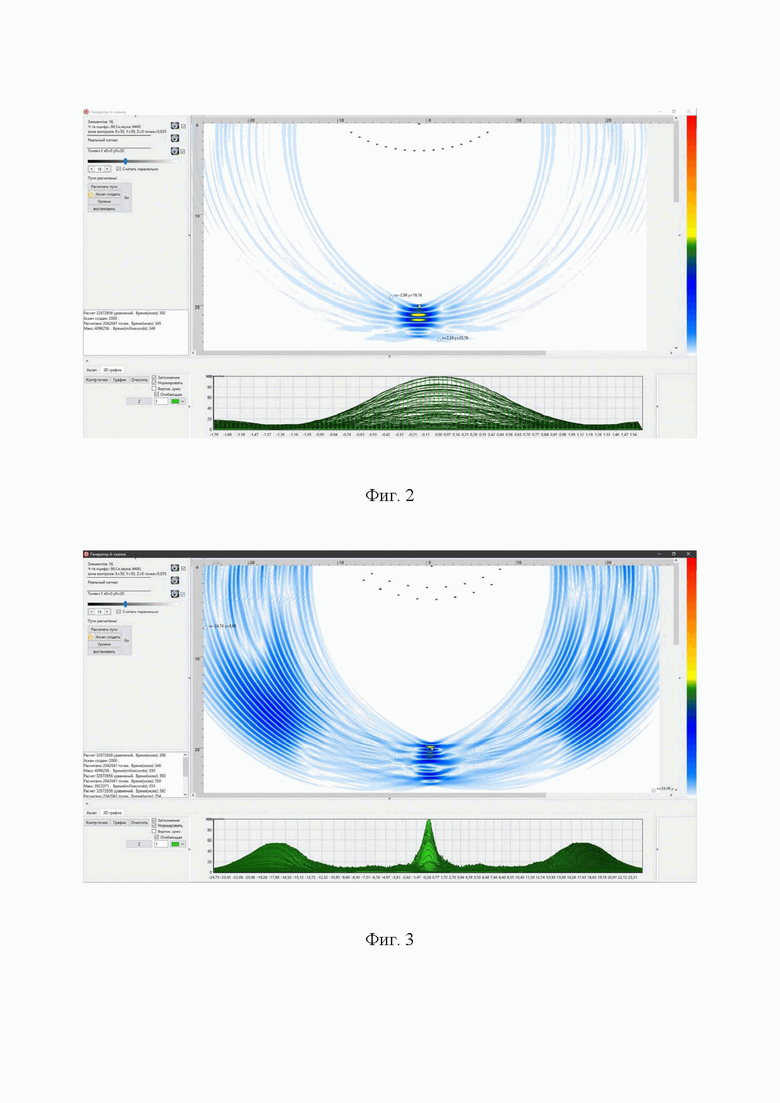
На фиг. 2 показана томограмма зоны контроля изделия с криволинейной поверхностью и искусственно внесенным дефектом.
На фиг. 3 показана томограмма зоны контроля этого же изделия, полученная с помощью прототипа.
Устройство ультразвуковой томографии содержит гибкую антенную решетку 1 с n приемно-передающими элементами 2.1, 2.2, …, 2.n, каждый из которых соединен с выходом соответствующего генератора импульсов 3.1 (ГИ1), 3.2 (ГИ2), …, 3.n (ГИn) и входом соответствующей цепочки последовательно соединенных усилителя 4.1 (У1), 4.2. (У2), …, 4.n (Уn) и аналого-цифрового преобразователя 5.1 (АЦП1), 5.2 (АЦП2), …, 5.n (АЦПn).
Выход каждого аналого-цифрового преобразователя 5.1 (АЦП1), 5.2 (АЦП2), …, 5.n (АЦПn) соединен с соответствующим входом блока памяти реализаций 6 (БПР), количество выходов которого N определено формулой:
N=n·(n+1)/2.
N выходов блока памяти реализаций 6 (БПР) по количеству принятых реализаций ультразвуковых сигналов соединены с соответствующими входами вычислительного блока 7 (ВБ), который связан с блоком памяти изображений 8 (БПИ), соединенным с дисплеем 9 (Д).
С вычислительным блоком 7 (ВБ) соединен блок накопительной памяти 10 (БНП). Входы синхронизации каждого генератора импульсов 3.1 (ГИ1), 3.2 (ГИ2), …, 3.n (ГИn), блока памяти реализаций 6 (БПР), вычислительного блока 7 (ВБ) и блока памяти изображения 8 (БПИ) соединены с соответствующими выходами блока синхронизации 11 (БС).
Гибкая антенная решетка 1 вплотную размещена на поверхности объекта контроля 12, помещенного в иммерсионную ванну, наполненную иммерсионной жидкостью. На пластине, закрепленной на кронштейне на краю иммерсионной ванны, установлены три акустических датчика 13.1 (АД1), 13.2 (АД2) и 13.3 (АД3) так, что они находятся в иммерсионной жидкости в вершинах произвольного треугольника, а гибкая антенная решетка 1 полностью расположена в их акустическом поле.
Каждый акустический датчик 13.1 (АД1), 13.2 (АД2), 13.3 (АД3) связан через соответствующие, последовательно соединенные усилитель 14.1 (У1.1), 14.2 (У2), 14.3 (У3), компаратор 15.1 (К1), 15.2 (К2), 15.3 (К3) и измеритель временных интервалов 16.1 (И1), 16.2 (И2), 16.3 (И3) с блоком вычисления координат 17 (БВК), выход которого связан с вычислительным блоком 7 (ВБ) Второй вход каждого компаратора 15.1 (К1), 15.2 (К2), 15.3 (К3) соединен с источником опорного напряжения 18 (ИОН). Каждый измеритель временных интервалов 16.1 (И1), 16.2 (И2), 16.3 (И3) связан с выходом логического сумматора 19 (ЛС), входы которого подключены к входам генераторов импульсов 3.1 (ГИ1), 3.2 (ГИ2), …, 3.n (ГИn) и к входам блока вычисления координат 17 (БВК). Каждый измеритель временных интервалов 16.1 (И1), 16.2 (И2), 16.3 (И3) связан с блоком синхронизации 11 (БС).
Гибкая антенная решетка 1 является набором 16 или более приемно-передающих элементов, располагаемых матрично или линейно, например, S564-1,0*10 фирмы Doppler. Генераторы импульсов 3.1 (ГИ1), 3.2 (ГИ2), …, 3.n (ГИn) выполнены на микросхемах, имеющих импульсный ток коллектора не менее 2А и выходное напряжение 90 В, например, STHV748. Усилители 4.1 (У1), 4.2. (У2), …, 4.n (Уn), 14.1 (У1), 14.2 (У2), 14.3 (У3) выполнены по типовой схеме, например, на микросхемах AD603. Аналого-цифровые преобразователи 5.1 (АЦП1), 5.2 (АЦП2), …, 5.n (АЦПn) выполнены, например, на микросхемах ADС9057. Блок памяти реализаций 6 (БПР), объемом не менее 64 Кб, выполнен на типовых микросхемах, например, на микросхемах IDT72V293. Вычислительный блок 7 (ВБ) может быть выполнен на микроконтроллере, например, ATMEGA64, фирмы ATMEL. Блок памяти изображения 8 (БПИ) и блок накопительной памяти 10 (БНП) объемом не менее 100 МГб, могут быть выполнены, например, на модулях памяти, используемых в персональных компьютерах, 1ГБ DDR SDRAM PC3200, 400МГц. Дисплей 9 (Д) выполнен на матричной панели или на мониторе персонального компьютера, например, BENQ G2320HDB. Блок синхронизации 11 (БС) может быть выполнен на микроконтроллере, например, ATMEGA64, фирмы ATMEL. Акустические датчики 13.1 (АД1), 13.2 (АД2), 13.3 (АД3) могут быть типовыми, например, SF5020 (П111-5,0-К20). Компараторы 15.1 (К1), 15.2 (К2), 15.3 (К3) могут быть типовыми, например, К521СА3. Измерители временных интервалов 16.1 (И1), 16.2 (И2), 16.3 (И3) могут быть реализованы на двоичных счетчиках, например К1533 ИЕ7. Блок вычисления координат 17 (БВК() может быть реализован на высокопроизводительном микроконтроллере, например STM32. Источник опорного напряжения 18 (ИОН) может быть выполнен на типовой микросхеме, например, AD680ARZ. Логический сумматор может быть реализован на логических элементах, реализующих функцию «ИЛИ», например, К1533 ЛИ1.
Устройство работает следующим образом.
Объект контроля 12, например, с криволинейной поверхностью, помещают в иммерсионную ванну, заполненную иммерсионной жидкостью. Гибкую антенную решетку 1 вплотную размещают на поверхности объекта контроля 12. Акустические датчики 13.1 (АД1), 13.2 (АД2), 13.3 (АД3), расположенные с другой стороны от гибкой антенной решетки 1, полностью погружены в иммерсионную жидкость так, что гибкая антенная решетка 1 полностью находится в их акустическом поле.
По сигналу от блока синхронизации 11 (БС) измерители временных интервалов 16.1 (И1), 16.2 (И2), 16.3 (И3) устанавливаются в нулевое состояние, затем блок синхронизации 11 (БС) подает сигнал на первый генератор импульсов 3.1 (ГИ1), который формирует сигнал возбуждения для первого приемо-передающего элемента 2.1 гибкой акустической решетки 1. Этот же сигнал от блока синхронизации 11 (БС) поступает в блок вычисления координат 17 (БВК) для получения информации о работе первого приемо-передающего элемента 2.1 гибкой акустической решетки 1 и в логический сумматор 19 (ЛС), выходной сигнал которого запускает измерители временных интервалов 16.1 (И1), 16.2 (И2), 16.3 (И3). В объект контроля 12 излучается зондирующий сигнал. В этот момент все приемно-передающие элементы 2.1, 2.2, …, 2.n, начинают принимать ультразвуковые сигналы из объекта контроля 12. Эти сигналы, преобразованные в электрические, усиливаются в соответствующих усилителях 4.1 (У1), 4.2. (У2), …, 4.n (Уn), оцифровываются в аналого-цифровых преобразователях 5.1 (АЦП1), 5.2 (АЦП2), …, 5.n (АЦПn) и записываются в блок памяти реализаций 6 (БПР) независимо друг от друга, без каких-либо преобразований и временных сдвигов. Эти сигналы записываются в интервале времени, превышающем с некоторым запасом время распространения ультразвуковых сигналов от излучающего первого приемо-передающего элемента 2.1 гибкой антенной решетки 1 к наиболее дальней визуализируемой точке объекта контроля 12 и обратно - к самому удаленному от нее приемо-передающему элементу 2.n гибкой антенной решетки 1. Одновременно с этим процессом происходит прием сигнала, излученного обратной стороной первого приемо-передающего элемента 2.1 гибкой антенной решетки 1, акустическими датчиками 13.1 (АД1), 13.2 (АД2) и 13.3 (АД3), его усиление усилителями 14.1 (У1), 14.2 (У2) и 14.3 (У3). При превышении этим сигналом порогового уровня, который задается источником опорного напряжения 18 (ИОН), компараторы 15.1 (К1), 15.2 (К2) и 15.3 (К3) выдают сигналы на измерители временных интервалов 16.1 (И1), 16.2 (И2) и 16.3 (И3) останавливая их работу. Информация о длительности временных интервалов поступает в блок вычисления координат 17 (БВК), который вычисляет координаты ( ,
,  ,
,  ) первого приемо-передающего элемента 2.1 гибкой антенной решетки 1 методом триангуляции, решая систему трех уравнений:
) первого приемо-передающего элемента 2.1 гибкой антенной решетки 1 методом триангуляции, решая систему трех уравнений:
.  ,
,
где  ,
,  ,
,  - координаты первого акустического датчика;
- координаты первого акустического датчика;
 ,
,  ,
,  - координаты второго акустического датчика;
- координаты второго акустического датчика;
 ,
,  ,
,  - координаты третьего акустического датчика;
- координаты третьего акустического датчика;
, , - координаты первого элемента гибкой акустической решетки;
 - расстояние между первым акустическим датчиком и первым элементом гибкой антенной решетки;
- расстояние между первым акустическим датчиком и первым элементом гибкой антенной решетки;
 - расстояние между вторым акустическим датчиком и первым элементом гибкой антенной решетки;
- расстояние между вторым акустическим датчиком и первым элементом гибкой антенной решетки;
 - расстояние между третьим акустическим датчиком и первым элементом гибкой антенной решетки.
- расстояние между третьим акустическим датчиком и первым элементом гибкой антенной решетки.
Рассчитанные координаты блок вычисления координат 16 (БВК) передает в вычислительный блок 7 (ВБ).
Далее по сигналу от блока синхронизации 11 (БС) измерители временных интервалов 16.1 (И1), 16.2 (И2), 16.3 (И3) устанавливаются в нулевое состояние, а второй генератор импульсов 3.2 (ГИ2) по сигналу от блока синхронизации 11 (БС) возбуждает второй приемо-передающий элемент 2.2 гибкой антенной решетки 1, который посылает в объект контроля 12 зондирующий сигнал. Этот же сигнал от блока синхронизации 11 (БС) поступает в блок вычисления координат 17 (БВК) для получения информации о работе второго приемо-передающего элемента 2.2 гибкой акустической решетки 1 и в логический сумматор 19 (ЛС), выходной сигнал которого запускает измерители временных интервалов 16.1 (И1), 16.2 (И2) и 16.3 (И3). Снова происходит прием и запись принятых сигналов в блок памяти реализаций 6 (БПР). Но сигналы, принятые первым приемо-передающим элементом 2.1, в данном случае не записываются, так как реализация этих сигналов, согласно принципу взаимности, тождественна той, которая уже была принята вторым приемо-передающим элементом 2.2 при посылке зондирующего сигнала ее первым приемо-передающим элементом 2.1 в предыдущем цикле зондирования-приема ультразвуковых сигналов. Одновременно с этим процессом происходит прием сигнала, излученного обратной стороной второго приемо-передающего элемента 2.2, акустическими датчиками 13.1 (АД1), 13.2 (АД2) и 13.3 (АД3), его усиление усилителями 14.1 (У1), 14.2 (У2) и 14.3 (У3). При превышении этим сигналом порогового уровня, который задается источником опорного напряжения 17 (ИОН), компараторы 15.1 (К1), 15.2 (К2) и 15.3 (К3) выдают сигналы на измерители временных интервалов 16.1 (И1), 16.2 (И2) и 16.3 (И3) останавливая их работу. Информация о длительности временных интервалов поступает в блок вычисления координат 17 (БВК), который вычисляет координаты ( ,
,  ,
,  ) второго приемо-передающего элемента 2.2 гибкой антенной решетки 1 методом триангуляции, решая систему трех уравнений:
) второго приемо-передающего элемента 2.2 гибкой антенной решетки 1 методом триангуляции, решая систему трех уравнений:
.  ,
,
где , , - координаты первого акустического датчика;
, , - координаты второго акустического датчика;
, , - координаты третьего акустического датчика;
, , - координаты второго элемента гибкой акустической решетки;
 - расстояние между первым акустическим датчиком и вторым элементом гибкой антенной решетки;
- расстояние между первым акустическим датчиком и вторым элементом гибкой антенной решетки;
 - расстояние между вторым акустическим датчиком и вторым элементом гибкой антенной решетки;
- расстояние между вторым акустическим датчиком и вторым элементом гибкой антенной решетки;
 - расстояние между третьим акустическим датчиком и вторым элементом гибкой антенной решетки.
- расстояние между третьим акустическим датчиком и вторым элементом гибкой антенной решетки.
Рассчитанные координаты блок вычисления координат 17 (БВК) передает в вычислительный блок 7 (ВБ).
Затем в третьем цикле зондирования-приема ультразвуковых сигналов все происходит аналогично изложенному выше, по сигналу от блока синхронизации 11 (БС) измерители временных интервалов 16.1 (И1), 16.2 (И2), 16.3 (И3) устанавливаются в нулевое состояние, а третий генератор импульсов 3.3 (ГИ3) по сигналу от блока синхронизации 11 (БС) возбуждает третий приемо-передающий элемент 2.3 гибкой антенной решетки 1, который посылает в объект контроля 12 зондирующий сигнал. Этот же сигнал от блока синхронизации 11 (БС) поступает в блок вычисления координат 17 (БВК) для получения информации о работе третьего приемо-передающего элемента 2.3 гибкой акустической решетки 1 и в логический сумматор 19 (ЛС), выходной сигнал которого запускает измерители временных интервалов 16.1 (И1), 16.2 (И2), 16.3 (И3). Снова происходит прием и запись принятых сигналов в блок памяти реализаций 6 (БПР), но сигналы от первого 2.1 и второго 2.2 приемо-передающих элементов гибкой акустической решетки 1 не записываются. Одновременно с этим процессом происходит прием сигнала, излученного обратной стороной третьего приемо-передающего элемента 2.3, акустическими датчиками 13.1 (АД1), 13.2 (АД2), 13.3 (АД3), его усиление усилителями 14.1 (У1), 14.2 (У2), 14.3 (У3). При превышении этим сигналом порогового уровня, который задается источником опорного напряжения 16 (ИОН), компараторы 15.1 (К1), 15.2 (К2) и 15.3 (К3) выдают сигналы на измерители временных интервалов 16.1 (И1), 16.2 (И2) и 16.3 (И3) останавливая их работу. Информация о длительности временных интервалов поступает в блок вычисления координат 17 (БВК), который вычисляет координаты ( ,
,  ,
,  ) третьего приемо-передающего элемента 2.3 гибкой антенной решетки 1 методом триангуляции, решая систему трех уравнений:
) третьего приемо-передающего элемента 2.3 гибкой антенной решетки 1 методом триангуляции, решая систему трех уравнений:
.  ,
,
где , , - координаты первого акустического датчика;
, , - координаты второго акустического датчика;
, , - координаты третьего акустического датчика;
, , - координаты третьего элемента гибкой акустической решетки;
 - расстояние между первым акустическим датчиком и третьим элементом гибкой антенной решетки;
- расстояние между первым акустическим датчиком и третьим элементом гибкой антенной решетки;
 - расстояние между вторым акустическим датчиком и третьим элементом гибкой антенной решетки;
- расстояние между вторым акустическим датчиком и третьим элементом гибкой антенной решетки;
 - расстояние между третьим акустическим датчиком и третьим элементом гибкой антенной решетки.
- расстояние между третьим акустическим датчиком и третьим элементом гибкой антенной решетки.
Рассчитанные координаты блок вычисления координат 17 (БВК) передает в вычислительный блок 7 (ВБ).
В последнем, n-ном цикле зондирования-приема по сигналу от блока синхронизации 11 (БС) измерители временных интервалов 16.1 (И1), 16.2 (И2), 16.3 (И3) устанавливаются в нулевое состояние, а n-ный генератор импульсов 3.n (ГИn) по сигналу от блока синхронизации 11 (БС) возбуждает n-ный приемо-передающий элемент 2.n гибкой антенной решетки 1, который посылает в объект контроля 12 зондирующий сигнал. Этот же сигнал от блока синхронизации 11 (БС) поступает в блок вычисления координат 17 (БВК) для получения информации о работе n-ного приемо-передающего элемента 2.n гибкой акустической решетки 1 и в логический сумматор 19 (ЛС), выходной сигнал которого запускает измерители временных интервалов 16.1 (И1), 16.2 (И2) и 16.3 (И3). Снова происходит прием и запись принятых сигналов в блок памяти реализаций 6 (БПР), но в блок памяти реализаций 6 (БПР) записывается всего одна реализация принятых сигналов. Одновременно с этим процессом происходит прием сигнала, излученного обратной стороной n-ного приемо-передающего элемента 2.n, акустическими датчиками 13.1 (АД1), 13.2 (АД2) и 13.3 (АД3), его усиление усилителями 14.1 (У1), 14.2 (У2) и 14.3 (У3). При превышении этим сигналом порогового уровня, который задается источником опорного напряжения 16 (ИОН), компараторы 15.1 (К1), 15.2 (К2), 15.3 (К3) выдают сигналы на измерители временных интервалов 16.1 (И1), 16.2 (И2) и 16.3 (И3) останавливая их работу. Информация о длительности временных интервалов поступает в блок вычисления координат 17 (БВК), который вычисляет координаты ( ,
,  ,
,  ) n-ного приемо-передающего элемента 2.n гибкой антенной решетки 1 методом триангуляции, решая систему трех уравнений:
) n-ного приемо-передающего элемента 2.n гибкой антенной решетки 1 методом триангуляции, решая систему трех уравнений:
.  ,
,
где , , - координаты первого акустического датчика;
, , - координаты второго акустического датчика;
, , - координаты третьего акустического датчика;
, , - координаты n-го элемента гибкой акустической решетки;
 - расстояние между первым акустическим датчиком и n-ым элементом гибкой антенной решетки;
- расстояние между первым акустическим датчиком и n-ым элементом гибкой антенной решетки;
 - расстояние между вторым акустическим датчиком и n-ым элементом гибкой антенной решетки;
- расстояние между вторым акустическим датчиком и n-ым элементом гибкой антенной решетки;
 - расстояние между третьим акустическим датчиком и n-ым элементом гибкой антенной решетки.
- расстояние между третьим акустическим датчиком и n-ым элементом гибкой антенной решетки.
Рассчитанные координаты блок вычисления координат 17 (БВК) передает в вычислительный блок 7 (ВБ).
После выполнения всех этих циклов зондирования-приема ультразвуковых сигналов, то есть после того как все приемо-передающие элементы 2 гибкой антенной решетки 1 совершат по одной посылке зондирующего сигнала, в блоке памяти реализаций 6 (БПР) оказываются записанными N=n·(n+1)/2 реализаций принятых сигналов. Каждая реализация - это результат зондирования и приема сигналов каждой из возможных пар приемо-передающих элементов 2.1, 2.2, …, 2.n включая и совмещенные пары, когда излучатель и приемник - один и тот же элемент. В частности, если n=16, количество реализаций N=136.
После этого начинается реконструкция изображения внутренней структуры объекта контроля 12 поочередно для каждой визуализируемой точки. Для этого вычислительный блок 7 (ВБ) реализует функцию:
 ,
,
где uA(t) - суммарный сигнал, принятый гибкой антенной решеткой из точки А(x, z) объекта контроля с координатами (x, z);
i, j - номера передающих и приемных элементов гибкой антенной решетки соответственно;
I, R - общее количество отражений ультразвукового сигнала от обеих границ объекта контроля на прямом пути от гибкой антенной решетки к точке А(x, z) и на обратном пути от точки А(x, z) к гибкой антенной решетке соответственно;
М - максимальное количество отражений ультразвукового сигнала от обеих границ объекта контроля отдельно на прямом и обратном путях распространения сигнала, используемое при реконструкции изображения;
ui,j - фрагмент реализации, полученной от элементов i, j антенной решетки;
t - текущее время;
tAi,j(I, R) - время задержки фрагмента ui,j реализации, содержащего сигнал, прошедший по траектории с общим количеством (I+R) отражений от обеих границ объекта контроля;
τu - длительность зондирующего сигнала.
Полученный суммарный сигнал uA(t) для каждой визуализируемой точки сохраняется в блоке накопительной памяти 10 (БНП), а затем в вычислительном блоке 7 (ВБ) суммарный сигнал uA(t) детектируется (вычисляется его огибающая) и значение UA максимума полученной функции записывается в блок памяти изображения 8 (БПИ). Это значение (число) кодируется в градациях серого или цветом для отображения на экране дисплея 9 (Д).
На фиг. 2 показана томограмма зоны контроля изделия с криволинейной поверхностью и искусственно внесенным дефектом, полученная с помощью предлагаемого устройства. Гибкую антенную решетку 1 располагали сверху изделия и плотно прижимали к поверхности. Частота излучения составила 5 МГц. На томограмме отображается в виде темно-синего пятна акустический образ дефекта. Расстояния от решетки до дефекта составило 21 мм.
На фиг. 3 показана томограмма зоны контроля этого же изделия, полученная с помощью прототипа. На термограмме отображается в виде темно-синих пятен акустический образ трех дефектов вместо одного.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УЛЬТРАЗВУКОВОЙ ТОМОГРАФИИ | 2023 |
|
RU2817123C1 |
| УСТРОЙСТВО УЛЬТРАЗВУКОВОЙ ТОМОГРАФИИ | 2023 |
|
RU2796813C1 |
| СПОСОБ УЛЬТРАЗВУКОВОЙ ТОМОГРАФИИ | 2023 |
|
RU2799111C1 |
| УСТРОЙСТВО УЛЬТРАЗВУКОВОЙ ТОМОГРАФИИ | 2013 |
|
RU2532606C1 |
| УСТРОЙСТВО УЛЬТРАЗВУКОВОЙ ТОМОГРАФИИ | 2018 |
|
RU2675214C1 |
| СПОСОБ УЛЬТРАЗВУКОВОЙ ТОМОГРАФИИ | 2018 |
|
RU2675217C1 |
| Способ цикловой синхронизации с динамической адресацией получателя | 2016 |
|
RU2621181C1 |
| Устройство для передачи радиотелеметрических сигналов | 1990 |
|
SU1714368A1 |
| СИСТЕМА РАДИОСВЯЗИ С МНОЖЕСТВЕННЫМ ДОСТУПОМ | 2007 |
|
RU2327288C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ ПАРАМЕТРОВ АТМОСФЕРЫ | 2012 |
|
RU2485676C1 |
Использование: для ультразвуковой томографии. Сущность изобретения заключается в том, что устройство ультразвуковой томографии содержит гибкую антенную решетку с n приемно-передающими элементами, установленную вплотную на плоской или криволинейной внешней поверхности объекта контроля, расположенного в иммерсионной ванне. Каждый приемно-передающий элемент связан с выходом соответствующего генератора импульсов и с входом соответствующей цепочки последовательно соединенных усилителя и аналого-цифрового преобразователя, выход каждой из n указанных цепочек соединен с соответствующим входом блока памяти реализаций, количество выходов которой N определено формулой: N=n⋅(n+1)/2. Выходы блока памяти реализаций соединены с соответствующими входами вычислительного блока, который связан с блоком накопительной памяти и с дисплеем через блок памяти изображения. Входы синхронизации каждого генератора импульсов, блока памяти реализаций, вычислительного блока и блока памяти изображения соединены с соответствующими выходами блока синхронизации. С обратной стороны гибкой антенной решетки установлен акустический датчик так, что он погружен в иммерсионную жидкость, а гибкая антенная решетка полностью расположена в его акустическом поле. Акустический датчик соединен с усилителем, выход которого связан с первым входом компаратора, второй вход которого соединен с источником опорного напряжения. Согласно изобретению с обратной стороны гибкой антенной решетки дополнительно установлены еще два акустических датчика, причем все акустические датчики расположены в вершинах произвольного треугольника на пластине, прикрепленной к кронштейну на краю иммерсионной ванны так, что они погружены в иммерсионную жидкость, а гибкая антенная решетка полностью расположена в их акустическом поле. Каждый акустический датчик последовательно соединен с усилителем, первым входом компаратора, измерителем временного интервала и с блоком вычисления координат. Второй вход каждого компаратора соединен с источником опорного напряжения. Каждый измеритель временного интервала связан с блоком синхронизации и с выходом логического сумматора, входы которого соединены с входами генераторов импульсов и входами блока вычисления координат, который связан с вычислительным блоком. Технический результат: обеспечение возможности достоверного определения координат элементов гибкой антенной решетки и соответственно достоверной реконструкции томограммы. 3 ил. 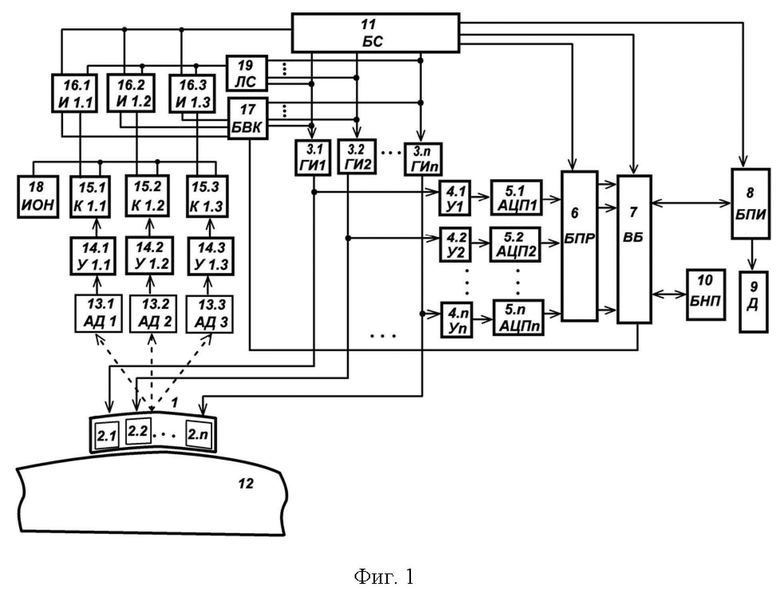
Устройство ультразвуковой томографии содержит гибкую антенную решетку с n приемно-передающими элементами, установленную вплотную на плоской или криволинейной внешней поверхности объекта контроля, расположенного в иммерсионной ванне, причем каждый приемно-передающий элемент связан с выходом соответствующего генератора импульсов и с входом соответствующей цепочки последовательно соединенных усилителя и аналого-цифрового преобразователя, выход каждой из n указанных цепочек соединен с соответствующим входом блока памяти реализаций, количество выходов которого N определено формулой:
N=n⋅(n+1)/2,
выходы блока памяти реализаций соединены с соответствующими входами вычислительного блока, который связан с блоком накопительной памяти и с дисплеем через блок памяти изображения, входы синхронизации каждого генератора импульсов, блока памяти реализаций, вычислительного блока и блока памяти изображения соединены с соответствующими выходами блока синхронизации, при этом с обратной стороны гибкой антенной решетки установлен акустический датчик так, что он погружен в иммерсионную жидкость, а гибкая антенная решетка полностью расположена в его акустическом поле, акустический датчик соединен с усилителем, выход которого связан с первым входом компаратора, второй вход которого соединен с источником опорного напряжения, отличающееся тем, что с обратной стороны гибкой антенной решетки дополнительно установлены еще два акустических датчика, причем все акустические датчики расположены в вершинах произвольного треугольника на пластине, прикрепленной к кронштейну на краю иммерсионной ванны так, что они погружены в иммерсионную жидкость, а гибкая антенная решетка полностью расположена в их акустическом поле, каждый акустический датчик последовательно соединен с усилителем, первым входом компаратора, измерителем временного интервала и с блоком вычисления координат, второй вход каждого компаратора соединен с источником опорного напряжения, каждый измеритель временного интервала связан с блоком синхронизации и с выходом логического сумматора, входы которого соединены с входами генераторов импульсов и входами блока вычисления координат, который связан с вычислительным блоком.
| УСТРОЙСТВО УЛЬТРАЗВУКОВОЙ ТОМОГРАФИИ | 2023 |
|
RU2796813C1 |
| УСТРОЙСТВО УЛЬТРАЗВУКОВОЙ ТОМОГРАФИИ | 2018 |
|
RU2675214C1 |
| УСТРОЙСТВО УЛЬТРАЗВУКОВОЙ ТОМОГРАФИИ | 2013 |
|
RU2532606C1 |
| СПОСОБ УЛЬТРАЗВУКОВОЙ ТОМОГРАФИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2458342C1 |
| JP 2009153573 A, 16.07.2009 | |||
| US 2005054924 A1, 10.03.2005. | |||

